
An Ultrasonic Target Detection System Based on Piezoelectric Micromachined Ultrasonic Transducers
Abstract
:1. Introduction
2. Theory and Methods
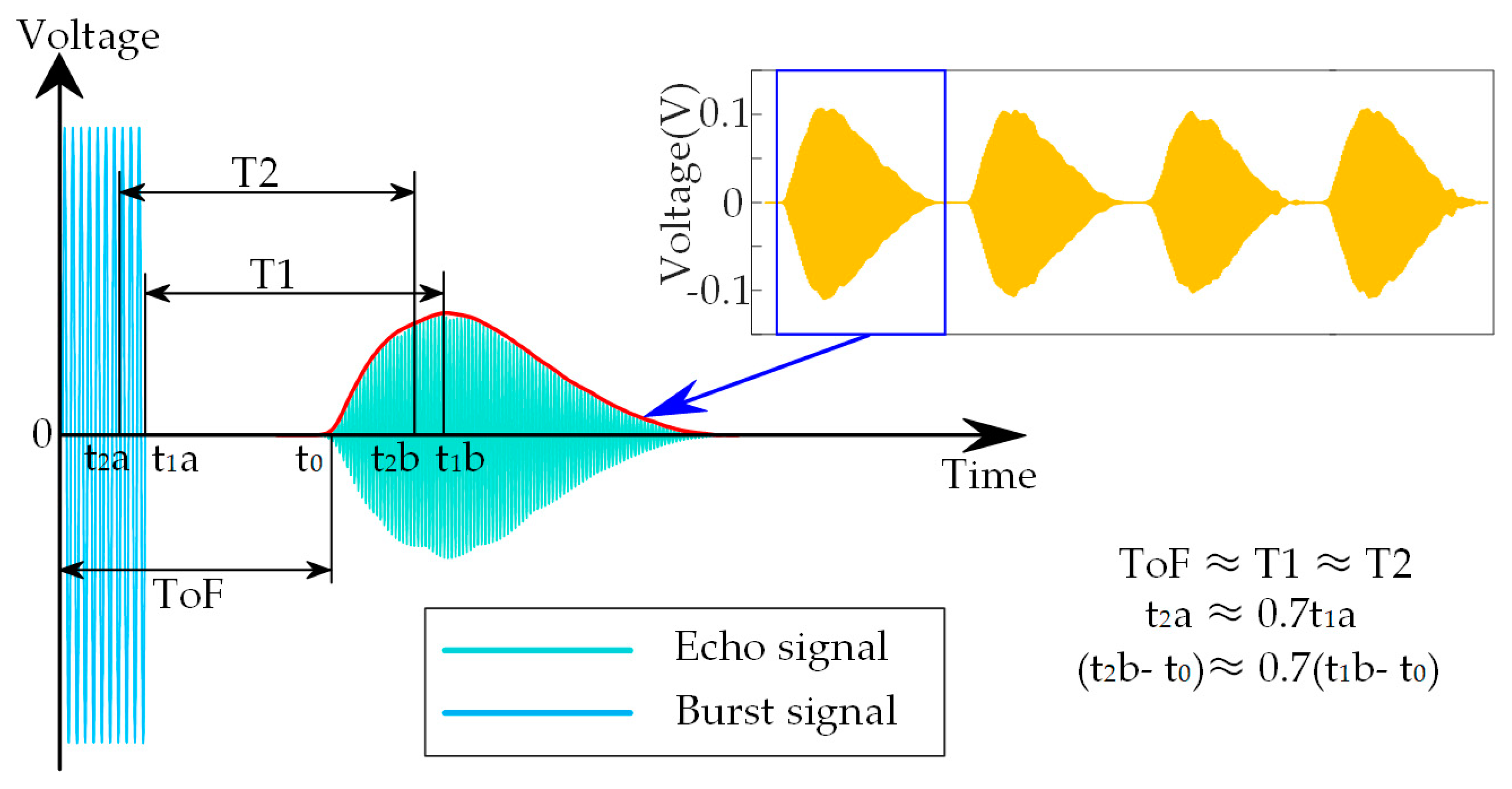
2.1. The Method of Time of Flight
2.2. Reflectivity and Transmittance
3. System Design
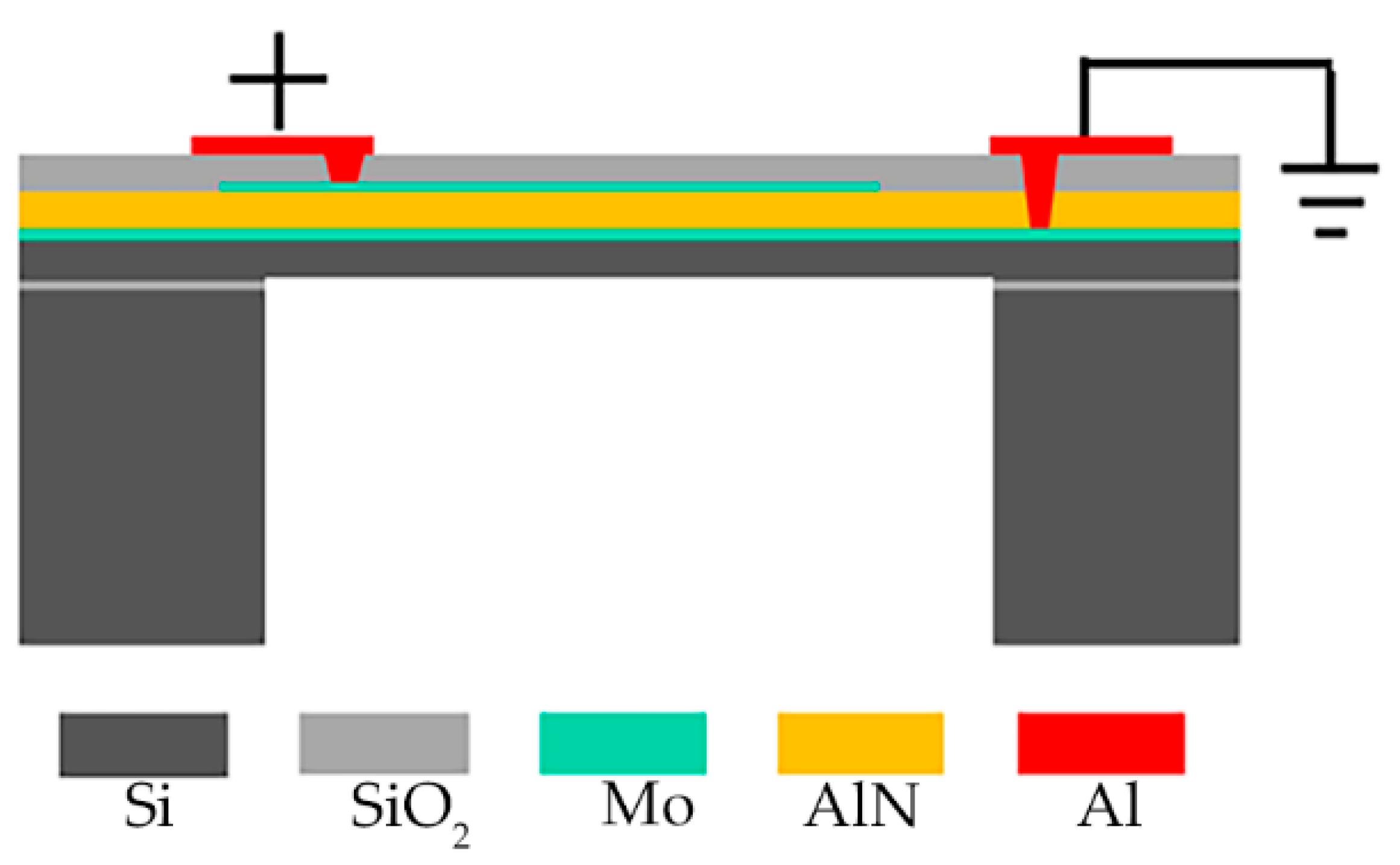
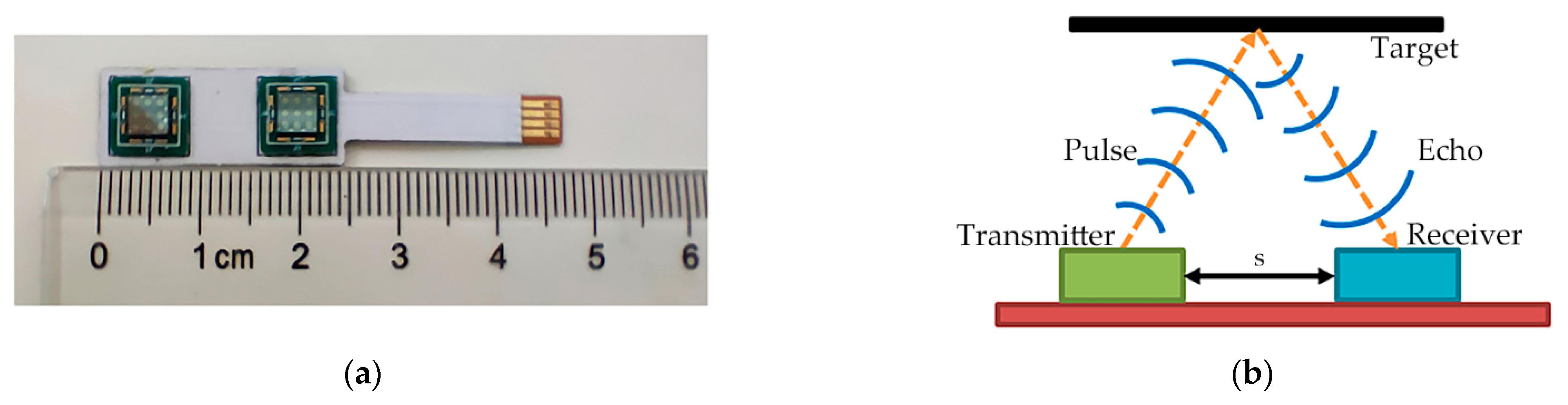
3.1. Structure of the Ultrasonic Sensor Based on PMUTs
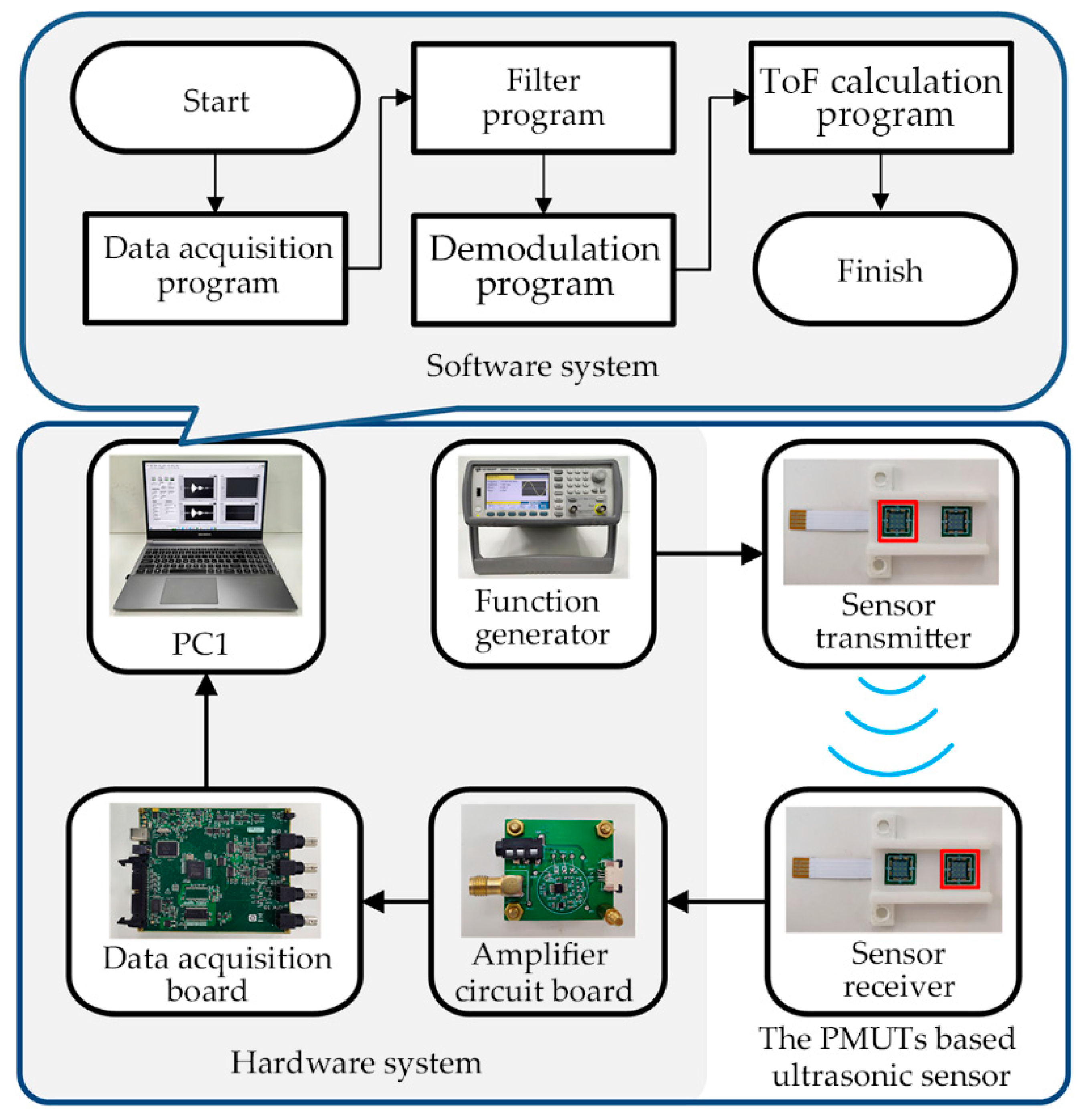
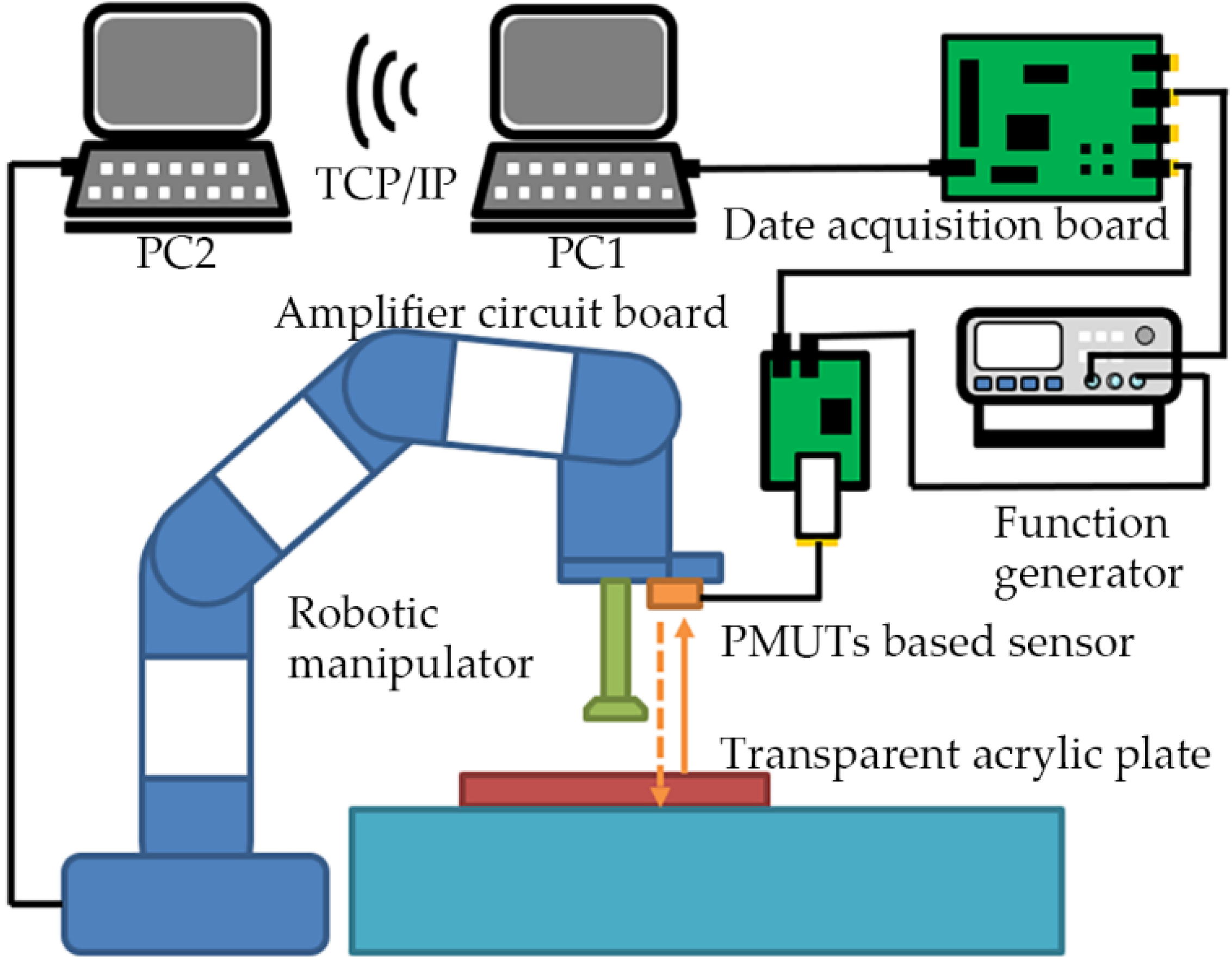
3.2. Design of the Sensor System
| Algorithm 1: Calculate ToF from the envelope data. |
| Input: Envelope data D; Threshold h; Waveform threshold α; Sampling frequency s; Blind duration time tm; Pulse duration time tj; Output: Time of Flight ToF; 1: Find peak p and peak index i in D; 2: if p > h then Ture peak P0 = p; else P0 = 0; end 3: Threshold peak P1 = αP0; 4: Calculate the absolute value A between D and P1; 5: Find the data indices B where the A is the minimum value; 6: if B < i then B0 = B; else Find the minimum value of A again in the index 0 to B; end 7: ToF = ((B0/s) + tm) − αtj; 8: return ToF; |
3.3. Interaction with The Robotic Manipulator
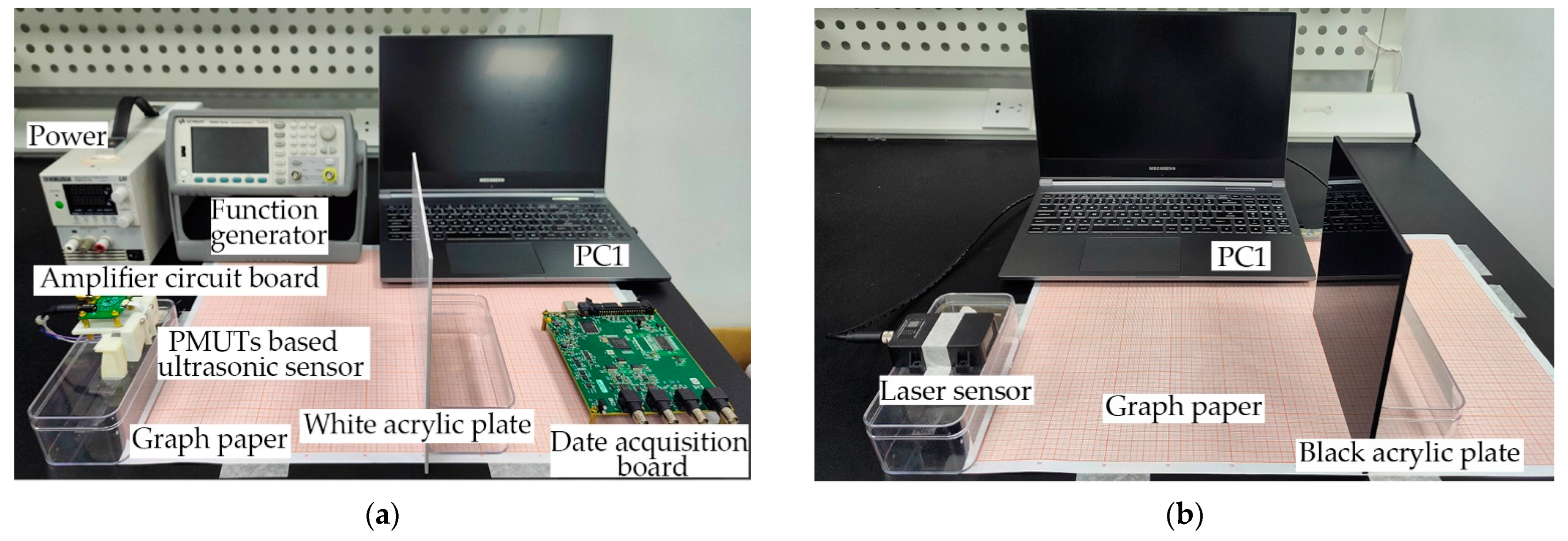
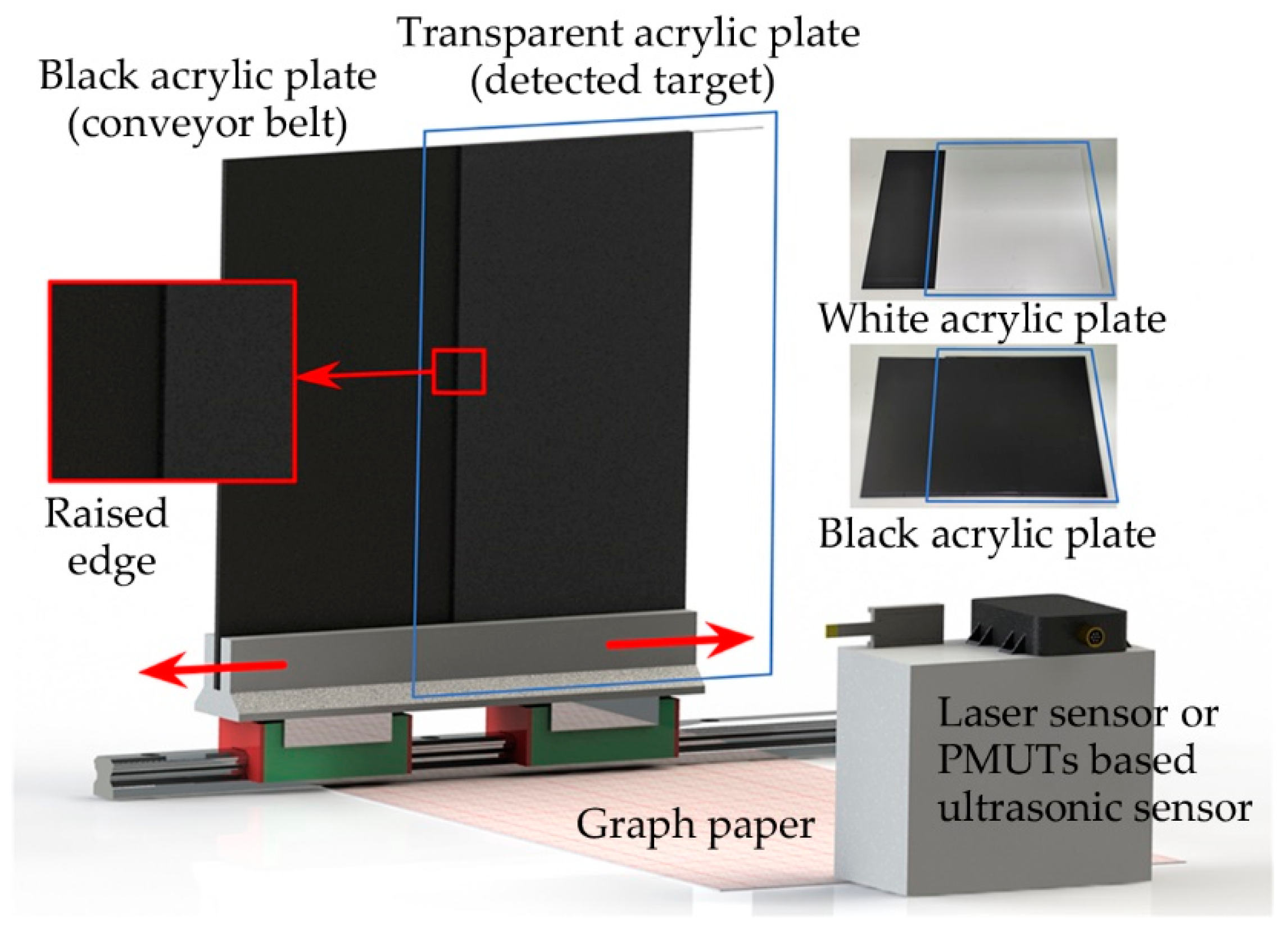
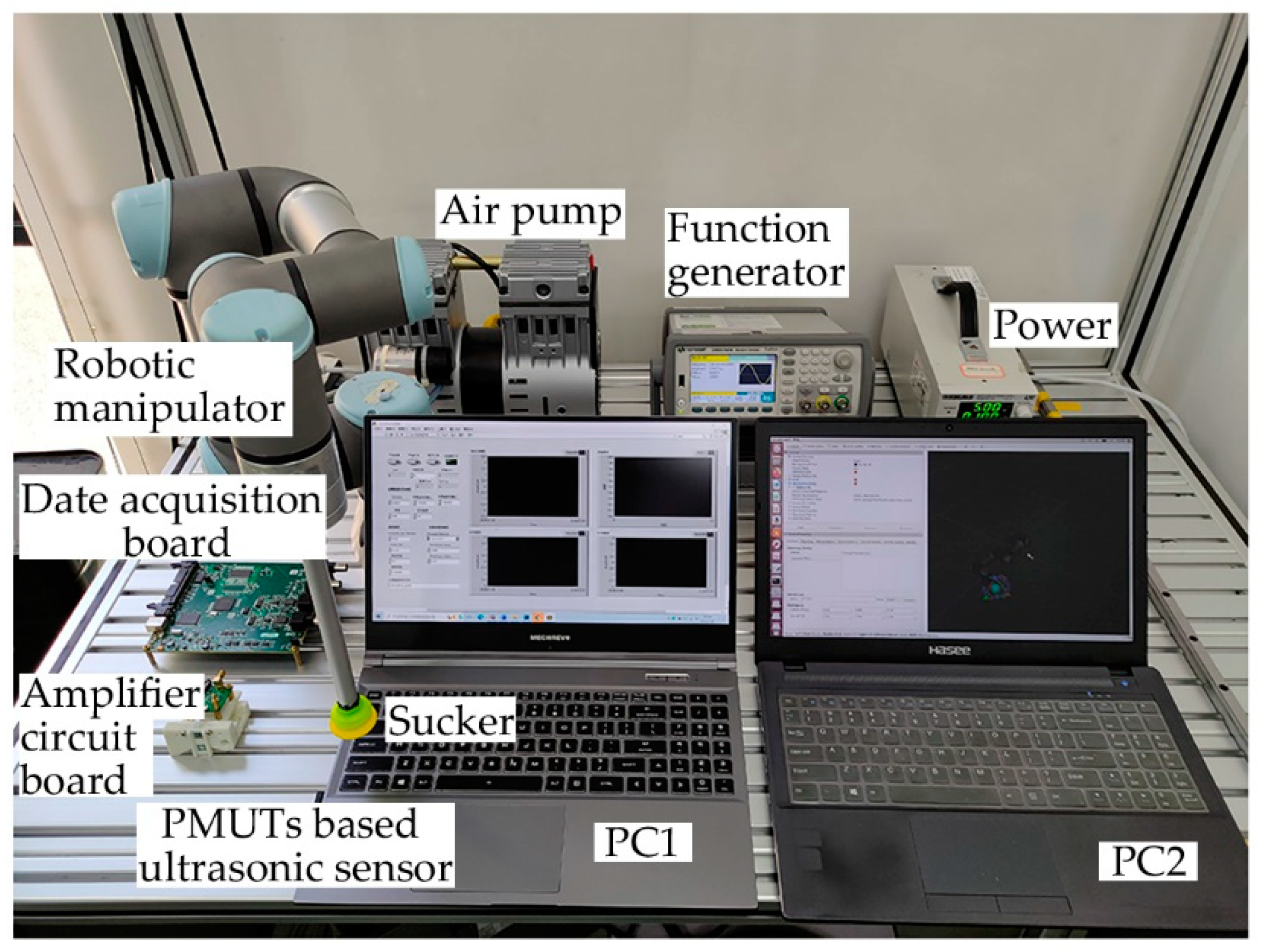
4. Experiment Setup
5. Results
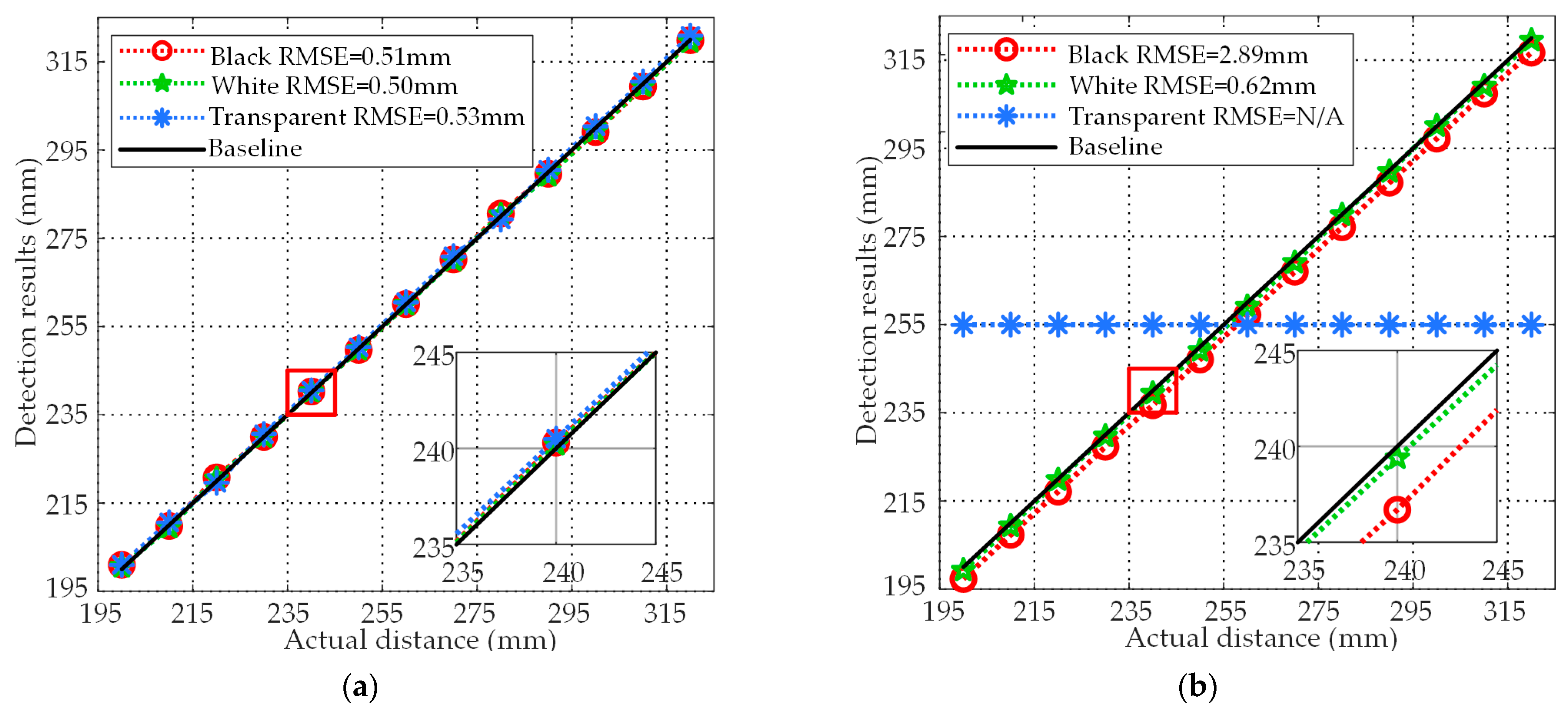
5.1. Static Experiment Results
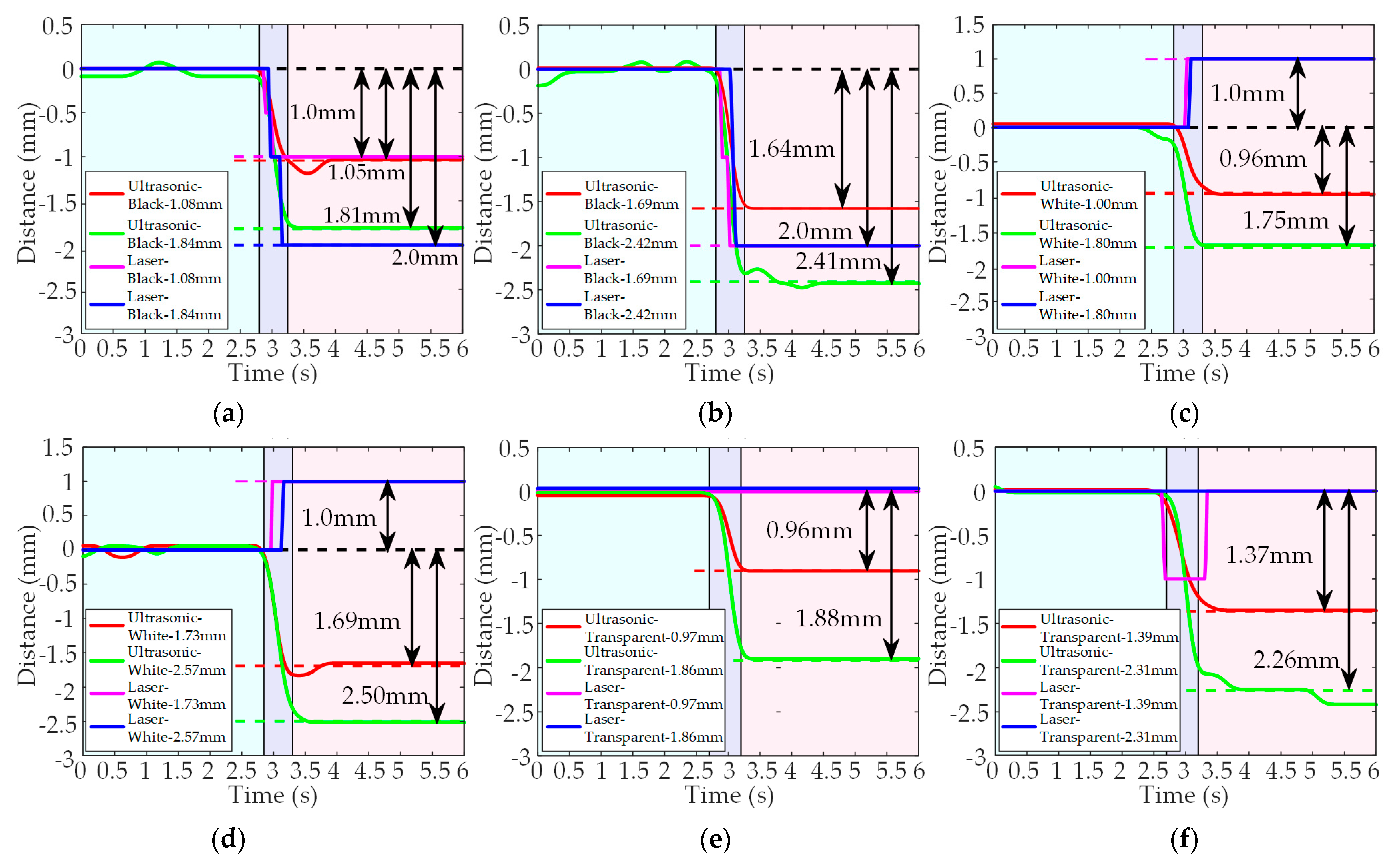
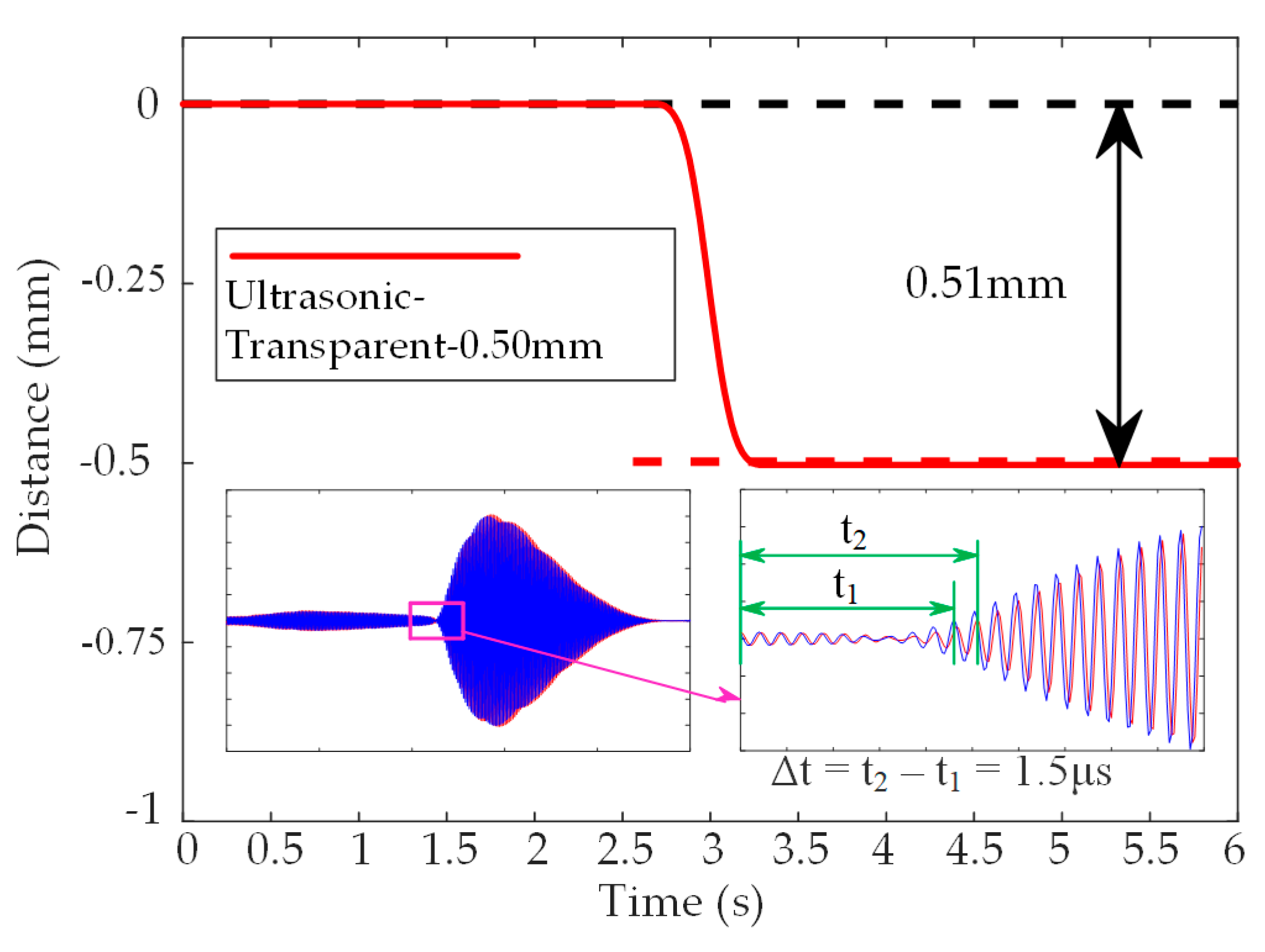
5.2. Dynamic Experiment Results
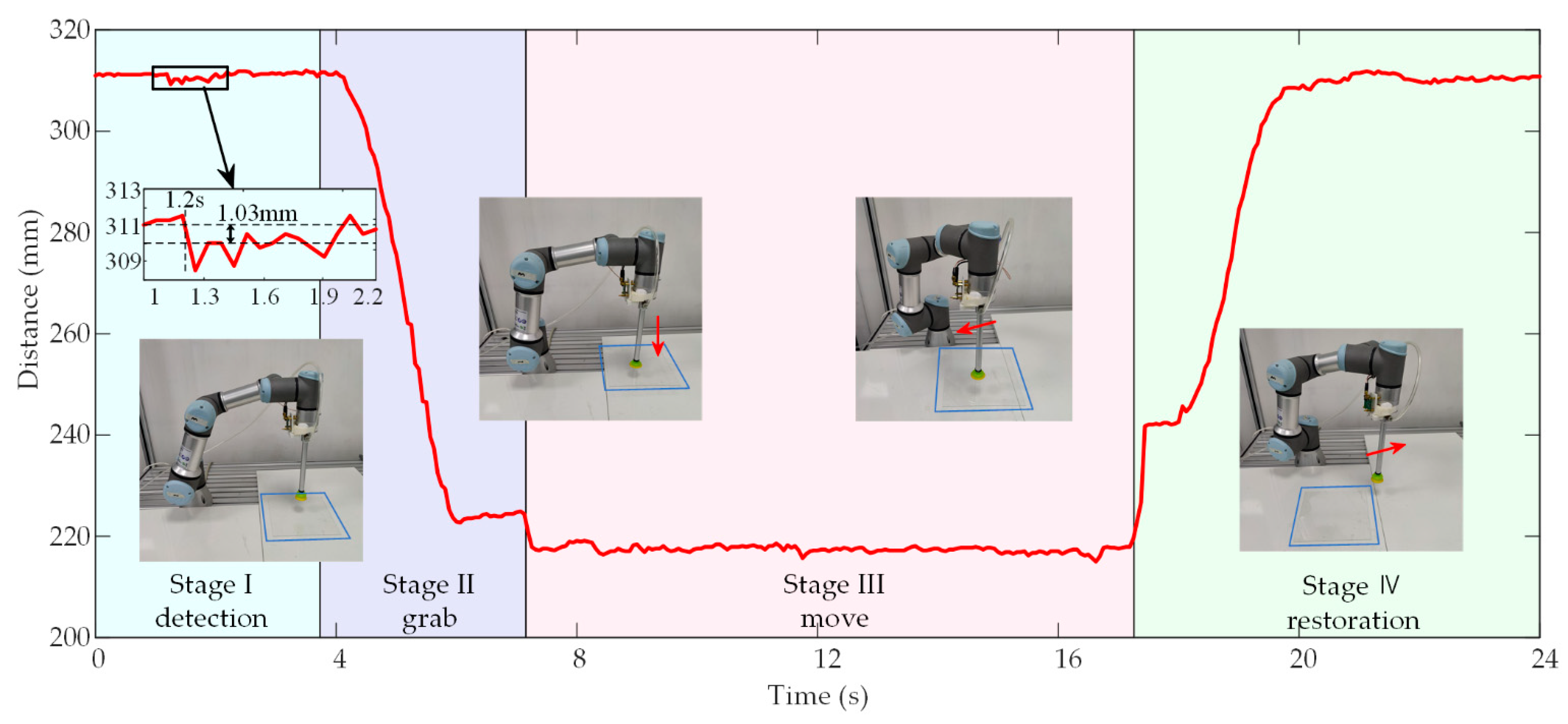
5.3. Comprehensive Experiment Results
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Jiménez, F.; Naranjo, J.E.; Gómez, O.; Anaya, J.J. Vehicle tracking for an evasive manoeuvres assistant using low-cost ultrasonic sensors. Sensors 2014, 14, 22689–22705. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rhee, J.H.; Seo, J. Low-cost curb detection and localization system using multiple ultrasonic sensors. Sensors 2019, 19, 1389. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, S.E.; Li, G.; Liu, C.; Cheng, B.; Wang, J.; Li, K. Kalman filter-based tracking of moving targets using linear ultrasonic sensor array for road vehicles. Mech. Syst. Signal Process. 2018, 98, 173–189. [Google Scholar] [CrossRef]
- Juan, C.W.; Hu, J.S. Object Localization target localization and tracking system using multiple ultrasonic sensors with newton–raphson optimization and kalman filtering techniques. Appl. Sci. 2021, 11, 11243. [Google Scholar] [CrossRef]
- De Simone, M.C.; Rivera, Z.B.; Guida, D. Obstacle avoidance system for unmanned ground vehicles by using ultrasonic sensors. Appl. Mach. 2018, 6, 18. [Google Scholar] [CrossRef] [Green Version]
- Gharajeh, M.S.; Jond, H.B. An intelligent approach for autonomous mobile robots path planning based on adaptive neuro-fuzzy inference system. Ain Shams Eng. J. 2022, 13, 101491. [Google Scholar] [CrossRef]
- Jahromi, B.S.; Tulabandhula, T.; Cetin, S. Real-time hybrid multi-sensor fusion framework for perception in autonomous vehicles. Sensors 2019, 19, 4357. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Wu, Y.; Niu, Q. Multi-sensor fusion in automated driving: A survey. IEEE Access. 2019, 8, 2847–2868. [Google Scholar] [CrossRef]
- Lou, J. Crawling robot manipulator tracking based on gaussian mixture model of machine vision. Neural Comput. Appl. 2021, 1, 6683–6693. [Google Scholar] [CrossRef]
- Chen, F.; Selvaggio, M.; Caldwell, D.G. Dexterous grasping by manipulability selection for mobile manipulator with visual guidance. IEEE Trans. Ind. Inform. 2021, 15, 1202–1210. [Google Scholar] [CrossRef]
- Huang, L.; Wu, G.; Wu, Y. Obstacle distance measurement under varying illumination conditions based on monocular vision using a cable inspection robot. IEEE Access 2021, 9, 55955–55973. [Google Scholar] [CrossRef]
- Kutila, M.; Pyykönen, P.; Ritter, W.; Sawade, O.; Schäufele, B. Automotive LIDAR sensor development scenarios for harsh weather conditions. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016. [Google Scholar]
- Dekan, M.; František, D.; Andrej, B.; Jozef, R.; Dávid, R.; Josip, M. Moving obstacles detection based on laser range finder measurements. Int. J. Adv. Robot. Syst. 2018, 15, 1–18. [Google Scholar] [CrossRef] [Green Version]
- Yan, T.; Zhu, H.; Sun, L.; Wang, X.; Ling, P. Detection of 3-D targets with a 2-D laser scanning sensor for greenhouse spray applications. Comput. Electron. Agric. 2018, 152, 363–374. [Google Scholar] [CrossRef]
- Lee, J.; Lee, S.; Lee, Y.; Kim, Y.; Heo, Y.; Yoon, T. Performanceverification of a target tracking system with a laser rangefinder. IEEE Access 2021, 9, 30993–31009. [Google Scholar] [CrossRef]
- Tsuji, S.; Kohama, T. Proximity and contact sensor for human cooperative robot by combining time-of-flight and self-capacitance sensors. IEEE Sens. J. 2020, 20, 5519–5526. [Google Scholar] [CrossRef]
- Han, Y.; Zhao, K.; Chu, Z.; Zhou, Y. Grasping control method of manipulator based on binocular vision combining target detection and trajectory planning. IEEE Access 2019, 4, 167973–167981. [Google Scholar] [CrossRef]
- Pinto, A.M.; Rocha, L.F.; Moreira, A.P. Object recognition using laser range finder and machine learning techniques. Robot. Comput. Integr. Manuf. 2013, 1, 12–22. [Google Scholar] [CrossRef]
- Robichaud, A.; Cicek, P.V.; Deslandes, D.; Nabki, F. Frequency tuning technique of piezoelectric ultrasonic transducers for ranging applications. J. Microelectromechanical Syst. 2018, 27, 570–579. [Google Scholar] [CrossRef]
- Qiu, Y.; Gigliotti, J.V.; Wallace, M.; Griggio, F.; Demore, C.E.; Cochran, S.; Trolier-McKinstry, S. Piezoelectric micromachined ultrasound transducer (PMUT) arrays for integrated sensing, actuation, and imaging. Sensors 2015, 15, 8020–8041. [Google Scholar] [CrossRef] [Green Version]
- Gijsenbergh, P.; Halbach, A.; Jeong, Y.; Torri, G.B.; Billen, M.; Demi, L.; Rochus, V. Characterization of polymer-based piezoelectric micromachined ultrasound transducers for short-range gesture recognition applications. J. Micromech. Microeng. 2019, 29, 7. [Google Scholar] [CrossRef]
- Tong, Z.; Hu, H.; Wu, Z.; Xie, S.; Chen, G.; Zhang, S.; Liu, H. An ultrasonic proximity sensing skin for robot safety control by using piezoelectric micromachined ultrasonic transducers (PMUTs). IEEE Sens. J. 2021, 22, 17351–17361. [Google Scholar] [CrossRef]
- Chen, Q.; Li, W.; Wu, J. Realization of a multipath ultrasonic gas flowmeter based on transit-time technique. Ultrasonics 2014, 1, 285–290. [Google Scholar] [CrossRef]
- Chen, X.; Xu, J.; Chen, H.; Ding, H.; Xie, J. High-accuracy ultrasonic rangefinders via pMUTs arrays using multi-frequency continuous waves. J. Microelectromechanical Syst. 2019, 28, 634–642. [Google Scholar] [CrossRef]
- Wu, Z.; Liu, W.; Tong, Z.; Cai, Y.; Sun, C.; Lou, L. Tuning characteristics of AlN-based piezoelectric micromachined ultrasonic transducers using DC bias voltage. IEEE Trans. Electron Devices 2022, 69, 729–735. [Google Scholar] [CrossRef]
- Angrisani, L.; Moriello, R.S.L. Estimating ultrasonic Time-of-Flight through quadrature demodulation. IEEE Trans. Instrum. Meas. 1997, 55, 54–62. [Google Scholar] [CrossRef]
- Sabatini, A.M. Correlation receivers using laguerre filter banks for modelling narrowband ultrasonic echoes and estimating their Time-of-Flights. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2005, 44, 1253–1263. [Google Scholar] [CrossRef]
- Xiong, J.; Gu, H.; Hu, K.; Hu, M. Influence of substrate metals on the crystal growth of AlN films. Int. J. Miner. Metall. Mater. 2010, 17, 98–103. [Google Scholar] [CrossRef]
- Wu, Z.; Liu, W.; Tong, Z.; Zhang, S.; Gu, Y.; Lou, L. A novel transfer function based ring-down suppression system for PMUTs. Sensors 2021, 21, 6414. [Google Scholar] [CrossRef]
- Available online: https://www.universal-robots.com (accessed on 26 February 2023).
- Available online: https://github.com/tuftsBaxter/ROS-for-LabVIEW-Software (accessed on 26 February 2023).
- Available online: https://moveit.ros.org (accessed on 26 February 2023).
- Willmott, C.J.; Matsuura, K. Advantages of the mean absolute error (MAE) over the root mean square error (RMSE) in assessing average model performance. Clim. Res. 2005, 30, 79–82. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Related Parameters | Values |
|---|---|
| Detection range (m) | 0.05~40 |
| Resolution (mm) | 1 |
| Repeatability (mm) | ±1 |
| Measurement rate (Hz) | 5 (Continuous measurement mode) 20 (Fast measurement mode) |
| Price ($) | 50 |
| Air | Acrylic Plates | Ultrasonic Waves | Light Waves | |
|---|---|---|---|---|
| Density(kg/m3) | 1.210 | 1.200 × 103 | ||
| Speed of Sound(m/s) | 3.420 × 103 | 2.700 × 103 | ||
| Acoustic Impedance (Ns/m3) | 4.150 × 103 | 3.240 × 103 | ||
| Refractive Index | 1.000 | 1.490 | ||
| Reflectivity | 99.981% | 19.679% | ||
| Transmittance | 0.026% | 80.321% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, M.; Tong, Z.; Wu, Z.; Lou, L. An Ultrasonic Target Detection System Based on Piezoelectric Micromachined Ultrasonic Transducers. Micromachines 2023, 14, 683. https://doi.org/10.3390/mi14030683
Gao M, Tong Z, Wu Z, Lou L. An Ultrasonic Target Detection System Based on Piezoelectric Micromachined Ultrasonic Transducers. Micromachines. 2023; 14(3):683. https://doi.org/10.3390/mi14030683
Chicago/Turabian StyleGao, Mingze, Zhihao Tong, Zhipeng Wu, and Liang Lou. 2023. "An Ultrasonic Target Detection System Based on Piezoelectric Micromachined Ultrasonic Transducers" Micromachines 14, no. 3: 683. https://doi.org/10.3390/mi14030683