

Deep Learning for Improved Subsurface Imaging: Enhancing GPR Clutter Removal Performance Using Contextual Feature Fusion and Enhanced Spatial Attention

Abstract
:1. Introduction
2. Materials and Methods
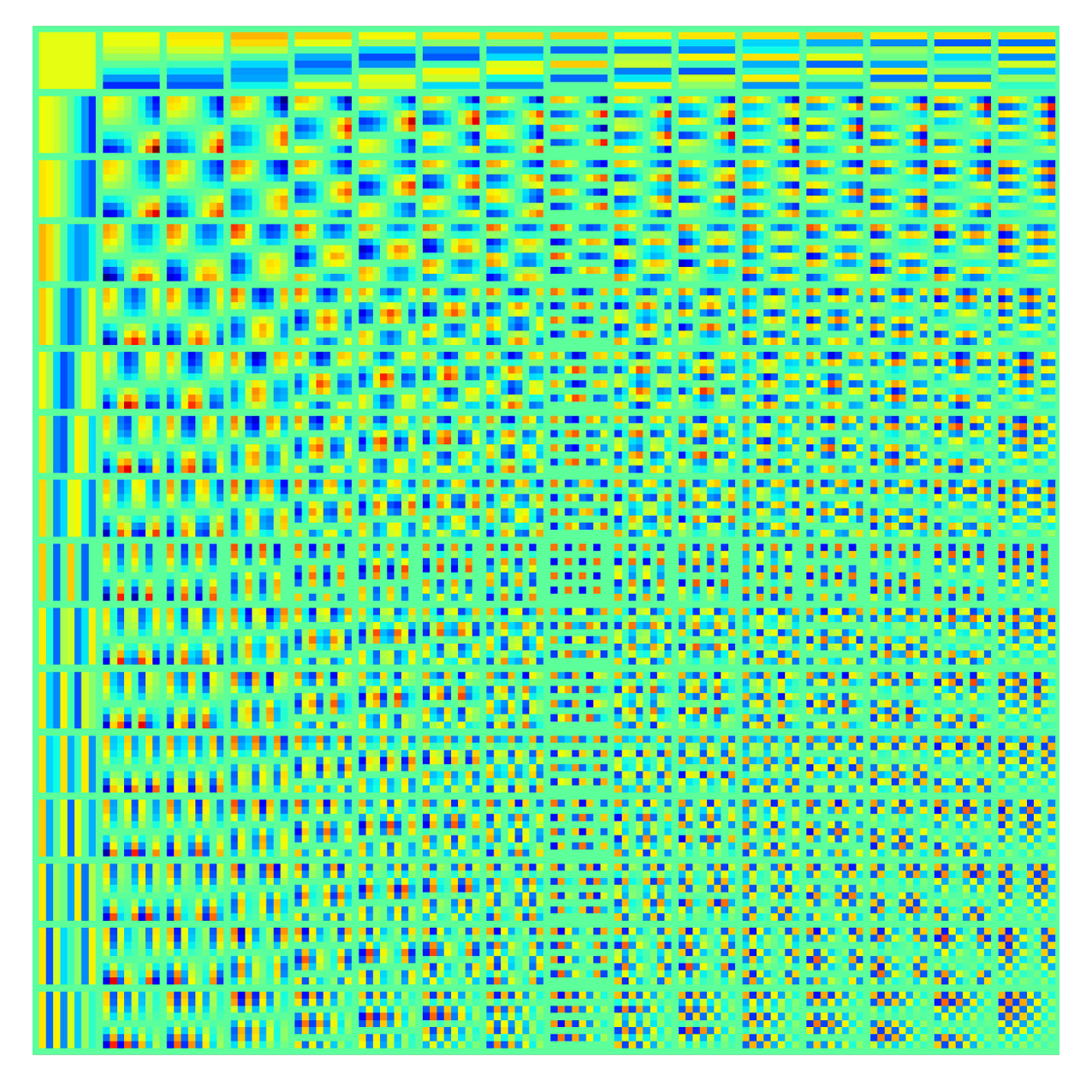
2.1. DCT Dictionary Learning
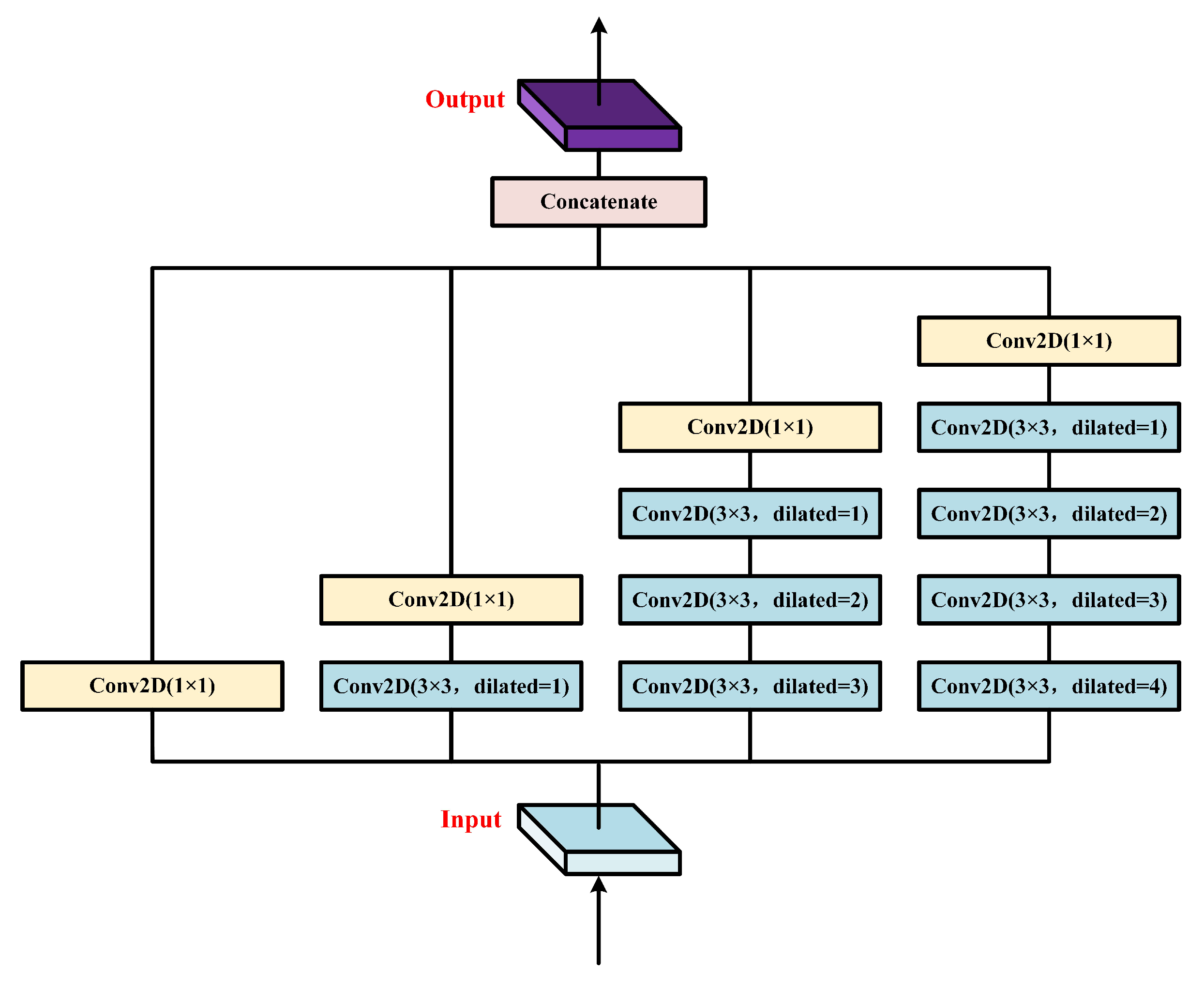
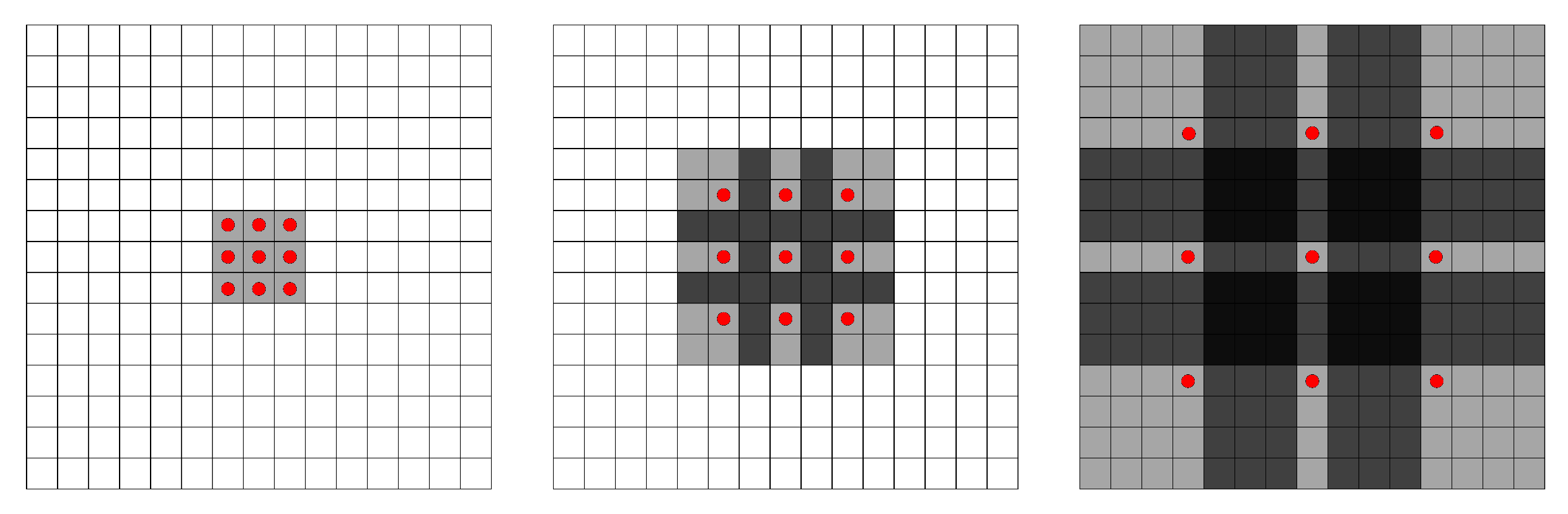
2.2. Contextual Feature Fusion Module
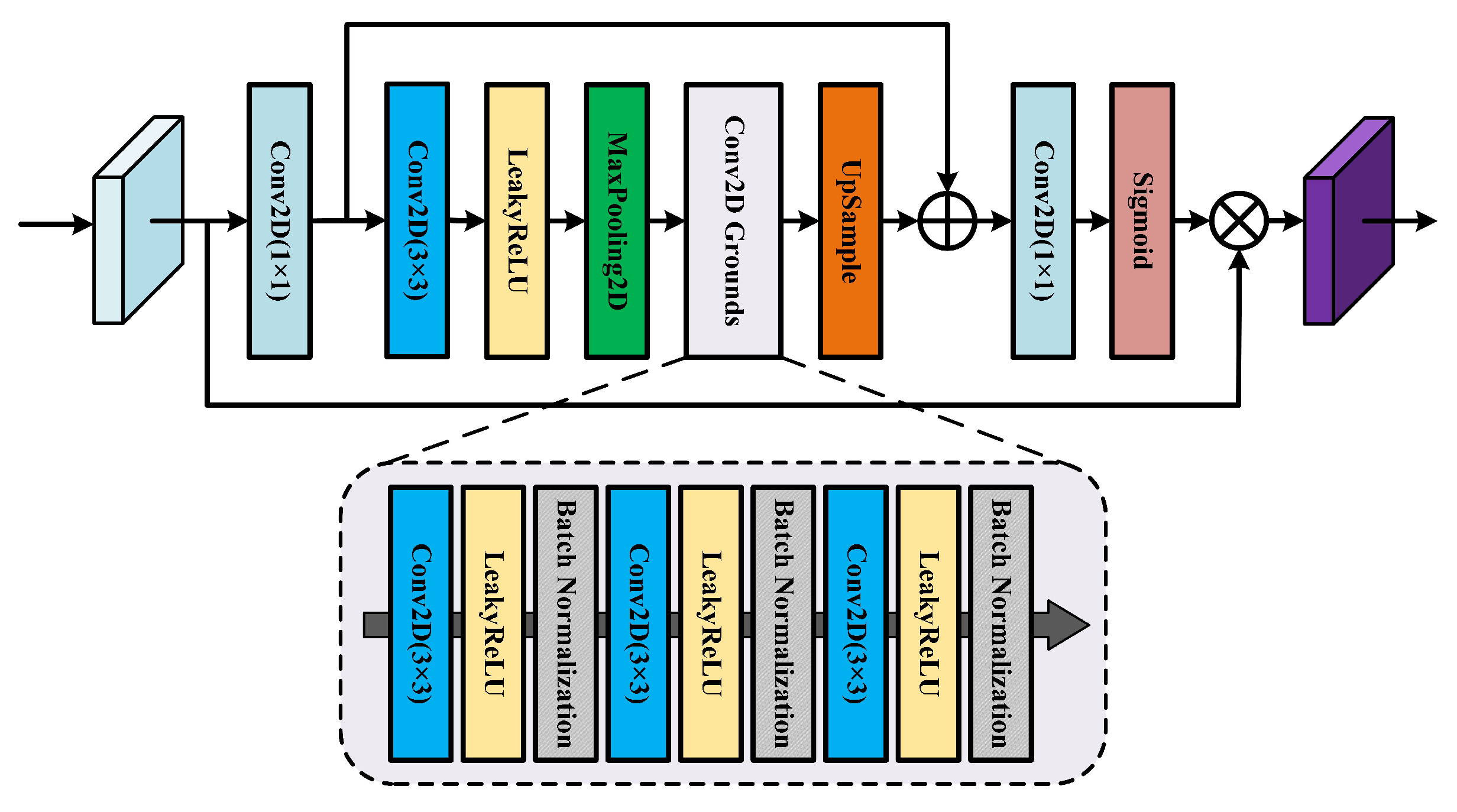
2.3. Enhanced Spatial Attention Module
2.4. Hybrid Loss Function
2.5. Structure of the Deep Learning Network
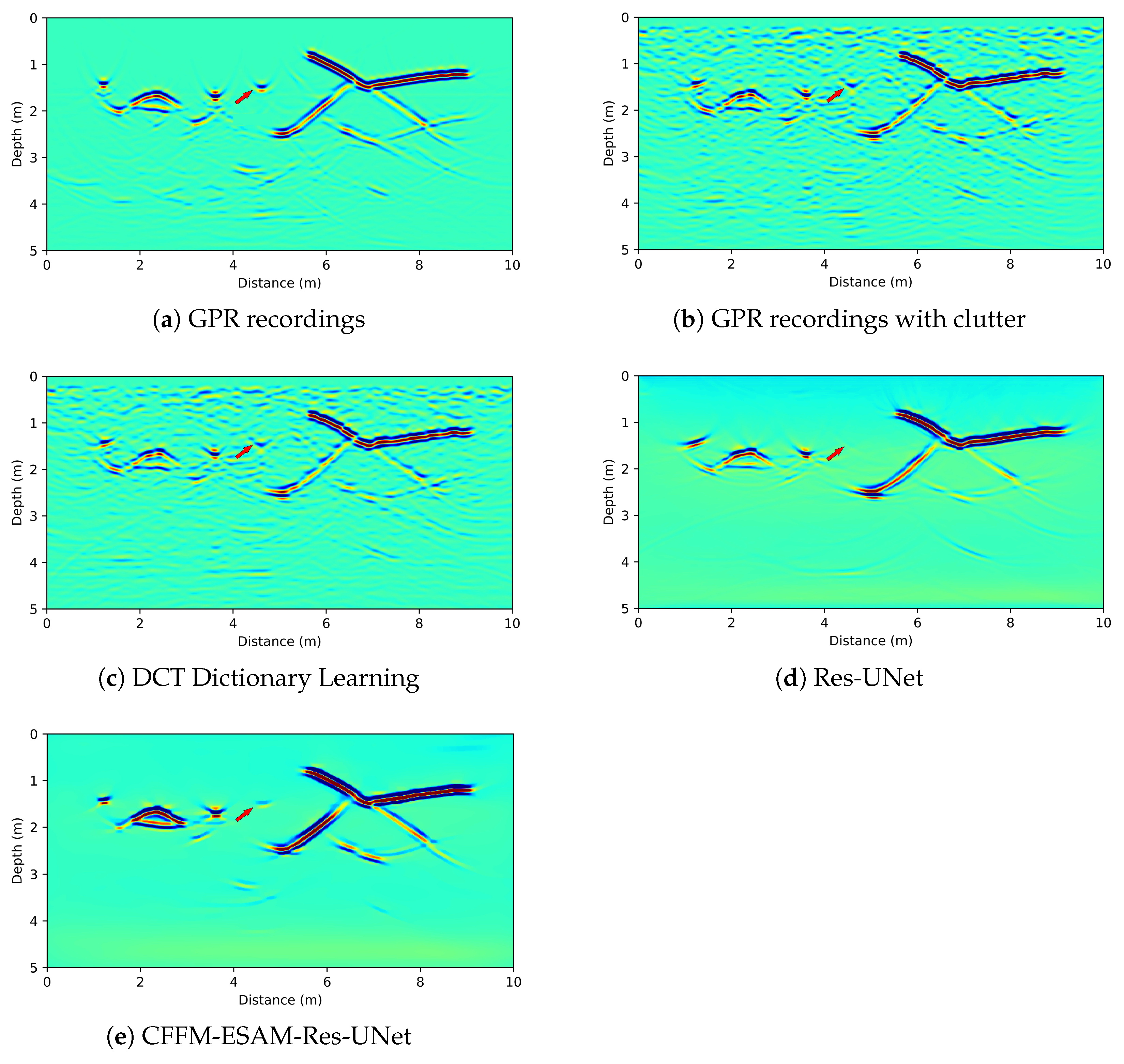
2.6. Reverse Time Migration
2.7. Comprehensive Workflow
3. Results
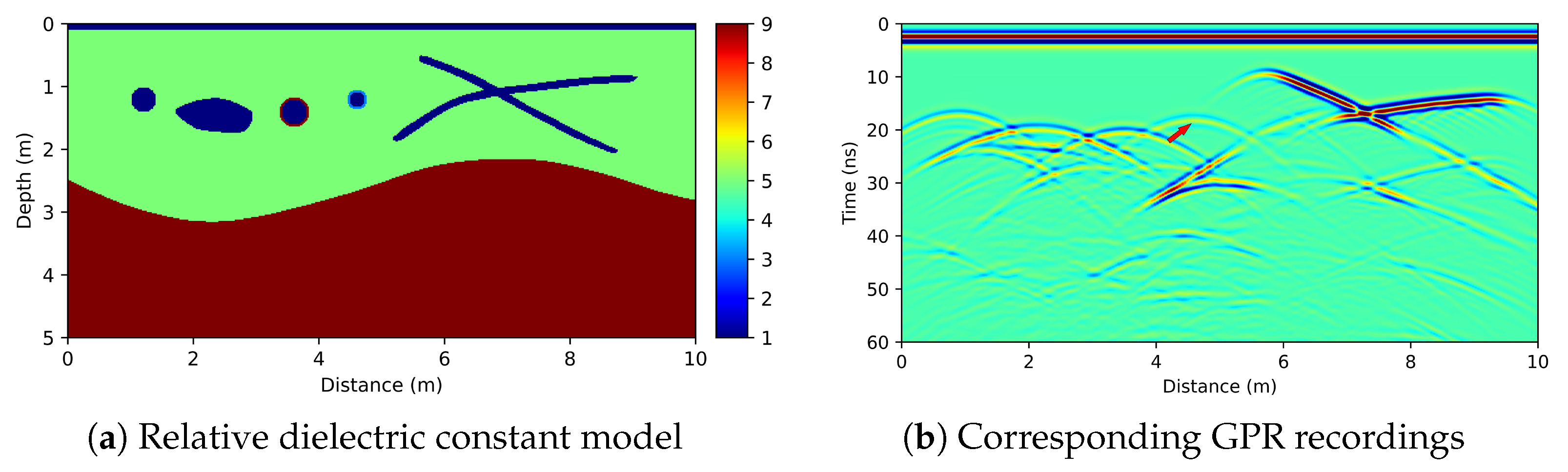
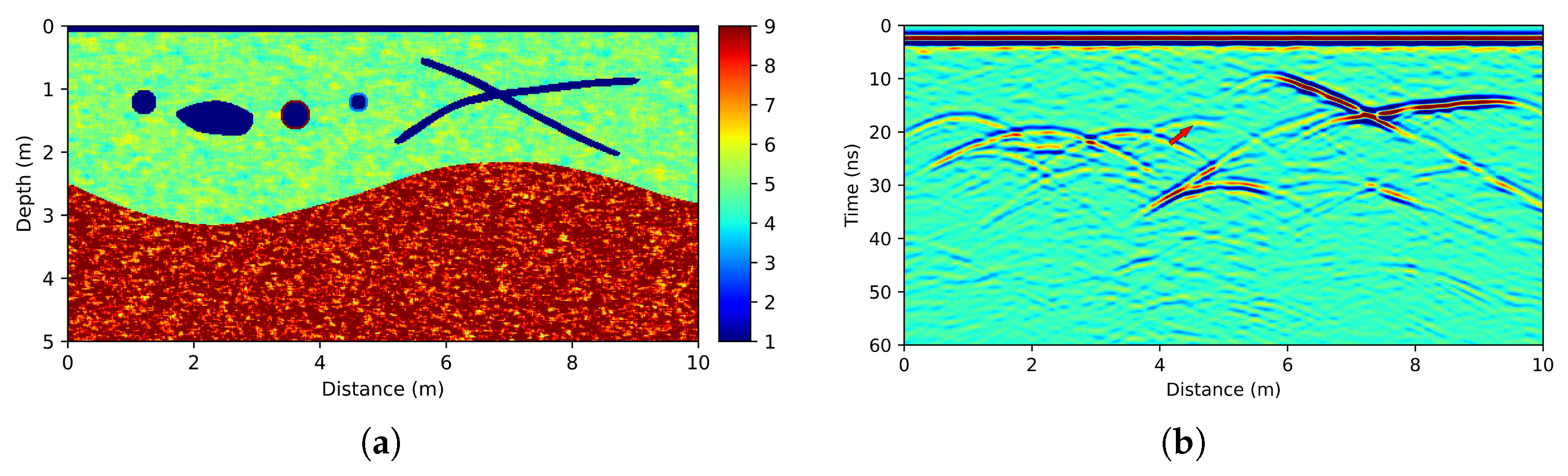
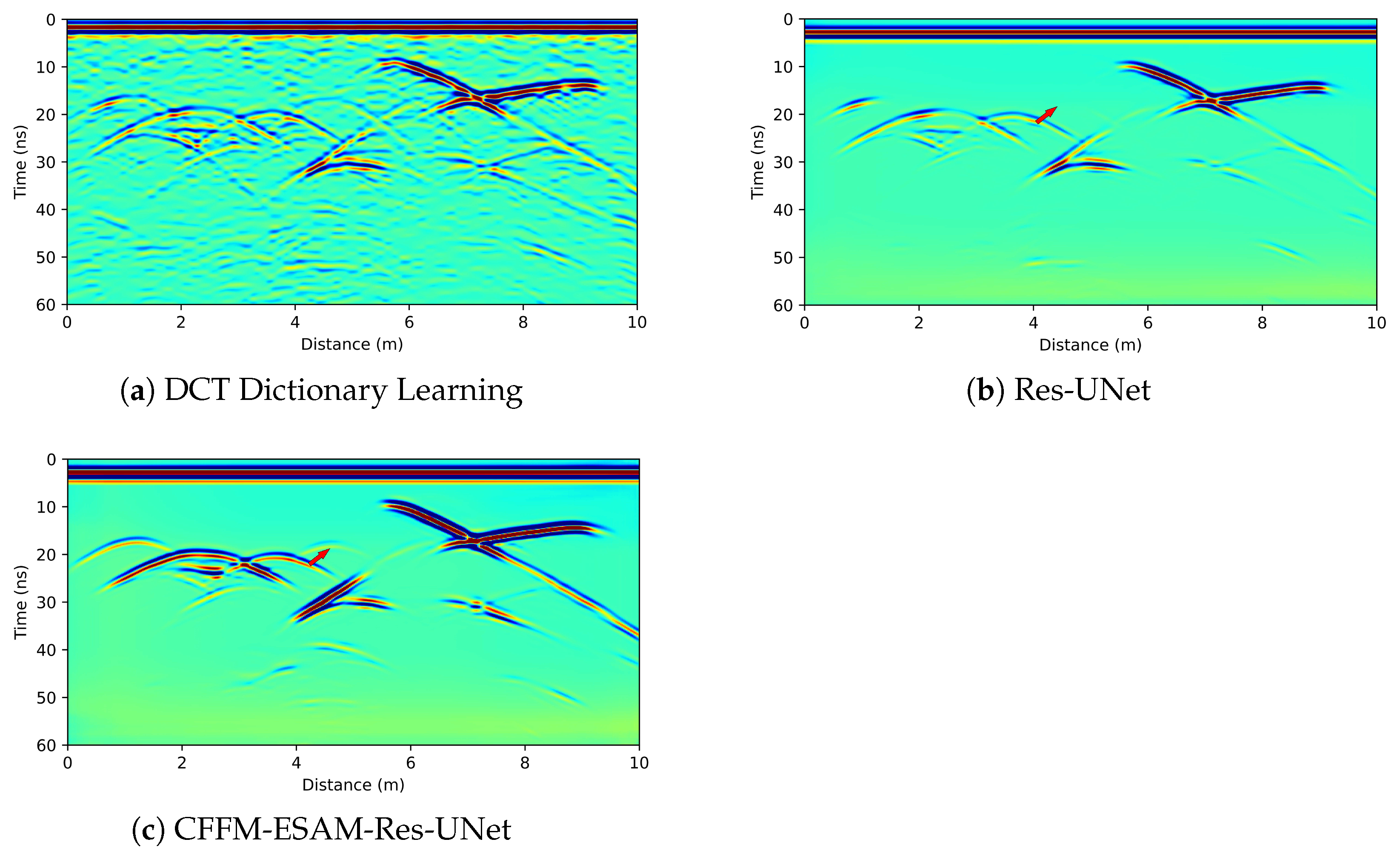
3.1. Synthesis of Data Test
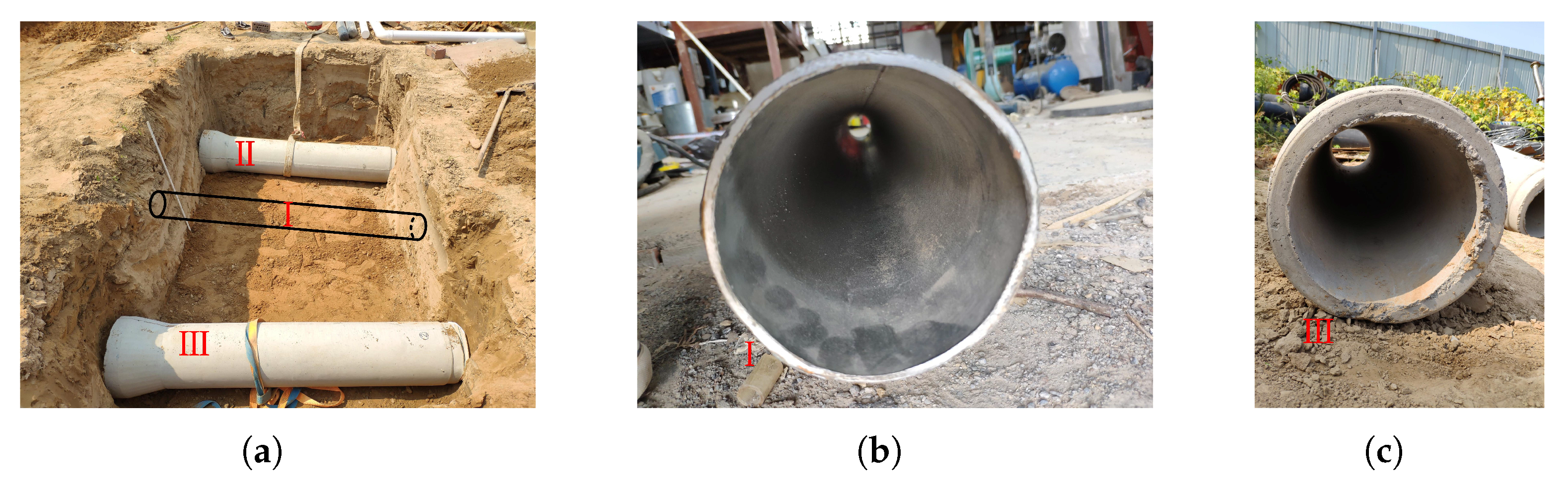
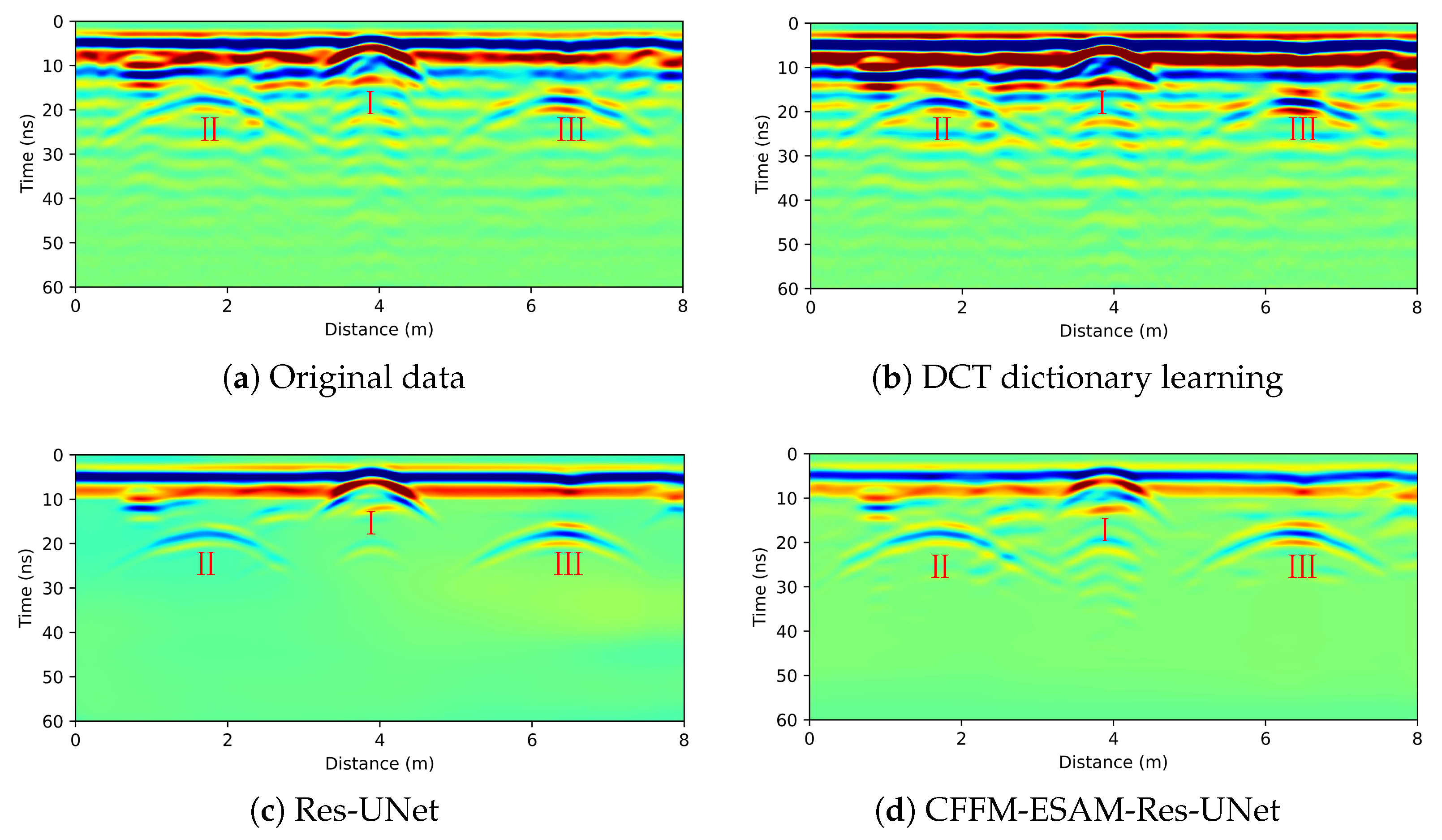
3.2. Experimental Data
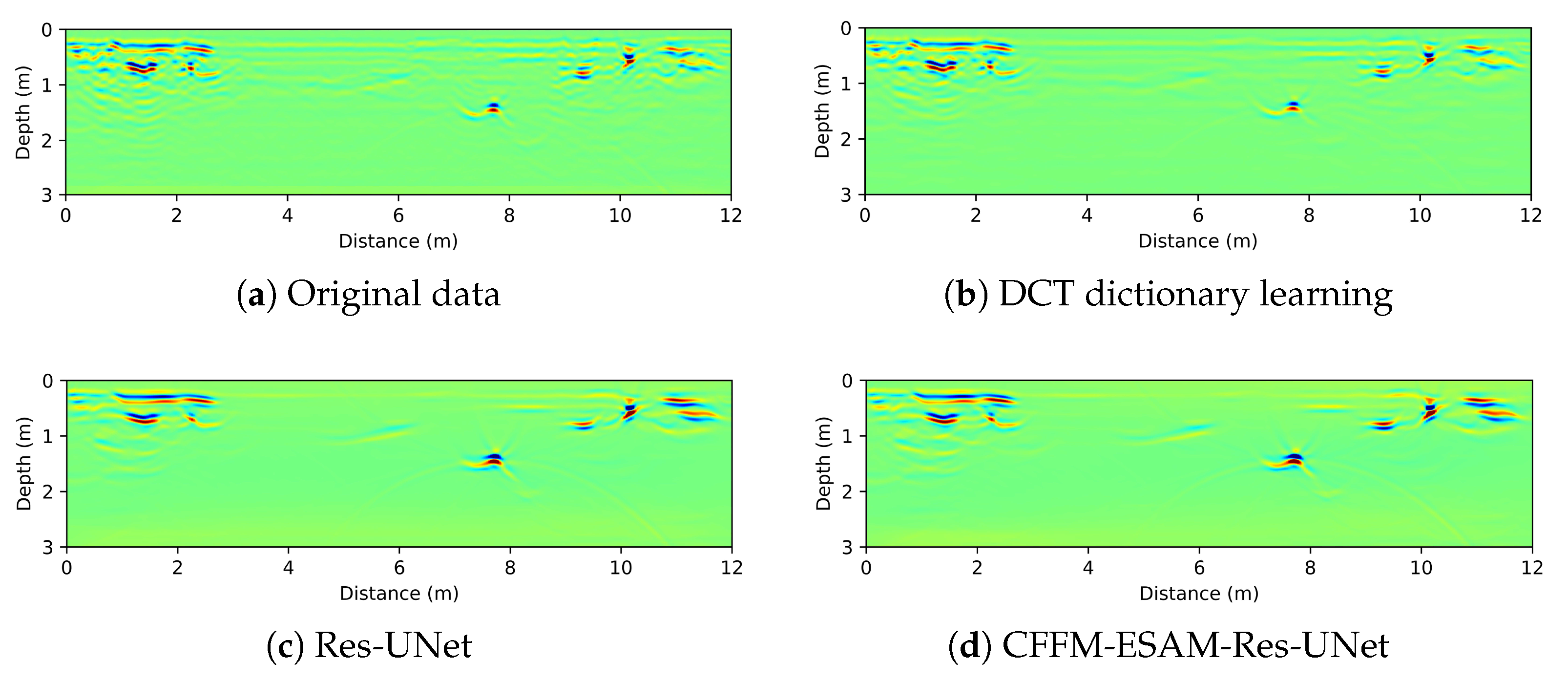
3.3. Field Data
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| GPR | Ground-penetrating radar |
| CFFM | contextual feature fusion module |
| ESAM | enhanced spatial attention module |
| DCT | discrete cosine transform |
| TV | total variation |
| AG | attention gate |
| MSE | mean-square error |
| RMSprop | root mean square prop |
| FDTD | finite difference time domain |
| PSNR | peak signal-to-noise ratio |
| SSIM | structural similarity index measure |
References
- Solla, M.; Pérez-Gracia, V.; Fontul, S. A review of GPR application on transport infrastructures: Troubleshooting and best practices. Remote Sens. 2021, 13, 672. [Google Scholar] [CrossRef]
- Lombardi, F.; Podd, F.; Solla, M. From its core to the niche: Insights from GPR applications. Remote Sens. 2022, 14, 3033. [Google Scholar] [CrossRef]
- Hou, F.; Lei, W.; Li, S.; Xi, J. Deep learning-based subsurface target detection from GPR scans. IEEE Sensors J. 2021, 21, 8161–8171. [Google Scholar] [CrossRef]
- Wu, K.; Rodriguez, G.A.; Zajc, M.; Jacquemin, E.; Clément, M.; De Coster, A.; Lambot, S. A new drone-borne GPR for soil moisture mapping. Remote Sens. Environ. 2019, 235, 111456. [Google Scholar] [CrossRef]
- Solla, M.; Lagüela, S.; Fernández, N.; Garrido, I. Assessing rebar corrosion through the combination of nondestructive GPR and IRT methodologies. Remote Sens. 2019, 11, 1705. [Google Scholar] [CrossRef] [Green Version]
- Garrido, I.; Solla, M.; Lagüela, S.; Fernández, N. Irt and gpr techniques for moisture detection and characterisation in buildings. Sensors 2020, 20, 6421. [Google Scholar] [CrossRef] [PubMed]
- Alani, A.M.; Tosti, F.; Ciampoli, L.B.; Gagliardi, V.; Benedetto, A. An integrated investigative approach in health monitoring of masonry arch bridges using GPR and InSAR technologies. NDT E Int. 2020, 115, 102288. [Google Scholar] [CrossRef]
- Liu, Z.; Wu, W.; Gu, X.; Li, S.; Wang, L.; Zhang, T. Application of combining YOLO models and 3D GPR images in road detection and maintenance. Remote Sens. 2021, 13, 1081. [Google Scholar] [CrossRef]
- Xu, J.; Zhang, J.; Sun, W. Recognition of the typical distress in concrete pavement based on GPR and 1D-CNN. Remote Sens. 2021, 13, 2375. [Google Scholar] [CrossRef]
- Rasol, M.; Pais, J.C.; Pérez-Gracia, V.; Solla, M.; Fernandes, F.M.; Fontul, S.; Ayala-Cabrera, D.; Schmidt, F.; Assadollahi, H. GPR monitoring for road transport infrastructure: A systematic review and machine learning insights. Constr. Build. Mater. 2022, 324, 126686. [Google Scholar] [CrossRef]
- Forte, E.; Santin, I.; Ponti, S.; Colucci, R.; Gutgesell, P.; Guglielmin, M. New insights in glaciers characterization by differential diagnosis integrating GPR and remote sensing techniques: A case study for the Eastern Gran Zebrù glacier (Central Alps). Remote Sens. Environ. 2021, 267, 112715. [Google Scholar] [CrossRef]
- Schneidhofer, P.; Tonning, C.; Cannell, R.J.; Nau, E.; Hinterleitner, A.; Verhoeven, G.J.; Gustavsen, L.; Paasche, K.; Neubauer, W.; Gansum, T. The Influence of Environmental Factors on the Quality of GPR Data: The Borre Monitoring Project. Remote Sens. 2022, 14, 3289. [Google Scholar] [CrossRef]
- Bai, H.; Sinfield, J.V. Improved background and clutter reduction for pipe detection under pavement using Ground Penetrating Radar (GPR). J. Appl. Geophys. 2020, 172, 103918. [Google Scholar] [CrossRef]
- Oliveira, R.J.; Caldeira, B.; Teixidó, T.; Borges, J.F. GPR Clutter Reflection Noise-Filtering through Singular Value Decomposition in the Bidimensional Spectral Domain. Remote Sens. 2021, 13, 2005. [Google Scholar] [CrossRef]
- Wu, Z.; Liu, L.; Li, J.; Xu, H.; Wang, B. A novel 3D clutter removal for GPR pipe detection via tensor RPCA. In Proceedings of the Seventh Asia Pacific Conference on Optics Manufacture and 2021 International Forum of Young Scientists on Advanced Optical Manufacturing (APCOM and YSAOM 2021), Shanghai, China, 28–31 October 2021; SPIE: Bellingham, WA, USA, 2022; Volume 12166, pp. 1816–1821. [Google Scholar]
- Kumlu, D.; Erer, I. GPR clutter reduction by robust orthonormal subspace learning. IEEE Access 2020, 8, 74145–74156. [Google Scholar] [CrossRef]
- Feng, D.; Liu, S.; Yang, J.; Wang, X.; Wang, X. The Noise Attenuation and Stochastic Clutter Removal of Ground Penetrating Radar Based on the K-SVD Dictionary Learning. IEEE Access 2021, 9, 74879–74890. [Google Scholar] [CrossRef]
- Chen, G.; Fu, L.; Chen, K.; Boateng, C.D.; Ge, S. Adaptive ground clutter reduction in ground-penetrating radar data based on principal component analysis. IEEE Trans. Geosci. Remote Sens. 2019, 57, 3271–3282. [Google Scholar] [CrossRef]
- Abd Shehab, M.; Al Obaidi, M.A.S.; Hos, I.; Karamzadeh, S. Subspace Clutter Removal Techniques in GPR Images. Prog. Electromagn. Res. M 2019, 82, 139–147. [Google Scholar] [CrossRef] [Green Version]
- Su, Q.; Bi, B.; Zhang, P.; Shen, L.; Huang, X.; Xin, Q. GPR Image Clutter Suppression Using Gaussian Curvature Decomposition in the PCA Domain. Remote Sens. 2022, 14, 4879. [Google Scholar] [CrossRef]
- Kumlu, D.; Erer, I.; Kaplan, N.H. Low complexity clutter removal in GPR images via lattice filters. Digit. Signal Process. 2020, 101, 102724. [Google Scholar] [CrossRef]
- Liu, L.; Wu, Z.; Xu, H.; Wang, B.; Li, J. GPR Clutter Removal Based on Factor Group-Sparse Regularization. IEEE Geosci. Remote Sens. Lett. 2021, 19, 3509305. [Google Scholar] [CrossRef]
- Kumlu, D.; Erer, I. Improved clutter removal in GPR by robust nonnegative matrix factorization. IEEE Geosci. Remote Sens. Lett. 2019, 17, 958–962. [Google Scholar] [CrossRef]
- Kumlu, D.; Erer, I. GPR clutter reduction by multi-resolution based tensor RPCA. Int. J. Remote Sens. 2021, 42, 7295–7312. [Google Scholar] [CrossRef]
- Ni, Z.K.; Pan, J.; Shi, C.; Ye, S.; Zhao, D.; Fang, G. DL-based clutter removal in migrated GPR data for detection of buried target. IEEE Geosci. Remote Sens. Lett. 2021, 19, 3507205. [Google Scholar] [CrossRef]
- Ni, Z.K.; Zhao, D.; Shi, C.; Pan, J.; Zhou, B.; Fang, G. Using dictionary learning for clutter reduction in GPR B-scan images. Remote Sens. Lett. 2023, 14, 39–48. [Google Scholar] [CrossRef]
- Tong, Z.; Gao, J.; Yuan, D. Advances of deep learning applications in ground-penetrating radar: A survey. Constr. Build. Mater. 2020, 258, 120371. [Google Scholar] [CrossRef]
- Markovic, M.; Malehmir, R.; Malehmir, A. Diffraction Denoising Using Autoencoder. In Proceedings of the 83rd EAGE Annual Conference & Exhibition. European Association of Geoscientists & Engineers, Online, 6–9 June 2022; Volume 2022, pp. 1–5. [Google Scholar]
- Ni, Z.K.; Ye, S.; Shi, C.; Li, C.; Fang, G. Clutter suppression in GPR B-scan images using robust autoencoder. IEEE Geosci. Remote Sens. Lett. 2020, 19, 3500705. [Google Scholar] [CrossRef]
- Temlioglu, E.; Erer, I. A novel convolutional autoencoder-based clutter removal method for buried threat detection in ground-penetrating radar. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5103313. [Google Scholar] [CrossRef]
- Feng, D.; Wang, X.; Wang, X.; Ding, S.; Zhang, H. Deep convolutional denoising autoencoders with network structure optimization for the high-fidelity attenuation of random GPR noise. Remote Sens. 2021, 13, 1761. [Google Scholar] [CrossRef]
- Sun, H.H.; Cheng, W.; Fan, Z. Learning to Remove Clutter in Real-World GPR Images Using Hybrid Data. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5113714. [Google Scholar] [CrossRef]
- He, X.; Li, Y.; Wang, C.; Zheng, R.; Li, X. Separate removal of random noise and clutter in GPR images based on Self2Self and NSST. Int. J. Remote Sens. 2022, 43, 3490–3508. [Google Scholar] [CrossRef]
- Ni, Z.K.; Shi, C.; Pan, J.; Zheng, Z.; Ye, S.; Fang, G. Declutter-GAN: GPR B-Scan Data Clutter Removal Using Conditional Generative Adversarial Nets. IEEE Geosci. Remote Sens. Lett. 2022, 19, 4023105. [Google Scholar] [CrossRef]
- Yamaguchi, T.; Mizutani, T.; Nagayama, T. Mapping subsurface utility pipes by 3-D convolutional neural network and Kirchhoff migration using GPR images. IEEE Trans. Geosci. Remote Sens. 2020, 59, 6525–6536. [Google Scholar] [CrossRef]
- Feng, D.; Li, T.; Li, G.; Wang, X. Reverse time migration of GPR data based on accurate velocity estimation and artifacts removal using total variation de-noising. J. Appl. Geophys. 2022, 198, 104563. [Google Scholar] [CrossRef]
- Jin, Y.; Duan, Y. 2d wavelet decomposition and fk migration for identifying fractured rock areas using ground penetrating radar. Remote Sens. 2021, 13, 2280. [Google Scholar] [CrossRef]
- Liu, H.; Yue, Y.; Liu, C.; Spencer, B., Jr.; Cui, J. Automatic recognition and localization of underground pipelines in GPR B-scans using a deep learning model. Tunn. Undergr. Sp. Tech. 2023, 134, 104861. [Google Scholar] [CrossRef]
- Chen, L.C.; Papandreou, G.; Kokkinos, I.; Murphy, K.; Yuille, A.L. Deeplab: Semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected crfs. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 40, 834–848. [Google Scholar] [CrossRef] [Green Version]
- Wang, Q.; Wu, B.; Zhu, P.; Li, P.; Zuo, W.; Hu, Q. Supplementary material for ‘ECA-Net: Efficient channel attention for deep convolutional neural networks. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020; pp. 13–19. [Google Scholar]
- Oktay, O.; Schlemper, J.; Folgoc, L.L.; Lee, M.; Heinrich, M.; Misawa, K.; Mori, K.; McDonagh, S.; Hammerla, N.Y.; Kainz, B.; et al. Attention u-net: Learning where to look for the pancreas. arXiv 2018, arXiv:1804.03999. [Google Scholar]
- Hu, J.; Shen, L.; Sun, G. Squeeze-and-excitation networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 7132–7141. [Google Scholar]
- Luo, J.; Lei, W.; Hou, F.; Wang, C.; Ren, Q.; Zhang, S.; Luo, S.; Wang, Y.; Xu, L. GPR B-Scan Image Denoising via Multi-Scale Convolutional Autoencoder with Data Augmentation. Electronics 2021, 10, 1269. [Google Scholar] [CrossRef]
- Li, J.; Zhang, N.; Xu, H.; Wang, B.; Liu, L.; Zhao, M. Polarimetric Chaotic Ground Penetrating Radar for Underground Pipes Detection. IEEE Sensors J. 2022, 22, 15517–15525. [Google Scholar] [CrossRef]
- Kumlu, D.; Erer, I. The multiscale directional neighborhood filter and its application to clutter removal in GPR data. Signal Image Video Process. 2018, 12, 1237–1244. [Google Scholar] [CrossRef]
- Giannakis, I.; Giannopoulos, A.; Warren, C. Realistic FDTD GPR antenna models optimized using a novel linear/nonlinear full-waveform inversion. IEEE Trans. Geosci. Remote Sens. 2018, 57, 1768–1778. [Google Scholar] [CrossRef]
- Zhao, S.; Al-Qadi, I. Pavement drainage pipe condition assessment by GPR image reconstruction using FDTD modeling. Constr. Build. Mater. 2017, 154, 1283–1293. [Google Scholar] [CrossRef]
- Lei, J.; Wang, Z.; Fang, H.; Ding, X.; Zhang, X.; Yang, M.; Wang, H. Analysis of GPR wave propagation in complex underground structures using CUDA-implemented conformal FDTD method. Int. J. Antennas Propag. 2019, 2019, 5043028. [Google Scholar] [CrossRef]
- Li, Y.; Wang, N.; Lei, J.; Wang, F.; Li, C. Modeling GPR Wave Propagation in Complex Underground Structures Using Conformal ADI-FDTD Algorithm. Appl. Sci. 2022, 12, 5219. [Google Scholar] [CrossRef]
- Feng, D.; Wang, X.; Zhang, B.; Ren, Z. An investigation into the electromagnetic response of porous media with GPR using stochastic processes and FEM of B-spline wavelet on the interval. J. Appl. Geophys. 2019, 169, 174–182. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Category | Typical Case | Pros and Cons |
|---|---|---|---|
| Traditional Algorithm | Subspace | ICA, PCA, RPCA, MCA, RNMF, Tensor RPCA, TRPCA-BPF | Low computational cost and simple method; Requires manually given parameters, Difficult to handle complex situations. |
| Sparse Representation | LRSD, K-SVD, Dictionary Learning | Denoising performance is more stable; requires manually given parameters, higher computational cost | |
| Deep Learning Algorithm | - | Autoencoder, CR-Net, Declutter-GAN | Superior denoising effect; Difficulty in accurately capturing target signals |
| Method | PSNR (dB) | SSIM |
|---|---|---|
| GPR recording with clutter | 6.43 | 0.7449 |
| DCT Dictionary Learning | 15.57 | 0.8276 |
| Res-Unet | 28.40 | 0.9697 |
| CFFM-ESAM-Res-UNet | 31.65 | 0.9896 |
| No. | Material | Depth (m) | Radius (m) |
|---|---|---|---|
| I | Metal pipe | 0.10 | 0.20 |
| II | Concrete pipe | 0.80 | 0.90 |
| III | Concrete pipe | 0.90 | 0.90 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Dang, P.; Xu, X.; Lei, J. Deep Learning for Improved Subsurface Imaging: Enhancing GPR Clutter Removal Performance Using Contextual Feature Fusion and Enhanced Spatial Attention. Remote Sens. 2023, 15, 1729. https://doi.org/10.3390/rs15071729
Li Y, Dang P, Xu X, Lei J. Deep Learning for Improved Subsurface Imaging: Enhancing GPR Clutter Removal Performance Using Contextual Feature Fusion and Enhanced Spatial Attention. Remote Sensing. 2023; 15(7):1729. https://doi.org/10.3390/rs15071729
Chicago/Turabian StyleLi, Yi, Pengfei Dang, Xiaohu Xu, and Jianwei Lei. 2023. "Deep Learning for Improved Subsurface Imaging: Enhancing GPR Clutter Removal Performance Using Contextual Feature Fusion and Enhanced Spatial Attention" Remote Sensing 15, no. 7: 1729. https://doi.org/10.3390/rs15071729