
Static and Dynamic Analysis of a Bistable Frequency Up-Converter Piezoelectric Energy Harvester

Abstract
:1. Introduction
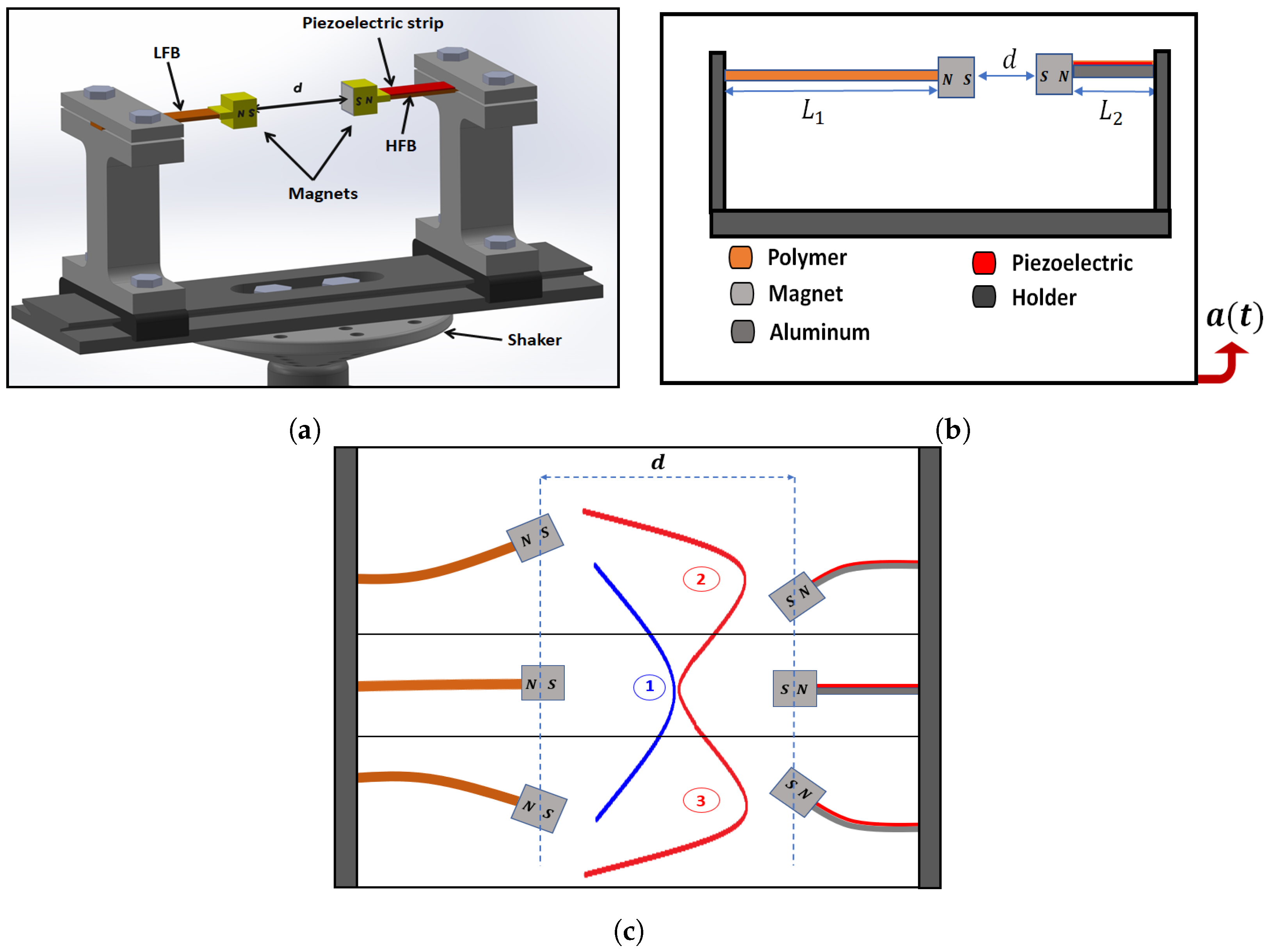
2. Device Configuration and Principle of Operation
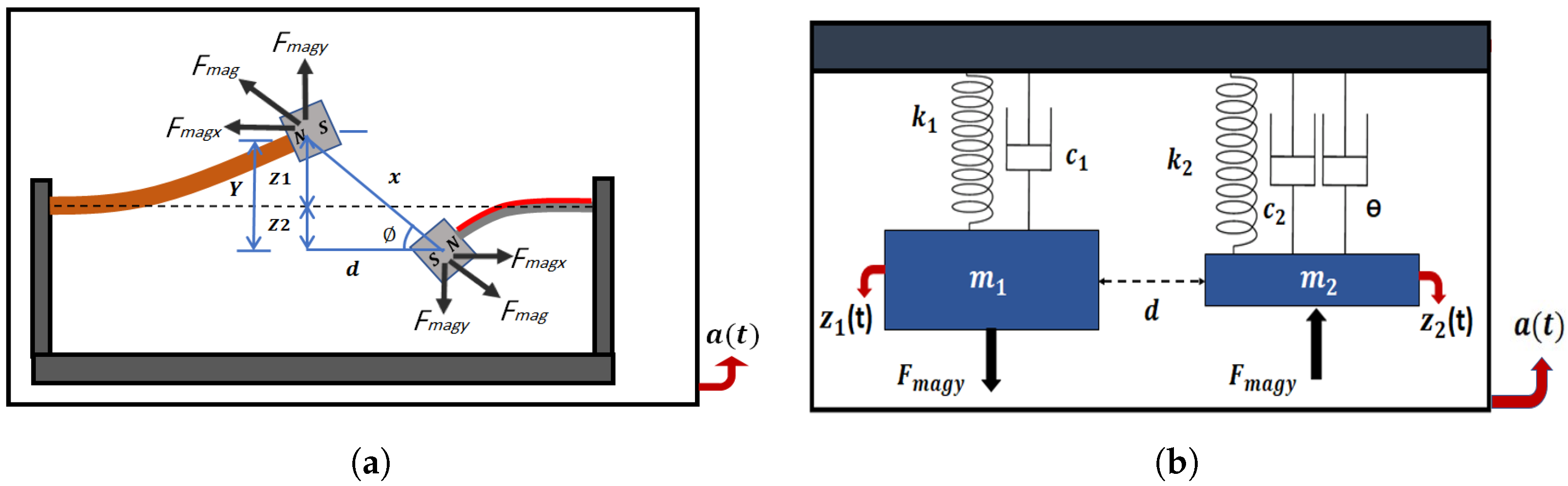
3. Theoretical Model
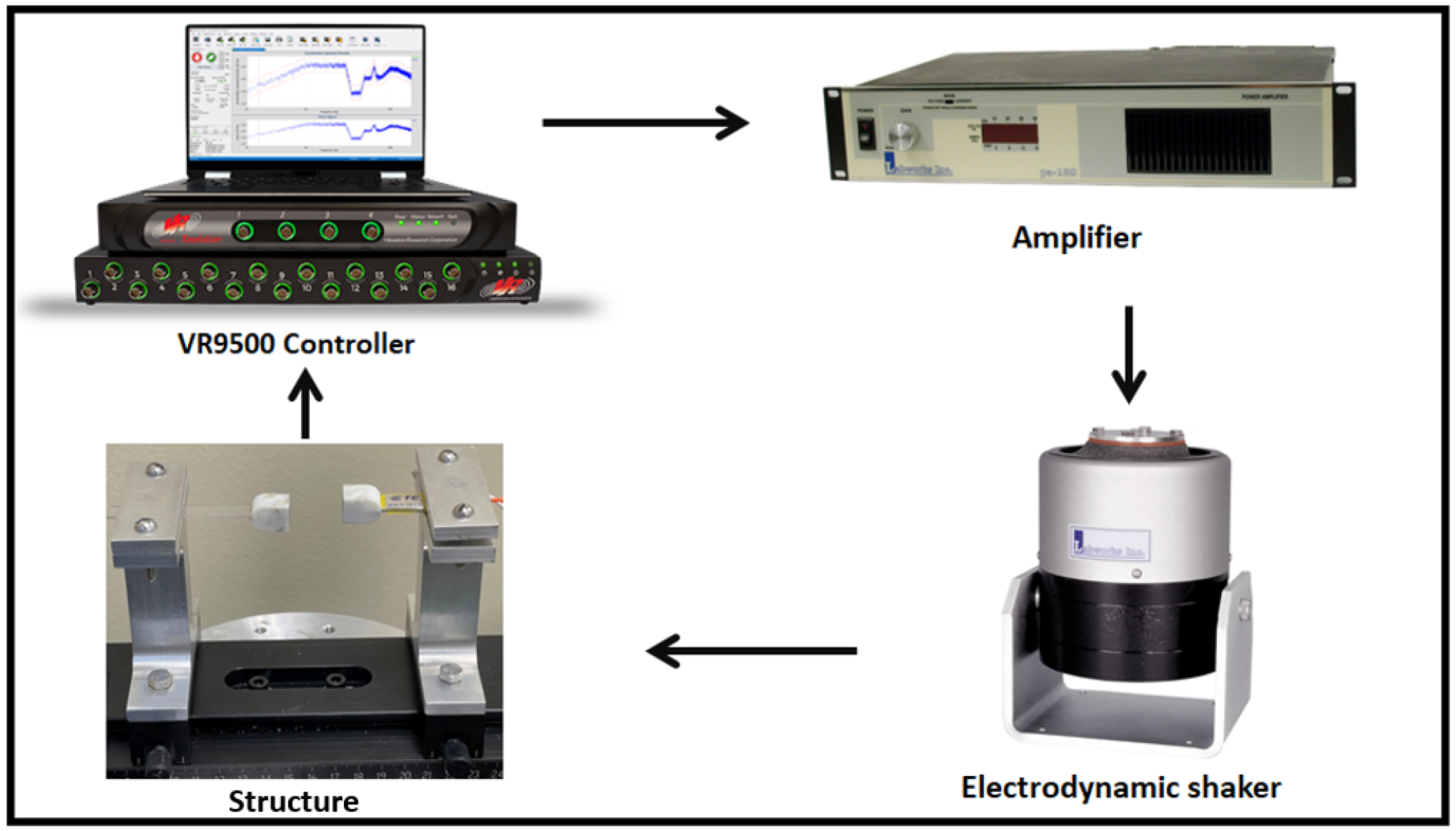
4. Experimental Setup
5. Results and Discussion
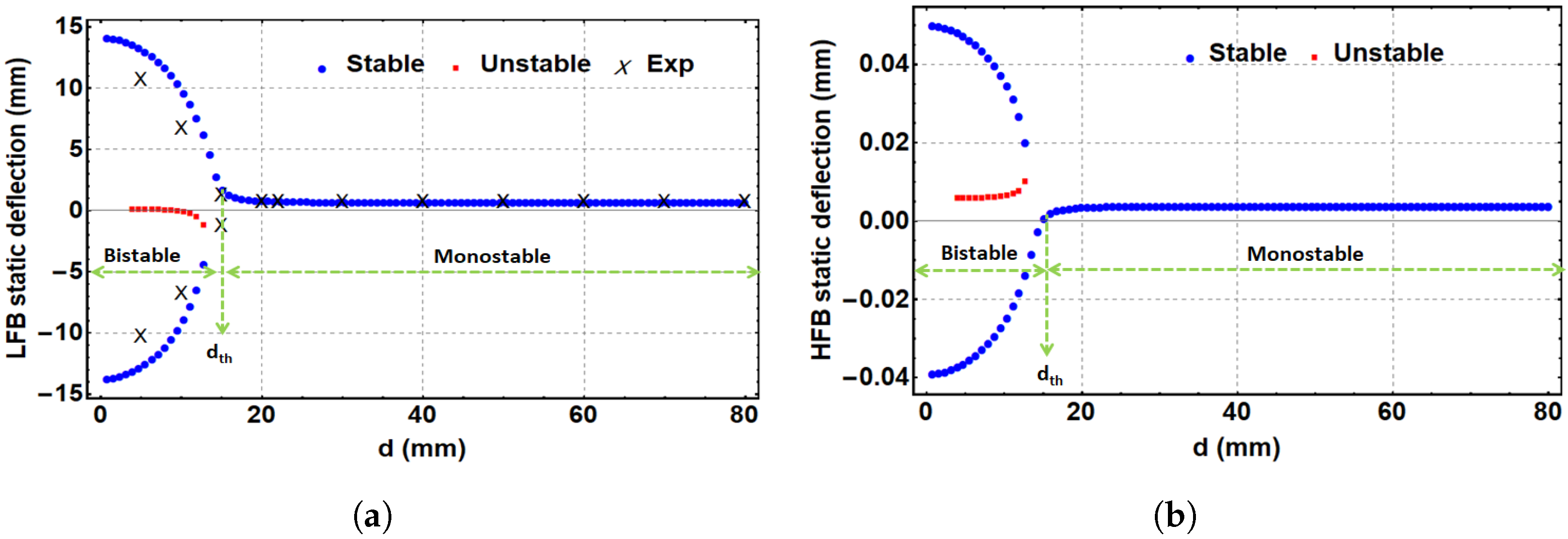
5.1. Static Analysis
5.2. Dynamic Analysis
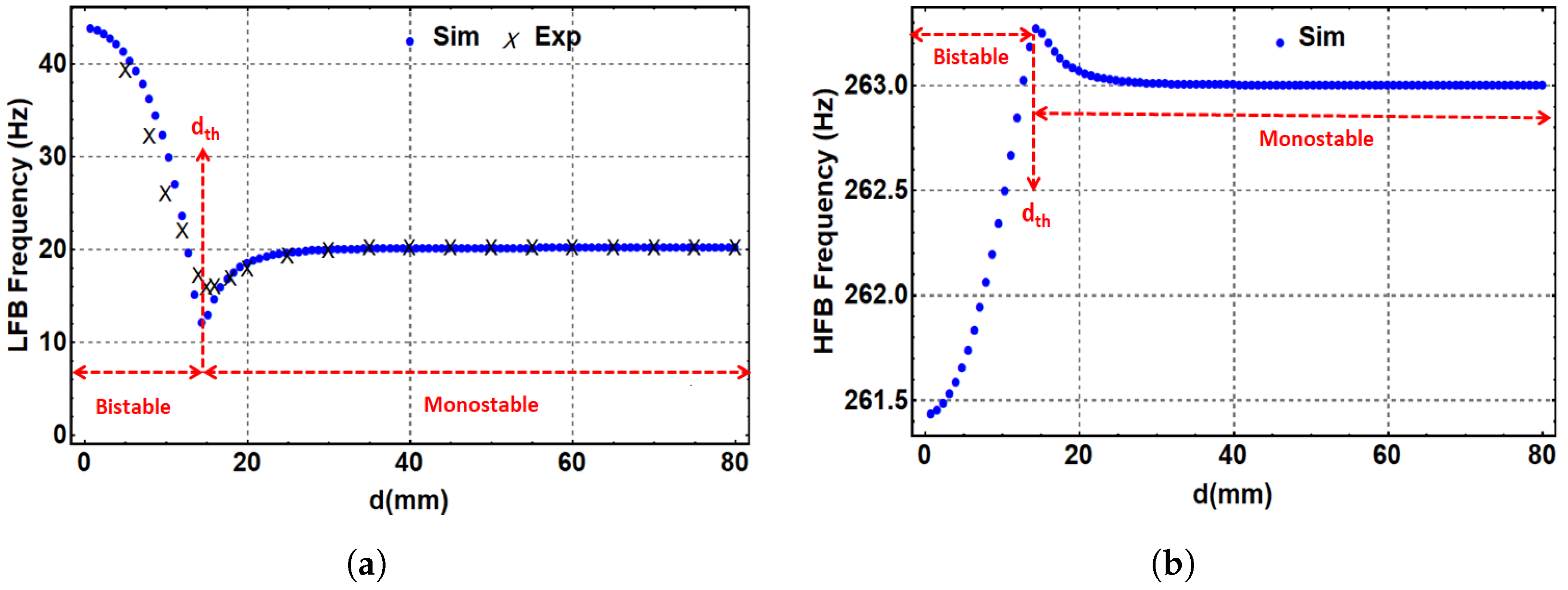
5.2.1. Natural Frequencies
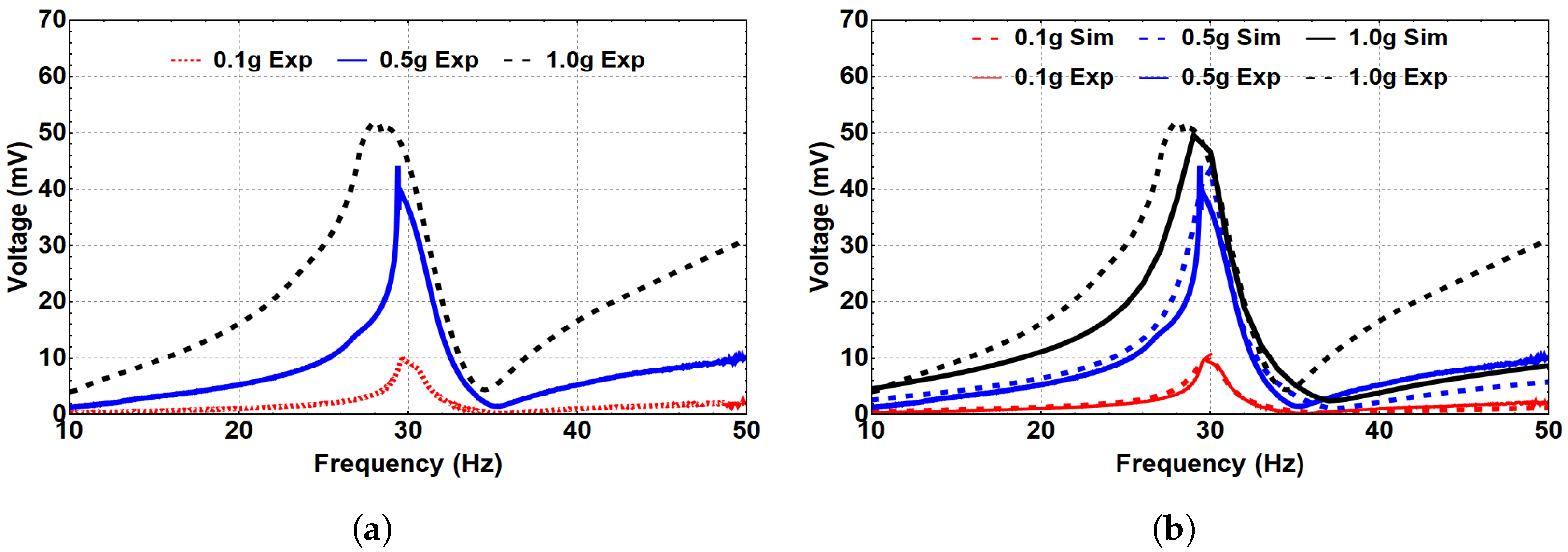
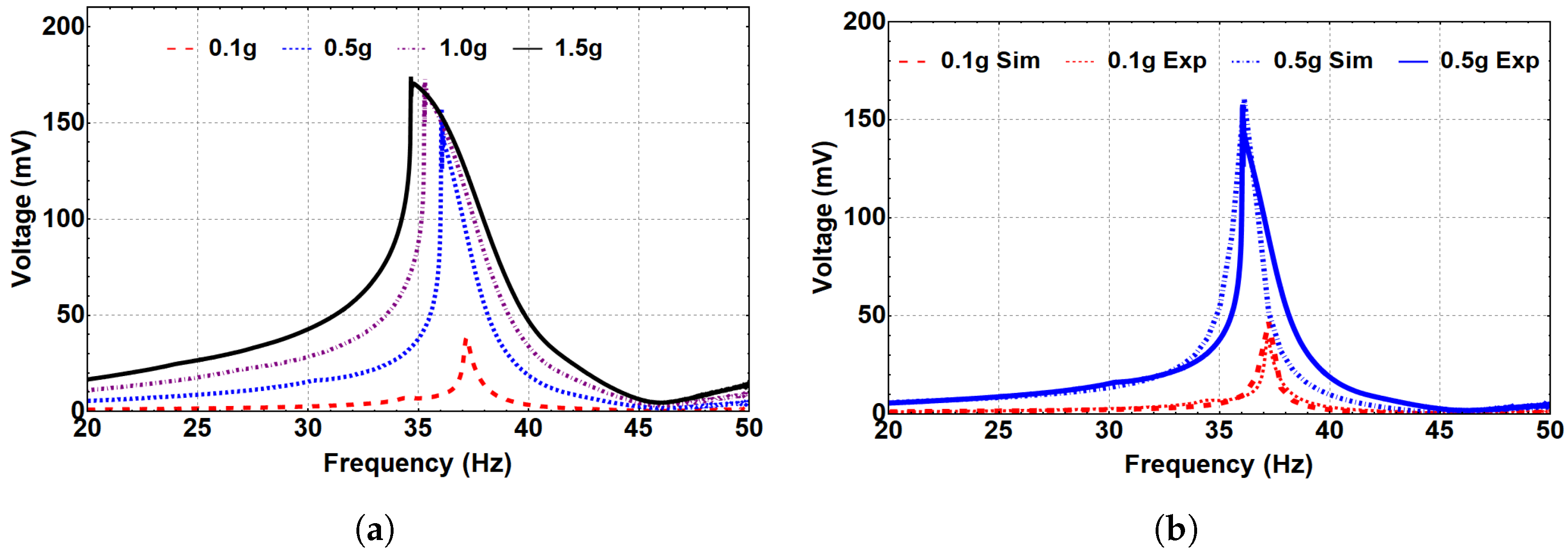
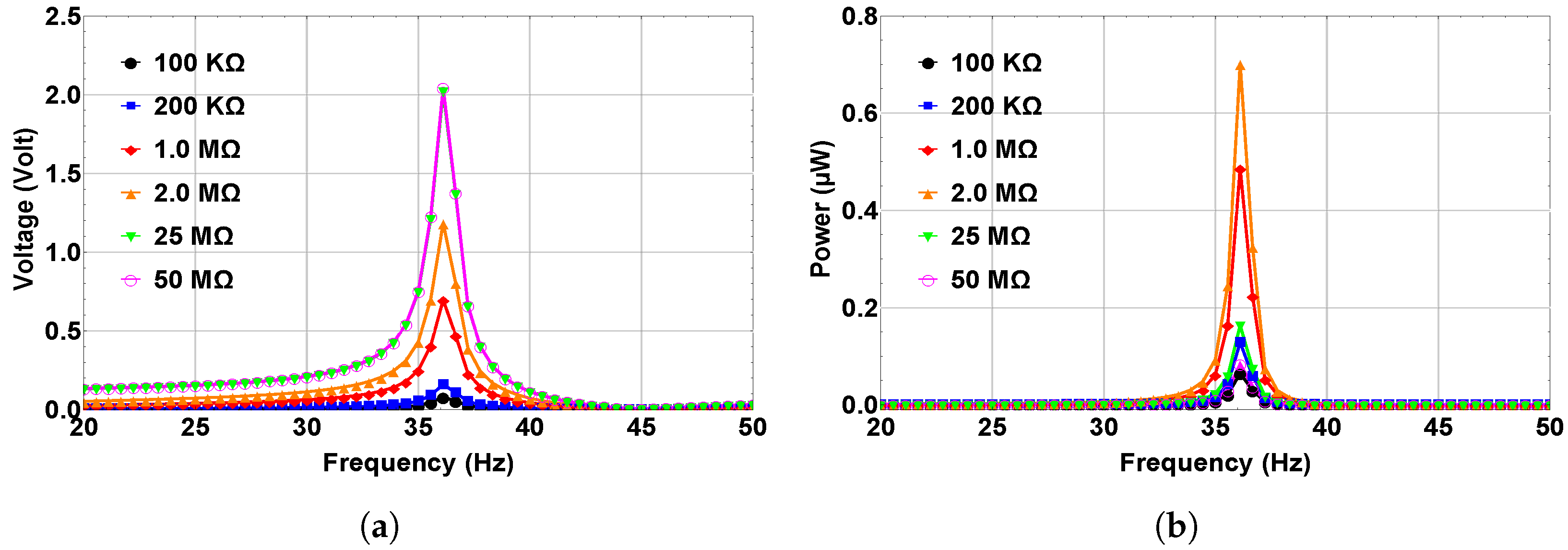
5.2.2. Linear Analysis
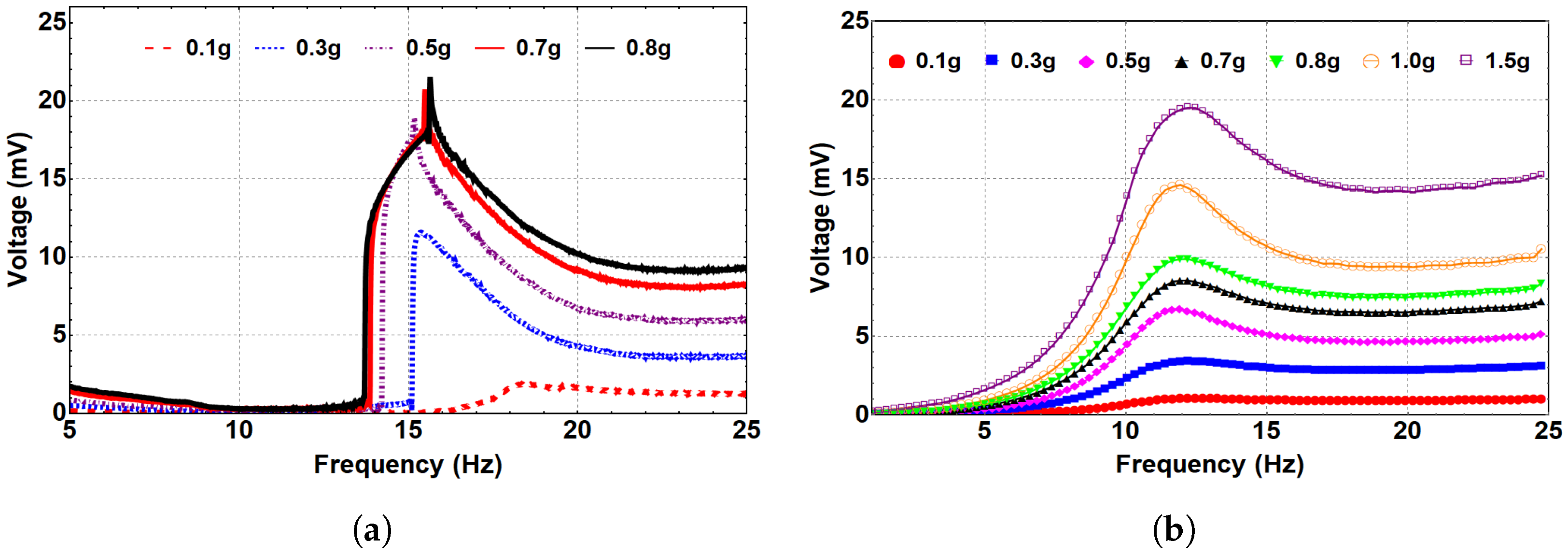
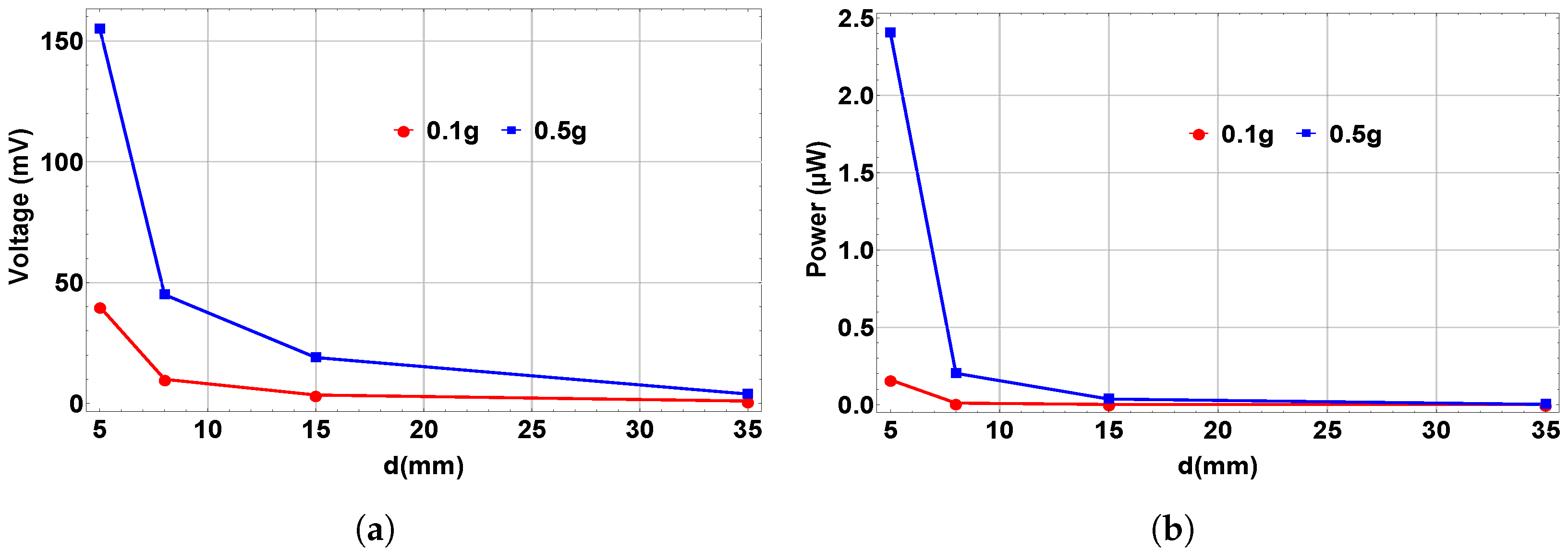
5.2.3. Nonlinear Analysis
6. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. The Coefficients of the Expanded Magnetic Force
References
- Sullivan, J.; Gaines, L. A Review of Battery Life-Cycle Analysis: State of Knowledge and Critical Needs; Argonne National Lab. (ANL): Argonne, IL, USA, 2010. [Google Scholar]
- Roundy, S.; Wright, P.; Rabaey, J. A study of low level vibrations as a power source for wireless sensor nodes. Comput. Commun. 2003, 26, 1131–1144. [Google Scholar] [CrossRef]
- Miller, L.; Halvorsen, E.; Dong, T.; Wright, P. Modeling and experimental verification of low-frequency MEMS energy harvesting from ambient vibrations. J. Micromechanics Microengineering 2011, 21, 045029. [Google Scholar] [CrossRef]
- Paci, D.; Schipani, M.; Bottarel, V.; Miatton, D. Optimization of a piezoelectric energy harvester for environmental broadband vibrations. In Proceedings of the 2008 15th IEEE International Conference On Electronics, Circuits Additionally, Systems, Saint Julian’s, Malta, 31 August–3 September 2008; pp. 177–181. [Google Scholar]
- Ibrahim, A.; Towfighian, S.; Younis, M.; Su, Q. Magnetoelastic beam with extended polymer for low frequency vibration energy harvesting. In Proceedings of the SPIE Smart Structures Additionally, Materials+ Nondestructive Evaluation Additionally, Health Monitoring, Las Vegas, NV, USA, 20–24 March 2016; p. 98060B. [Google Scholar]
- McNutt, S. Observations and analysis of B-type earthquakes, explosions, and volcanic tremor at Pavlof Volcano, Alaska. Bull. Seismol. Soc. Am. 1986, 76, 153–175. [Google Scholar]
- Reilly, E.; Miller, L.; Fain, R.; Wright, P. A study of ambient vibrations for piezoelectric energy conversion. Proc. PowerMEMS 2009, 2009, 312–315. [Google Scholar]
- Tan, Y.; Dong, Y.; Wang, X. Review of MEMS electromagnetic vibration energy harvester. J. Microelectromech. Syst. 2016, 26, 1–16. [Google Scholar] [CrossRef]
- Zhao, C.; Yang, Y.; Upadrashta, D.; Zhao, L. Design, modeling and experimental validation of a low-frequency cantilever triboelectric energy harvester. Energy 2021, 214, 118885. [Google Scholar] [CrossRef]
- Ibrahim, A.; Ramini, A.; Towfighian, S. Triboelectric energy harvester with large bandwidth under harmonic and random excitations. Energy Rep. 2020, 6, 2490–2502. [Google Scholar] [CrossRef]
- Kim, H.; Kim, J.; Kim, J. A review of piezoelectric energy harvesting based on vibration. Int. J. Precis. Eng. Manuf. 2011, 12, 1129–1141. [Google Scholar] [CrossRef]
- Amin Karami, M.; Inman, D. Powering pacemakers from heartbeat vibrations using linear and nonlinear energy harvesters. Appl. Phys. Lett. 2012, 100, 042901. [Google Scholar] [CrossRef]
- Qi, Y.; Jafferis, N.; Lyons Jr, K.; Lee, C.; Ahmad, H.; McAlpine, M. Piezoelectric ribbons printed onto rubber for flexible energy conversion. Nano Lett. 2010, 10, 524–528. [Google Scholar] [CrossRef] [Green Version]
- Ali, S.; Friswell, M.; Adhikari, S. Analysis of energy harvesters for highway bridges. J. Intell. Mater. Syst. Struct. 2011, 22, 1929–1938. [Google Scholar] [CrossRef]
- Erturk, A. Piezoelectric energy harvesting for civil infrastructure system applications: Moving loads and surface strain fluctuations. J. Intell. Mater. Syst. Struct. 2011, 22, 1959–1973. [Google Scholar] [CrossRef]
- Anton, S.; Erturk, A.; Inman, D. Multifunctional unmanned aerial vehicle wing spar for low-power generation and storage. J. Aircr. 2012, 49, 292–301. [Google Scholar] [CrossRef] [Green Version]
- Erturk, A.; Renno, J.; Inman, D. Modeling of piezoelectric energy harvesting from an L-shaped beam-mass structure with an application to UAVs. J. Intell. Mater. Syst. Struct. 2009, 20, 529–544. [Google Scholar] [CrossRef]
- Featherston, C.; Holford, K.; Greaves, B. Harvesting vibration energy for structural health monitoring in aircraft. Key Eng. Mater. 2009, 413, 439–446. [Google Scholar] [CrossRef]
- Lee, S.; Youn, B. A new piezoelectric energy harvesting design concept: Multimodal energy harvesting skin. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2011, 58, 629–645. [Google Scholar] [CrossRef]
- Le, M.; Capsal, J.; Lallart, M.; Hebrard, Y.; Van Der Ham, A.; Reffe, N.; Geynet, L.; Cottinet, P. Review on energy harvesting for structural health monitoring in aeronautical applications. Prog. Aerosp. Sci. 2015, 79, 147–157. [Google Scholar] [CrossRef]
- Mann, B.; Sims, N. Energy harvesting from the nonlinear oscillations of magnetic levitation. J. Sound Vib. 2009, 319, 515–530. [Google Scholar] [CrossRef] [Green Version]
- Erturk, A.; Inman, D. Broadband piezoelectric power generation on high-energy orbits of the bistable Duffing oscillator with electromechanical coupling. J. Sound Vib. 2011, 330, 2339–2353. [Google Scholar] [CrossRef]
- Triplett, A.; Quinn, D. The effect of non-linear piezoelectric coupling on vibration-based energy harvesting. J. Intell. Mater. Syst. Struct. 2009, 20, 1959–1967. [Google Scholar] [CrossRef]
- Stanton, S.; Erturk, A.; Mann, B.; Inman, D. Nonlinear piezoelectricity in electroelastic energy harvesters: Modeling and experimental identification. J. Appl. Phys. 2010, 108, 074903. [Google Scholar] [CrossRef] [Green Version]
- Kim, P.; Bae, S.; Seok, J. Resonant behaviors of a nonlinear cantilever beam with tip mass subject to an axial force and electrostatic excitation. Int. J. Mech. Sci. 2012, 64, 232–257. [Google Scholar] [CrossRef]
- Abdelkefi, A.; Nayfeh, A.; Hajj, M. Global nonlinear distributed-parameter model of parametrically excited piezoelectric energy harvesters. Nonlinear Dyn. 2012, 67, 1147–1160. [Google Scholar] [CrossRef]
- Kim, P.; Yoon, Y.; Seok, J. Nonlinear dynamic analyses on a magnetopiezoelastic energy harvester with reversible hysteresis. Nonlinear Dyn. 2016, 83, 1823–1854. [Google Scholar] [CrossRef]
- Dos Santos, M.; Ferreira, J.; Simões, J.; Pascoal, R.; Torrão, J.; Xue, X.; Furlani, E. Magnetic levitation-based electromagnetic energy harvesting: A semi-analytical non-linear model for energy transduction. Sci. Rep. 2016, 6, 18579. [Google Scholar] [CrossRef] [Green Version]
- Seol, M.; Han, J.; Jeon, S.; Meyyappan, M.; Choi, Y. Floating oscillator-embedded triboelectric generator for versatile mechanical energy harvesting. Sci. Rep. 2015, 5, 16409. [Google Scholar] [CrossRef] [Green Version]
- Ibrahim, A.; Towfighian, S.; Younis, M. Dynamics of transition regime in bistable vibration energy harvesters. J. Vib. Acoust. 2017, 139, 051008. [Google Scholar] [CrossRef] [Green Version]
- Covaci, C.; Gontean, A. Piezoelectric energy harvesting solutions: A review. Sensors 2020, 20, 3512. [Google Scholar] [CrossRef]
- Izadgoshasb, I.; Lim, Y.; Tang, L.; Padilla, R.; Tang, Z.; Sedighi, M. Improving efficiency of piezoelectric based energy harvesting from human motions using double pendulum system. Energy Convers. Manag. 2019, 184, 559–570. [Google Scholar] [CrossRef]
- Ibrahim, S.; Ali, W. A review on frequency tuning methods for piezoelectric energy harvesting systems. J. Renew. Sustain. Energy 2012, 4, 062703. [Google Scholar] [CrossRef]
- Zhu, D.; Roberts, S.; Tudor, M.; Beeby, S. Design and experimental characterization of a tunable vibration-based electromagnetic micro-generator. Sens. Actuators A Phys. 2010, 158, 284–293. [Google Scholar] [CrossRef] [Green Version]
- Sun, W.; Jung, J.; Wang, X.; Kim, P.; Seok, J.; Jang, D. Design, simulation, and optimization of a frequency-tunable vibration energy harvester that uses a magnetorheological elastomer. Adv. Mech. Eng. 2015, 7, 147421. [Google Scholar] [CrossRef]
- Wickenheiser, A.; Garcia, E. Broadband vibration-based energy harvesting improvement through frequency up-conversion by magnetic excitation. Smart Mater. Struct. 2010, 19, 065020. [Google Scholar] [CrossRef]
- Masana, R.; Daqaq, M. Electromechanical modeling and nonlinear analysis of axially loaded energy harvesters. J. Vib. Acoust. 2011, 133, 011007. [Google Scholar] [CrossRef]
- Gammaitoni, L.; Neri, I.; Vocca, H. Nonlinear oscillators for vibration energy harvesting. Appl. Phys. Lett. 2009, 94, 164102. [Google Scholar] [CrossRef] [Green Version]
- Soliman, M.; Abdel-Rahman, E.; El-Saadany, E.; Mansour, R. A design procedure for wideband micropower generators. J. Microelectromech. Syst. 2009, 18, 1288–1299. [Google Scholar] [CrossRef]
- Moon, F.; Holmes, P. A magnetoelastic strange attractor. J. Sound Vib. 1979, 65, 275–296. [Google Scholar] [CrossRef]
- Stanton, S.; Owens, B.; Mann, B. Harmonic balance analysis of the bistable piezoelectric inertial generator. J. Sound Vib. 2012, 331, 3617–3627. [Google Scholar] [CrossRef]
- Gu, L.; Livermore, C. Impact-driven, frequency up-converting coupled vibration energy harvesting device for low frequency operation. Smart Mater. Struct. 2011, 20, 045004. [Google Scholar] [CrossRef]
- Liu, H.; Lee, C.; Kobayashi, T.; Tay, C.; Quan, C. Piezoelectric MEMS-based wideband energy harvesting systems using a frequency-up-conversion cantilever stopper. Sens. Actuators A Phys. 2012, 186, 242–248. [Google Scholar] [CrossRef]
- Zorlu, Ö.; Topal, E.; Külah, H. A vibration-based electromagnetic energy harvester using mechanical frequency up-conversion method. IEEE Sens. J. 2010, 11, 481–488. [Google Scholar] [CrossRef]
- Sari, I.; Balkan, T.; Külah, H. An electromagnetic micro power generator for low-frequency environmental vibrations based on the frequency upconversion technique. J. Microelectromech. Syst. 2009, 19, 14–27. [Google Scholar] [CrossRef]
- Galchev, T.; Kim, H.; Najafi, K. Micro power generator for harvesting low-frequency and nonperiodic vibrations. J. Microelectromech. Syst. 2011, 20, 852–866. [Google Scholar] [CrossRef]
- Ashraf, K.; Khir, M.; Dennis, J.; Baharudin, Z. A wideband, frequency up-converting bounded vibration energy harvester for a low-frequency environment. Smart Mater. Struct. 2013, 22, 025018. [Google Scholar] [CrossRef]
- Fakeih, E. Harvesting Mechanical Vibrations Using a Frequency Up-Converter. Master’s Thesis, KAUST Department, Thuwal, Saudi Arabia, 2020. [Google Scholar]
- Fakeih, E.; Almansouri, A.; Kosel, J.; Younis, M.; Salama, K. A Wideband Magnetic Frequency Up-Converter Energy Harvester. Adv. Eng. Mater. 2021, 23, 2001364. [Google Scholar] [CrossRef]
- Atmeh, M.; Ibrahim, A. Modeling of Piezoelectric Vibration Energy Harvesting From Low-Frequency Using Frequency Up-Conversion. Smart Mater. Adapt. Struct. Intell. Syst. 2021, 85499, V001T04A011. [Google Scholar]
- Edwards, B.; Xie, M.; Aw, K.; Hu, A.; Gao, W. An impact based frequency up-conversion mechanism for low frequency vibration energy harvesting. In Proceedings of the 2013 Transducers & Eurosensors XXVII: The 17th International Conference On Solid-State Sensors, Actuators Additionally, Microsystems (TRANSDUCERS & EUROSENSORS XXVII), Barcelona, Spain, 16–20 June 2013; pp. 1344–1347. [Google Scholar]
- Liu, H.; Lee, C.; Kobayashi, T.; Tay, C.; Quan, C. Investigation of a MEMS piezoelectric energy harvester system with a frequency-widened-bandwidth mechanism introduced by mechanical stoppers. Smart Mater. Struct. 2012, 21, 035005. [Google Scholar] [CrossRef]
- Pozzi, M.; Zhu, M. Plucked piezoelectric bimorphs for energy harvesting applications. Smart Sens. Actuators MEMS V 2011, 8066, 806616. [Google Scholar]
- Moss, S.; Barry, A.; Powlesland, I.; Galea, S.; Carman, G. A low profile vibro-impacting energy harvester with symmetrical stops. Appl. Phys. Lett. 2010, 97, 234101. [Google Scholar] [CrossRef]
- Halim, M.; Cho, H.; Park, J. Design and experiment of a human-limb driven, frequency up-converted electromagnetic energy harvester. Energy Convers. Manag. 2015, 106, 393–404. [Google Scholar] [CrossRef]
- Fu, H.; Yeatman, E. A methodology for low-speed broadband rotational energy harvesting using piezoelectric transduction and frequency up-conversion. Energy 2017, 125, 152–161. [Google Scholar] [CrossRef] [Green Version]
- Jung, S.; Yun, K. Energy-harvesting device with mechanical frequency-up conversion mechanism for increased power efficiency and wideband operation. Appl. Phys. Lett. 2010, 96, 111906. [Google Scholar] [CrossRef]
- Kulah, H.; Najafi, K. Energy scavenging from low-frequency vibrations by using frequency up-conversion for wireless sensor applications. IEEE Sens. J. 2008, 8, 261–268. [Google Scholar] [CrossRef]
- Almansouri, A.; Salama, K.; Kosel, J. Magneto-Acoustic Resonator for Aquatic Animal Tracking. IEEE Trans. Magn. 2018, 55, 1–4. [Google Scholar] [CrossRef]
- Marinkovic, B.; Koser, H. Smart sand—a wide bandwidth vibration energy harvesting platform. Appl. Phys. Lett. 2009, 94, 103505. [Google Scholar] [CrossRef]
- Tvedt, L.; Nguyen, D.; Halvorsen, E. Nonlinear behavior of an electrostatic energy harvester under wide-and narrowband excitation. J. Microelectromech. Syst. 2010, 19, 305–316. [Google Scholar] [CrossRef] [Green Version]
- Miki, D.; Honzumi, M.; Suzuki, Y.; Kasagi, N. Large-amplitude MEMS electret generator with nonlinear spring. In Proceedings of the 2010 IEEE 23rd International Conference On Micro Electro Mechanical Systems (MEMS), Hong Kong, China, 24–28 January 2010; pp. 176–179. [Google Scholar]
- Erturk, A.; Hoffmann, J.; Inman, D. A piezomagnetoelastic structure for broadband vibration energy harvesting. Appl. Phys. Lett. 2009, 94, 254102. [Google Scholar] [CrossRef] [Green Version]
- Cammarano, A.; Burrow, S.; Barton, D. Modelling and experimental characterization of an energy harvester with bi-stable compliance characteristics. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2011, 225, 475–484. [Google Scholar] [CrossRef]
- Andò, B.; Baglio, S.; Trigona, C.; Dumas, N.; Latorre, L.; Nouet, P. Nonlinear mechanism in MEMS devices for energy harvesting applications. J. Micromechanics Microengineering 2010, 20, 125020. [Google Scholar] [CrossRef] [Green Version]
- Ferrari, M.; Baù, M.; Guizzetti, M.; Ferrari, V. A single-magnet nonlinear piezoelectric converter for enhanced energy harvesting from random vibrations. Sens. Actuators A Phys. 2011, 172, 287–292. [Google Scholar] [CrossRef]
- Ferrari, M.; Ferrari, V.; Guizzetti, M.; Ando, B.; Baglio, S.; Trigona, C. Improved energy harvesting from wideband vibrations by nonlinear piezoelectric converters. Sens. Actuators A Phys. 2010, 162, 425–431. [Google Scholar] [CrossRef] [Green Version]
- Lin, J.; Lee, B.; Alphenaar, B. The magnetic coupling of a piezoelectric cantilever for enhanced energy harvesting efficiency. Smart Mater. Struct. 2010, 19, 045012. [Google Scholar] [CrossRef]
- Al-Ashtari, W.; Hunstig, M.; Hemsel, T.; Sextro, W. Frequency tuning of piezoelectric energy harvesters by magnetic force. Smart Mater. Struct. 2012, 21, 035019. [Google Scholar] [CrossRef]
- Tang, L.; Wu, H.; Yang, Y.; Soh, C. Optimal performance of nonlinear energy harvesters. In Proceedings of the 22nd International Conference On Adaptive Structures Additionally, Technologies (ICAST), Corfu, Greece, 10–12 October 2011. [Google Scholar]
- Tang, L.; Yang, Y.; Soh, C. Improving functionality of vibration energy harvesters using magnets. J. Intell. Mater. Syst. Struct. 2012, 23, 1433–1449. [Google Scholar] [CrossRef]
- Noh, J.; Kim, P.; Yoon, Y. Load Resistance Optimization of a Magnetically Coupled Two-Degree-of-Freedom Bistable Energy Harvester Considering Third-Harmonic Distortion in Forced Oscillation. Sensors 2021, 21, 2668. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Li, Z.; Huang, H.; Wu, Z.; Huang, Z.; Mao, H.; Cao, Y. Broadband spring-connected bi-stable piezoelectric vibration energy harvester with variable potential barrier. Results Phys. 2020, 18, 103173. [Google Scholar] [CrossRef]
- Younis, M. MEMS Linear and Nonlinear Statics and Dynamics; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbol | Value |
|---|---|---|
| LFB (length × width × thickness) | () mm | |
| LFB Young’s modulus | Gpa | |
| LFB Density | 1220 kg/m | |
| LFB Damping coefficient | N s/m | |
| HFB (length × width × thickness) | () mm | |
| HFB Young’s modulus | Gpa | |
| HFB Density | 2700 kg/m | |
| HFB Damping coefficient | N s/m | |
| Piezoelectric (length × width × thickness) | () mm | |
| Piezoelectric Young’s modulus | 2450 Mpa | |
| Piezoelectric Density | 1780 kg/m | |
| Resistance | R | 200 k |
| Magnets side length | mm | |
| Magnetic moment | 0.5 A/m | |
| Piezo Strain Constant | ||
| Piezoelectric Laminate permittivity |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Atmeh, M.; Ibrahim, A.; Ramini, A. Static and Dynamic Analysis of a Bistable Frequency Up-Converter Piezoelectric Energy Harvester. Micromachines 2023, 14, 261. https://doi.org/10.3390/mi14020261
Atmeh M, Ibrahim A, Ramini A. Static and Dynamic Analysis of a Bistable Frequency Up-Converter Piezoelectric Energy Harvester. Micromachines. 2023; 14(2):261. https://doi.org/10.3390/mi14020261
Chicago/Turabian StyleAtmeh, Mohammad, Alwathiqbellah Ibrahim, and Abdallah Ramini. 2023. "Static and Dynamic Analysis of a Bistable Frequency Up-Converter Piezoelectric Energy Harvester" Micromachines 14, no. 2: 261. https://doi.org/10.3390/mi14020261