Development Trends and Perspectives of Future Sensors and MEMS/NEMS

 ,
, 
Abstract
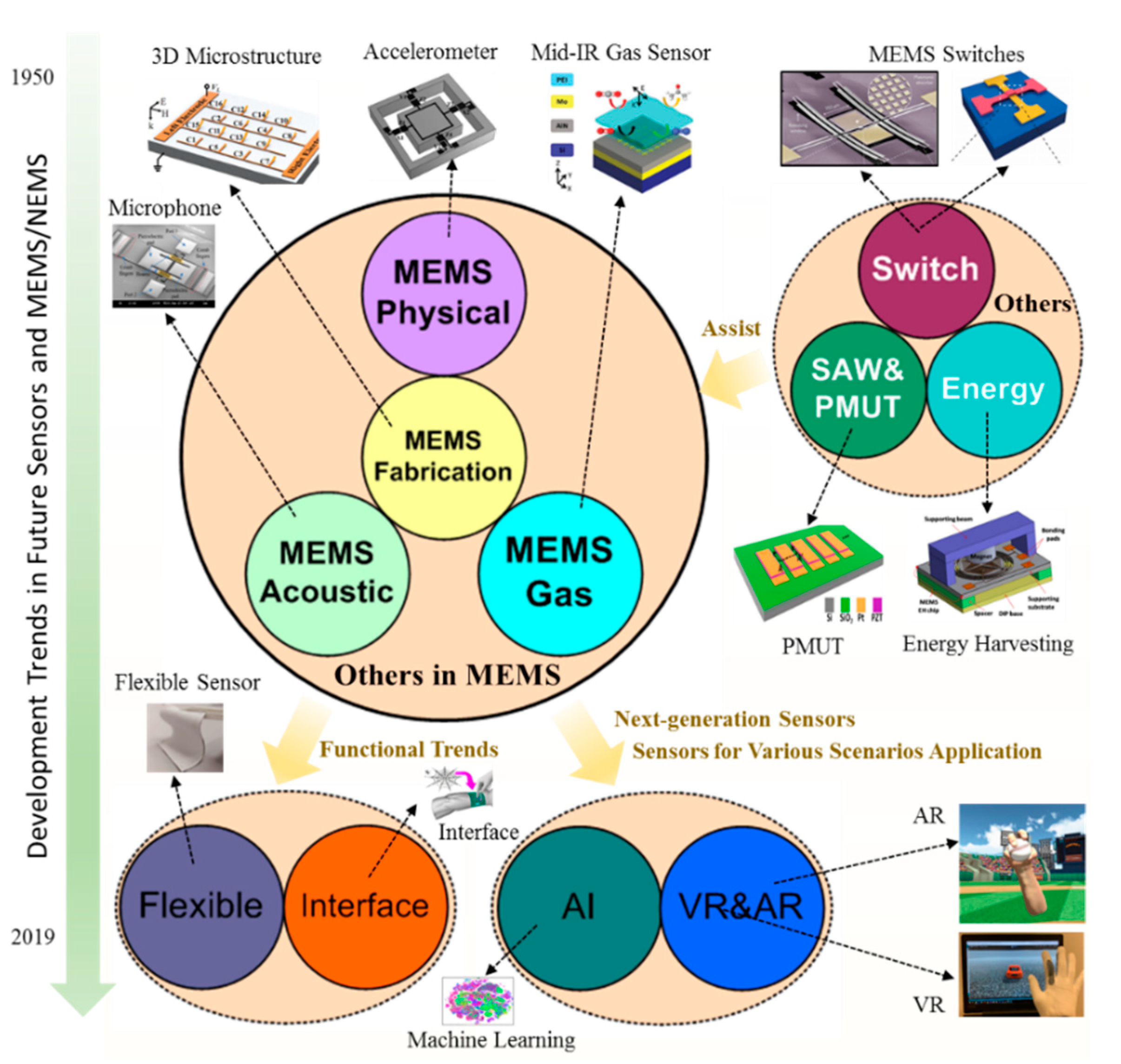
:1. Introduction
2. MEMS Sensor in Internet of Things (IoTs) Application
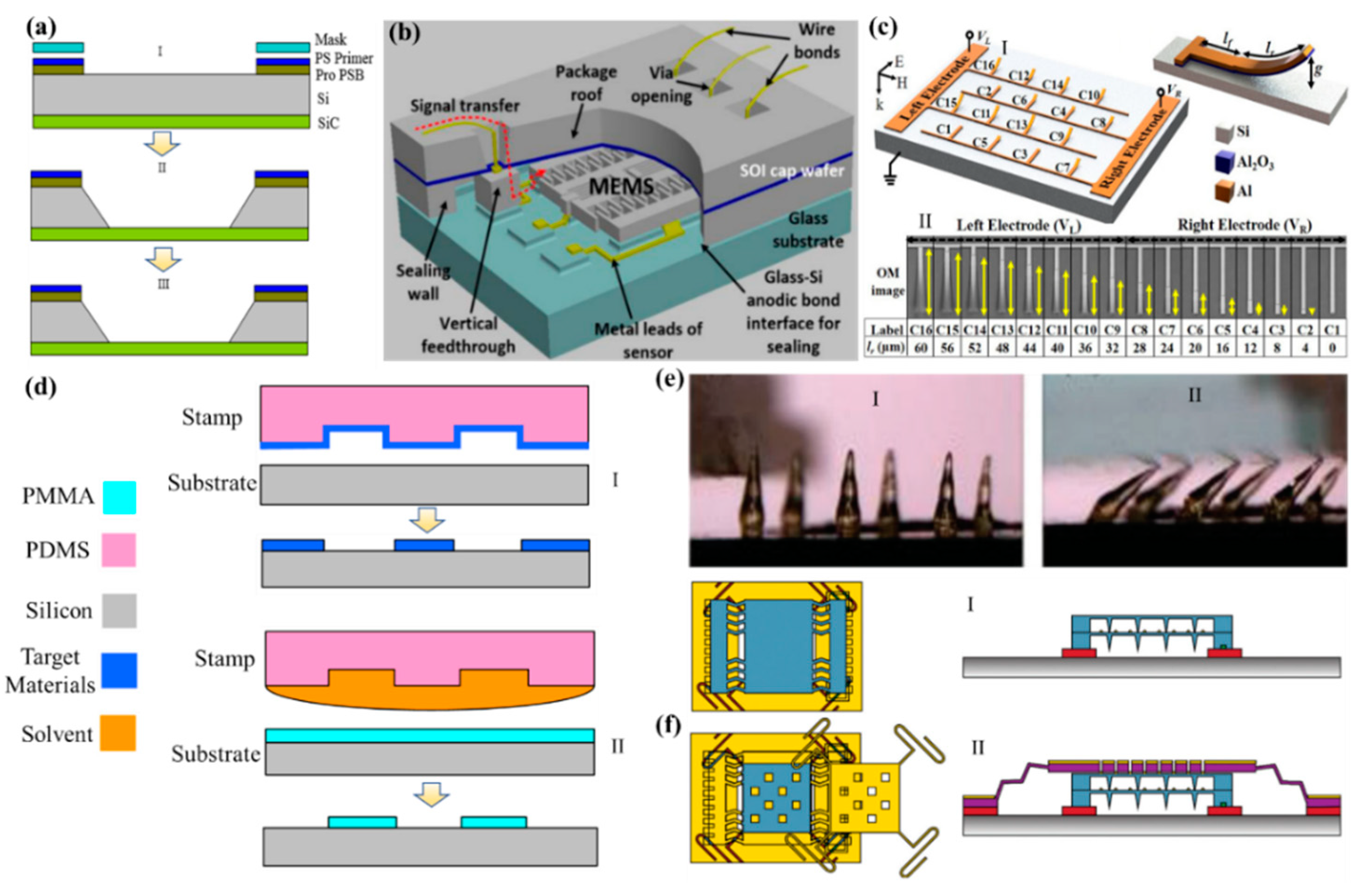
2.1. MEMS Fabrication
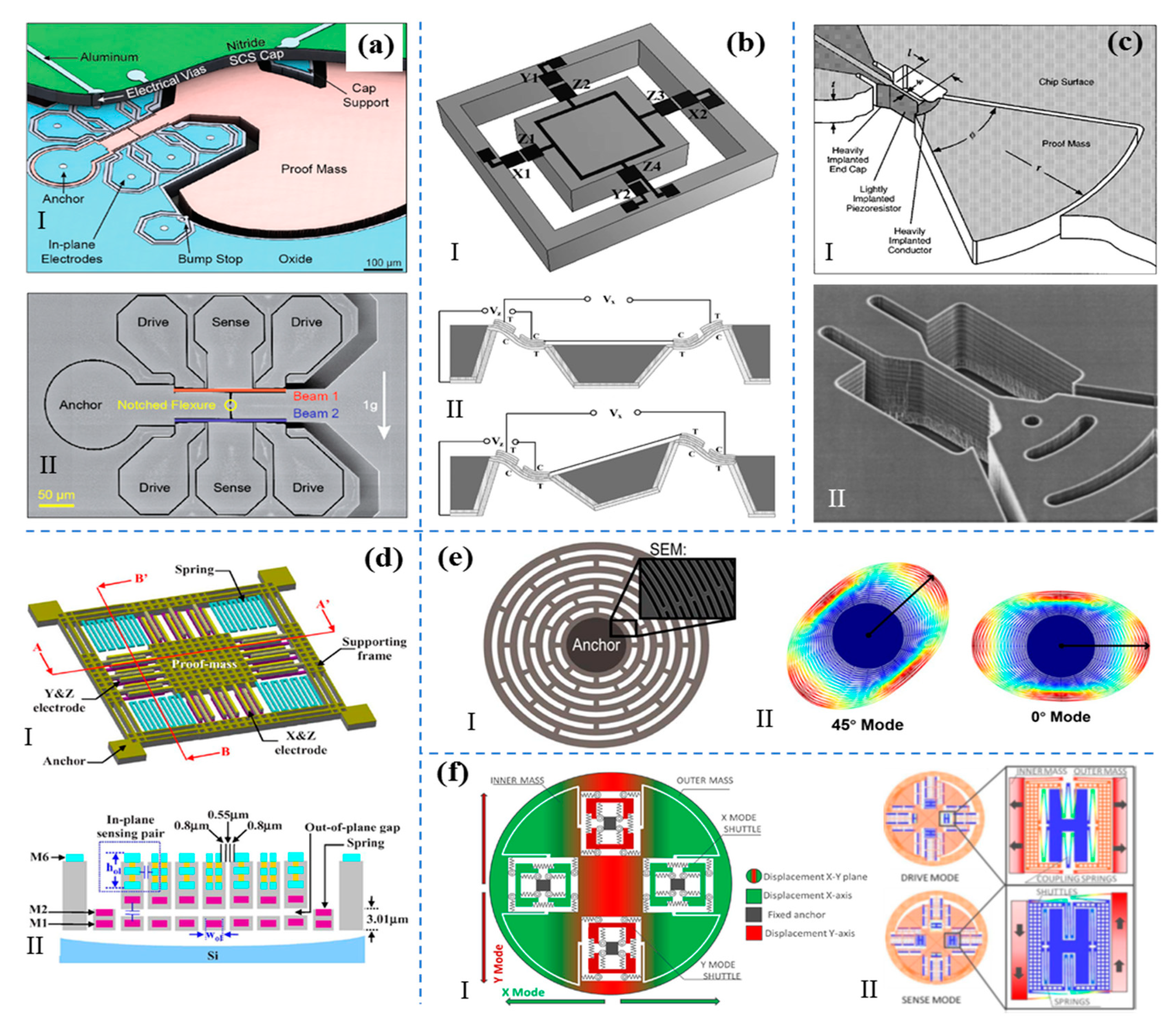
2.2. MEMS Physical Sensor
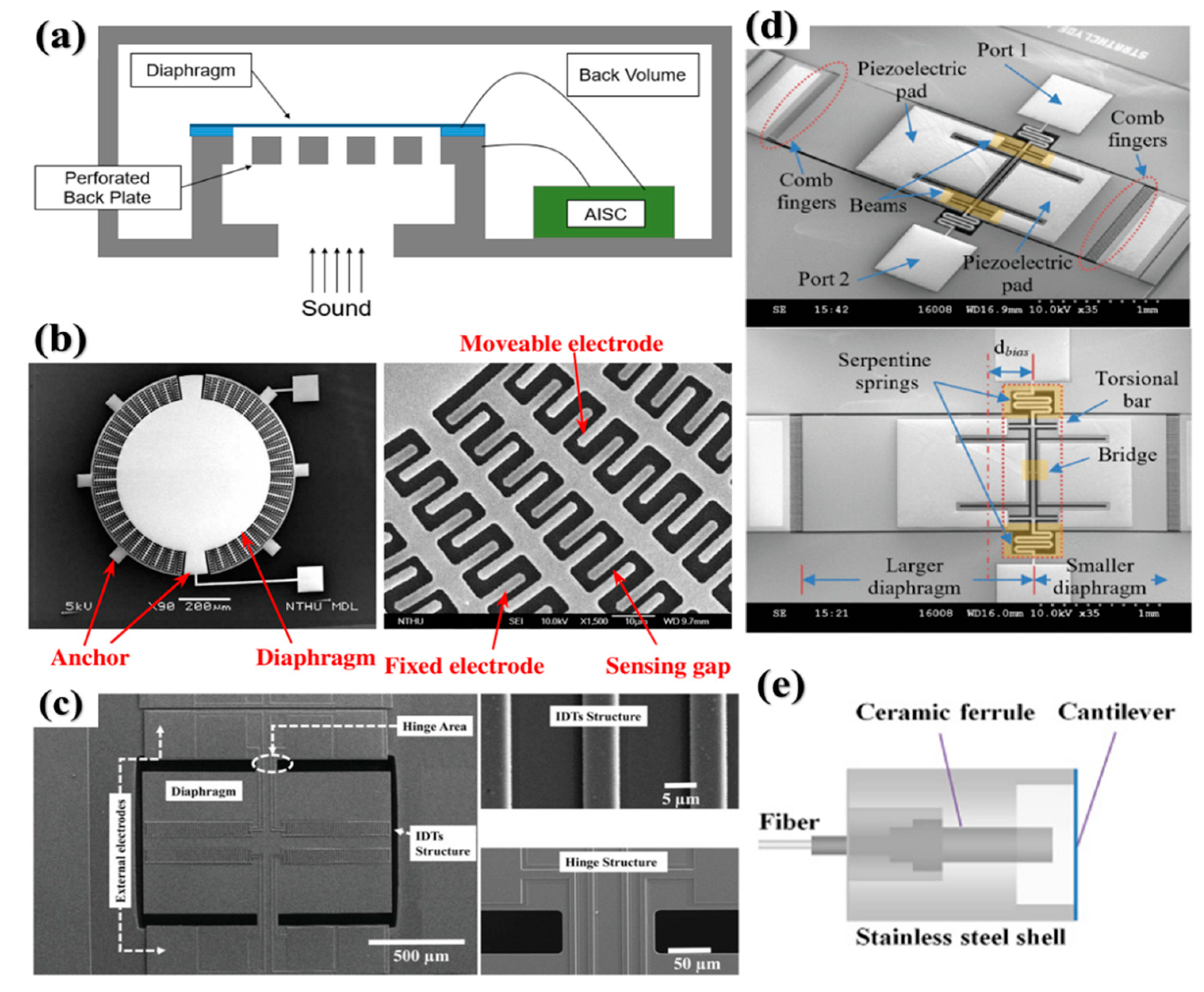
2.3. MEMS Acoustic Sensor
2.4. MEMS Gas Sensor
3. MEMS Component in Future Sensor
3.1. MEMS Switch
3.2. MEMS Surface Acoustic Wave (SAW) and Piezoelectric Micromachined Ultrasonic Transducer (PMUT)
3.3. MEMS Energy Harvesting
4. MEMS/NEMS in Flexible and Interface
4.1. Flexible Sensor
4.2. Interface of Sensor
5. MEMS/NEMS vs. AI and Its VR and AR
5.1. MEMS vs AI
5.2. Toward VR and AR
6. Outlooks and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Sun, Y.; Dong, Y.; Gao, R.; Chu, Y.; Zhang, M.; Qian, X.; Wang, X. Wearable pulse wave monitoring system based on MEMS sensors. Micromachines 2018, 9, 90. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lee, C.; Radhakrishnan, R.; Chen, C.-C.; Li, J.; Thillaigovindan, J.; Balasubramanian, N. Design and modeling of a nanomechanical sensor using silicon photonic crystals. J. Light. Technol. 2008, 26, 839–846. [Google Scholar] [CrossRef] [Green Version]
- Lam, K.; Leo, M.; Lee, C.; Liang, G. Design evaluation of graphene nanoribbon nanoelectromechanical devices. J. Appl. Phys. 2011, 110, 024302–024308. [Google Scholar] [CrossRef]
- Koh, K.; Kobayashi, T.; Lee, C. Investigation of piezoelectric driven MEMS mirrors based on single and double s-shaped PZT actuator for 2-D scanning applications. Sens. Actuators A Phys. 2012, 184, 149–159. [Google Scholar] [CrossRef]
- Stange, A.; Imboden, M.; Javor, J.; Barrett, L.; Bishop, D. Building a casimir metrology platform with a commercial MEMS sensor. Microsyst. Nanoeng. 2019, 5, 14. [Google Scholar] [CrossRef]
- Soon, B.; Ng, E.; Hong, V.; Yang, Y.; Ahn, C.; Qian, Y.; Kenny, T.; Lee, C. Fabrication and characterization of a vacuum encapsulated curved beam switch for harsh environment application. IEEE/ASME J. Microelectromech. Syst. 2014, 23, 1021–1030. [Google Scholar] [CrossRef]
- Zhang, S.; Wang, T.; Lou, L.; Tsang, W.; Sawada, R.; Kwong, D.; Lee, C. Annularly grooved diaphragm pressure sensor with embedded silicon nanowires for low pressure application. IEEE/ASME J. Microelectromech. Syst. 2014, 23, 1396–1407. [Google Scholar] [CrossRef]
- Lee, C.; Hsiao, F.L.; Kobayashi, T.; Koh, K.H.; Ramana, P.V.; Xiang, W.; Yang, B.; Tan, C.W.; Pinjala, D. A 1-V operated MEMS variable optical attenuator using piezoelectric PZT thin-film actuators. IEEE J. Sel. Topics Quantum Electron. 2009, 15, 1529–1536. [Google Scholar]
- Lee, C.; Yeh, J.A. Development and evolution of MOEMS technology in variable optical attenuators. J. Micro/Nanolithogr. MEMS MOEMS 2008, 7, 021003. [Google Scholar]
- Lee, C.; Wu, C.Y. Study of electrothermal V-beam actuators and latched mechanism for optical switch. J. Micromech. Microeng. 2005, 15, 11–19. [Google Scholar] [CrossRef]
- Lee, C. Progress in wafer level MEMS packaging. J. Jpn. Inst. Electron. Packag. 2007, 10, 42–51. [Google Scholar] [CrossRef]
- Lee, C.; Huang, R. Advances in MEMS based planar VOA. J. Semicond. Technol. Sci. 2007, 7, 183–195. [Google Scholar] [CrossRef] [Green Version]
- Marauska, S.; Claus, M.; Lisec, T.; Wagner, B. Low temperature transient liquid phase bonding of Au/Sn and Cu/Sn electroplated material systems for MEMS wafer-level packaging. Microsyst. Technol. 2013, 19, 1119–1130. [Google Scholar] [CrossRef]
- Xie, J.; Lee, C.; Wang, M.; Liu, Y.; Feng, H. Characterization of heavily doped polysilicon films for CMOS-MEMS thermoelectric power generators. J. Micromech. Microeng. 2009, 19, 125029. [Google Scholar] [CrossRef] [Green Version]
- Yang, B.; Lee, C.; Kotlanka, R.; Xie, J.; Lim, S. A MEMS rotary comb mechanism for harvesting kinetic energy of planar vibrations. J. Micromech. Microeng. 2010, 20, 065017. [Google Scholar] [CrossRef] [Green Version]
- Lee, C.; Yu, A.; Yan, L.; Wang, H.; He, J.; Zhang, Q.; Lau, J. Characterization of intermediate In/Ag layers of low temperature fluxless solder based wafer bonding for MEMS packaging. Sens. Actuators A 2009, 154, 85–91. [Google Scholar] [CrossRef]
- Lee, C.; Lim, Y.; Yang, B.; Kotlanka, R.; Heng, C.; He, J.; Tang, M.; Xie, J.; Feng, H. Theoretical comparison of the energy harvesting capability among various electrostatic mechanisms from structure aspect. Sens. Actuators A 2009, 156, 208–216. [Google Scholar] [CrossRef]
- Koh, K.; Lee, C.; Kobayashi, T. A piezoelectric-driven three-dimensional MEMS VOA using attenuation mechanism with combination of rotational and translation Effects. IEEE/ASME J. Microelectromech. Syst. 2010, 19, 1370–1379. [Google Scholar] [CrossRef]
- Wang, N.; Tsai, J.; Hsiao, F.; Soon, B.; Kwong, D.; Palaniapan, M.; Lee, C. Experimental investigation of a cavity-mode resonator using a micromachined two-dimensional silicon phononic crystal in a square lattice. IEEE Electron Device Lett. 2011, 32, 821–823. [Google Scholar] [CrossRef] [Green Version]
- Xie, J.; Lee, C.; Feng, H. Design, Fabrication and characterization of CMOS MEMS-based thermoelectric power generators. IEEE/ASME J. Microelectromech. Syst. 2010, 19, 317–324. [Google Scholar] [CrossRef]
- Xie, J.; Lee, C.; Wang, M.; Tsai, J. Microstructures for characterization of seebeck coefficient of doped polysilicon films. Microsyst. Technol. 2011, 17, 77–83. [Google Scholar] [CrossRef]
- Xie, J.; Lee, C.; Wang, M.; Fang, H. Seal and encapsulate cavities for CMOS MEMS thermoelectric power generators. J. Vac. Sci. Technol. B 2011, 29, 021401. [Google Scholar] [CrossRef]
- Li, B.; Hsiao, F.; Lee, C. Computational characterization of photonic crystal cantilever sensor using hexagonal dual-nano-ring based channel drop filter. IEEE Trans. Nanotechnol. 2011, 10, 789–796. [Google Scholar] [CrossRef]
- Koh, K.; Kobayashi, T.; Xie, J.; Yu, A.; Lee, C. Novel piezoelectric actuation mechanism for a gimbal-less mirror in 2D raster scanning applications. J. Micromech. Microeng. 2011, 21, 075001. [Google Scholar] [CrossRef] [Green Version]
- Li, B.; Lee, C. NEMS diaphragm sensors integrated with triple nano ring resonator. Sens. Actuators A Phys. 2011, 172, 61–68. [Google Scholar] [CrossRef]
- Lou, L.; Park, W.; Zhang, S.; Lim, L.; Kwong, D.; Lee, C. Characterization of silicon nanowire embedded in a MEMS diaphragm structure within large compressive strain range. IEEE Electron Device Lett. 2011, 32, 1764–1766. [Google Scholar] [CrossRef] [Green Version]
- Liang, G.; Lee, C.; Danner, A. Design of narrow band photonic filter with compact MEMS for tunable resonant wavelength ranging 100 nm. AIP Adv. 2011, 1, 042171. [Google Scholar] [CrossRef]
- Noraini, M.; Burhanuddin, Y.; Faisal, M.; Azrul, A. The fabrication of back etching 3C-SiC-on-Si diaphragm employing KOH + IPA in MEMS capacitive pressure sensor. Microsyst. Technol. 2015, 21, 1651–1661. [Google Scholar]
- Torunbalci, M.; Alper, S.; Akin, T. A method of fabricating vacuum packages with vertical feedthroughs in a wafer level anodic bonding process. Procedia Eng. 2014, 87, 887–890. [Google Scholar] [CrossRef] [Green Version]
- Hong, H.; Chen, C.; Chou, Y.; Lin, C. Study of novel electrical routing and integrated packaging on bio-compatible flexible substrates. Microsyst. Technol. 2010, 16, 423–430. [Google Scholar]
- Shih, K.; Pitchappa, P.; Manjappa, M.; Ho, C.P.; Singh, R.; Yang, B.; Singh, N.; Lee, C. Active MEMS metamaterials for THz bandwidth control. Appl. Phys. Lett. 2017, 110, 161108. [Google Scholar] [CrossRef]
- Cong, L.; Pitchappa, P.; Wu, Y.; Ke, L.; Lee, C.; Singh, N.; Yang, H.; Singh, R. Active multifunctional microelectromechanical system metadevices: Applications in polarization control, wavefront deflection, and holograms. Adv. Opt. Mater. 2017, 5, 1600716. [Google Scholar] [CrossRef]
- Qin, D.; Xia, Y.; Whitesides, G. Soft lithography for micro- and nanoscale patterning. Nat. Protoc. 2010, 5, 491–502. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mansoor, M.; Haneef, I.; Luca, A.; Coull, J.; Udrea, F. A maskless etching technique for fabrication of 3D MEMS structures in SOI CMOS devices. J. Micromech. Microeng. 2018, 28, 085013. [Google Scholar] [CrossRef]
- Wang, H.; Pastorin, G.; Lee, C. Toward self-powered wearable adhesive skin patch with bendable microneedle array for transdermal drug delivery. Adv. Sci. 2016, 3, 1500441. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yu, D.Q.; Yan, L.L,; Lee, C.; Choi, W.K.; Thew, S.; Foo, C.K,; Lau, J.H. Wafer-level hermetic bonding using Sn/In and Cu/Ti/Au metallization. IEEE Trans. Compon. Packag. Technol. 2009, 32, 926–934. [Google Scholar]
- Reeves, J.; Jayne, R.; Barrett, L.; White, A.; Bishop, D. Fabrication of multi-material 3D structures by the integration of direct laser writing and MEMS stencil patterning. Nanoscale 2019, 11, 3261–3267. [Google Scholar] [CrossRef] [Green Version]
- Wang, M.; Ji, B.; Gu, X.; Guo, Z.; Wang, X.; Yang, B.; Li, C.; Liu, J. A novel assembly method for 3-dimensional microelectrode array with micro-drive. Sens. Actuators B 2018, 264, 100–109. [Google Scholar] [CrossRef]
- Shin, D.; Ahn, C.; Chen, Y.; Christensen, D.; Flader, I.; Kenny, T. Environmentally robust differential resonant accelerometer in a wafer-scale encapsulation process. In Proceedings of the IEEE 30th International Conference on Micro Electro Mechanical Systems (MEMS), Las Vegas, NV, USA, 22–26 January 2017; pp. 17–20. [Google Scholar]
- Flader, I.B.; Chen, Y.; Yang, Y.; Ng, E.J.; Shin, D.D.; Heinz, D.B.; Ortiz, L.C.; Alter, A.L.; Park, W.; Goodson, K.E.; et al. Micro-tethering for fabrication of encapsulated inertial sensors with high sensitivity. J. Microelectromech. Syst. 2019, 28, 372–381. [Google Scholar] [CrossRef]
- Seshia, A.; Palaniapan, M.; Roessig, T.A.; Howe, R.T.; Gooch, R.W.; Schimert, T.R.; Montague, S. A vacuum packaged surface micromachined resonant accelerometer. J. Microelectromech. Syst. 2002, 11, 784–793. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Zhong, J.; Chang, H. A closed-loop mode-localized accelerometer. J. Microelectromech. Syst. 2018, 27, 210–217. [Google Scholar] [CrossRef]
- Zou, Q.; Tan, W.; Kim, E.S.; Loeb, G.E. Single- and triaxis piezoelectric-bimorph accelerometers. J. Microelectromech. Syst. 2008, 17, 45–57. [Google Scholar]
- Yang, J.; Zhang, M.; Si, C.; Han, G.; Ning, J.; Yang, F.; Wang, X. A T-shape aluminum nitride thin-film piezoelectric MEMS resonant accelerometer. J. Microelectromech. Syst. 2019, 28, 776–781. [Google Scholar] [CrossRef]
- Zhang, S.; Jiang, X.; Lapsley, M.; Moses, P.; Shrout, T.R. Piezoelectric accelerometers for ultrahigh temperature application. Appl. Phys. Lett. 2010, 96, 013506. [Google Scholar] [CrossRef]
- Partridge, A.; Reynolds, J.; Chui, B.; Chow, E.; Fitzgerald, A.; Zhang, L.; Maluf, N.; Kenny, T. A high-performance planar piezoresistive accelerometer. J. Microelectromech. Syst. 2000, 9, 58–66. [Google Scholar] [CrossRef]
- Amarasinghe, R.; Dao, D.; Toriyama, T.; Sugiyama, S. Development of miniaturized 6-axis accelerometer utilizing piezoresistive sensing elements. Sens. Actuators A Phys. 2007, 134, 310–320. [Google Scholar] [CrossRef]
- Dong, P.; Li, X.; Yang, H.; Bao, H.; Zhou, W.; Li, S.; Feng, S. High-performance monolithic triaxial piezoresistive shock accelerometers. Sens. Actuators A Phys. 2008, 141, 339–346. [Google Scholar] [CrossRef]
- Tsai, M.; Liu, Y.; Fang, W. A three-axis CMOS-MEMS accelerometer structure with vertically integrated fully differential sensing electrodes. J. Microelectromech. Syst. 2012, 21, 1329–1337. [Google Scholar] [CrossRef]
- Chae, J.; Kulah, H.; Najafi, K. A monolithic three-axis micro-g micromachined silicon capacitive accelerometer. J. Microelectromech. Syst. 2005, 14, 235–242. [Google Scholar] [CrossRef]
- Benmessaoud, M.; Nasreddine, M. Optimization of MEMS capacitive accelerometer. Microsyst. Technol. 2013, 19, 713–720. [Google Scholar] [CrossRef] [Green Version]
- Nitzan, S.; Zega, V.; Li, M.; Ahn, C.; Corigliano, A.; Kenny, T.; Horsley, D. Self-induced parametric amplification arising from nonlinear elastic coupling in a micromechanical resonating disk gyroscope. Sci. Rep. 2015, 5, 9036. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xia, D.; Huang, L.; Xu, L.; Gao, H. Structural analysis of disk resonance gyroscope. Micromachines 2017, 8, 296. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fan, B.; Guo, S.; Cheng, M.; Yu, L.; Zhou, M.; Hu, W.; Zheng, F.; Bu, F.; Xu, D. Frequency symmetry comparison of cobweb-like disk resonator gyroscope with ring-like disk resonator gyroscope. IEEE Electron Device Lett. 2019, 40, 1515–1518. [Google Scholar] [CrossRef]
- Giner, J.; Maeda, D.; Ono, K.; Shkel, A.; Sekiguchi, T. MEMS gyroscope with concentrated springs suspensions demonstrating single digit frequency split and temperature robustness. J. Microelectromech. Syst. 2019, 28, 25–35. [Google Scholar] [CrossRef]
- Sung, W.; Sung, S.; Lee, J.; Kang, T.; Lee, Y.; Lee, J. Development of a lateral velocity-controlled MEMS vibratory gyroscope and its performance test. J. Micromech. Microeng. 2008, 18, 055028. [Google Scholar] [CrossRef]
- Zhang, H.; Wei, X.; Ding, Y.; Jiang, Z.; Ren, J. A low noise capacitive MEMS accelerometer with anti-spring structure. Sens. Actuators A Phys. 2019, 296, 79–86. [Google Scholar] [CrossRef]
- Reddy, R.; Komeda, K.; Okamoto, Y.; Lebrasseur, E.; Higo, A.; Mita, Y. A zero-power sensing MEMS shock sensor with a latch-reset mechanism for multi-threshold events monitoring. Sens. Actuators A Phys. 2019, 295, 1–10. [Google Scholar] [CrossRef]
- Kamada, Y.; Isobe, A.; Oshima, T.; Furubayashi, Y.; Ido, T.; Sekiguchi, T. Capacitive MEMS accelerometer with perforated and electrically separated mass structure for low noise and low power. J. Microelectromech. Syst. 2019, 28, 401–408. [Google Scholar] [CrossRef]
- Yin, Y.; Fang, Z.; Liu, Y.; Han, F. Temperature-insensitive structure design of micromachined resonant accelerometers. Sensors 2019, 19, 1544. [Google Scholar] [CrossRef] [Green Version]
- Hiller, T.; Pentek, Z.; Liewald, J.; Buhmann, A.; Roth, H. Origins and mechanisms of bias instability noise in a three-axis mode-matched MEMS gyroscope. J. Microelectromech. Syst. 2019, 28, 586–596. [Google Scholar] [CrossRef]
- Shah, M.A.; Shah, I.A.; Lee, D.-G.; Hur, S. Design approaches of MEMS microphones for enhanced performance. J. Sens. 2019, 2019, 26. [Google Scholar] [CrossRef] [Green Version]
- Kim, D.; Hewa-Kasakarage, N.N.; Kuntzman, M.L.; Kirk, K.D.; Yoon, S.H.; Hall, N.A. Piezoelectric micromachined microphones with out-of-plane directivity. Appl. Phys. Lett. 2013, 103, 1–6. [Google Scholar] [CrossRef]
- Leinders, S.M.; Westerveld, W.J.; Pozo, J.; Van Neer, P.L.M.J.; Snyder, B.; O’Brien, P.; Urbach, H.P.; De Jong, N.; Verweij, M.D. A sensitive optical micro-machined ultrasound sensor (OMUS) based on a silicon photonic ring resonator on an acoustical membrane. Sci. Rep. 2015, 5, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Lo, S.C.; Lai, W.C.; Chang, C.I.; Lo, Y.Y.; Wang, C.; Bai, M.R.; Fang, W. Development of a no-back-plate SOI MEMS condenser microphone. In Proceedings of the Transducers—2015 18th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Anchorage, AK, USA, 21–25 June 2015; pp. 1085–1088. [Google Scholar]
- Kuntzman, M.L.; Hewa-Kasakarage, N.N.; Rocha, A.; Kim, D.; Hall, N.A. Micromachined in-plane pressure-gradient piezoelectric microphones. IEEE Sens. J. 2015, 15, 1347–1357. [Google Scholar] [CrossRef]
- Zhang, Y.; Bauer, R.; Whitmer, W.M.; Brimijoin, W.O.; Uttamchandani, D.; Windmill, J.F.C.; Jackson, J.C. Development of a biologically inspired MEMS microphone. In Proceedings of the 2017 IEEE Sensors, Glasgow, UK, 29 October–1 November 2017; pp. 1–3. [Google Scholar]
- Ishfaque, A.; Kim, B. Fly ormia ochracea inspired MEMS directional microphone: A review. IEEE Sens. J. 2018, 18, 1778–1789. [Google Scholar] [CrossRef]
- Rahaman, A.; Ishfaque, A.; Jung, H.; Kim, B. Bio-inspired rectangular shaped piezoelectric MEMS directional microphone. IEEE Sens. J. 2019, 19, 88–96. [Google Scholar] [CrossRef]
- Ishfaque, A.; Rahaman, A.; Kim, B. Bioinspired low noise circular-shaped MEMS directional microphone. J. Micro/Nanolithogr. MEMS MOEMS 2019, 18, 1. [Google Scholar] [CrossRef]
- Zhang, Y.; Bauer, R.; Jackson, J.C.; Whitmer, W.M.; Windmill, J.F.C.; Uttamchandani, D. A low-frequency dual-band operational microphone mimicking the hearing property of ormia ochracea. J. Microelectromech. Syst. 2018, 27, 667–676. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Bauer, R.; Whitmer, W.M.; Jackson, J.C.; Windmill, J.F.C.; Uttamchandani, D. A MEMS microphone inspired by ormia for spatial sound detection. In Proceedings of the 2018 IEEE Micro Electro Mechanical Systems (MEMS), Belfast, UK, 21–25 January 2018; pp. 253–256. [Google Scholar]
- Chen, K.; Yu, Z.; Yu, Q.; Guo, M.; Zhao, Z.; Qu, C.; Gong, Z.; Yang, Y. Fast demodulated white-light interferometry-based fiber-optic fabry–perot cantilever microphone. Opt. Lett. 2018, 43, 3417. [Google Scholar] [CrossRef]
- Wu, Y.; Yu, C.; Wu, F.; Li, C.; Zhou, J.; Gong, Y.; Rao, Y.; Chen, Y. A highly sensitive fiber-optic microphone based on graphene oxide membrane. J. Light. Technol. 2017, 35, 4344–4349. [Google Scholar] [CrossRef]
- Fischer, B. Optical microphone hears ultrasound. Nat. Photonics 2016, 10, 356–358. [Google Scholar] [CrossRef]
- Cho, M.; Zhu, J.; Kang, K.; Park, I. Half-pipe palladium nanotube network hydrogen sensor based on electrospun nanofiber scaffolds. In Proceedings of the 2019 20th International Conference on Solid-State Sensors, Actuators and Microsystems & Eurosensors, Berlin, Germany, 23–27 June 2019; pp. 1183–1186. [Google Scholar]
- Qiu, C.; Wu, F.; Shi, Q.; Lee, C.; Yuce, M. Sensors and control interface methods based on triboelectric nanogenerator in IoT applications. IEEE Access 2019, 7, 92745–92757. [Google Scholar] [CrossRef]
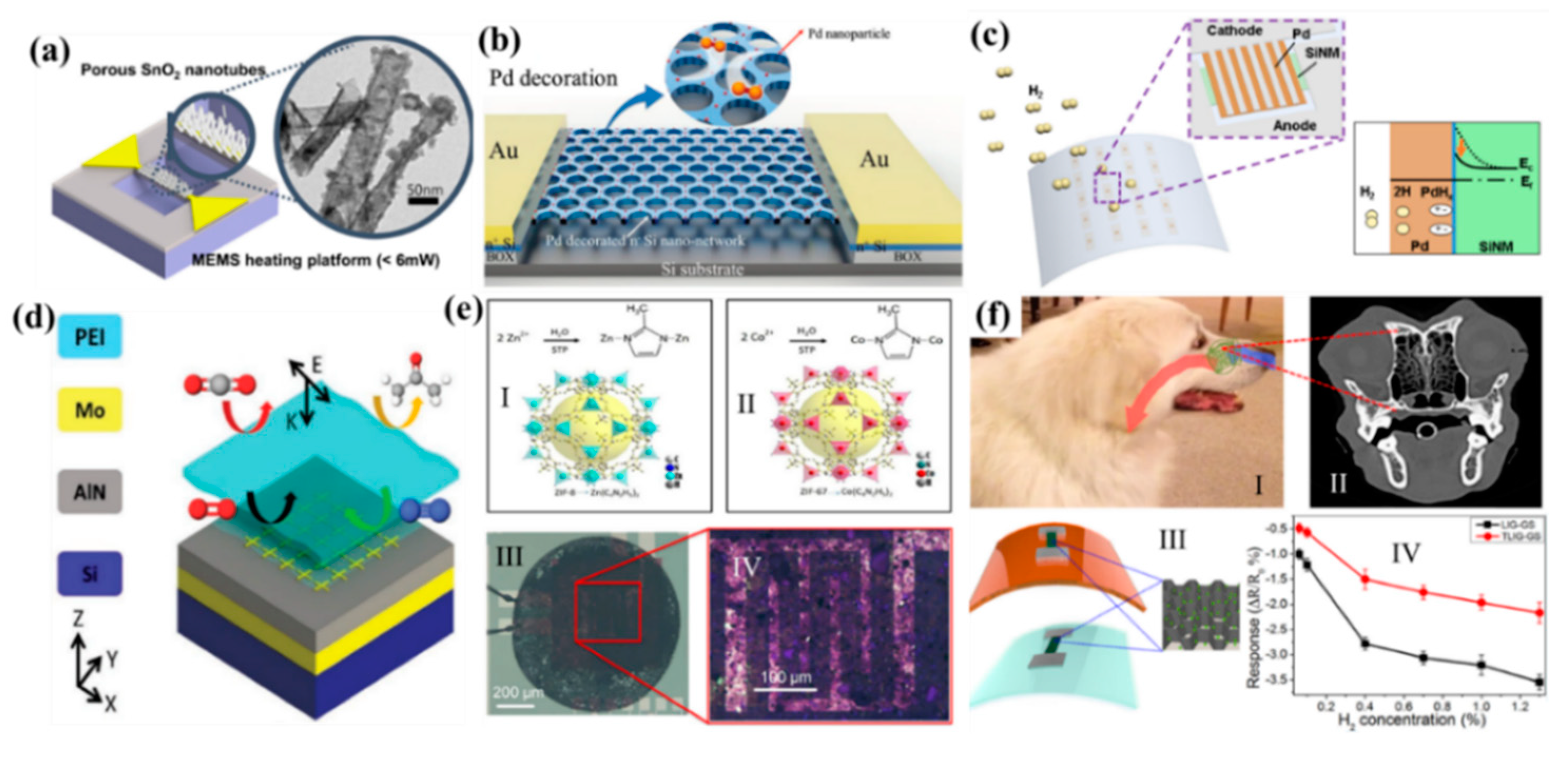
- Cho, I.; Kang, K.; Yang, D.; Yun, J.; Park, I. Localized liquid-phase synthesis of porous SnO2 nanotubes on MEMS platform for low-power, high performance gas sensors. Acs Appl. Mater. Interfaces 2017, 9, 27111–27119. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Urasinska-Wojcik, B.; Vincent, T.; Chowdhury, M.; Gardner, J. Ultrasensitive WO3 gas sensors for NO2 detection in air and low oxygen environment. Sens. Actuators B 2017, 239, 1051–1059. [Google Scholar] [CrossRef]
- Hoang, N.; Hung, C.; Hoa, N.; Duy, N.; Park, I.; Hieu, N. Excellent detection of H2S gas at ppb concentrations using ZnFe2O4 nanofibers loaded with reduced graphene oxide. Sens. Actuators B Chem. 2019, 282, 876–884. [Google Scholar] [CrossRef]
- Uddin, A.; Yaqoob, U.; Phan, D.; Chung, G. A novel flexible acetylene gas sensor based on PI/PTFE-supported Ag-loaded vertical ZnO nanorods array. Sens. Actuators B 2016, 222, 536–543. [Google Scholar] [CrossRef]
- Gao, M.; Cho, M.; Han, H.; Jung, Y.; Park, I. Palladium-decorated silicon nanomesh fabricated by nanosphere lithography for high performance, room temperature hydrogen sensing. Small 2018, 14, 1703691. [Google Scholar] [CrossRef]
- Cho, M.; Zhu, J.; Kim, H.; Kang, K.; Park, I. Half-pipe palladium nanotube-based hydrogen sensor using a suspended nanofiber scaffold. ACS Appl. Mater. Interfaces 2019, 11, 13343–13349. [Google Scholar] [CrossRef]
- Cho, M.; Yun, J.; Kwon, D.; Kim, K.; Park, I. High-sensitivity and low-power flexible schottky hydrogen sensor based on silicon nanomembrane. ACS Appl. Mater. Interfaces 2018, 10, 12870–12877. [Google Scholar] [CrossRef]
- Hasan, D.; Lee, C. Hybrid metamaterial absorber platform for sensing of CO2 gas at mid-IR. Adv. Sci. 2018, 5, 1700581. [Google Scholar] [CrossRef]
- Chang, Y.; Hasan, D.; Dong, B.; Wei, J.; Ma, Y.; Zhou, G.; Ang, K.; Lee, C. All-dielectric surface-enhanced infrared absorption-based gas sensor using guided resonance. ACS Appl. Mater. Interfaces 2018, 10, 38272–38279. [Google Scholar] [CrossRef] [PubMed]
- Matatagui, D.; Sainz-Vidal, A.; Gràcia, I.; Figueras, E.; Cané, C.; Saniger, J.M. Chemoresistive gas sensor based on ZIF-8/ZIF-67 nanocrystals. Sens. Actuators B Chem. 2018, 274, 601–608. [Google Scholar] [CrossRef]
- Leidinger, M.; Rieger, M.; Sauerwald, T.; Alépée, C.; Schütze, A. Integrated pre-concentrator gas sensor microsystem for ppb level benzene detection. Sens. Actuators B 2016, 236, 988–996. [Google Scholar] [CrossRef]
- Zhu, J.; Cho, M.; Li, Y.; Cho, I.; Suh, J.; Orbe, D.; Jeong, Y.; Ren, T.; Park, I. Biomimetic turbinate-like artificial nose for hydrogen detection based on 3D porous laser-induced graphene. ACS Appl. Mater. Interfaces 2019, 11, 24386–24394. [Google Scholar] [CrossRef]
- Bouchaala, A.; Jaber, N.; Yassine, O.; Shekhah, O.; Chernikova, V.; Eddaoudi, M.; Younis, M. Nonlinear-based MEMS sensors and active switches for gas detection. Sensors 2016, 16, 758. [Google Scholar] [CrossRef] [Green Version]
- Qian, Y.; Lou, L.; Julius Tsai, M.; Lee, C. A dual-silicon-nanowires based U-shape nanoelectromechanical switch with low pull-in voltage. Appl. Phys. Lett. 2012, 100, 113102. [Google Scholar] [CrossRef]
- Majumder, S.; Lampen, J.; Morrison, R.; Maciel, J. MEMS switches. IEEE Instrum. Meas. Mag. 2003, 6, 12–15. [Google Scholar] [CrossRef]
- Iannacci, J. Introduction to MEMS and RF-MEMS: From the early days of microsystems to modern RF-MEMS passives. In Rf-Mems Technology for High-Performance Passives; IOP Publishing Ltd.: Brtistol, UK, 2017; pp. 2053–2563. [Google Scholar]
- Xiang, W.; Lee, C. Nanoelectromechanical torsion switch of low operation voltage for nonvolatile memory application. Appl. Phys. Lett. 2010, 96, 5–7. [Google Scholar] [CrossRef]
- Rebeiz, G.M.; Muldavin, J.B. RF MEMS switches and switch circuits. IEEE Microw. Mag. 2001, 2, 59–71. [Google Scholar] [CrossRef]
- Soon, B.W.; Qian, Y.; Ng, E.J.; Hong, V.A.; Yang, Y.; Ahn, C.H.; Kenny, T.W.; Lee, C. Investigation of a vacuum encapsulated Si-to-Si contact microswitch operated from −60 °C to 400 °C. J. Microelectromech. Syst. 2015, 24, 1906–1915. [Google Scholar] [CrossRef]
- Soon, B.W.; Singh, N.; Tsai, J.M.; Lee, C. A Bistable silicon nanofin: An ideal device for nonvolatile memory applications. IEEE Nanotechnol. Mag. 2013, 7, 24–28. [Google Scholar] [CrossRef]
- Maharjan, L.; He, D.; Arbab, N.; Fahimi, B. Low Cost Drive for Switched Reluctance Machine Using Piezoelectric Actuators. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 7, 2232–2242. [Google Scholar] [CrossRef]
- Ishibashi, M.; Tanabe, R.; Shinshi, T.; Uehara, M. Electromagnetic-force-driving type mems switch using high performance NdFeB/Ta thin film permanent magnet. Proc. ASPE Annu. Meet. 2010, 50, 341–344. [Google Scholar]
- Cho, I.; Yoon, E. Design and fabrication of a single membrane push-pull SPDT RF MEMS switch operated by electromagnetic actuation and electrostatic hold. J. Micromech. Microeng. 2010, 20, 035028. [Google Scholar] [CrossRef] [Green Version]
- Qian, Z.; Kang, S.; Rajaram, V.; Cassella, C.; McGruer, N.; Rinaldi, M. Zero-power infrared digitizers based on plasmonically enhanced micromechanical photoswitches. Nat. Nanotechnol. 2017, 12, 969–973. [Google Scholar] [CrossRef]
- Sinha, N.; Wabiszewski, G.; Mahameed, R.; Felmetsger, V.; Tanner, S.; Carpick, R.; Piazza, G. Piezoelectric aluminum nitride nanoelectromechanical actuators. Appl. Phys. Lett. 2009, 95, 4–7. [Google Scholar] [CrossRef] [Green Version]
- Nordquist, C.; Olsson, R.; Scott, S.; Branch, D.; Pluym, T.; Yarberry, V. On/Off Micro-electromechanical switching of AlN piezoelectric resonators. In Proceedings of the 2013 IEEE MTT-S International Microwave Symposium Digest (MTT), Seattle, WA, USA, 2–7 June 2013; pp. 1–4. [Google Scholar]
- Sinha, N.; Jones, T.; Guo, Z.; Piazza, G. Body-biased complementary logic implemented using AlN piezoelectric MEMS switches. J. Microelectromech. Syst. 2012, 21, 484–496. [Google Scholar] [CrossRef]
- Rajaram, V.; Qian, Z.; Kang, S.; Calisgan, S.; McGruer, N.; Rinaldi, M. Zero-power electrically tunable micromechanical photoswitches. IEEE Sens. J. 2018, 18, 7833–7841. [Google Scholar] [CrossRef]
- Steiner, H.; Keplinger, F.; Schalko, J.; Hortschitz, W.; Stifter, M. Highly efficient passive thermal micro-actuator. J. Microelectromech. Syst. 2015, 24, 1981–1988. [Google Scholar] [CrossRef]
- Jang, J.E.; Cha, S.N.; Choi, Y.J.; Kang, D.J.; Butler, T.P.; Hasko, D.G.; Jung, J.E.; Kim, J.M.; Amaratunga, G.A.J. Nanoscale memory cell based on a nanoelectromechanical switched capacitor. Nat. Nanotechnol. 2008, 3, 26–30. [Google Scholar] [CrossRef]
- Wu, T.; Chen, G.; Cassella, C.; Zhu, W.Z.; Assylbekova, M.; Rinaldi, M.; McGruer, N. Design and fabrication of AlN RF MEMS switch for near-zero power RF wake-up receivers. In Proceedings of the 2017 IEEE Sensors, Glasgow, UK, 29 October–1 November 2017; Volume 18, pp. 1–3. [Google Scholar]
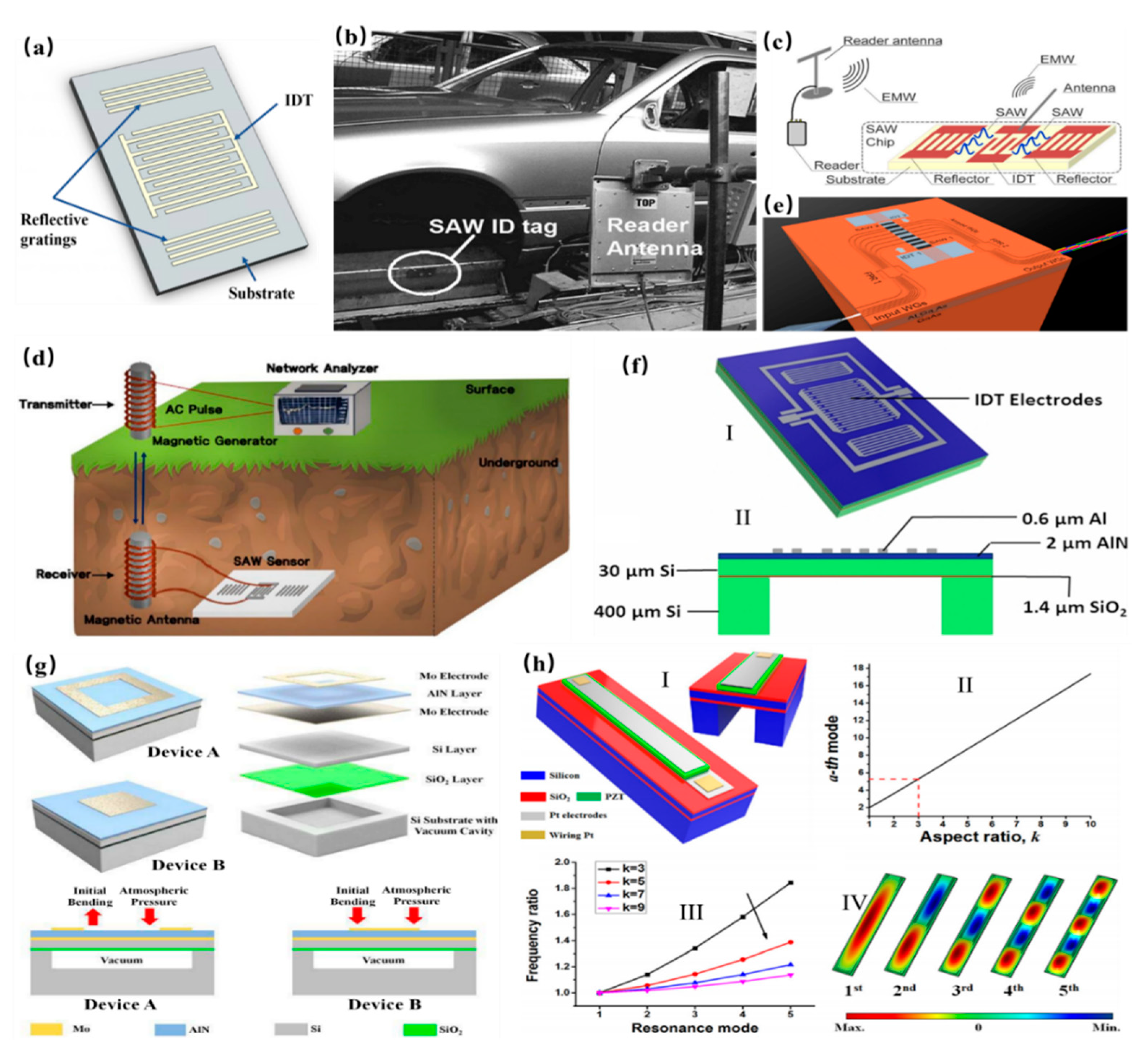
- Donohoe, B.; Geraghty, D.; O’Donnell, G. Wireless calibration of a surface acoustic wave resonator as a strain sensor. IEEE Sens. J. 2010, 11, 1026–1032. [Google Scholar] [CrossRef]
- Hartmann, P. A passive SAW based RFID system for use on ordnance. In Proceedings of the 2009 IEEE International Conference on RFID, Orlando, FL, USA, 27–28 April 2009; pp. 291–297. [Google Scholar]
- Feng, Y.; Xie, L.; Chen, Q.; Zheng, L. Low-cost printed chipless RFID humidity sensor tag for intelligent packaging. IEEE Sens. J. 2015, 15, 3201–3208. [Google Scholar] [CrossRef]
- Plessky, V.; Reindl, L. Review on SAW RFID tags. IEEE T. Ultrason. Ferr. 2010, 57, 654–668. [Google Scholar] [CrossRef] [PubMed]
- Ma, G.; Wu, Z. A wireless and passive online temperature monitoring system for GIS based on surface-acoustic-wave sensor. IEEE T. Power. Deliv. 2016, 31, 1270–1280. [Google Scholar] [CrossRef]
- Kim, S.; Adib, M.; Lee, K. Development of chipless and wireless underground temperature sensor system based on magnetic antennas and SAW sensor. Sens. Actuators A 2019, 297, 111549. [Google Scholar] [CrossRef]
- Crespo-Poveda, A.; Hernández-Mínguez, A. Acoustically driven arrayed waveguide grating. Opt. Express 2015, 23, 21213–21231. [Google Scholar] [CrossRef] [Green Version]
- Tadesse, S.; Li, M. Sub-optical wavelength acoustic wave modulation of integrated photonic resonators at microwave frequencies. Nat. Commun. 2014, 5, 5402. [Google Scholar] [CrossRef]
- Wang, T.; Mu, X.; Kropelnicki, P.; Randles, A.; Lee, C. Viscosity and density decoupling method using a higher order lamb wave sensor. J. Micromech. Microeng. 2014, 24, 075002. [Google Scholar] [CrossRef]
- Wang, T.; Lee, C. Zero-bending piezoelectric micromachined ultrasonic transducer (pMUT) with enhanced transmitting performance. J. Microelectromech. S 2015, 24, 2083–2091. [Google Scholar] [CrossRef]
- Wang, T.; Kobayashi, T.; Lee, C. Micromachined piezoelectric ultrasonic transducer with ultra-wide frequency bandwidth. Appl. Phys. Lett. 2015, 106, 013501. [Google Scholar] [CrossRef]
- Shi, Q.; Wang, T.; Kobayashi, T.; Lee, C. Investigation of geometric design in piezoelectric microelectromechanical systems diaphragms for ultrasonic energy harvesting. Appl. Phys. Lett. 2016, 108, 193902. [Google Scholar] [CrossRef]
- Shi, Q.; Wang, T.; Lee, C. MEMS based broadband piezoelectric ultrasonic energy harvester (PUEH) for enabling self-powered implantable biomedical devices. Sci. Rep. 2016, 6, 24946. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gupta, R.K.; Shi, Q.; Dhakar, L.; Wang, T.; Heng, C.H.; Lee, C. Broadband energy harvester using non-linear polymer spring and electromagnetic/triboelectric hybrid mechanism. Sci. Rep. 2017, 7, 41396. [Google Scholar] [CrossRef] [PubMed]
- Leonov, V. Thermoelectric energy harvester on the heated human machine. J. Micromech. Microeng. 2011, 21, 125013. [Google Scholar] [CrossRef]
- Cuadras, A.; Gasulla, M.; Ferrari, V. Thermal energy harvesting through pyroelectricity. Sens. Actuators A Phys. 2010, 158, 132–139. [Google Scholar] [CrossRef]
- Liu, H.; Quan, C.; Tay, C.J.; Kobayashi, T.; Lee, C. A MEMS-based piezoelectric cantilever patterned with PZT thin film array for harvesting energy from low frequency vibrations. In Physics Procedia; Elsevier B.V.: Amsterdam, The Netherlands, 2011; Volume 19, pp. 129–133. [Google Scholar]
- Nabavi, S.; Zhang, L. Portable wind energy harevsters for low-power applications: A survey. Sensors 2016, 16, 1101. [Google Scholar] [CrossRef] [Green Version]
- Yi, Z.; Yang, B.; Li, G.; Liu, J.; Chen, X.; Wang, X.; Yang, C. High performance bimorph piezoelectric MEMS harvester via bulk PZT thick films on thin beryllium-bronze substrate. Appl. Phys. Lett. 2017, 111, 013902. [Google Scholar] [CrossRef]
- Gu, L.; Livermore, C. Passive self-tuning energy harvester for extracting energy from rotational motion. Appl. Phys. Lett. 2010, 97, 081904. [Google Scholar] [CrossRef]
- Yang, B.; Lee, C. Non-resonant electromagnetic wideband energy harvesting mechanism for low frequency vibrations. Microsyst. Technol. 2010, 16, 961–966. [Google Scholar] [CrossRef]
- Elvin, N.G.; Elvin, A.A. An experimentally validated electromagnetic energy harvester. J. Sound Vib. 2011, 330, 2314–2324. [Google Scholar] [CrossRef]
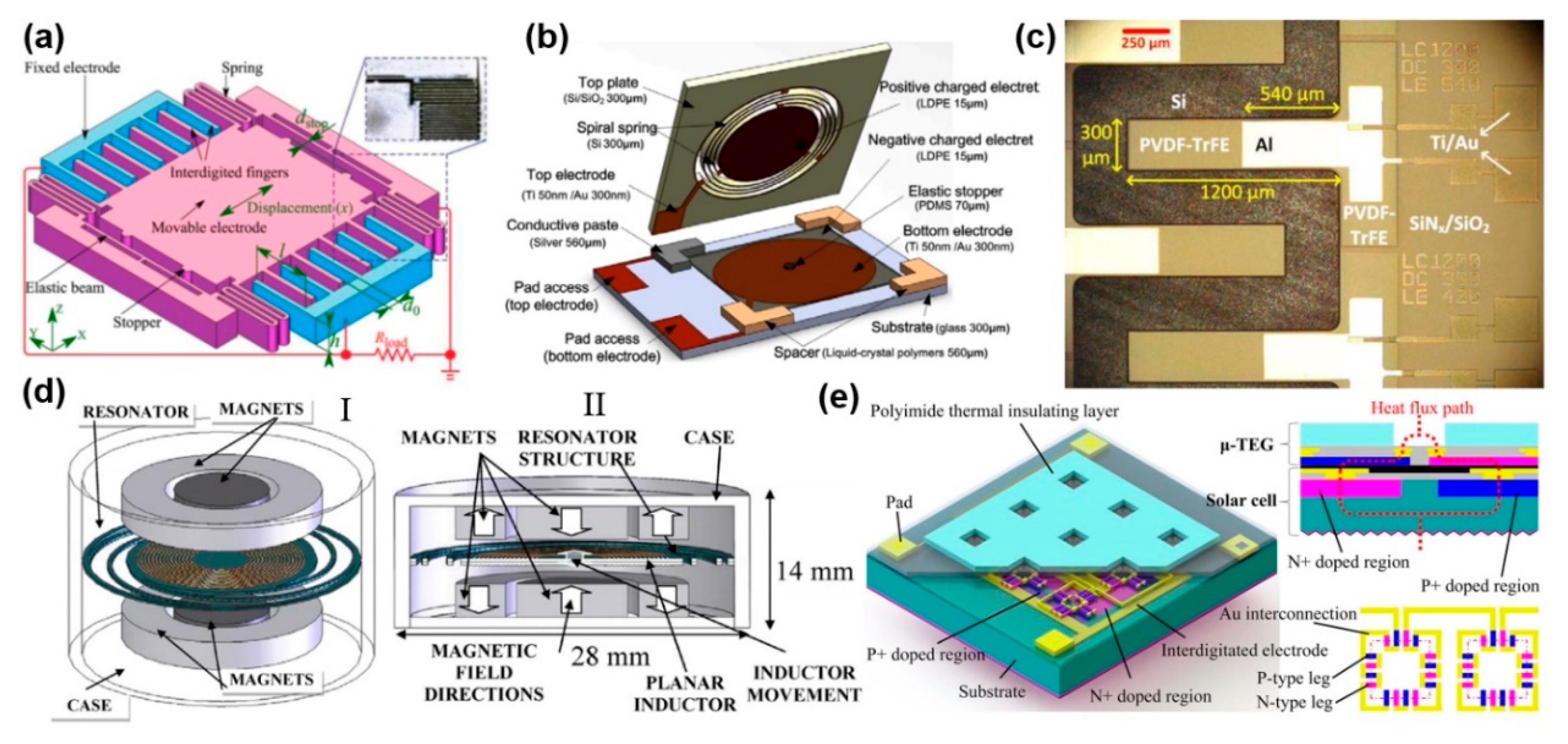
- Zhang, Y.; Wang, T.; Luo, A.; Hu, Y.; Li, X.; Wang, F. Micro electrostatic energy harvester with both broad bandwidth and high normalized power density. Appl. Energy 2018, 212, 362–371. [Google Scholar] [CrossRef]
- Suzuki, Y.; Miki, D.; Edamoto, M.; Honzumi, M. A MEMS electret generator with electrostatic levitation for vibration-driven energy-harvesting applications. J. Micromech. Microeng. 2010, 20, 104002. [Google Scholar] [CrossRef]
- Lu, Y.; Cottone, F.; Boisseau, S.; Marty, F.; Galayko, D.; Basset, P. A nonlinear MEMS electrostatic kinetic energy harvester for human-powered biomedical devices. Appl. Phys. Lett. 2015, 107, 20–24. [Google Scholar] [CrossRef]
- Lu, Y.; O’Riordan, E.; Cottone, F.; Boisseau, S.; Galayko, D.; Blokhina, E.; Marty, F.; Basset, P. A batch-fabricated electret-biased wideband MEMS vibration energy harvester with frequency-up conversion behavior powering a UHF wireless sensor node. J. Micromech. Microeng. 2016, 26, 124004. [Google Scholar] [CrossRef] [Green Version]
- Tao, K.; Lye, S.; Miao, J.; Tang, L.; Hu, X. Out-of-plane electret-based MEMS energy harvester with the combined nonlinear effect from electrostatic force and a mechanical elastic stopper. J. Micromech. Microeng. 2015, 25, 104014. [Google Scholar] [CrossRef]
- Toprak, A.; Tigli, O. MEMS scale PVDF-TrFE-based piezoelectric energy harvesters. J. Microelectromech. Syst. 2015, 24, 1989–1997. [Google Scholar] [CrossRef]
- Sardini, E.; Serpelloni, M. An efficient electromagnetic power harvesting device for low-frequency applications. Sens. Actuators A Phys. 2011, 172, 475–482. [Google Scholar] [CrossRef]
- Yan, J.; Liao, X.; Ji, S.; Zhang, S. MEMS-based thermoelectric-photoelectric integrated power generator. J. Microelectromech. Syst. 2019, 28, 1–3. [Google Scholar] [CrossRef]
- Liu, J.; Fang, H.; Xu, Z.; Mao, X.; Shen, X.; Chen, D.; Liao, H.; Cai, B. A MEMS-based piezoelectric power generator array for vibration energy harvesting. Microelectron. J. 2008, 39, 802–806. [Google Scholar] [CrossRef]
- Liu, H.; Lee, C.; Kobayashi, T.; Tay, C.; Quan, C. Piezoelectric MEMS-based wideband energy harvesting systems using a frequency-up-conversion cantilever stopper. Sens. Actuators A 2012, 186, 242–248. [Google Scholar] [CrossRef]
- Zhu, J.; Wang, A.; Hu, H.; Zhu, H. Hybrid electromagnetic and triboelectric nanogenerators with multi-impact for wideband frequency energy harvesting. Energies 2017, 10, 2024. [Google Scholar] [CrossRef] [Green Version]
- Zhu, J.; Yuksek, N.; Almasri, M.; Feng, Z. Numerical modelling of dynamic response of miniature multi-impact electromagnetic device for low and wide range frequencies energy harvesting. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 233, 2400–2409. [Google Scholar] [CrossRef]
- Liu, H.; Tay, C.; Quan, C.; Kobayashi, T.; Lee, C. Piezoelectric MEMS energy harvester for low-frequency vibrations with wideband operation range and steadily increased output power. J. Microelectromech. Syst. 2011, 20, 1131–1142. [Google Scholar] [CrossRef]
- Liu, H.; Koh, K.; Lee, C. Ultra-wide frequency broadening mechanism for micro-scale electromagnetic energy harvester. Appl. Phys. Lett. 2014, 104, 053901. [Google Scholar] [CrossRef]
- Liu, H.; Soon, B.; Wang, N.; Tay, C.; Quan, C.; Lee, C. Feasibility study of a 3D vibration-driven electromagnetic MEMS energy harvester with multiple vibration modes. J. Micromech. Microeng. 2012, 22, 125020. [Google Scholar] [CrossRef]
- Zhu, J.; Lin, J.; Yuksek, N.; Almasri, M.; Feng, Z. Dynamic phenomena and analysis of MEMS capacitive power harvester subjected to low-frequency excitations. Nonlinear Dyn. 2015, 79, 673–688. [Google Scholar] [CrossRef]
- Zhu, J.; Guo, X.; Huang, R. Asymmetric disappearance and periodic asymmetric phenomena of rocking dynamics in micro dual-capacitive energy harvester. AIP Conf. Proc. 2018, 1971, 040002. [Google Scholar]
- Zhu, J.; Chen, C.; Guo, X. Suspended polytetrafluoroethylene nanostructure electret film in dual variable cavities for self-powered micro-shock sensing. Mater. Res. Express 2018, 5, 046305. [Google Scholar] [CrossRef]
- Liu, H.; Zhang, S.; Kathiresan, R.; Kobayashi, T.; Lee, C. Development of piezoelectric microcantilever flow sensor with wind-driven energy harvesting capability. Appl. Phys. Lett. 2012, 100, 223905. [Google Scholar] [CrossRef] [Green Version]
- Boutry, C.; Beker, L.; Kaizawa, Y.; Vassos, C.; Tran, H.; Hinckley, A.; Pfattner, R.; Niu, S.; Li, J.; Claverie, J.; et al. Biodegradable and flexible arterial-pulse sensor for the wireless monitoring of blood flow. Nat. Biomed. Eng. 2019, 3, 47–57. [Google Scholar] [CrossRef]
- Wang, C.; Li, X.; Hu, H.; Zhang, L.; Huang, Z.; Lin, M.; Zhang, Z.; Yin, Z.; Huang, B.; Gong, H.; et al. Monitoring of the central blood pressure waveform via a conformal ultrasonic device. Nat. Biomed. Eng. 2018, 2, 687–695. [Google Scholar] [CrossRef] [PubMed]
- Tian, X.; Lee, P.; Tan, Y.; Wu, T.; Yao, H.; Zhang, M.; Li, Z.; Ng, K.; Tee, B.; Ho, J. Wireless body sensor networks based on metamaterial textiles. Nat. Electron. 2019, 2, 243–251. [Google Scholar] [CrossRef]
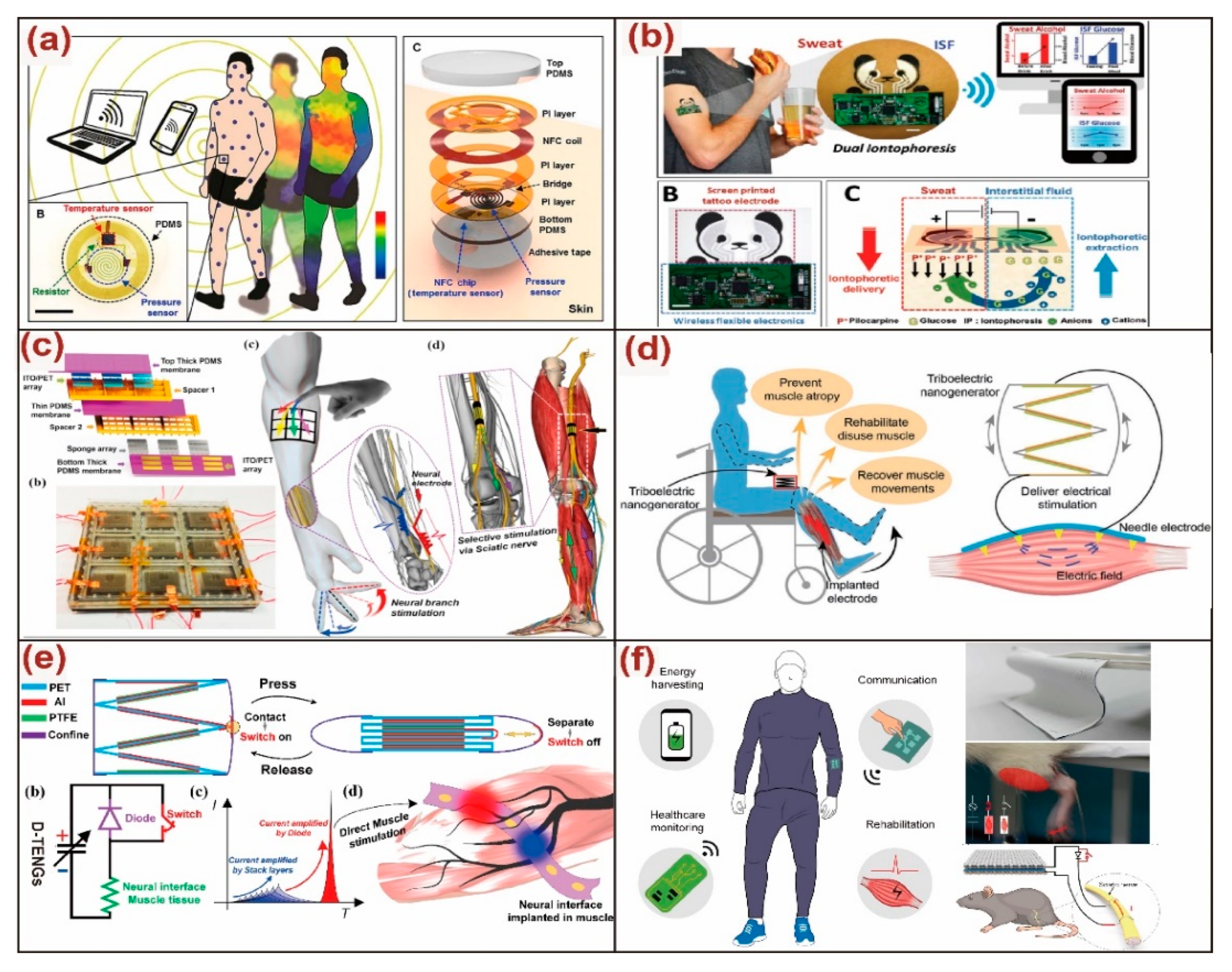
- Han, S.; Kim, J.; Won, S.M.; Ma, Y.; Kang, D.; Xie, Z.; Lee, K.; Chung, H.; Banks, A.; Min, S.; et al. Battery-free, wireless sensors for full-body pressure and temperature mapping. Sci. Transl. Med. 2018, 10, 4950. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, J.; Sempionatto, J.; Imani, S.; Hartel, M.; Barfidokht, A.; Tang, G.; Campbell, A.; Mercier, P.; Wang, J. Simultaneous monitoring of sweat and interstitial fluid using a single wearable biosensor platform. Adv. Sci. 2018, 5, 1800880. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.; Wang, H.; Wang, J.; Shi, Q.; Yen, S.; Thakor, N.; Lee, C. Battery-free neuromodulator for peripheral nerve direct stimulation. Nano Energy 2018, 50, 148–158. [Google Scholar] [CrossRef]
- Wang, J.; Wang, H.; He, T.; He, B.; Thakor, N.; Lee, C. Investigation of low-current direct stimulation for rehabilitation treatment related to muscle function loss using self-powered TENG system. Adv. Sci. 2019, 6, 1900149. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Wang, J.; He, T.; Li, Z.; Lee, C. Direct muscle stimulation using diode-amplified triboelectric nanogenerators (TENGs). Nano Energy 2019, 63, 103844. [Google Scholar] [CrossRef]
- He, T.; Wang, H.; Wang, J.; Tian, X.; Wen, F.; Shi, Q.; Ho, J.; Lee, C. Self-sustainable wearable textile nano-energy nano-system (NENS) for next-generation healthcare applications. Adv.Sci. 2019, 2019, 1901437. [Google Scholar] [CrossRef] [Green Version]
- Li, N.; Yi, Z.; Ma, Y.; Xie, F.; Huang, Y.; Tian, Y.; Dong, X.; Liu, Y.; Shao, X.; Li, Y.; et al. Direct powering a real cardiac pacemaker by natural energy of a heartbeat. Acs Nano 2019, 13, 2822–2830. [Google Scholar] [CrossRef]
- Ouyang, H.; Liu, Z.; Li, N.; Shi, B.; Zou, Y.; Xie, F.; Ma, Y.; Li, Z.; Li, H.; Zheng, Q.; et al. Symbiotic cardiac pacemaker. Nat. Commun. 2019, 10, 1821. [Google Scholar] [CrossRef] [Green Version]
- Ding, W.; Wang, A.; Wu, C.; Guo, H.; Wang, Z.L. Human–machine interfacing enabled by triboelectric nanogenerators and tribotronics. Adv. Mater. Technol. 2019, 4, 1800487. [Google Scholar] [CrossRef] [Green Version]
- Shi, Q.; He, T.; Lee, C. More than energy harvesting–combining triboelectric nanogenerator and flexible electronics technology for enabling novel micro-/nano-systems. Nano Energy 2019, 57, 851–871. [Google Scholar] [CrossRef]
- Wu, C.; Wang, A.; Ding, W.; Guo, H.; Wang, Z.L. Triboelectric nanogenerator: A foundation of the energy for the new era. Adv. Energy Mater. 2019, 9, 1802906. [Google Scholar] [CrossRef]
- Chen, L.; Shi, Q.; Sun, Y.; Nguyen, T.; Lee, C.; Soh, S. Controlling surface charge generated by contact electrification: Strategies and applications. Adv. Mater. 2018, 30, 1802405. [Google Scholar] [CrossRef]
- Lee, S.; Shi, Q.; Lee, C. From flexible electronics technology in the era of IoT and artificial intelligence toward future implanted body sensor networks. Appl. Mater. 2019, 7, 031302. [Google Scholar] [CrossRef] [Green Version]
- Pu, X.; Liu, M.; Chen, X.; Sun, J.; Du, C.; Zhang, Y.; Zhai, J.; Hu, W.; Wang, Z.L. Ultrastretchable, transparent triboelectric nanogenerator as electronic skin for biomechanical energy harvesting and tactile sensing. Sci. Adv. 2017, 3, e1700015. [Google Scholar] [CrossRef]
- Pu, X.; Guo, H.; Chen, J.; Wang, X.; Xi, Y.; Hu, C.; Wang, Z.L. Eye motion triggered self-powered mechnosensational communication system using triboelectric nanogenerator. Sci. Adv. 2017, 3, 1700694. [Google Scholar] [CrossRef] [Green Version]
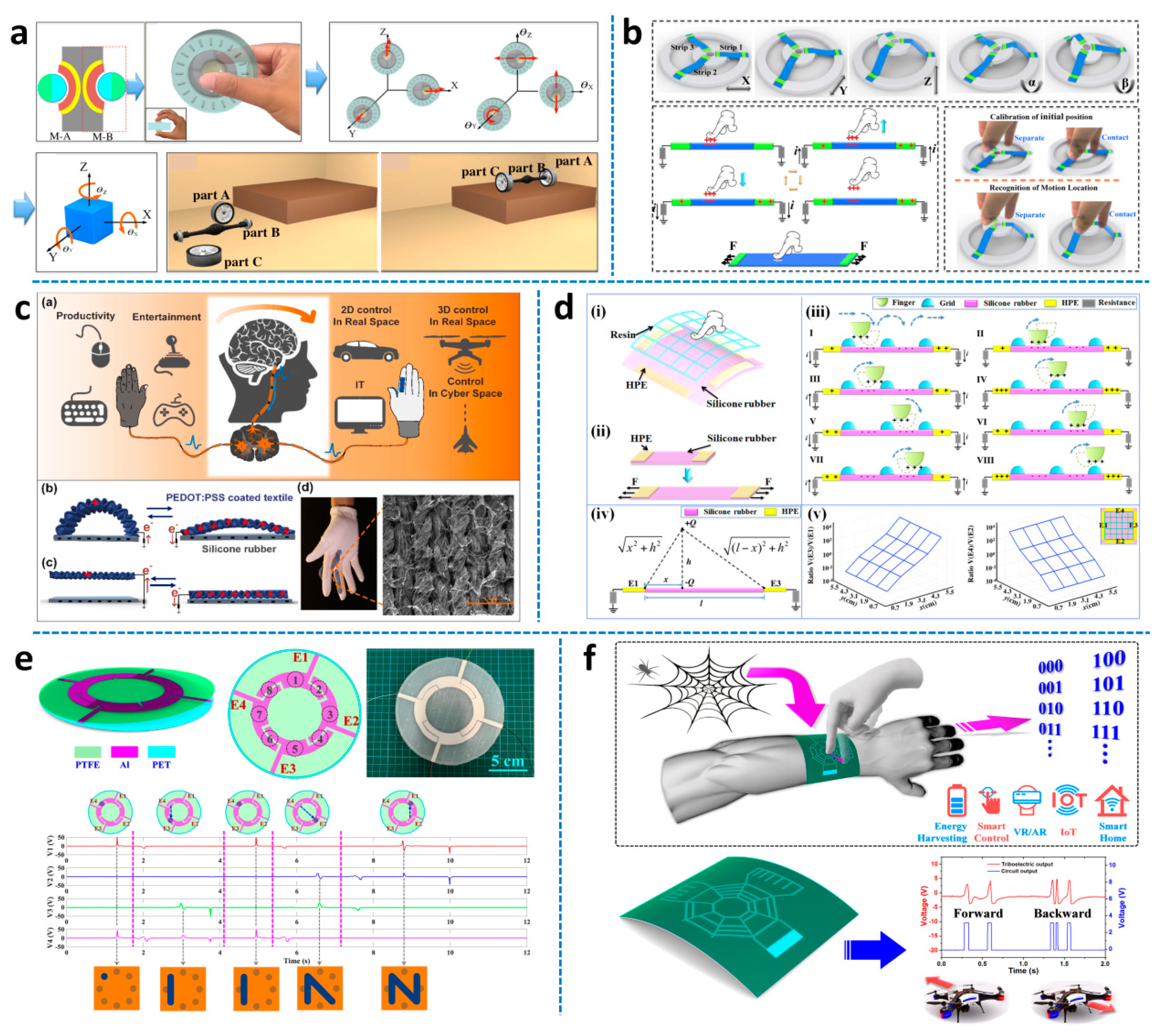
- Shi, Q.; Qiu, C.; He, T.; Wu, F.; Zhu, M.; Dziuban, J.A.; Walczak, R.; Yuce, M.R.; Lee, C. Triboelectric single-electrode-output control interface using patterned grid electrode. Nano Energy 2019, 60, 545–556. [Google Scholar] [CrossRef]
- Zhu, M.; Shi, Q.; He, T.; Yi, Z.; Ma, Y.; Chen, T.; Lee, C. Self-powered and self-functional cotton sock using piezoelectric and triboelectric hybrid mechanism for healthcare and sports monitoring. ACS Nano 2019, 13, 1940–1952. [Google Scholar] [CrossRef]
- He, T.; Shi, Q.; Wang, H.; Wen, F.; Chen, T.; Ouyang, J.; Lee, C. Beyond energy harvesting-multi-functional triboelectric nanosensors on a textile. Nano Energy 2019, 57, 338–352. [Google Scholar] [CrossRef]
- Wu, C.; Ding, W.; Liu, R.; Wang, J.; Wang, A.; Wang, J.; Li, S.; Zi, Y.; Wang, Z.L. Keystroke dynamics enabled authentication and identification using triboelectric nanogenerator array. Mater. Today 2018, 21, 216–222. [Google Scholar] [CrossRef]
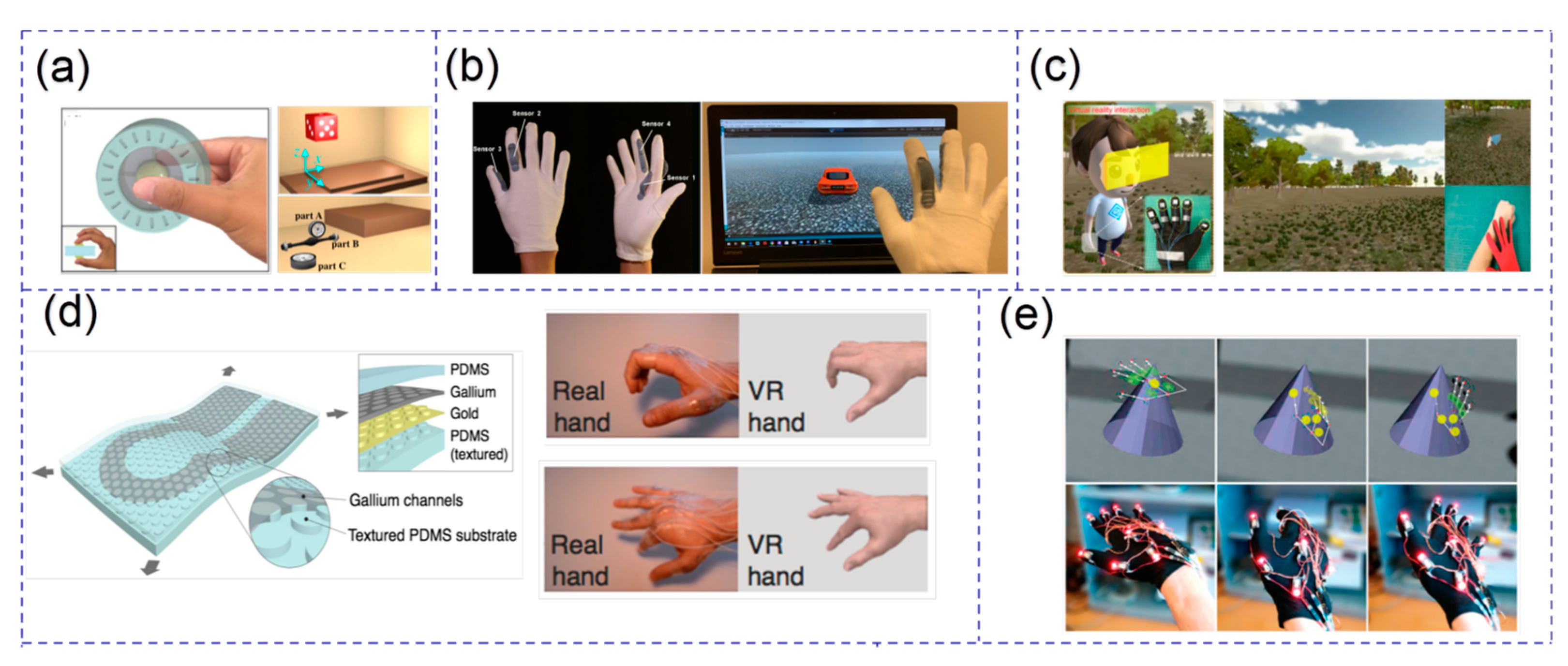
- Chen, T.; Zhao, M.; Shi, Q.; Yang, Z.; Liu, H.; Sum, L.; Ouyang, J.; Lee, C. Novel augmented reality interface using a self-powered triboelectric based virtual reality 3D-control sensor. Nano Energy 2018, 51, 162–172. [Google Scholar] [CrossRef]
- Chen, T.; Shi, Q.; Zhu, M.; He, T.; Yang, Z.; Liu, H.; Sun, L.; Yang, L.; Lee, C. Intuitive-augmented human-machine multidimensional nano-manipulation terminal using triboelectric stretchable strip sensors based on minimalist design. Nano Energy 2019, 60, 440–448. [Google Scholar] [CrossRef]
- He, T.; Sun, Z.; Shi, Q.; Zhu, M.; Anaya, D.V.; Chen, T.; Yuce, M.R.; Thean, A.V.-Y.; Lee, C. Self-powered glove-based intuitive interface for diversified control applications in real/cyber space. Nano Energy 2019, 58, 641–651. [Google Scholar] [CrossRef]
- Chen, T.; Shi, Q.; Zhu, M.; He, T.; Sun, L.; Yang, L.; Lee, C. Triboelectric self-powered wearable flexible patch as 3D motion control interface for robotic manipulator. Acs Nano 2018, 12, 11561–11571. [Google Scholar] [CrossRef]
- Chen, T.; Shi, Q.; Li, K.; Yang, Z.; Liu, H.; Sun, L.; Dziuban, J.A.; Lee, C. Investigation of position sensing and energy harvesting of a flexible triboelectric touch pad. Nanomaterials 2018, 8, 613. [Google Scholar] [CrossRef] [Green Version]
- Shi, Q.; Zhang, Z.; Chen, T.; Lee, C. Minimalist and multi-functional human machine interface (HMI) using a flexible wearable triboelectric patch. Nano Energy 2019, 62, 355–366. [Google Scholar] [CrossRef]
- Shi, Q.; Lee, C. Self-powered bio-Inspired spider-net-coding interface using single-electrode triboelectric nanogenerator. Adv. Sci. 2019, 6, 1900617. [Google Scholar] [CrossRef] [Green Version]
- Lou, S.; Srivastava, G.; Liu, S. A node density control learning method for the internet of things. Sensors 2019, 19, 3428. [Google Scholar] [CrossRef] [Green Version]
- Nevlydov, I.; Filipenko, O.; Volkova, M.; Ponomaryova, G. MEMS-based inertial sensor signals and machine learning methods for classifying robot motion. In Proceedings of the IEEE Second International Conference on Data Stream Mining & Processing, Lviv, Ukraine, 21–25 August 2018; pp. 13–16. [Google Scholar]
- Fontanella, R.; Accardo, D.; Moriello, R.; Angrisani, L.; Simone, D. MEMS gyros temperature calibration through artificial neural networks. Sens. Actuators A 2018, 279, 553–565. [Google Scholar] [CrossRef]
- Nabavi, S.; Zhang, L. Design and optimization of a low-resonant frequency piezoelectric MEMS energy harvester based on artificial intelligence. Proceedings 2018, 2, 930. [Google Scholar] [CrossRef] [Green Version]
- Esposito, E.; Vito, S.; Salvato, M.; Bright, V.; Jones, R.; Popoola, O. Dynamic neural network architectures for on field stochastic calibration of indicative low cost air quality sensing systems. Sens. Actuators. 2016, 231, 701–713. [Google Scholar] [CrossRef] [Green Version]
- Han, J.; Bae, K.; Hong, S.; Park, H.; Kwak, J.; Wang, H.; Joe, D.; Park, J.; Jung, Y.; Hur, S.; et al. Machine learning-based self-powered acoustic sensor for speaker recognition. Nano Energy 2018, 53, 658–665. [Google Scholar] [CrossRef]
- Suh, J.; Cho, I.; Kang, K.; Kweon, S.; Lee, M.; Yoo, H.; Park, I. Fully integrated and portable semiconductor-type multi-gas sensing module for IoT applications. Sens. Actuators B 2018, 265, 660–667. [Google Scholar] [CrossRef]
- Jung, Y.; Hong, S.; Wang, H.; Han, J.; Pham, T.; Park, H.; Kim, J.; Kang, S.; Yoo, C.; Lee, K. Flexible piezoelectric acoustic sensors and machine learning for speech processing. Adv. Mater. 2019, 2019, 1904020. [Google Scholar] [CrossRef]
- Michael, B.; Howard, M. Activity recognition with wearable sensors on loose clothing. PLoS ONE 2017, 12, e0184642. [Google Scholar] [CrossRef] [Green Version]
- Fernandez-carames, T.; Fraga-Lamas, P. Towards the internet-of-smart-clothing: A review on IoT wearables and garments for creating intelligent connected e-textiles. Electronics 2018, 7, 405. [Google Scholar] [CrossRef] [Green Version]
- Moloney, J.; Spehar, B.; Globa, A.; Wang, R. The affordance of virtual reality to enable the sensory representation of multi-dimensional data for immersive analytics: From experience to insight. J. Big Data 2018, 5, 53. [Google Scholar] [CrossRef]
- Liao, X.; Song, W.; Zhang, X.; Zhan, H.; Liu, Y.; Wang, Y.; Zheng, Y. Hetero-contact microstructure to program discerning tactile interactions for virtual reality. Nano Energy 2019, 60, 127–136. [Google Scholar] [CrossRef]
- Dejace, L.; Laubeuf, N.; Furfaro, I.; Lacour, S. Gallium-based thin films for wearable human Motion sensors. Adv. Intell. Syst. 2019, 1, 1900079. [Google Scholar] [CrossRef] [Green Version]
- Martinez, J.; Garcia, A.; Oliver, M.; Molina, J.; Gonzalez, P. Identifying virtual 3D geometric shapes with a vibrotactile glove. IEEE Comput. Grap. Appl. 2016, 36, 42–51. [Google Scholar] [CrossRef] [PubMed]
- Lin, P.; Smith, S. A tactile feedback glove for reproducing realistic surface roughness and continual lateral stroking perception. In Haptic Sensing and Touch Enabled Computer Applications; Prattichizzo, D., Shinoda, H., Tan, H., Ruffaldi, E., Frisoli, A., Eds.; Springer: Cham, Switzerland, 2018; Volume 10894, pp. 169–179. [Google Scholar]
- Tsai, Y.; Jhu, W.; Chen, C.; Kao, C.; Chen, C. Unity game engine: Interactive software design using digital glove for virtual reality baseball pitch training. Microsyst. Technol. 2019, 9, 1–17. [Google Scholar] [CrossRef]
- Dhakar, L.; Gudla, S.; Shan, X.; Wang, Z.; Tay, F.E.H.; Heng, C.-H.; Lee, C. Large scale triboelectric nanogenerator and self-powered pressure sensor array using low cost roll-to-roll UV embossing. Sci. Rep. 2016, 6, 22253. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gong, S.-C.; Lee, C. Analytical solutions of sensitivity for pressure microsensors. IEEE Sens. J. 2001, 1, 340–344. [Google Scholar] [CrossRef]
- Lee, C.; Itoh, T.; Sasaki, G.; Suga, T. Sol-Gel derived PZT force sensor for scanning force microscopy. Mater. Chem. Phys. 1996, 44, 25–29. [Google Scholar] [CrossRef]
- Khan, A.; Mahmud, A.; Ban, D. A contemporary review on multimode energy harvesting for self-powered electronics. IEEE Trans. Nanotechnol. 2019, 18, 21–36. [Google Scholar] [CrossRef]
- Chellasivalingam, M.; Pandit, M.; Kalberer, M.; Seshia, A. Ultra-fine particulate detection using mode-localized MEMS resonators. In Proceedings of the 2019 Joint Conference of the IEEE International Frequency Control Symposium and European Frequency and Time Forum, Orlando, FL, USA, 14–18 April 2019. [Google Scholar]
- Bertke, M.; Xu, J.; Setiono, A.; Kirsch, I.; Uhde, E.; Peiner, E. Fabrication of a microcantilever-based aerosol detector with integrated electrostatic on-chip ultrafine particle separation and collection. J. Micromech. Microeng. 2019, 30, 014001. [Google Scholar] [CrossRef]
- Meng, F.; Qin, W.; Li, B.; Zhang, H.; Wang, S.; Chang, Y.; Li, M.; Yuan, Z. Synthesis of Au nanoparticle-modified spindle shaped α-Fe2O3 nanorods and their gas sensing properties to N-butanol. IEEE Trans. Nanotechnol. 2019, 18, 911–920. [Google Scholar] [CrossRef]
- Beniwai, A.; Kumar, S.; Sunny. Baseline drift improvement through investigating a novel Ag doped SnO2/ZnO nanocomposite for selective ethanol detection. IEEE Trans. Nanotechnol. 2019, 18, 412–420. [Google Scholar] [CrossRef]
- Cai, S.; Li, W.; Xu, P.; Xia, X.; Yu, H.; Zhang, S.; Li, X. In situ construction of metal-organic framework(MOF) uio-66 film on parylene-patterned resonant microcantilever for trace organophosphorus molecules detection. Analyst 2019, 144, 3729–3735. [Google Scholar] [CrossRef]
- Xu, J.; Setiono, A.; Bertke, M.; Strempel, K.; Markiewicz, N.; Schmidt, A.; Waag, A.; Prades, J.; Peiner, E. Piezoresistive microcantilevers 3D-patterned using zno-nanorodes@silicon-nanopillars for room-temperature ethanol detection. In Proceedings of the 2019 20th International Conference on Solid-State Sensors, Actuators and Microsystems & Eurosensors XXXIII, Berlin, Germany, 23–27 June 2019. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MEMS Acoustic Sensor Type | Advantages | Disadvantages |
|---|---|---|
| Capacitive | High sensitivity High signal-to-noise ratio Low noise level | Sensitive to environment disturbances (moisture/dust/shock) Bias voltage required |
| Electret | High sensitivity Low power consumption | Sensitive to environment disturbances High charges required |
| Electromagnetic | Wide dynamic range Low noise level | Huge volume Low sensitivity |
| Piezoelectric | High acoustic overload Low power consumption High reliability | High noise level Low sensitivity |
| Optical | High sensitivity Wide dynamic range Immune to electromagnetic interference | External light source Fabrication and packaging difficulties |
| Gas Sensor Type | Principle | Fabrication Method | Response Time | Target Gas | Working Temperature | Operation Concentration | Reference |
|---|---|---|---|---|---|---|---|
| SnO2 nanowire | Metal oxide | Local deposition | 150 s | H2S | 200 °C | 20 ppm | [78] |
| Pd-Si naomesh | Particles | Nanosphere lithography | 12 s | H2S NO2 CO | RT | 50 ppm | [82] |
| Pd, SiNM | Diode | Lithography | 22 s | H2 | RT | 0.5% | [84] |
| Metamaterial absorber | Mid-IR | Lithography | 5 s | CO2 | RT | 40 ppm | [85] |
| ZIF-8 | MOF | Solution-based | ~300 s | CO H2 NO2 | RT | 10 ppm | [87] |
| Graphene | Band-gap | Laser | ~120 s | H2 | RT | 600 ppm | [89] |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, J.; Liu, X.; Shi, Q.; He, T.; Sun, Z.; Guo, X.; Liu, W.; Sulaiman, O.B.; Dong, B.; Lee, C. Development Trends and Perspectives of Future Sensors and MEMS/NEMS. Micromachines 2020, 11, 7. https://doi.org/10.3390/mi11010007
Zhu J, Liu X, Shi Q, He T, Sun Z, Guo X, Liu W, Sulaiman OB, Dong B, Lee C. Development Trends and Perspectives of Future Sensors and MEMS/NEMS. Micromachines. 2020; 11(1):7. https://doi.org/10.3390/mi11010007
Chicago/Turabian StyleZhu, Jianxiong, Xinmiao Liu, Qiongfeng Shi, Tianyiyi He, Zhongda Sun, Xinge Guo, Weixin Liu, Othman Bin Sulaiman, Bowei Dong, and Chengkuo Lee. 2020. "Development Trends and Perspectives of Future Sensors and MEMS/NEMS" Micromachines 11, no. 1: 7. https://doi.org/10.3390/mi11010007