

Enhancing Performance of a MEMS-Based Piezoresistive Pressure Sensor by Groove: Investigation of Groove Design Using Finite Element Method
 , ,
, ,
Abstract
:1. Introduction
2. Background
2.1. Working Principle of MEMS Piezoresistive Pressure Sensors
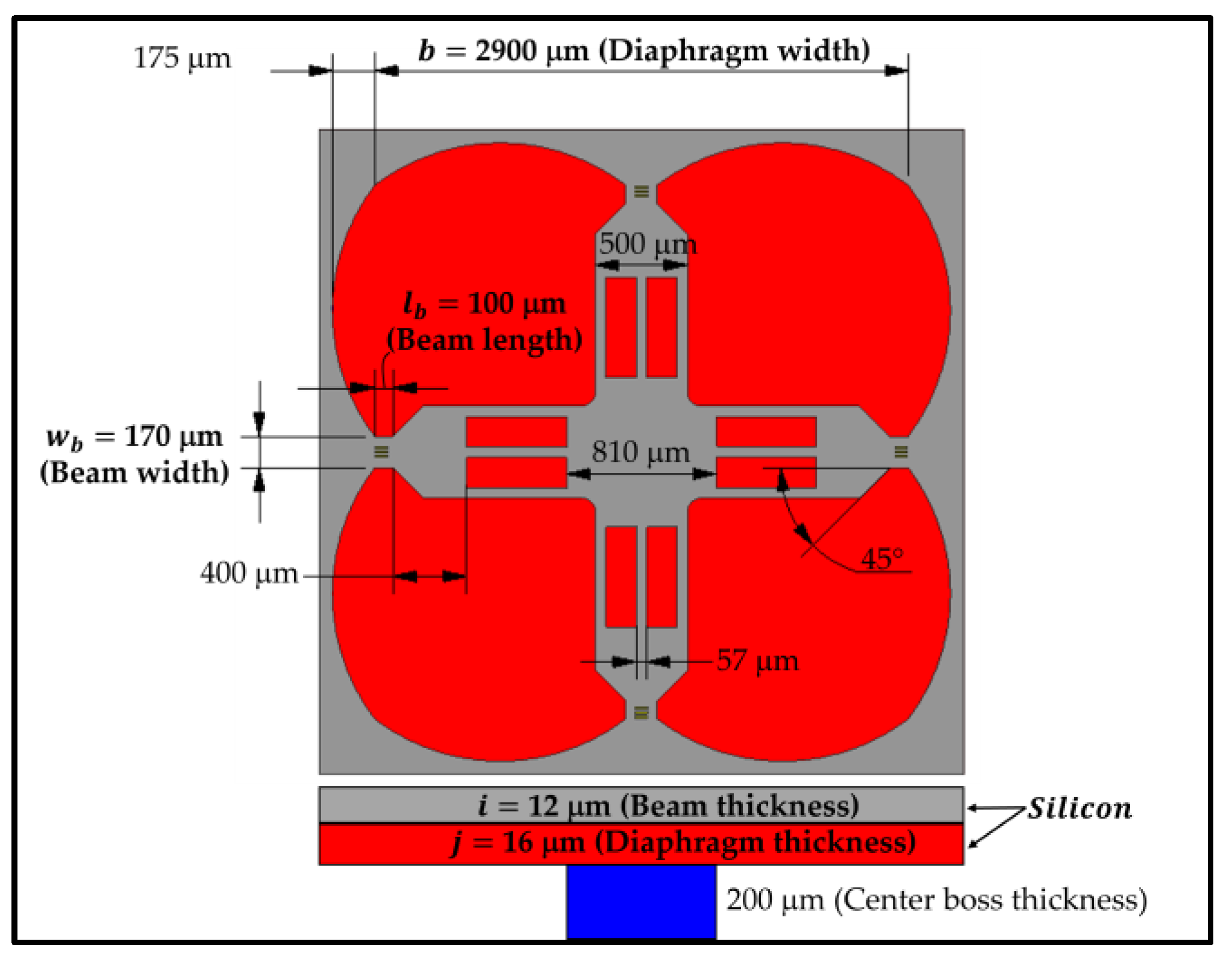
2.2. Design Considerations
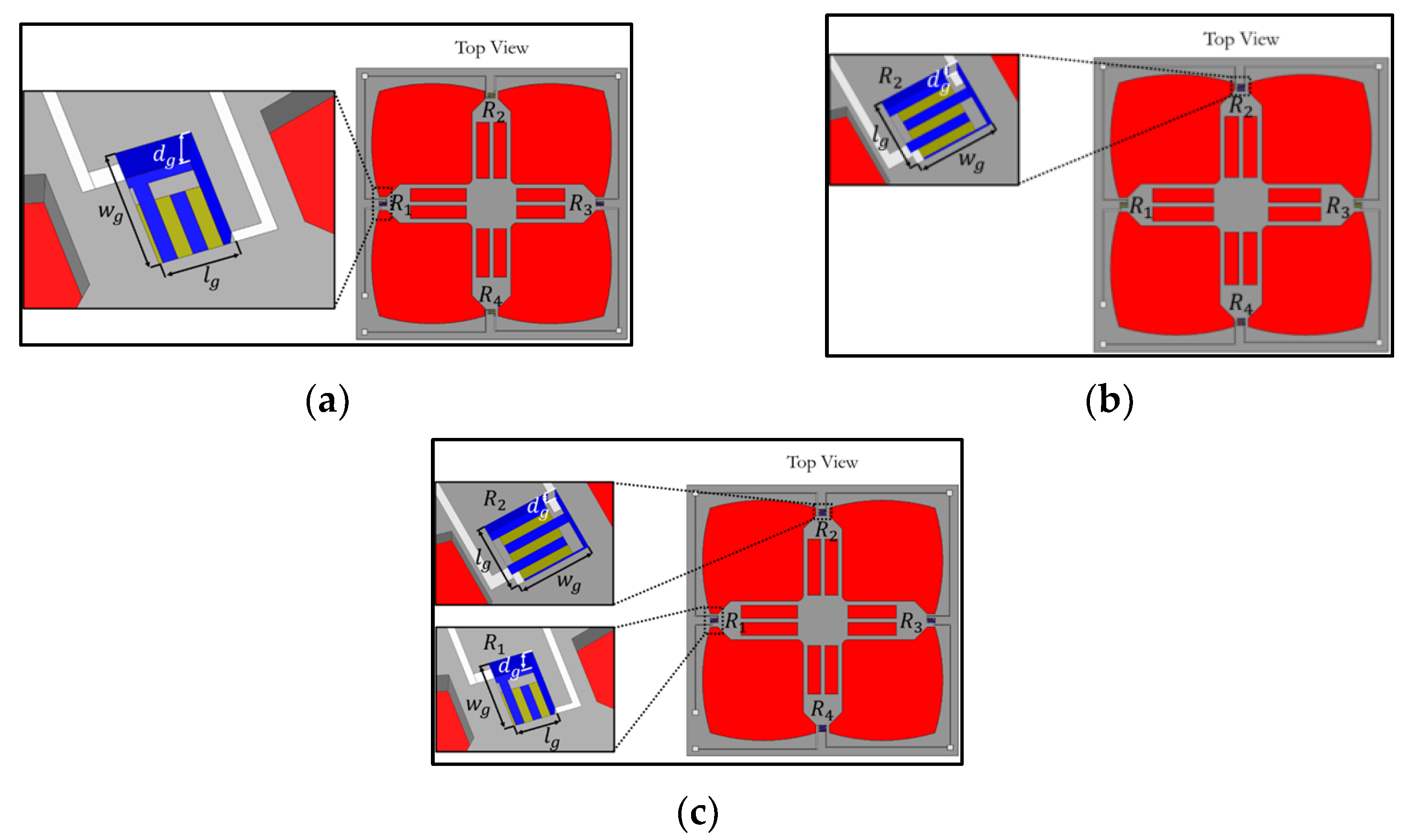
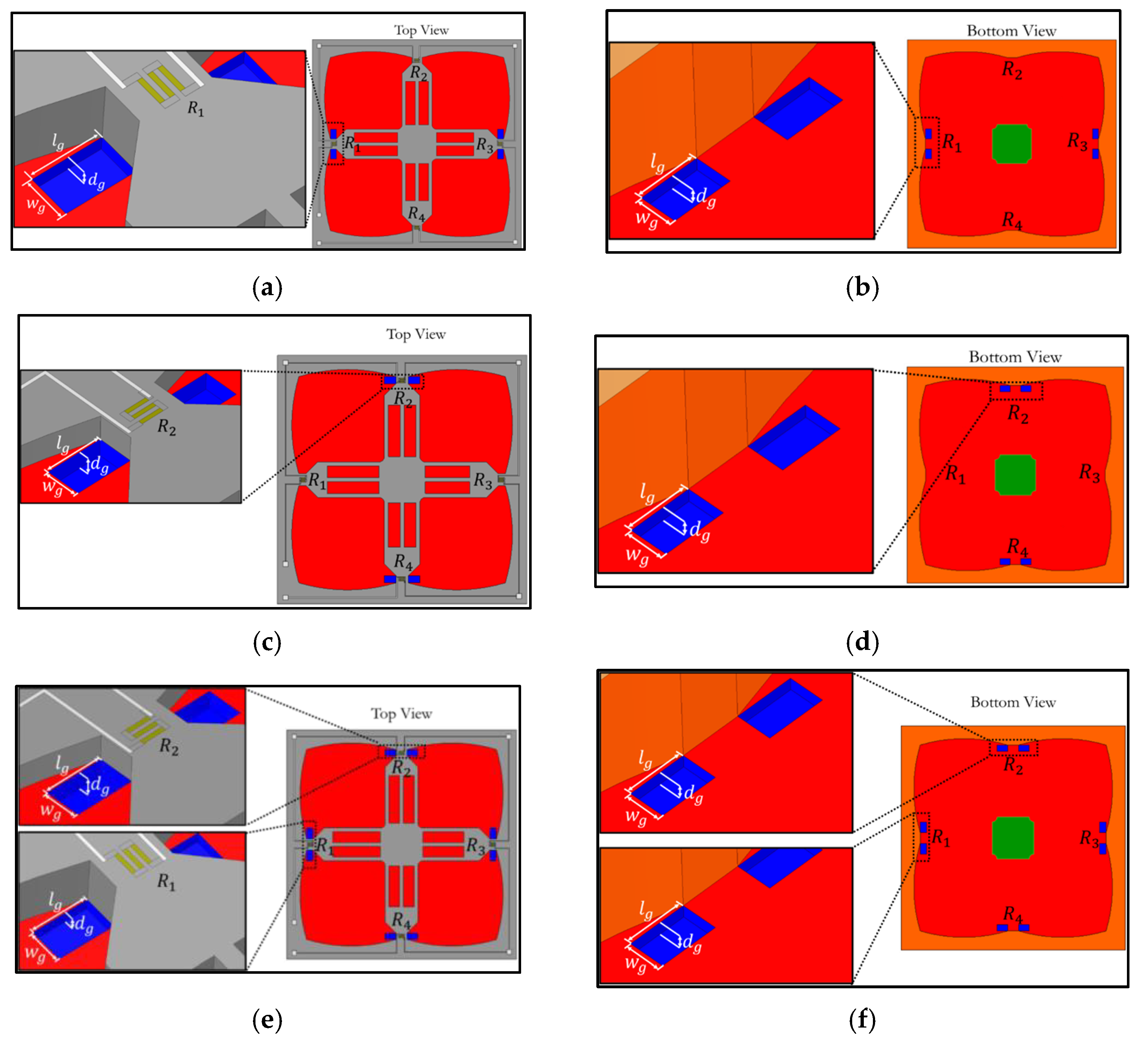
2.3. Groove Designs
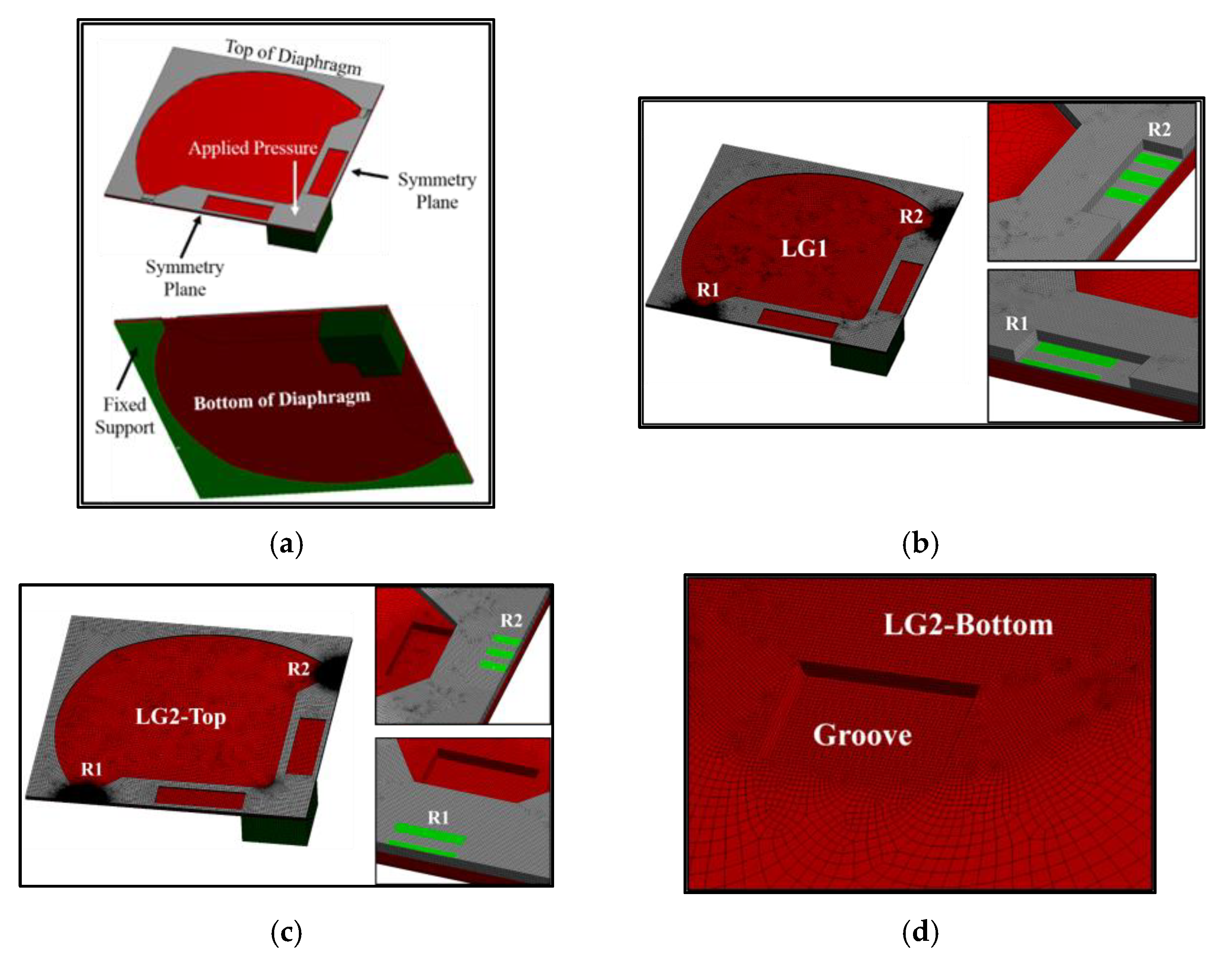
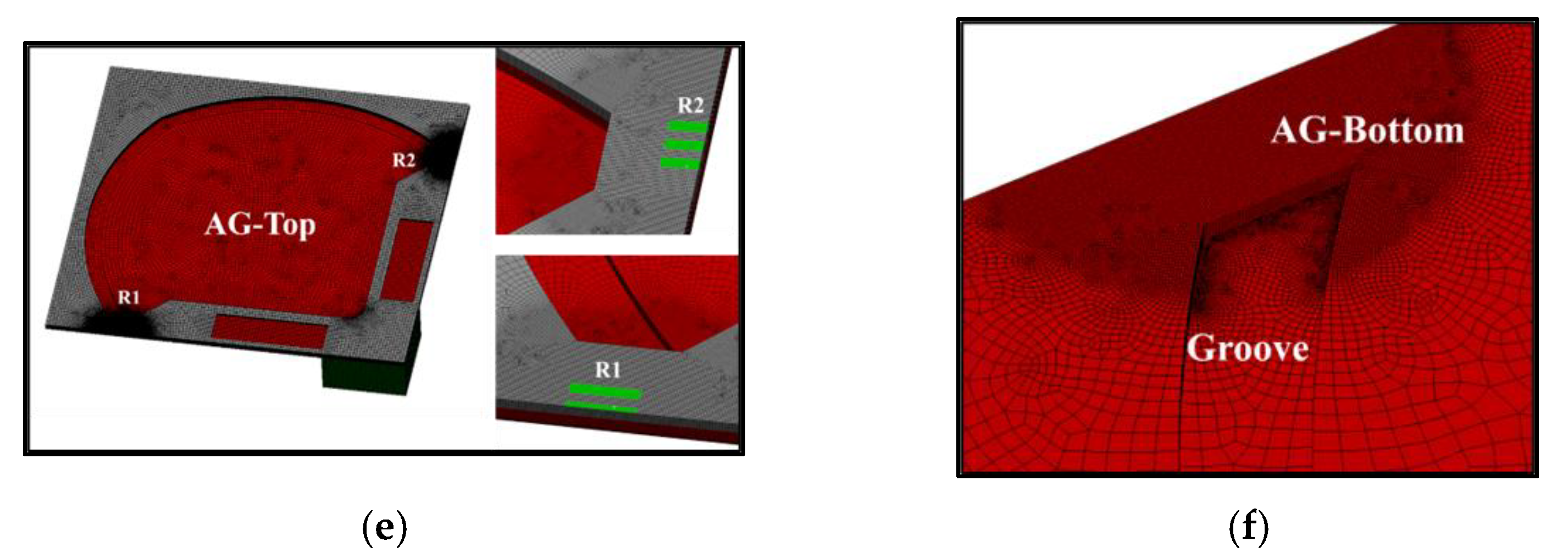
3. Finite Element Analysis
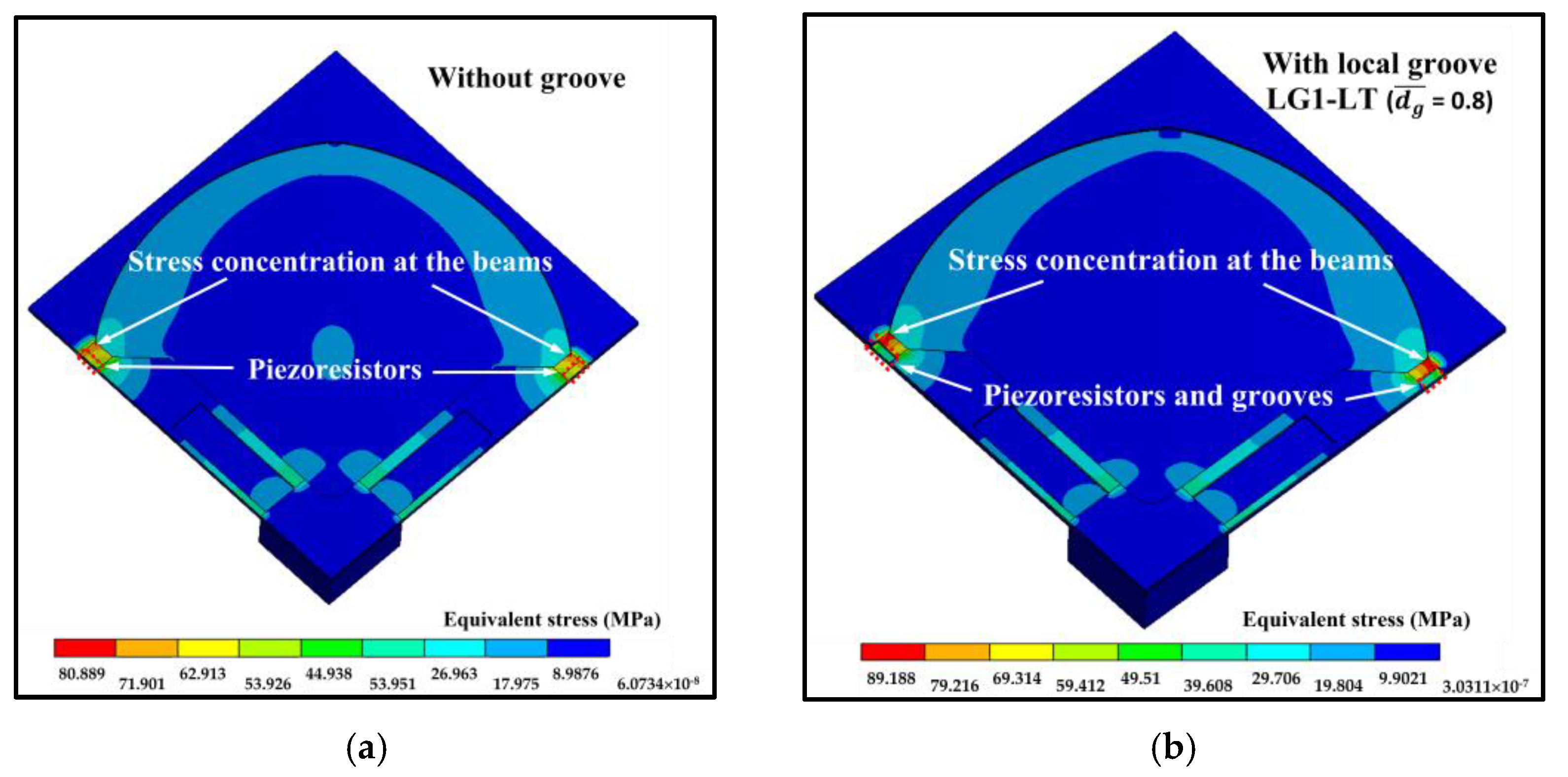
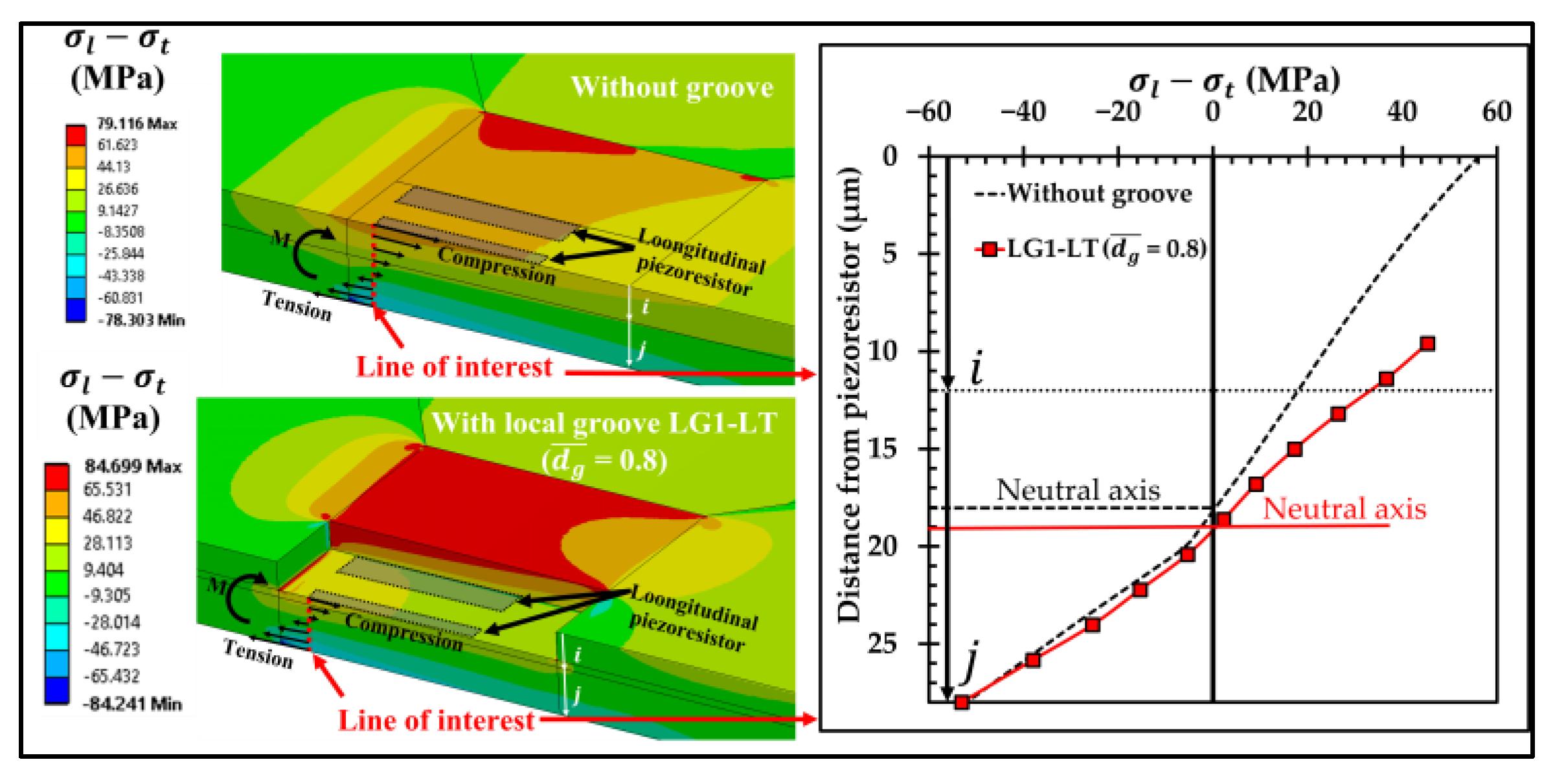
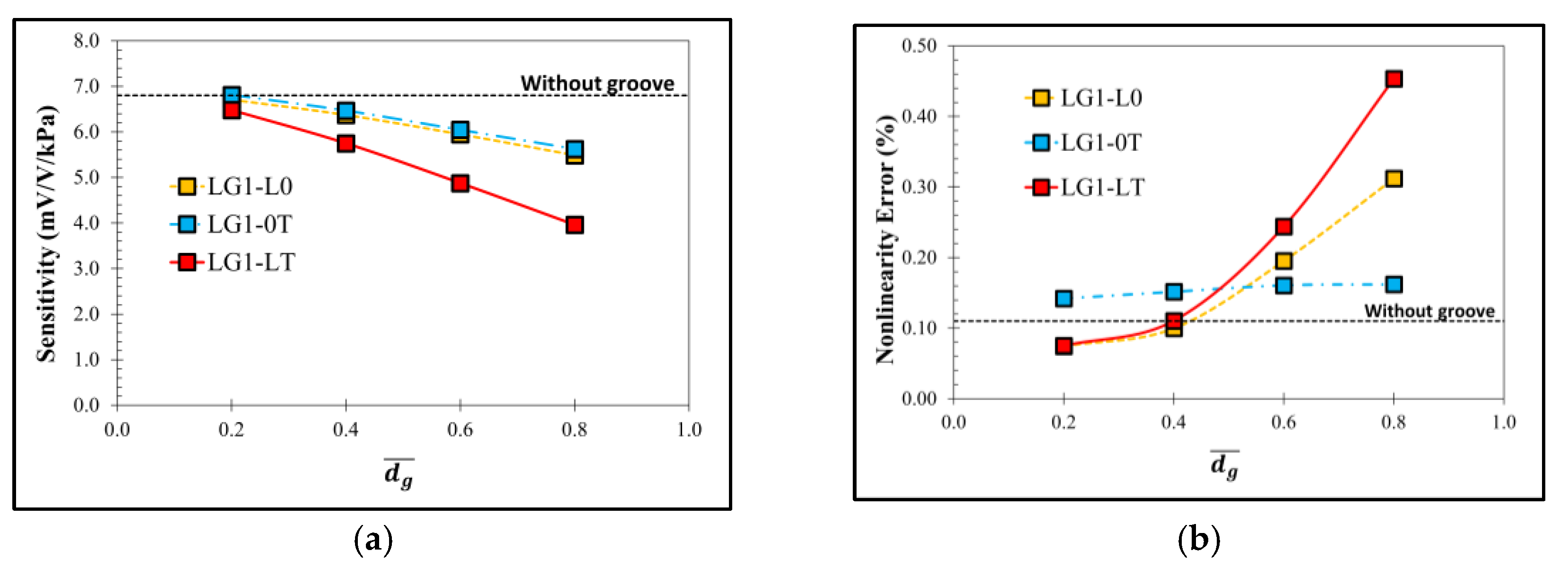
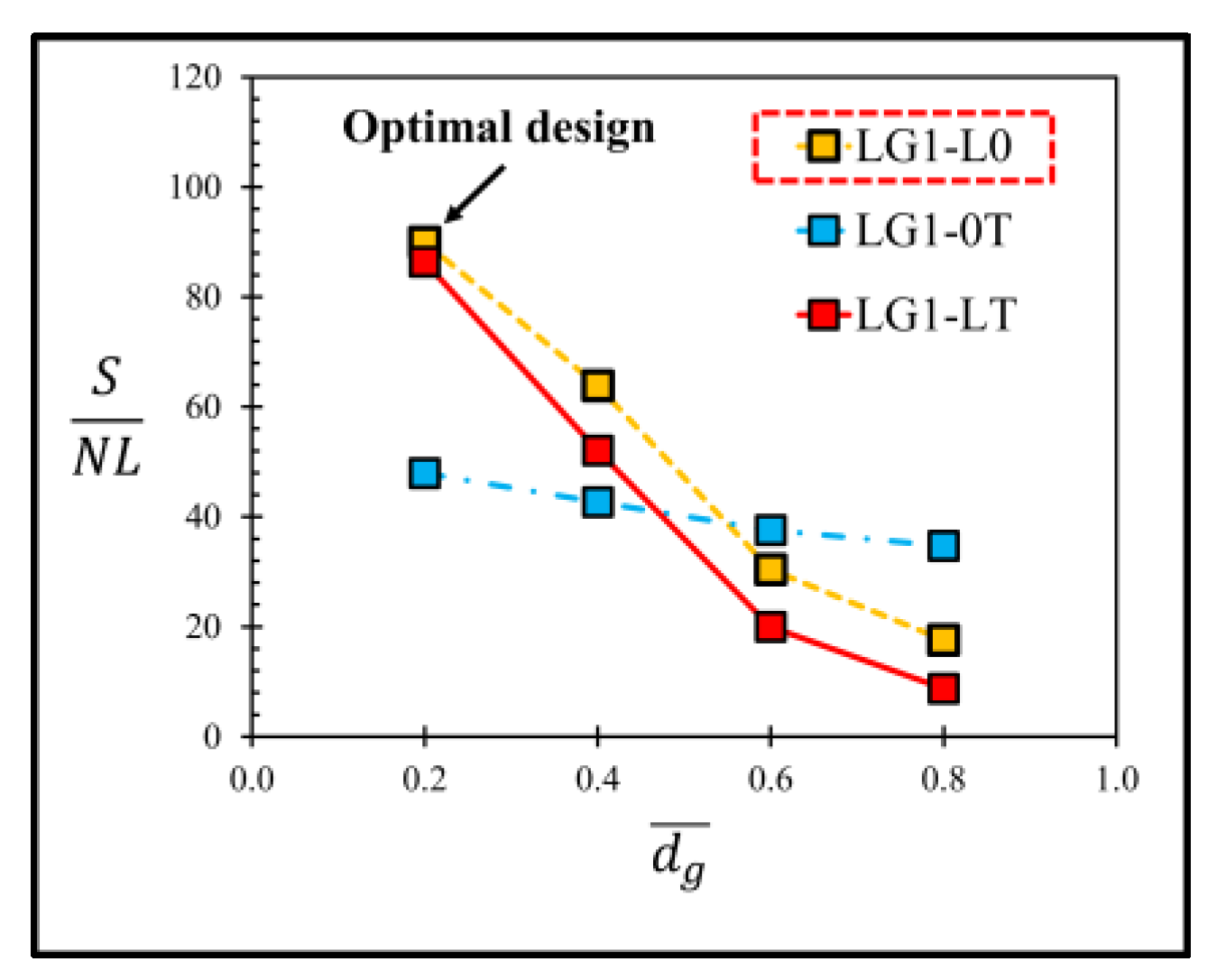
3.1. Stress Distribution of the Sensor with the Local Groove LG1
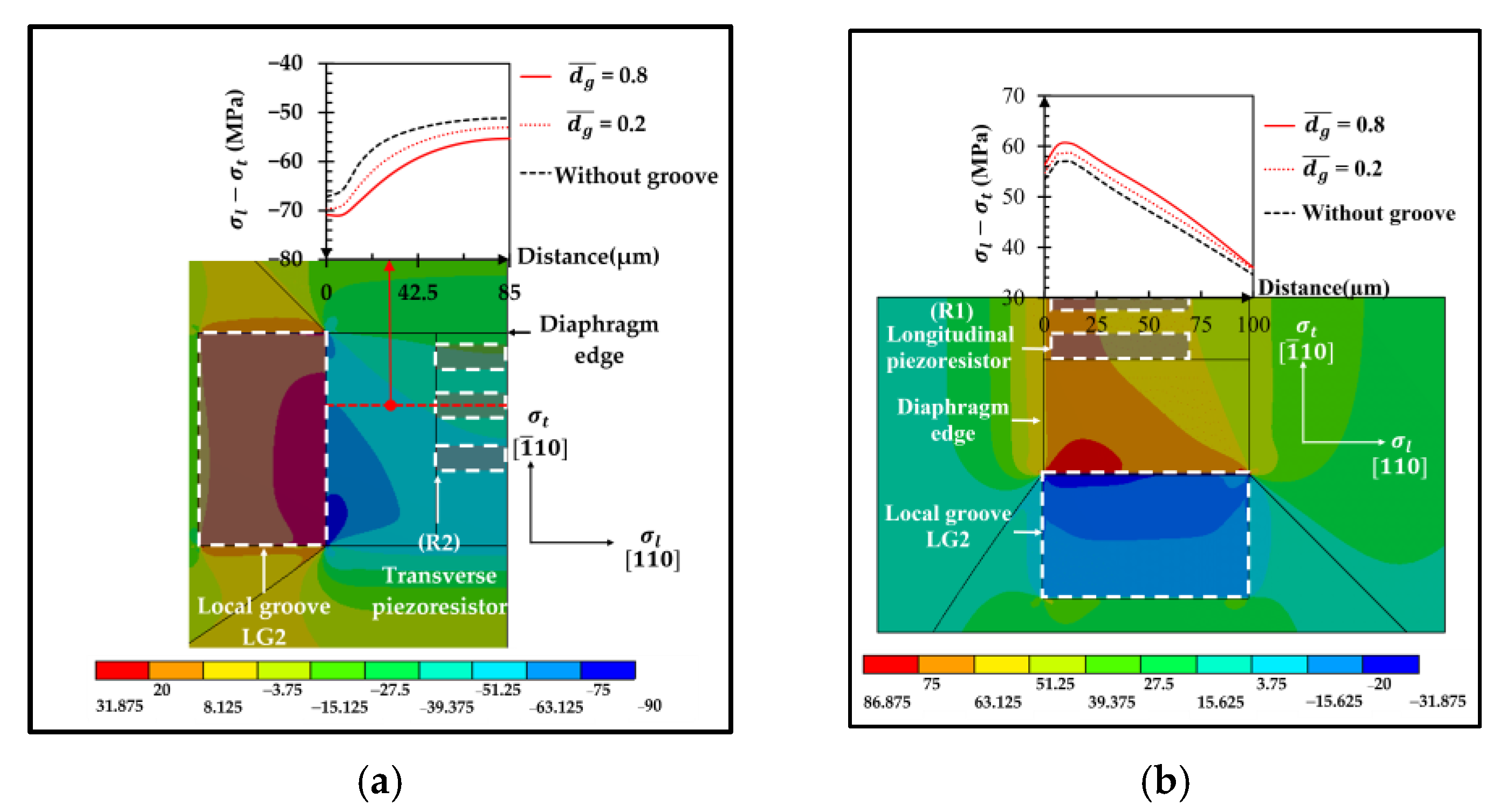
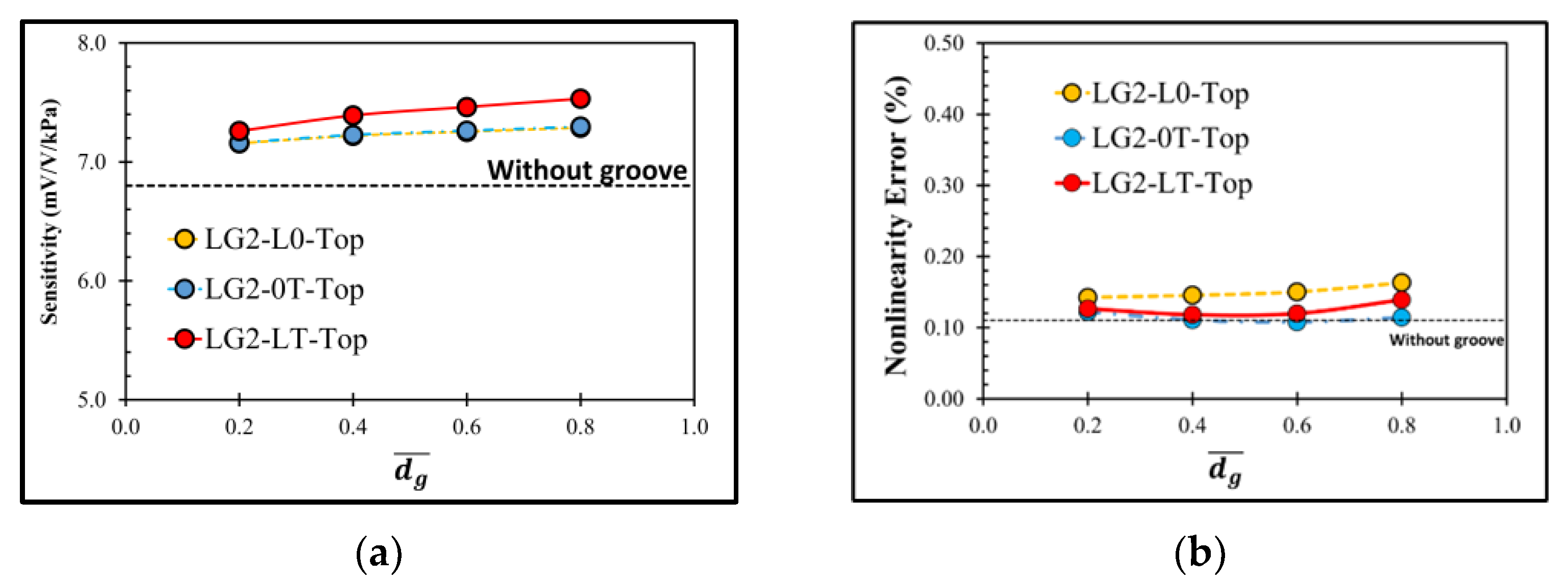
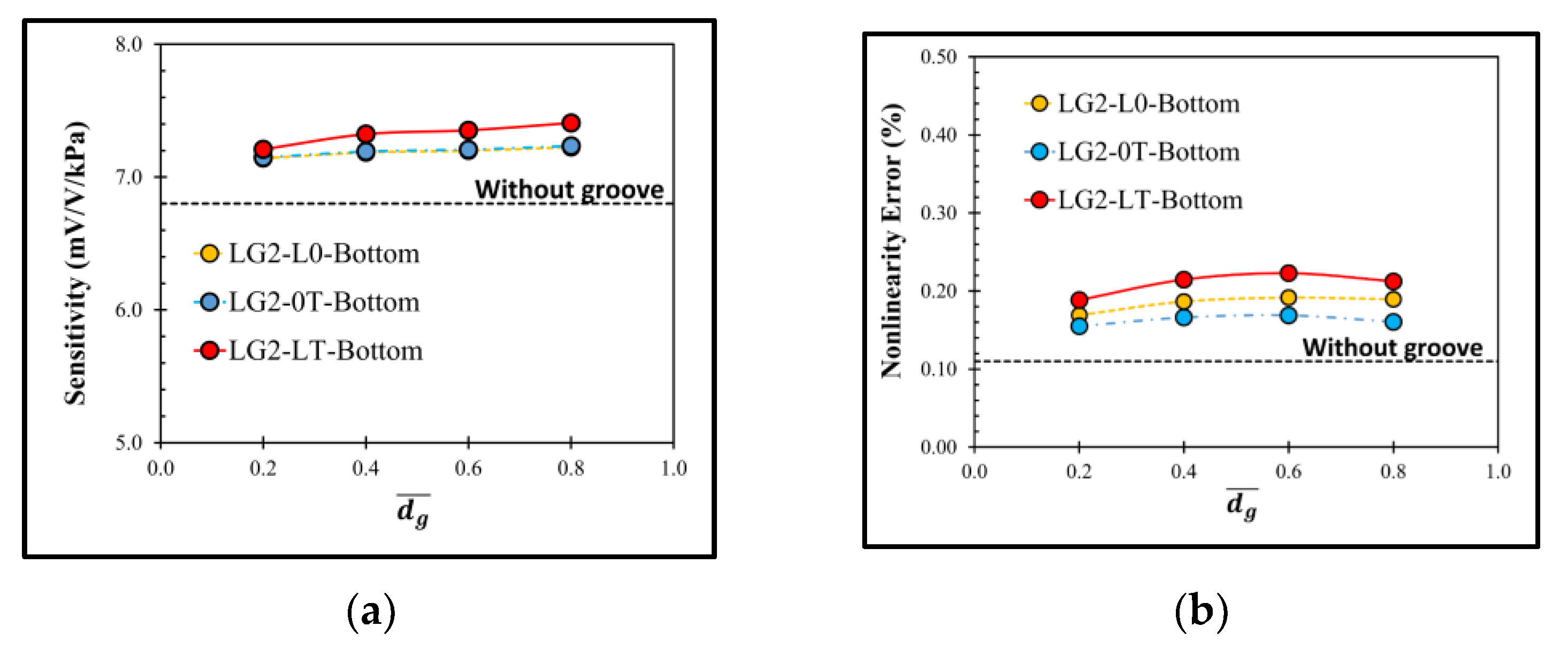
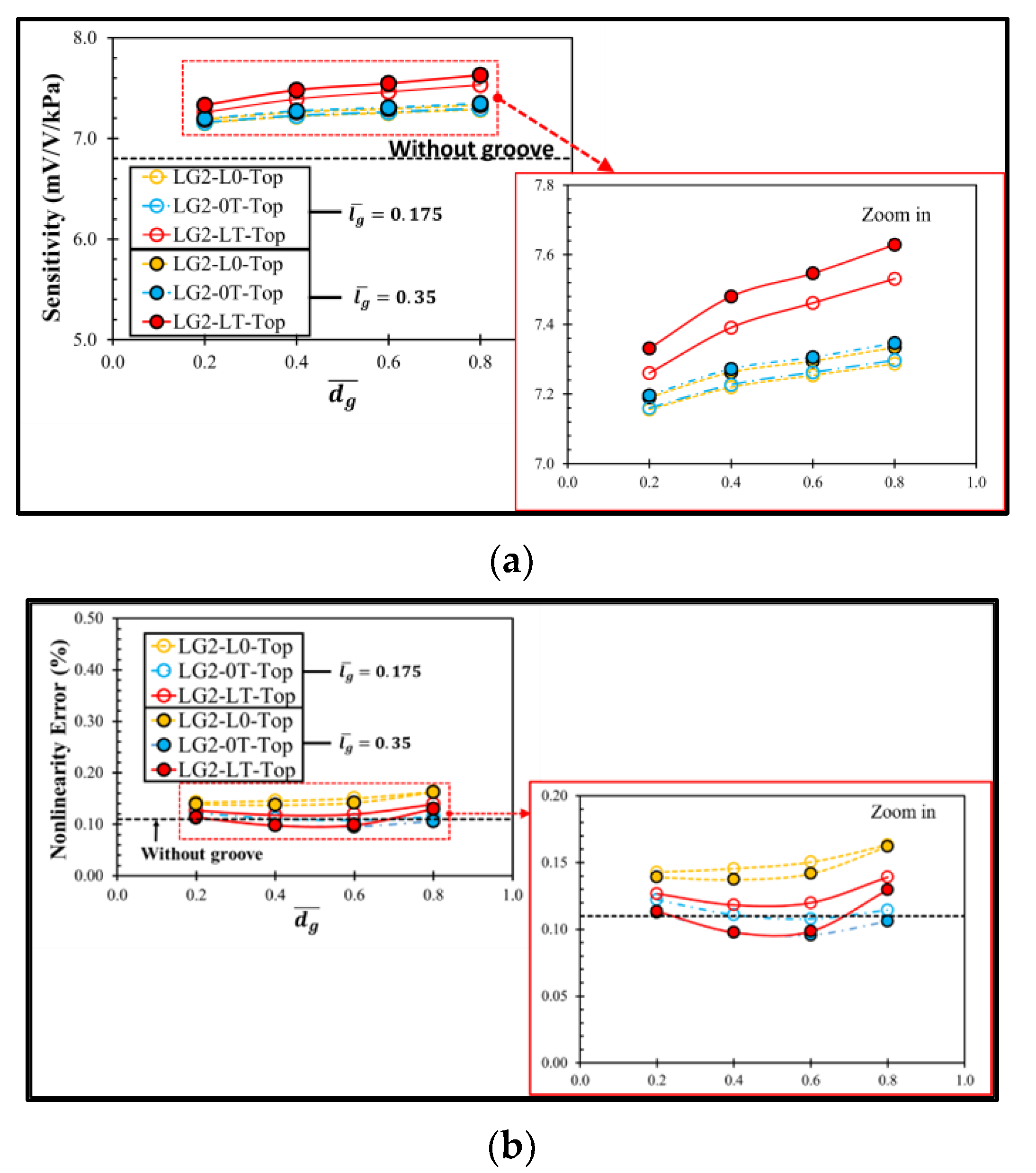
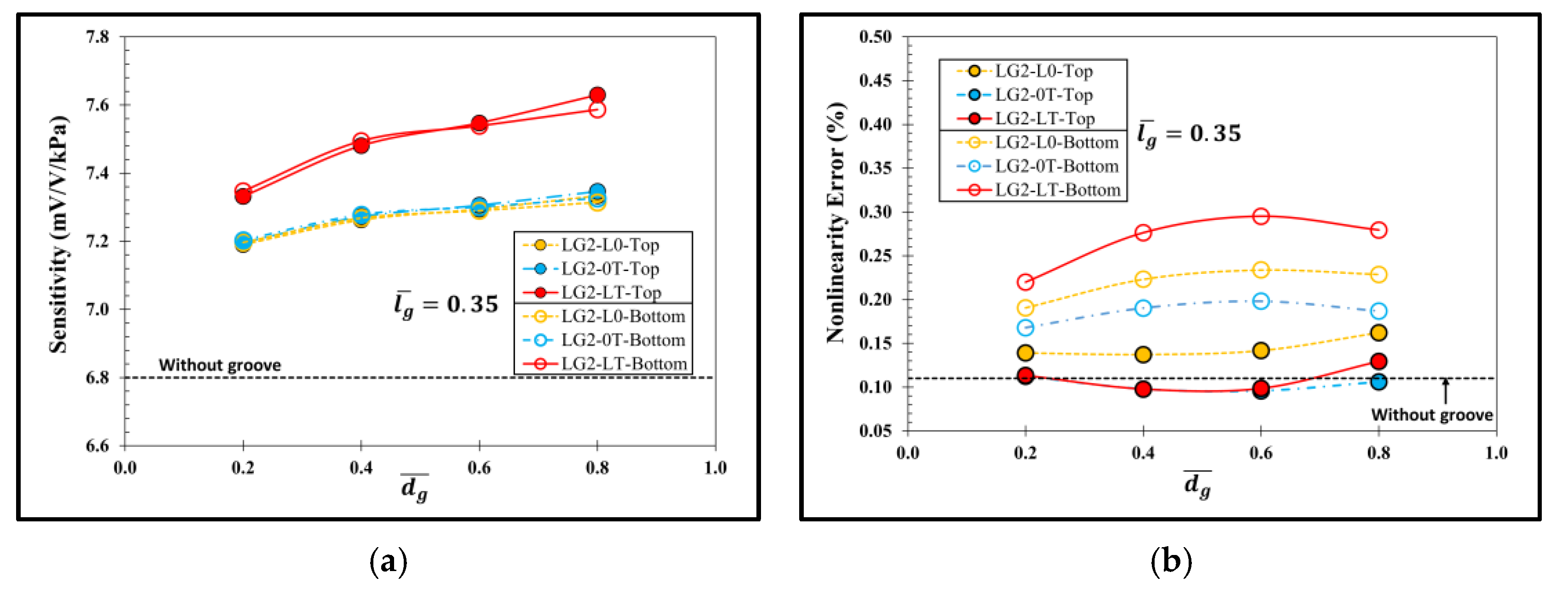
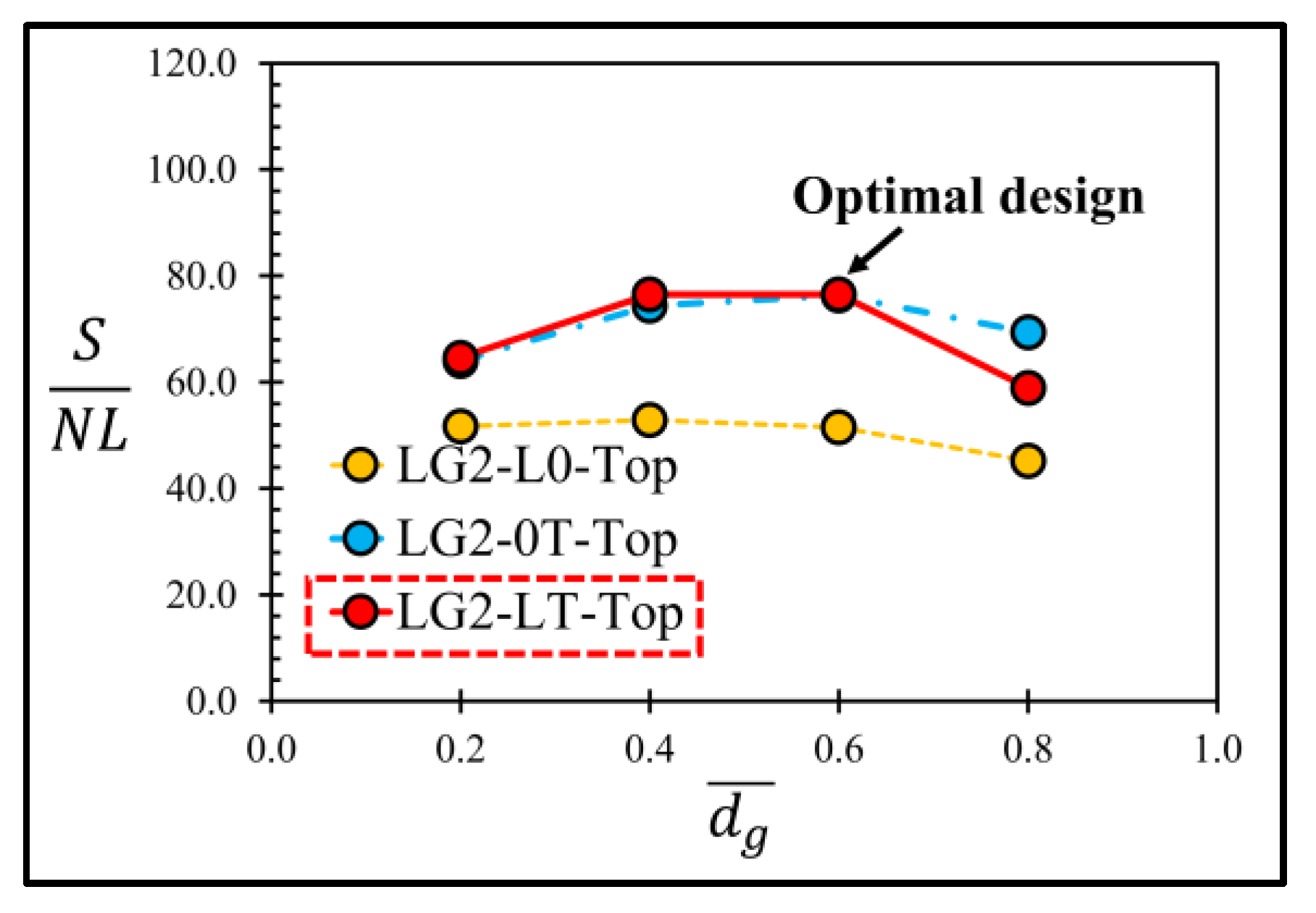
3.2. Stress Distribution of the Sensor with the Local Groove LG2
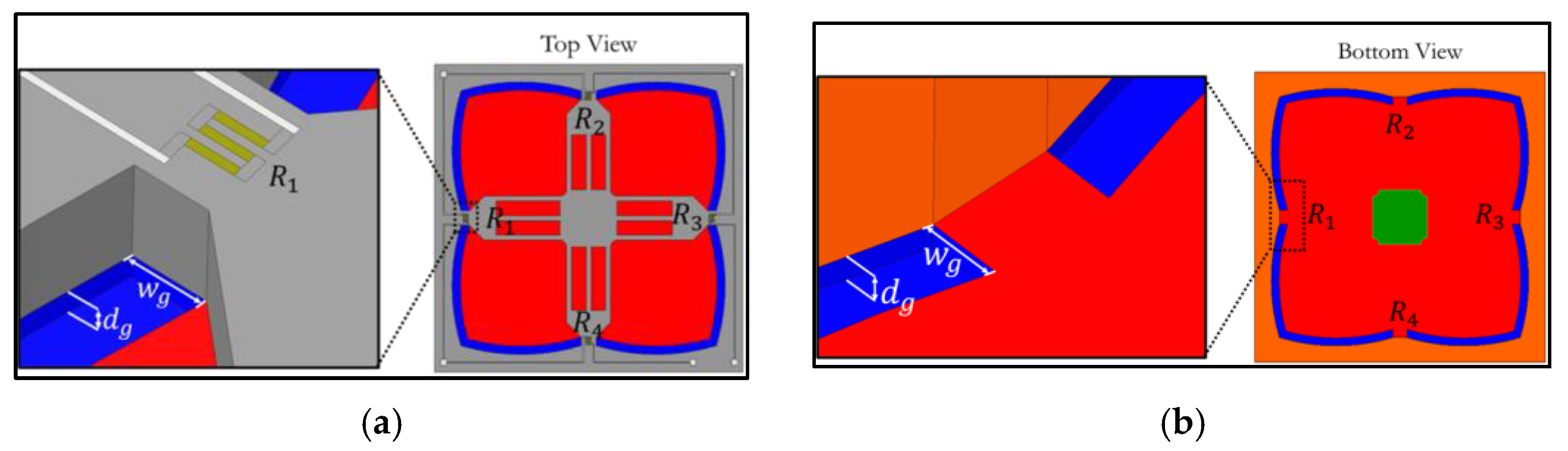
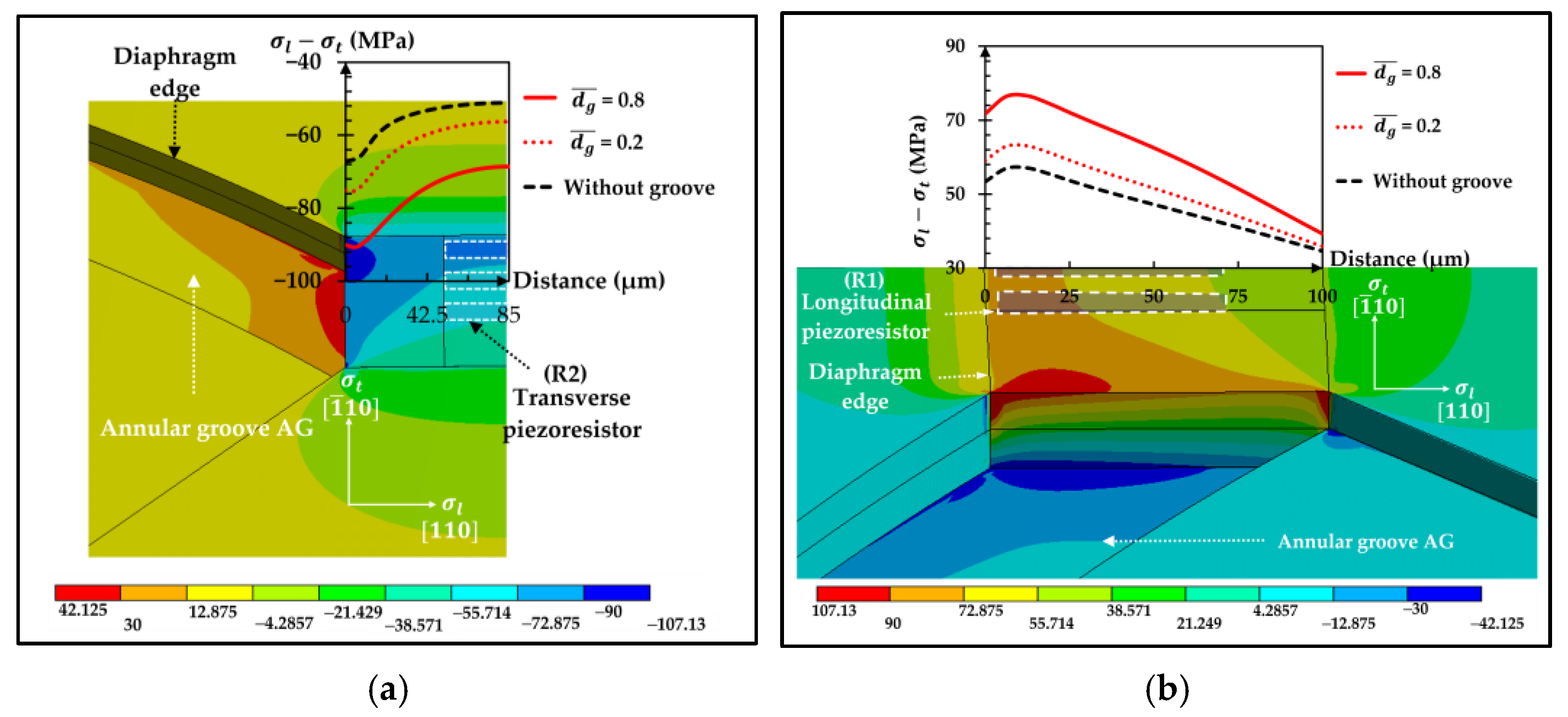
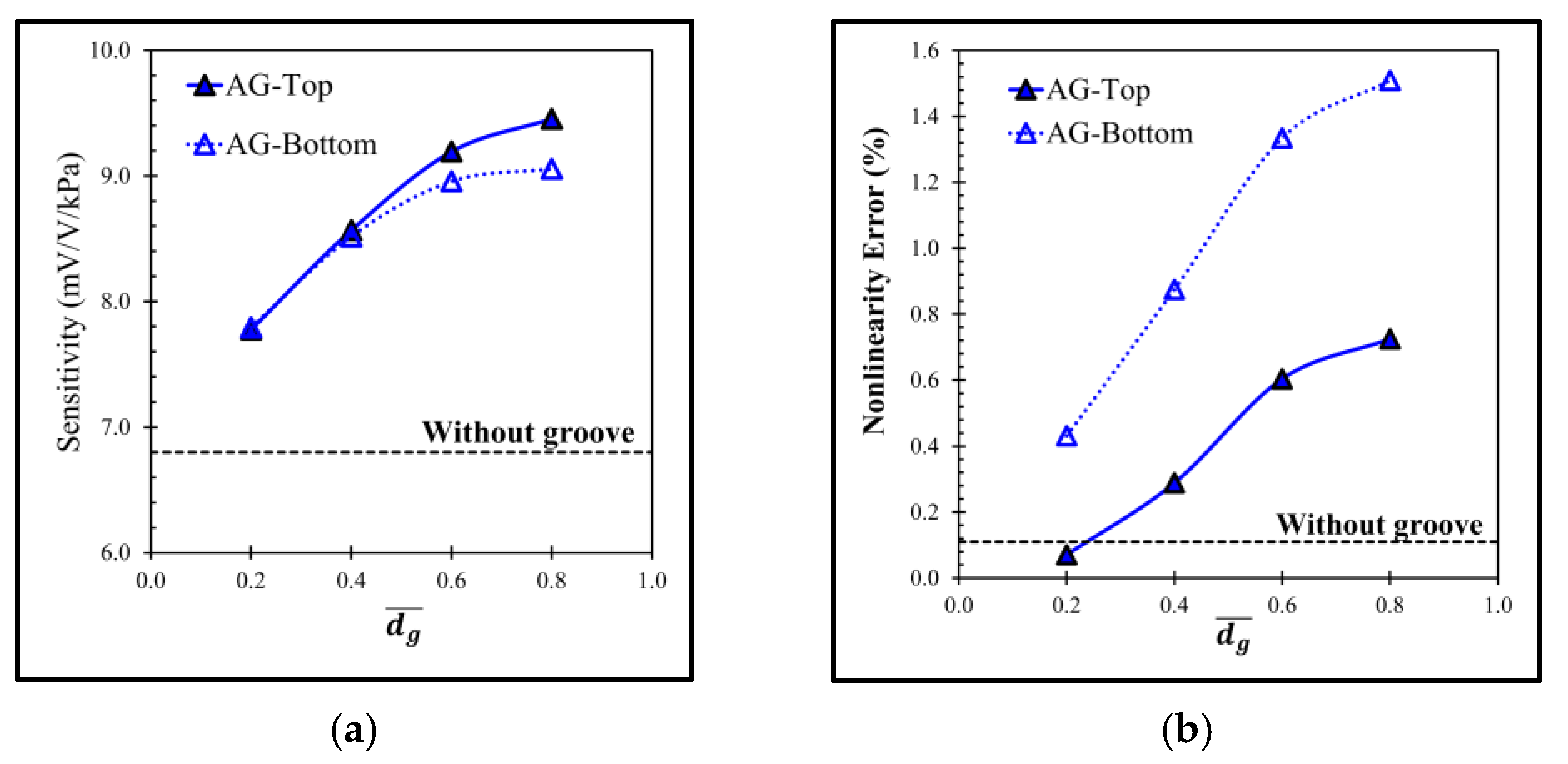
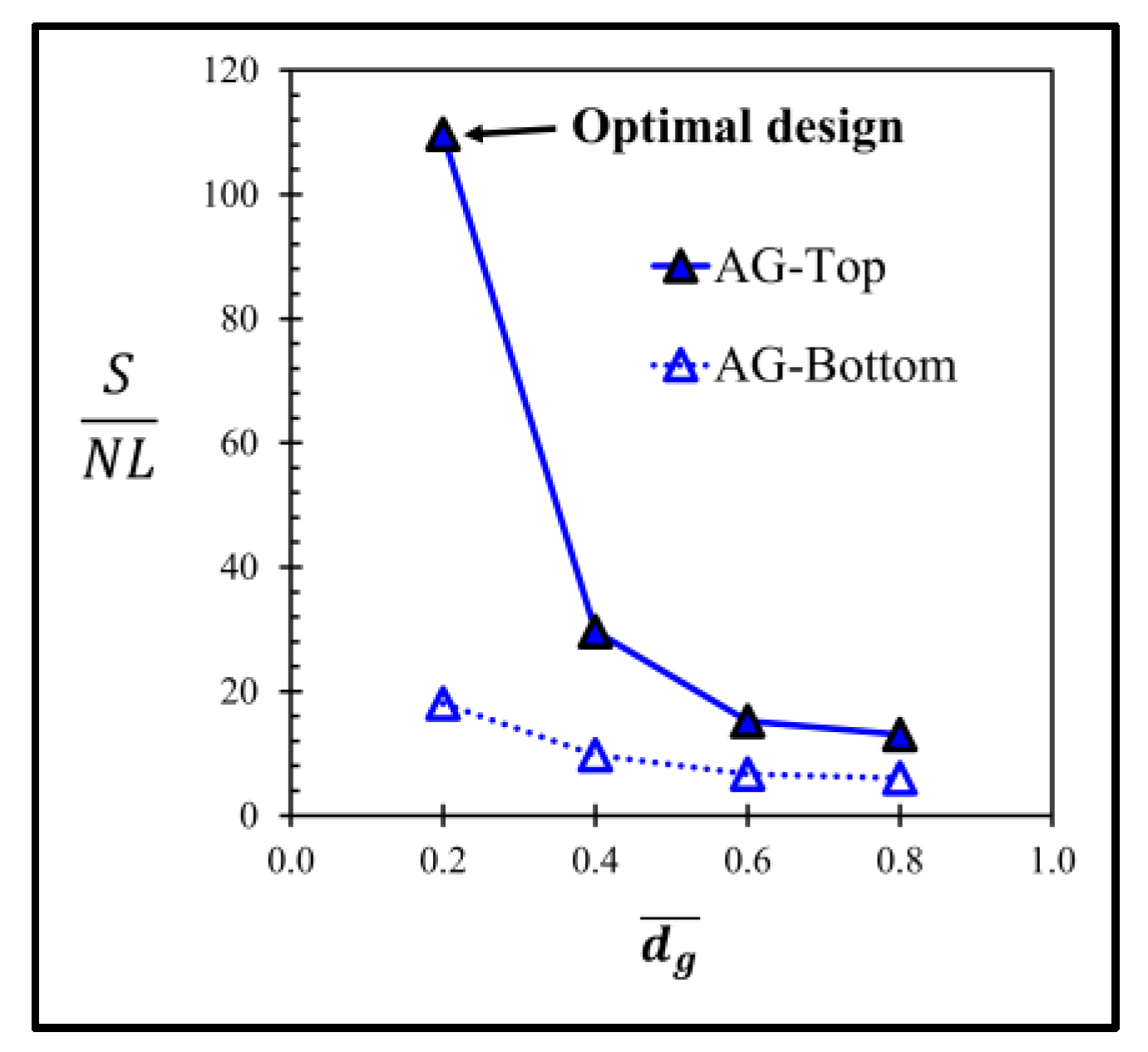
3.3. Stress Distribution of the Sensor with the Annular Groove AG
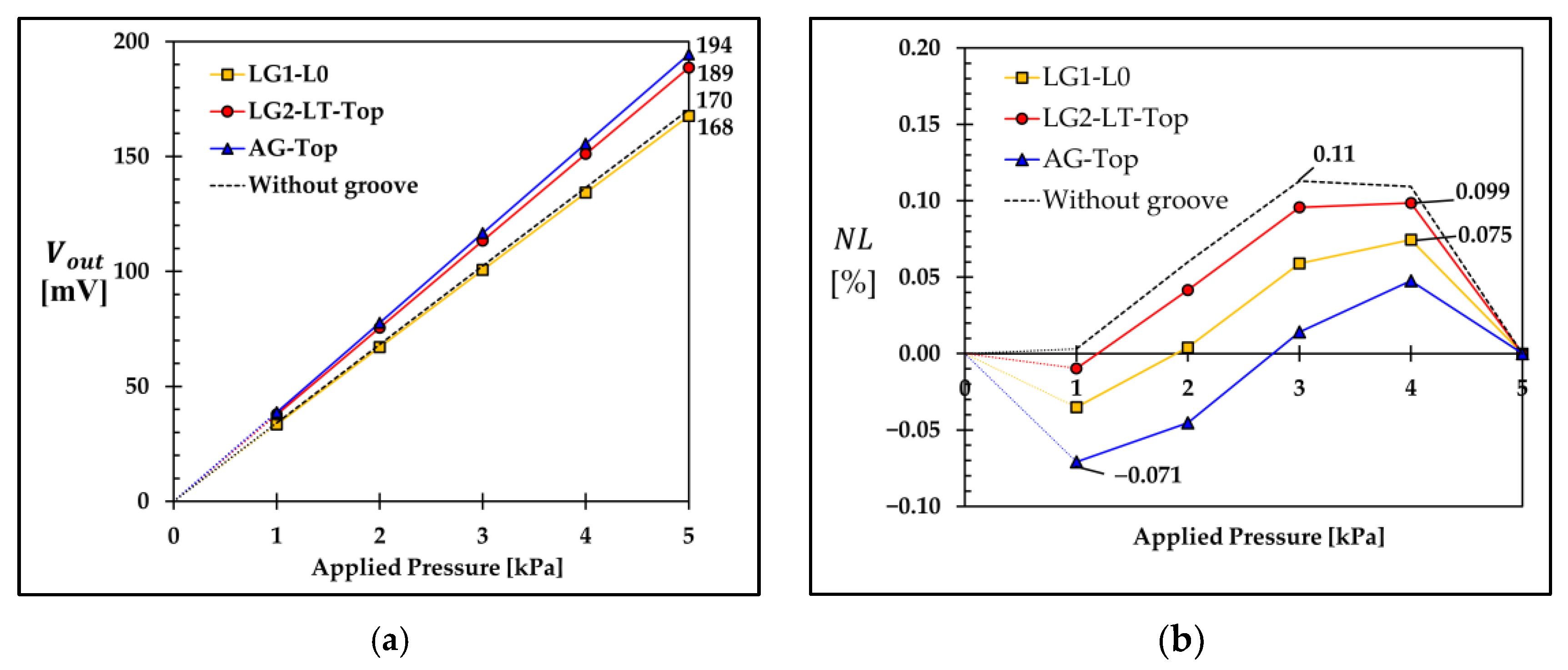
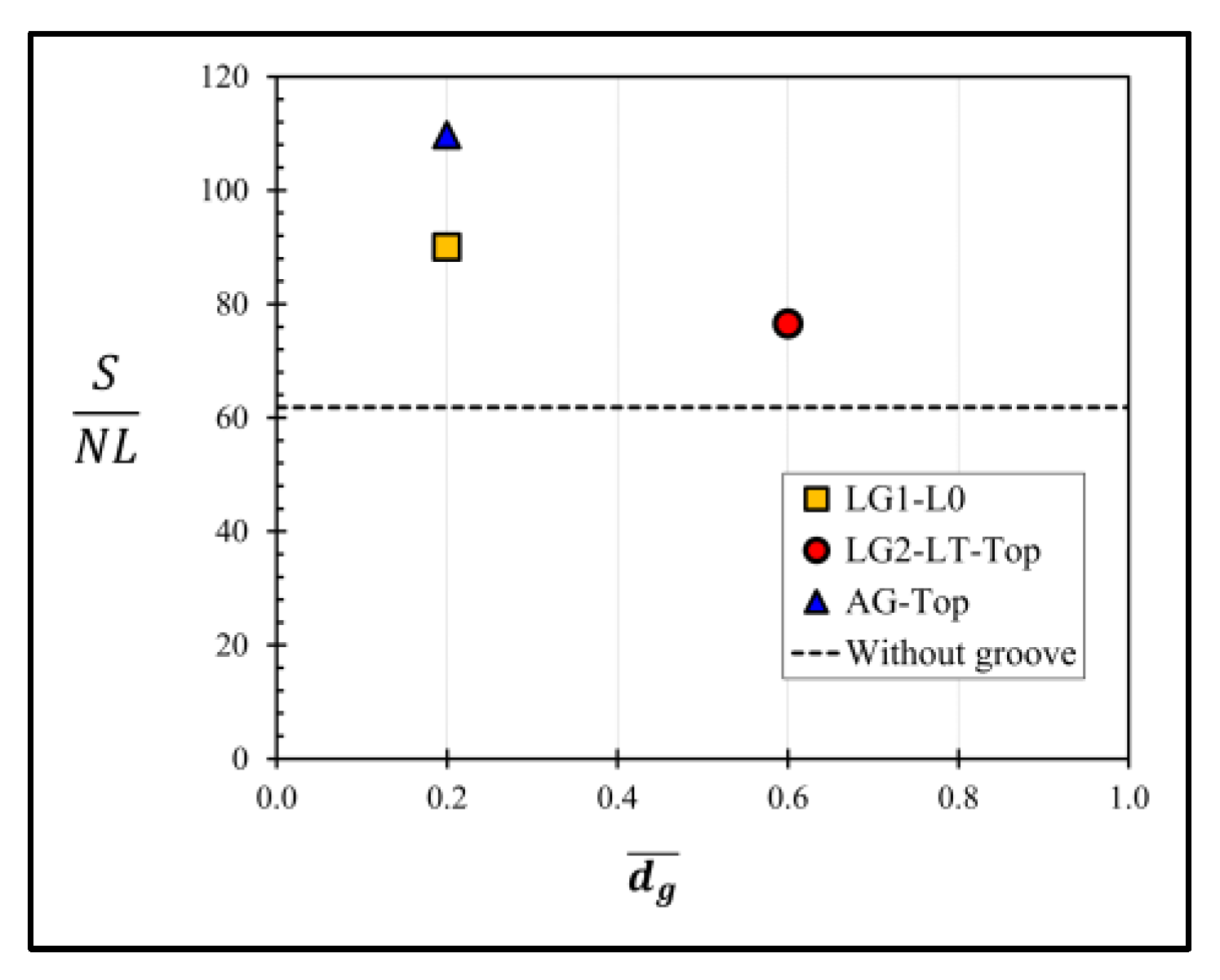
4. Groove Design Comparison
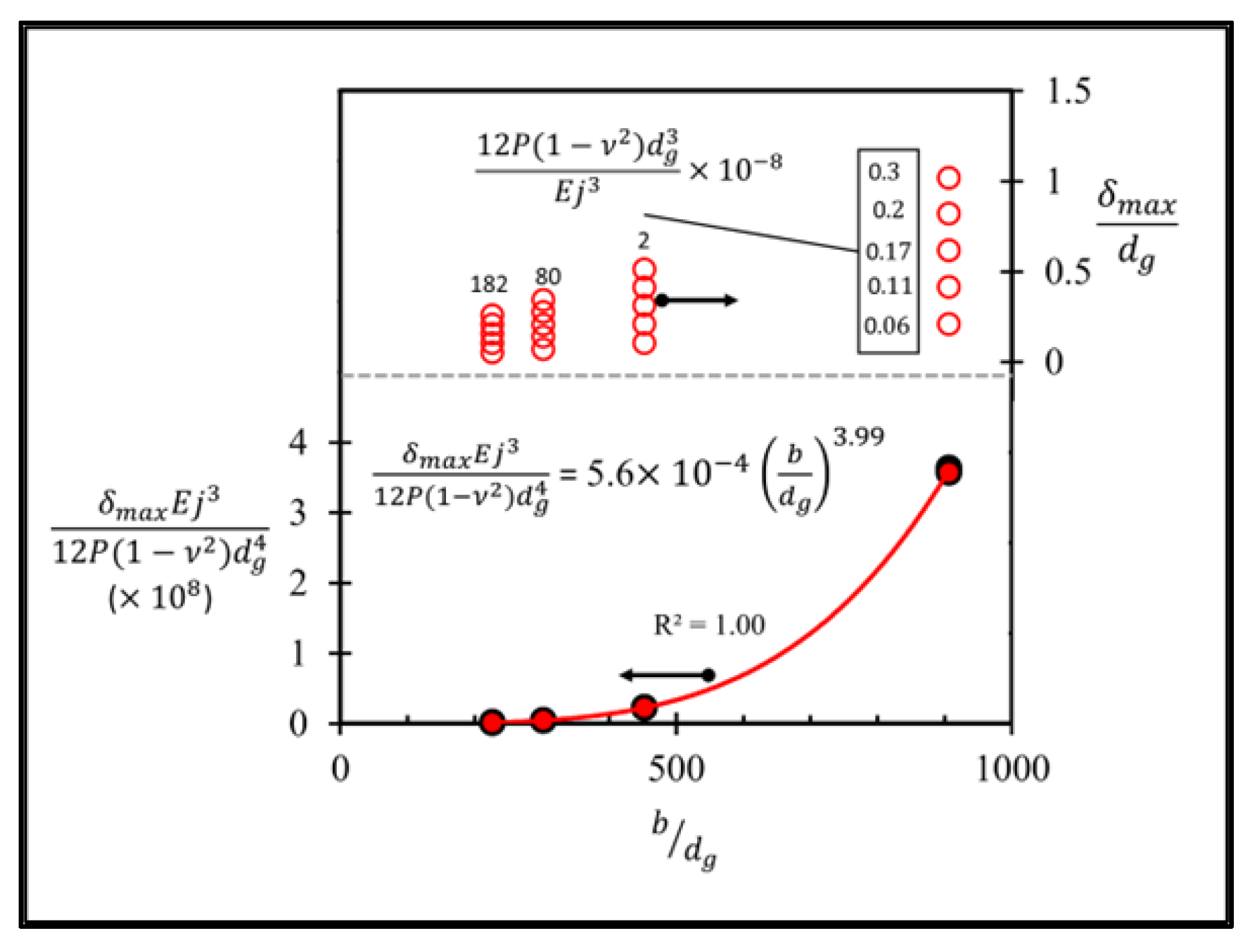
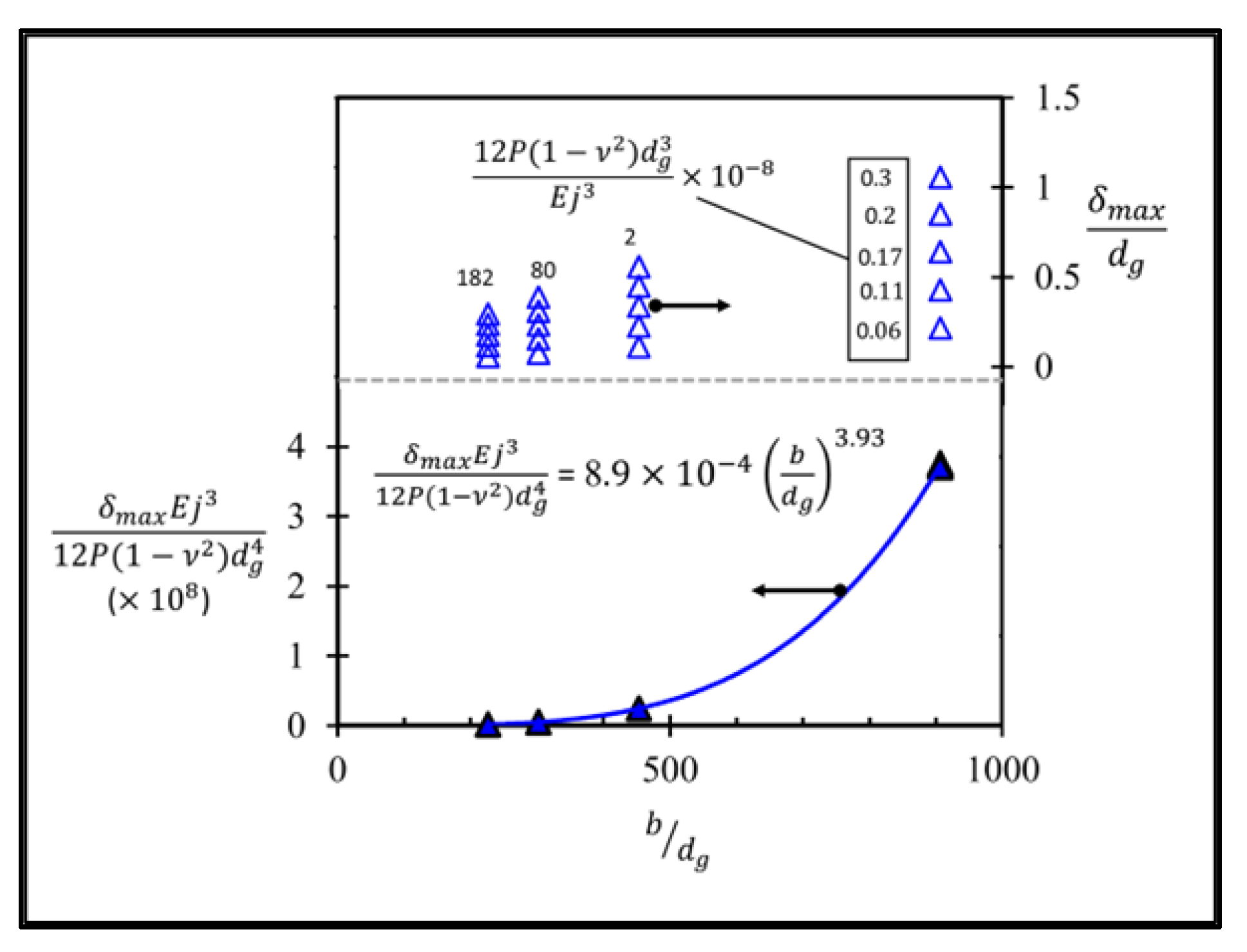
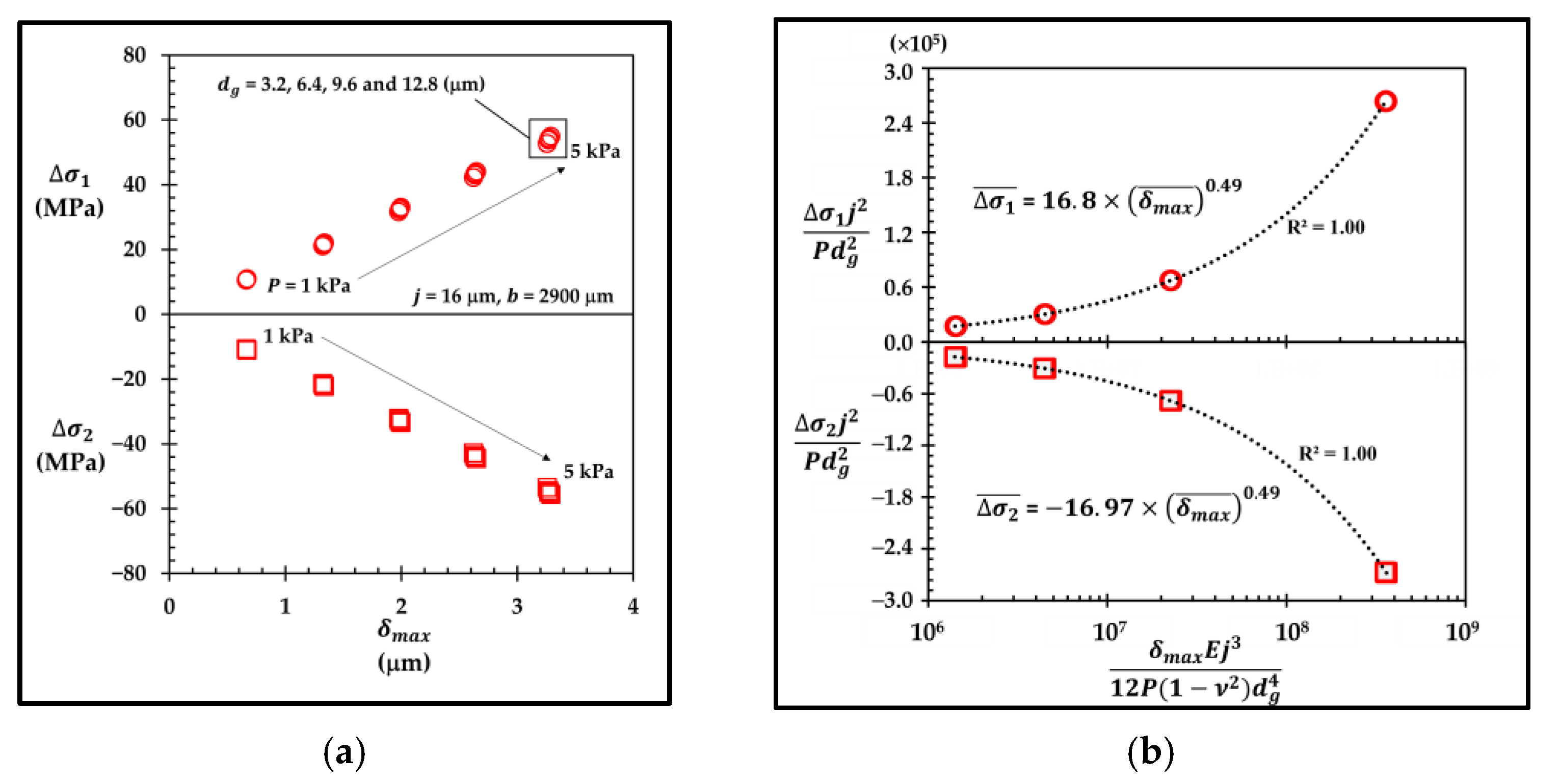
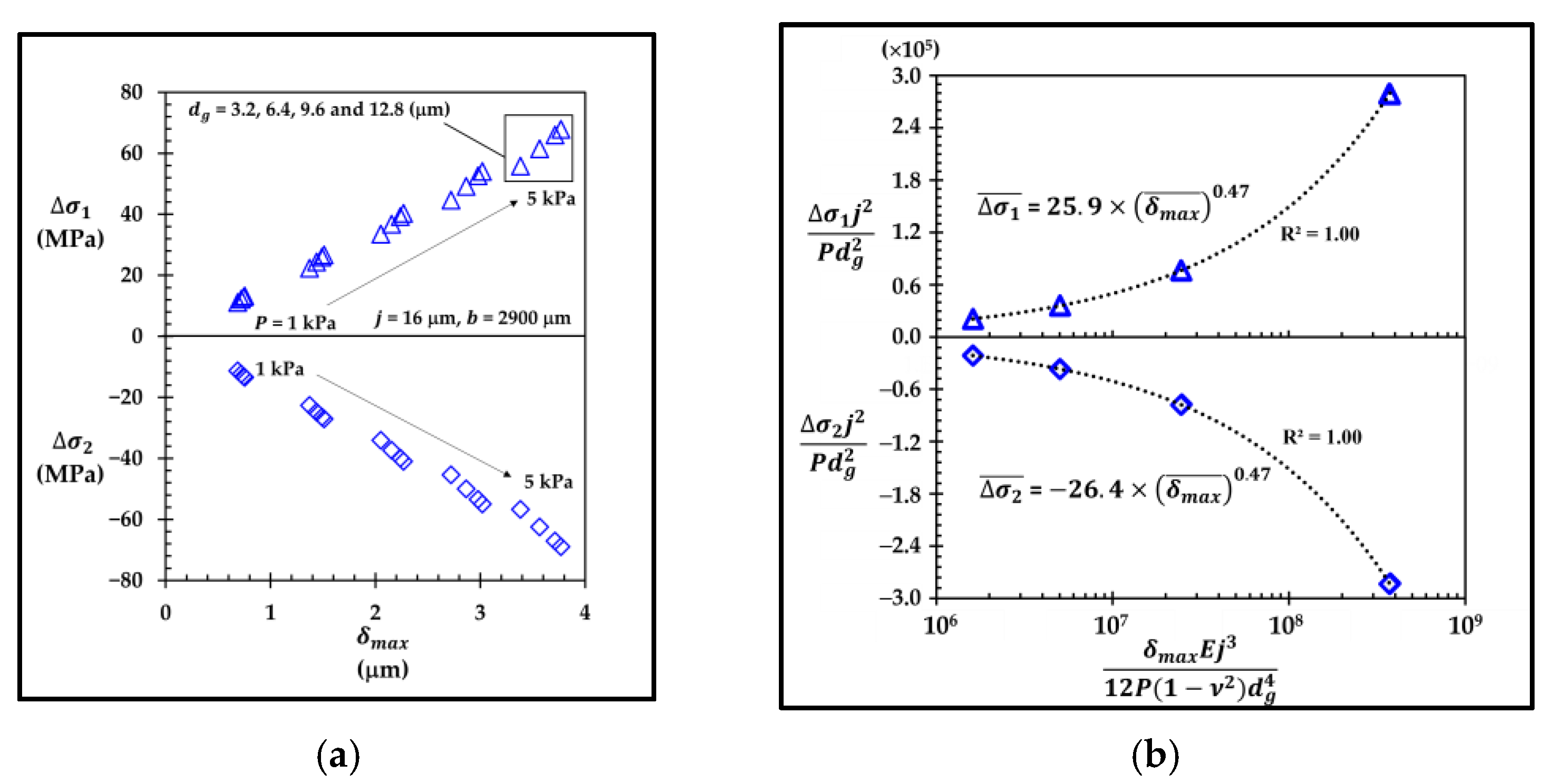
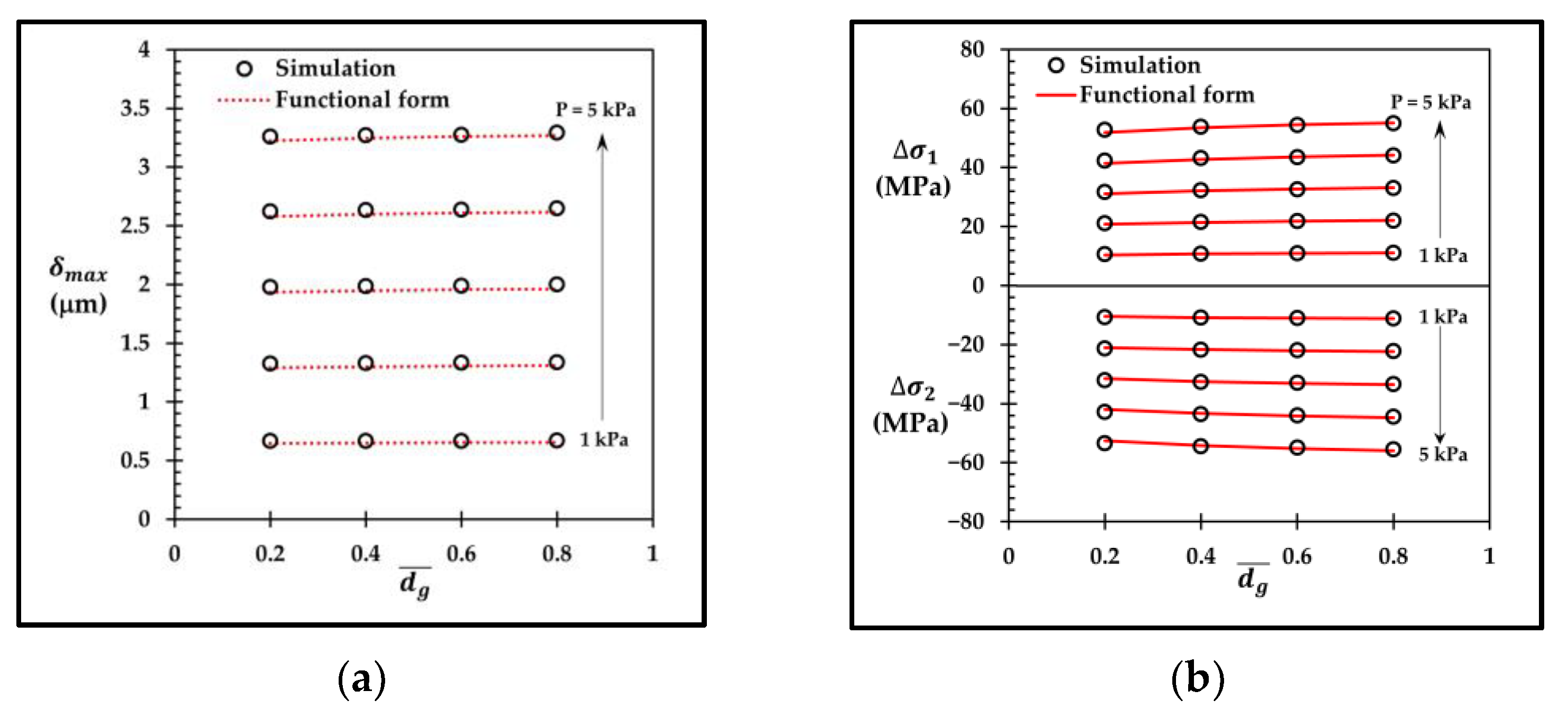
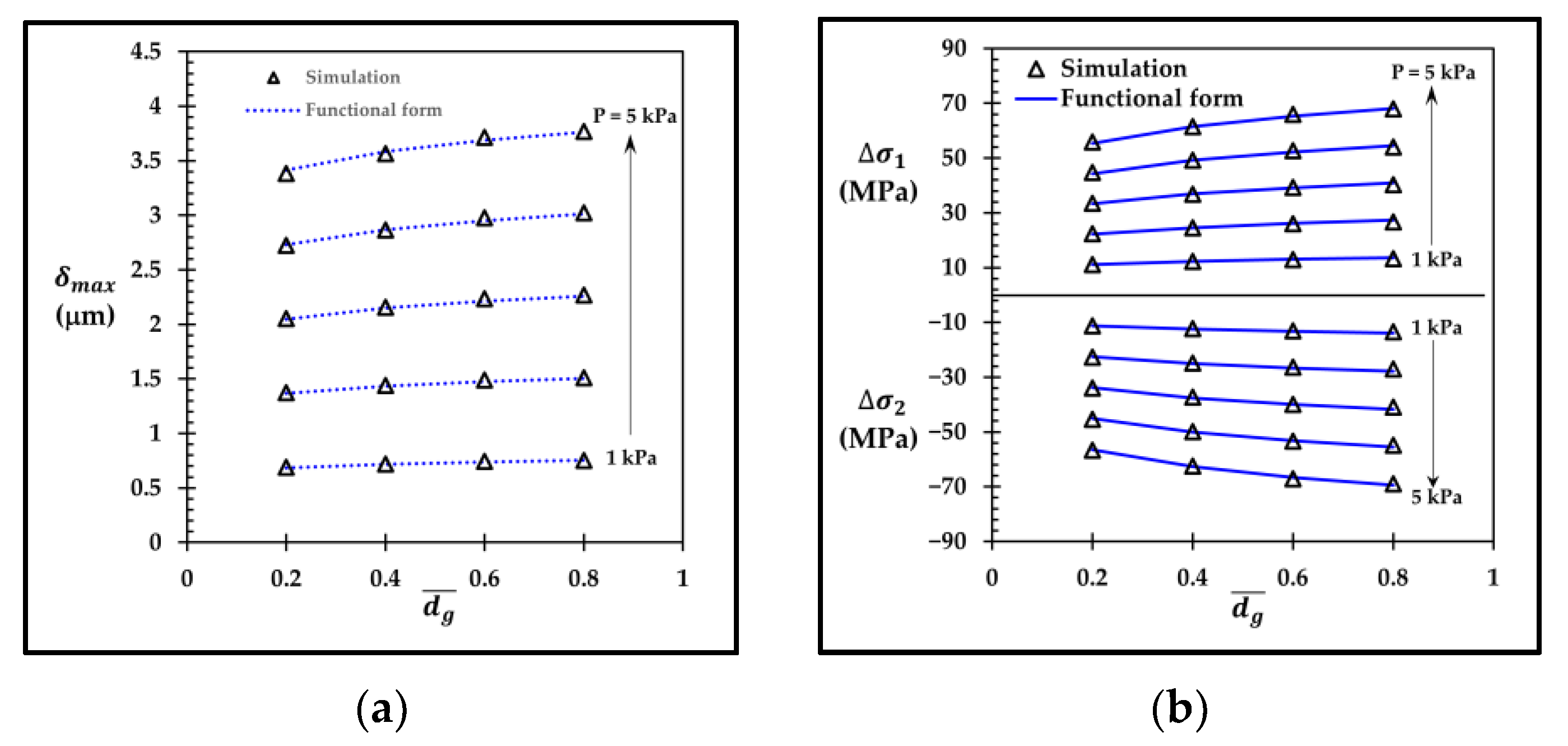
5. Functional Forms of Averaged Stress Difference and Maximum Deflection of Sensor with Groove
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bryzek, J.; Roundy, S.; Bircumshaw, B.; Chung, C.; Castellino, K. Marvelous MEMS. IEEE Circuits Devices Mag. 2006, 22, 8–28. [Google Scholar] [CrossRef]
- Kumar, S.S.; Pant, B.D. Design principles and considerations for the ‘ideal’ silicon piezoresistive pressure sensor: A focused review. Microsyst. Technol. 2014, 20, 1213–1247. [Google Scholar] [CrossRef]
- Bogue, R. Recent developments in MEMS sensors: A review of applications, markets and technologies. Sens. Rev. 2013, 33, 300–304. [Google Scholar] [CrossRef]
- Flemimg, W.J. Overview of automotive sensors. IEEE Sens. J. 2001, 1, 296–308. [Google Scholar] [CrossRef] [Green Version]
- Jena, S.; Gupta, A.; Pipapara, R.K.; Pal, P.; Adit. Wireless sensing systems: A review. In Sensors for Automotive and Aerospace Applications, 1st ed.; Springer: Singapore, 2019; pp. 143–192. [Google Scholar]
- Takahashi, H.; Matsumoto, K.; Shimoyama, I. Differential pressure distribution measurement of a free-flying butterfly wing. In Proceedings of the 2011 16th International Solid-State Sensors, Actuators and Microsystems Conference, Beijing, China, 5–9 June 2011. [Google Scholar]
- Berns, A.; Buder, U.; Obermeier, E.; Wolter, A.; Leder, A. Aero MEMS sensor array for high-resolution wall pressure measurements. Sens. Actuators A: Phys. 2006, 132, 104–111. [Google Scholar] [CrossRef]
- Marco, S.; Samitier, J.; Ruiz, O.; Morante, J.R.; Steve, J.E. High performance piezoresistive pressure sensors for biomedical applications using very thin structured membrane. Meas. Sci. Technol. 1996, 7, 1195–1203. [Google Scholar] [CrossRef]
- Ziaie, B.; Najafi, K. An implantable microsystem for tonometric blood pressure measurement. Biomed. Microdevices 2001, 3, 285–292. [Google Scholar] [CrossRef]
- Ding, D.; Cooper, R.A.; Pasquina, P.F.; Pasquina, L.F. Sensor technology for smart homes. Maturitas 2011, 69, 131–136. [Google Scholar] [CrossRef]
- Li, L.; Belov, N.; Klitzke, M.; Park, J.S. High Performance Piezoresistive Low Pressure Sensors. In Proceedings of the 2016 IEEE Sensors, Orlando, FL, USA, 30 October–3 November 2016. [Google Scholar]
- MEMS Pressure Sensors—Technology and Market Trends 2021. Available online: https://s3.i-micronews.com/uploads/2021/04/YINTR21183-MEMS-Pressure-Sensors-Technology-and-Market-Trends-2021.pdf (accessed on 5 October 2021).
- Jena, S.; Gupa, A. Review on pressure sensor: A perspective from mechanical to micro-electro-mechanical systems. Sens. Rev. 2021, 41, 320–329. [Google Scholar] [CrossRef]
- Bao, M. Capacitive sensing and effects of electrical excitation. In Analysis and Design Principles of MEMS Devices, 1st ed.; Elsevier B.V.: Amsterdam, The Netherlands, 2005; pp. 213–245. [Google Scholar]
- Zhang, Y.; Howver, R.; Gogoi, B.; Yazdi, N. A high-sensitive ultra-thin MEMS capacitive vacuum sensor. In Proceedings of the 2011 16th International Solid-State Sensors, Actuators and Microsystems Conference, Beijing, China, 5–9 June 2011. [Google Scholar] [CrossRef]
- Zhao, L.; Xu, T.; Hebibul, R.; Jiang, Z.; Ding, J.; Peng, N.; Guo, X.; Xu, Y.; Wang, H.; Zhao, Y. A bossed diaphragm piezoresistive pressure with a peninsula-island structure for the ultra-low-pressure-range with high sensitivity. Meas. Sci. Technol. 2016, 27, 124012. [Google Scholar] [CrossRef]
- Guan, T.; Yang, F.; Wang, W.; Huang, X.; Jiang, B.; He, J.; Zhang, L.; Fu, F.; Li, D.; Li, R.; et al. A novel 0–3 kPa piezoresistive pressure sensor based on a shuriken-structure diaphragm. In Proceedings of the 2016 IEEE 29th International Conference on Micro Electro Mechanical Systems (MEMS), Shanghai, China, 24–28 January 2016. [Google Scholar] [CrossRef]
- Xu, T.; Wang, H.; Xia, Y.; Zhao, Z.; Huang, M.; Wang, J.; Zhao, L.; Zhao, Y.; Jiang, Z. Piezoresistive pressure sensor with high sensitivity for medical application using peninsula-island structure. Front. Mech. Eng. 2017, 12, 546–553. [Google Scholar] [CrossRef]
- Tran, A.V.; Zhang, X.; Zhu, B. The development of a new piezoresistive pressure sensor for low pressures. IEEE Trans. Ind. Electron. 2018, 65, 6487–6496. [Google Scholar] [CrossRef]
- Tran, A.V.; Zhang, X.; Zhu, B. Mechanical structure design of a piezoresistive pressure sensor for low-pressure measurement: A computational analysis by increases in the sensor sensitivity. Sensors 2018, 18, 2023. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, C.; Zhao, L.; Ocana, J.L.; Cordovilla, F.; Yin, Z. Characterization and analysis of a novel structural SOI piezoresistive pressure sensor with high sensitivity and linearity. Microsyst. Technol. 2020, 26, 2955–2960. [Google Scholar] [CrossRef]
- Zoheir, K.; Kourosh, H.; Amir, A. MEMS piezoresistive pressure sensor with patterned thinning of diaphragm. Microelectron. Int. 2020, 37, 147–153. [Google Scholar]
- Basoc, M.; Prigodskiy, D. Development of high-sensitivity piezoresistive pressure sensors for −0.5…+0.5 kPa. J. Micromach. Microeng. 2020, 30, 105006. [Google Scholar] [CrossRef]
- Basoc, M. Ultra-high sensitivity MEMS pressure sensor utilizing bipolar junction transistor for pressure ranging from −-1 to 1 kPa. IEEE Sens. J. 2021, 4, 4357–4364. [Google Scholar]
- Smith, C.S. Piezoresistance effect in germanium and silicon. Phys. Rev. 1954, 94, 42–49. [Google Scholar] [CrossRef]
- Kanda, Y. Piezoresistance effect of silicon. Sens. Actuators A: Phys. 1991, 28, 83–91. [Google Scholar] [CrossRef]
- Bao, M. Piezoresistive sensing. In Analysis and Design Principles of MEMS Devices, 1st ed.; Elsevier B.V.: Amsterdam, The Netherlands, 2005; pp. 247–304. [Google Scholar]
- Huang, X.; Zhang, D. A high sensitivity and high linearity pressure sensor based on a peninsula-structured diaphragm for low-pressure ranges. Sens. Actuators A Phys. 2014, 216, 176–189. [Google Scholar] [CrossRef]
- Clark, S.K.; Wise, K.D. Pressure sensitivity in anisotropically etched thin-diaphragm pressure sensors. IEEE Trans. Electron. Devices 1979, 26, 1887–1896. [Google Scholar] [CrossRef]
- Sandmaier, H. Non-linear analytical modelling of bossed diaphragm for pressure sensor. Sens. Actuators A: Phys. 1991, 27, 815–819. [Google Scholar] [CrossRef]
- Tian, B.; Zhao, Y.; Fiang, Z. The novel structure design for pressure sensor. Sens. Rev. 2010, 30, 305–313. [Google Scholar] [CrossRef]
- Ferdinand, P.B.; Jognston, E.R.; DeWolf, J.T.; Mazurek, D.F. Energy methods. In Mechanics of Materials, 5th ed.; McGraw Hill: New York, NY, USA, 2009; pp. 670–725. [Google Scholar]
- Shimazoe, M.; Matsuoka, Y. A special silicon diaphragm pressure sensor with high output and high accuracy. Sens. Actuators 1982, 2, 275–282. [Google Scholar] [CrossRef]
- Zhang, S.; Wang, T.; Lou, L.; Tsang, W.M. Annularly grooved diaphragm pressure sensor with embedded silicon nanowires for low pressure application. J. Microelectromech. Syst. 2014, 23, 1396–1407. [Google Scholar] [CrossRef]
- Lou, L.; Zhang, S.; Park, W.T.; Tsai, J.M.; Kwong, D.L.; Lee, C. Optimization of NEMS pressure sensors with a multilayered diaphragm using silicon nanowires as piezoresistive sensing elements. J. Micromach. Microeng. 2012, 22, 055015. [Google Scholar] [CrossRef]
- Xu, T.; Zhao, L.; Jiang, Z.; Guo, X.; Ding, J.; Xiang, W.; Zhao, Y. A high sensitive pressure sensor with the novel bossed diaphragm combined with peninsula-island structure. Sens. Actuators A Phys. 2016, 244, 66–76. [Google Scholar] [CrossRef]
- Li, C.; Cordovilla, F.; Ocaña, J.L. Annularly grooved membrane combined with rood beam piezoresistive pressure sensor for low pressure applications. Rev. Sci. Instrum. 2017, 88, 035002. [Google Scholar] [CrossRef]
- Sahay, R.; Hirwani, J.; Jindal, S.K.; Sreekanth, P.K.; Kumar, A. Design and analysis of a novel MEMS piezoresistive pressure sensor with annular groove membrane and center mass for low pressure measurements. Res. Sq. 2021, preprint. [Google Scholar] [CrossRef]
- Zoheir, K.; Sajjad, R. A groove engineered ultralow frequency piezoemems energy harvester with ultrahigh output voltage. Int. J. Mod. Phys. B 2018, 32, 185–208. [Google Scholar]
- Thawornsathit, P.; Juntasaro, E.; Rattanasonti, H.; Pengpad, P.; Saejok, K.; Leepattarapongpan, C.; Chaowicharat, E.; Jeamsaksiri, W. Mechanical diaphragm structure design of a MEMS-based piezoresistive pressure sensor for sensitivity and linearity enhancement. Eng. J. 2022, 26, 43–57. [Google Scholar] [CrossRef]
- Fung, Y.C. Finite deformation. In Foundations of Solid Mechanics; Prentice-Hall: Englewood Cliffs, NJ, USA, 1956; pp. 436–439. [Google Scholar]
- Sharpe, W.N.; Turner, K.T.; Edwards, R.L. Tensile testing of polysilicon. Exp. Mech. 1999, 39, 162–170. [Google Scholar] [CrossRef]
- Hopcroft, M.A.; Nix, W.D.; Kenny, T.W. What is the Young’s Modulus of Silicon. J. Microelectromech. Syst. 2010, 19, 229–238. [Google Scholar] [CrossRef]






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Configuration | Groove Depth | Groove Length |
|---|---|---|
| 0.2, 0.4, 0.6 and 0.8 | 0.35 | |
| 0.2, 0.4, 0.6 and 0.8 | 0.35 | |
| 0.2, 0.4, 0.6 and 0.8 | 0.35 | |
| 0.2, 0.4, 0.6 and 0.8 | 0.175 and 0.35 | |
| 0.2, 0.4, 0.6 and 0.8 | 0.175 and 0.35 | |
| 0.2, 0.4, 0.6 and 0.8 | 0.175 and 0.35 | |
| 0.2, 0.4, 0.6 and 0.8 | 0.175 and 0.35 | |
| 0.2, 0.4, 0.6 and 0.8 | 0.175 and 0.35 | |
| 0.2, 0.4, 0.6 and 0.8 | 0.175 and 0.35 | |
| 0.2, 0.4, 0.6 and 0.8 | 8.0 | |
| 0.2, 0.4, 0.6 and 0.8 | 8.0 |
| Groove Design | [mV/V/kPa] | [% FSS] |
|---|---|---|
= 0.2 | 6.707 | 0.075 |
| Decrease (−1.4%) | Decrease (−32%) | |
= 0.35 | 7.547 | 0.099 |
| Increase (11%) | Decrease (−10%) | |
= 0.2 | 7.774 | 0.071 |
| Increase (14%) | Decrease (−35%) | |
| Without a groove, according to Thawornsathit et al., 2022 [41] | 6.8 | 0.11 |
| MEMS Piezoresistive Pressure Sensor | Pressure Range (kPa) | Diaphragm Width | S (mV/V/kPa) | NL (% FSS) | S/NL |
|---|---|---|---|---|---|
| Tran et al. (2018b) [20] (Local groove) | 0–5 | 2900 μm | 6.93 | 0.23 | 30.15 |
| Li et al. (2020) [21] (Annular groove) | 0–6.895 | 3600 μm | 4.48 | 0.25 | 17.92 |
| Sahay et al. (2021) [38] (Annular groove) | 0–5 | 3600 μm | 4.061 | 0.15 | 27.07 |
| ) | 1–5 | 2900 μm | 6.707 | 0.075 | 89.43 |
| ) | 1–5 | 2900 μm | 7.547 | 0.099 | 76.23 |
| ) | 1–5 | 2900 μm | 7.774 | 0.071 | 109.49 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Thawornsathit, P.; Juntasaro, E.; Rattanasonti, H.; Pengpad, P.; Saejok, K.; Leepattarapongpan, C.; Chaowicharat, E.; Jeamsaksiri, W. Enhancing Performance of a MEMS-Based Piezoresistive Pressure Sensor by Groove: Investigation of Groove Design Using Finite Element Method. Micromachines 2022, 13, 2247. https://doi.org/10.3390/mi13122247
Thawornsathit P, Juntasaro E, Rattanasonti H, Pengpad P, Saejok K, Leepattarapongpan C, Chaowicharat E, Jeamsaksiri W. Enhancing Performance of a MEMS-Based Piezoresistive Pressure Sensor by Groove: Investigation of Groove Design Using Finite Element Method. Micromachines. 2022; 13(12):2247. https://doi.org/10.3390/mi13122247
Chicago/Turabian StyleThawornsathit, Phongsakorn, Ekachai Juntasaro, Hwanjit Rattanasonti, Putapon Pengpad, Karoon Saejok, Chana Leepattarapongpan, Ekalak Chaowicharat, and Wutthinan Jeamsaksiri. 2022. "Enhancing Performance of a MEMS-Based Piezoresistive Pressure Sensor by Groove: Investigation of Groove Design Using Finite Element Method" Micromachines 13, no. 12: 2247. https://doi.org/10.3390/mi13122247