
High Sensitivity Planar Hall Effect Magnetic Field Gradiometer for Measurements in Millimeter Scale Environments

Abstract
:1. Introduction
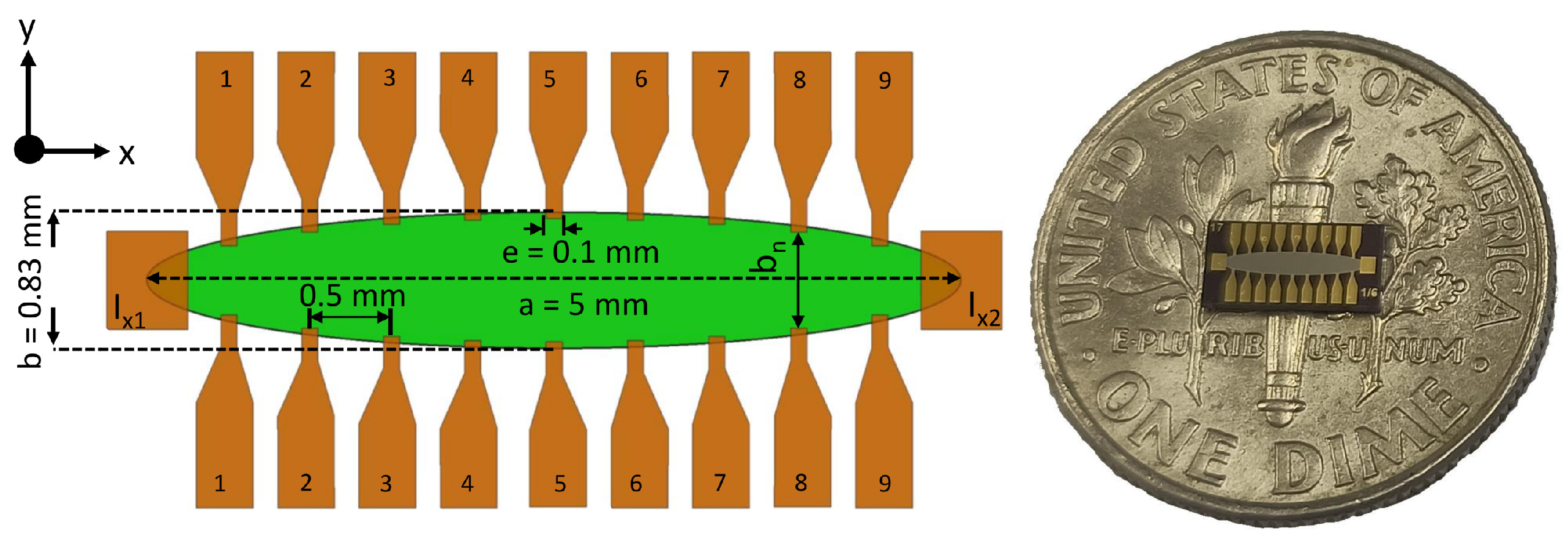
2. Experimental Techniques
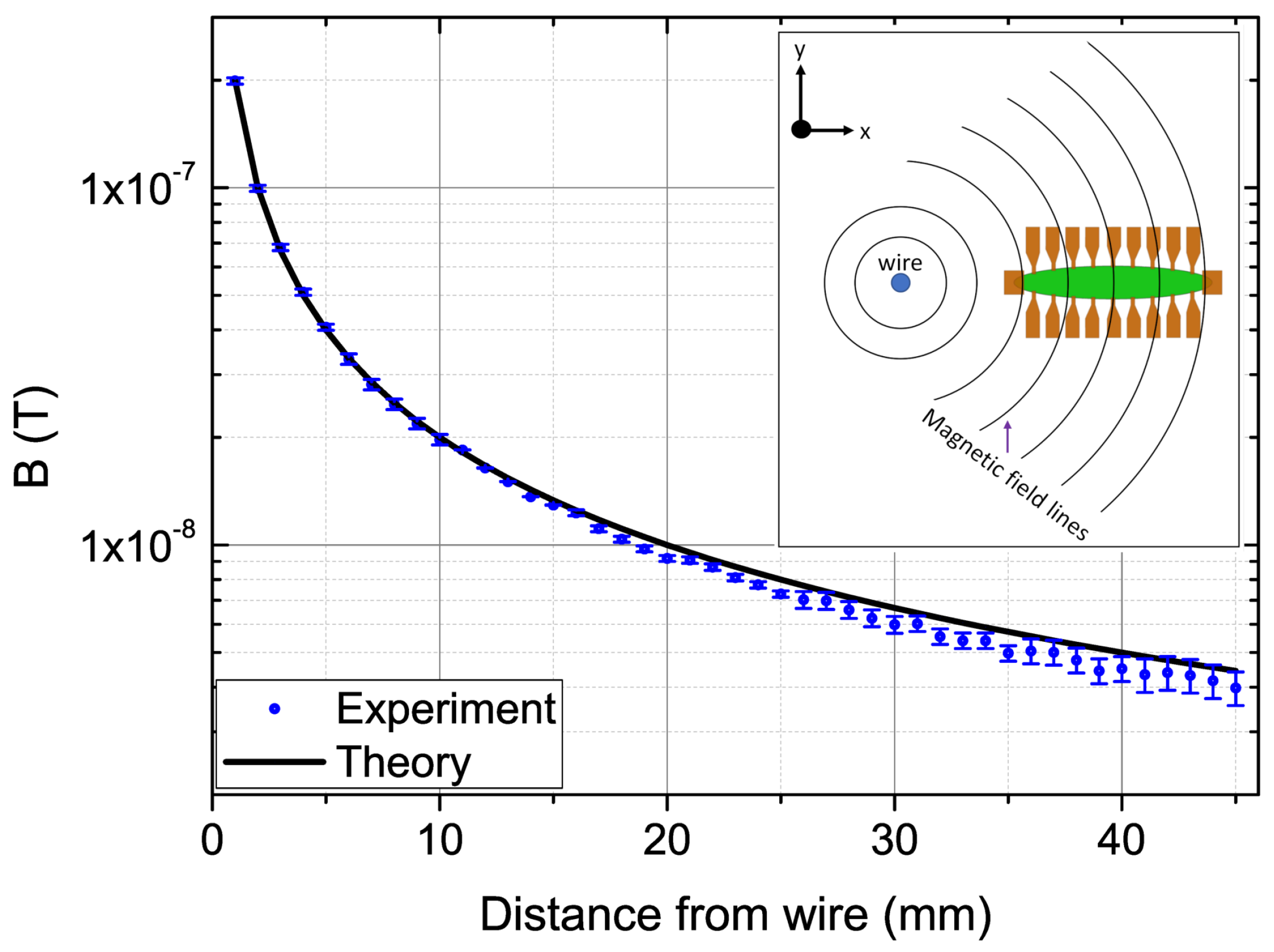
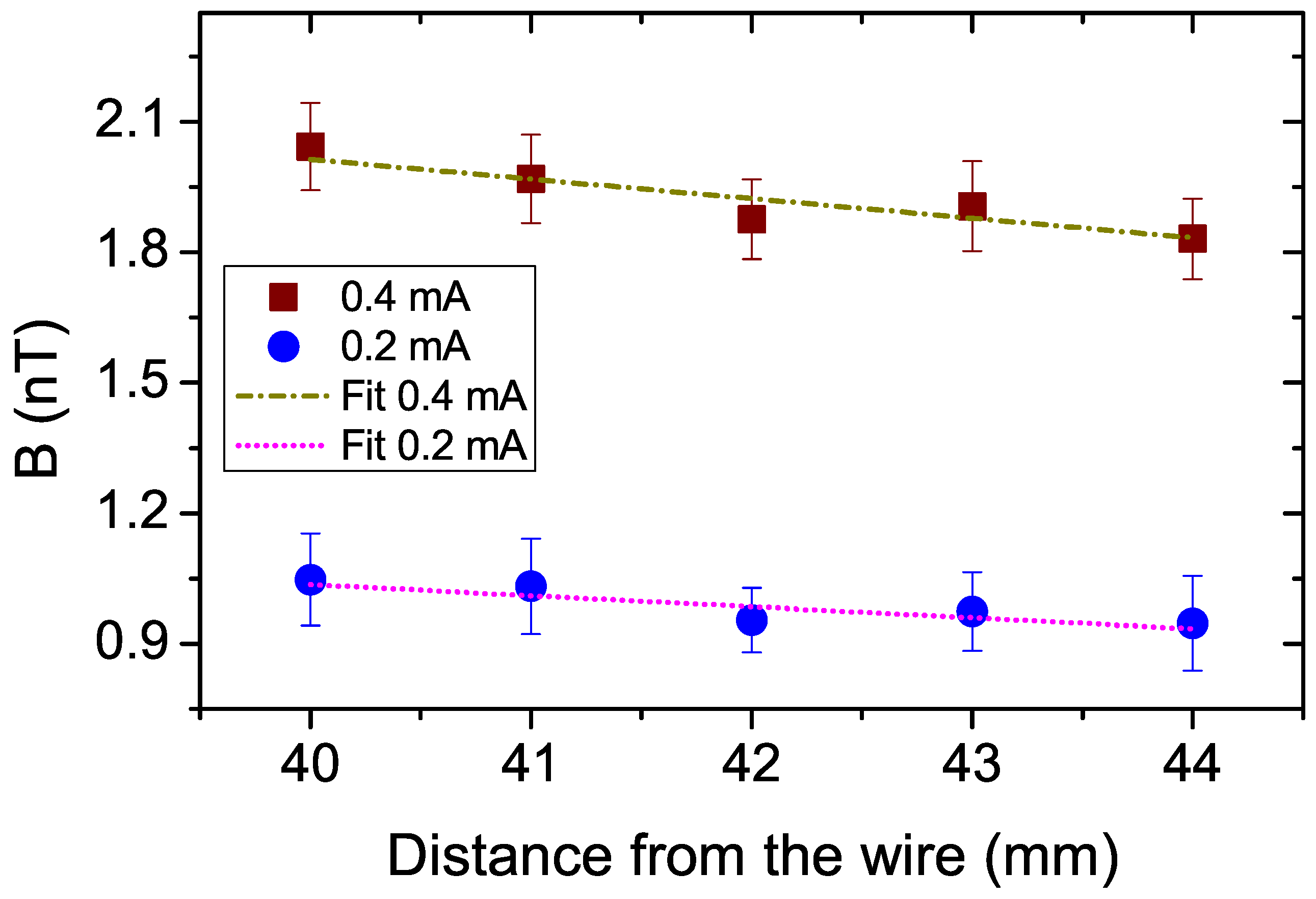
3. Equivalent Magnetic Noise Characterizations
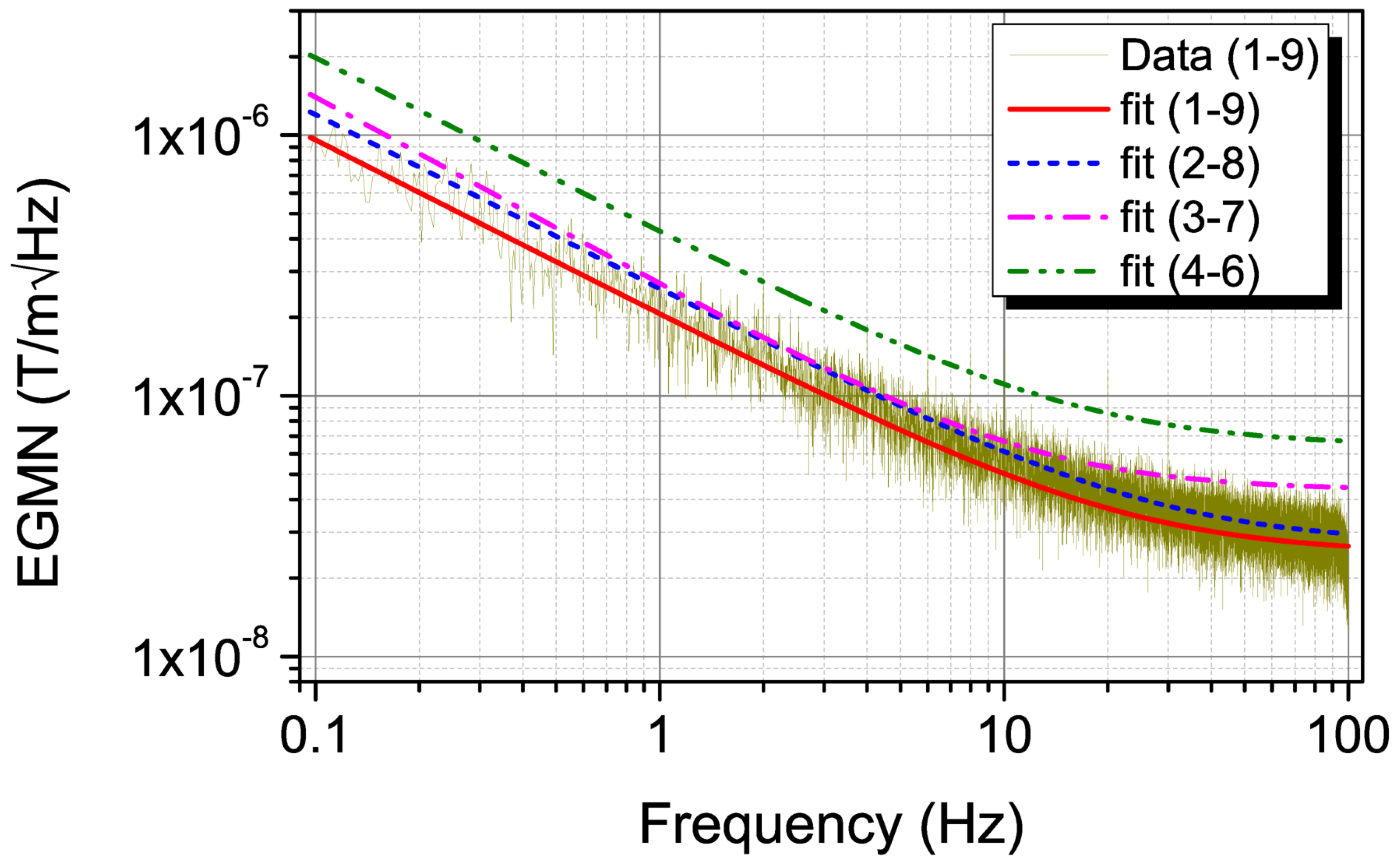
4. Equivalent Gradient Magnetic Noise
5. Summary
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kim, H.; Golynsky, A.; Golynsky, D.; Yu, H.; von Frese, R.; Hong, J. New Magnetic Anomaly Constraints on the Antarctic Crust. J. Geophys. Res. Solid Earth 2022, 127, e2021JB023329. [Google Scholar] [CrossRef]
- Chen, C.H.; Chen, P.W.; Chen, P.J.; Liu, T.H. Indoor Positioning Using Magnetic Fingerprint Map Captured by Magnetic Sensor Array. Sensors 2021, 21, 5707. [Google Scholar] [CrossRef]
- Včelák, J.; Ripka, P.; Kubik, J.; Platil, A.; Kašpar, P. AMR navigation systems and methods of their calibration. Sens. Actuator A 2005, 123, 122–128. [Google Scholar] [CrossRef]
- Ausserlechner, U. The optimum layout for giant magneto-resistive angle sensors. IEEE Sens. J. 2010, 10, 1571–1582. [Google Scholar] [CrossRef]
- Musuroi, C.; Oproiu, M.; Volmer, M.; Neamtu, J.; Avram, M.; Helerea, E. Low field optimization of a non-contacting high-sensitivity GMR-based DC/AC current sensor. Sensors 2021, 21, 2564. [Google Scholar] [CrossRef]
- Ripka, P.; Mlejnek, P.; Hejda, P.; Chirtsov, A.; Vyhnánek, J. Rectangular array electric current transducer with integrated fluxgate sensors. Sensors 2019, 19, 4964. [Google Scholar] [CrossRef] [Green Version]
- Barroso, T.G.; Martins, R.C.; Fernandes, E.; Cardoso, S.; Rivas, J.; Freitas, P.P. Detection of BCG bacteria using a magnetoresistive biosensor: A step towards a fully electronic platform for tuberculosis point-of-care detection. Biosens. Bioelectron. 2018, 100, 259–265. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Cheng, H.; Alhalili, Z.; Xu, G.; Gao, G. The progress of magnetic sensor applied in biomedicine: A review of non-invasive techniques and sensors. J. Chin. Chem. Soc. 2021, 68, 216–227. [Google Scholar] [CrossRef]
- Mooney, J.W.; Ghasemi-Roudsari, S.; Banham, E.R.; Symonds, C.; Pawlowski, N.; Varcoe, B.T. A portable diagnostic device for cardiac magnetic field mapping. Biomed. Phys. Eng. Express 2017, 3, 015008. [Google Scholar] [CrossRef]
- Kim, J.; Kumar, R.; Bandodkar, A.J.; Wang, J. Advanced materials for printed wearable electrochemical devices: A review. Adv. Elect. Mater. 2017, 3, 1600260. [Google Scholar] [CrossRef]
- Melzer, M.; Mönch, J.I.; Makarov, D.; Zabila, Y.; Cañón Bermúdez, G.S.; Karnaushenko, D.; Baunack, S.; Bahr, F.; Yan, C.; Kaltenbrunner, M.; et al. Wearable magnetic field sensors for flexible electronics. Adv. Mater. 2015, 27, 1274–1280. [Google Scholar] [CrossRef] [Green Version]
- Jucevičius, M.; Ožiūnas, R.; Narvydas, G.; Jegelevičius, D. Permanent magnet tracking method resistant to background magnetic field for assessing jaw movement in wearable devices. Sensors 2022, 22, 971. [Google Scholar] [CrossRef]
- Feiner, R.; Dvir, T. Tissue–electronics interfaces: From implantable devices to engineered tissues. Nat. Rev. Mater. 2017, 3, 17076. [Google Scholar] [CrossRef]
- Javor, J.; Stange, A.; Pollock, C.; Fuhr, N.; Bishop, D.J. 100 pT/cm single-point MEMS magnetic gradiometer from a commercial accelerometer. Microsyst. Nanoeng. 2020, 6, 71. [Google Scholar] [CrossRef]
- Lim, B.; Mahfoud, M.; Das, P.T.; Jeon, T.; Jeon, C.; Kim, M.; Nguyen, T.K.; Tran, Q.H.; Terki, F.; Kim, C. Advances and key technologies in magnetoresistive sensors with high thermal stabilities and low field detectivities. APL Mater. 2022, 10, 051108. [Google Scholar] [CrossRef]
- Nhalil, H.; Givon, T.; Das, P.T.; Hasidim, N.; Mor, V.; Schultz, M.; Amrusi, S.; Klein, L.; Grosz, A. Planar Hall Effect Magnetometer With 5 pT Resolution. IEEE Sens. Lett. 2019, 3, 2501904. [Google Scholar] [CrossRef]
- Nhalil, H.; Das, P.T.; Schultz, M.; Amrusi, S.; Grosz, A.; Klein, L. Thickness dependence of elliptical planar Hall effect magnetometers. Appl. Phys. Lett. 2020, 117, 262403. [Google Scholar] [CrossRef]
- Tsukamoto, A.; Adachi, S.; Hato, T.; Oshikubo, Y.; Tanabe, K. Design and Fabrication of HTS-SQUID Gradiometer With Imbalance of 10–4 Using a Gradiometric SQUID Structure. IEEE Trans. Appl. Supercond. 2022, 32, 1600309. [Google Scholar] [CrossRef]
- Sui, Y.; Miao, H.; Zhou, Z.; Luan, H.; Wang, Y. Correction and compensation of an airborne fluxgate magnetic tensor gradiometer. Explor. Geophys. 2018, 49, 726–734. [Google Scholar] [CrossRef]
- Mahfoud, M.; Tran, Q.H.; Wane, S.; Ngo, D.T.; Belarbi, E.H.; Boukra, A.; Kim, M.; Elzwawy, A.; Kim, C.; Reiss, G.; et al. Reduced thermal dependence of the sensitivity of a planar Hall sensor. Appl. Phys. Lett. 2019, 115, 072402. [Google Scholar] [CrossRef]
- Grosz, A.; Mor, V.; Amrusi, S.; Faivinov, I.; Paperno, E.; Klein, L. A high-resolution planar Hall effect magnetometer for ultra-low frequencies. IEEE Sens. J. 2016, 16, 3224–3230. [Google Scholar] [CrossRef]
- Grosz, A.; Mor, V.; Paperno, E.; Amrusi, S.; Faivinov, I.; Schultz, M.; Klein, L. Planar hall effect sensors with subnanotesla resolution. IEEE Mag. Lett. 2013, 4, 6500104. [Google Scholar] [CrossRef]
- Mor, V.; Schultz, M.; Sinwani, O.; Grosz, A.; Paperno, E.; Klein, L. Planar Hall effect sensors with shape-induced effective single domain behavior. J. Appl. Phys. 2012, 111, 07E519. [Google Scholar] [CrossRef]
- Gijs, M.; Giesbers, J.; Beliën, P.; Van Est, J.; Briaire, J.; Vandamme, L. 1/f noise in magnetic Ni80Fe20 single layers and Ni80Fe20/Cu multilayers. J. Magn. Magn. Mater. 1997, 165, 360–362. [Google Scholar] [CrossRef] [Green Version]
- McKenna, S.P.; Parkman, K.B.; Perren, L.J.; McKenna, J.R. Response of an electromagnetic gradiometer to a subsurface wire. IEEE Trans. Geosci. Remote Sens. 2011, 49, 4944–4953. [Google Scholar] [CrossRef]
- Song, Z.; Dai, H.; Rong, L.; Dong, H.; Wu, J.; Qiu, L.; Zhang, G.; Wang, Y.; Tao, Q.; Pei, Y.; et al. Noise compensation of a mobile LTS SQUID planar gradiometer for aeromagnetic detection. IEEE Trans. Appl. Supercond. 2019, 29, 1600205. [Google Scholar] [CrossRef]
- Perry, A.; Bulatowicz, M.; Larsen, M.; Walker, T.; Wyllie, R. All-optical intrinsic atomic gradiometer with sub-20 fT/cm/sqrt Hz sensitivity in a 22 μT earth-scale magnetic field. Opt. Express 2020, 28, 36696–36705. [Google Scholar] [CrossRef]
- Limes, M.; Foley, E.; Kornack, T.; Caliga, S.; McBride, S.; Braun, A.; Lee, W.; Lucivero, V.; Romalis, M. Total-field atomic gradiometer for unshielded portable magnetoencephalography. arXiv 2020, arXiv:2001.03534. [Google Scholar]
- Sui, Y.; Li, G.; Wang, S.; Lin, J. Compact fluxgate magnetic full-tensor gradiometer with spherical feedback coil. Rev. Sci. Instr. 2014, 85, 014701. [Google Scholar] [CrossRef]
- Merayo, J.M.; Brauer, P.; Primdahl, F. Triaxial fluxgate gradiometer of high stability and linearity. Sens. Actuators A 2005, 120, 71–77. [Google Scholar] [CrossRef]
- Zhang, M.; Or, S.W. Magnetoelectric transverse gradient sensor with high detection sensitivity and low gradient noise. Sensors 2017, 17, 2446. [Google Scholar] [CrossRef] [PubMed]
- Shen, X.; Teng, Y.; Hu, X. Design of a low-cost small-size fluxgate sensor. Sensors 2021, 21, 6598. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Shen, Y.; Lei, C.; Wang, J.; Zhao, S.; Chen, J.; Chu, Z.; Gao, J. Highly-Sensitive MEMS Micro-Fluxgate Magnetometer. IEEE Elec. Dev. Lett. 2022, 43, 1327–1330. [Google Scholar] [CrossRef]
- Shen, Y.; McLaughlin, K.L.; Gao, J.; Li, M.; Li, J.; Viehland, D. Effective optimization of magnetic noise for a Metglas/Pb (Zr, Ti) O3 magnetoelectric sensor array in an open environment. Mater. Lett. 2013, 91, 307–310. [Google Scholar] [CrossRef]
- Leach, W.M. Fundamentals of low-noise analog circuit design. Proc. IEEE 1994, 82, 1515–1538. [Google Scholar] [CrossRef] [Green Version]
- Jung, G.; Ocio, M.; Paltiel, Y.; Shtrikman, H.; Zeldov, E. Magnetic noise measurements using cross-correlated Hall sensor arrays. Appl. Phys. Lett. 2001, 78, 359–361. [Google Scholar] [CrossRef] [Green Version]
- Sui, Y.; Miao, H.; Wang, Y.; Luan, H.; Lin, J. Correction of a towed airborne fluxgate magnetic tensor gradiometer. IEEE Geosci. Remote. Sens. Lett. 2016, 13, 1837–1841. [Google Scholar] [CrossRef]
- Klein, T.; Wang, W.; Yu, L.; Wu, K.; Boylan, K.L.; Vogel, R.I.; Skubitz, A.P.; Wang, J.P. Development of a multiplexed giant magnetoresistive biosensor array prototype to quantify ovarian cancer biomarkers. Biosens. Bioelectron. 2019, 126, 301–307. [Google Scholar] [CrossRef]
- Schutt, J.; Illing, R.; Volkov, O.; Kosub, T.; Granell, P.N.; Nhalil, H.; Fassbender, J.; Klein, L.; Grosz, A.; Makarov, D. Two Orders of Magnitude Boost in the Detection Limit of Droplet-Based Micro-Magnetofluidics with Planar Hall Effect Sensors. ACS Omega 2020, 5, 20609–20617. [Google Scholar] [CrossRef]
- Gul, A.; Tzirtzilakis, E.E.; Makhanov, S.S. Simulation of targeted magnetic drug delivery: Two-way coupled biomagnetic fluid dynamics approach. Phys. Fluids 2022, 34, 021911. [Google Scholar] [CrossRef]
- Shaw, S.; Shit, G.; Tripathi, D. Impact of drug carrier shape, size, porosity and blood rheology on magnetic nanoparticle-based drug delivery in a microvessel. Colloids Surf. A 2022, 639, 128370. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| V-pair | R | ||||
|---|---|---|---|---|---|
| No: | () | (Oe) | (V/T) | () | (m) |
| 1 | 10.05 | 5.68 | 17.83 | 0.0778 | 4.200 × 10 |
| 2 | 11.14 | 5.44 | 22.43 | 0.0938 | 5.866 × 10 |
| 3 | 11.53 | 5.43 | 23.06 | 0.0964 | 6.837 × 10 |
| 4 | 11.57 | 5.35 | 23.62 | 0.0973 | 7.365 × 10 |
| 5 | 11.79 | 5.35 | 23.68 | 0.0975 | 7.533 × 10 |
| 6 | 11.61 | 5.43 | 23.39 | 0.0974 | 7.365 × 10 |
| 7 | 11.49 | 5.46 | 23.02 | 0.0966 | 6.837 × 10 |
| 8 | 11.07 | 5.52 | 22.70 | 0.0966 | 5.866 × 10 |
| 9 | 10.12 | 5.66 | 18.01 | 0.0781 | 4.200 × 10 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nhalil, H.; Schultz, M.; Amrusi, S.; Grosz, A.; Klein, L. High Sensitivity Planar Hall Effect Magnetic Field Gradiometer for Measurements in Millimeter Scale Environments. Micromachines 2022, 13, 1898. https://doi.org/10.3390/mi13111898
Nhalil H, Schultz M, Amrusi S, Grosz A, Klein L. High Sensitivity Planar Hall Effect Magnetic Field Gradiometer for Measurements in Millimeter Scale Environments. Micromachines. 2022; 13(11):1898. https://doi.org/10.3390/mi13111898
Chicago/Turabian StyleNhalil, Hariharan, Moty Schultz, Shai Amrusi, Asaf Grosz, and Lior Klein. 2022. "High Sensitivity Planar Hall Effect Magnetic Field Gradiometer for Measurements in Millimeter Scale Environments" Micromachines 13, no. 11: 1898. https://doi.org/10.3390/mi13111898