
UAV Photogrammetry in Intertidal Mudflats: Accuracy, Efficiency, and Potential for Integration with Satellite Imagery



Abstract
:
1. Introduction
- (1)
- The impact of UAV flight pattern, altitude, and image overlap on the accuracy of intertidal topographic observations without ground control points was quantitatively assessed. This provides scientific guidelines for the balance between the accuracy and efficiency of UAV-based intertidal monitoring;
- (2)
- The errors caused by the water-bearing layer in low-lying mudflats were estimated and elevation corrections for the water-bearing areas were inferred from field measurements, thus ensuring the accuracy of topographic change monitoring in the mudflats;
- (3)
- Given the limited spatial scale of UAV mapping, the potential for combining UAV and satellite observations of mudflat topography was explored to take advantage of the high spatial and temporal accuracy of UAVs and the large spatial coverage of satellite sensor imagery.
2. Materials and Methods
2.1. Study Area
2.2. Data and Methods
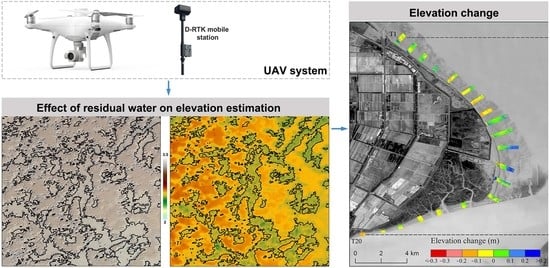
2.2.1. UAV Systems
2.2.2. Photogrammetric Experiments and Image Processing
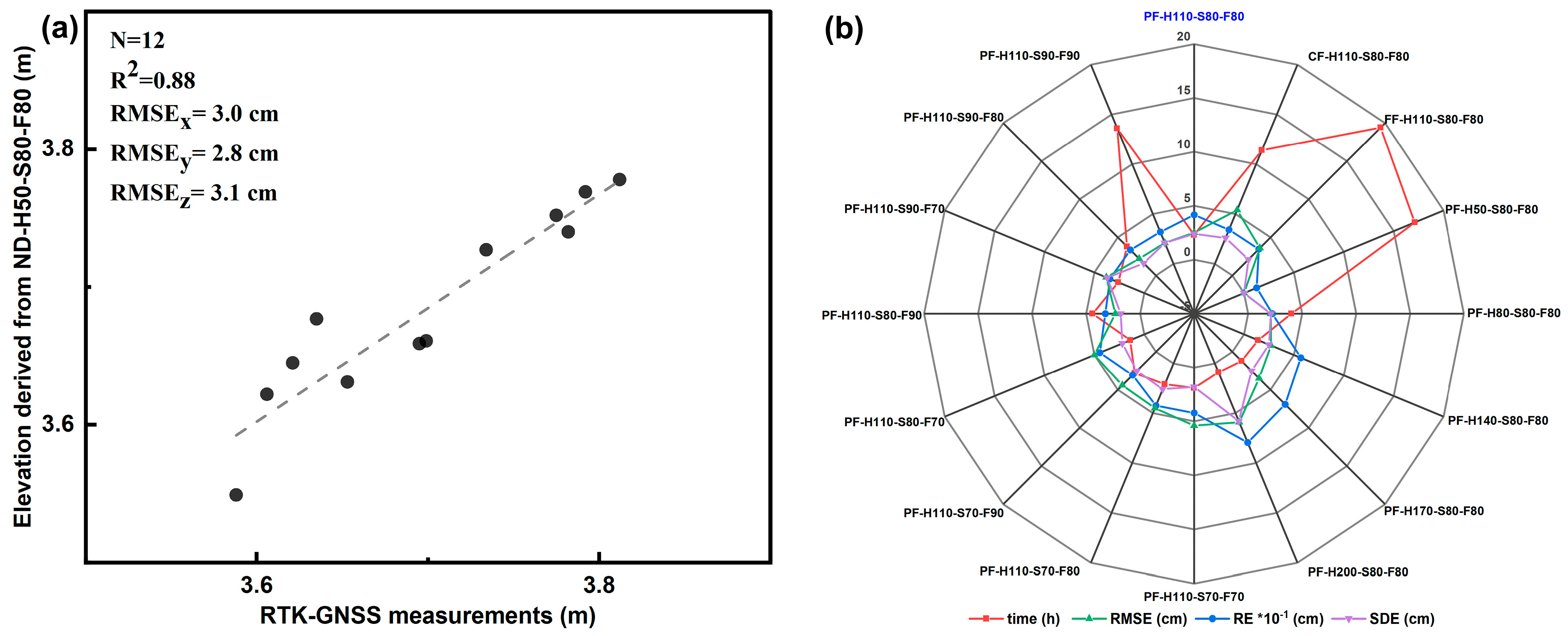
2.2.3. Accuracy Assessment and Comparisons
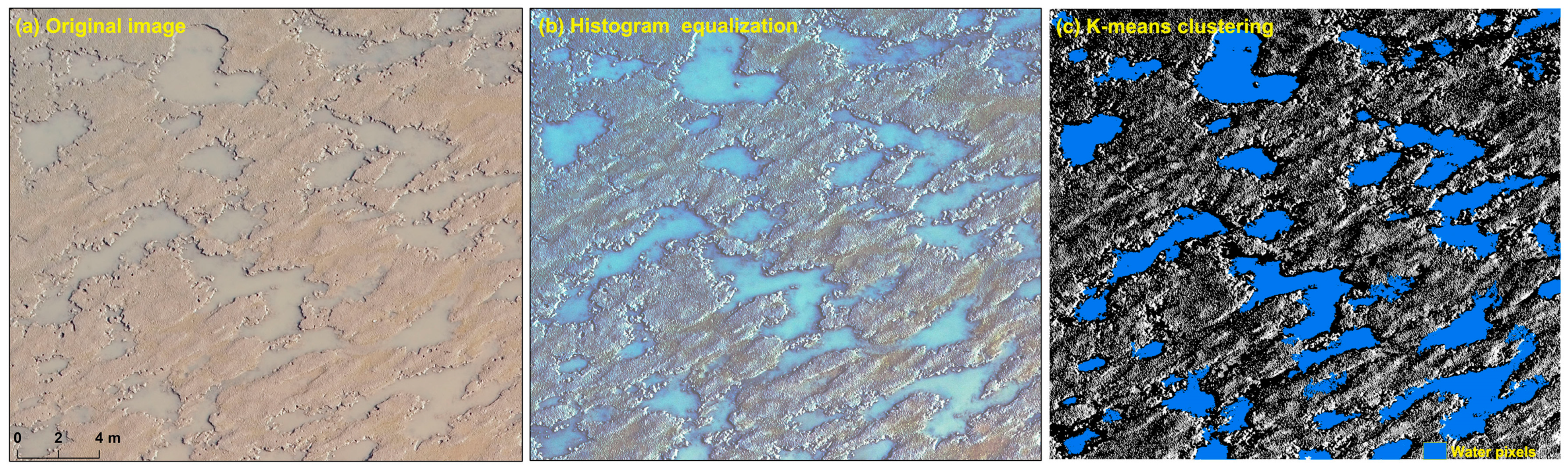
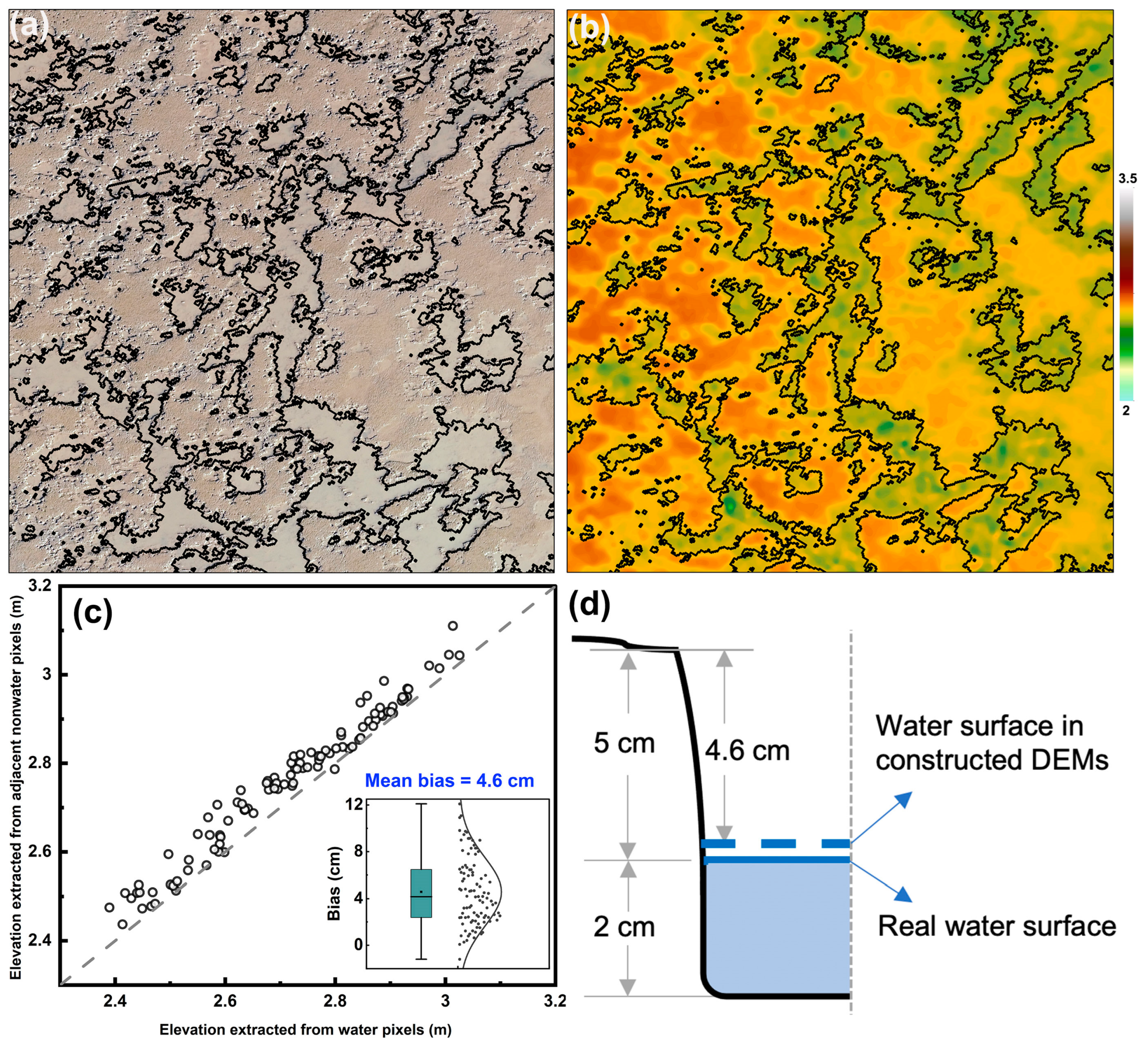
2.2.4. Identification of Surface Water Layer
2.2.5. Elevation Determination of Satellite-Based Waterlines from Photogrammetric DEMs
3. Results
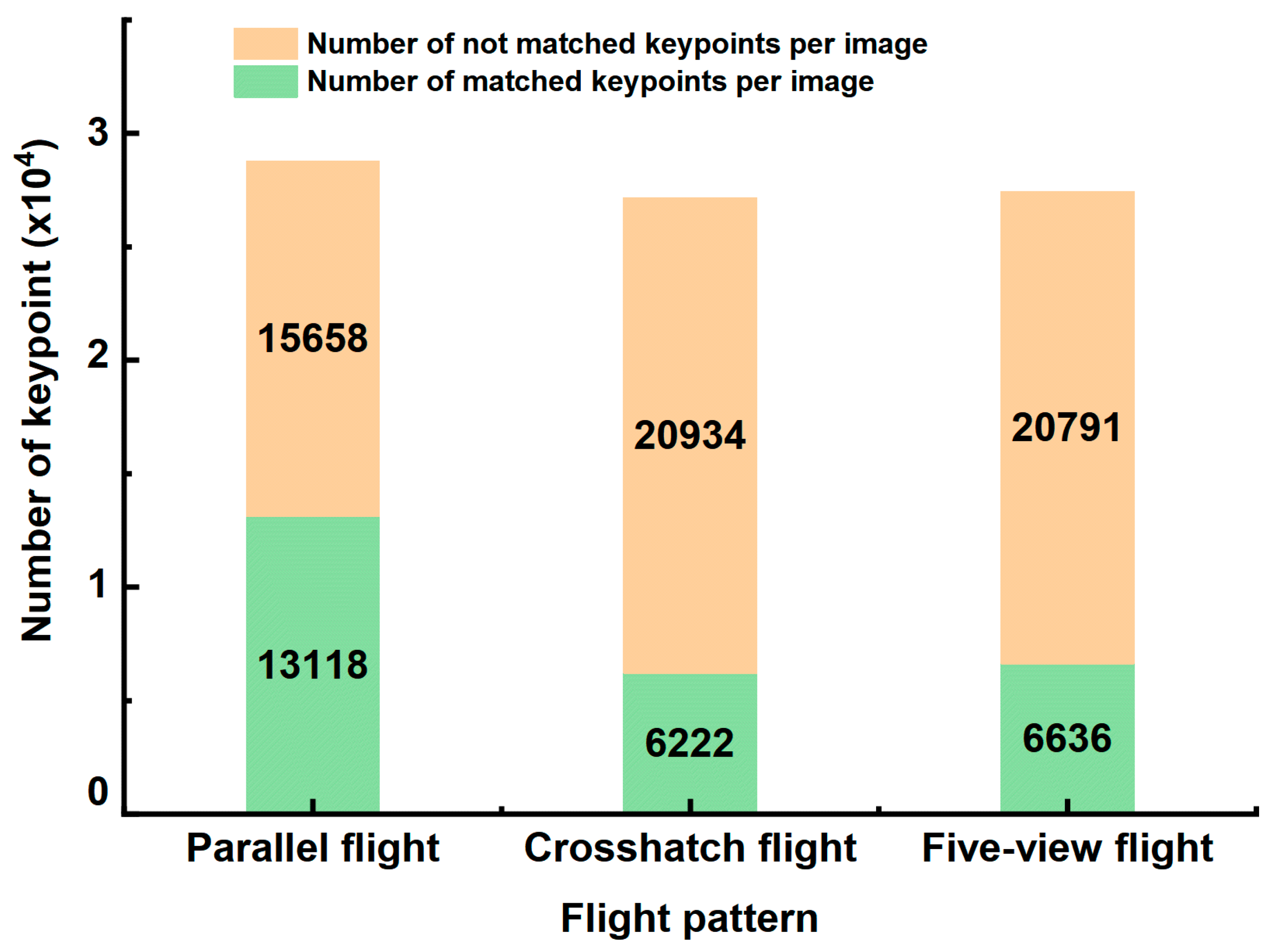
3.1. Comparison of Different Photogrammetric Results
3.2. The Impact of Surface Water Layer on UAV-Based DEM
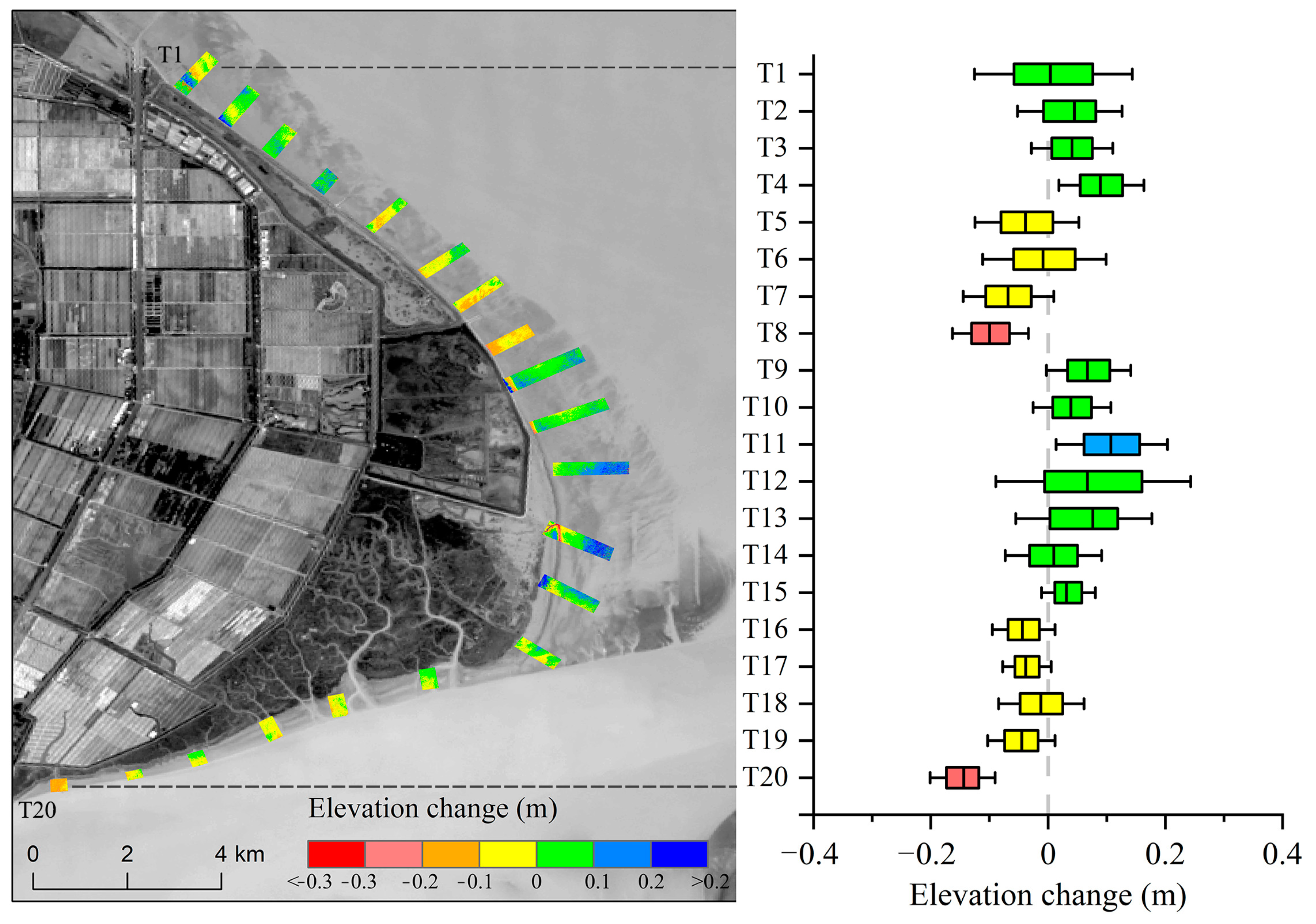
3.3. The Pattern of Accretion/Erosion in Chongming Dongtan
3.4. Accuracy Comparison of Tide-Adjusted DEM and the UAV-Adjusted DEM
4. Discussion
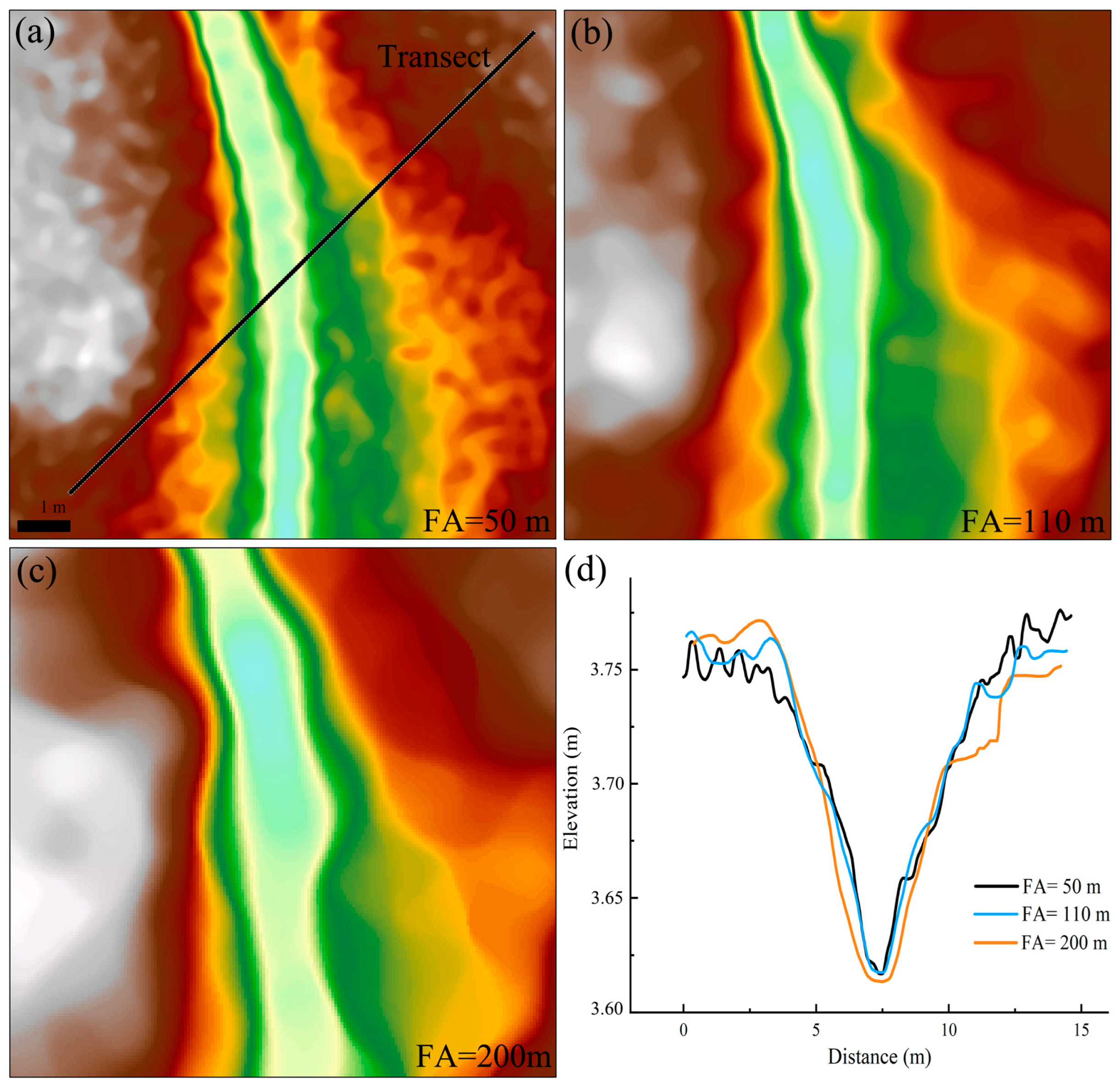
4.1. Uncertainty Caused by Photogrammetric Configurations
4.2. The Potential and Challenges of UAV/Satellite Synergy
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Arkema, K.K.; Guannel, G.; Verutes, G.; Wood, S.A.; Guerry, A.; Ruckelshaus, M.; Kareiva, P.; Lacayo, M.; Silver, J.M. Coastal habitats shield people and property from sea-level rise and storms. Nat. Clim. Chang. 2013, 3, 913–918. [Google Scholar] [CrossRef]
- Murray, N.J.; Ma, Z.J.; Fuller, R.A. Tidal flats of the Yellow Sea: A review of ecosystem status and anthropogenic threats. Austral. Ecol. 2015, 40, 472–481. [Google Scholar] [CrossRef]
- Temmerman, S.; Meire, P.; Bouma, T.J.; Herman, P.M.; Ysebaert, T.; De Vriend, H.J. Ecosystem-based coastal defence in the face of global change. Nature 2013, 504, 79–83. [Google Scholar] [CrossRef] [PubMed]
- Xie, W.; He, Q.; Zhang, K.; Guo, L.; Wang, X.; Shen, J. Impacts of human modifications and natural variations on short-term morphological changes in estuarine tidal flats. Estuar. Coast. 2018, 41, 1253–1267. [Google Scholar] [CrossRef]
- Mariotti, G.; Fagherazzi, S. A numerical model for the coupled long-term evolution of salt marshes and tidal flats. J. Geophys. Res. Earth Surf. 2010, 115, F01004. [Google Scholar] [CrossRef]
- Xie, W.; He, Q.; Zhang, K.; Guo, L.; Wang, X.; Shen, J.; Cui, Z. Application of terrestrial laser scanner on tidal flat morphology at a typhoon event timescale. Geomorphology 2017, 292, 47–58. [Google Scholar] [CrossRef]
- Mariotti, G.; Fagherazzi, S.; Wiberg, P.; McGlathery, K.; Carniello, L.; Defina, A. Influence of storm surges and sea level on shallow tidal basin erosive processes. J. Geophys. Res. Oceans 2010, 115, F01004. [Google Scholar] [CrossRef]
- Hladik, C.; Alber, M. Accuracy assessment and correction of a LIDAR-derived salt marsh digital elevation model. Remote Sens. Environ. 2012, 121, 224–235. [Google Scholar] [CrossRef]
- Morris, R.L.; Konlechner, T.M.; Ghisalberti, M.; Swearer, S.E. From grey to green: Efficacy of eco-engineering solutions for nature-based coastal defence. Glob. Chang. Biol. 2018, 24, 1827–1842. [Google Scholar] [CrossRef]
- Van Coppenolle, R.; Temmerman, S. Identifying global hotspots where coastal wetland conservation can contribute to nature-based mitigation of coastal flood risks. Glob. Planet. Change 2020, 187, 103125. [Google Scholar] [CrossRef]
- Hu, Z.; Van Belzen, J.; Van Der Wal, D.; Balke, T.; Wang, Z.B.; Stive, M.; Bouma, T.J. Windows of opportunity for salt marsh vegetation establishment on bare tidal flats: The importance of temporal and spatial variability in hydrodynamic forcing. J. Geophys. Res. Biogeosci. 2015, 120, 1450–1469. [Google Scholar] [CrossRef]
- Balke, T.; Stock, M.; Jensen, K.; Bouma, T.J.; Kleyer, M. A global analysis of the seaward salt marsh extent: The importance of tidal range. Water Resour. Res. 2016, 52, 3775–3786. [Google Scholar] [CrossRef]
- Kirwan, M.L.; Temmerman, S.; Skeehan, E.E.; Guntenspergen, G.R.; Fagherazzi, S. Overestimation of marsh vulnerability to sea level rise. Nat. Clim. Chang. 2016, 6, 253–260. [Google Scholar] [CrossRef]
- Kirwan, M.L.; Megonigal, J.P. Tidal wetland stability in the face of human impacts and sea-level rise. Nature 2013, 504, 53–60. [Google Scholar] [CrossRef]
- Schuerch, M.; Spencer, T.; Temmerman, S.; Kirwan, M.L.; Wolff, C.; Lincke, D.; McOwen, C.J.; Pickering, M.D.; Reef, R.; Vafeidis, A.T. Future response of global coastal wetlands to sea-level rise. Nature 2018, 561, 231–234. [Google Scholar] [CrossRef]
- Van Regteren, M.; Meesters, E.; Baptist, M.; De Groot, A.; Bouma, T.; Elschot, K. Multiple environmental variables affect germination and mortality of an annual salt marsh pioneer: Salicornia procumbens. Estuar. Coast. 2020, 43, 1489–1501. [Google Scholar] [CrossRef]
- Tan, K.; Chen, J.; Zhang, W.; Liu, K.; Tao, P.; Cheng, X. Estimation of soil surface water contents for intertidal mudflats using a near-infrared long-range terrestrial laser scanner. ISPRS J. Photogramm. Remote Sens. 2020, 159, 129–139. [Google Scholar] [CrossRef]
- Besterman, A.F.; McGlathery, K.J.; Reidenbach, M.A.; Wiberg, P.L.; Pace, M.L. Predicting benthic macroalgal abundance in shallow coastal lagoons from geomorphology and hydrologic flow patterns. Limnol. Oceanogr. 2021, 66, 123–140. [Google Scholar] [CrossRef]
- Kalacska, M.; Chmura, G.L.; Lucanus, O.; Bérubé, D.; Arroyo-Mora, J.P. Structure from motion will revolutionize analyses of tidal wetland landscapes. Remote Sens. Environ. 2017, 199, 14–24. [Google Scholar] [CrossRef]
- Turner, I.L.; Harley, M.D.; Drummond, C.D. UAVs for coastal surveying. Coast. Eng. 2016, 114, 19–24. [Google Scholar] [CrossRef]
- Tong, S.S.; Deroin, J.P.; Pham, T.L. An optimal waterline approach for studying tidal flat morphological changes using remote sensing data: A case of the northern coast of Vietnam. Estuar. Coast. Shelf. Sci. 2020, 236, 106613. [Google Scholar] [CrossRef]
- Kang, Y.; Ding, X.; Xu, F.; Zhang, C.; Ge, X. Topographic mapping on large-scale tidal flats with an iterative approach on the waterline method. Estuar. Coast. Shelf. Sci. 2017, 190, 11–22. [Google Scholar] [CrossRef]
- Xu, Z.; Kim, D.-j.; Kim, S.H.; Cho, Y.-K.; Lee, S.-G. Estimation of seasonal topographic variation in tidal flats using waterline method: A case study in Gomso and Hampyeong Bay, South Korea. Estuar. Coast. Shelf. Sci. 2016, 183, 213–220. [Google Scholar] [CrossRef]
- Uunk, L.; Wijnberg, K.M.; Morelissen, R. Automated mapping of the intertidal beach bathymetry from video images. Coast. Eng. 2010, 57, 461–469. [Google Scholar] [CrossRef]
- Harley, M.D.; Turner, I.L.; Short, A.D.; Ranasinghe, R. Assessment and integration of conventional, RTK-GPS and image-derived beach survey methods for daily to decadal coastal monitoring. Coast. Eng. 2011, 58, 194–205. [Google Scholar] [CrossRef]
- Zhan, Y.J.; Aarninkhof, S.G.J.; Wang, Z.B.; Qian, W.W.; Zhou, Y.X. Daily Topographic Change Patterns of Tidal Flats in Response to Anthropogenic Activities: Analysis through Coastal Video Imagery. J. Coast. Res. 2020, 36, 103–115. [Google Scholar] [CrossRef]
- Huff, T.P.; Feagin, R.A.; Delgado, A. Understanding Lateral Marsh Edge Erosion with Terrestrial Laser Scanning (TLS). Remote Sens. 2019, 11, 2208. [Google Scholar] [CrossRef]
- Bertels, L.; Houthuys, R.; Sterckx, S.; Knaeps, E.; Deronde, B. Large-scale mapping of the riverbanks, mud flats and salt marshes of the Scheldt basin, using airborne imaging spectroscopy and LiDAR. Int. J. Remote Sens. 2011, 32, 2905–2918. [Google Scholar] [CrossRef]
- Liu, Y.; Zhou, M.; Zhao, S.; Zhan, W.; Yang, K.; Li, M. Automated extraction of tidal creeks from airborne laser altimetry data. J. Hydrol. 2015, 527, 1006–1020. [Google Scholar] [CrossRef]
- Tao, P.; Tan, K.; Ke, T.; Liu, S.; Zhang, W.; Yang, J.; Zhu, X. Recognition of ecological vegetation fairy circles in intertidal salt marshes from UAV LiDAR point clouds. Int. J. Appl. Earth Obs. 2022, 114, 103029. [Google Scholar] [CrossRef]
- Chen, C.; Zhang, C.; Schwarz, C.; Tian, B.; Jiang, W.; Wu, W.; Garg, R.; Garg, P.; Aleksandr, C.; Mikhail, S. Mapping three-dimensional morphological characteristics of tidal salt-marsh channels using UAV structure-from-motion photogrammetry. Geomorphology 2022, 407, 108235. [Google Scholar] [CrossRef]
- Brunier, G.; Michaud, E.; Fleury, J.; Anthony, E.J.; Morvan, S.; Gardel, A. Assessing the relationship between macro-faunal burrowing activity and mudflat geomorphology from UAV-based Structure-from-Motion photogrammetry. Remote Sens. Environ. 2020, 241, 111717. [Google Scholar] [CrossRef]
- Muzirafuti, A.; Cascio, M.; Lanza, S.; Randazzo, G. UAV Photogrammetry-based Mapping of the Pocket Beaches of Isola Bella Bay, Taormina (Eastern Sicily). In Proceedings of the 2021 International Workshop on Metrology for the Sea, Learning to Measure Sea Health Parameters (MetroSea), Reggio Calabria, Italy, 4–6 October 2021; pp. 418–422. [Google Scholar]
- Beselly, S.M.; van der Wegen, M.; Grueters, U.; Reyns, J.; Dijkstra, J.; Roelvink, D. Eleven years of mangrove–Mudflat dynamics on the mud volcano-induced prograding delta in East Java, Indonesia: Integrating UAV and satellite imagery. Remote Sens. 2021, 13, 1084. [Google Scholar] [CrossRef]
- Brunier, G.; Fleury, J.; Anthony, E.J.; Gardel, A.; Dussouillez, P. Close-range airborne Structure-from-Motion Photogrammetry for high-resolution beach morphometric surveys: Examples from an embayed rotating beach. Geomorphology 2016, 261, 76–88. [Google Scholar] [CrossRef]
- Tong, X.; Liu, X.; Chen, P.; Liu, S.; Luan, K.; Li, L.; Liu, S.; Liu, X.; Xie, H.; Jin, Y.; et al. Integration of UAV-Based Photogrammetry and Terrestrial Laser Scanning for the Three-Dimensional Mapping and Monitoring of Open-Pit Mine Areas. Remote Sens. 2015, 7, 6635–6662. [Google Scholar] [CrossRef]
- Martínez-Carricondo, P.; Agüera-Vega, F.; Carvajal-Ramírez, F.; Mesas-Carrascosa, F.-J.; García-Ferrer, A.; Pérez-Porras, F.-J. Assessment of UAV-photogrammetric mapping accuracy based on variation of ground control points. Int. J. Appl. Earth Obs. 2018, 72, 1–10. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S.; d’Oleire-Oltmanns, S.; Niethammer, U. Optimising UAV topographic surveys processed with structure-from-motion: Ground control quality, quantity and bundle adjustment. Geomorphology 2017, 280, 51–66. [Google Scholar] [CrossRef]
- Jaud, M.; Bertin, S.; Beauverger, M.; Augereau, E.; Delacourt, C. RTK GNSS-Assisted Terrestrial SfM Photogrammetry without GCP: Application to Coastal Morphodynamics Monitoring. Remote Sens. 2020, 12, 1889. [Google Scholar] [CrossRef]
- Zhang, H.; Aldana-Jague, E.; Clapuyt, F.; Wilken, F.; Vanacker, V.; Van Oost, K. Evaluating the potential of post-processing kinematic (PPK) georeferencing for UAV-based structure-from-motion (SfM) photogrammetry and surface change detection. Earth Surf. Dyn. 2019, 7, 807–827. [Google Scholar] [CrossRef]
- Forlani, G.; Dall’Asta, E.; Diotri, F.; Morra di Cella, U.; Roncella, R.; Santise, M. Quality assessment of DSMs produced from UAV flights georeferenced with on-board RTK positioning. Remote Sens. 2018, 10, 311. [Google Scholar] [CrossRef]
- Benassi, F.; Dall’Asta, E.; Diotri, F.; Forlani, G.; Morra di Cella, U.; Roncella, R.; Santise, M. Testing accuracy and repeatability of UAV blocks oriented with GNSS-supported aerial triangulation. Remote Sens. 2017, 9, 172. [Google Scholar] [CrossRef]
- Štroner, M.; Urban, R.; Seidl, J.; Reindl, T.; Brouček, J. Photogrammetry using UAV-mounted GNSS RTK: Georeferencing strategies without GCPs. Remote Sens. 2021, 13, 1336. [Google Scholar] [CrossRef]
- Zhang, J.; Xu, S.; Zhao, Y.; Sun, J.; Xu, S.; Zhang, X. Aerial orthoimage generation for UAV remote sensing. Inf. Fusion 2023, 89, 91–120. [Google Scholar] [CrossRef]
- Li, X.; Zhou, Y.X.; Zhang, L.P.; Kuang, R.Y. Shoreline change of Chongming Dongtan and response to river sediment load: A remote sensing assessment. J. Hydrol. 2014, 511, 432–442. [Google Scholar] [CrossRef]
- James, M.R.; Chandler, J.H.; Eltner, A.; Fraser, C.; Miller, P.E.; Mills, J.P.; Noble, T.; Robson, S.; Lane, S.N. Guidelines on the use of structure-from-motion photogrammetry in geomorphic research. Earth. Surf. Proc. Land. 2019, 44, 2081–2084. [Google Scholar] [CrossRef]
- Ekaso, D.; Nex, F.; Kerle, N. Accuracy assessment of real-time kinematics (RTK) measurements on unmanned aerial vehicles (UAV) for direct geo-referencing. Geo. Spat. Inf. Sci. 2020, 23, 165–181. [Google Scholar] [CrossRef]
- Liu, J.; Xu, W.; Guo, B.; Zhou, G.; Zhu, H. Accurate mapping method for UAV photogrammetry without ground control points in the map projection frame. IEEE Trans. Geosci. Remote Sens. 2021, 59, 9673–9681. [Google Scholar] [CrossRef]
- Jiang, S.; Jiang, C.; Jiang, W. Efficient structure from motion for large-scale UAV images: A review and a comparison of SfM tools. ISPRS J. Photogramm. Remote Sens. 2020, 167, 230–251. [Google Scholar] [CrossRef]
- Smith, M.W.; Vericat, D. From experimental plots to experimental landscapes: Topography, erosion and deposition in sub-humid badlands from structure-from-motion photogrammetry. Earth. Surf. Proc. Landf. 2015, 40, 1656–1671. [Google Scholar] [CrossRef]
- Lei, L.; Yin, T.; Chai, G.; Li, Y.; Wang, Y.; Jia, X.; Zhang, X. A novel algorithm of individual tree crowns segmentation considering three-dimensional canopy attributes using UAV oblique photos. Int. J. Appl. Earth Obs. 2022, 112, 102893. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Bell, P.S.; Bird, C.O.; Plater, A.J. A temporal waterline approach to mapping intertidal areas using X-band marine radar. Coast. Eng. 2016, 107, 84–101. [Google Scholar] [CrossRef]
- Bishop-Taylor, R.; Sagar, S.; Lymburner, L.; Beaman, R.J. Between the tides: Modelling the elevation of Australia’s exposed intertidal zone at continental scale. Estuar. Coast. Shelf. S. 2019, 223, 115–128. [Google Scholar] [CrossRef]
- Salameh, E.; Frappart, F.; Turki, I.; Laignel, B. Intertidal topography mapping using the waterline method from Sentinel-1 &-2 images: The examples of Arcachon and Veys Bays in France. ISPRS J. Photogramm. Remote Sens. 2020, 163, 98–120. [Google Scholar]
- Wang, Y.; Liu, Y.; Jin, S.; Sun, C.; Wei, X. Evolution of the topography of tidal flats and sandbanks along the Jiangsu coast from 1973 to 2016 observed from satellites. ISPRS J. Photogramm. Remote Sens. 2019, 150, 27–43. [Google Scholar] [CrossRef]
- Kleptsova, O.; Pietrzak, J. High resolution tidal model of Canadian Arctic Archipelago, Baffin and Hudson Bay. Ocean Model. 2018, 128, 15–47. [Google Scholar] [CrossRef]
- Seifi, F.; Deng, X.; Baltazar Andersen, O. Assessment of the accuracy of recent empirical and assimilated tidal models for the Great Barrier Reef, Australia, using satellite and coastal data. Remote Sens. 2019, 11, 1211. [Google Scholar] [CrossRef]
- de Vries, J.; van Maanen, B.; Ruessink, G.; Verweij, P.A.; de Jong, S.M. Unmixing water and mud: Characterizing diffuse boundaries of subtidal mud banks from individual satellite observations. Int. J. Appl. Earth Obs. 2021, 95, 102252. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technical Method | Spatial Resolution | Data Accuracy | Spatial Coverage | Repeatability | Limitations | Case References |
|---|---|---|---|---|---|---|
| Satellite-based waterline | ~30 m, depending on intervals of the waterline. | V: ~0.5 m; H: ~30 m | Large scale | Quarterly | Low accuracy; coarse temporal-spatial resolution; rely on good satellite observation. | [21,22,23] |
| Video-based monitoring | ~5 m, depending on intervals of the waterline. | V: ~0.5 m; H: ~5 m | ~1 km2 of each camera | Daily | Low accuracy; cameras need to be installed at a high field of view. | [24,25,26] |
| Terrestrial LiDAR | ~0.5 m, depending on the sensor parameter. | V: ~4 cm; H: ~4 cm | ~1 km2 of each station | Flexible | Costly; difficult to install in a muddy environment; few points are collected from sites where residual standing water remains. | [6,27] |
| Airborne LiDAR | ~0.5 m, depending on the sensor parameter. | V: ~13 cm; H: ~10 cm | Large scale | Flexible | Costly; few points are collected from sites where residual standing water remains. | [28,29,30] |
| UAV-based structure from motion | ~3 cm, depending on flight altitude and sensor parameter. | V: ~4 cm; H: ~3 cm | ~0.5 km2 of each battery | Flexible | Data acquisition cannot be performed on rainy days. | [19,31,32] |
| Experiments | Flight Pattern | Altitude (m) | Side Overlap | Frontal Overlap | GSD (cm) | Number of Photographs |
|---|---|---|---|---|---|---|
| PF-H110-S80-F80 | Parallel | 110 | 80% | 80% | 3.1 | 444 |
| CF-H110-S80-F80 | Crosshatch | 110 | 80% | 80% | 3.8 | 1073 |
| FF-H110-S80-F80 | Five-view | 110 | 80% | 80% | 3.6 | 2551 |
| PF-H50-S80-F80 | Parallel | 50 | 80% | 80% | 1.3 | 2082 |
| PF-H80-S80-F80 | Parallel | 80 | 80% | 80% | 2.2 | 792 |
| PF-H140-S80-F80 | Parallel | 140 | 80% | 80% | 4.0 | 286 |
| PF-H170-S80-F80 | Parallel | 170 | 80% | 80% | 4.9 | 226 |
| PF-H200-S80-F80 | Parallel | 200 | 80% | 80% | 5.8 | 166 |
| PF-H110-S70-F70 | Parallel | 110 | 70% | 70% | 3.1 | 239 |
| PF-H110-S70-F80 | Parallel | 110 | 70% | 80% | 3.1 | 354 |
| PF-H110-S70-F90 | Parallel | 110 | 70% | 90% | 3.1 | 676 |
| PF-H110-S80-F70 | Parallel | 110 | 80% | 70% | 3.1 | 279 |
| PF-H110-S80-F90 | Parallel | 110 | 80% | 90% | 3.1 | 847 |
| PF-H110-S90-F70 | Parallel | 110 | 90% | 70% | 3.1 | 504 |
| PF-H110-S90-F80 | Parallel | 110 | 90% | 80% | 3.1 | 738 |
| PF-H110-S90-F90 | Parallel | 110 | 90% | 90% | 3.1 | 1407 |
| Experiments | RE (pixel/cm) | RMSE (cm) | SDE (cm) | Experiments | RE (pixel/cm) | RMSE (cm) | SDE (cm) |
|---|---|---|---|---|---|---|---|
| PF-H110-S80-F80 | 0.134/0.415 | 2.5 | 2.4 | PF-H110-S70-F70 | 0.136/0.422 | 5.4 | 1.8 |
| CF-H110-S80-F80 | 0.090/0.342 | 5.4 | 2.6 | PF-H110-S70-F80 | 0.137/0.425 | 4.5 | 2.6 |
| FF-H110-S80-F80 | 0.096/0.346 | 3.6 | 2.4 | PF-H110-S70-F90 | 0.099/0.307 | 4.4 | 2.5 |
| PF-H50-S80-F80 | 0.097/0.126 | / | / | PF-H110-S80-F70 | 0.144/0.446 | 5.0 | 2.2 |
| PF-H80-S80-F80 | 0.101/0.224 | 2.1 | 2.1 | PF-H110-S80-F90 | 0.104/0.322 | 2.3 | 1.8 |
| PF-H140-S80-F80 | 0.142/0.568 | 2.7 | 2.5 | PF-H110-S90-F70 | 0.111/0.344 | 3.8 | 3.7 |
| PF-H170-S80-F80 | 0.141/0.691 | 3.5 | 2.5 | PF-H110-S90-F80 | 0.108/0.335 | 2.2 | 1.6 |
| PF-H200-S80-F80 | 0.137/0.795 | 5.9 | 5.8 | PF-H110-S90-F90 | 0.103/0.319 | 2.1 | 2.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, C.; Tian, B.; Wu, W.; Duan, Y.; Zhou, Y.; Zhang, C. UAV Photogrammetry in Intertidal Mudflats: Accuracy, Efficiency, and Potential for Integration with Satellite Imagery. Remote Sens. 2023, 15, 1814. https://doi.org/10.3390/rs15071814
Chen C, Tian B, Wu W, Duan Y, Zhou Y, Zhang C. UAV Photogrammetry in Intertidal Mudflats: Accuracy, Efficiency, and Potential for Integration with Satellite Imagery. Remote Sensing. 2023; 15(7):1814. https://doi.org/10.3390/rs15071814
Chicago/Turabian StyleChen, Chunpeng, Bo Tian, Wenting Wu, Yuanqiang Duan, Yunxuan Zhou, and Ce Zhang. 2023. "UAV Photogrammetry in Intertidal Mudflats: Accuracy, Efficiency, and Potential for Integration with Satellite Imagery" Remote Sensing 15, no. 7: 1814. https://doi.org/10.3390/rs15071814