
Parallel Computation of Multi-GNSS and Multi-Frequency Inter-Frequency Clock Biases and Observable-Specific Biases



Abstract
:1. Introduction
2. Methodology
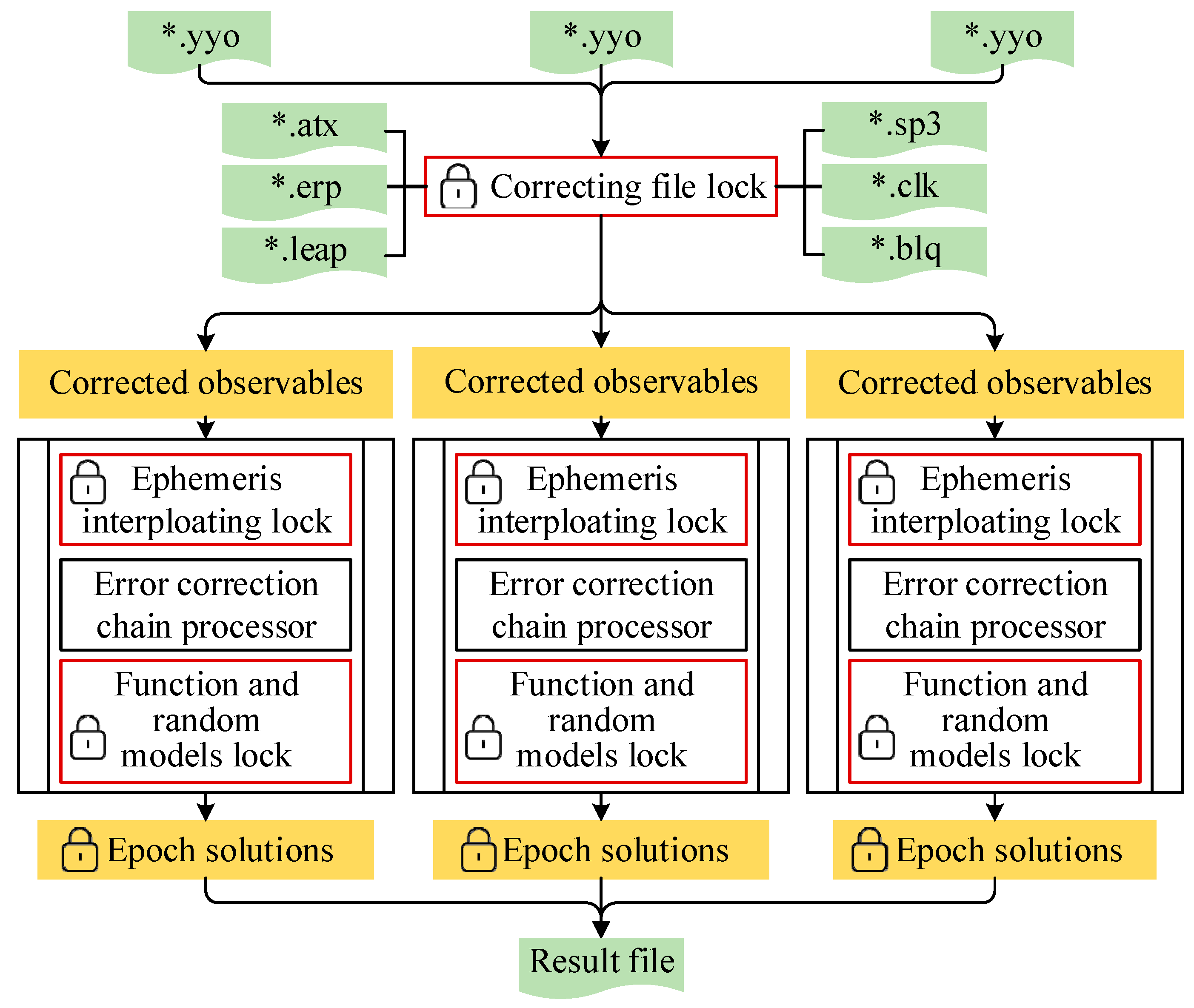
2.1. Parallel Resolution of Undifferenced and Uncombined PPP
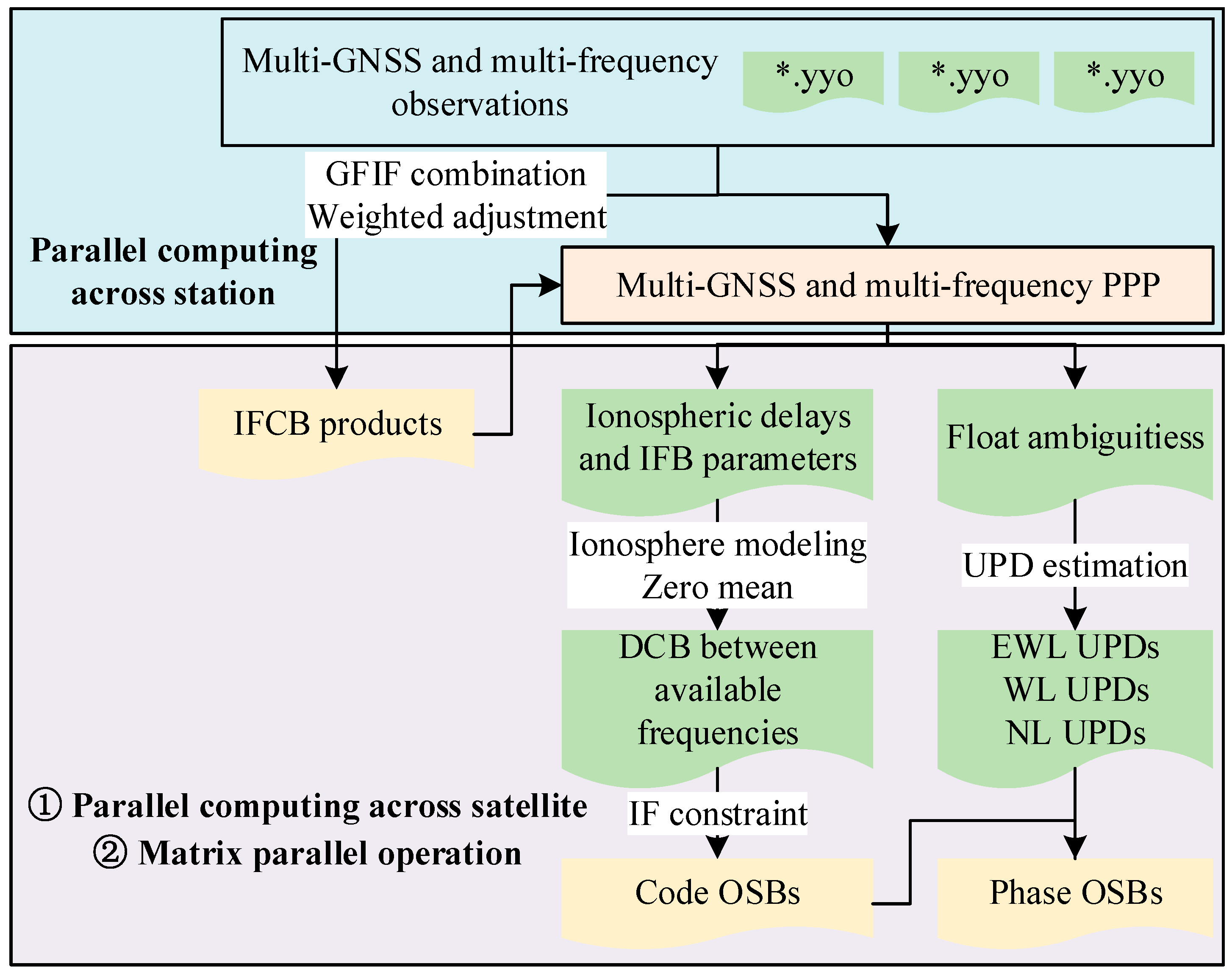
2.2. Parallel Estimation of IFCBs
2.3. Parallel Estimation of Code OSBs
2.4. Parallel Estimation of Phase OSBs
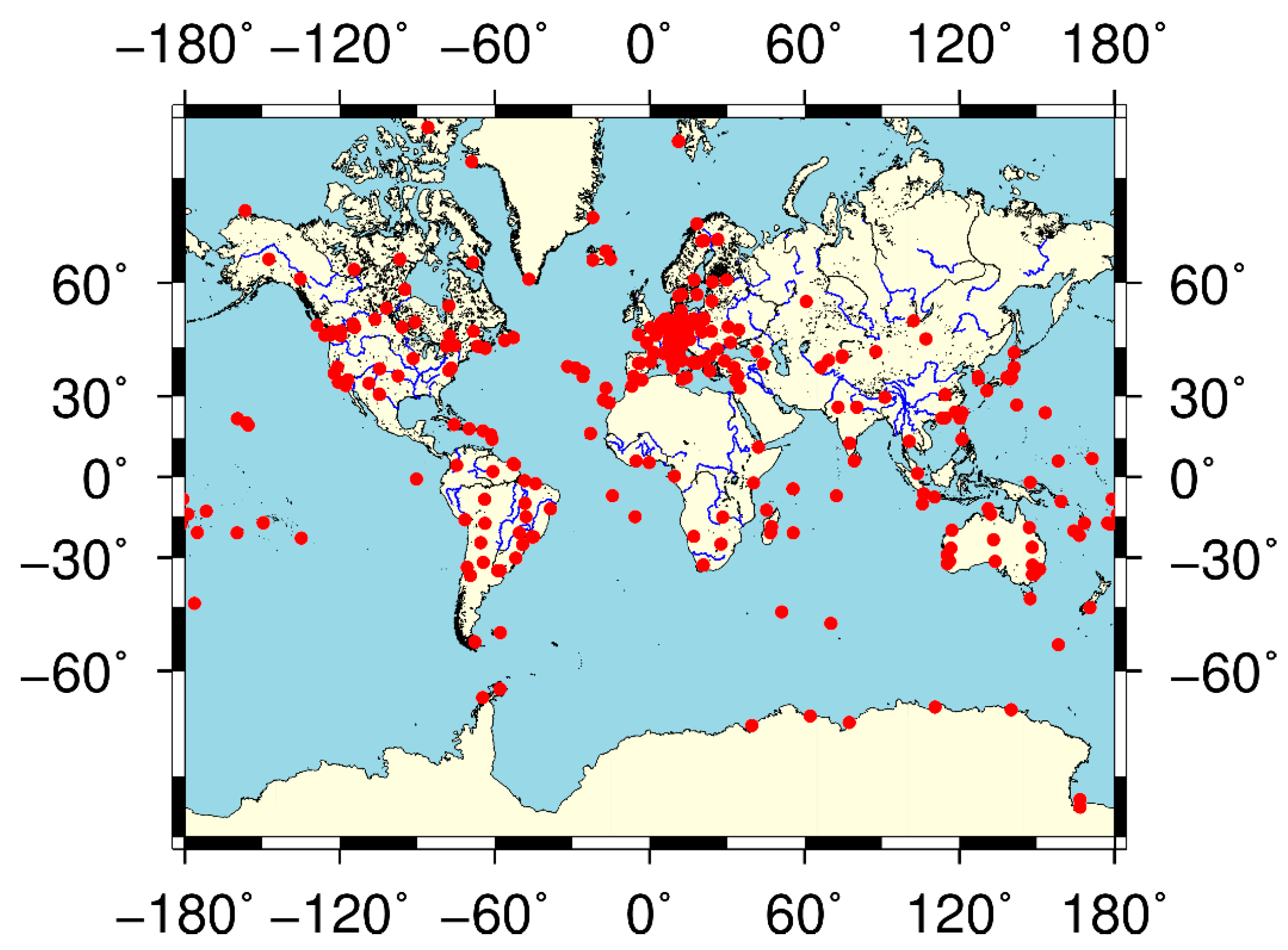
3. Experimental Data and Parameter Estimation Strategy
4. Experimental Results and Discussions
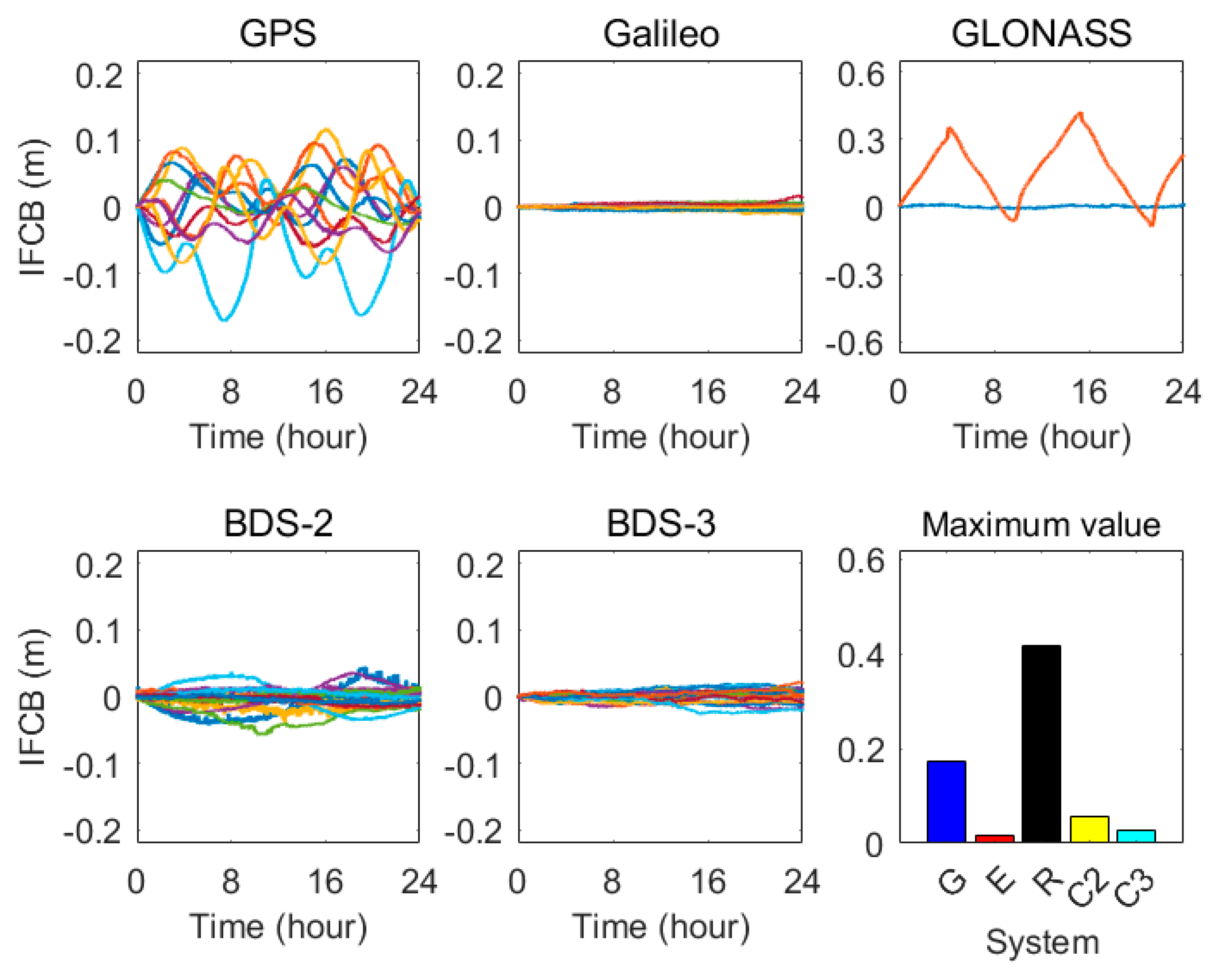
4.1. Characteristic of Multi-GNSS IFCBs
- (1)
- For the 12 GPS Block IIF satellites, the IFCB errors reach more than 0.1 m, which is nonnegligible and must be carefully calibrated when using the triple-frequency observations, and the phenomenon has been first founded by Montenbruck et al. [15]. The newly launched Block III satellite has a small magnitude of IFCB errors;
- (2)
- With the IFCB amplitude of more than 5 cm, the same phenomenon has been occurred on some BDS-2 satellites, and this has been reported by Pan et al. [39];
- (3)
- Among the GLONASS constellation, in addition to transmitting traditional FDMA signals, a code division multiple access (CDMA) signal at 1202.025 Hz can be broadcast by 4 M+ satellites and 2 K1 satellites. During the selected period, the ground stations can track the G3 signal from K1 satellite R09 and M+ satellite R21. It can be seen that the variation of IFCB errors for R09 is tiny and stable, while that of R21 is fluctuating, and periodical variation has also been observed [40];
- (4)
- Currently, the BDS-3 satellites broadcast service on six frequencies, namely, B1C, B1I, B2a, B2b, B2a+b, and B3I. The IFCB errors of BDS-3 satellites are relatively small and can be neglected during the precise observation data handling, which has been pointed by Pan et al. [39];
- (5)
- The Galileo satellite shows the smallest IFCB errors among these four GNSS constellations. The possible reasons can be attributed to the better manufacturing process and high-performance satellite atomic clock.
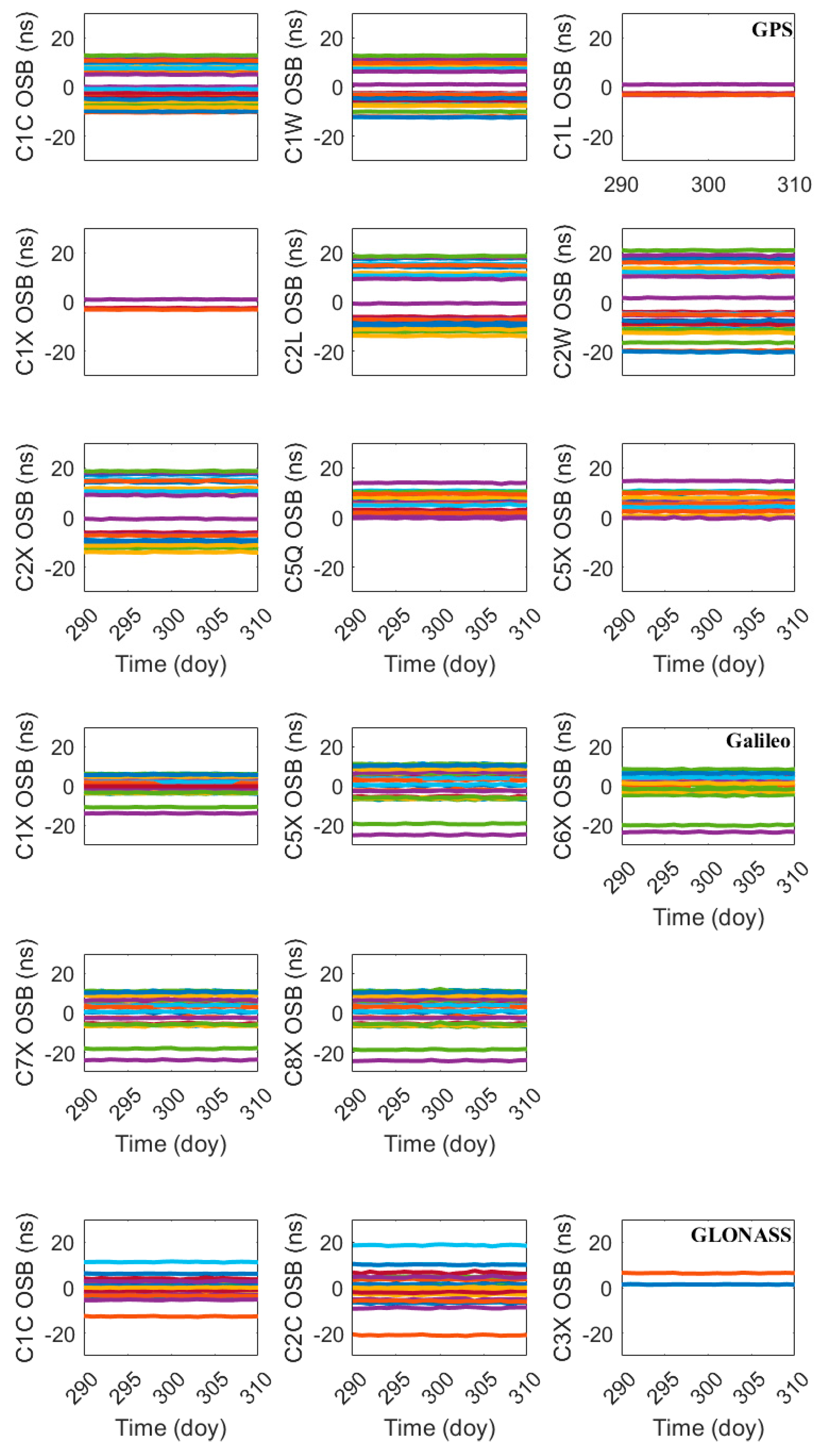
4.2. Characteristic of Code OSBs
- (1)
- Among those systems, the satellite code OSBs of GPS are the most stable, and their average STD is less than 0.10 ns;
- (2)
- Currently, all the 26 Galileo satellites are able to provide five-frequency signals. It can be seen that all these code OSBs are generally stable and, owing to the special Alt-BOC modulation, the code OSBs on E5a (C5X), E5b (C7X), and E5ab (C8X) are highly consistent, which has also been discussed in Li et al. [14];
- (3)
- For GLONASS satellites, the STDs of C1C, C2C, and C3X OSBs are 0.13, 0.21, 0.11 ns, respectively. The code OSB on the G3 CDMA signal shows slightly better stability than the other two FDMA frequencies;
- (4)
- The magnitudes of BDS-2 and BDS-3 code OSBs are approximately 100 and 200 ns, respectively, which are larger than other systems. The BDS3 code OSBs show slightly better stability than the BDS2 code OSBs.
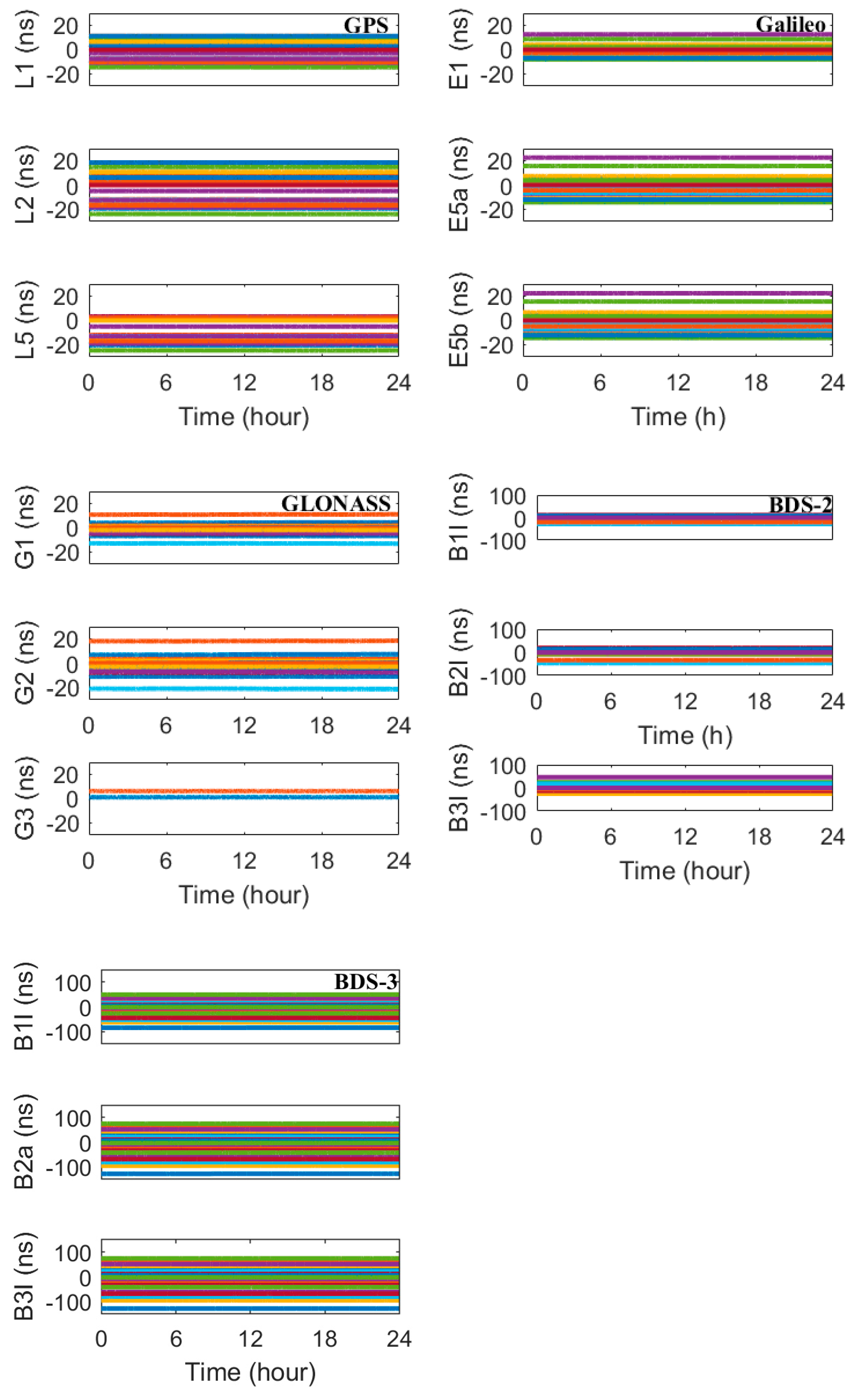
4.3. Characteristic of Phase OSBs
- (1)
- With an average STD less than 0.05 ns, the phase OSBs of GPS, Galileo, BDS-2, and BDS-3 satellites are very stable, wherein Galileo shows the optimal result. The possible reason may also be attributable to the high-performance atomic clocks that Galileo utilized;
- (2)
- For GLONASS satellite, the STDs of G1, G2, and G3 phase OSBs are 0.08, 0.11, and 0.09 ns, respectively, which are slightly larger than those of other systems. The possible reason could be due to the GLONASS IFBs, although the same receiver type is selected, there is slight difference in the receiver version number, which will bring biases for phase OSBs estimation.
4.4. Evaluation of Parallel Acceleration Ratio
5. Discussions
6. Conclusions
- Among multiple systems, the IFCBs of GPS Block IIF and GLONASS M+ satellites present periodical variation, and their amplitudes are nonnegligible, wherein the GLONASS M+ satellite R21 shows the largest IFCB of more than 0.60 m;
- For all the four systems, the daily code OSBs present high stability with average STDs smaller than 0.20 ns, among which GPS presents the smallest STD of 0.10 ns;
- The phase OSBs show the stability of better than 0.10 ns, wherein the Galileo satellites presents the optimal performance of 0.01 ns;
- Under a multicore platform, the acceleration effect is significant, which can significantly shorten the computation time for IFCBs and OSBs estimation.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Teunissen, P.J.G.; Montenbruck, O. Springer Handbook of Global Navigation Satellite Systems; Springer: Cham, Switzerland, 2017; pp. 3–22. [Google Scholar]
- Hein, G.W. Status, perspectives and trends of satellite navigation. Satell. Navig. 2020, 1, 22. [Google Scholar] [CrossRef]
- Montenbruck, O.; Hauschild, A.; Steigenberger, P. Differential code bias estimation using multi-GNSS observations and global ionosphere maps. Navigation 2014, 61, 191–201. [Google Scholar] [CrossRef]
- Zhang, B.; Teunissen, P.J.G.; Yuan, Y.; Zhang, X.; Li, M. A modified carrier-to-code leveling method for retrieving ionospheric observables and detecting short-term temporal variability of receiver differential code biases. J. Geod. 2019, 93, 19–28. [Google Scholar] [CrossRef] [Green Version]
- Ge, M.; Gendt, G.; Rothacher, m.; Shi, C.; Liu, J. Resolution of GPS carrier-phase ambiguities in precise point positioning (PPP) with daily observations. GPS Solut. 2008, 82, 389–399. [Google Scholar]
- Zhang, B.; Teunissen, P.J.G.; Yuan, Y. On the short-term temporal variations of GNSS receiver differential phase biases. J. Geod. 2017, 91, 563–572. [Google Scholar] [CrossRef] [Green Version]
- Deng, Y.; Guo, F.; Ren, X.; Ma, F.; Zhang, X. Estimation and analysis of multi-GNSS observable-specific code biases. GPS Solut. 2021, 25, 100. [Google Scholar] [CrossRef]
- Wang, N.; Li, Z.; Duan, B.; Hugentobler, U.; Wang, L. GPS and GLONASS observable-specific code bias estimation: Comparison of solutions from the IGS and MGEX networks. J. Geod. 2020, 94, 74. [Google Scholar] [CrossRef]
- Li, M.; Yuan, Y. Estimation and analysis of the observable-specific code biases estimated using multi-GNSS observations and global ionospheric maps. Remote Sens. 2021, 13, 3096. [Google Scholar] [CrossRef]
- Schaer, S. SINEX BIAS-solution (software/technique) INdependent EXchange format for GNSS biases version 1.00. In Proceedings of the IGS Workshop on GNSS Biases, Bern, Switzerland, 8–12 February 2016; pp. 1–37. [Google Scholar]
- Schaer, S.; Villiger, A.; Arnold, D.; Dach, R.; Prange, L.; Jäggi, A. The CODE ambiguity-fixed clock and phase bias analysis products: Generation, properties, and performance. J. Geod. 2021, 95, 81. [Google Scholar] [CrossRef]
- Liu, T.; Zhang, B. Estimation of code observation-specific biases (OSBs) for the modernized multi-frequency and multi-GNSS signals: An undifferenced and uncombined approach. J. Geod. 2021, 95, 97. [Google Scholar] [CrossRef]
- Geng, J.; Zhang, Q.; Li, G.; Liu, J.; Liu, D. Observable-specific phase biases of Wuhan multi-GNSS experiment analysis center’s rapid satellite products. Satell. Navig. 2022, 3, 23. [Google Scholar] [CrossRef]
- Li, X.; Li, X.; Jiang, Z.; Xia, C.; Shen, Z.; Wu, J. A unified model of GNSS phase/code bias calibration for PPP ambiguity resolution with GPS, BDS, Galileo and GLONASS multi-frequency observations. GPS Solut. 2022, 26, 84. [Google Scholar] [CrossRef]
- Montenbruck, O.; Hugentobler, U.; Dach, R.; Steigenberger, P.; Hauschild, A. Apparent clock variations of the Block IIF-1 (SVN62) GPS satellite. GPS Solut. 2012, 16, 303–313. [Google Scholar] [CrossRef]
- Boomkamp, H. Global GPS reference frame solutions of unlimited size. Adv. Space Res. 2010, 46, 136–143. [Google Scholar] [CrossRef]
- Kuang, K.; Zhang, S.; Li, J. Real-time GPS satellite orbit and clock estimation based on OpenMP. Adv. Space Res. 2019, 63, 2378–2386. [Google Scholar] [CrossRef]
- Li, L.; Lu, Z.; Chen, Z.; Cui, Y.; Kuang, Y.; Wang, F. Parallel computation of regional CORS network corrections based on ionospheric-free PPP. GPS Solut. 2019, 23, 70. [Google Scholar] [CrossRef]
- Chen, X.; Ge, M.; Hugentobler, U.; Schuh, H. A new parallel algorithm for improving the computational efficiency of multi-GNSS precise orbit determination. GPS Solut. 2022, 26, 83. [Google Scholar] [CrossRef]
- Bertiger, W.; Bar-Sever, Y.; Dorsey, A.; Haines, B.; Harvey, N.; Hemberger, D.; Heflin, M.; Lu, W.; Miller, M.W.; Moore, A.; et al. GipsyX/RTGx, a new tool set for space geodetic operations and research. Adv. Space Res. 2020, 66, 469–489. [Google Scholar] [CrossRef]
- Li, L.; Lu, Z.; Chen, Z.; Cui, Y.; Sun, D.; Wang, Y.; Kuang, Y.; Wang, F. GNSSer: Objected-oriented and design pattern-based software for GNSS data parallel processing. J. Spat. Sci. 2021, 66, 27–47. [Google Scholar] [CrossRef]
- Li, H.; Zhou, X.; Wu, B.; Wang, J. Estimation of the inter-frequency clock bias for the satellites of PRN25 and PRN01. Sci. China Phys. Mech. Astron. 2012, 55, 2186–2193. [Google Scholar] [CrossRef]
- Fan, L.; Shi, C.; Li, M.; Wang, C.; Zheng, F.; Jing, G.; Zhang, J. GPS satellite inter-frequency clock bias estimation using triple-frequency raw observations. J. Geod. 2019, 93, 2465–2479. [Google Scholar] [CrossRef]
- Li, L.; Lu, Z.; Cui, Y.; Wang, Y.; Huang, X. Parallel resolution of large-scale GNSS network un-difference ambiguity. Adv. Space Res. 2017, 60, 2637–2647. [Google Scholar] [CrossRef]
- Zhang, F.; Chai, H.; Wang, M.; Bai, T.; Li, L.; Guo, W.; Du, Z. Considering inter-frequency clock bias for GLONASS FDMA + CDMA precise point positioning. GPS Solut. 2023, 27, 10. [Google Scholar] [CrossRef]
- Pan, L.; Zhang, X.; Li, X.; Liu, J.; Li, X. Characteristics of inter-frequency clock bias for Block IIF satellites and its effect on triple-frequency GPS precise point positioning. GPS Solut. 2017, 21, 811–822. [Google Scholar] [CrossRef]
- Cui, Y.; Lu, Z.; Chen, Z.; Wang, Y.; Lu, H. Research of parallel data processing for GNSS network adjustment under multi-core environment. Acta Geod. Cartogr. Sin. 2013, 42, 661–667. [Google Scholar]
- Montenbruck, O.; Hauschild, A. Code biases in multi-GNSS point positioning. In Proceedings of the International Technical Meeting of The Institute of Navigation (ION ITM), San Diego, CA, USA, 27–29 January 2013; pp. 616–628. [Google Scholar]
- Dong, D.; Bock, Y. Global Positioning System network analysis with phase ambiguity resolution applied to crustal deformation studies in California. J. Geophys. Res. 1989, 94, 3949–3966. [Google Scholar] [CrossRef]
- Li, L.; Cui, Y.; Wang, Y.; Lu, Z. Improvement of narrow-lane fractional cycle bias estimation and analysis of its time-varying Property. Acta Geod. Cartogr. Sin. 2017, 46, 34–43. [Google Scholar]
- Wanninger, L.; Beer, S. BeiDou satellite-induced code pseudorange variations, diagnosis and therapy. GPS Solut. 2015, 19, 639–648. [Google Scholar] [CrossRef] [Green Version]
- Beer, S.; Wanninger, L.; Hesselbarth, A. Estimation of absolute GNSS satellite antenna group delay variations based on those of absolute receiver antenna group delays. GPS Solut. 2021, 25, 110. [Google Scholar] [CrossRef]
- Zhou, F.; Dong, D.; Ge, M.; Li, P.; Wickert, J.; Schuh, H. Simultaneous estimation of GLONASS pseudorange inter-frequency biases in precise point positioning using undifferenced and uncombined observations. GPS Solut. 2018, 22, 19. [Google Scholar] [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Prange, L.; Deng, Z.; Zhao, Q.; Perosanz, F.; Schmid, R. The Multi-GNSS experiment (MGEX) of the international GNSS service (IGS)-achievements, prospects and challenges. Adv. Space Res. 2017, 59, 1671–1697. [Google Scholar] [CrossRef]
- Huang, L.; Zhai, G.; Ouyang, Y.; Lu, X.; Wu, T.; Deng, K. Triple-frequency TurboEdit cycle-slip processing method of weakening ionospheric activity. Acta Geod. Cartogr. Sin. 2015, 44, 840–847. [Google Scholar]
- Saastamoinen, J. Atmospheric correction for the troposphere and stratosphere in radio ranging of satellites. The use of artificial satellites for geodesy. Geophys. Monogr. Ser. 1972, 15, 247–251. [Google Scholar]
- Landskron, D.; Böhm, J. VMF3/GPT3: Refined discrete and empirical troposphere mapping functions. J. Geod. 2018, 92, 349–360. [Google Scholar] [CrossRef]
- Askne, J.; Nordius, H. Estimation of tropospheric delay for microwaves from surface weather data. Radio Sci. 1987, 22, 379–386. [Google Scholar] [CrossRef]
- Pan, L.; Li, X.; Zhang, X.; Li, X.; Lu, C.; Zhao, Q.; Liu, J. Considering inter-frequency clock bias for bds triple- frequency precise point positioning. Remote Sens. 2017, 9, 734. [Google Scholar] [CrossRef] [Green Version]
- Zhang, F.; Chai, H.; Li, L.; Wang, M.; Feng, X.; Du, Z. Understanding the characteristic of GLONASS inter-frequency clock bias using both FDMA and CDMA signals. GPS Solut. 2022, 26, 63. [Google Scholar] [CrossRef]
- Montenbruck, O.; Schmid, R.; Mercier, F.; Steigenberger, P.; Noll, C.; Fatkuline, R.; Koguref, S.; Ganeshan, A.S. GNSS satellite geometry and attitude models. Adv. Space Res. 2015, 56, 1015–1029. [Google Scholar] [CrossRef] [Green Version]
- Su, K.; Jin, S.; Jiao, G. GNSS carrier phase time-variant observable-specific signal bias (OSB) handling: An absolute bias perspective in multi-frequency PPP. GPS Solut. 2022, 26, 71. [Google Scholar] [CrossRef]
- Geng, J.; Guo, J.; Meng, X.; Gao, K. Speeding up PPP ambiguity resolution using triple-frequency GPS/BeiDou/Galileo/QZSS data. J. Geod. 2020, 94, 6. [Google Scholar] [CrossRef] [Green Version]
- Du, S.; Shu, B.; Xie, W.; Huang, G.; Ge, Y.; Li, P. Evaluation of Real-time Precise Point Positioning with Ambiguity Resolution Based on Multi-GNSS OSB Products from CNES. Remote Sens. 2022, 14, 4970. [Google Scholar] [CrossRef]
- Li, B.; Mi, J.; Zhu, H.; Gu, S.; Xu, Y.; Wang, H.; Yang, L.; Chen, Y.; Pang, Y. BDS-3/GPS/Galileo OSB Estimation and PPP-AR Positioning Analysis of Different Positioning Models. Remote Sens. 2022, 14, 4207. [Google Scholar] [CrossRef]
- Chen, H.; Jiang, W.; Ge, M.; Wickert, J.; Schuh, H. An enhanced strategy for GNSS data processing of massive networks. J. Geod. 2014, 88, 857–867. [Google Scholar] [CrossRef]
- Li, L.; Lu, Z.; Li, J.; Kuang, Y.; Wang, F. Parallel resolution of large GNSS networks using carrier ranges. Adv. Space Res. 2020, 66, 2621–2628. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Processing Strategy |
|---|---|
| Sampling interval | 30 s |
| Elevation mask | 7° |
| Weight for observations | Elevation-dependent weight |
| Satellite ephemeris and clock offsets files | GBM post precise products |
| Clock slip and cycle slip | Difference between epochs and modified triple-frequency TurboEdit method |
| Antenna phase offset | igs14 antenna model |
| Tropospheric delay | ZHD is corrected using Saastamoinen + GPT3 ZWD is corrected using Askne and Nordius + GPT3 VMF3 mapping function |
| Ionospheric delay and ISB | Modeled as a random walk, with a power spectrum density of 1.7 × 10−4 and 1.7 × 10−7 m2/s, respectively |
| Tracking station coordinates | Fixed to the IGS daily SINEX files |
| Ambiguity | Modeled as a constant without cycle slips, partial ambiguity fixing, and the ratio value is set as 2.0 |
| Receiver clock offset | White noise |
| System | Frequencies Used to Estimate IFCBs and Phase OSBs | Codes Used to Estimate Code OSBs |
|---|---|---|
| GPS | L1, L2, L5 | C1C, C1W, C1L, C1X, C2L, C2W, C2X, C5Q, C5X |
| Galileo | E1, E5a, E5b | C1X, C5X, C6X, C7X, C8X |
| GLONASS | G1, G2, G3 | C1C, C2C, C3X |
| BDS-2 | B1I, B2I, B3I | C2I, C6I, C7I |
| BDS-3 | B1I, B2a, B3I | C1P, C1X, C2I, C5P, C5X, C6I, C8X |
| Experimental Platform | Processor | Number of Cores | Memory Size |
|---|---|---|---|
| Dell R750 workstation | Intel Xeon gold processor 6314U, 3.40 GHz | 32 cores | 128 GB |
| GPS | Galileo | GLONASS | BDS-2 | BDS-3 | |
|---|---|---|---|---|---|
| STD | 0.10 | 0.21 | 0.17 | 0.23 | 0.21 |
| Single Core | Four Cores | Eight Cores | Sixteen Cores | Thirty-Two Cores | |
|---|---|---|---|---|---|
| Computation time (min) | 438 | 141.30 | 79.20 | 45.35 | 25.70 |
| Acceleration rate | --- | 3.10 | 5.53 | 9.66 | 17.04 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, L.; Yang, Z.; Jia, Z.; Li, X. Parallel Computation of Multi-GNSS and Multi-Frequency Inter-Frequency Clock Biases and Observable-Specific Biases. Remote Sens. 2023, 15, 1953. https://doi.org/10.3390/rs15071953
Li L, Yang Z, Jia Z, Li X. Parallel Computation of Multi-GNSS and Multi-Frequency Inter-Frequency Clock Biases and Observable-Specific Biases. Remote Sensing. 2023; 15(7):1953. https://doi.org/10.3390/rs15071953
Chicago/Turabian StyleLi, Linyang, Zhen Yang, Zhen Jia, and Xin Li. 2023. "Parallel Computation of Multi-GNSS and Multi-Frequency Inter-Frequency Clock Biases and Observable-Specific Biases" Remote Sensing 15, no. 7: 1953. https://doi.org/10.3390/rs15071953