
Inversion of Wind and Temperature from Low SNR FPI Interferograms
 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. FPI Model
2.1. Forward Model
2.2. Inversion Algorithm
- (1)
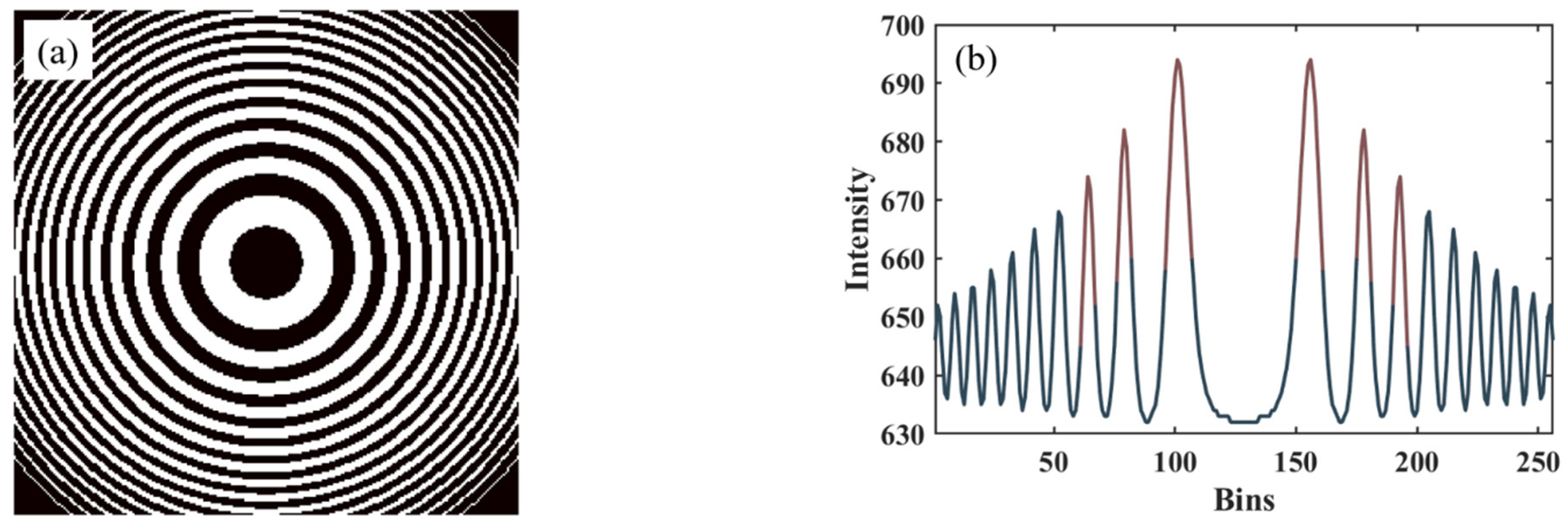
- Binarization. The method thresholds the interferogram and fits rings to obtain the center, as shown in Figure 2a. The median value of all pixels in the image is taken as the threshold. Multiple rings can be fitted simultaneously to improve the stability.
- (2)
- Peak fitting. First, the raw images are filtered using a median filter. [17] Then, the approximate location of the center is determined manually, and a row of pixels is taken out near it to fit each peak, as shown in Figure 2b. The mean of the two peaks of the same order ring is the horizontal coordinate of the center. Similarly, the vertical coordinates can also be obtained. If only one row or column is used to determine the center position, the results will be biased easily due to noise. We used 21 rows and columns in the actual calculation.
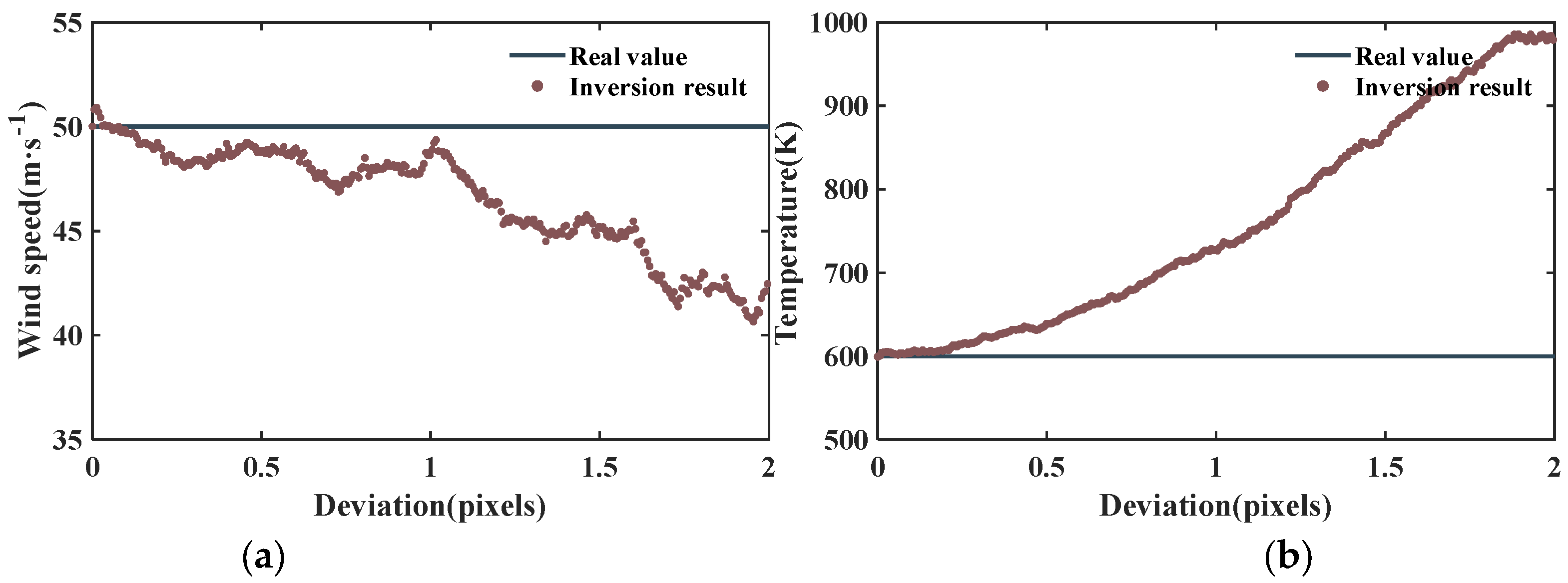
3. Effect of the Center Errors on Wind and Temperature Inversions
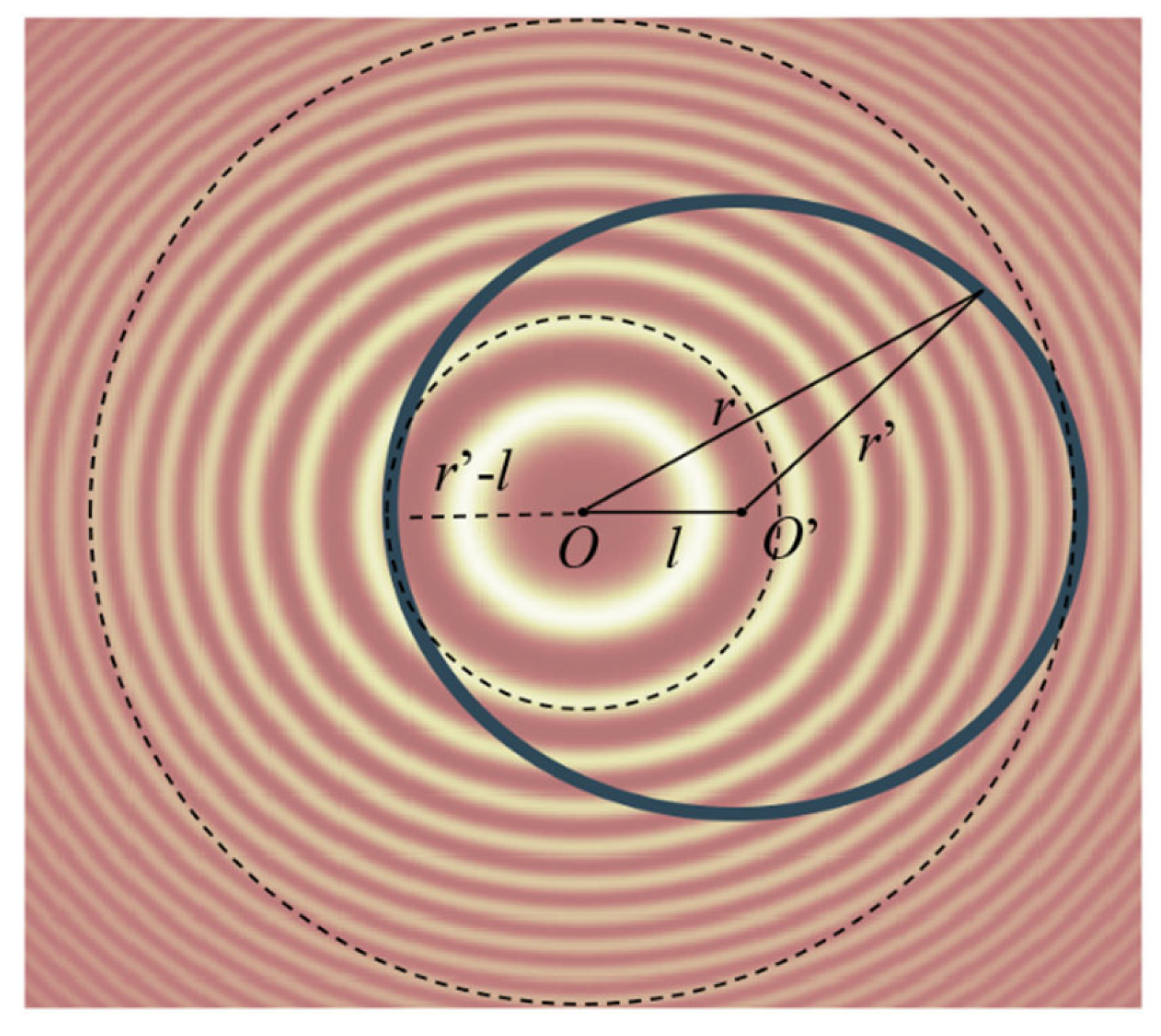
4. A New Algorithm for Determining the Center
4.1. Analysis Process
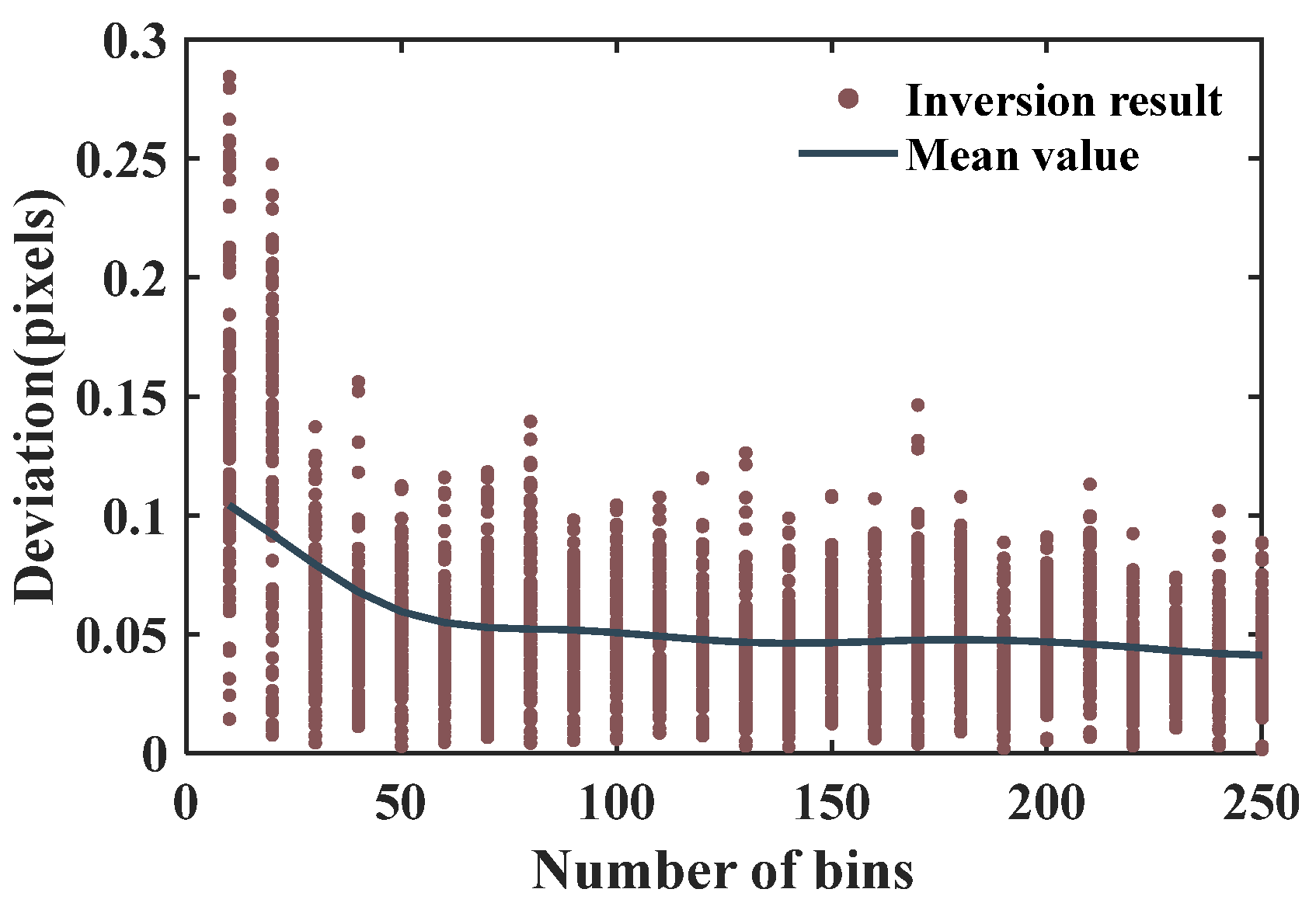
4.2. The MSDM Performance on Noisy and Distortion Interferograms
4.2.1. Gaussian White Noise
4.2.2. Poisson Noise
4.3. Distortion Interferograms
5. Application to Wind and Temperature Inversion from Real Airglow Interferograms
6. Summary
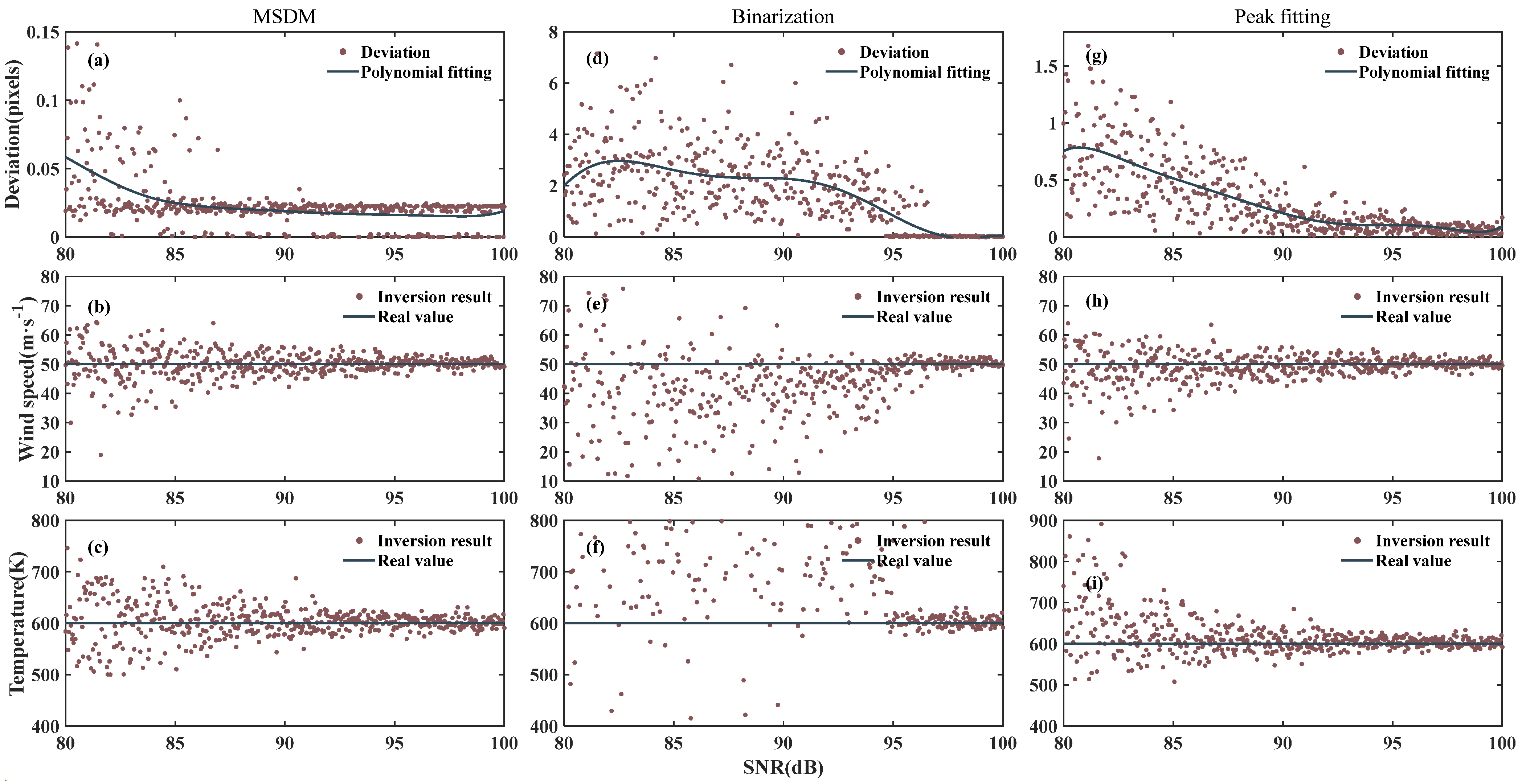
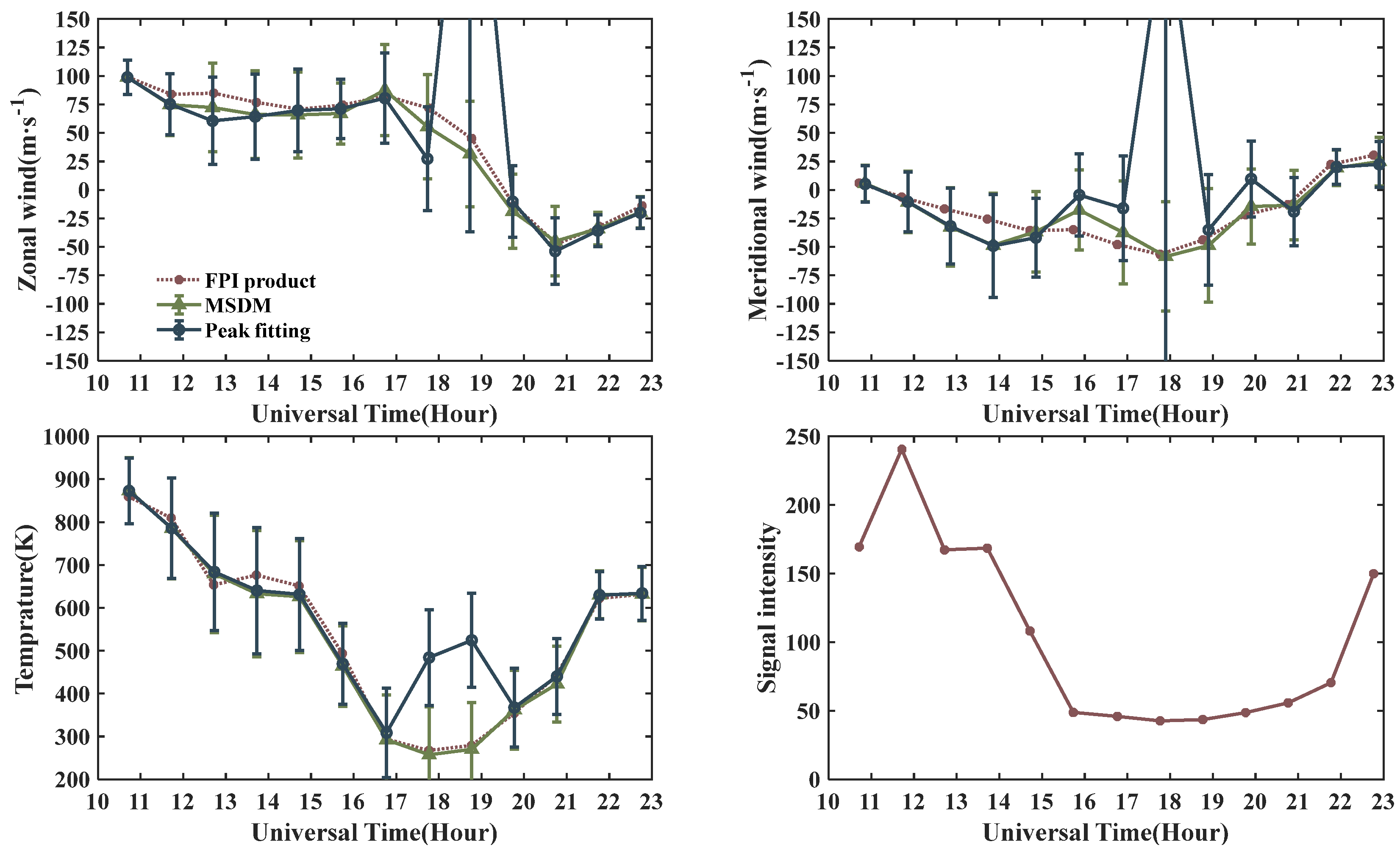
- For Poisson noise, the center deviation of the MSDM is less than 0.05 pixels. The SNR of the images has a great influence on binarization and peak fitting, so more accurate results can only be obtained from high-quality images. Especially for temperature, the MSDM results are in the range of 500 to 750 K.
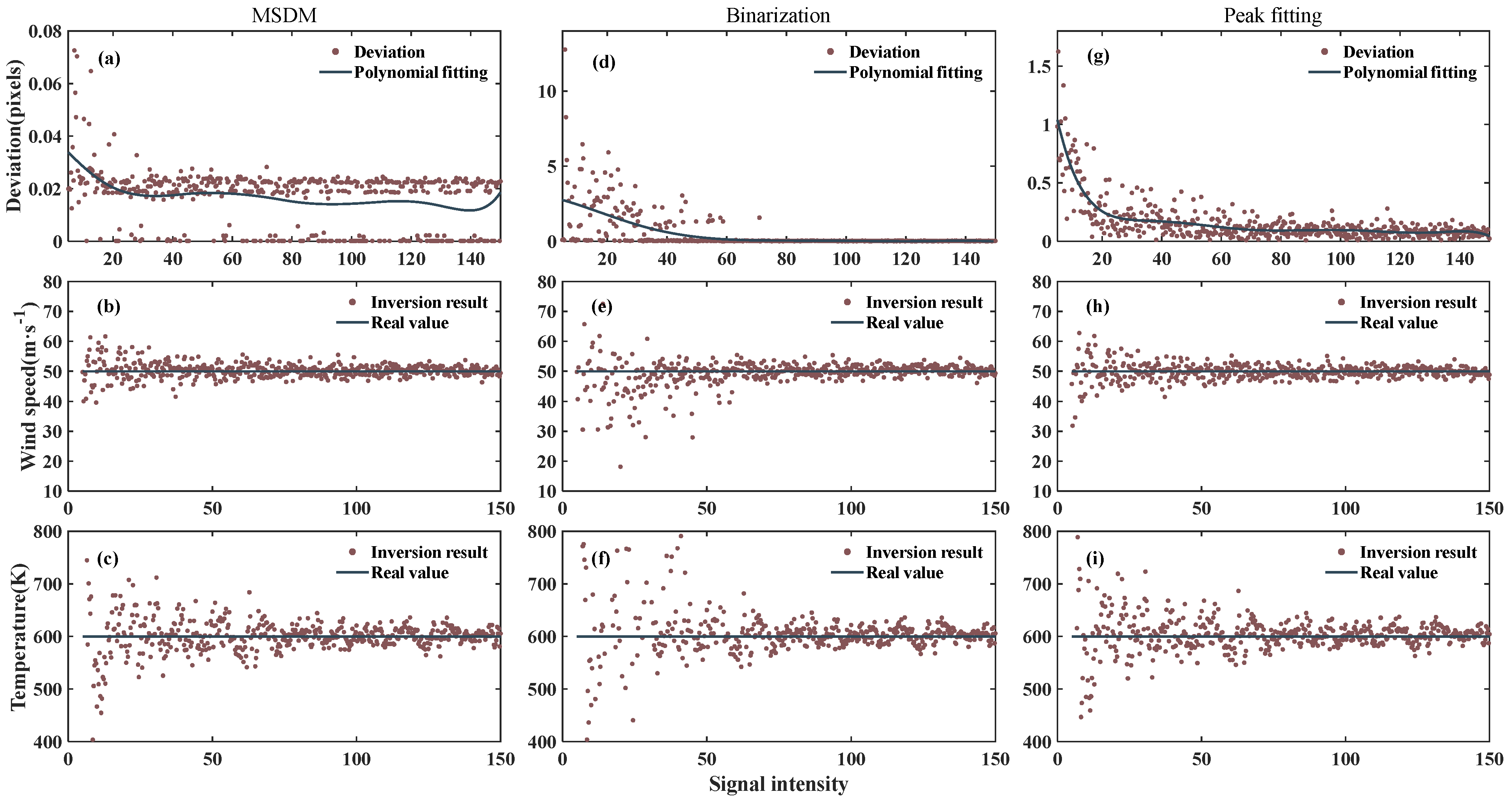
- For Poisson noise, the performance of the MSDM maintains very good performance for different signal intensities. However, binarization and peak fitting are more affected by noise.
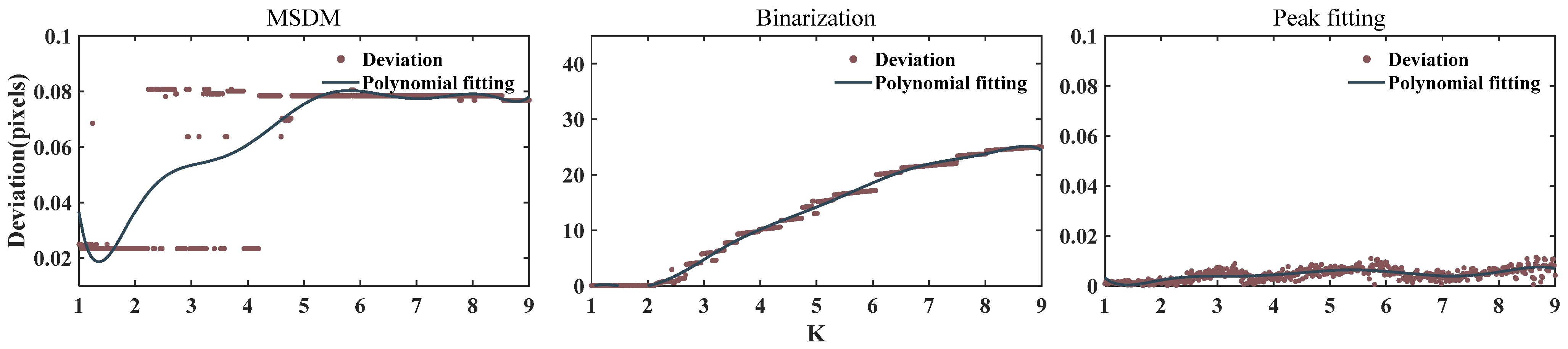
- For distortion interferograms, the binarization method calculates completely wrong centers, while the MSDM and peak fitting give more accurate results.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chapagain, N.P.; Makela, J.J.; Meriwether, J.W.; Fisher, D.J.; Buriti, R.A.; de Medeiros, A.F. Comparison of nighttime zonal neutral winds and equatorial plasma bubble drift velocities over Brazil: Zonal neutral winds and epb velocities. J. Geophys. Res. Atmos. 2012, 117, A06309. [Google Scholar] [CrossRef]
- Sarudin, I.; Hamid, N.S.A.; Abdullah, M.; Buhari, S.M.; Shiokawa, K.; Otsuka, Y.; Hozumi, K.; Jamjareegulgarn, P. Influence of Zonal Wind Velocity Variation on Equatorial Plasma Bubble Occurrences Over Southeast Asia. J. Geophys. Res. Space Phys. 2021, 126, e2020JA028994. [Google Scholar] [CrossRef]
- Rabiu, A.B.; Okoh, D.I.; Wu, Q.; Bolaji, O.S.; Abdulrahim, R.B.; Dare-Idowu, O.E.; Obafaye, A.A. Investigation of the Variability of Night-Time Equatorial Thermospheric Winds Over Nigeria, West Africa. J. Geophys. Res. Space Phys. 2021, 126, e2020JA028528. [Google Scholar] [CrossRef]
- Navarro, L.A.; Fejer, B.G. Storm-Time Thermospheric Winds Over Peru. J. Geophys. Res. Space Phys. 2019, 124, 10415–10427. [Google Scholar] [CrossRef] [Green Version]
- Grawe, M.A.; Chu, K.T.; Makela, J.J. Measurement of atmospheric neutral wind and temperature from Fabry-Perot interferometer data using piloted deconvolution. Appl. Opt. 2019, 58, 3685–3695. [Google Scholar] [CrossRef]
- Liu, X.; Xu, J.; Zhang, S.; Jiang, G.; Zhou, Q.; Yuan, W.; Noto, J.; Kerr, R. Thermospheric planetary wave-type oscillations observed by FPIs over Xinglong and Millstone Hill. J. Geophys. Res. Space Phys. 2014, 119, 6891–6901. [Google Scholar] [CrossRef]
- Liu, Y.; Xu, J.; Liu, X.; Zhang, S.; Yuan, W.; Liu, W.; Wu, K.; Wang, C. Responses of Multiday Oscillations in the Nighttime Thermospheric Temperature to Solar and Geomagnetic Activities Measured by Fabry-Perot Interferometer in China. J. Geophys. Res. Space Phys. 2019, 124, 9420–9429. [Google Scholar] [CrossRef]
- Koomen, M.J.; Gulledge, I.S.; Packer, D.M.; Tousey, R. Night Airglow Observations from Orbiting Spacecraft Compared with Measurements from Rockets. Science 1963, 140, 1087–1089. [Google Scholar] [CrossRef]
- Sparrow, J.G.; Ney, E.P.; Burnett, G.B.; Stoddart, J.W. Airglow observations from OSO-B2 satellite. J. Geophys. Res. 1968, 73, 10. [Google Scholar] [CrossRef]
- Chamberlain, J.W. Physics of the Aurora and Airglow: International Geophysics Series; Elsevier: Amsterdam, The Netherlands, 2016; Volume 2. [Google Scholar]
- Shiokawa, K.; Kadota, T.; Ejiri, M.K.; Otsuka, Y.; Katoh, Y.; Satoh, M.; Ogawa, T. Three-channel imaging fabry-perot interferometer for measurement of mid-latitude airglow. Appl. Opt. 2001, 40, 4286. [Google Scholar] [CrossRef]
- Shiokawa, K.; Otsuka, Y.; Oyama, S.; Nozawa, S.; Satoh, M.; Katoh, Y.; Hamaguchi, Y.; Yamamoto, Y.; Meriwether, J. Development of low-cost sky-scanning Fabry-Perot interferometers for airglow and auroral studies. Earth Planets Space 2012, 64, 1033–1046. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Wang, Y.; Fu, J. A Tiny Fabry-Perot Interferometer with Postpositional Filter for Measurement of the Thermospheric Wind. Acta Geophys. 2016, 64, 2748–2760. [Google Scholar] [CrossRef] [Green Version]
- Wu, Q.; Gablehouse, R.D.; Solomon, S.C.; Killeen, T.L.; She, C.Y. A New Fabry-Perot Interferometer for Upper Atmosphere Research. In Proceedings of the Conference on Instruments, Science, and Methods for Geospace and Planetary Remote Sensing, Honolulu, HI, USA, 9–11 November 2004. [Google Scholar]
- Li, W.; Chen, Y.; Liu, L.; Trondsen, T.S.; Unick, C.; Wyatt, D.; Ning, B.; Li, G.; Huang, C.; Yang, S.; et al. Variations of Thermospheric Winds Observed by a Fabry–Perot Interferometer at Mohe, China. J. Geophys. Res. Space Phys. 2021, 126, e2020JA028655. [Google Scholar] [CrossRef]
- Smith, R.W. Vertical winds: A tutorial. J. Atmos. Solar-Terr. Phys. 1998, 60, 1425–1434. [Google Scholar] [CrossRef]
- Makela, J.J.; Meriwether, J.W.; Huang, Y.; Sherwood, P.J. Simulation and analysis of a multi-order imaging Fabry–Perot interferometer for the study of thermospheric winds and temperatures. Appl. Opt. 2011, 50, 4403. [Google Scholar] [CrossRef]
- Huang, Y.; Makela, J.J.; Swenson, G.R. Simulations of imaging Fabry–Perot interferometers for measuring upper-atmospheric temperatures and winds. Appl. Opt. 2012, 51, 3787. [Google Scholar] [CrossRef]
- Harding, B.J.; Gehrels, T.W.; Makela, J.J. Nonlinear regression method for estimating neutral wind and temperature from Fabry–Perot interferometer data. Appl. Opt. 2014, 53, 666–673. [Google Scholar] [CrossRef] [Green Version]
- Hu, G.; Ai, Y.; Zhang, Y.; Zhang, H.; Liu, J. First scanning Fabry–Perot interferometer developed in China. Chin. Sci. Bull. 2014, 59, 563–570. [Google Scholar] [CrossRef]
- Chanin, G.; Lecullier, J.C. A scanning Fabry-Perot interferometer. Infrared Phys. 1978, 18, 589–594. [Google Scholar] [CrossRef]
- Moiseev, A.V. Scanning Fabry–Perot Interferometer of the 6-m SAO RAS Telescope. Astrophys. Bull. 2021, 76, 316–339. [Google Scholar] [CrossRef]
- Hays, P.B.; Roble, R.G. A Technique for Recovering Doppler Line Profiles from Fabry-Perot Interferometer Fringes of Very Low Intensity. Appl. Opt. 1971, 10, 193. [Google Scholar] [CrossRef] [PubMed]
- Hernandez, G. Analytical Description of a Fabry–Perot Photoelectric Spectrometer. Appl. Opt. 1966, 5, 1745. [Google Scholar] [CrossRef] [PubMed]
- Hernandez, G. Analytical Description of a Fabry-Perot Photoelectric Spectrometer 2: Numerical Results. Appl. Opt. 1970, 9, 1591. [Google Scholar] [CrossRef]
- Niciejewski, R.J.; Killeen, T.L.; Turnbull, M. Ground-based Fabry-Perot interferometry of the terrestrial nightglow with a bare charge-coupled device: Remote field site deployment. Opt. Eng. 1994, 33, 457. [Google Scholar] [CrossRef] [Green Version]
- Vasilyev, R.V.; Artamonov, M.F.; Beletsky, A.B.; Zherebtsov, G.A.; Medvedeva, I.V.; Mikhalev, A.V.; Syrenova, T.E. Registering Upper Atmosphere Parameters in East Siberia with Fabry-Perot Interferometer KEO Scientific “Arinae”. Sol. Terr. Phys. 2017, 3, 61–75. [Google Scholar] [CrossRef] [Green Version]










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, Y.; Gu, S.-Y.; Yang, Z.; Huang, C.; Li, N.; Hu, G.; Dou, X. Inversion of Wind and Temperature from Low SNR FPI Interferograms. Remote Sens. 2023, 15, 1934. https://doi.org/10.3390/rs15071934
Wei Y, Gu S-Y, Yang Z, Huang C, Li N, Hu G, Dou X. Inversion of Wind and Temperature from Low SNR FPI Interferograms. Remote Sensing. 2023; 15(7):1934. https://doi.org/10.3390/rs15071934
Chicago/Turabian StyleWei, Yafei, Sheng-Yang Gu, Zhenlin Yang, Cong Huang, Na Li, Guoyuan Hu, and Xiankang Dou. 2023. "Inversion of Wind and Temperature from Low SNR FPI Interferograms" Remote Sensing 15, no. 7: 1934. https://doi.org/10.3390/rs15071934