In this section some mathematical considerations and derivations to determine controller structure are described. Numerical simulations and results of experimental validation are provided to corroborate the proposed controller effectiveness.
3.1. Two-Modes Controller Structure
The general expression of a two-modes controller structure is either a Proportional-Integral (PI) described by
or a Proportional-Derivative (PD) given by
, that can be modified to integrate the fractional-order approach as follows,
for the PD controller and
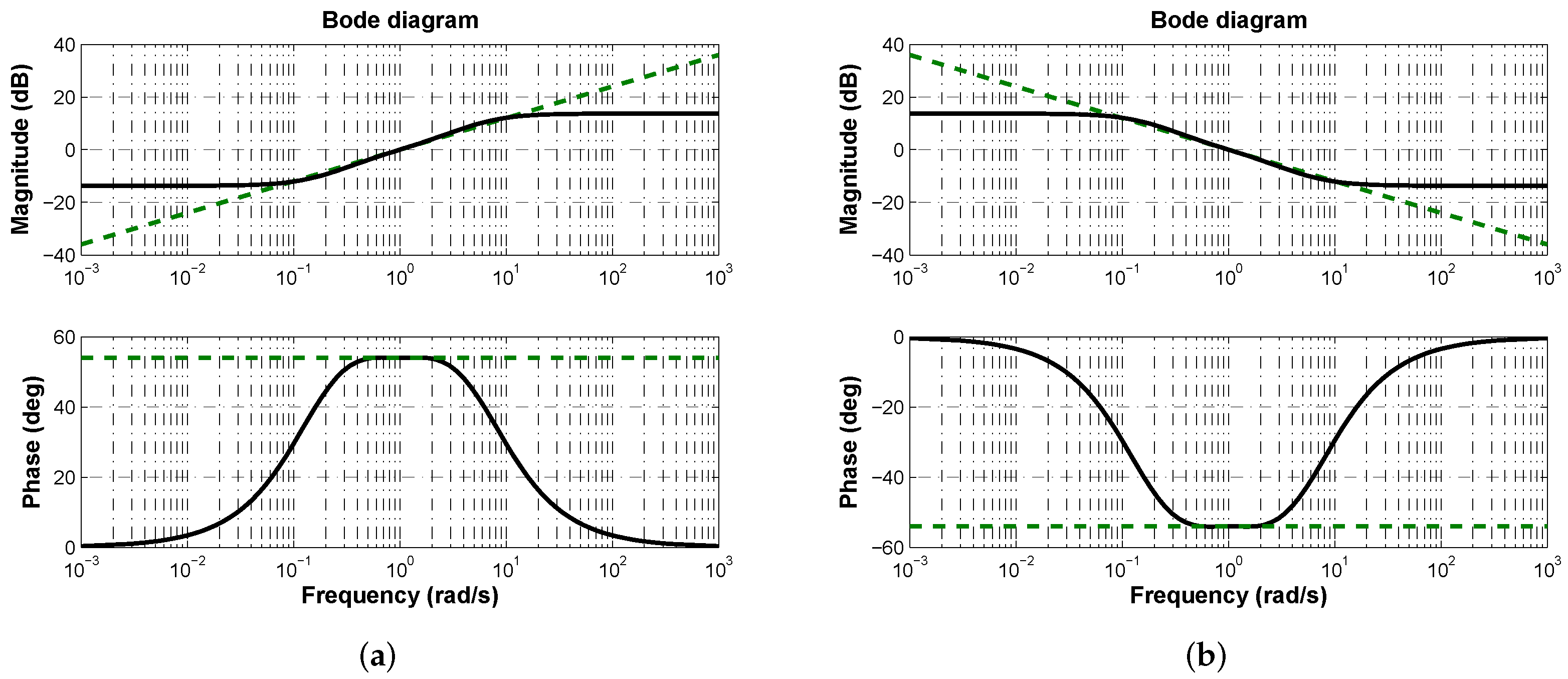
for the PI structure, from which the fractional-order Laplacian operator
can be identified and
,
,
are proportional gain, derivative and integral time constants, respectively.
To determine if a PD or PI controller is required for the plant under consideration, it is necessary to analyze frequency information previously provided as follows,
By substituting (
3) into (
12), the approximation of two-modes controller structure will be given as follows,
where
and
are numerator and denominator of fractional-order approximation of Laplacian operator (
3).
The parameters of PD controller (
14) will be tuned through swarm and genetic optimization algorithms by minimizing criteria (
9) and (
10) with constraints (
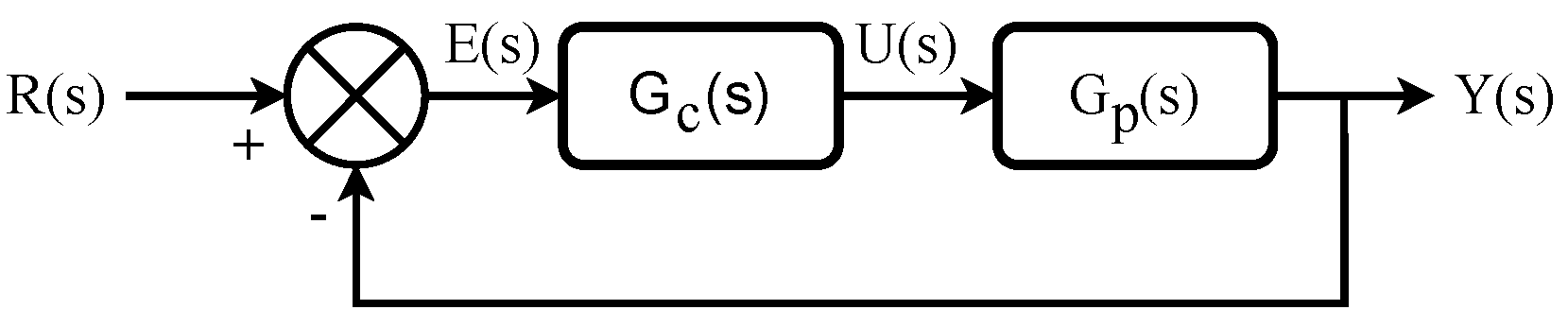
11). It is worth noting up to this point that once both controller and plant transfer functions are know, criterion
can be simplified by computing open-loop transfer function
of control diagram from
Figure 2 as follows,
where
and
are numerator and denominator of PD controller (
14), severally. If the error is defined as
and the closed-loop transfer function is given by
, the mathematical model of closed-loop error will be described as follows,
thus, the closed-loop steady-state error can be computed as,
which can be simplified to
where
and
.
In the following section, numerical results from optimization and voltage regulation of buck converter are described. Experimental validation to corroborate viability of proposed approach is provided as well.
3.2. Numerical Results
Once optimization algorithms have been applied to minimize criteria (
9) and (
10) with constraints (
11), the PD controller (
14) will be given by the following transfer function,
with its partial fraction expansion given by,
due to the roots of denominator polynomial will always be real because
holds
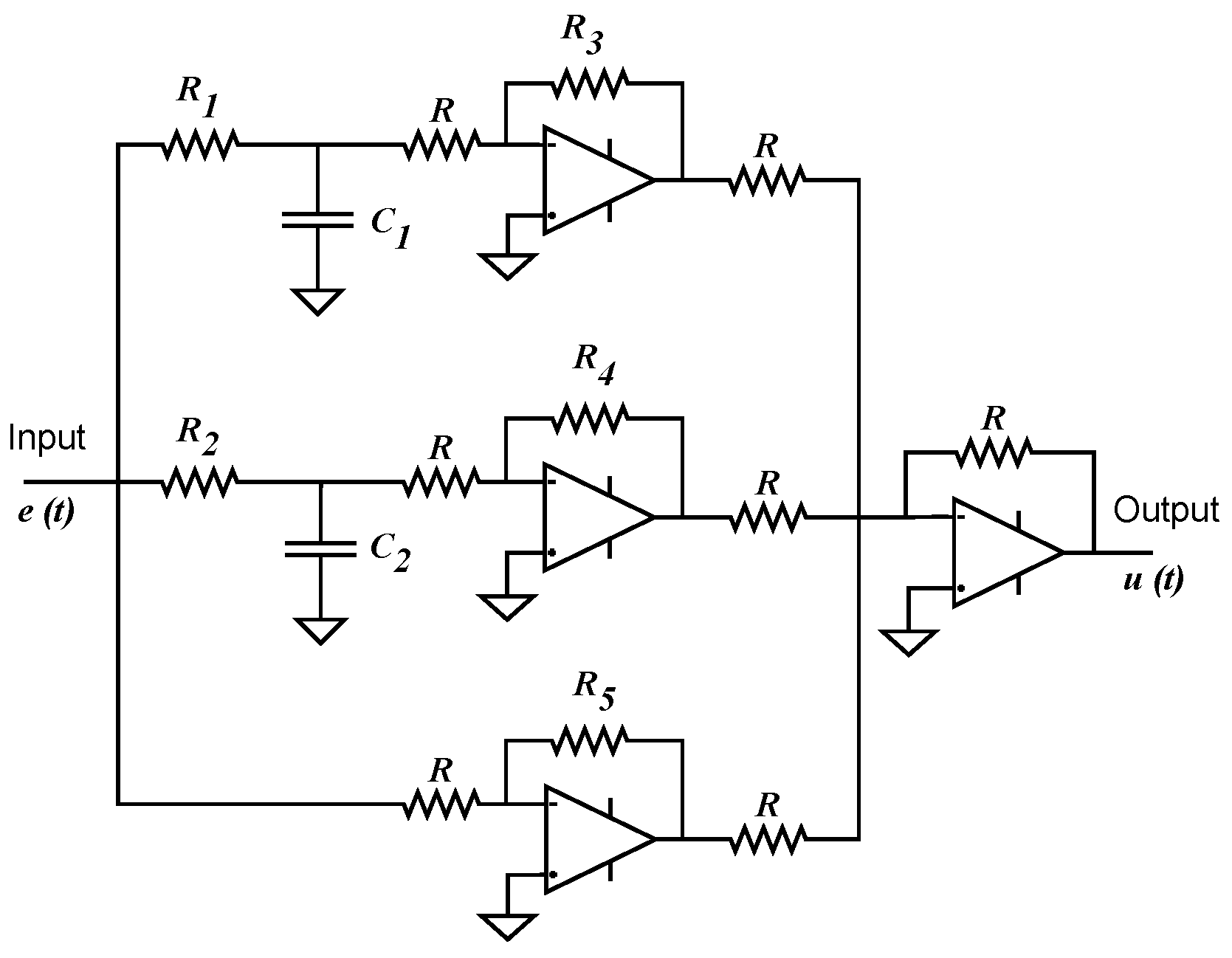
. Implementation of (
20) would require two
circuits and operational amplifiers connected as shown in
Figure 6.
Operation conditions for both algorithms were set as follows:
Numerical results obtained from optimization process are shown in
Table 2 for both minimization criteria (
9) and (
10) with constraints (
11). Data summarized in
Table 2 were obtained from 150 runs performed with each optimization algorithm for each minimization criterion
and
.
Form
Table 2 we can observe more than one solution when minimizing
, however one can note that every solution converge essentially to the same minimum for both optimization algorithms, since
and
vary only in the order of thousandths. On the other hand, when minimizing
a non-negligible difference between possible solutions obtained from both optimization algorithms is determined. Note that minima are essentially the same for either algorithm but different between them. As will be shown later on, this small difference results in smaller control laws.
By substituting
from
Table 2 into the controller structure (
14), parameters of transfer function (
19) and component values for its partial fraction expansion (
20) are provided in
Table 3 and
Table 4, respectively.
From
Table 3 one can see that optimization results for both algorithms when minimizing criterion
are essentially the same with small variations in the controller’s gain
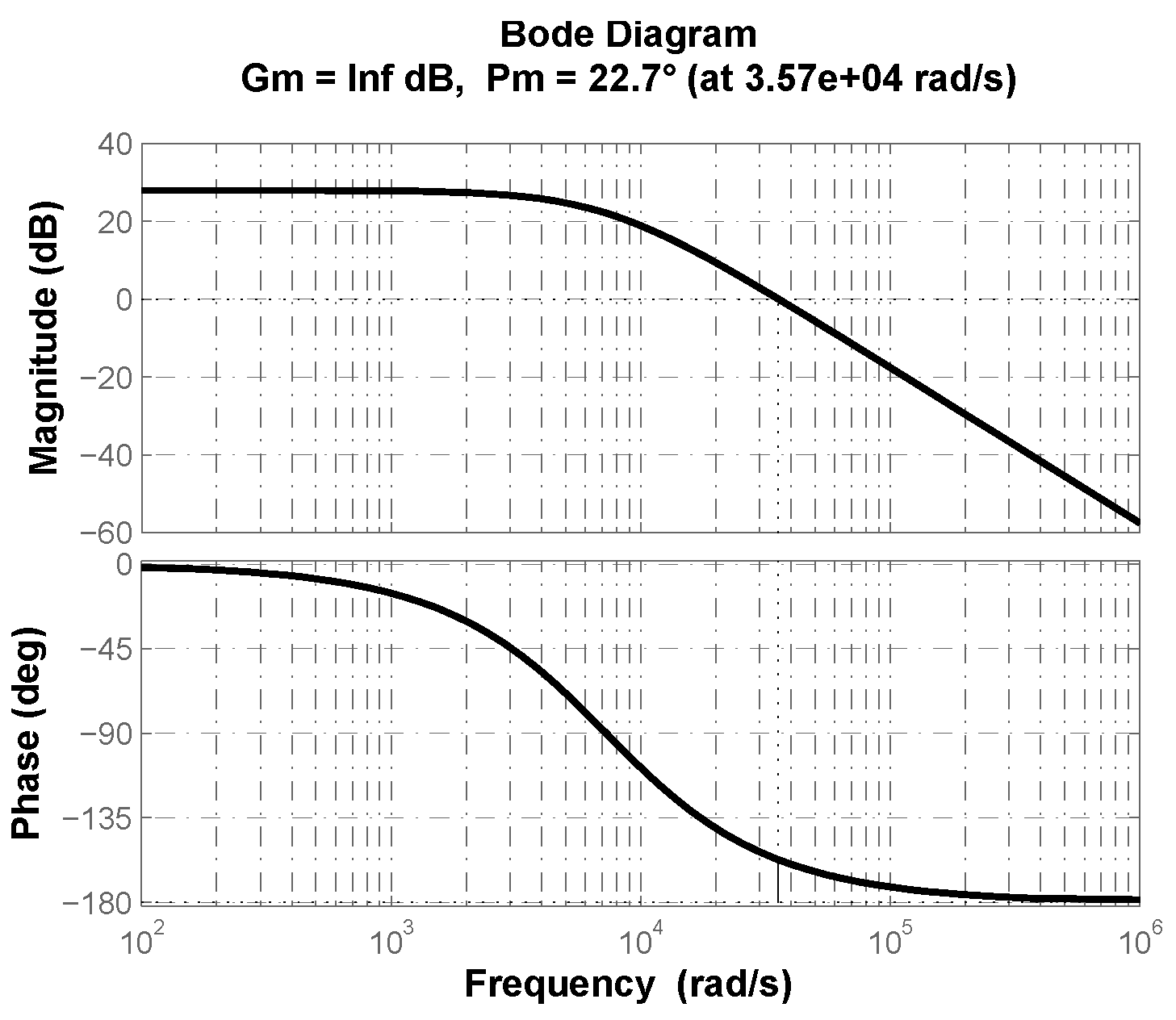
. In
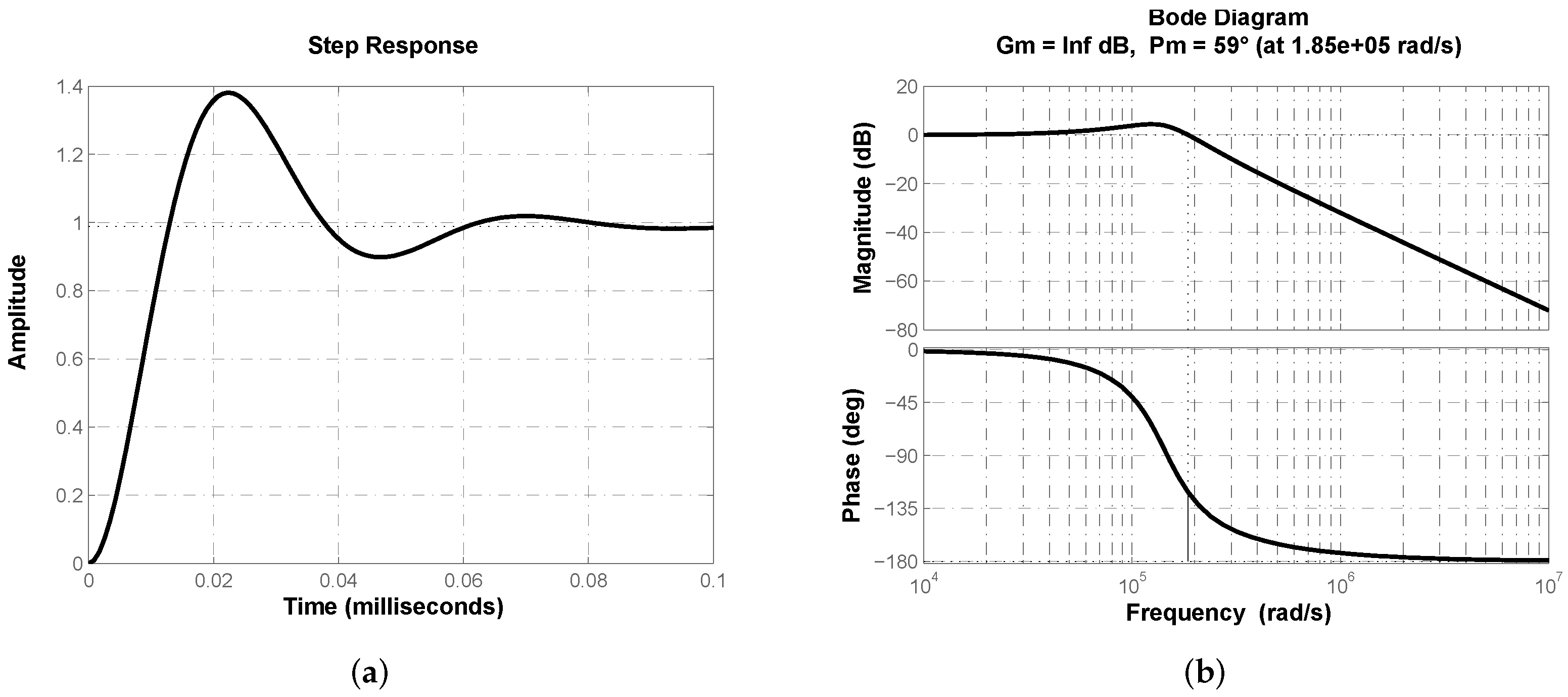
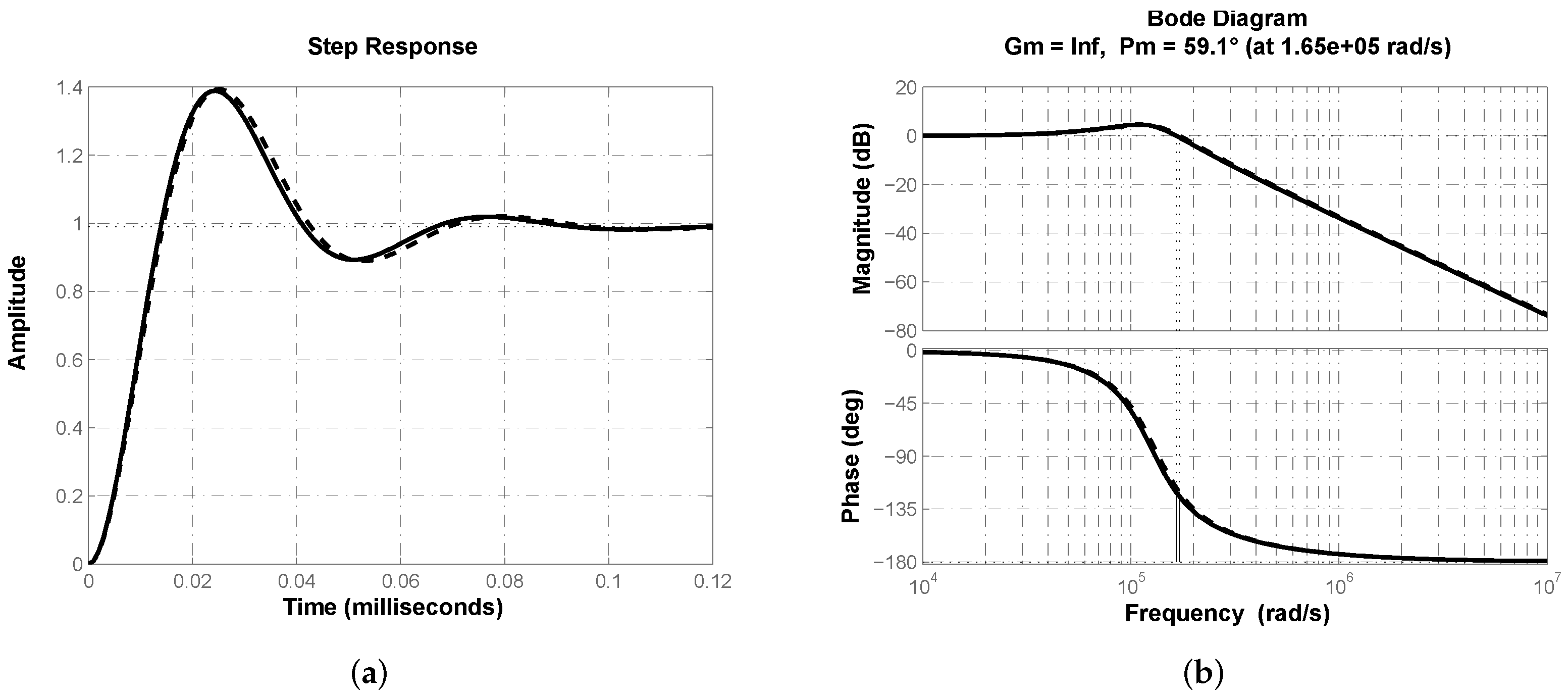
Figure 7a the closed-loop step response of buck converter transfer function (
2) with controller (
19) is shown. Effectiveness of proposed structure regulating output voltage in buck converter can be corroborated. Response velocity can be characterized by its time-related performance parameters rise time
s, peak time
s and settling time
s.
Figure 7b depicts closed-loop system’s frequency response where desired phase margin
° can be corroborated.
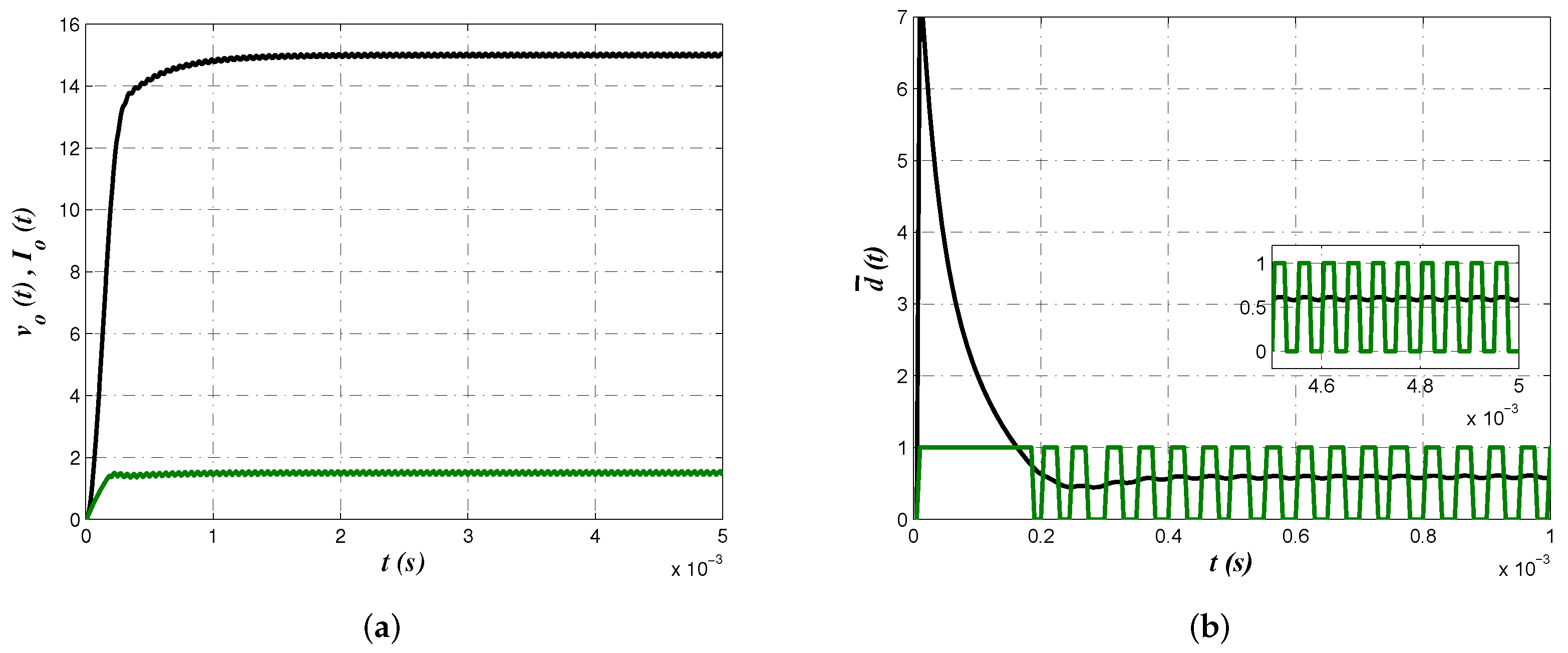
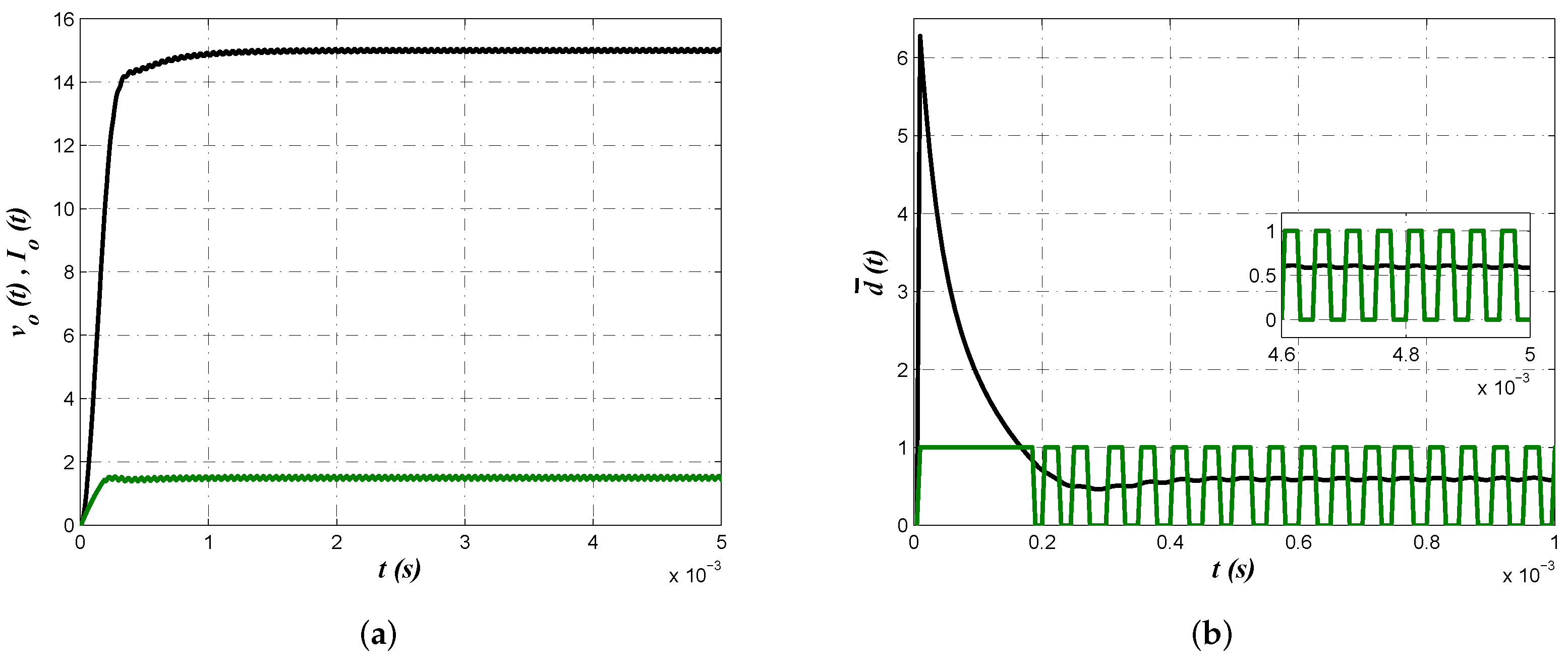
Numerical simulations from PSIM 9.0 software allow us to corroborate proposed approach effectiveness from the electrical perspective. In
Figure 8 buck converter output voltage
, inductor current
and control law
are shown. In
Figure 8a voltage regulation with a smooth convergence to the reference value as well as continuous conduction mode can be confirmed. On the other side,
Figure 8b depicts the control law where its convergence to
and the corresponding effect on the pulse width modulation (PWM) signal can be corroborated.
On the other side, when optimizing through the minimization of criterion
, values of resistances
,
and
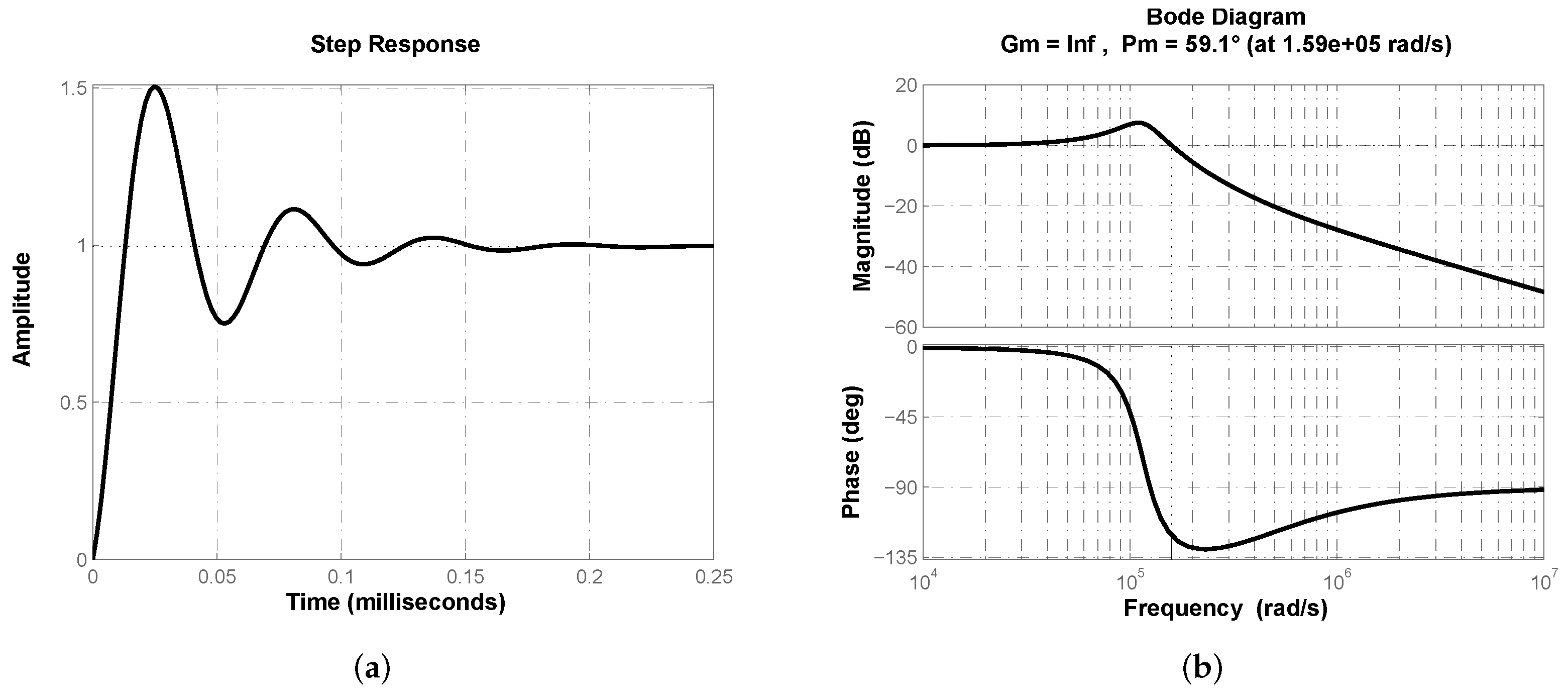
vary from the previous case, thus it is necessary to validate they are appropriate. In
Figure 9a the output of buck converter regulated with fractional-order PD controller approximation (
19) is shown. System’s frequency response is shown in
Figure 9b to corroborate desired phase margin
°. Note that despite small variations of the values, output behavior and frequency responses are very similar.
Electrical simulations allow us to determine effectiveness of the results obtained from second minimization criterion
.
Figure 10 shows converter output voltage
, inductor current
and control law
as in the previous case. Smooth convergence of converter output voltage and inductor current that corroborates continuous conduction mode are shown in
Figure 10a. Evolution of control law to its average value and the corresponding effect on the PWM signal are shown in
Figure 10b.
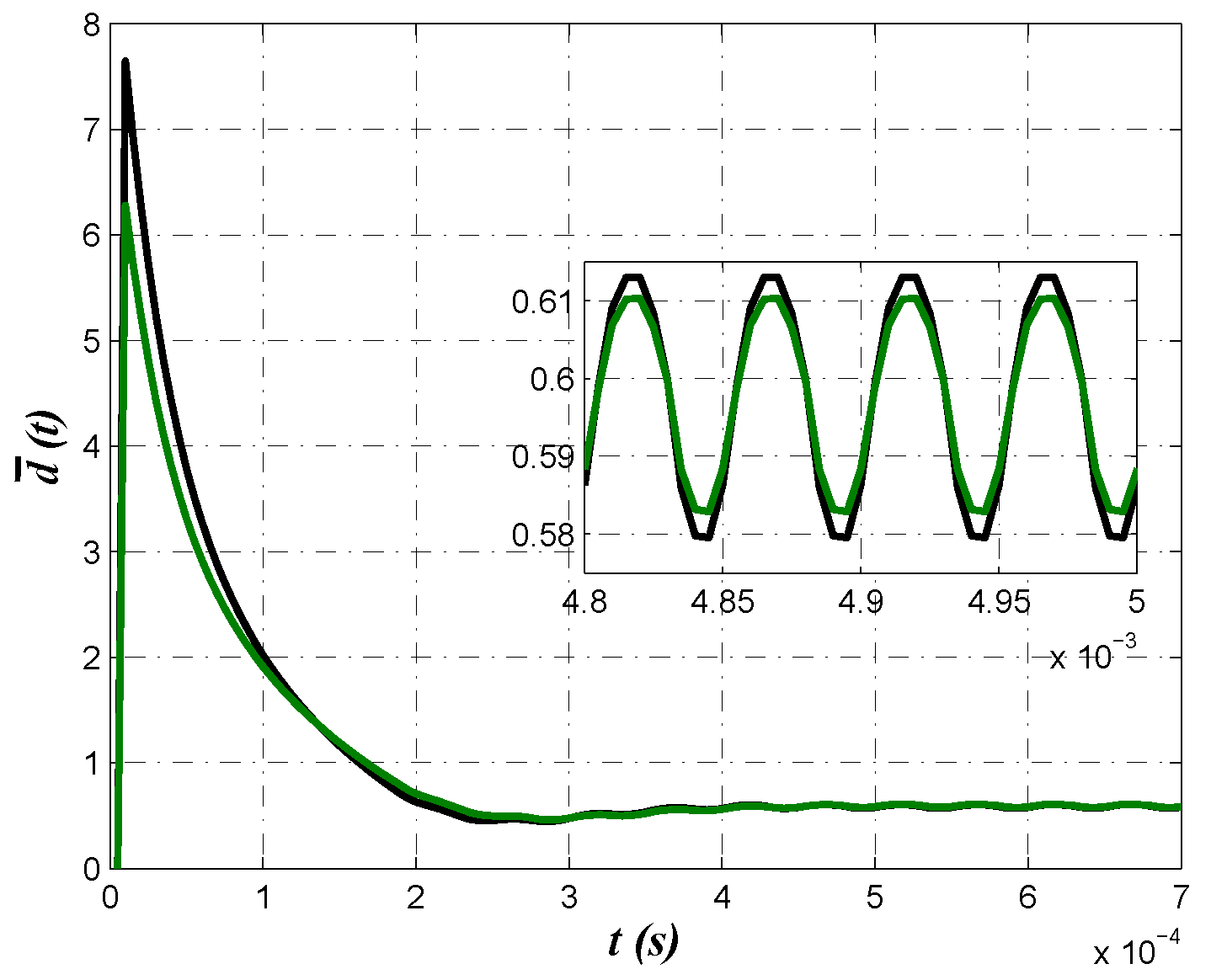
A comparison between control laws obtained from minimization of criteria
and
are shown in
Figure 11. Note that despite behavior of output voltage shown in
Figure 8a and
Figure 10a are very similar, control law produced by minimization of the second criterion
was smaller. This is attributed to the values of resistance
and
, which are smaller for both optimization algorithm when minimizing
, which is the reason to choose these component values to be implemented.
In order to make evident the relevance, importance and impact of considering controller implementation viability in the optimization process, minimization of criteria
and
was performed without considering second constraint over
from (
11). In
Table 5 optimized parameters, controller coefficients and component value for (
12), (
19) and (
20) are summarized, severally.
As in the previous results, similarity between obtained parameter values is determined when comparing optimization algorithms for a particular minimization criterion. On the other hand, significant difference can be observed when comparing results between minimization criteria, particularly in derivative time constant
. Another singularity of these results is the obtained value for
, which resulted more than double the previous one. Recalling from
Section 2.2 that controller contribution can be within ±90°,
would imply that almost all the phase contribution of the biquadratic module is required, which would be imprecise if an uncontrolled plant such as (
2) with
° is under consideration.
Note that optimized parameter values for
,
and
resulted in a considerable increase for controller coefficients of structure (
19). It is worth noting the obtained values for controller gain
, which confirms that optimizing without restriction over the approximation order undoubtedly leads to the synthesis of a high-gain controller as previously stated. Remarkable differences can be observed in component values for partial fraction expansion (
20) and its corresponding implementation circuit from
Figure 6, where gains to generate first and third terms are considerably big, resulting in resistance values of M
.
Lastly, a comparison of the proposed approach with its integer-order counterpart allows us to determine that the fractional-order controller approximation represents an alternative to achieve voltage regulation in a buck converter. By using minimization criteria
,
and only the constraint on phase margin
from (
11), parameters of a classical PD controller were optimized with both algorithms. Optimization results are summarized in
Table 6 for
,
and the corresponding parameter values required to implement the PD controller, where
/
are input and feedback resistances of the operational amplifier generating the proportional model and
/
are input capacitor and feedback resistance for operational amplifier generating the derivative mode.
In
Figure 12a the closed-loop step response of buck converter transfer function (
2) with a classical PD controller
is shown.
Figure 12b depicts closed-loop system’s frequency response where desired phase margin
can be corroborated. Thus a comparison through performance parameters of both responses from
Figure 7a and
Figure 12a is valid and allows us to determine advantages of proposed approach.
Table 7 summarizes step response performance parameters for both control schemes, from which superiority of fractional-order PD controller approximation can be determined.
In the following section, experimental validation is provided as evidence of proposed approach effectiveness. As will be seen, behavior of output voltage
and control law
from
Figure 8 and
Figure 10 will be corroborated.
3.3. Experimental Results
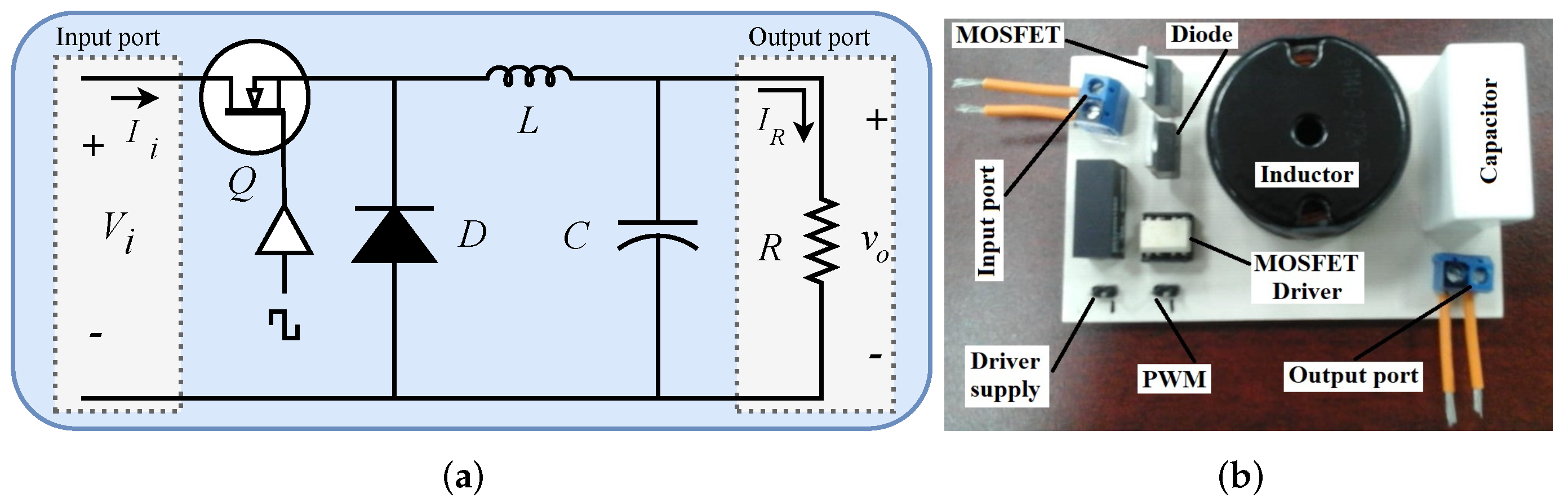
In this section, experimental results from the implementation of closed-loop control diagram shown in
Figure 2 will be provided, where the plant to be controlled is the buck converter of
Figure 1, whose input-to-output relation is given by (
2), and transfer function of controller fractional approximation given by (
19), whose electrical circuit is depicted in
Figure 6.
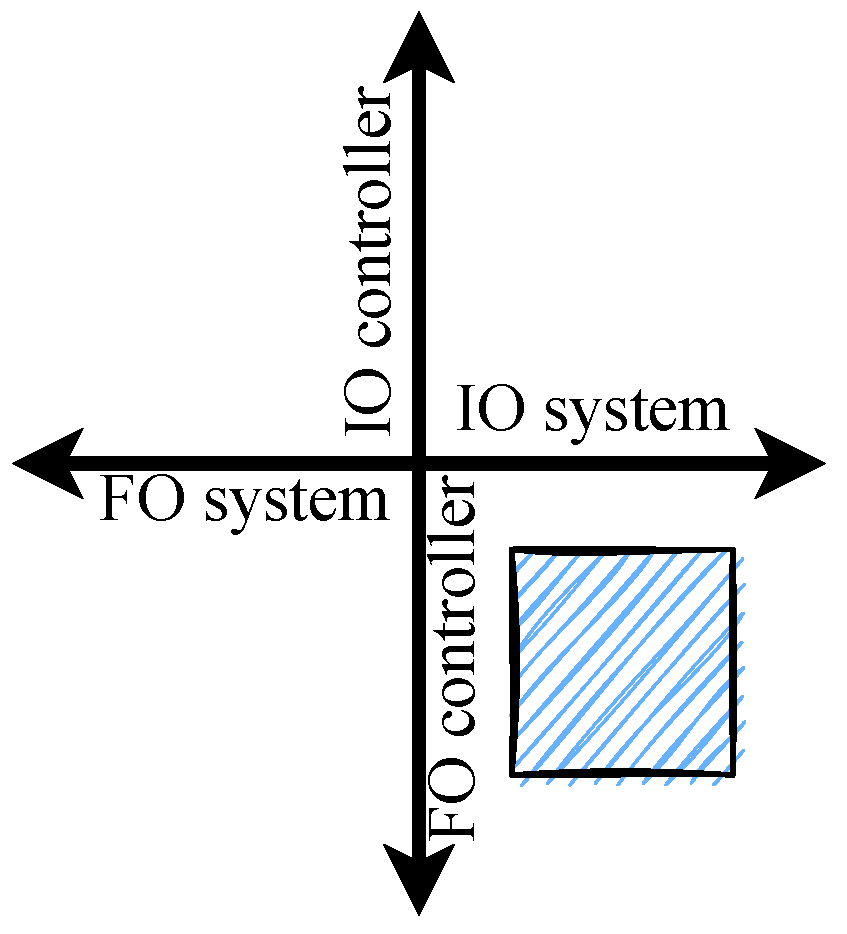
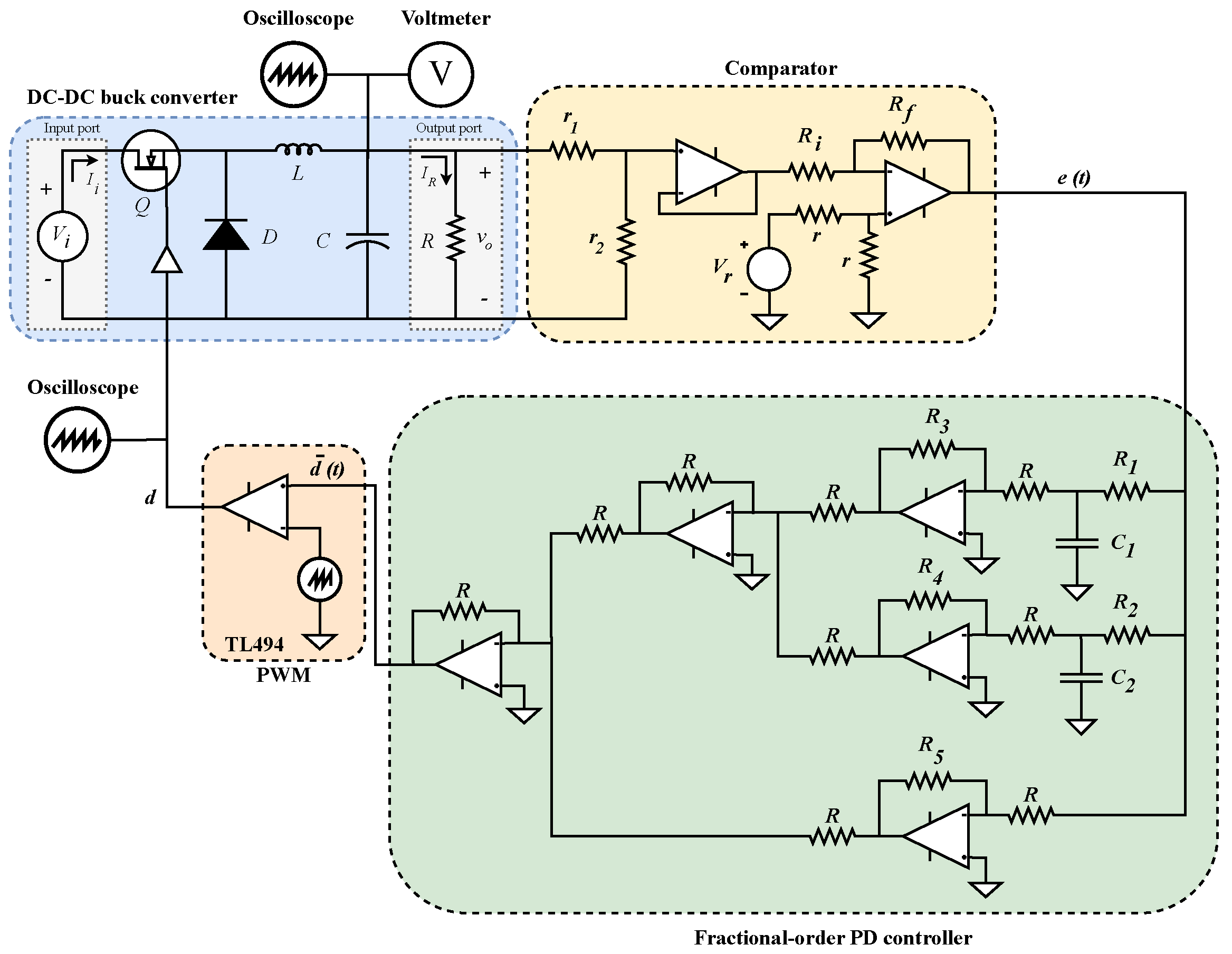
The electrical arrangement representing the physical implementation of the control diagram is depicted in
Figure 13. The plant to be controlled is the buck converter, implemented as previously described, shown in the blue square. Fractional-order approximation of PD controller is shown in the green square with its corresponding interconnections. The diagram’s comparison block is shown in the yellow square. Comparator was implemented through a voltage divider, where
k
,
k
to produce a gain of
, and an operational amplifier in difference configuration with resistance values
k
to generate
signal, where
V. A pulse-width-modulator control circuit TL494 was used for the PWM signal and a 4 MHz operational amplifiers LF347N for comparator and controller.
Voltage measurements were made with a four-channel Tektronix TDS 2024C oscilloscope. Current measurements were made with a Tektronix—A622 AC/DC 100 mV/A current probe.
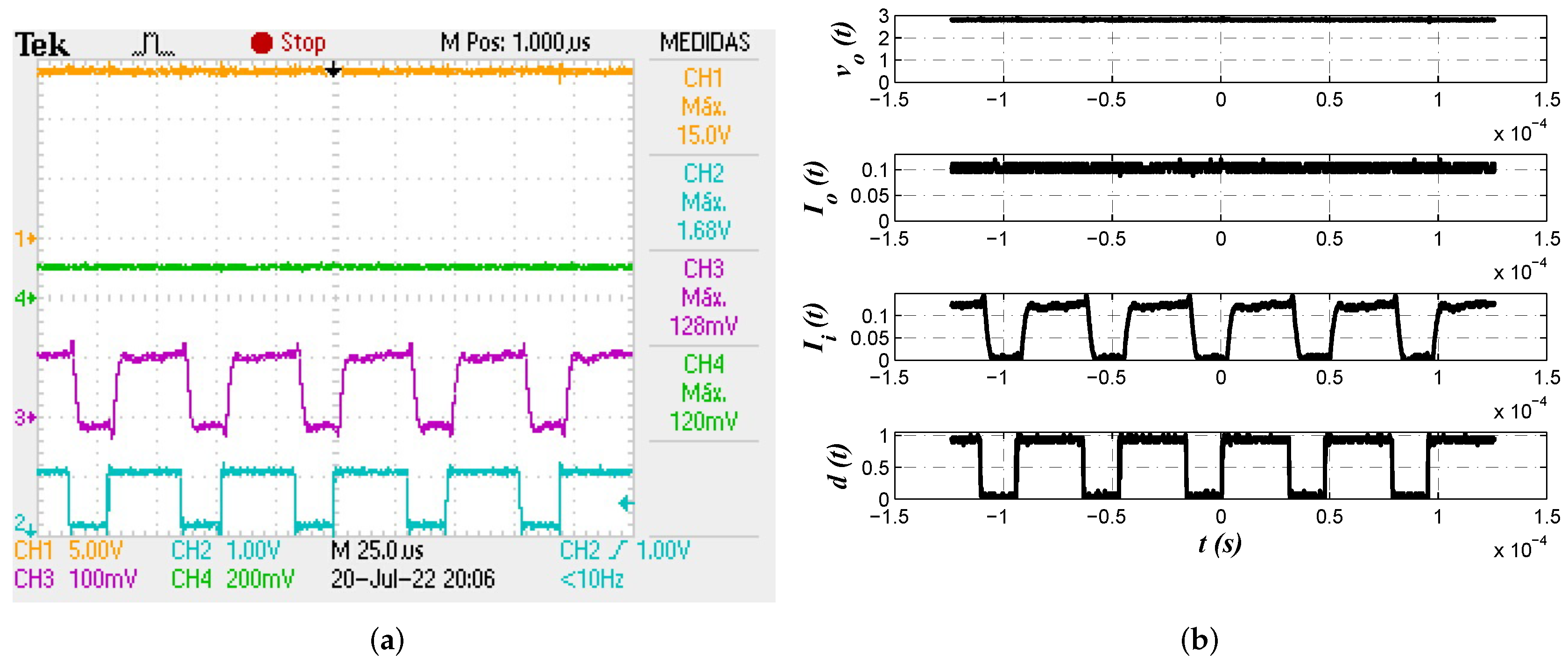
Voltage regulation was the first test performed over the circuit of experiment from
Figure 13. As previously stated, reference voltage was set to
V, which is expected to produce a voltage of
V in the converter. In
Figure 14a output voltage
, output current
, input current
and PWM signal
are shown. As one can see, the controller fractional approximation (
19) effectively achieved buck converter output to reach the specified value. In
Figure 14b an alternative view of measurements made from data exported is shown. Scales for
,
,
and
were preserved for comparative purposes.
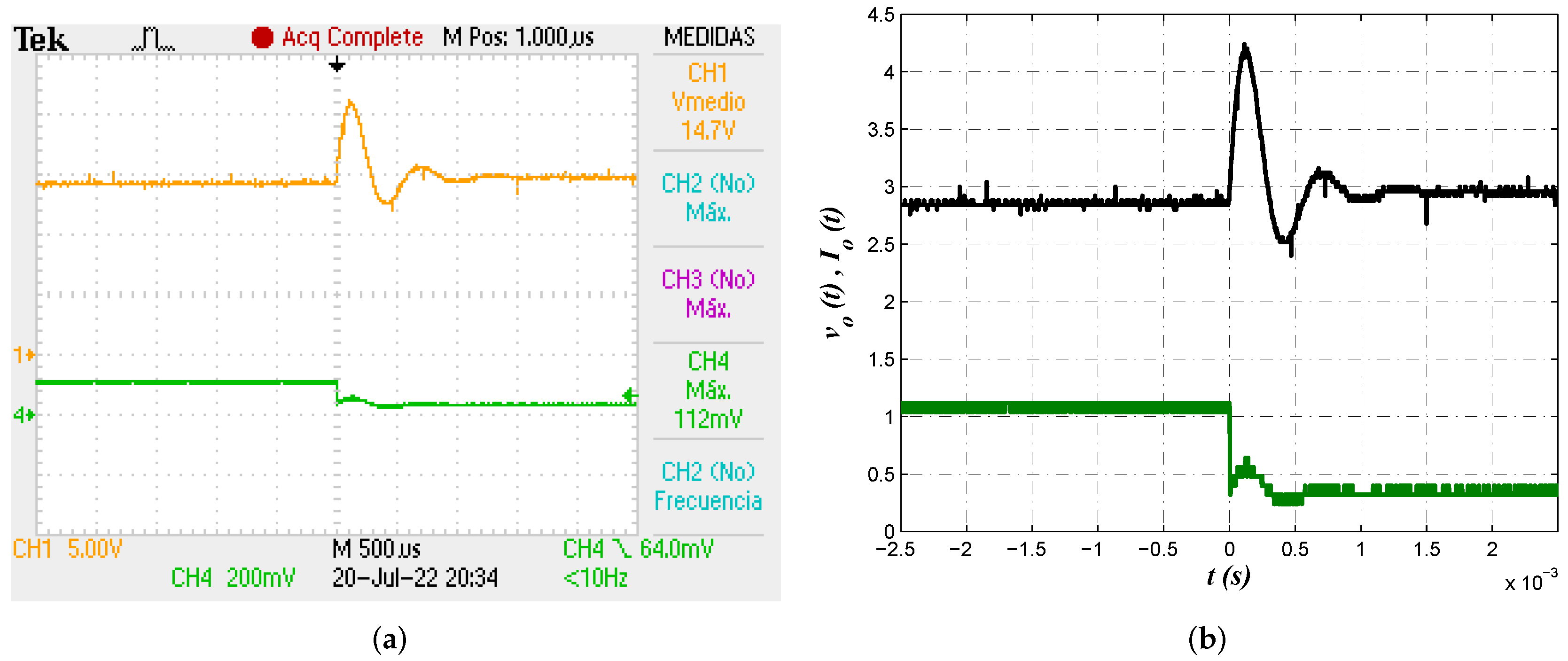
Second test performed over the implemented circuit was output regulation in the presence of load variation, for which the value of resistance was changed from
to
. The objective is to determine controller approximation’s effectiveness of keeping the voltage level at the reference value.
Figure 15 shows the evolution of output voltage
and load current
in the presence of load variation. Efficiency of proposed approach to return the output voltage to reference level was corroborated, since it took the controller about 1 ms to restore the voltage level.
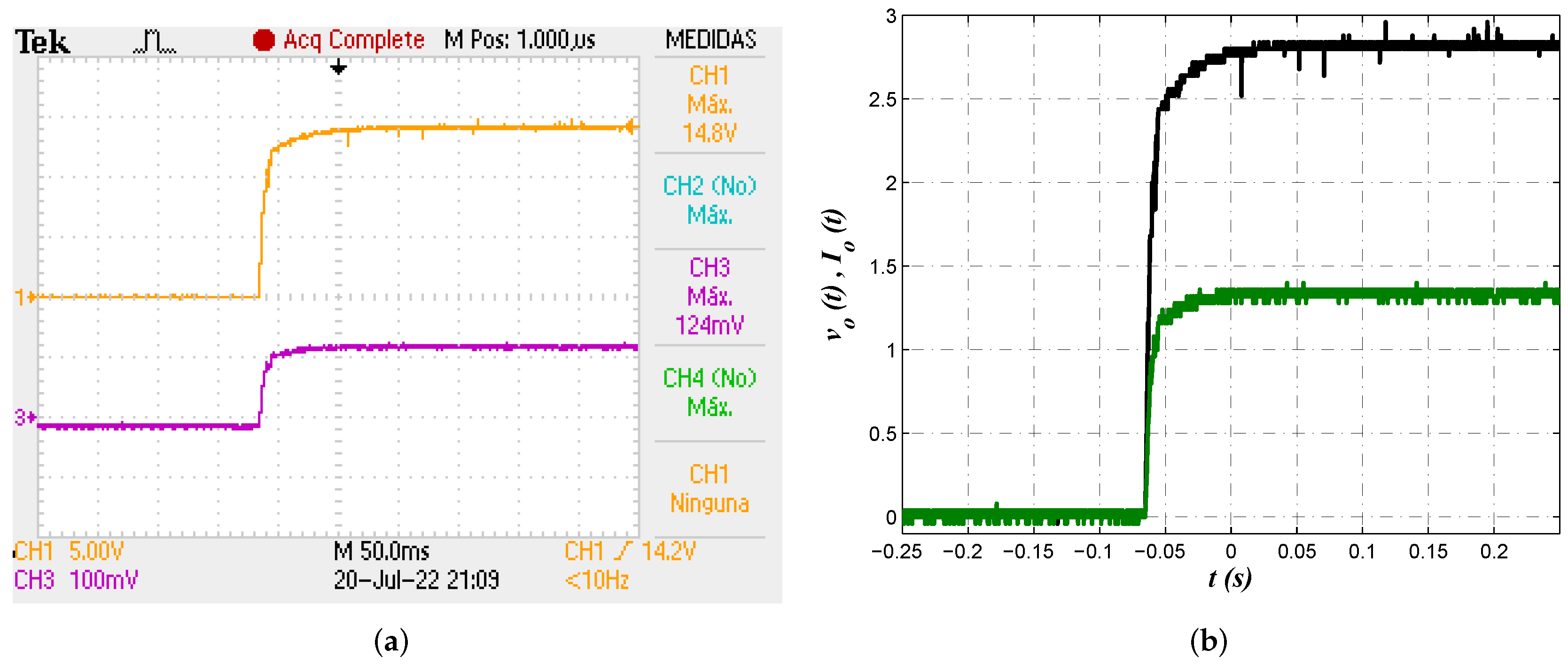
Lastly, the reference tracking characteristic of the system was tested to corroborate behavior described by numerical data provided in
Figure 8a and
Figure 10a. As was predicted by the results of electrical simulations, it is expected the output voltage
to evolve smoothly. In
Figure 16 the reference tracking characteristic of output voltage
can be confirmed through experimental measurements. Stable regulation and smooth convergence to the reference value can be observed.
Relevant results from the section can be summarized as follows: firstly, the proposal of as minimization criterion, which focuses on the difference between reference and output in steady state rather than its accumulated value. Note that it is entirely defined as function of controller and plant parameters which makes it easier to compute. Tightly related are the proposed constraints, which seek to guarantee closed-loop system’s robustness through , but limiting it in such a way that viability of controller’s implementation is not compromised, thus preventing from synthesizing high-gain controllers that produce saturated control laws. Note that constraint imposed over is intended to ensure that controller phase contribution is limited only to what it is necessary to achieve . As was demonstrated through numerical simulation and experimental validation, the combination of both constraints derived in the synthesis of an implementable fractional-order PD controller approximation, which effectively regulated output voltage of a buck converter.
Secondly, from
Table 2 one can conclude that combination of two optimization algorithms with two different minimization criteria allows us to corroborate that both methods converge to a neighborhood of the point in search space that produces the minimum value for the criteria, since
and
are very similar between algorithms. On the other hand, a small differences can be observed in
and
when comparing between
and
.
Thirdly, from
Table 3 coefficient values of controller transfer function (
19) for denominator are equal regardless the optimization algorithm or minimization criteria. Numerator coefficients of (
19) vary slightly between
and
but are very similar when comparing optimization algorithms. Note that biggest difference is in controller’s gain
, being proposed criterion
the one that leads to the smallest value.
These similarities resulted in controller component values of
Table 4, from which can be seen that
networks can be generated with the same resistance values
and
regardless optimization algorithm or minimization criterion. On the other side, resistance values
,
and
are very similar between algorithms and with small variations when comparing minimization criteria. By analyzing controller structure of
Figure 6 and component values from
Table 4 one can determine that required derivative effect is generated by
and
while proportional effect by
, whose value is directly related with controller’s gain
.
In the following sections some discussion on the presented results and conclusions are provided.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}