
A Data Assimilation Method Combined with Machine Learning and Its Application to Anthropogenic Emission Adjustment in CMAQ

 , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
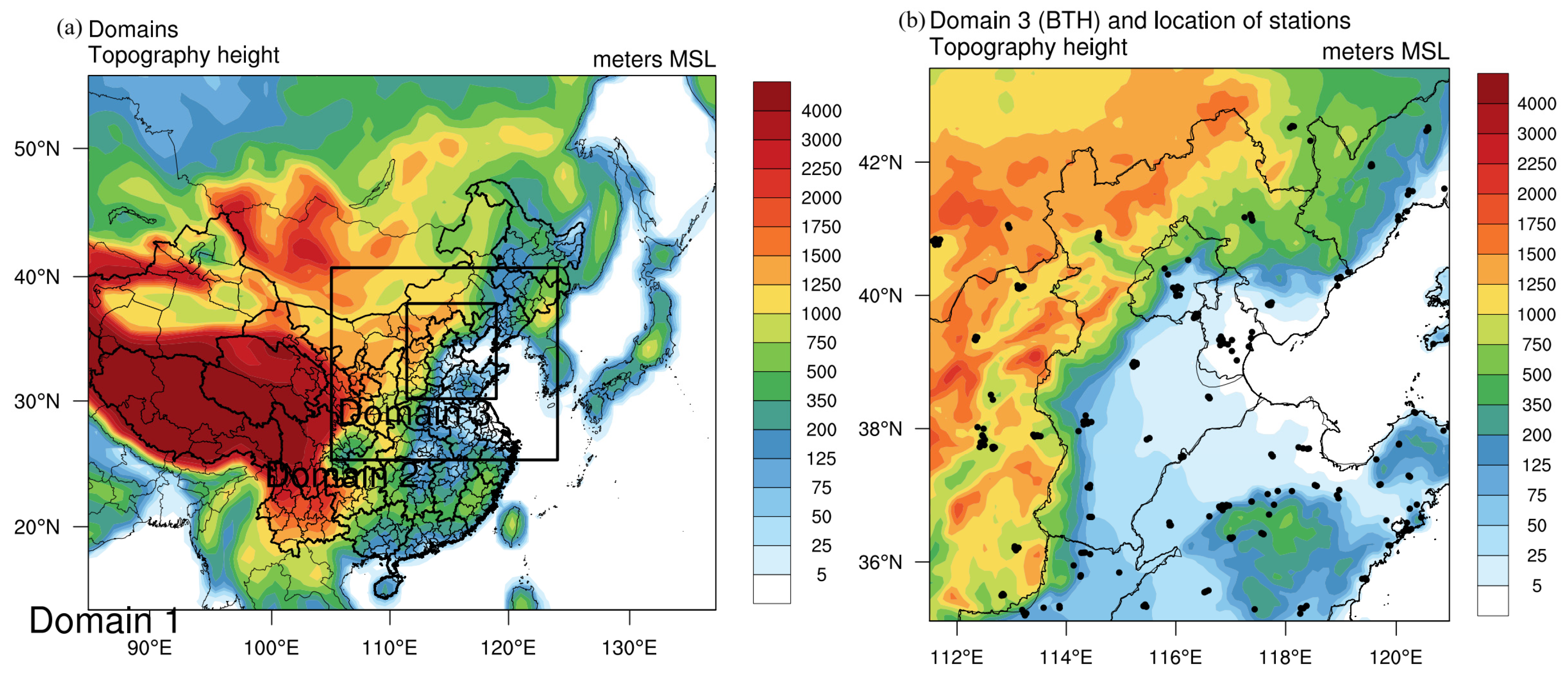
2.1. Model and Dataset
2.2. Model Configurations
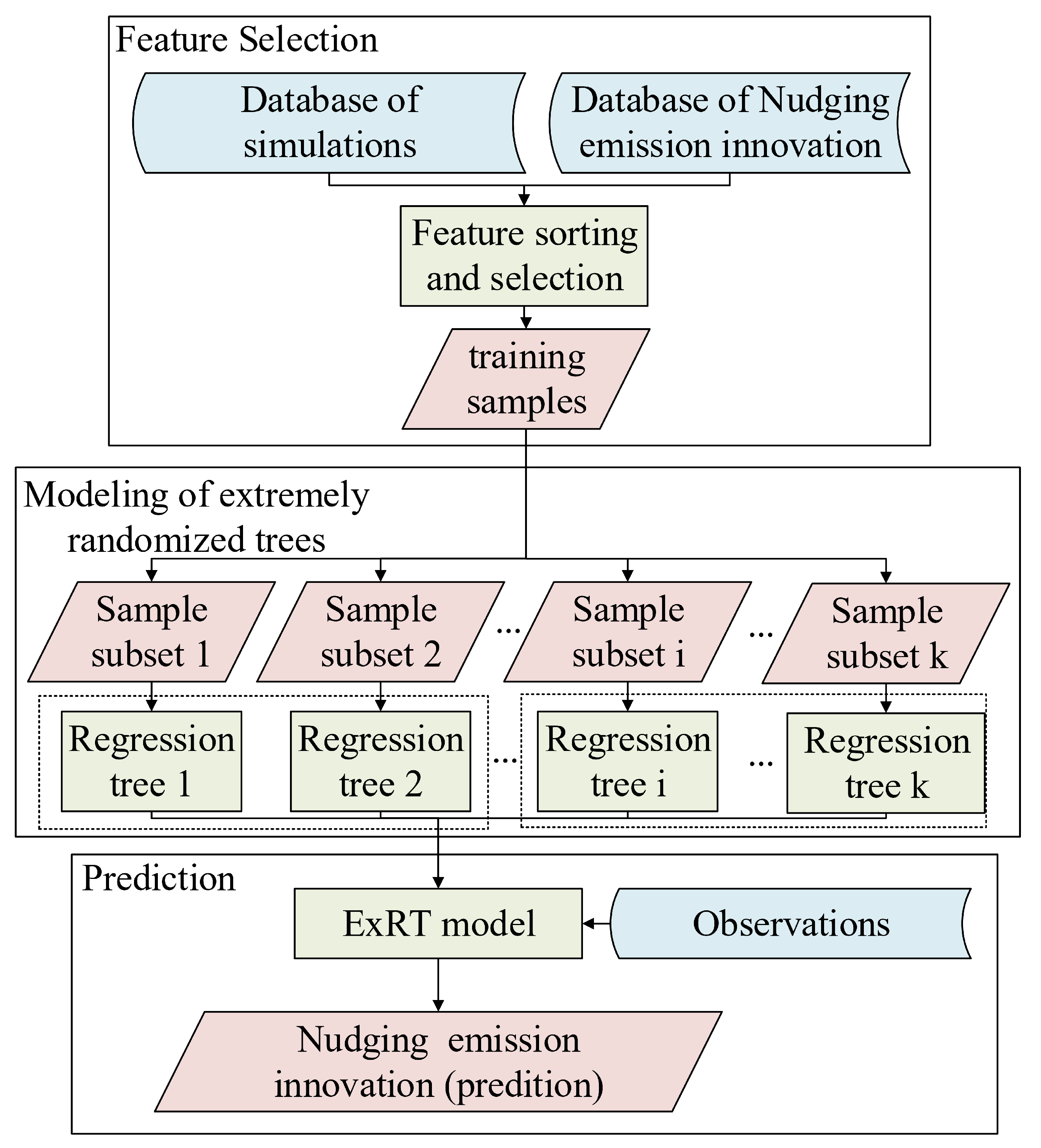
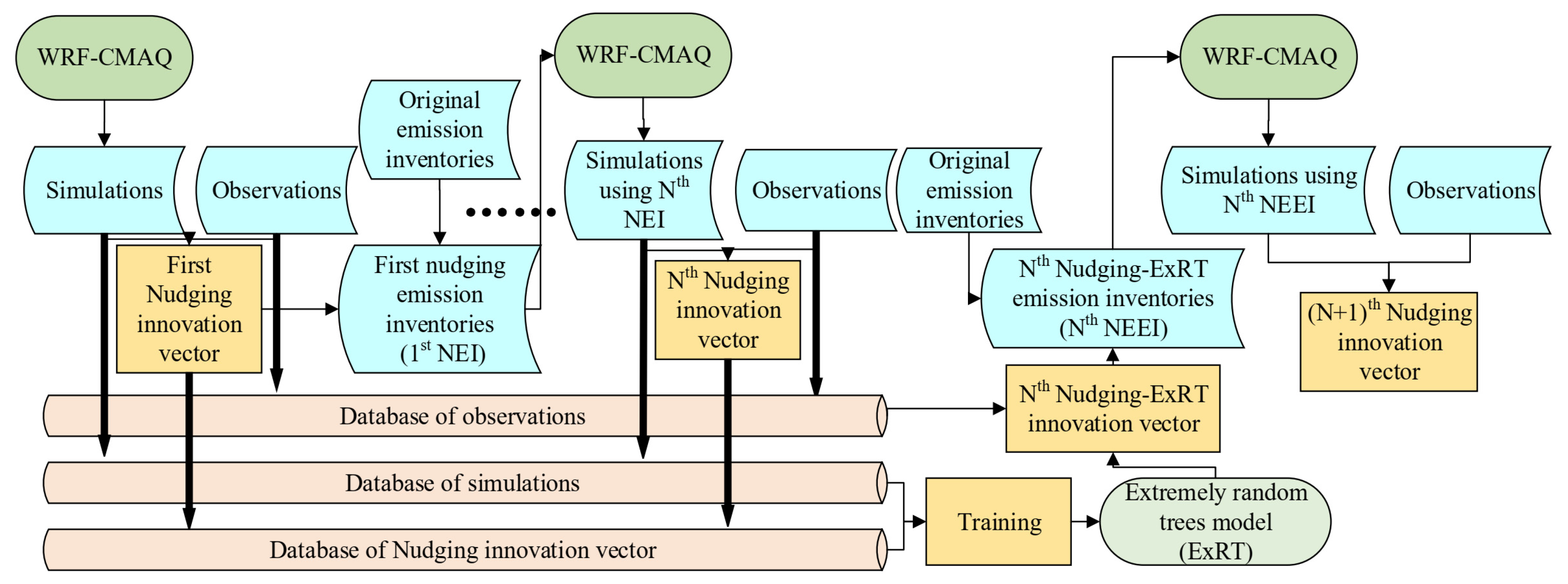
2.3. The Combination of Nudging and ExRT
3. Results
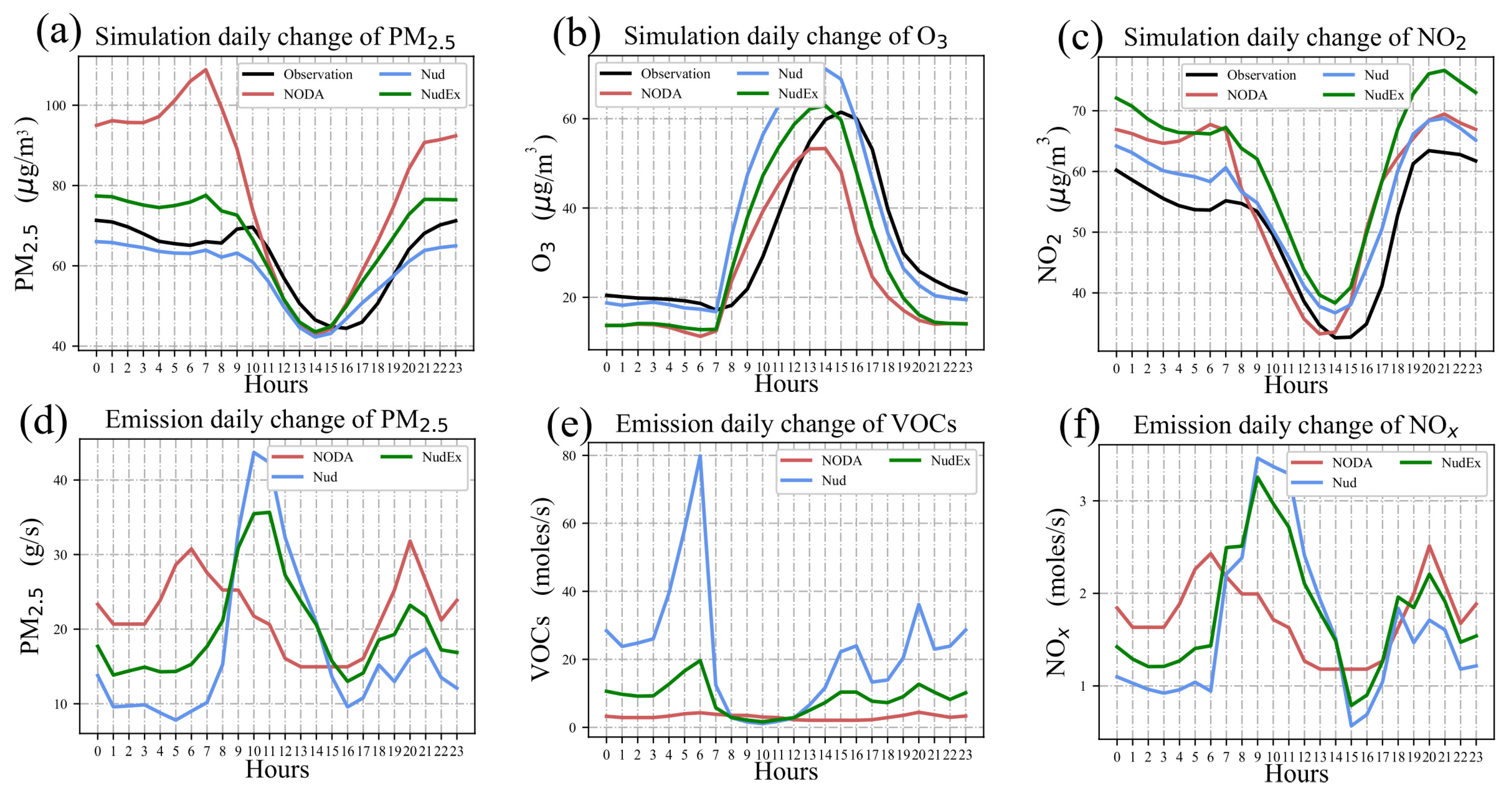
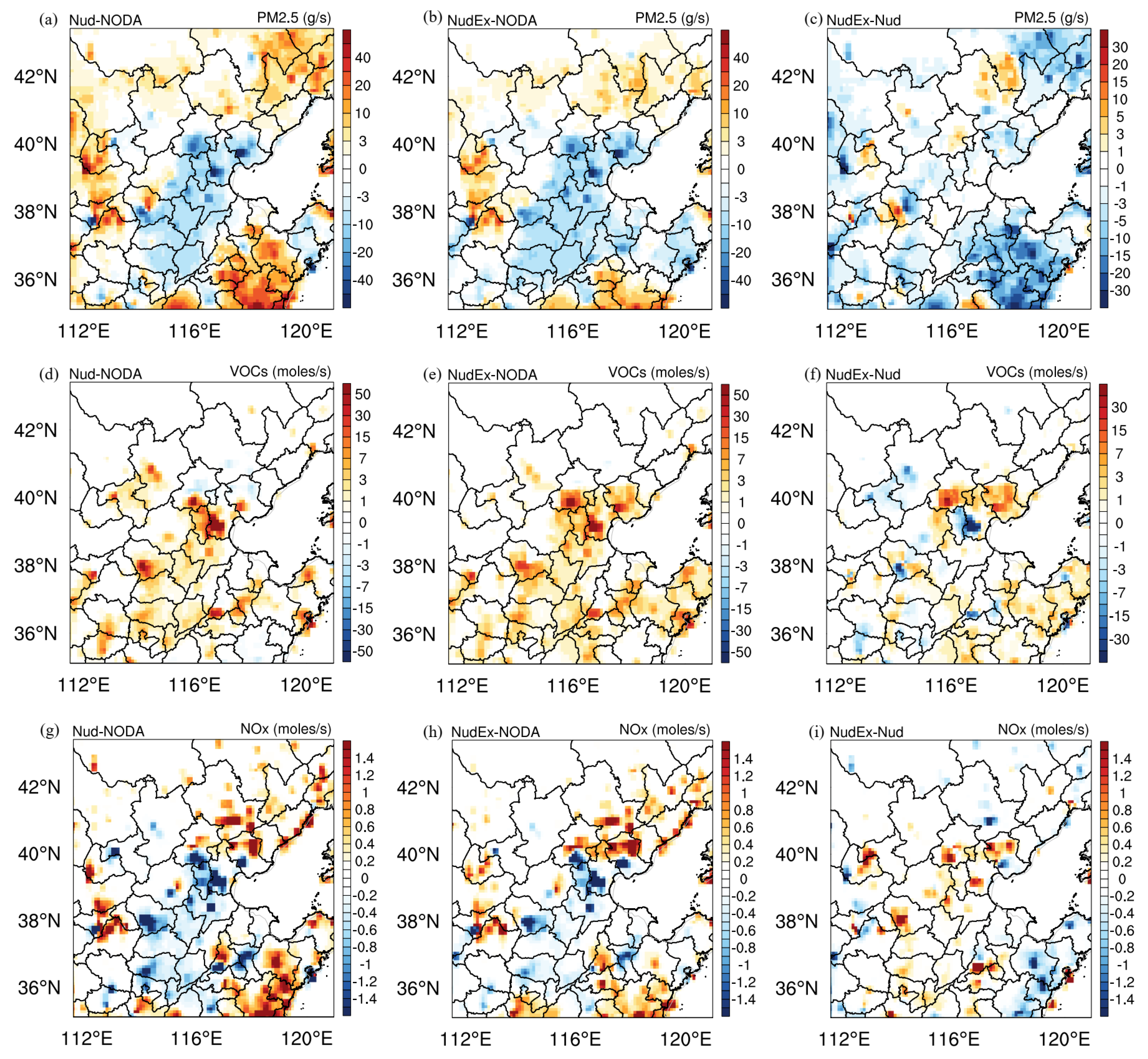
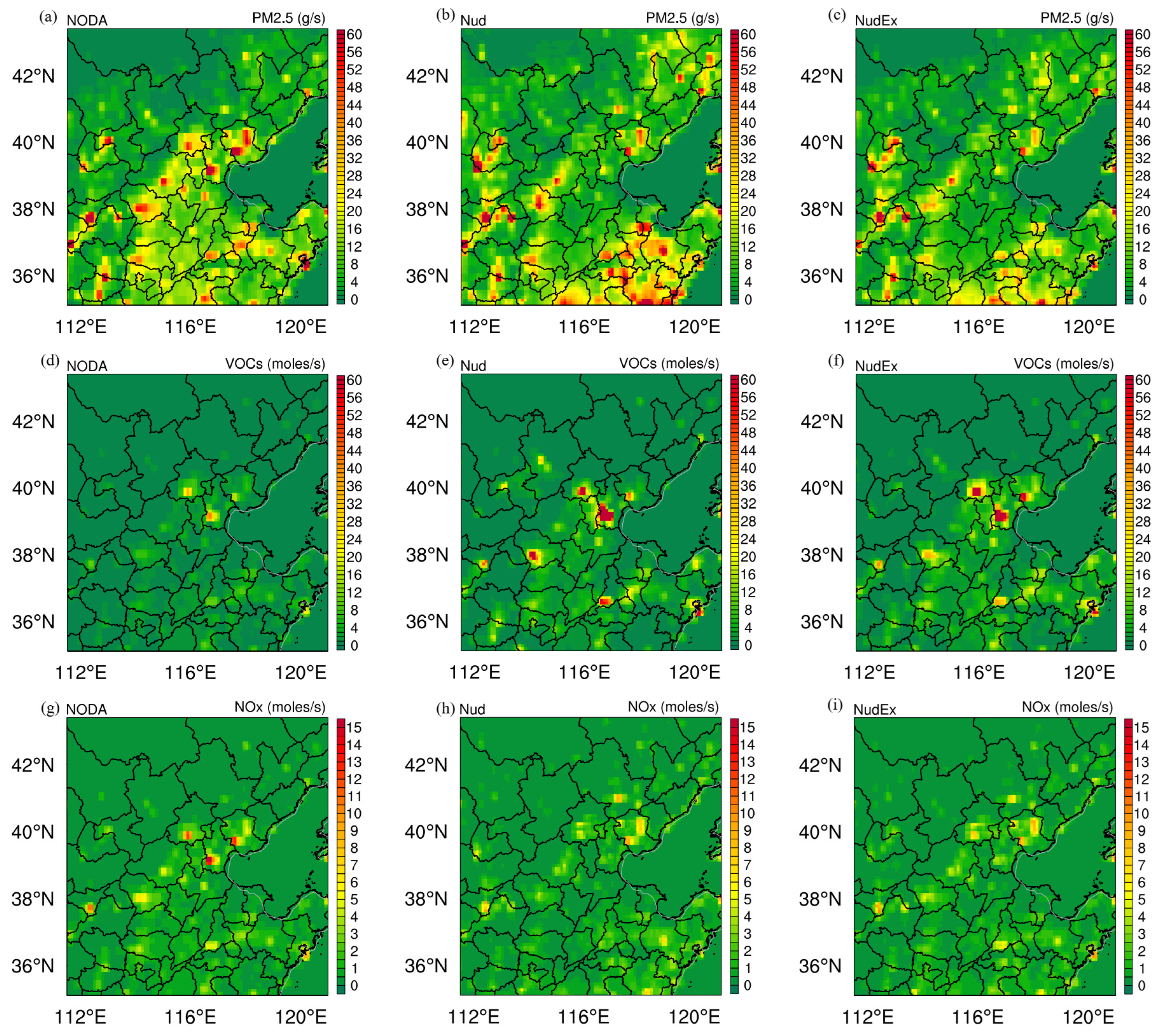
3.1. Anthropogenic Emission Adjustment
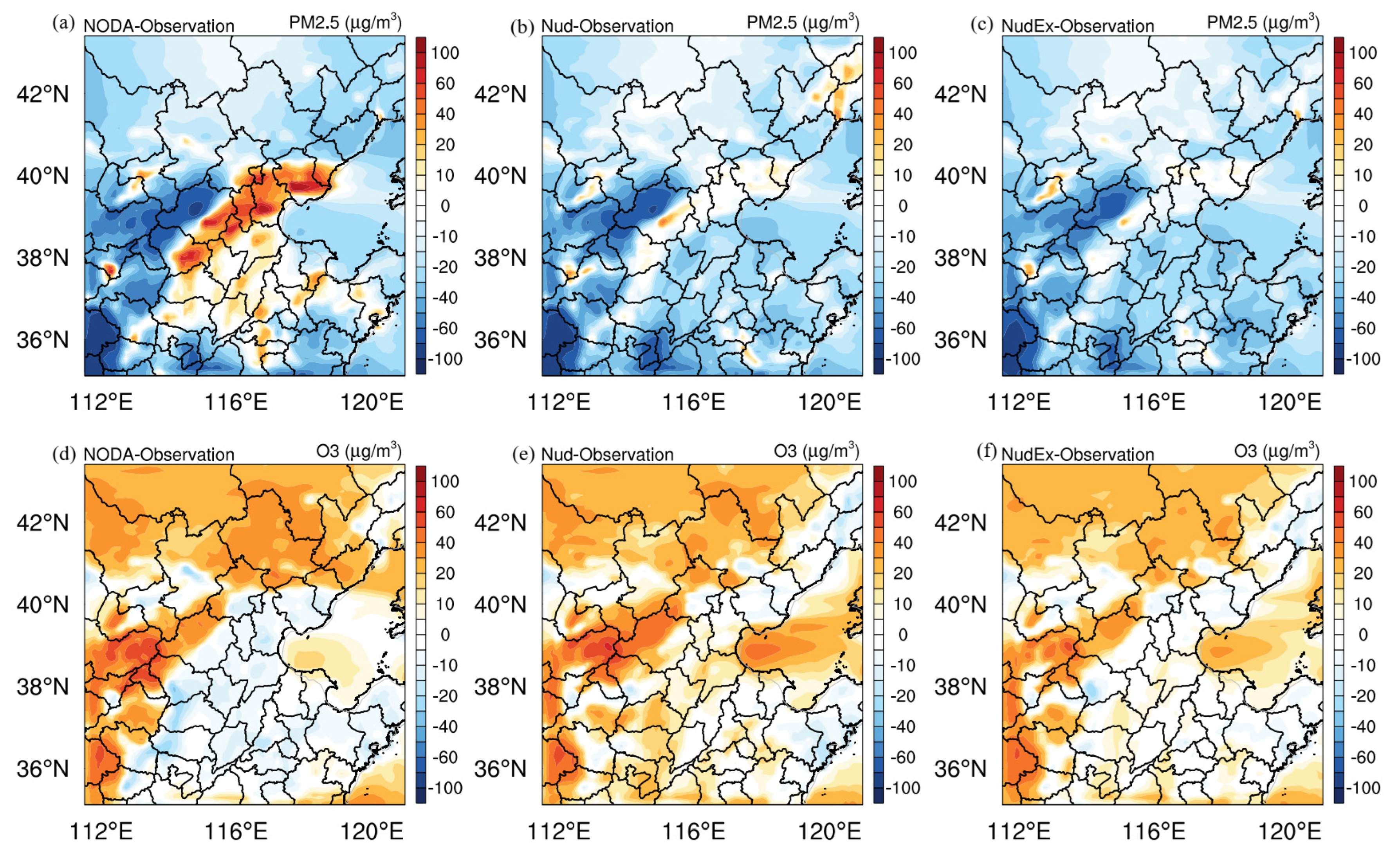
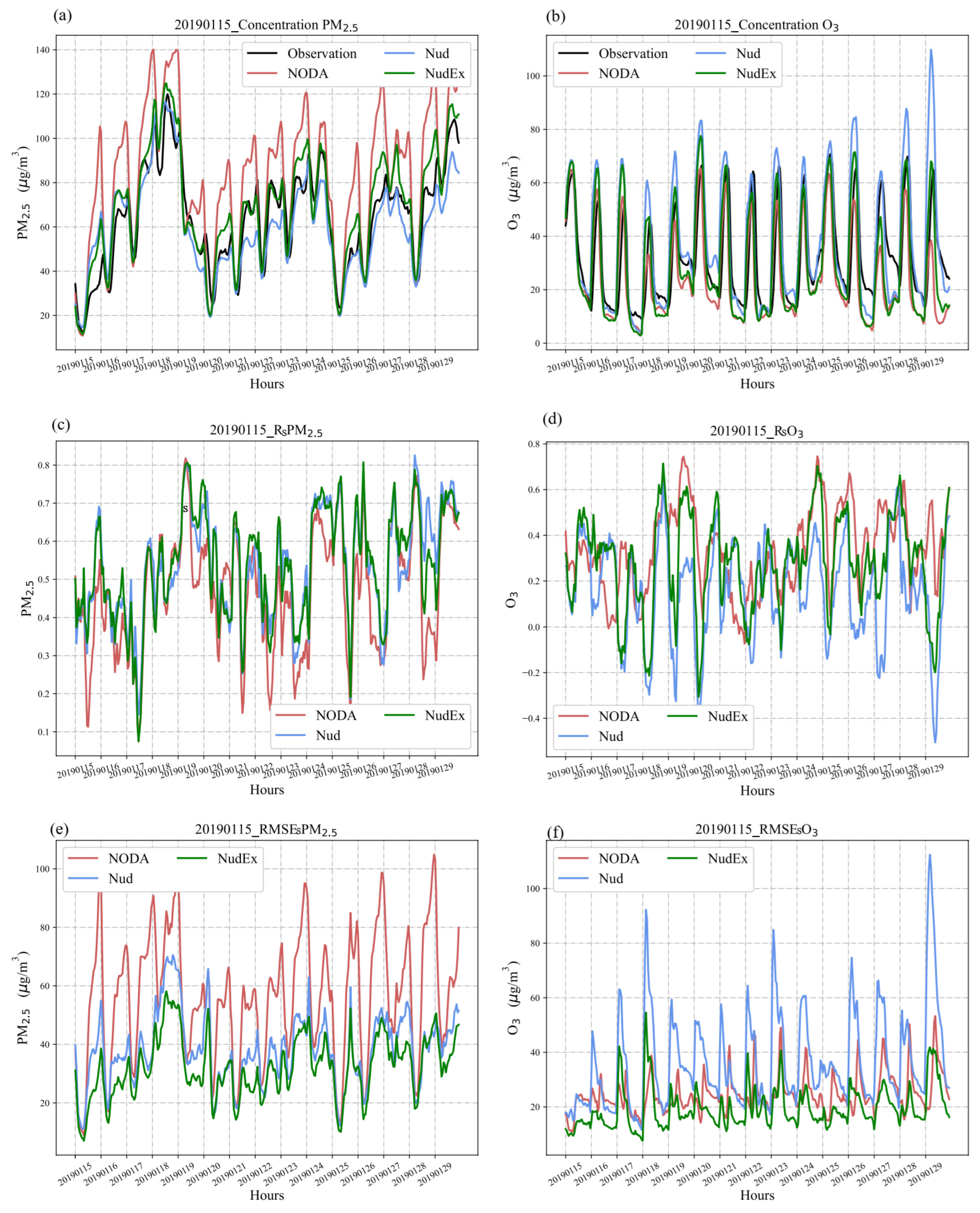
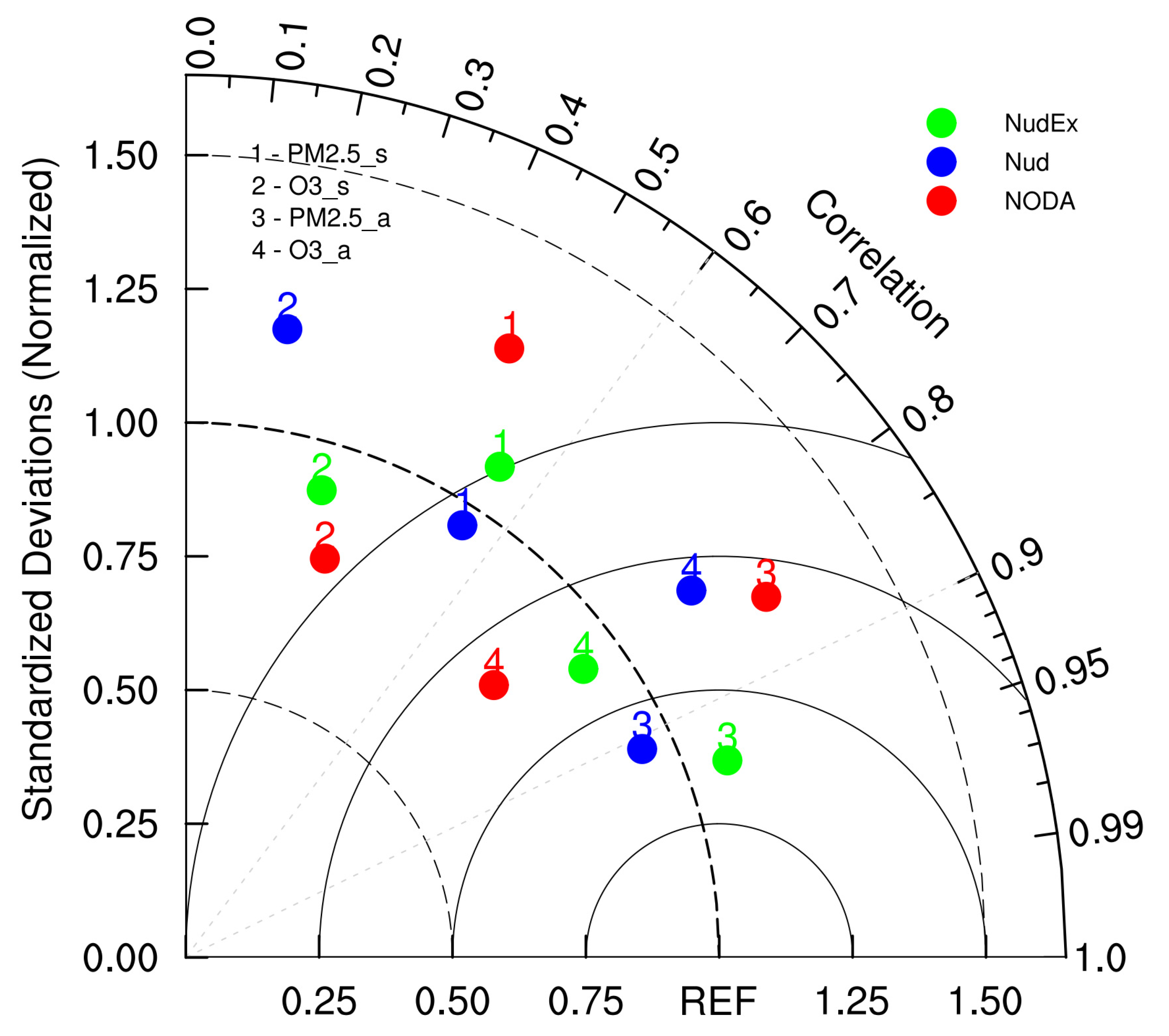
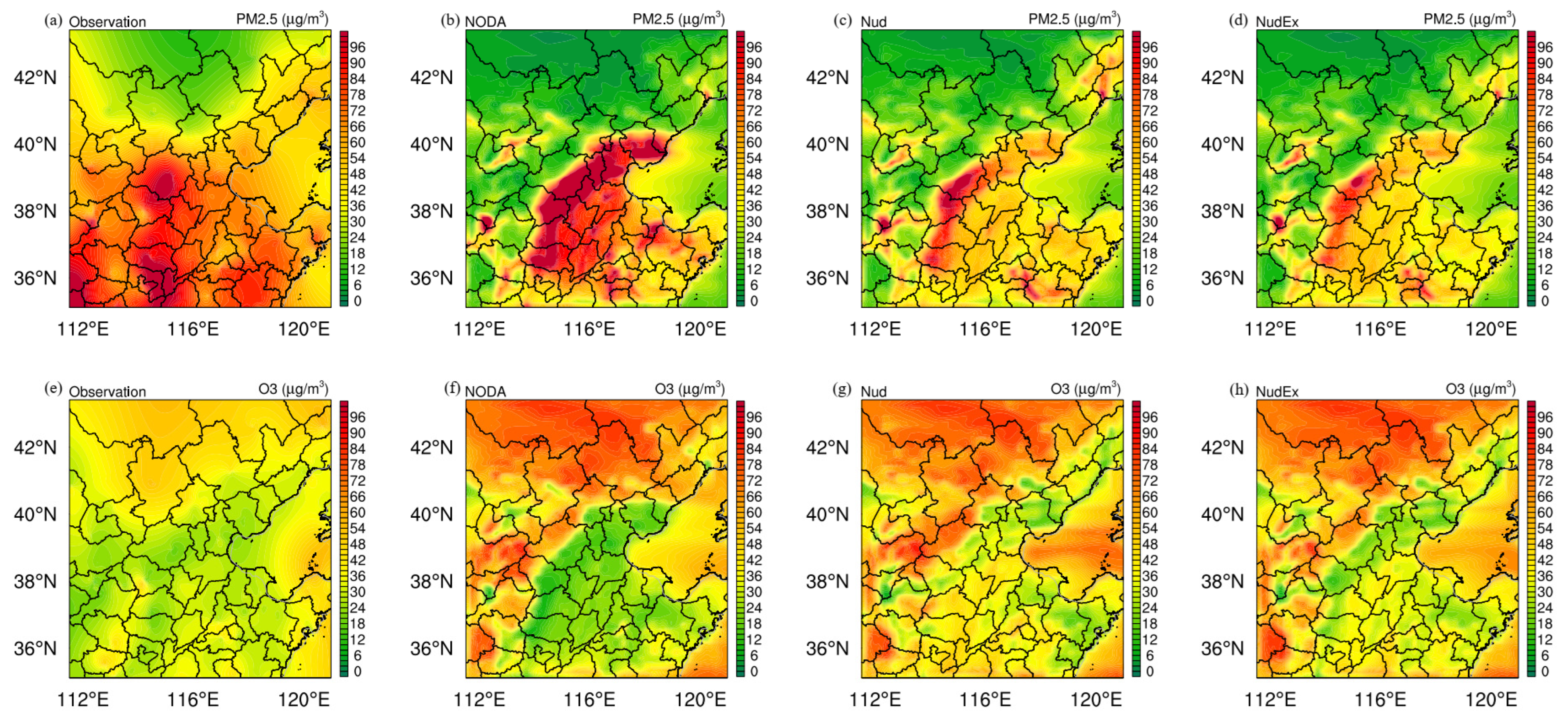
3.2. Emission Data Assimilation Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| WRFv3.7.1 | |||
|---|---|---|---|
| Simulation period | 3–30 January 2019 | ||
| Vertical resolution | 33 Vertical levels | ||
| Microphysics scheme | WSM 3-class simple ice scheme [37] | ||
| Boundary layer scheme | YSU scheme [38] | ||
| Surface layer scheme | MM5 scheme [39] | ||
| Land-surface scheme | Unified Noah land-surface model [40] | ||
| Longwave radiation scheme | rrtm scheme [41] | ||
| Shortwave radiation scheme | Dudhia scheme [42] | ||
| Grid-nudging fdda | on | ||
| Domain center | 39.1248°N, 116.5657°E | ||
| Domain id | 1 | 2 | 3 |
| Domain size | 64 × 75 | 69 × 81 | 102 × 96 |
| Starting IJ-indices from the parent domain | × | (30, 19) | (38, 23) |
| Horizontal resolution | 81 km | 27 km | 9 km |
| CMAQv5.3.2 | |||
|---|---|---|---|
| Horizontal advection | Yamo [32] | ||
| Vertical advection | WRF | ||
| Horizontal diffusion | Multiscale | ||
| Vertical diffusion | ACM2 | ||
| Deposition | M3Dry [43] | ||
| Chemistry solver | EBI | ||
| Aerosol module | AERO7 [44] | ||
| Cloud module | ACM [45] | ||
| Mechanism | cb6r3_ae7_aq [44,46] | ||
| Domain ID | 1 | 2 | 3 |
| Domain size | 62 × 73 | 67 × 79 | 100 × 94 |
References
- Ministry of Ecology and Environment, The People’s Republic of China. Circular of the State Council on Printing Out and Distribution of the National “12th Five-Year Plan” for Environmental Protection. 2011. Available online: http://english.mee.gov.cn/Resources/Plans/National_Fiveyear_Plan/201606/P020160601356854927248.pdf (accessed on 1 May 2021).
- The State Council, The People’s Republic of China. Notice of the State Council on Printing and Distributing the Three-Year Action Plan for Winning the Blue Sky Protection Campaign. 2018. Available online: http://www.gov.cn/zhengce/content/2018-07/03/content_5303158.htm (accessed on 1 May 2021).
- Ma, Z.; Xu, J.; Quan, W.; Zhang, Z.; Lin, W.; Xu, X. Significant increase of surface ozone at a rural site, north of eastern China. Atmos. Chem. Phys. 2016, 16, 3969–3977. [Google Scholar] [CrossRef] [Green Version]
- Sun, L.; Xue, L.; Wang, T.; Gao, J.; Ding, A.; Cooper, O.R.; Lin, M.; Xu, P.; Wang, Z.; Wang, X.; et al. Significant increase of summertime ozone at Mount Tai in Central Eastern China. Atmos. Chem. Phys. 2016, 16, 10637–10650. [Google Scholar] [CrossRef] [Green Version]
- Wang, T.; Wei, X.L.; Ding, A.J.; Poon, C.N.; Lam, K.S.; Li, Y.S.; Chan, L.Y.; Anson, M. Increasing surface ozone concentrations in the background atmosphere of Southern China, 1994–2007. Atmos. Chem. Phys. 2009, 9, 6217–6227. [Google Scholar] [CrossRef] [Green Version]
- Xu, W.; Lin, W.; Xu, X.; Tang, J.; Huang, J.; Wu, H.; Zhang, X. Long-term trends of surface ozone and its influencing factors at the Mt Waliguan GAW station, China—Part 1: Overall trends and characteristics. Atmos. Chem. Phys. 2016, 16, 6191. [Google Scholar] [CrossRef] [Green Version]
- Han, C.L.; Xu, R.B.; Zhang, Y.J.; Yu, W.H.; Zhang, Z.W.; Morawska, L.; Heyworth, J.; Jalaludin, B.; Morgan, G.; Marks, G.; et al. Air pollution control efficacy and health impacts: A global observational study from 2000 to 2016. Environ. Pollut. 2021, 287, 117211. [Google Scholar] [CrossRef] [PubMed]
- Hu, F.; Guo, Y. Health impacts of air pollution in China. Front. Environ. Sci. Eng. 2021, 15, 1–8. [Google Scholar] [CrossRef]
- Shen, W.T.; Yu, X.; Zhong, S.B.; Ge, H.R. Population Health Effects of Air Pollution: Fresh Evidence From China Health and Retirement Longitudinal Survey. Front. Public Health 2021, 9, 1620. [Google Scholar] [CrossRef]
- Cao, G.L.; Zhang, X.Y.; Gong, S.L.; An, X.Q.; Wang, Y.Q. Emission inventories of primary particles and pollutant gases for China. Chin. Sci. Bull. 2011, 56, 781–788. [Google Scholar] [CrossRef] [Green Version]
- Streets, D.G.; Bond, T.C.; Carmichael, G.R.; Fernandes, S.D.; Fu, Q.; He, D.; Klimont, Z.; Nelson, S.M.; Tsai, N.Y.; Wang, M.Q.; et al. An inventory of gaseous and primary aerosol emissions in Asia in the year 2000. J. Geophys. Res.-Atmos. 2003, 108. [Google Scholar] [CrossRef]
- Zhang, Q.; Streets, D.G.; Carmichael, G.R.; He, K.B.; Huo, H.; Kannari, A.; Klimont, Z.; Park, I.S.; Reddy, S.; Fu, J.S.; et al. Asian emissions in 2006 for the NASA INTEX-B mission. Atmos. Chem. Phys. 2009, 9, 5131–5153. [Google Scholar] [CrossRef] [Green Version]
- Zhao, B.; Wang, P.; Ma, J.Z.; Zhu, S.; Pozzer, A.; Li, W. A high-resolution emission inventory of primary pollutants for the Huabei region, China. Atmos. Chem. Phys. 2012, 12, 481–501. [Google Scholar] [CrossRef] [Green Version]
- Kasibhatla, P.; Arellano, A.; Logan, J.A.; Palmer, P.I.; Novelli, P. Top-down estimate of a large source of atmospheric carbon monoxide associated with fuel combustion in Asia. Geophys. Res. Lett. 2002, 29, 6-1. [Google Scholar] [CrossRef] [Green Version]
- Mo, Z.; Shao, M.; Liu, Y.; Xiang, Y.; Wang, M.; Lu, S.; Ou, J.; Zheng, J.; Li, M.; Zhang, Q.; et al. Species-specified VOC emissions derived from a gridded study in the Pearl River Delta, China. Sci. Rep. 2018, 8, 2963. [Google Scholar] [CrossRef] [Green Version]
- Trombetti, M.; Thunis, P.; Bessagnet, B.; Clappier, A.; Couvidat, F.; Guevara, M.; Kuenen, J.; López-Aparicio, S. Spatial inter-comparison of Top-down emission inventories in European urban areas. Atmos. Environ. 2018, 173, 142–156. [Google Scholar] [CrossRef]
- Van Vuuren, D.P.; Hoogwijk, M.; Barker, T.; Riahi, K.; Boeters, S.; Chateau, J.; Scrieciu, S.; van Vliet, J.; Masui, T.; Blok, K.; et al. Comparison of top-down and bottom-up estimates of sectoral and regional greenhouse gas emission reduction potentials. Energy Policy 2009, 37, 5125–5139. [Google Scholar] [CrossRef]
- Cheng, X.H.; Xu, X.D.; Ding, G.A. An emission source inversion model based on satellite data and its application in air quality forecasts. Sci. China-Earth Sci. 2010, 53, 752–762. [Google Scholar] [CrossRef]
- Xu, X.D.; Xie, L.; Cheng, X.H.; Xu, J.M.; Zhou, X.J.; Ding, G.A. Application of an adaptive nudging scheme in air quality forecasting in China. J. Appl. Meteorol. Climatol. 2008, 47, 2105–2114. [Google Scholar] [CrossRef]
- Tang, X.; Zhu, J.; Wang, Z.; Gbaguidi, A.; Lin, C.; Xin, J.; Song, T.; Hu, B. Limitations of ozone data assimilation with adjustment of NOx emissions: Mixed effects on NO2 forecasts over Beijing and surrounding areas. Atmos. Chem. Phys. 2016, 16, 6395–6405. [Google Scholar] [CrossRef] [Green Version]
- Mizzi, A.P.; Arellano, A.F.; Edwards, D.P.; Anderson, J.L.; Pfister, G.G. Assimilating compact phase space retrievals of atmospheric composition with WRF-Chem/DART: A regional chemical transport/ensemble Kalman filter data assimilation system. Geosci. Model Dev. 2016, 9, 965–978. [Google Scholar] [CrossRef] [Green Version]
- Peng, Z.; Lei, L.; Liu, Z.; Sun, J.; Ding, A.; Ban, J.; Chen, D.; Kou, X.; Chu, K. The impact of multi-species surface chemical observation assimilation on air quality forecasts in China. Atmos. Chem. Phys. 2018, 18, 17387–17404. [Google Scholar] [CrossRef] [Green Version]
- Ma, C.; Wang, T.; Jiang, Z.; Wu, H.; Zhao, M.; Zhuang, B.; Li, S.; Xie, M.; Li, M.; Liu, J.; et al. Importance of bias correction in data assimilation of multiple observations over eastern China using WRF-Chem/DART. J. Geophys. Res. Atmos. 2020, 125, e2019JD031465. [Google Scholar] [CrossRef]
- Ma, C.; Wang, T.; Mizzi, A.P.; Anderson, J.L.; Zhuang, B.; Xie, M.; Wu, R. Multiconstituent Data Assimilation With WRFChem/DART: Potential for Adjusting Anthropogenic Emissions and Improving Air Quality Forecasts Over Eastern China. J. Geophys. Res. Atmos. 2019, 124, 7393–7412. [Google Scholar] [CrossRef]
- Eslami, E.; Salman, A.K.; Choi, Y.; Sayeed, A.; Lops, Y. A data ensemble approach for real-time air quality forecasting using extremely randomized trees and deep neural networks. Neural Comput. Appl. 2020, 32, 7563–7579. [Google Scholar] [CrossRef]
- Tang, M.Z.; Chen, Y.T.; Wu, H.W.; Zhao, Q.; Long, W.; Sheng, V.S.; Yi, J.B. Cost-Sensitive Extremely Randomized Trees Algorithm for Online Fault Detection of Wind Turbine Generators. Front. Energy Res. 2021, 9, 234. [Google Scholar] [CrossRef]
- Xia, B.; Zhang, H.; Li, Q.M.; Li, T. PETs: A Stable and Accurate Predictor of Protein-Protein Interacting Sites Based on Extremely-Randomized Trees. IEEE Trans. Nanobiosci. 2015, 14, 882–893. [Google Scholar] [CrossRef]
- Huang, C.W.; Chen, B.Z.; Ma, C.Q.; Wang, T.J. WRF-CMAQ-MOS studies based on extremely randomized trees. Acta Meterologica Sin. 2018, 76, 779–789. [Google Scholar] [CrossRef]
- National Centers for Environmental Prediction; National Weather Service; NOAA; U.S. Department of Commerce. NCEP FNL Operational Model Global Tropospheric Analyses, Continuing from July 1999; Updated Daily; Research Data Archive at the National Center for Atmospheric Research, Computational and Information Systems Laboratory; National Centers for Environmental Prediction: College Park, MD, USA, 2000. [Google Scholar] [CrossRef]
- Skamarock, W.C.; Klemp, J.B.; Dudhia, J.; Gill, D.O.; Barker, D.M.; Duda, M.G.; Huang, X.-Y.; Wang, W.; Powers, J.G. A Description of the Advanced Research WRF Version 3; NCAR Tech.: Boulder, CO, USA, 2008. [Google Scholar] [CrossRef]
- Chen SY, S.; Price, J.F.; Zhao, W.; Donelan, M.A.; Walsh, E.J. The CBLAST-hurricane program and the next-generation fully coupled atmosphere-wave-ocean. Models for hurricane research and prediction. Bull. Am. Meteorol. Soc. 2007, 88, 311–317. [Google Scholar] [CrossRef]
- Byun, D.; Schere, K.L. Review of the governing equations, computational algorithms, and other components of the models-3 Community Multiscale Air Quality (CMAQ) modeling system. Appl. Mech. Rev. 2006, 59, 51–77. [Google Scholar] [CrossRef]
- United States Environmental Protection Agency. CMAQ (Version 5.3.2) [Software]; United States Environmental Protection Agency: Washington, DC, USA, 2020. [Google Scholar] [CrossRef]
- Hoke, J.E.; Anthes, R.A. The initialization of numerical models by a dynamic-initialization technique. Mon. Weather Rev. 1976, 104, 1551–1556. [Google Scholar] [CrossRef]
- Geurts, P.; Ernst, D.; Wehenkel, L. Extremely randomized trees. Mach. Learn. 2006, 63, 3–42. [Google Scholar] [CrossRef] [Green Version]
- Sarwar, G.; Luecken, D.; Yarwood, G.; Whitten, G.Z.; Carter, W.P.L. Impact of an updated carbon bond mechanism on predictions from the CMAQ modeling system: Preliminary assessment. J. Appl. Meteorol. Climatol. 2008, 47, 3–14. [Google Scholar] [CrossRef]
- Hong, S.Y.; Dudhia, J.; Chen, S.H. A Revised Approach to Ice Microphysical Processes for the Bulk Parameterization of Clouds and Precipitation. Mon. Weather Rev. 2004, 132, 103–120. [Google Scholar] [CrossRef]
- Hong, S.Y.; Noh, Y.; Dudhia, J. A new vertical diffusion package with an explicit treatment of entrainment processes. Mon. Weather Rev. 2006, 134, 2318–2341. [Google Scholar] [CrossRef] [Green Version]
- Paulson, C.A. The mathematical representation of wind speed and temperature profiles in the unstable atmospheric surface layer. J. Appl. Meteorol. 1970, 9, 857–861. [Google Scholar] [CrossRef]
- Chen, F.; Dudhia, J. Coupling an advanced land-surface/hydrology model with the Penn State/NCAR MM5 modeling system. Part I: Model description and implementation. Mon. Weather Rev. 2001, 129, 569–585. [Google Scholar] [CrossRef]
- Mlawer, E.J.; Taubman, S.J.; Brown, P.D.; Iacono, M.J.; Clough, S.A. Radiative transfer for inhomogeneous atmosphere: RRTM, a validated correlated-k model for the longwave. J. Geophys. Res. 1997, 102, 16663–16682. [Google Scholar] [CrossRef] [Green Version]
- Dudhia, J. Numerical study of convection observed during the winter monsoon experiment using a mesoscale two-dimensional model. J. Atmos. Sci. 1989, 46, 3077–3107. [Google Scholar] [CrossRef]
- Shu, Q.; Murphy, B.N.; Schwede, D.; Henderson, B.H.; Pye HO, T.; Appel, K.W.; Khan, T.R.; Perlinger, J.A. Improving the particle dry deposition scheme in the CMAQ photochemical modeling system. Atmos. Environ. 2022, 289, 119343. [Google Scholar] [CrossRef]
- Xu, L.; Pye HO, T.; He, J.; Chen, Y.L.; Murphy, B.N.; Ng, N.L. Experimental and model estimates of the contributions from biogenic monoterpenes and sesquiterpenes to secondary organic aerosol in the southeastern United States. Atmos. Chem. Phys. 2018, 18, 12613–12637. [Google Scholar] [CrossRef] [Green Version]
- Fahey, K.M.; Carlton, A.G.; Pye, H.O.T.; Baek, J.; Hutzell, W.T.; Stanier, C.O.; Baker, K.R.; Appel, K.W.; Jaoui, M.; Offenberg, J.H. A framework for expanding aqueous chemistry in the Community Multiscale Air Quality (CMAQ) model version 5.1. Geosci. Model Dev. 2017, 10, 1587–1605. [Google Scholar] [CrossRef] [Green Version]
- Luecken, D.J.; Yarwood, G.; Hutzell, W.H. Multipollutant of ozone, reactive nitrogen and HAPs across the continental US with CMAQ-CB6. Atmos. Environ. 2019, 201, 62–72. [Google Scholar] [CrossRef] [PubMed]








| PM2.5 | O3 | |||||
|---|---|---|---|---|---|---|
| NODA | Nud | NudEx | NODA | Nud | NudEx | |
| 0.47 | 0.54 | 0.54 | 0.33 | 0.16 | 0.28 | |
(µg/m3) | 56.44 | 38.23 | 32.2 | 24.6 | 36.61 | 19.51 |
| 29% | −4% | 9% | −21% | 19% | −9% | |
| 67% | 44% | 47% | 72% | 92% | 74% | |
| 0.85 | 0.91 | 0.94 | 0.75 | 0.81 | 0.81 | |
(µg/m3) | 24.41 | 10.59 | 9.97 | 13.91 | 14.86 | 12.07 |
| 28% | −6% | 8% | −23% | 17% | −8% | |
| 32% | 13% | 13% | 33% | 31% | 31% | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, C.; Niu, T.; Wu, H.; Qu, Y.; Wang, T.; Li, M.; Li, R.; Liu, H. A Data Assimilation Method Combined with Machine Learning and Its Application to Anthropogenic Emission Adjustment in CMAQ. Remote Sens. 2023, 15, 1711. https://doi.org/10.3390/rs15061711
Huang C, Niu T, Wu H, Qu Y, Wang T, Li M, Li R, Liu H. A Data Assimilation Method Combined with Machine Learning and Its Application to Anthropogenic Emission Adjustment in CMAQ. Remote Sensing. 2023; 15(6):1711. https://doi.org/10.3390/rs15061711
Chicago/Turabian StyleHuang, Congwu, Tao Niu, Hao Wu, Yawei Qu, Tijian Wang, Mengmeng Li, Rong Li, and Hongli Liu. 2023. "A Data Assimilation Method Combined with Machine Learning and Its Application to Anthropogenic Emission Adjustment in CMAQ" Remote Sensing 15, no. 6: 1711. https://doi.org/10.3390/rs15061711