
Fast Factorized Backprojection Algorithm in Orthogonal Elliptical Coordinate System for Ocean Scenes Imaging Using Geosynchronous Spaceborne–Airborne VHF UWB Bistatic SAR
Abstract
:1. Introduction
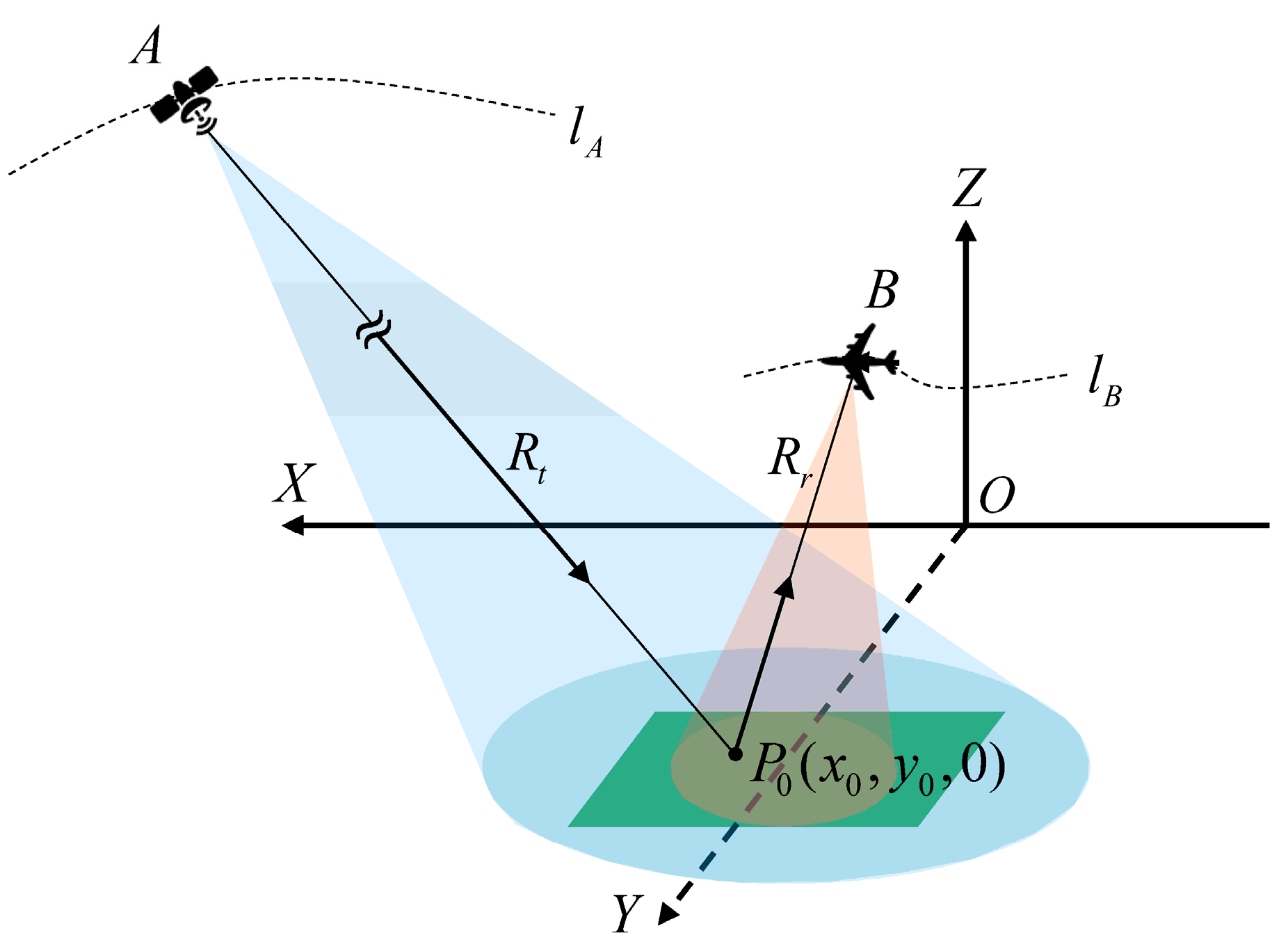
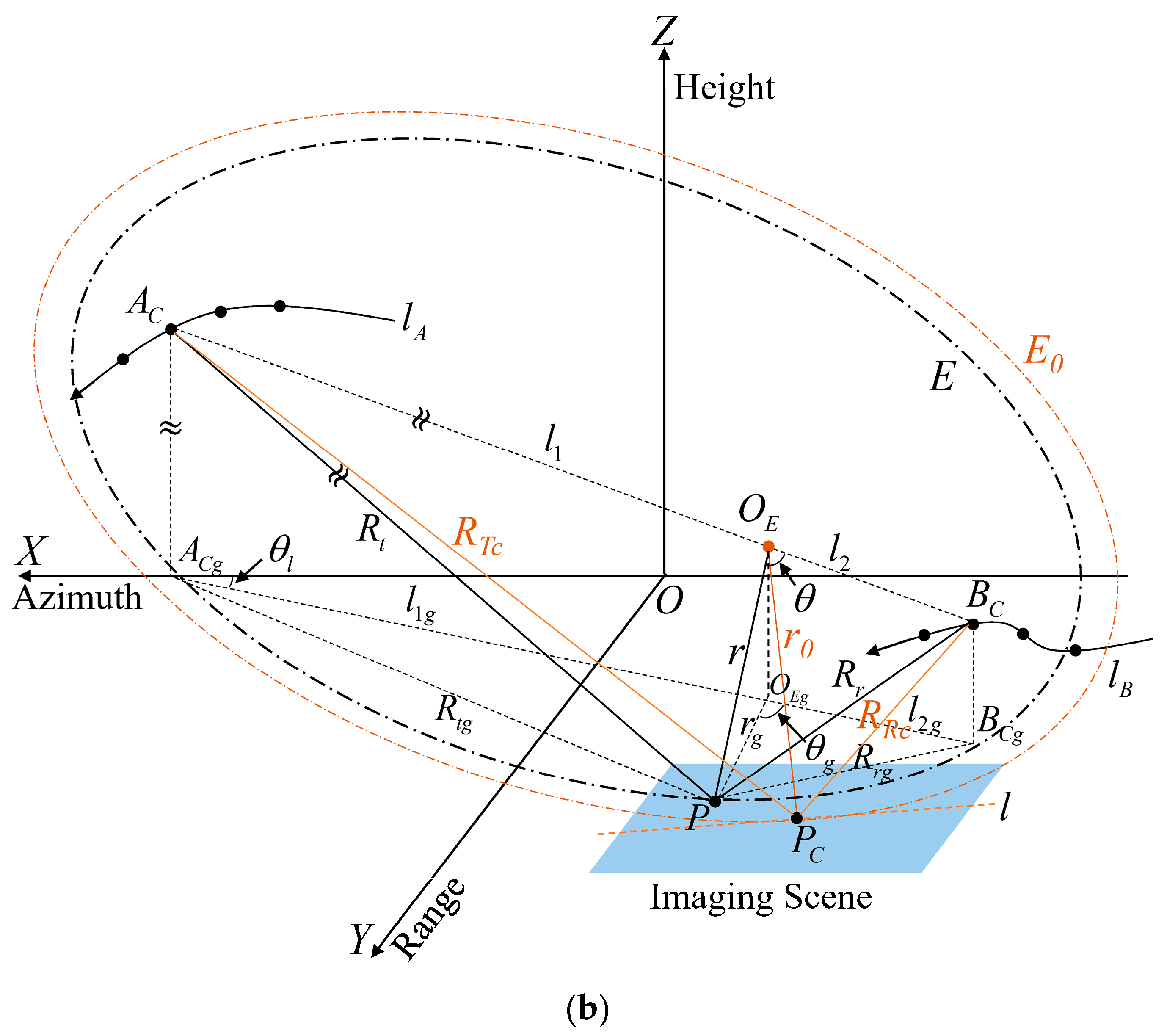
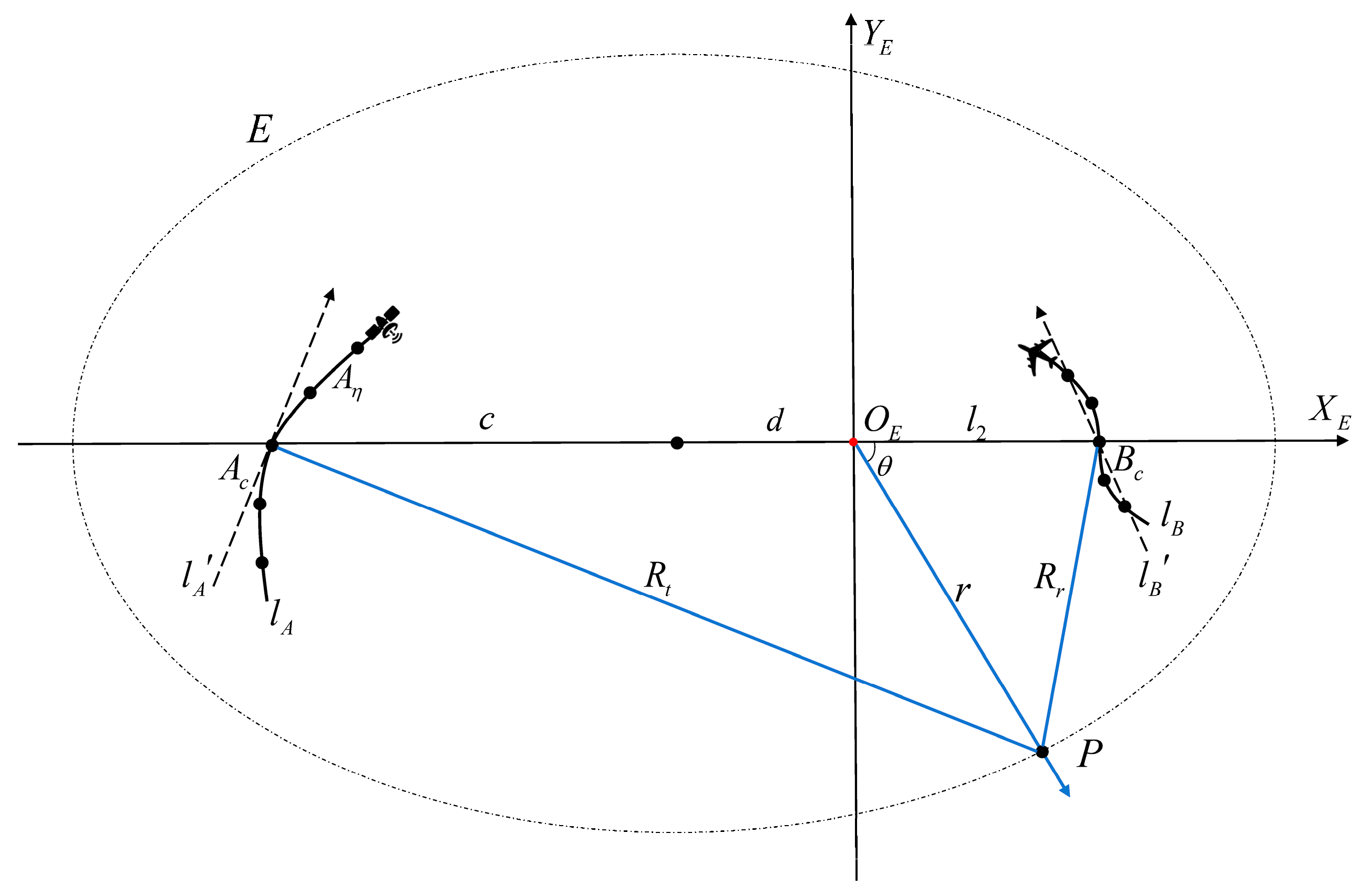
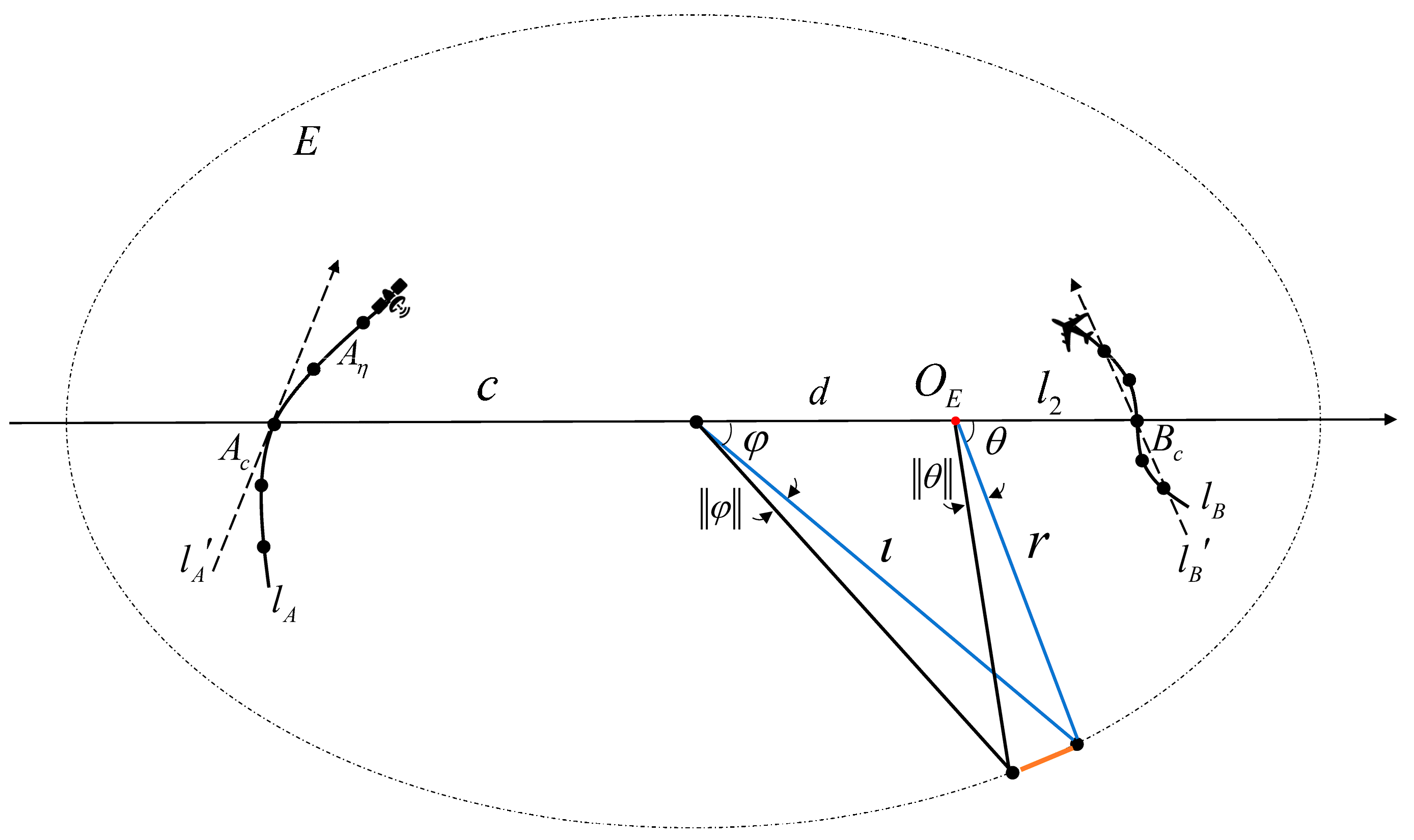
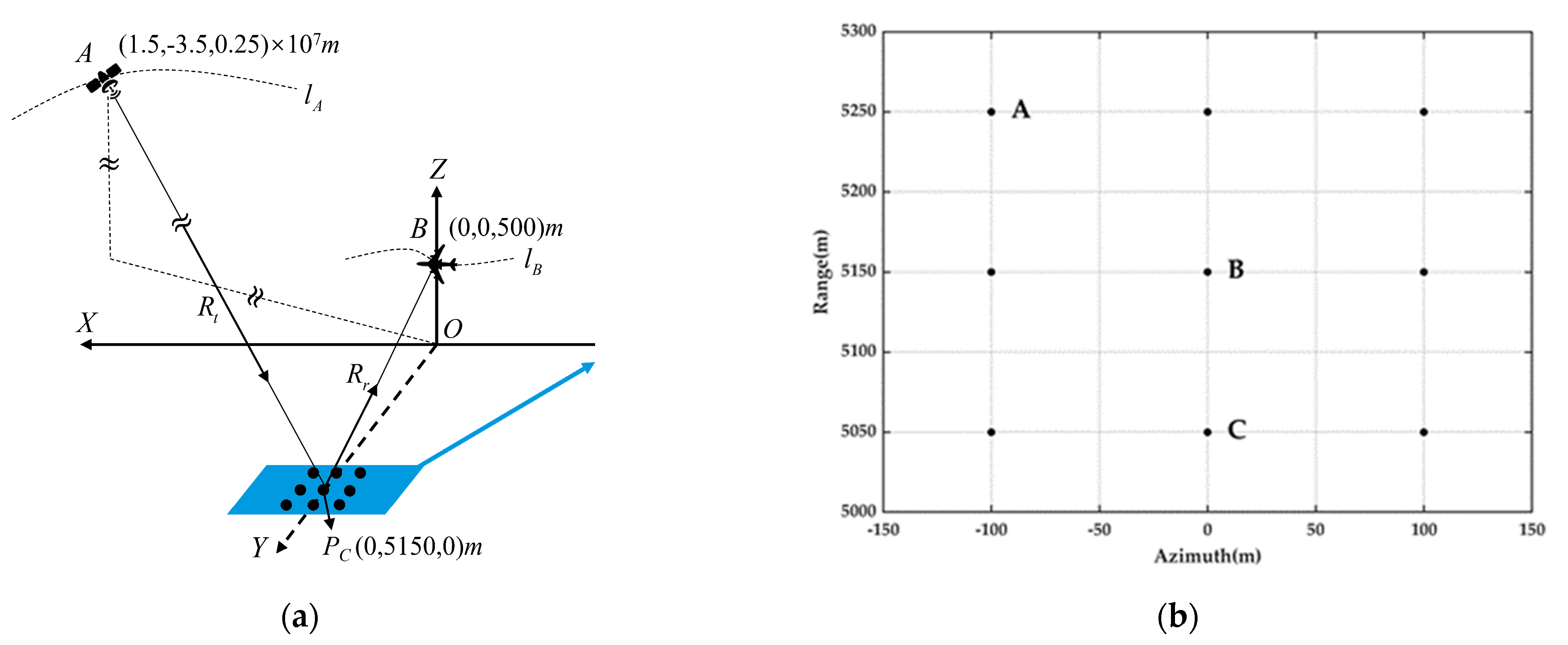
2. Imaging Geometry and Signal Model
3. Bistatic FFBP Algorithm in OEP Coordinate System
3.1. Subaperture Imaging
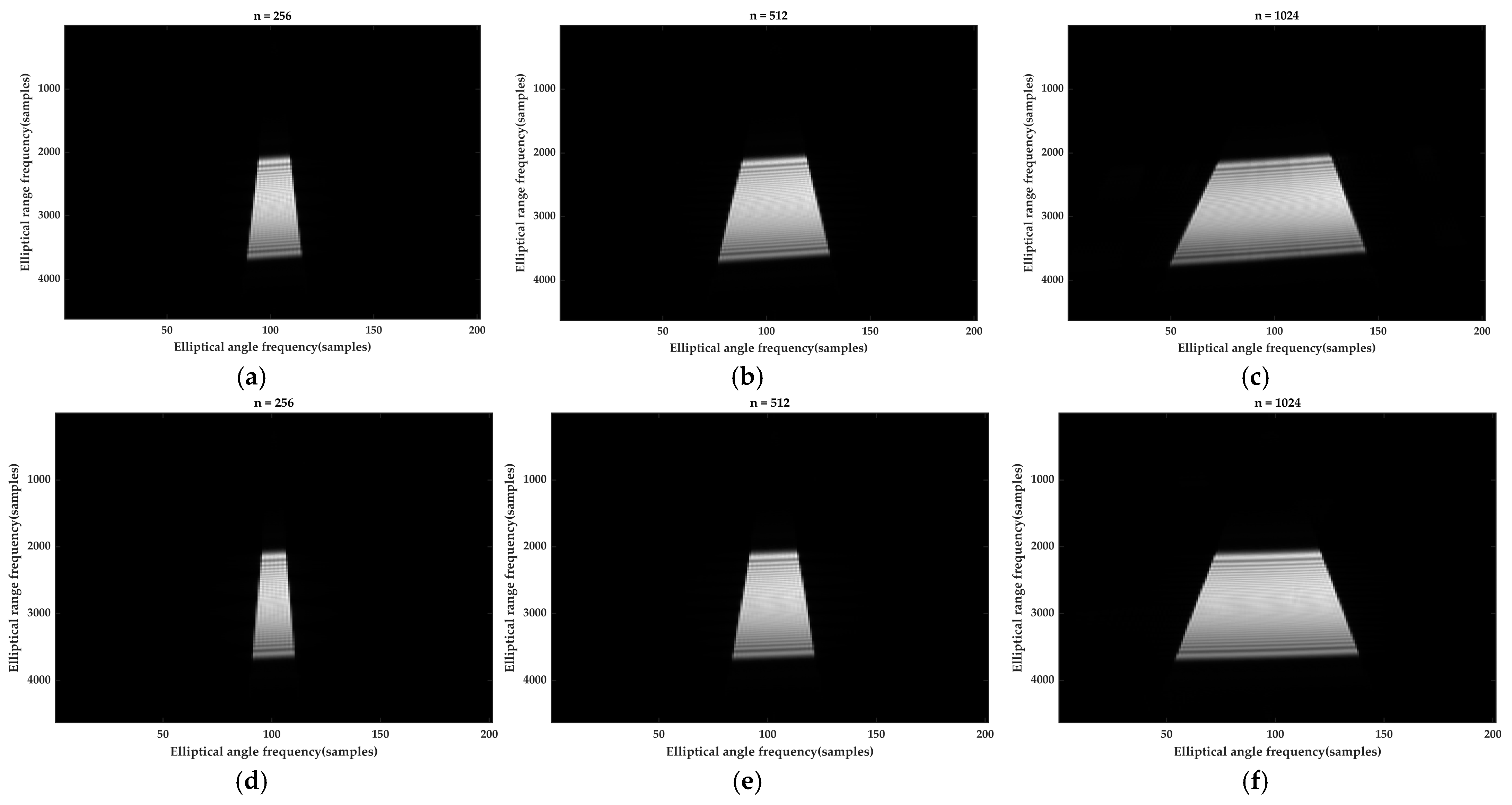
3.2. Sample Requirements
3.3. Superiority of Subimages in OEP Coordinate System
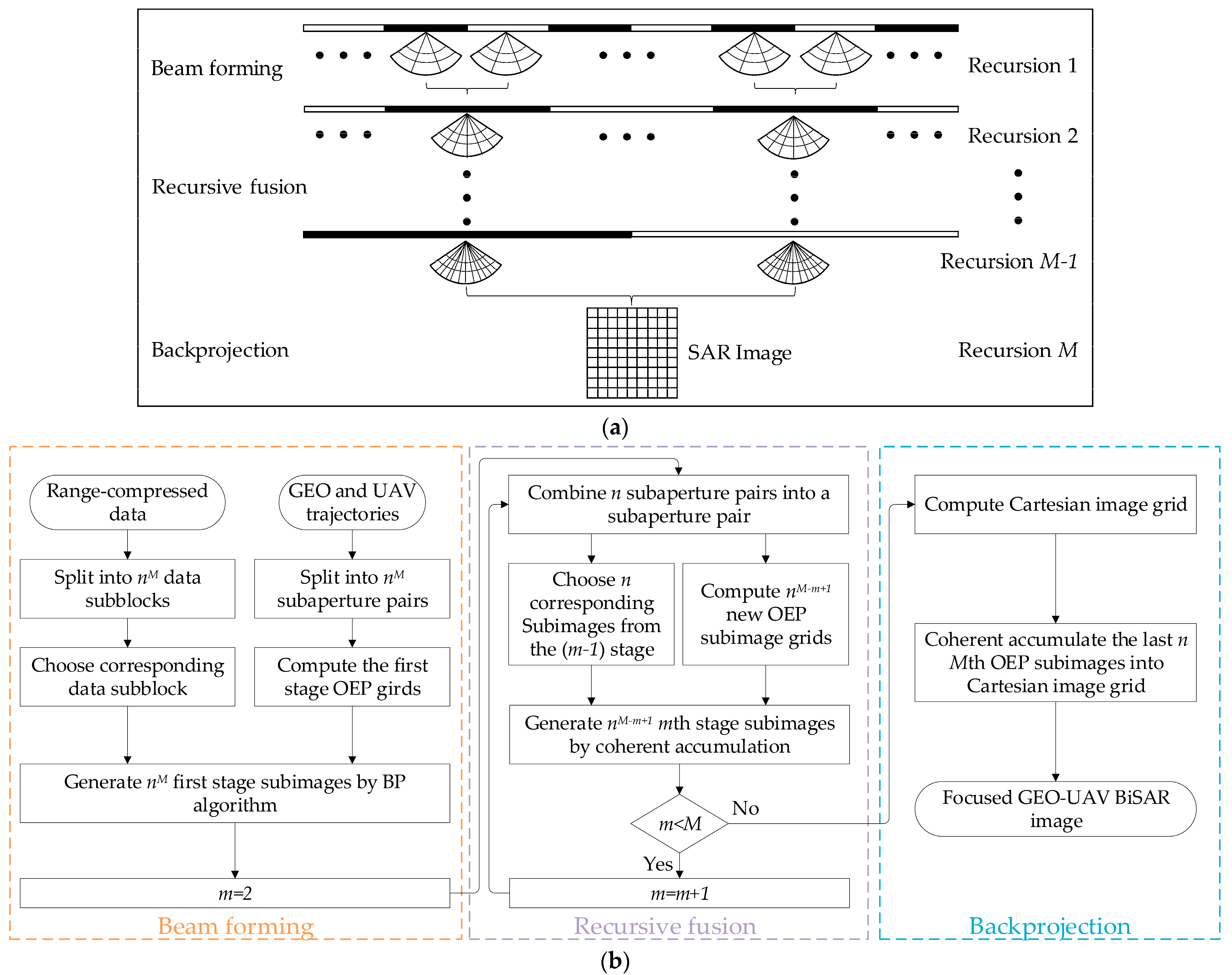
3.4. Implementation Process
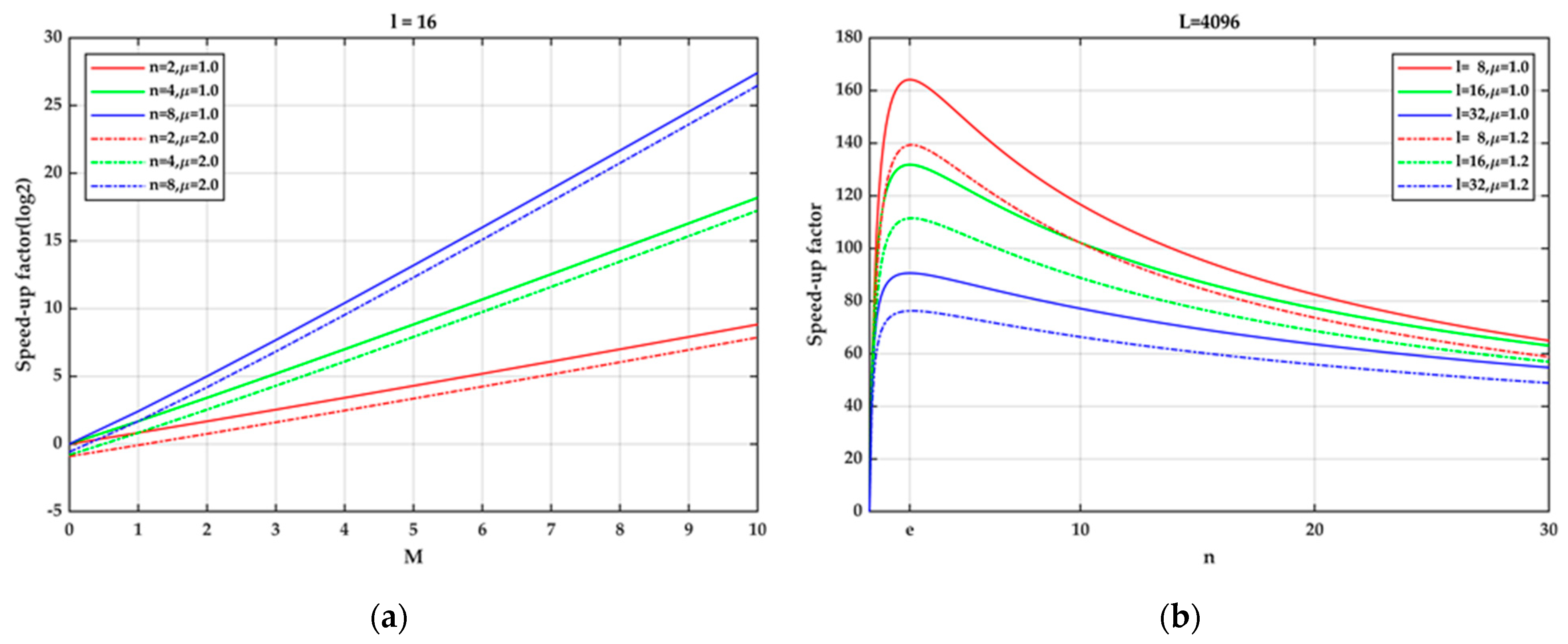
3.5. Computational Burden
4. Experimental Results and Performance Analysis
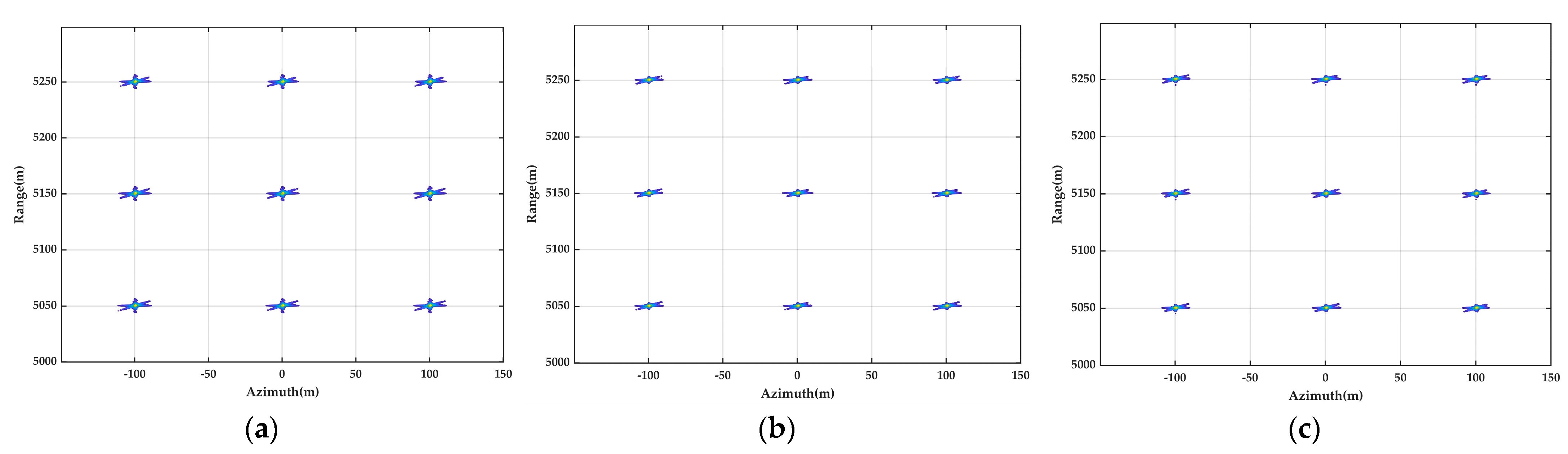
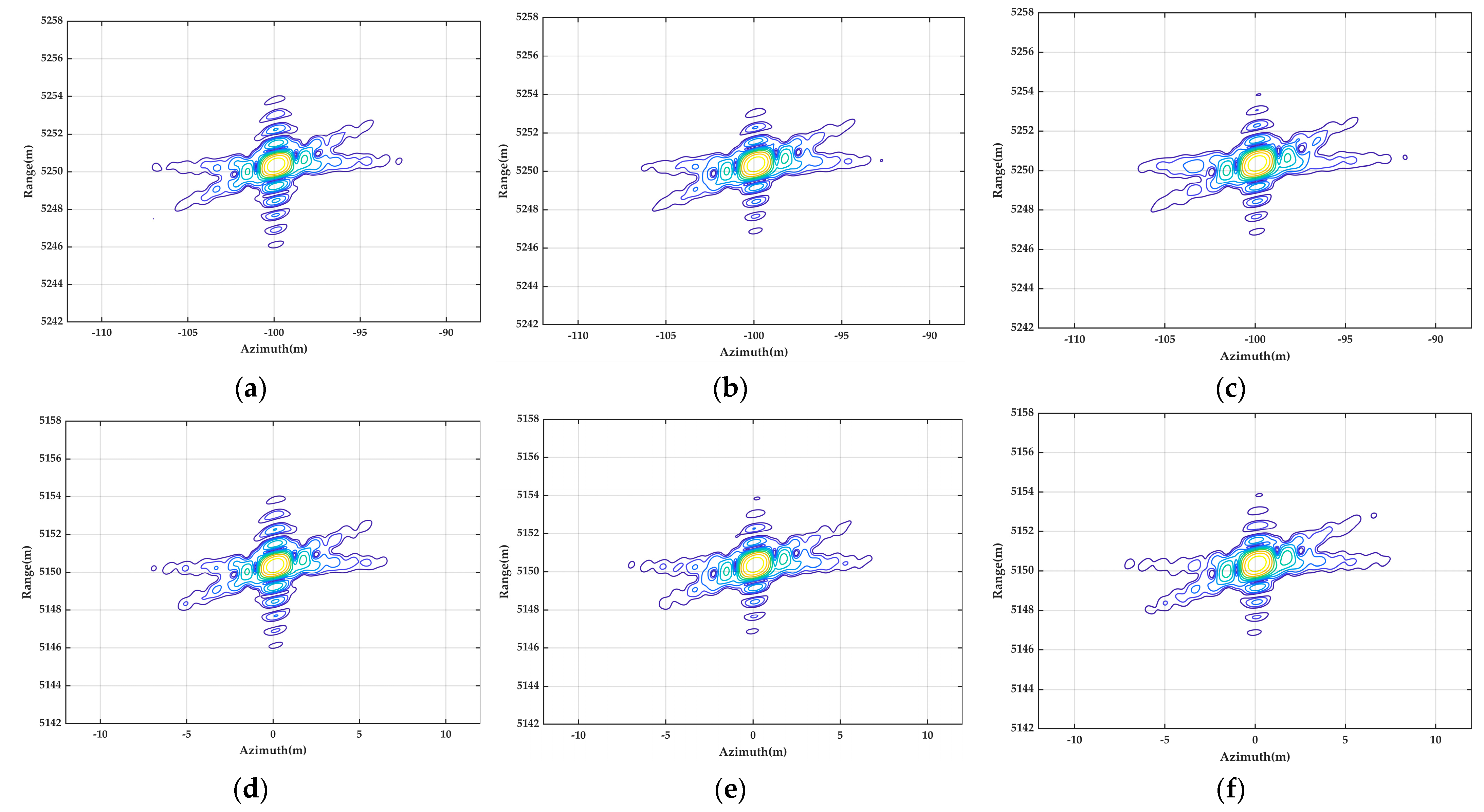
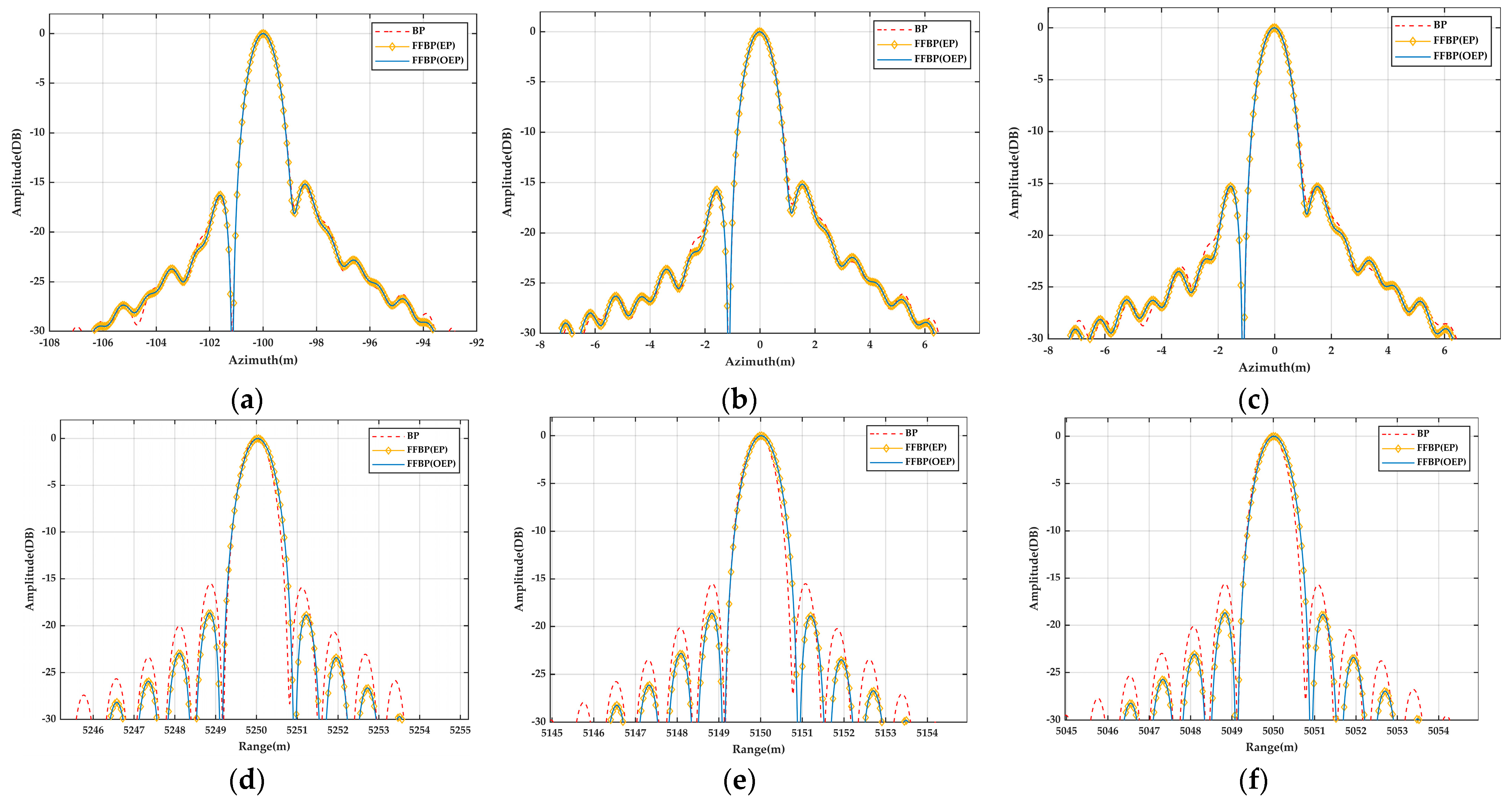
4.1. Experimental Results of Point Targets
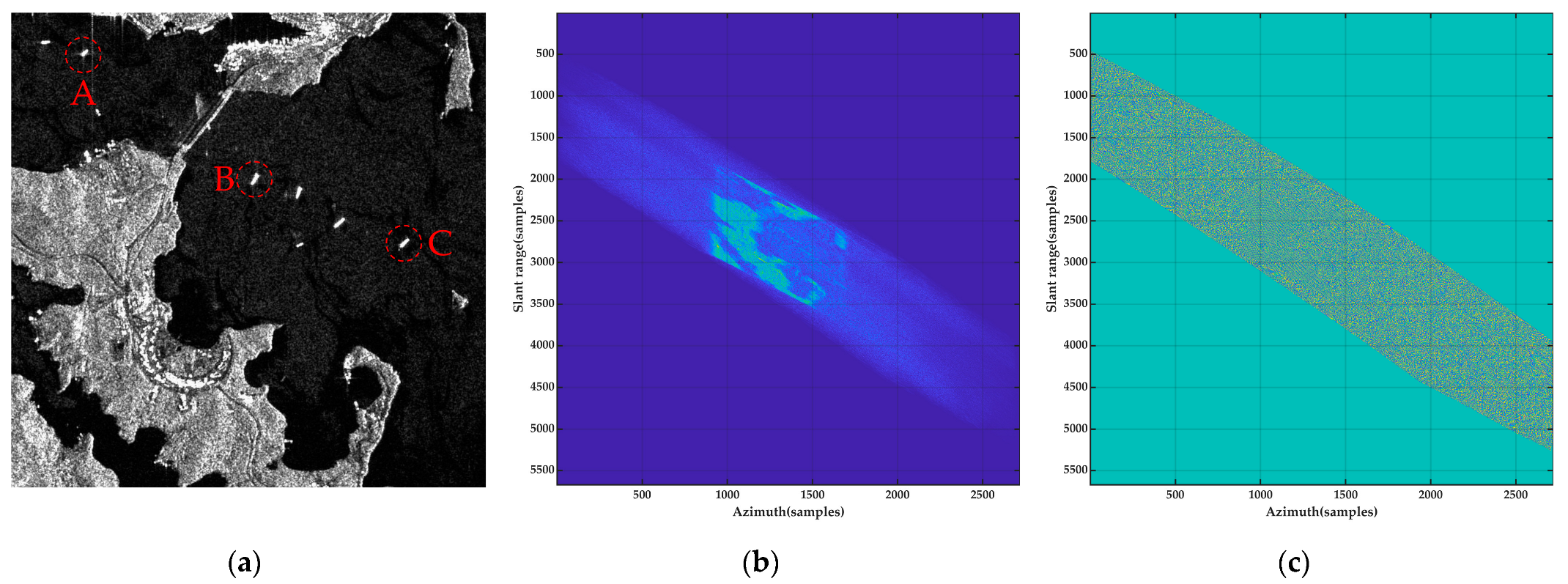
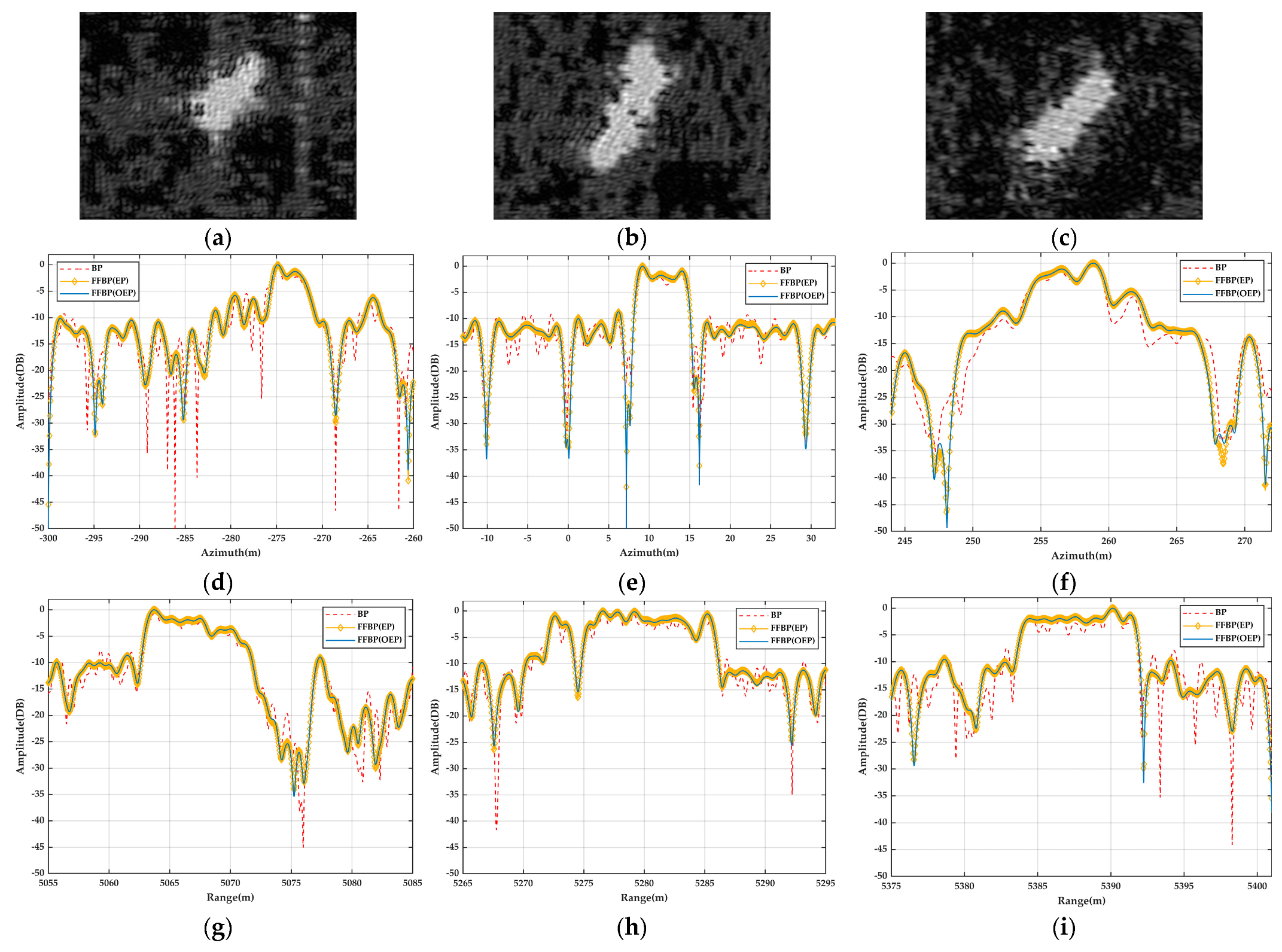
4.2. Experimental Results of Natural Scene
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dai, Z.; Li, H.; Liu, D.; Wang, C.; Shi, L.; He, Y. SAR Observation of Waves under Ice in the Marginal Ice Zone. J. Mar. Sci. Eng. 2022, 10, 1836. [Google Scholar] [CrossRef]
- Ni, W.; Stoffelen, A.; Ren, K. Tropical Cyclone Wind Direction Retrieval from Dual-Polarized SAR Imagery Using Histogram of Oriented Gradients and Hann Window Function. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 16, 878–888. [Google Scholar] [CrossRef]
- Sun, Z.; Meng, C.; Cheng, J.; Zhang, Z.; Chang, S. A Multi-Scale Feature Pyramid Network for Detection and Instance Segmentation of Marine Ships in SAR Images. Remote Sens. 2022, 14, 6312. [Google Scholar] [CrossRef]
- Xie, H.; Jiang, X.; Hu, X.; Wu, Z.; Wang, G.; Xie, K. High-Efficiency and Low-Energy Ship Recognition Strategy Based on Spiking Neural Network in SAR Images. Front. Neurorobot. 2022, 16, 970832. [Google Scholar] [CrossRef]
- Jiang, X.; Xie, H.; Chen, J.; Zhang, J.; Wang, G.; Xie, K. Arbitrary-Oriented Ship Detection Method Based on Long-Edge Decomposition Rotated Bounding Box Encoding in SAR Images. Remote Sens. 2023, 15, 673. [Google Scholar] [CrossRef]
- Xie, H.; Hu, J.; Duan, K.; Wang, G. High-Efficiency and High-Precision Reconstruction Strategy for P-Band Ultra-Wideband Bistatic Synthetic Aperture Radar Raw Data Including Motion Errors. IEEE Access 2020, 8, 31143–31158. [Google Scholar] [CrossRef]
- Ulander, L.M.H.; Barmettler, A.; Flood, B.; Frölind, P.-O.; Gustavsson, A.; Jonsson, T.; Meier, E.; Rasmusson, J.; Stenström, G. Signal-to-Clutter Ratio Enhancement in Bistatic Very High Frequency (VHF)-Band SAR Images of Truck Vehicles in Forested and Urban Terrain. IET Radar Sonar Navig. 2010, 4, 438. [Google Scholar] [CrossRef]
- An, D.; Chen, L.; Huang, X.; Zhou, Z.; Feng, D.; Jin, T. Bistatic P Band UWB SAR Experiment and Raw Data Processing. In Proceedings of the 2016 CIE International Conference on Radar (RADAR), Guangzhou, China, 10–13 October 2016; pp. 1–4. [Google Scholar]
- Xie, H.; An, D.; Huang, X.; Zhou, Z. Efficient Raw Signal Generation Based on Equivalent Scatterer and Subaperture Processing for One-Stationary Bistatic SAR Including Motion Errors. IEEE Trans. Geosci. Remote Sens. 2016, 54, 3360–3377. [Google Scholar] [CrossRef]
- Cui, C.; Dong, X.; Chen, Z.; Hu, C.; Tian, W. A Long-Time Coherent Integration STAP for GEO Spaceborne-Airborne Bistatic SAR. Remote Sens. 2022, 14, 593. [Google Scholar] [CrossRef]
- Dong, X.; Cui, C.; Li, Y.; Hu, C. Geosynchronous Spaceborne-Airborne Bistatic Moving Target Indication System: Performance Analysis and Configuration Design. Remote Sens. 2020, 12, 1810. [Google Scholar] [CrossRef]
- Xu, W.; Wei, Z.; Huang, P.; Tan, W.; Liu, B.; Gao, Z.; Dong, Y. Azimuth Multichannel Reconstruction for Moving Targets in Geosynchronous Spaceborne–Airborne Bistatic SAR. Remote Sens. 2020, 12, 1703. [Google Scholar] [CrossRef]
- Sun, Z.; Wu, J.; Pei, J.; Li, Z.; Huang, Y.; Yang, J. Inclined Geosynchronous Spaceborne–Airborne Bistatic SAR: Performance Analysis and Mission Design. IEEE Trans. Geosci. Remote Sens. 2016, 54, 343–357. [Google Scholar] [CrossRef]
- An, H.; Wu, J.; He, Z.; Li, Z.; Yang, J. Geosynchronous Spaceborne–Airborne Multichannel Bistatic SAR Imaging Using Weighted Fast Factorized Backprojection Method. IEEE Geosci. Remote Sens. Lett. 2019, 16, 1590–1594. [Google Scholar] [CrossRef]
- Wu, J.; Sun, Z.; An, H.; Qu, J.; Yang, J. Azimuth Signal Multichannel Reconstruction and Channel Configuration Design for Geosynchronous Spaceborne–Airborne Bistatic SAR. IEEE Trans. Geosci. Remote Sens. 2019, 57, 1861–1872. [Google Scholar] [CrossRef]
- Wang, Z.; Li, Y.; Li, Y.; Zhao, J.; Huang, Y.; Shao, S. Research on Compound Scattering Modeling and Imaging Methods of Sea Surface Ship Target for GEO-UAV BiSAR. In Proceedings of the 2022 3rd China International SAR Symposium (CISS), Shanghai, China, 2–4 November 2022; pp. 1–5. [Google Scholar]
- Qiu, X.; Hu, D.; Ding, C. An Improved NLCS Algorithm With Capability Analysis for One-Stationary BiSAR. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3179–3186. [Google Scholar] [CrossRef]
- Neo, Y.L.; Wong, F.H.; Cumming, I.G. Processing of Azimuth-Invariant Bistatic SAR Data Using the Range Doppler Algorithm. IEEE Trans. Geosci. Remote Sens. 2008, 46, 14–21. [Google Scholar] [CrossRef]
- Qiu, X.; Hu, D.; Ding, C. An Omega-K Algorithm With Phase Error Compensation for Bistatic SAR of a Translational Invariant Case. IEEE Trans. Geosci. Remote Sens. 2008, 46, 2224–2232. [Google Scholar]
- Wang, R.; Loffeld, O.; Nies, H.; Knedlik, S.; Ender, J.H.G. Chirp-Scaling Algorithm for Bistatic SAR Data in the Constant-Offset Configuration. IEEE Trans. Geosci. Remote Sens. 2009, 47, 952–964. [Google Scholar] [CrossRef]
- Wen, C.; Huang, Y.; Peng, J.; Wu, J.; Zheng, G.; Zhang, Y. Slow-Time FDA-MIMO Technique With Application to STAP Radar. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 74–95. [Google Scholar]
- Qi, C.; Zeng, T.; Li, F. An Improved Nonlinear Chirp Scaling Algorithm with Capability Motion Compensation for One-Stationary BiSAR. In Proceedings of the 2010 IEEE 10th International Conference on Signal Processing, Beijing, China, 24–28 October 2010; pp. 2035–2038. [Google Scholar]
- Li, Z.; Wu, J.; Li, W.; Huang, Y.; Yang, J. One-Stationary Bistatic Side-Looking SAR Imaging Algorithm Based on Extended Keystone Transforms and Nonlinear Chirp Scaling. IEEE Geosci. Remote Sens. Lett. 2013, 10, 211–215. [Google Scholar]
- Tang, W.; Huang, B.; Zhang, S.; Wang, W.; Liu, W. Focusing of Spaceborne SAR Data Using the Improved Nonlinear Chirp Scaling Algorithm. In Proceedings of the 2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 6555–6558. [Google Scholar]
- Guo, Y.; Huang, P.; Xi, P.; Liu, X.; Liao, G.; Chen, G.; Liu, Y.; Lin, X. A Modified Omega-k Algorithm Based on A Range Equivalent Model for Geo Spaceborne-airborne Bisar Imaging. In Proceedings of the 2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 17–22 July 2022; pp. 1844–1847. [Google Scholar]
- Xie, H.; Chen, L.; An, D.; Huang, X.; Zhou, Z. Back-Projection Algorithm Based on Elliptical Polar Coordinate for Low Frequency Ultra Wide Band One-Stationary Bistatic SAR Imaging. In Proceedings of the 2012 IEEE 11th International Conference on Signal Processing, Beijing, China, 21–25 October 2012; pp. 1984–1988. [Google Scholar]
- Yegulalp, A.F. Fast Backprojection Algorithm for Synthetic Aperture Radar. In Proceedings of the 1999 IEEE Radar Conference. Radar into the Next Millennium, Waltham, MA, USA, 22–22 April 1999; pp. 60–65. [Google Scholar]
- Ulander, L.M.H.; Hellsten, H.; Stenstrom, G. Synthetic-Aperture Radar Processing Using Fast Factorized Back-Projection. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 760–776. [Google Scholar] [CrossRef]
- Ulander, L.M.H.; Flood, B.; Froelind, P.-O.; Jonsson, T.; Gustavsson, A.; Rasmusson, J.; Stenstroem, G.; Barmettler, A.; Meier, E. Bistatic Experiment with Ultra-Wideband VHF-Band Synthetic-Aperture Radar. In Proceedings of the 7th European Conference on Synthetic Aperture Radar, Friedrichshafen, Germany, 2–5 June 2008; pp. 1–4. [Google Scholar]
- Ulander, L.M.H.; Froelind, P.-O.; Gustavsson, A.; Murdin, D.; Stenstroem, G. Fast Factorized Back-Projection for Bistatic SAR Processing. In Proceedings of the 8th European Conference on Synthetic Aperture Radar, Aachen, Germany, 7–10 June 2010; pp. 1–4. [Google Scholar]
- Rodriguez-Cassola, M.; Prats, P.; Krieger, G.; Moreira, A. Efficient Time-Domain Image Formation with Precise Topography Accommodation for General Bistatic SAR Configurations. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 2949–2966. [Google Scholar] [CrossRef]
- Vu, V.T.; Sjogren, T.K.; Pettersson, M.I. Fast Time-Domain Algorithms for UWB Bistatic SAR Processing. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1982–1994. [Google Scholar] [CrossRef]
- Xie, H.; An, D.; Huang, X.; Zhou, Z. Fast Time-Domain Imaging in Elliptical Polar Coordinate for General Bistatic VHF/UHF Ultra-Wideband SAR With Arbitrary Motion. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 879–895. [Google Scholar] [CrossRef]
- Xie, H.; Shi, S.; An, D.; Wang, G.; Wang, G.; Xiao, H.; Huang, X.; Zhou, Z.; Xie, C.; Wang, F.; et al. Fast Factorized Backprojection Algorithm for One-Stationary Bistatic Spotlight Circular SAR Image Formation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 1494–1510. [Google Scholar] [CrossRef]
- Feng, D.; An, D.; Huang, X. An Extended Fast Factorized Back Projection Algorithm for Missile-Borne Bistatic Forward-Looking SAR Imaging. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 2724–2734. [Google Scholar] [CrossRef]
- Pu, W.; Wu, J.; Huang, Y.; Yang, J.; Yang, H. Fast Factorized Backprojection Imaging Algorithm Integrated With Motion Trajectory Estimation for Bistatic Forward-Looking SAR. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 3949–3965. [Google Scholar] [CrossRef]
- Li, Y.; Xu, G.; Zhou, S.; Xing, M.; Song, X. A Novel CFFBP Algorithm With Noninterpolation Image Merging for Bistatic Forward-Looking SAR Focusing. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5225916. [Google Scholar] [CrossRef]
- Zhou, S.; Yang, L.; Zhao, L.; Wang, Y.; Zhou, H.; Chen, L.; Xing, M. A New Fast Factorized Back Projection Algorithm for Bistatic Forward-Looking SAR Imaging Based on Orthogonal Elliptical Polar Coordinate. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 1508–1520. [Google Scholar] [CrossRef]
- Bao, M.; Zhou, S.; Yang, L.; Xing, M.; Zhao, L. Data-Driven Motion Compensation for Airborne Bistatic SAR Imagery Under Fast Factorized Back Projection Framework. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 1728–1740. [Google Scholar] [CrossRef]
- Xu, G.; Zhou, S.; Yang, L.; Deng, S.; Wang, Y.; Xing, M. Efficient Fast Time-Domain Processing Framework for Airborne Bistatic SAR Continuous Imaging Integrated With Data-Driven Motion Compensation. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–15. [Google Scholar] [CrossRef]
- Vu, V.T.; Pettersson, M.I. Nyquist Sampling Requirements for Polar Grids in Bistatic Time-Domain Algorithms. IEEE Trans. Signal Process. 2015, 63, 457–465. [Google Scholar] [CrossRef]
- Jakowatz, C.V., Jr.; Wahl, D.E. Considerations for Autofocus of Spotlight-Mode SAR Imagery Created Using a Beamforming Algorithm. In Proceedings of the SPIE Defense, Security, and Sensing, Orlando, FL, USA, 1 May 2009; p. 73370A. [Google Scholar]
- Zhang, S.; Long, T.; Zeng, T.; Ding, Z. Space-Borne Synthetic Aperture Radar Received Data Simulation Based on Airborne SAR Image Data. Adv. Space Res. 2008, 41, 1818–1821. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subaperture Length | Bistatic EP FFBP (Sampling Point) | Proposed Bistatic FFBP (Sampling Point) | Upgrade Factor |
|---|---|---|---|
| 256 | 25 | 20 | 20% |
| 512 | 61 | 46 | 25% |
| 1024 | 96 | 80 | 17% |
| Parameters | Values | Parameters | Values | |
|---|---|---|---|---|
| BiSAR System | Center frequency | 350 MHz | Signal bandwidth | 200 MHz |
| Pulse duration | 1 µs | Pulse repetition frequency | 500 Hz | |
| Sampling frequency | 220 MHz | Synthetic aperture time | 3.66 s | |
| GEO Satellite | Orbital semi-major axis | 42,164 km | Orbital eccentricity | 0.005 |
| Orbital inclination | 57° | Perigee argument | 90° | |
| Initial coordinates | (1.5, −3.5, 0.25) × 107 m | Normal velocity | 1424.3 m/s | |
| UAV | Height | 500 m | Normal velocity | 300 m/s |
| Initial coordinates | (0, 0, 500) m |
| IRW (m) | PSLR (dB) | ISLR (dB) | |||||
|---|---|---|---|---|---|---|---|
| Azimuth | Range | Azimuth | Range | Azimuth | Range | ||
| Target A | Bistatic BP | 0.96 | 0.68 | −15.31 | −15.49 | −12.05 | −13.35 |
| Bistatic EP FFBP | 0.97 | 0.73 | −15.16 | −18.66 | −12.03 | −16.79 | |
| Proposed bistatic FFBP | 0.98 | 0.74 | −15.29 | −18.65 | −11.90 | −16.68 | |
| Target B | Bistatic BP | 0.95 | 0.69 | −15.37 | −15.48 | −12.01 | −13.32 |
| Bistatic EP FFBP | 0.96 | 0.74 | −15.16 | −18.59 | −11.89 | −16.78 | |
| Proposed bistatic FFBP | 0.97 | 0.74 | −14.23 | −18.58 | −11.61 | −16.68 | |
| Target C | Bistatic BP | 0.95 | 0.69 | −15.40 | −15.51 | −11.85 | −13.34 |
| Bistatic EP FFBP | 0.95 | 0.74 | −15.28 | −18.66 | −11.84 | −16.80 | |
| Proposed bistatic FFBP | 0.96 | 0.73 | −15.89 | −18.72 | −12.02 | −16.71 | |
| Imaging Scene Size (Azimuth × Range) | Bistatic BP | Bistatic EP FFBP | Proposed Bistatic FFBP | Speed-Up Factor (BP/EP FFBP) |
|---|---|---|---|---|
| (100 × 100) m | 12.69 s | 7.67 s | 6.82 s | 1.86/1.12 |
| (300 × 300) m | 84.13 s | 19.63 s | 15.88 s | 5.30/1.24 |
| (500 × 500) m | 219.53 s | 36.58 s | 29.11 s | 7.61/1.26 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, X.; Xie, H.; Zhang, L.; Hu, J.; He, J.; Yi, S.; Jiang, H.; Xie, K. Fast Factorized Backprojection Algorithm in Orthogonal Elliptical Coordinate System for Ocean Scenes Imaging Using Geosynchronous Spaceborne–Airborne VHF UWB Bistatic SAR. Remote Sens. 2023, 15, 2215. https://doi.org/10.3390/rs15082215
Hu X, Xie H, Zhang L, Hu J, He J, Yi S, Jiang H, Xie K. Fast Factorized Backprojection Algorithm in Orthogonal Elliptical Coordinate System for Ocean Scenes Imaging Using Geosynchronous Spaceborne–Airborne VHF UWB Bistatic SAR. Remote Sensing. 2023; 15(8):2215. https://doi.org/10.3390/rs15082215
Chicago/Turabian StyleHu, Xiao, Hongtu Xie, Lin Zhang, Jun Hu, Jinfeng He, Shiliang Yi, Hejun Jiang, and Kai Xie. 2023. "Fast Factorized Backprojection Algorithm in Orthogonal Elliptical Coordinate System for Ocean Scenes Imaging Using Geosynchronous Spaceborne–Airborne VHF UWB Bistatic SAR" Remote Sensing 15, no. 8: 2215. https://doi.org/10.3390/rs15082215