1. Introduction
The inertial measurement unit (IMU) is the core sensor of the strapdown inertial navigation system (SINS). Its measurement accuracy is directly related to the navigation accuracy of SINS. The IMU manufacturing and installation errors cause navigation errors to accumulate over time [
1,
2]. The IMU calibration model is a mathematical relationship that reflects the sensor errors and environmental factors. Establishing a suitable IMU calibration model is a key technology for error compensation [
3,
4]. Therefore, it is necessary to establish an IMU error compensation model which meets the accuracy requirements and calibrate it accurately to improve the SINS accuracy [
5,
6,
7]. The IMU mathematical model is divided into the static mathematical model, dynamic mathematical model, and random mathematical model. This paper mainly studies the static mathematical model.
The machining and assembly processes cause the sensitive axis of the gyroscope and accelerometer not to coincide with the carrier coordinate system axis [
8,
9]. This leads to the installation error. In the navigation-grade SINS, the installation error is a very important parameter that affects the navigation output accuracy. In [
10], the SINS carries out the static navigation experiment. The results show that the attitude and velocity errors are significantly reduced after compensating for the installation error. In [
11], the influence of a fiber-optic gyroscope (FOG) installation error on the attitude heading reference system (AHRS) is simulated and analyzed. The results show that the attitude error caused by the gyroscope installation error is related to the carrier motion environment. The more intense the carrier motion, the bigger the attitude error. What is more serious is that if the carrier is in a rocking state, the installation error of the gyroscope will also stimulate other errors in the system. For the installation error of the accelerometer, the more severe the linear motion, the more obvious the velocity error caused by the accelerometer installation error.
Some researchers find a coupling between the accelerometer installation error and the gyroscope installation error. In [
12], it derives an IMU calibration model based on the velocity error. Based on the observability analysis method, it is found that there are three coupling relationships in the installation error parameters. The pulse output of the accelerometer is added to solve the problem that the installation error parameters cannot be fully identified. In fact, if the velocity and the attitude errors are used as observations at the same time, this coupling relationship will disappear. In [
13], it proposes a method of constraining the carrier coordinate system. Assume that the
x-axis of the carrier coordinate system coincides with the
x-axis of the acceleration coordinate system. This assumption can reduce the number of installation error angles. At the same time, the coupling between the accelerometer installation error and the gyro installation error is eliminated. However, ref. [
13] only studies the calibration scheme. It does not evaluate the impact of the simplified model on the navigation accuracy of SINS.
Some researchers calibrate the navigation-grade SINS by simplifying the installation error angles. In [
14], it proposes a hybrid calibration scheme aiming at the high-precision FOG IMU and ring laser gyroscope (RLG) IMU. It reduces the installation error angles of the gyroscope calibration model from six to three. In [
15], the ultrahigh precision IMU calibration model is studied. Additional g sensitivity errors, accelerometer cross-coupling, and lever arm errors are introduced. The model includes g sensitivity error, accelerometer cross-coupling error, and lever arm error. Although the gyroscope installation error is simplified, the filtering dimension is also as high as 51. In [
16], the gyroscopes and the accelerometers are almost orthogonal. It is defined as the
x-axis of the inertial sensor assembly (ISA) coinciding with the
x-axis of the platform coordinate system. In this way, the transformation matrices of the platform coordinate system relative to the accelerometer coordinate system and the platform coordinate system relative to the gyroscope coordinate system are simplified to lower triangular matrices. In [
17,
18], one axis of the accelerometer coordinate system is assumed to coincide with one axis of the carrier coordinate system. Thus, the installation error of the accelerometer assembly is represented by three small angles, and the installation error of the accelerometer assembly is expressed with three small angles. The accelerometer installation error matrix is simplified as a lower triangular matrix to achieve a certain constraint. In [
19], the multiposition calibration method is optimized for the IMU nonlinear scale factor. However, in the deterministic error model, the installation error number of the gyroscope and accelerometer are all simplified to three. In [
20,
21,
22,
23,
24], the installation error of ISA is also simplified. In commercial grade or tactical grade SINS, simplifying the IMU installation error can meet the requirement of system accuracy. Except for high-precision navigation-grade SINS, the simplified installation error model has a serious impact on system accuracy. So, the indepth analysis of the installation error matrix is important in engineering applications. This paper mainly focuses on the following problems. How to describe the installation error of inertial sensor assembly by mathematical model? What are the geometric characteristics of the installation error matrix? How does the simplified installation error matrix affect the navigation system?
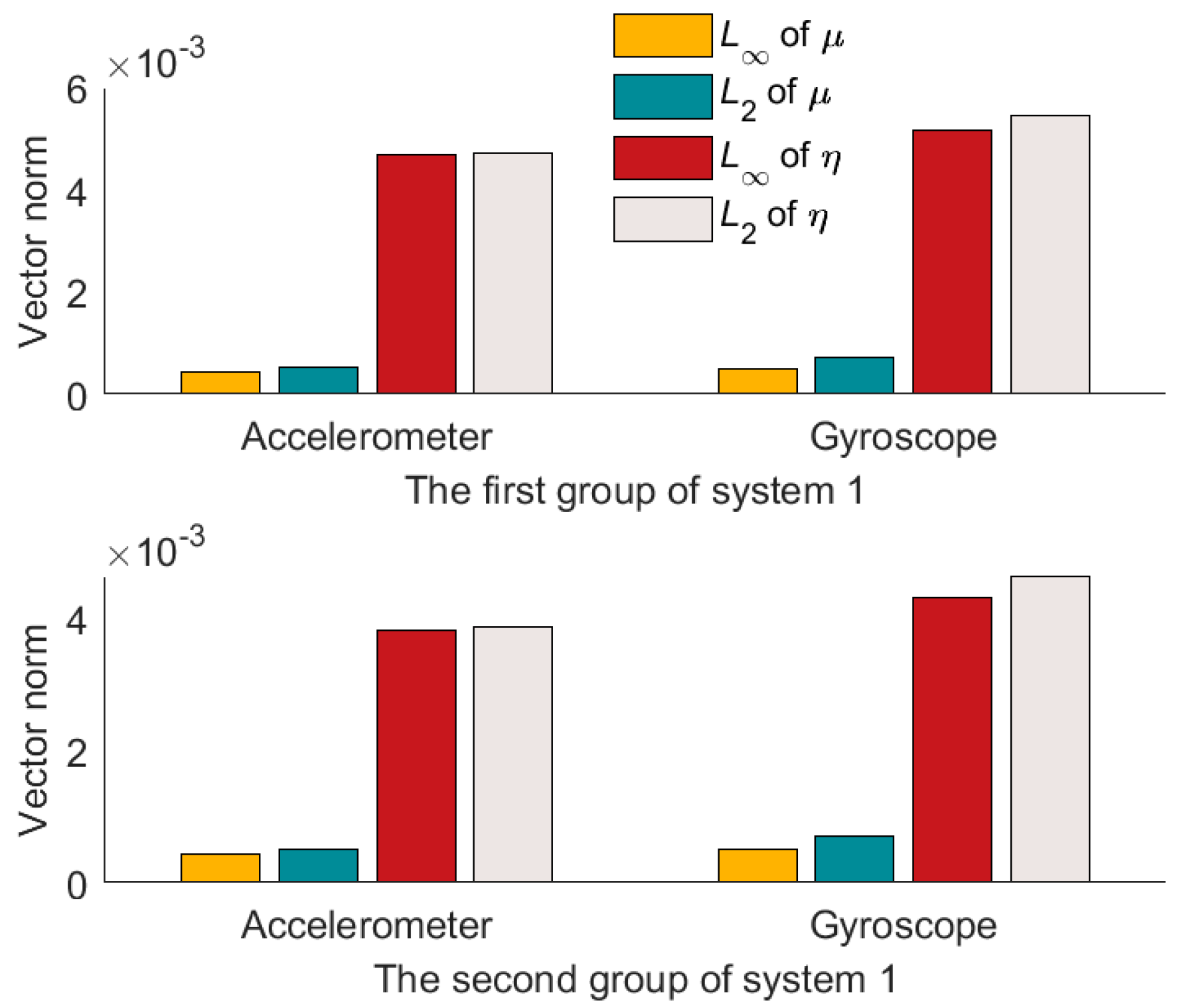
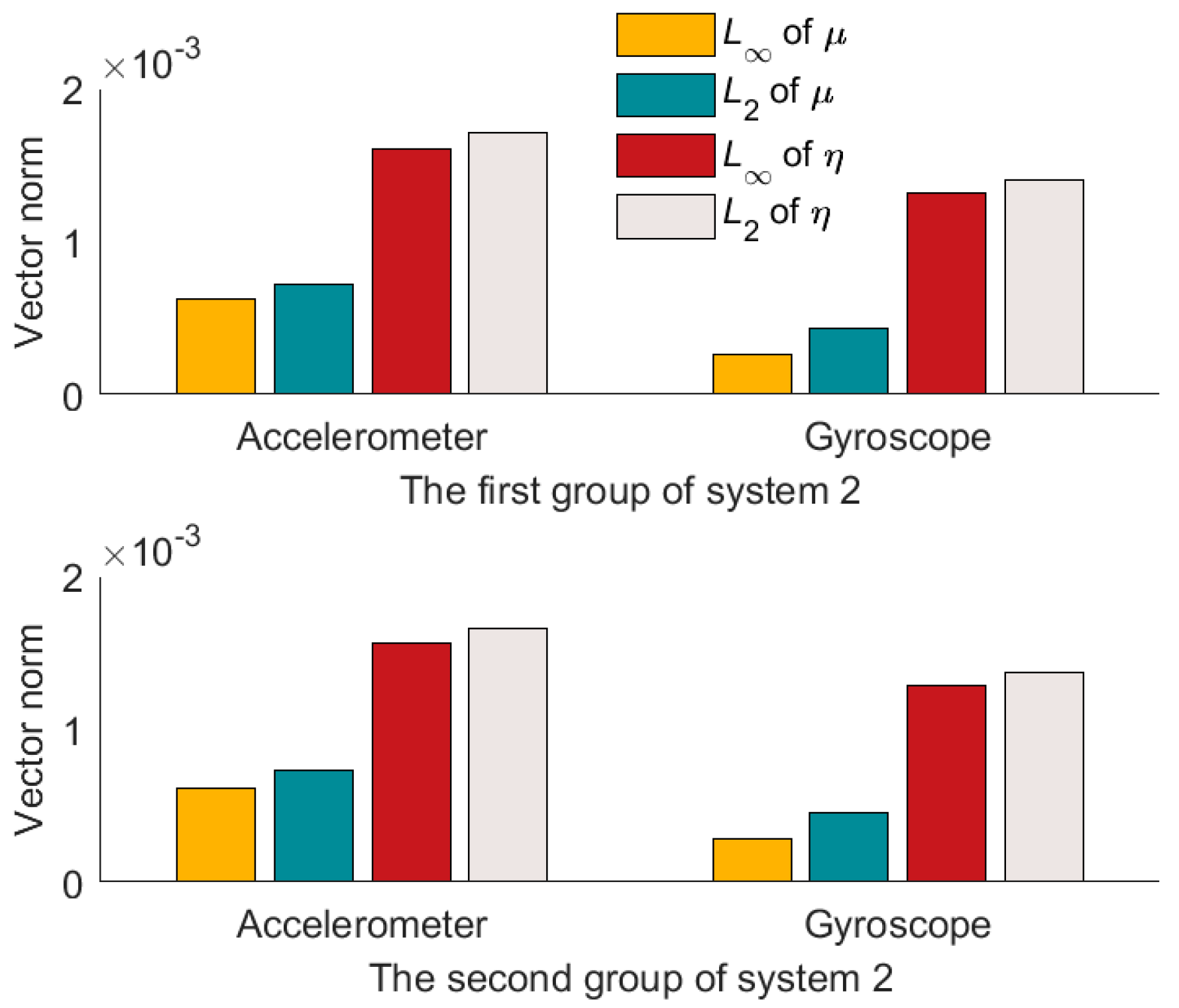
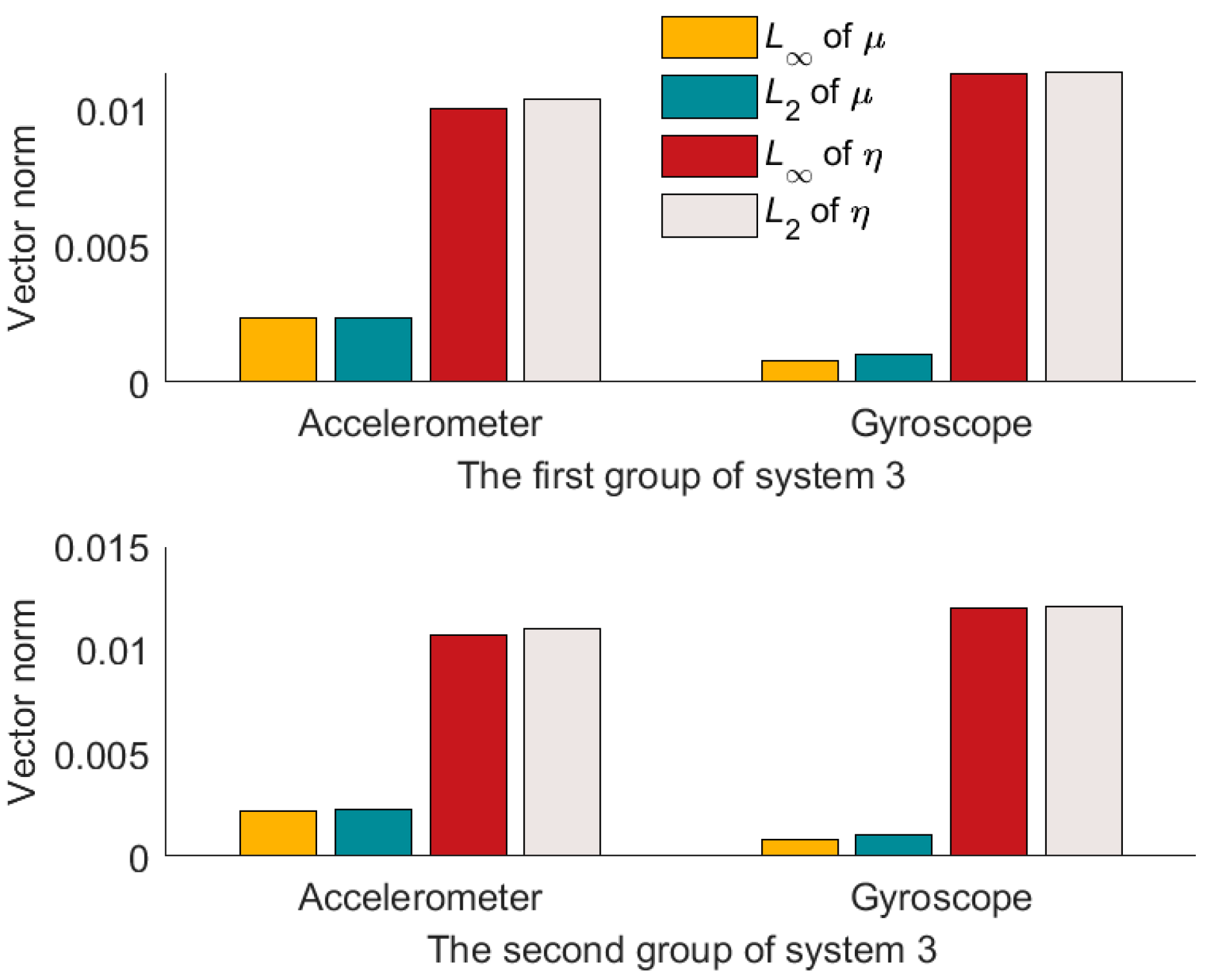
This paper introduces the polar decomposition [
25] to decompose the IMU installation error matrix. Through a series of matrix decompositions and equivalent transformations, the mathematical calibration model is established. The installation error is decomposed into a nonorthogonal error and a misalignment error. The installation error matrix is finally decomposed into a symmetric matrix and an oblique symmetric matrix. In order to further analyze the results after decomposition, three sets of IMU are calibrated by a three-axis inertial-test turntable. We analyze the nonorthogonal and misalignment errors by introducing infinite norm and two-norm. The analysis results show that the misalignment error is larger than the nonorthogonal error. This result is helpful to improve the production and assembly of IMU. For the SINS in which the misalignment error is larger than the nonorthogonal error, a new simplified model of installation error is proposed. This simplified model is verified by 48 h navigation experiments. The navigation accuracy of the proposed model is better than the traditional simplified model in attitude, velocity, and position.
The paper is organized as follows.
Section 2 is an installation error analysis and modeling. In
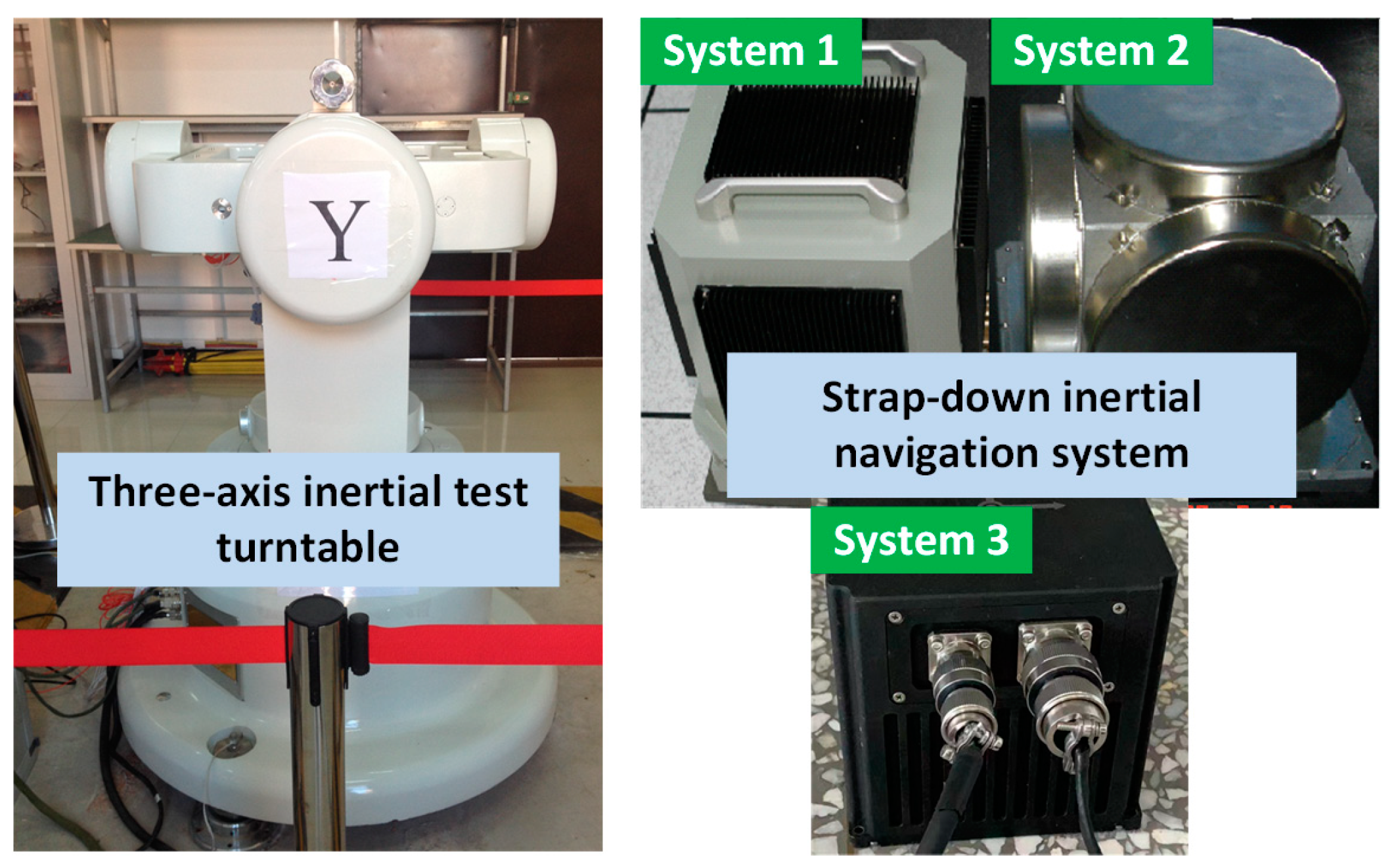
Section 3, polar decomposition is introduced to decompose the installation error matrix. The installation error model, based on polar decomposition, is obtained. This method is also shown in geometric space. In
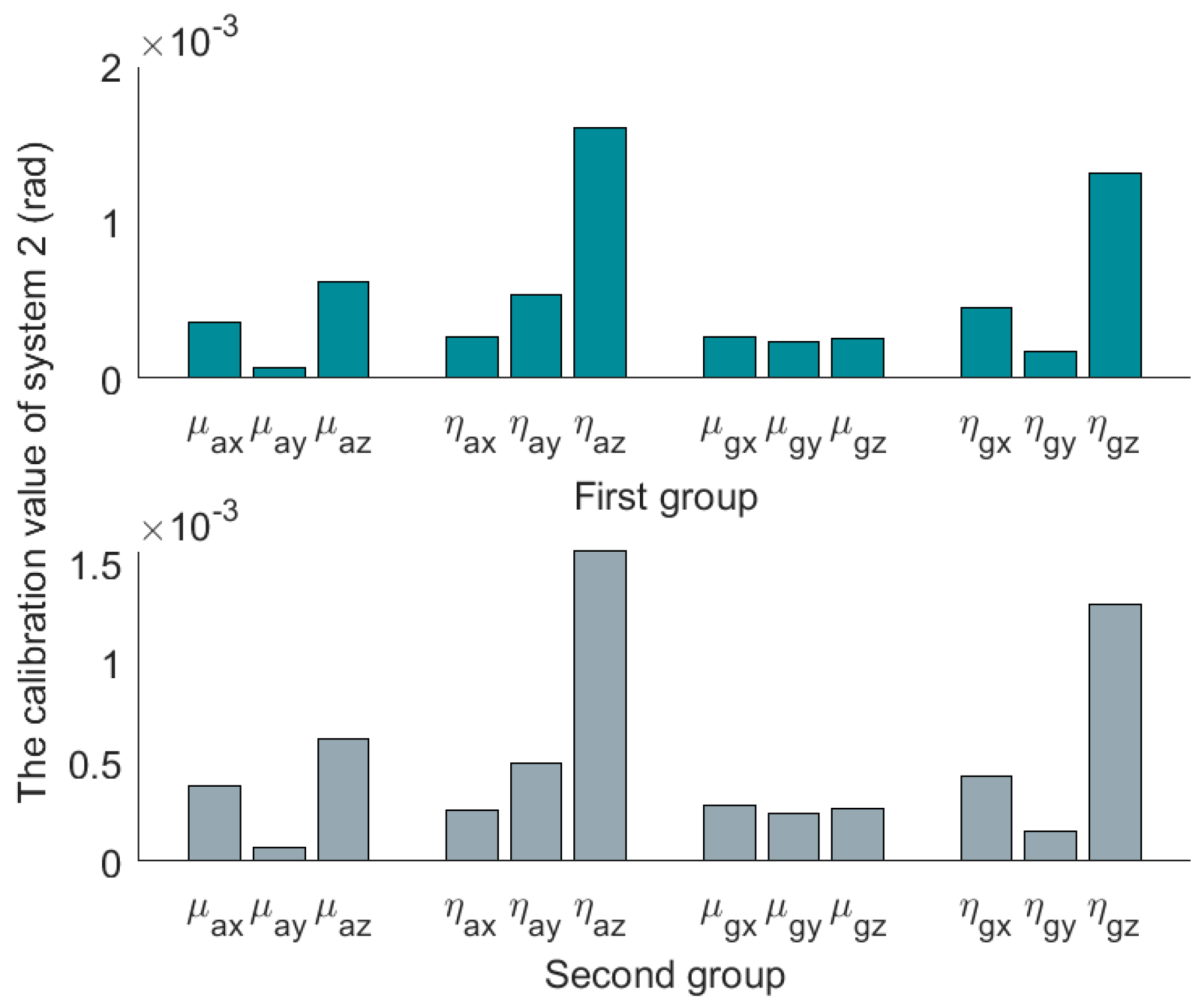
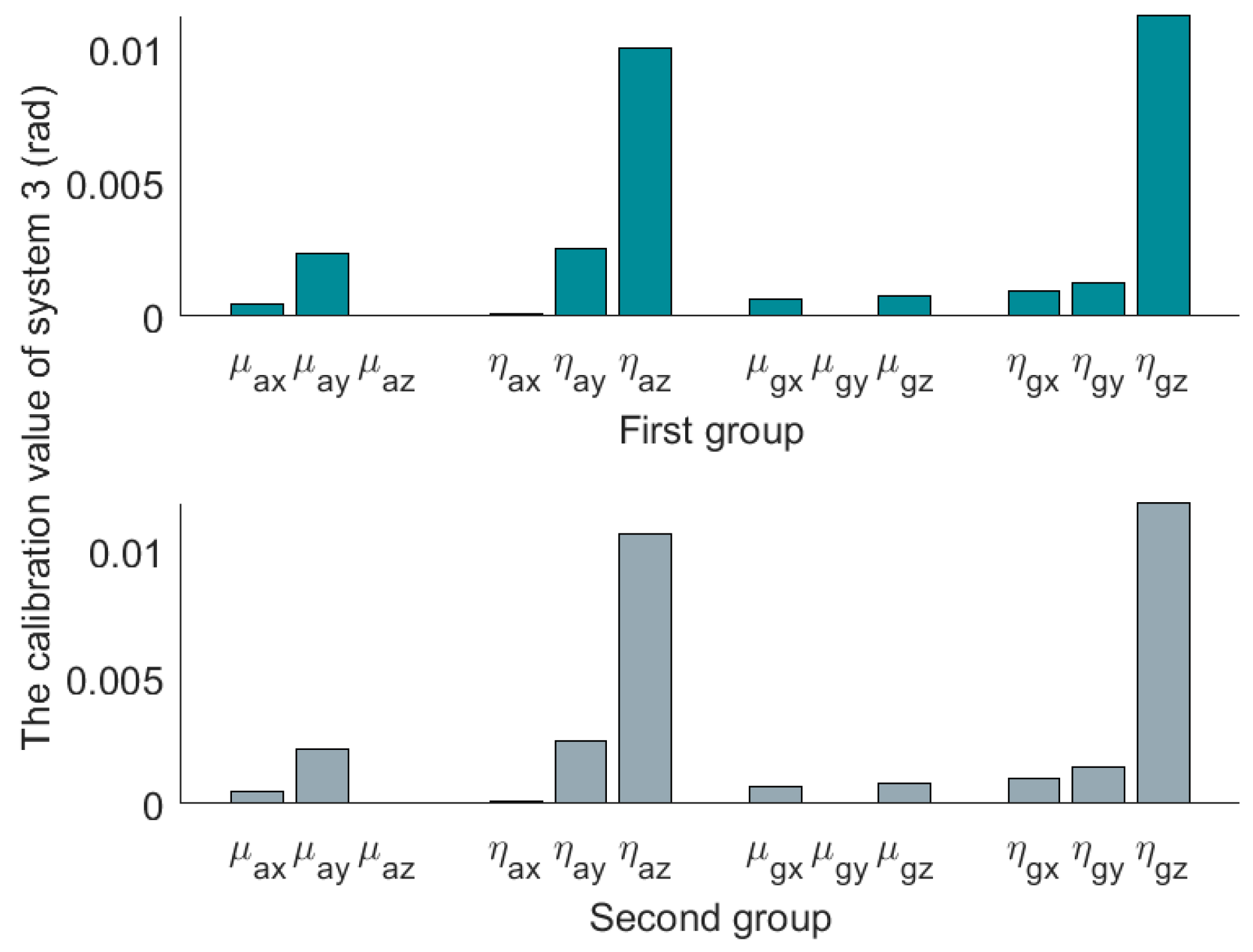
Section 4, three sets of IMU are calibrated by a three-axis inertial test turntable. The characteristics of the nonorthogonal error and the misalignment error are analyzed.
Section 5 presents a new simplified model of the installation error. The proposed simplified model and the traditional simplified model are compared in navigation simulation experiments.
Section 6 is the conclusion.
2. Installation Error Model of the IMU
The frames used in this paper are provided in
Table 1.
Installation error matrix is a 3 × 3 matrix describing the accelerometer frame (or the gyroscope frame) to the body frame. It is the mathematical representation of the installation error. The accelerometer frame (
-frame) and the gyroscope frame (
-frame) coincide with the body frame (
-frame) in ideal condition. However, there are deviations in the actual installation. In the actual installation, the
-frame or
-frame deviates from the
-frame [
26]. Suppose the origins of the
-frame,
-frame, and
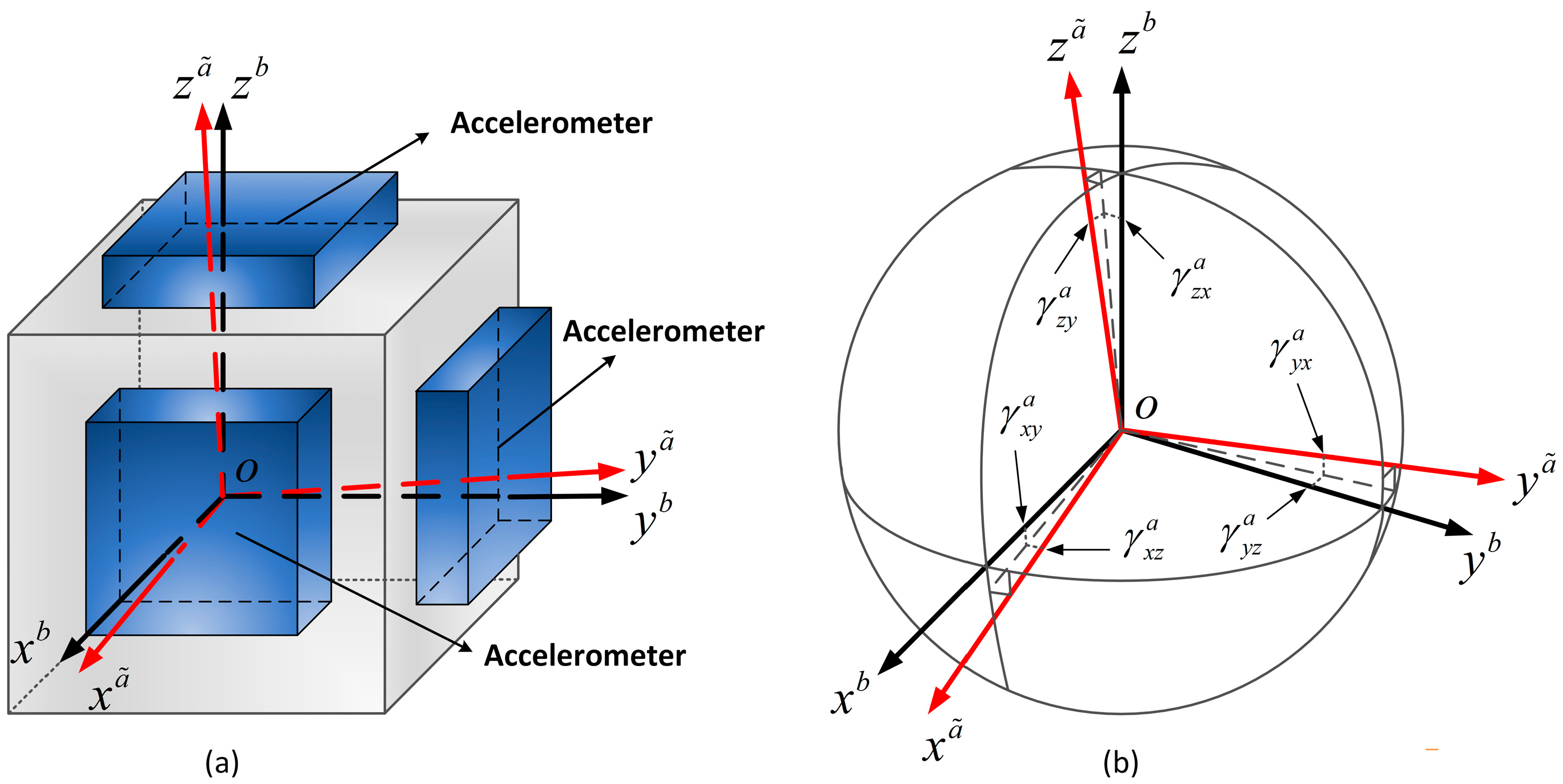
-frame are coincident. Take the acceleration installation error modeling for an example. The actual installation of accelerometers is shown in
Figure 1.
Figure 1 shows the actual installation frame of the accelerometer assembly. The three sensitive axes of the
-frame are not orthogonal. The three axes of the
-frame are orthogonal and
denotes installation error. The projections of the accelerometer measurements on the three axes of the
-frame are shown in
Table 2.
Table 2 shows the output of the accelerometer.
is the projection from the
-axis of the
-frame to the
-axis of the
-frame.
is the installation error of the accelerometer assembly. The specific force of the accelerometer assembly in the
-frame can be transformed into a specific force in the
-frame.
where
represents the transformation matrix from the
-frame to the
-frame.
where
is a small angle,
, and
. The accelerometer transformation matrix
can be written as:
The transformation relationship between
-frame and
-frame is
There is no installation error in the ideal condition. So, the
-frame and the
-frame are coincident. The transformation relationship is written as:
The transformation matrix
is a unit matrix (
). Equation (4) can also be rewritten as:
is the installation error matrix. It can be written as:
Combine (5) and (6) together.
is written as:
where
represents the transformation matrix from the
-frame to the
-frame.
represents the transformation matrix from the
-frame to the
-frame.
represents the installation error matrix.
Similarly, the derivation process of the gyroscope installation error model is the same as the accelerometer installation error model. Therefore, they have the same expression.
The transformation matrixes
and
are as follows:
3. Polar Decomposition of Installation Error Matrix
In
Section 2, the installation error is modeled for the accelerometer and gyroscope. The transformation matrix
(
represents the transformation matrix from the
-frame or the
-frame to the
-frame.) and the installation error matrix
(
represents the installation error matrix of the accelerometer or gyroscope.) are derived.
is a direct transformation. In order to express this transformation more clearly, the polar decomposition method is introduced to divide the transformation into two steps. In this way, the compensation for the installation error also needs two steps.
The installation error is minimal. The rank of
is three.
is nonsingular, so it can perform singular value decomposition. According to singular value decomposition theory [
27,
28],
can be decomposed as:
where
represents the left singular matrix and
represents the right singular matrix.
and
are orthogonal matrixes. In
Figure 1, the basis of the
-frame is a standard orthogonal basis.
and
are unit orthogonal matrixes.
is a unit orthogonal matrix. Therefore,
. Substitute
into (11), and introduce the polar decomposition method [
25]. Then
Define
and
. Equation (11) can be written as:
where the
-frame is a rectangular Cartesian coordinate system.
According to (13), can be decomposed into and by polar decomposition. represents the transformation matrix from -frame (or -frame) to a rectangular cartesian coordinate system. represents the transformation matrix from the -frame to the -frame.
The transposition of
is
From the derivation of (14), it can be seen that
is a symmetric matrix. The symmetric matrix
represents the nonorthogonal properties of IMU. Suppose that the three nonorthogonal angles are
,
, and
.
The column vector of
is a unit vector.
can be written as:
where
,
, and
are all small angles, and the high-order infinitesimal can be ignored. Thus,
can be written as:
where
is a symmetric matrix composed of three nonorthogonal angles.
is the transformation matrix from the
-frame to the
-frame. The orthogonal small-angle transformation matrix is a skew-symmetric matrix. Therefore,
is a skew-symmetric matrix [
29,
30]. The three misalignment angles between the
-frame and the
-frame are
,
, and
.
The three misalignment angles are all small angles, and the high-order infinitesimal can be ignored. Thus,
is written as:
where
.
Through the above derivation, according to polar decomposition, the installation error matrix is divided into the product of two matrices. The frame is transformed twice. Substitute the transformation matrixes into (13) and ignore the small quantities of the second order and above the second order.
Thus,
can be written as:
In some references [
31,
32,
33], the matrix is directly decomposed into the sum of the symmetric matrix and skewed the symmetric matrix. In [
29], the matrix is directly decomposed into the product of the symmetric matrix and the skew-symmetric matrix. The above derivation process also proves that this modeling method is feasible. In summary, the installation error matrix is decomposed into the product of two matrices by polar decomposition. The modeling in the geometric space requires two steps. The first step is to orthogonalize the nonorthogonal frame. The second step is to compensate for the misalignment of angles.
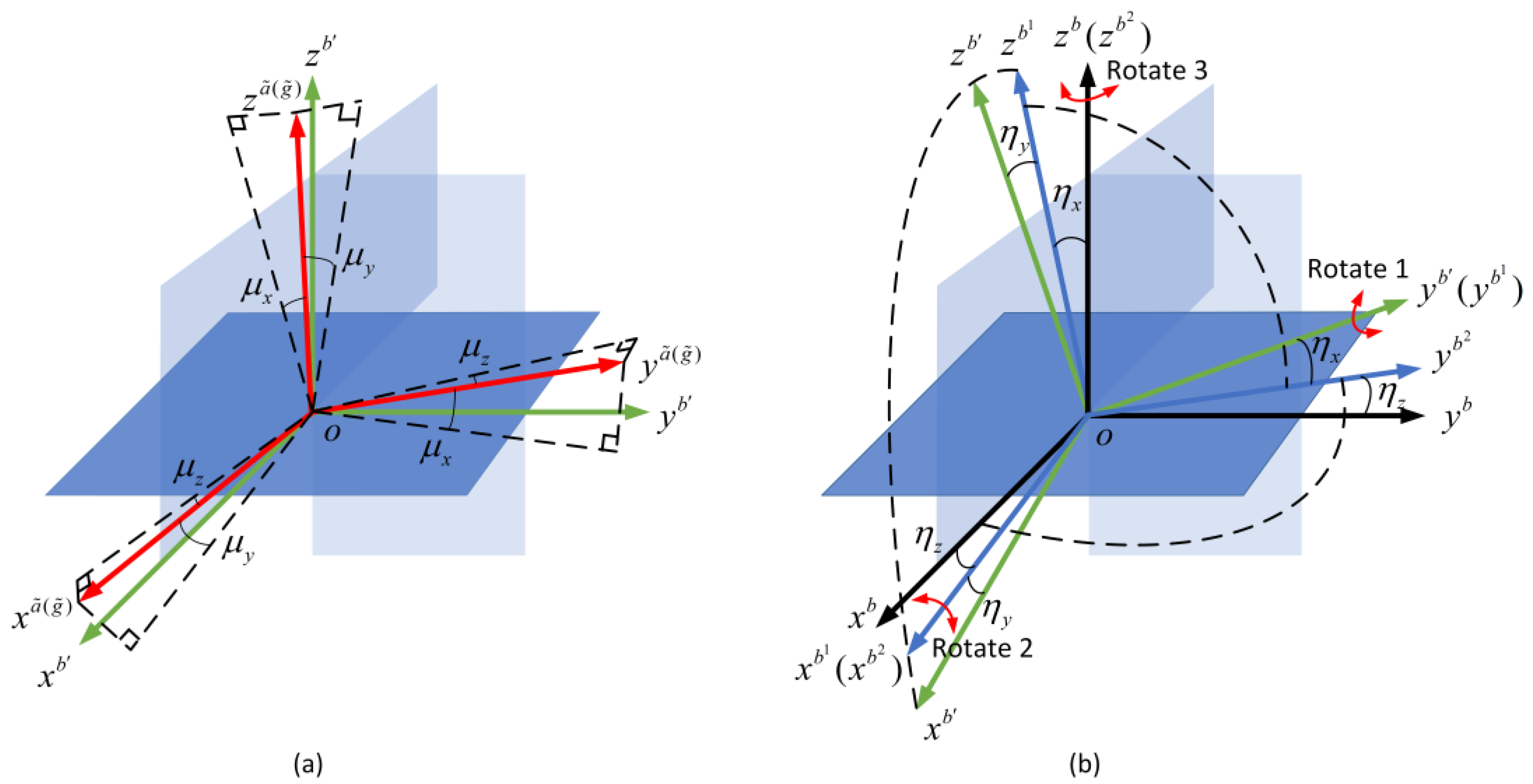
In geometric space decomposing the installation error matrix by polar decomposition carries out two steps. The first step is the orthogonalization of the nonorthogonal coordinate system. It is shown in
Figure 2a.
A nonorthogonal coordinate system is
, and
is an orthogonal coordinate system. The essence of orthogonalization is to transform the nonorthogonal coordinate system into the orthogonal coordinate system. In
Figure 2a, it transforms
into
. The
-frame is an orthogonal coordinate system. There are misalignment angles between the
-frame and the
-frame. The misalignment relationship can be compensated by the transformation of the orthogonal small-angle transform [
29,
30]. The principle of orthogonal small-angle transform is shown in
Figure 2b. In
Figure 2b, the
-frame needs to rotate three times. The three rotations correspond to rotate one, rotate two, and rotate those. In this way, the orthogonalization and alignment of the IMU are completed. The IMU-frame and the
-frame are coincident.
is decomposed to a left singular matrix, right singular matrix, and singular value matrix by polar decomposition. After a series of matrix transformations, the final decomposition is the product of two matrices. This method of decomposing into the product of two matrices actually divides the installation error into two types. One type of installation error is a nonorthogonal error. It describes the three axes of the accelerometer (or gyroscope) assembly that are nonorthogonal. It cannot form a three-dimensional Cartesian coordinate system when the accelerometers are installed. Another type of installation error is a misalignment error. The -frame is a fixed Cartesian coordinate system. Therefore, even -frame or -frame is an orthogonal installation, there may be misalignment errors relative to -frame. This method decomposes the direct transformation into two steps in geometric space. The first step is the orthogonalization of the nonorthogonal coordinate system. The second step is to solve the problem of misalignment.
5. Static Navigation Experiment and Result Analysis
In order to save time and cost, the calibration model of the SINS is often simplified. In the traditional simplified models, the installation error matrix is often simplified as an upper triangular or lower triangular matrix. This will affect the navigation accuracy of SINS.
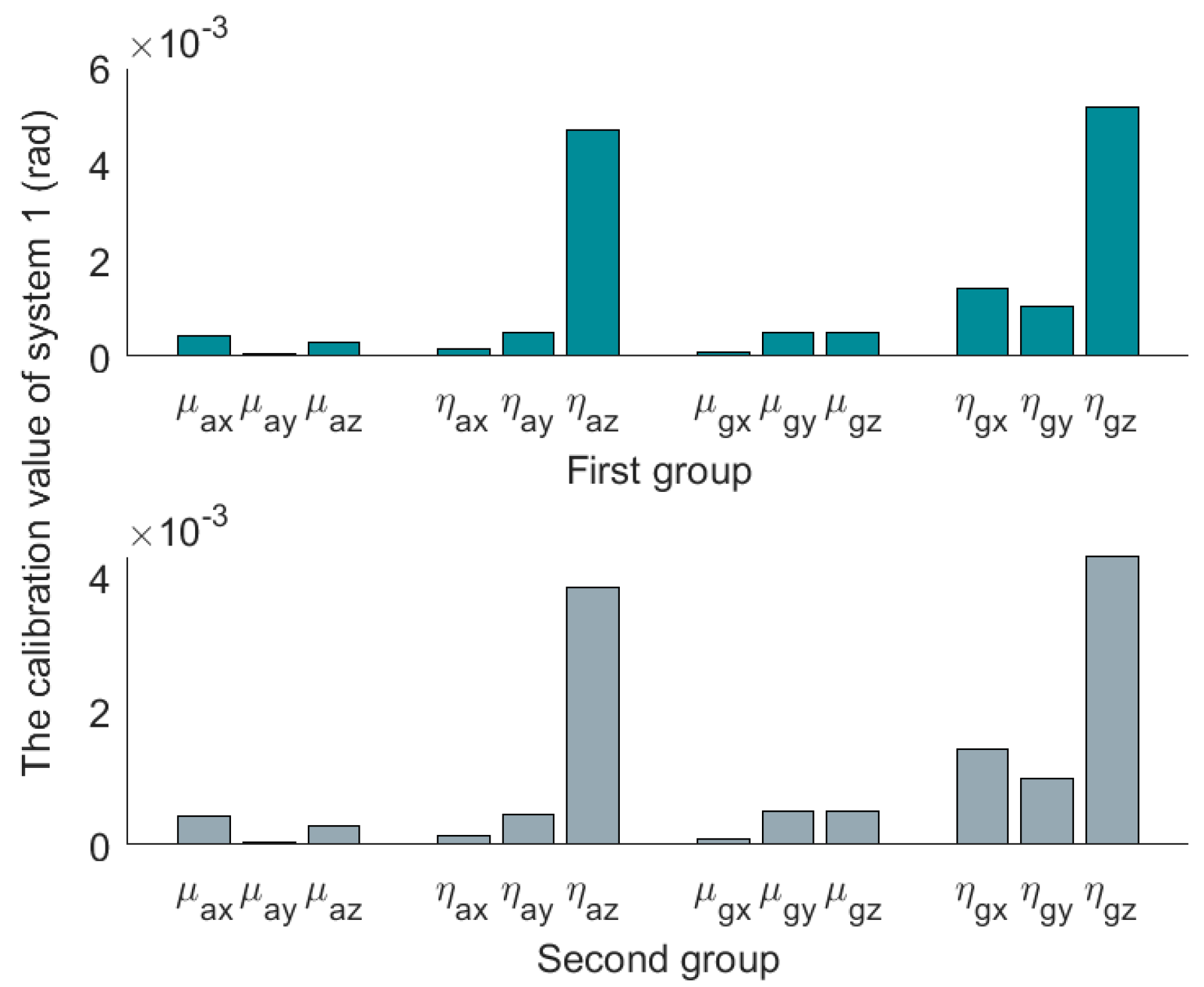
Through the analyses of installation error angles in
Section 4, it is found that the misalignment error angles are greater than the nonorthogonal error angles in the three systems. Can we simplify the installation error matrix into an antisymmetric matrix composed of three misalignment angles? If so, is it better than the traditional simplified models? The paper will discuss and analyze the 48-h navigation experiments to verify these questions.
The simplified installation error model of the traditional lower triangular matrix [
14,
15,
16,
17,
18] is:
The simplified installation error model composed of the three misalignment angles is:
where
is the installation error matrix of the accelerometer assembly (or gyroscope assembly).
,
, and
are misalignment angles.
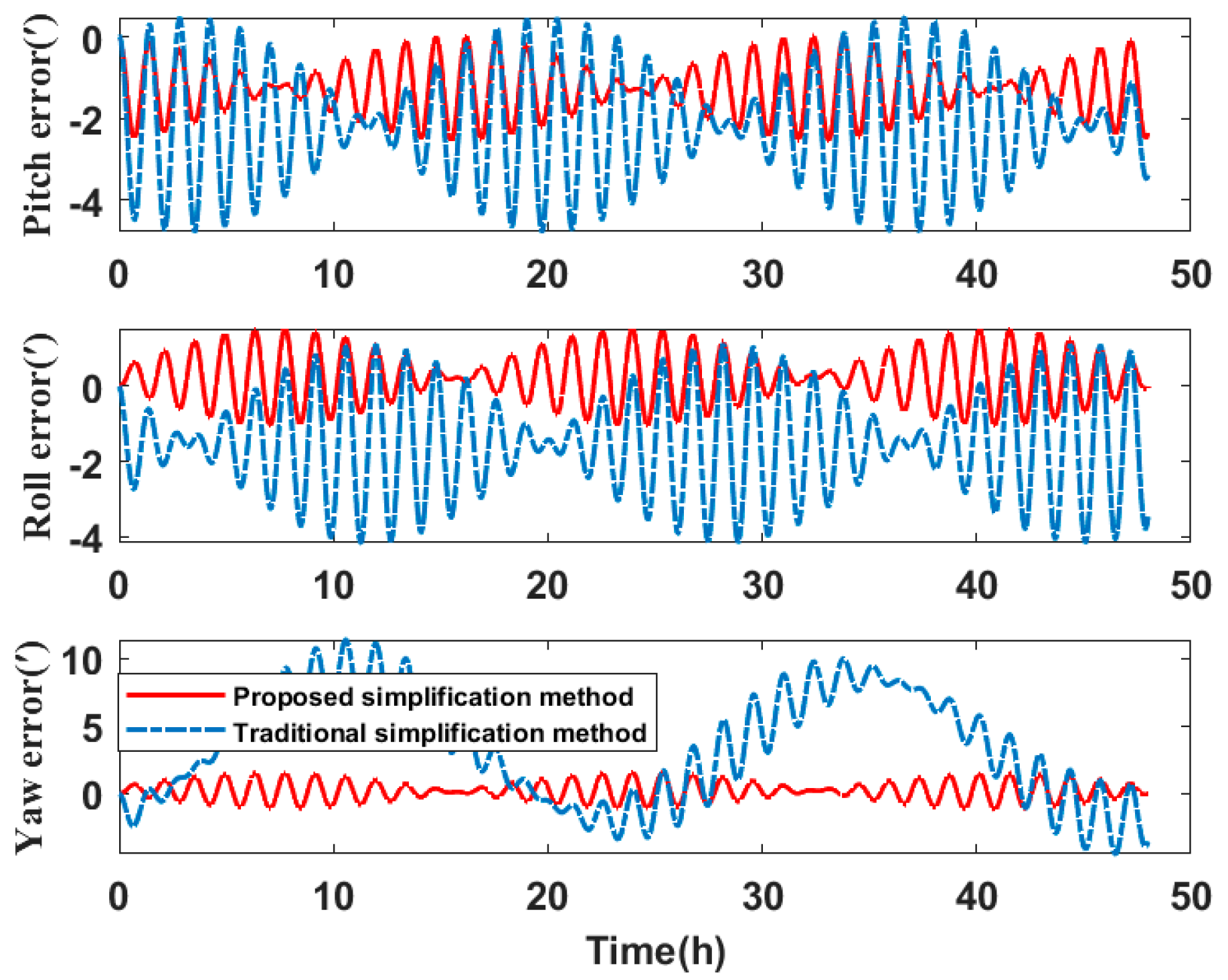
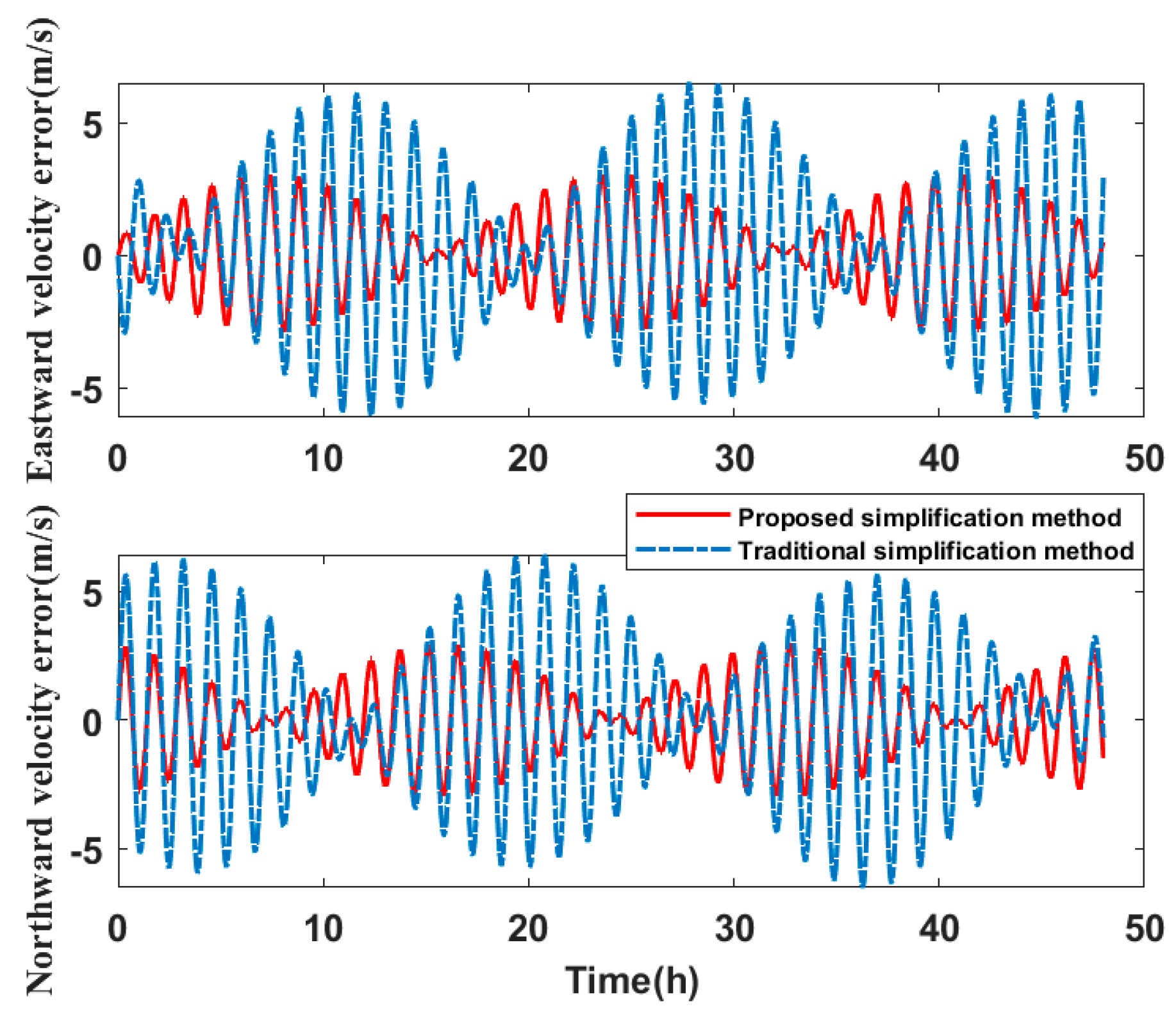
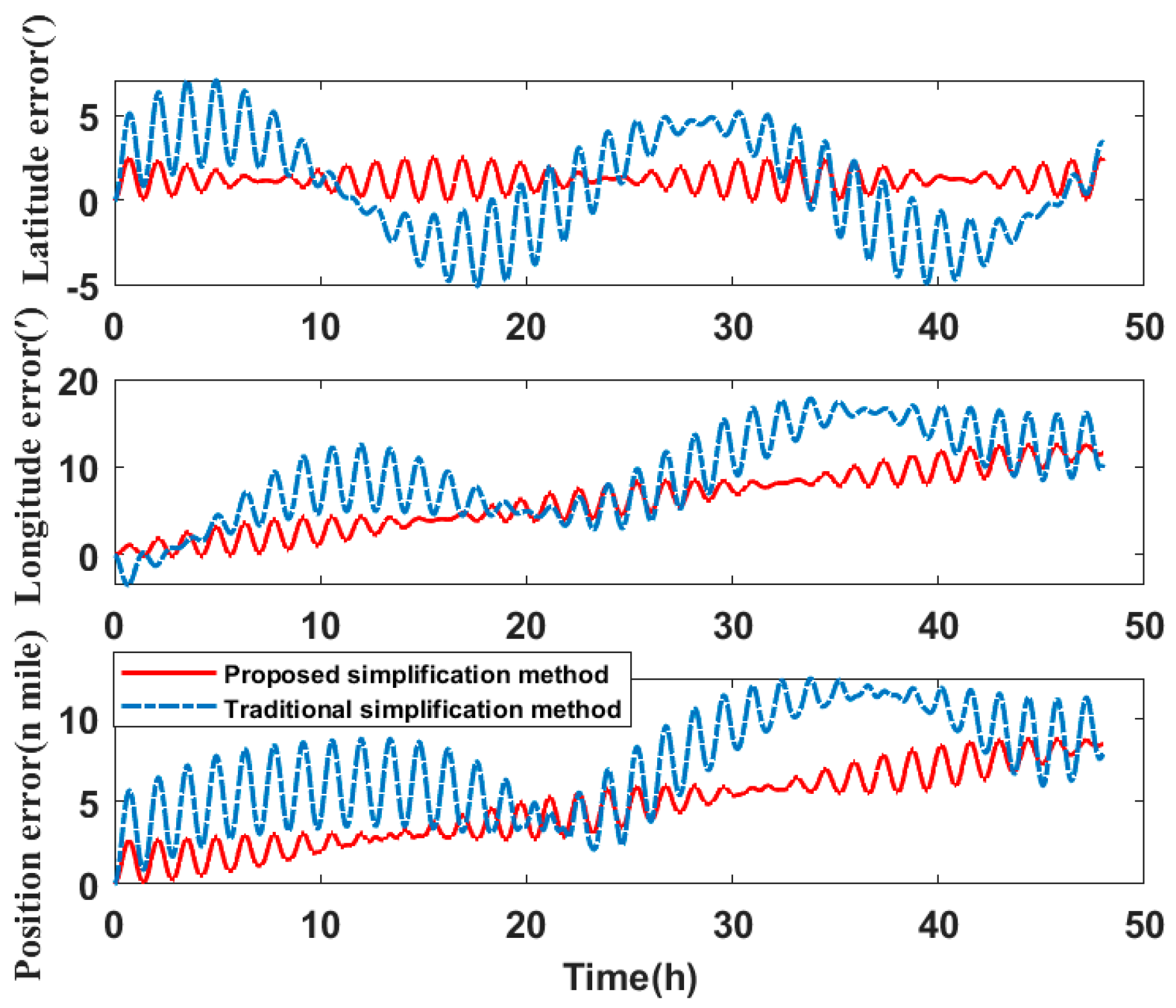
In comparing the simplified model of the three misalignment angles with the traditional simplified model of the lower triangular matrix, the experiments analyze the navigation errors caused by the installation errors. Ignore the influence of the other errors on SINS. Navigation simulation experiments are carried out for the three systems. The experimental results are shown in
Table 6. We take system two as an example to show the navigation errors caused by the simplified models. The navigation results are shown in
Figure 10,
Figure 11 and
Figure 12.
Compared to the navigation results of the systems in
Table 6, the errors of the simplified model proposed in this paper are smaller than the error caused by the traditional simplified model in attitude, velocity, and position. The attitude accuracy of the systems is increased by 37.48–86.20%, the velocity accuracy is increased by 51.79–55.56%, and the position accuracy is increased by 21.94–76.37%.
Therefore, it can be concluded that if the misalignment angles of the SINS are larger than the nonorthogonal angles after singular value decomposition, the navigation errors caused by the simplified model proposed in this paper are less than the navigation errors caused by the traditional simplified model. The navigation errors of system three are the largest of the three systems. By analyzing the error calibration results in
Table 3, the installation errors of system three are also much larger than that of system one and system two. The simplified calibration model causes large navigation errors. This directly shows that when the SINS installation error is large, the simplified model will also cause large navigation errors.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}