
A New Algorithm for Ill-Posed Problem of GNSS-Based Ionospheric Tomography

Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Materials and Methods
2.1. Tomographic Theory
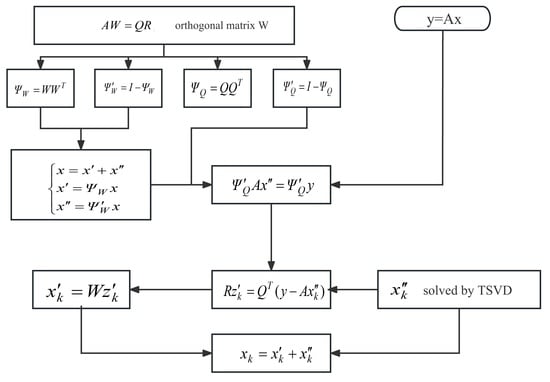
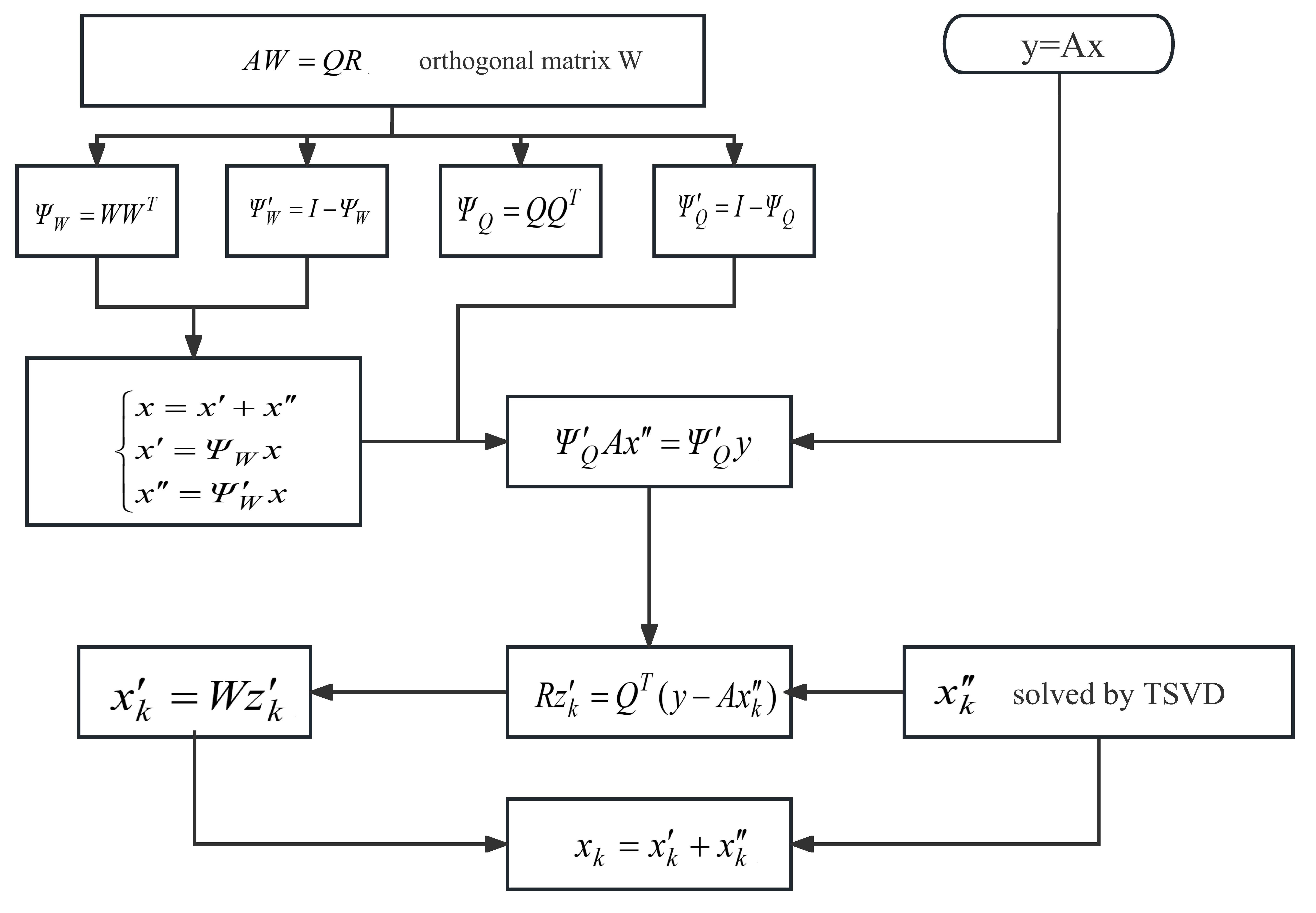
2.2. Tomographic Method
3. Results
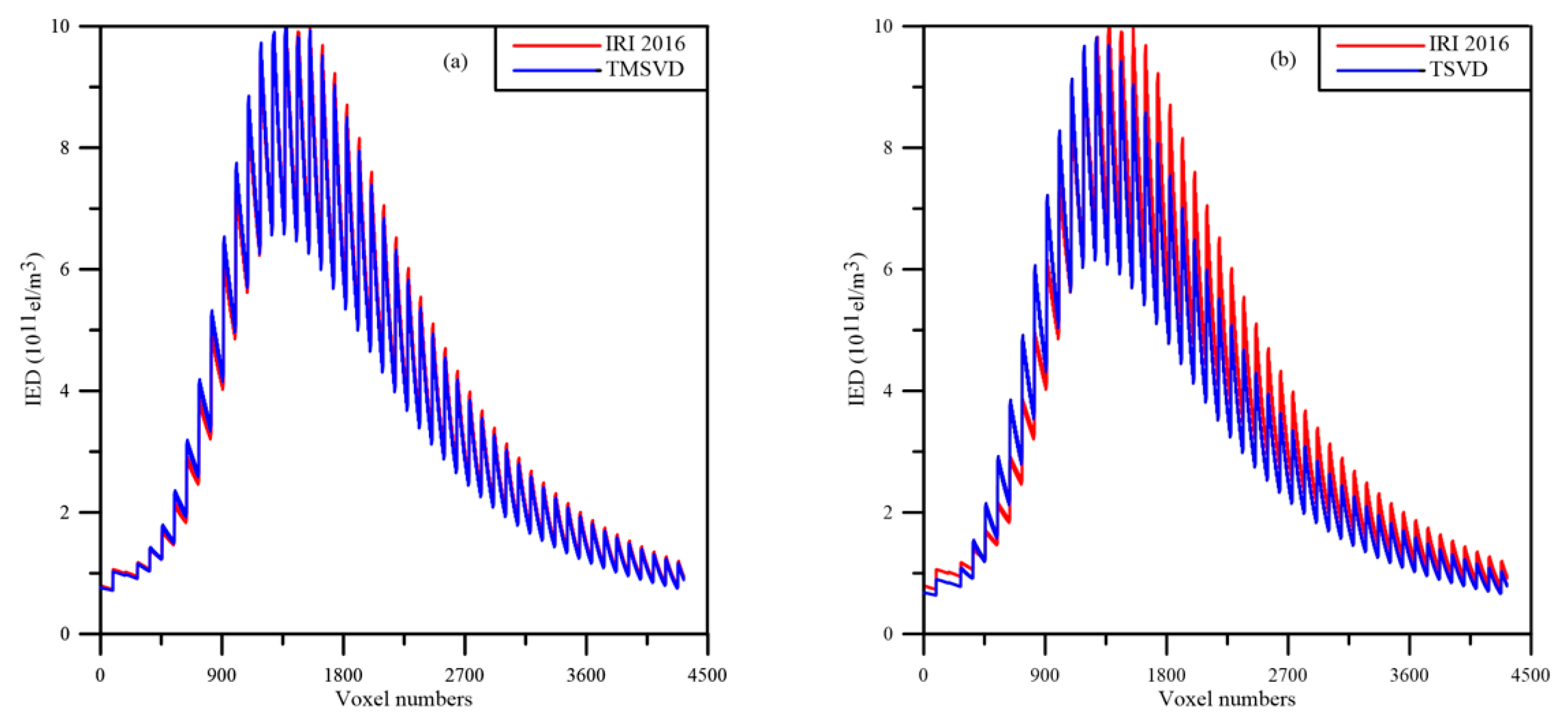
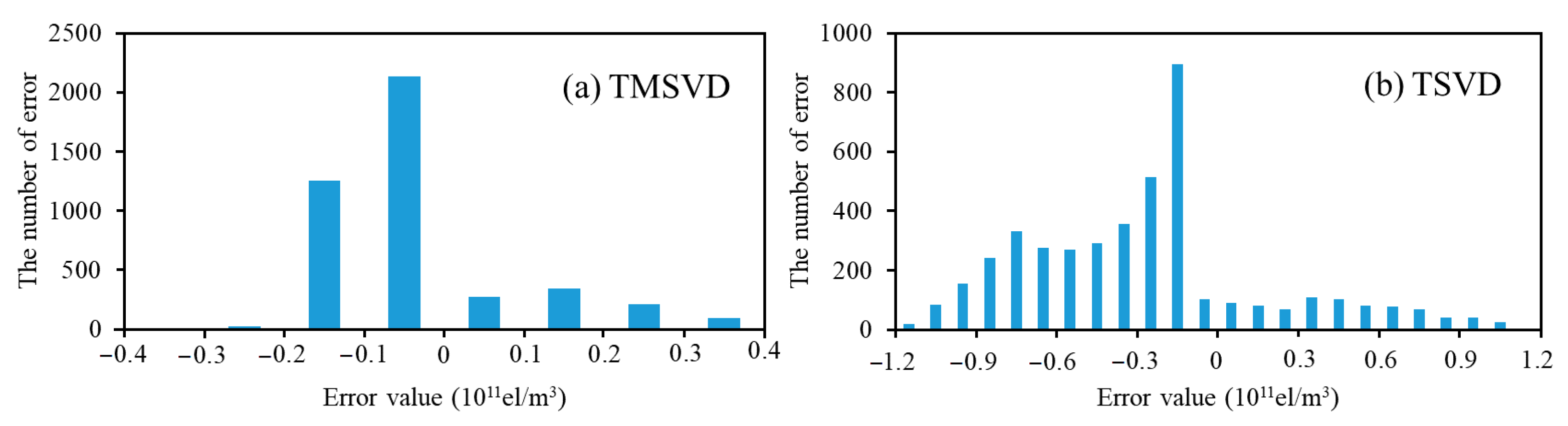
3.1. Numerical Simulation
3.2. Test of TMSVD Based on GNSS Data
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wen, D.; Mei, D.; Chen, H. Three-step tomographic algorithm for ionospheric electron density reconstruction. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5801408. [Google Scholar] [CrossRef]
- Samardjiev, T.; Bradley, P.A. Ionospheric mapping by computer contouring techniques. Electron. Lett. 1993, 29, 1794–1995. [Google Scholar] [CrossRef]
- Goodman, J.M. Operational communication systems and relationships to the ionosphere and space weather. Adv. Space Res. 2005, 36, 2241–2252. [Google Scholar] [CrossRef]
- Song, R.; Hattori, K.; Zhang, X.; Yoshino, C. The three-dimensional ionospheric electron density imaging in Japan using the approximate Kalman filter algorithm. J. Atmos. Sol.-Terr. Phy. 2021, 219, 105628. [Google Scholar] [CrossRef]
- Yao, Y.; Tan, J.; Kong, J.; Zhang, L.; Zhang, S. Application of hybrid regularization method for tomographic reconstruction of millatitude ionospheric electron density. Adv. Space Res. 2013, 12, 2215–2225. [Google Scholar] [CrossRef]
- Wen, D.; Mei, D. Ionospheric TEC disturbances over China during the strong geomagnetic storm in September 2017. Adv. Space Res. 2020, 65, 2529–2539. [Google Scholar] [CrossRef]
- Zheng, D.; Zheng, H.; Wang, Y.; Nie, W.; Li, C.; Ao, M.; Hu, W.; Zhou, W. Variable pixel size ionospheric tomography. Adv. Space Res. 2017, 59, 2969–2986. [Google Scholar] [CrossRef]
- Wen, D.; Mei, D.; Du, Y. Adaptive smoothness constraint ionospheric tomography algorithm. Sensors 2020, 20, 2404. [Google Scholar] [CrossRef]
- Chen, C.H.; Saito, A.; Lin, C.H.; Yamamoto, M.; Suzuki, S.; Seemala, G.K. Medium-scale traveling ionospheric disturbances by three-dimensional ionospheric GPS tomography. Earth Planets Space 2016, 68, 32. [Google Scholar] [CrossRef] [Green Version]
- Kong, J.; Li, F.; Yao, Y.; Wang, Z.; Peng, W.; Zhang, Q. Reconstruction of 2D/3D ionospheric disturbances in high-latitude and Arctic regions during a geomagnetic storm using GNSS carrier TEC: A case study of the 2015 great storm. J. Geodesy 2019, 93, 1529–1541. [Google Scholar] [CrossRef]
- Wen, D.; Mei, D.; Du, Y. Imaging the Three-Dimensional Ionospheric Structure with a Blob Basis Functional Ionospheric Tomography Model. Sensors 2020, 20, 2182. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kunitsyn, V.E.; Andreeva, E.S.; Razinkov, O.G. Possibilities of the near-space environment radio tomography. Radio Sci. 1997, 32, 1953–1963. [Google Scholar] [CrossRef]
- Li, H.; Yuan, Y.; Yan, W.; Li, Z. A constrained ionospheric tomography algorithm with smoothing method. Geomat. Inf. Sci. Wuhan Univ. 2013, 38, 412–415. [Google Scholar] [CrossRef]
- Hobiger, T.; Kondo, T.; Koyama, Y. Constrained simultaneous algebraic reconstruction technique (C-SART)—A new and simple algorithm applied to ionospheric tomography. Earth Planets Space 2008, 60, 727–735. [Google Scholar] [CrossRef] [Green Version]
- Chen, B.; Wu, L.; Dai, W.; Luo, X.; Xu, Y. A new parameterized approach for ionospheric tomography. GPS Solut. 2019, 23, 96. [Google Scholar] [CrossRef] [Green Version]
- Prol, F.S.; Camargo, P.O. Ionospheric tomography using GNSS: Multiplicative algebraic reconstruction technique applied to the area of Brazil. GPS Solut. 2016, 20, 807–814. [Google Scholar] [CrossRef] [Green Version]
- Hirooka, S.; Hattori, K.; Takeda, T. Numerical validations of neural-network based ionospheric tomography for disturbed ionospheric conditions and sparse data. Radio Sci. 2011, 46, 1–13. [Google Scholar] [CrossRef]
- Andreeva, E.S.; Kunitsyn, V.E.; Leonyeva, E.A.; Fedyunin, Y.N. The ionosphere over Alaska during a storm period in October 2003: Radio tomography and data obtained with GAIM/IFM ionospheric models. Mosc. Univ. Phys. Bull. 2009, 64, 84–88. [Google Scholar] [CrossRef]
- Liu, S.Z.; Wang, J.X.; Gao, J.Q. Inversion of ionospheric electron density based on a constrained simultaneous iteration reconstruction technique. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2455–2459. [Google Scholar] [CrossRef]
- Wen, D.B.; Liu, S.Z.; Tang, P.Y. Tomographic reconstruction of ionospheric electron density based on constrained algebraic reconstruction technique. GPS Solut. 2010, 14, 375–380. [Google Scholar] [CrossRef]
- Yao, Y.B.; Tang, J.; Chen, P.; Zhang, S.; Chen, J.J. An improved iterative algorithm for 3-D ionospheric tomography reconstruction. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4696–4706. [Google Scholar] [CrossRef]
- Zheng, D.Y.; Yao, Y.B.; Nie, W.F.; Yang, W.T.; Hu, W.S.; Ao, M.S.; Zheng, H.W. An improved iterative algorithm for ionospheric tomography by using the automatic search technology of relaxation factor. Radio Sci. 2018, 53, 1051–1066. [Google Scholar] [CrossRef] [Green Version]
- Ou, M.; Zhen, W.; Yu, X.; Xu, J.; Deng, Z. A computerized ionospheric tomography algorithm based on TSVD regularization. Chin. J. Radio Sci. 2014, 29, 345–352. [Google Scholar]
- Dymond, K.F.; Budzien, S.A.; Hei, M.A. Ionospheric thermospheric UV tomography: 1. Image space reconstruction algorithms. Radio Sci. 2017, 52, 338–356. [Google Scholar] [CrossRef]
- Razin, M. Ionospheric electron density reconstruction using TSVD methods over Iran. Curr. Sci. 2010, 79, 1547–1556. [Google Scholar]
- Raymund, T.D. Comparison of several ionospheric tomography algorithms. Ann. Geophys. 1994, 13, 1254–1262. [Google Scholar] [CrossRef]
- Bhuyan, K.; Bhuyan, P.K. International reference ionosphere as a potential regularization profile for computerized ionospheric tomography. Adv. Space Res. 2007, 39, 851–858. [Google Scholar] [CrossRef]
- Hansen, P.C.; Sekii, T.; Shibahashi, H. The modified truncated SVD method for regularization in general form. SIAM J. Sci. Stat. Comput. 1992, 13, 1142–1150. [Google Scholar] [CrossRef]
- Bhuyan, K.; Singh, S.B.; Bhuyan, P.K. Tomogrpahic reconstruction of the ionosphere using generalized singular value decomposition. J. Geog. Infor. Techn. 2002, 83, 1117–1120. [Google Scholar]
- Austen, J.R.; Franke, S.J.; Liu, C.H. Ionospheric imagingusing computerized tomography. Radio Sci. 1988, 23, 299–307. [Google Scholar] [CrossRef]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wen, D.; Xie, K.; Tang, Y.; Mei, D.; Chen, X.; Chen, H. A New Algorithm for Ill-Posed Problem of GNSS-Based Ionospheric Tomography. Remote Sens. 2023, 15, 1930. https://doi.org/10.3390/rs15071930
Wen D, Xie K, Tang Y, Mei D, Chen X, Chen H. A New Algorithm for Ill-Posed Problem of GNSS-Based Ionospheric Tomography. Remote Sensing. 2023; 15(7):1930. https://doi.org/10.3390/rs15071930
Chicago/Turabian StyleWen, Debao, Kangyou Xie, Yinghao Tang, Dengkui Mei, Xi Chen, and Hanqing Chen. 2023. "A New Algorithm for Ill-Posed Problem of GNSS-Based Ionospheric Tomography" Remote Sensing 15, no. 7: 1930. https://doi.org/10.3390/rs15071930