
Evaluation and Error Decomposition of IMERG Product Based on Multiple Satellite Sensors


Abstract
:1. Introduction
2. Study Area and Data
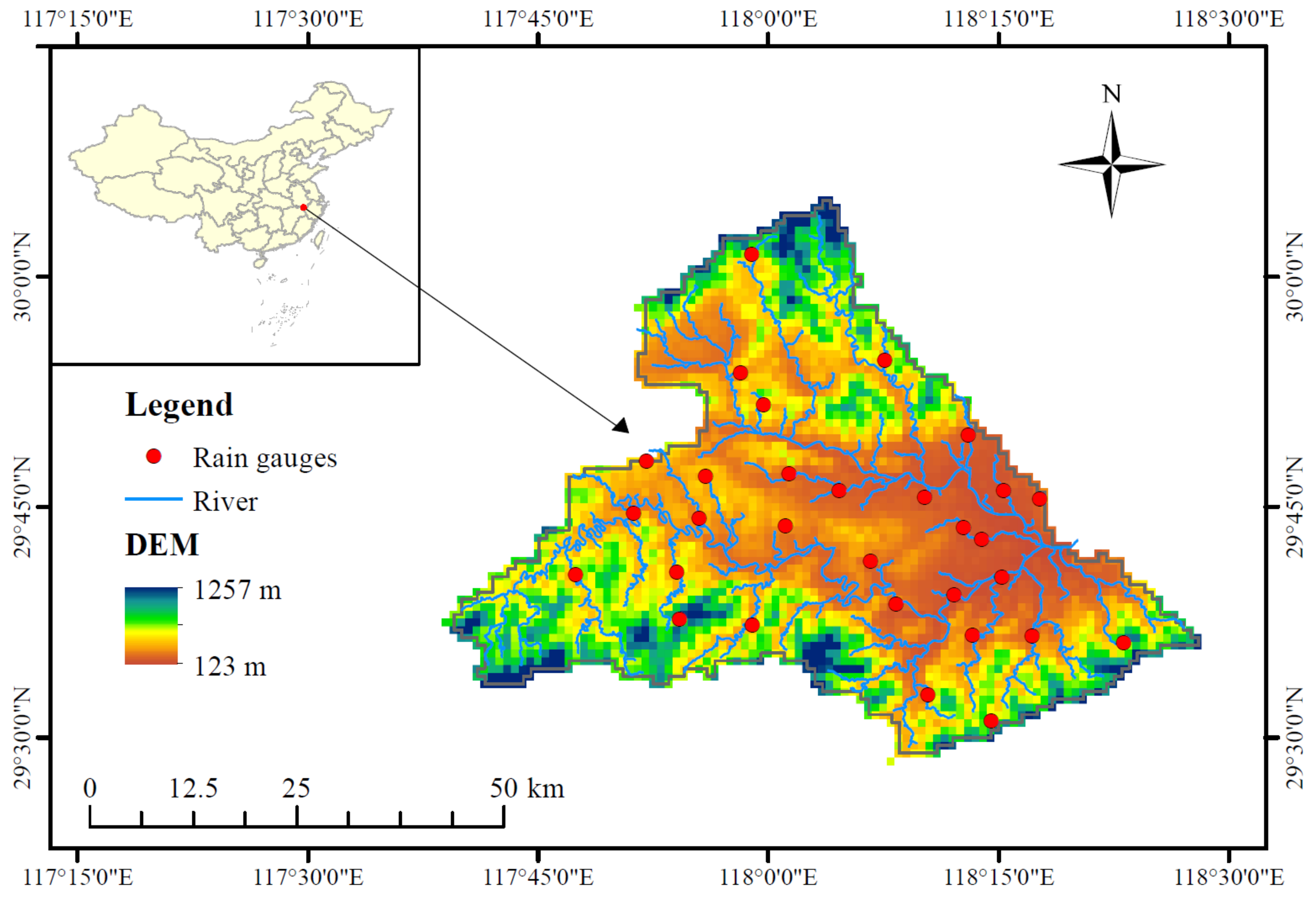
2.1. Study Area
2.2. Data
2.2.1. Rain Gauge Data
2.2.2. IMERG Dataset
3. Methodology
3.1. Evaluation of Detection Capability
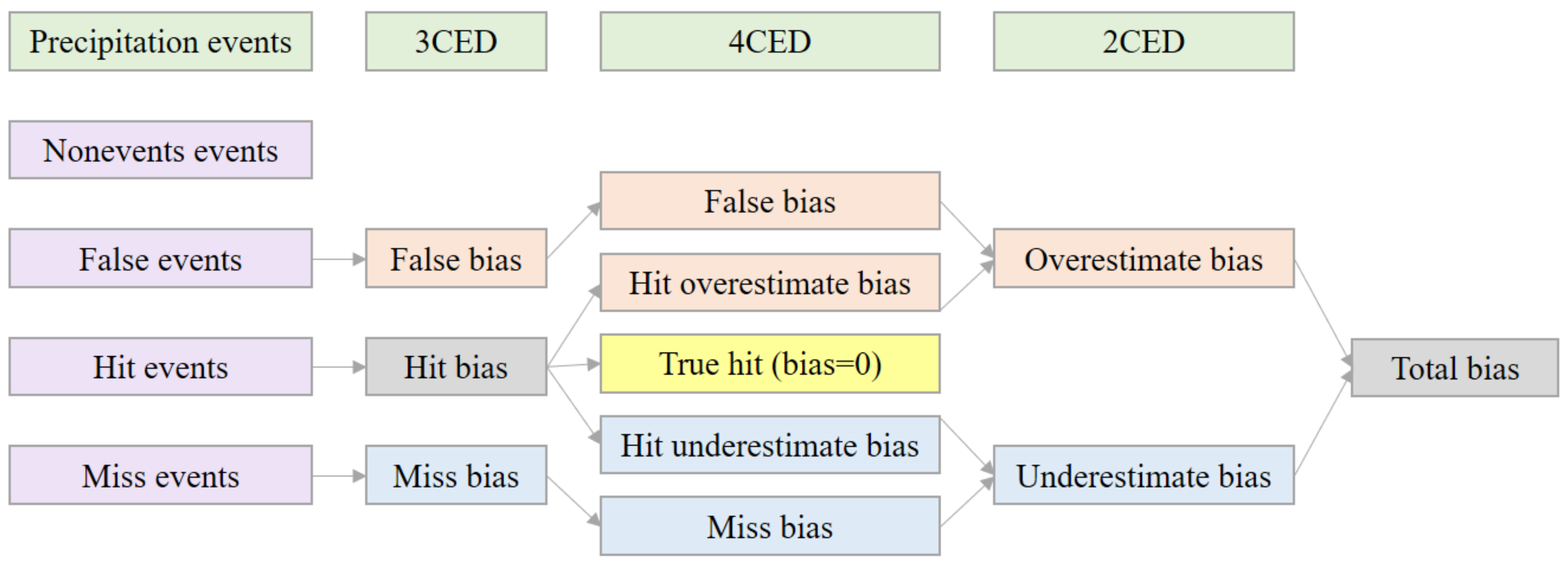
3.2. Four-Component Error Decomposition Method
3.3. Systematic and Random Error Decomposition
4. Results
4.1. General Analysis
4.2. Detectability Performance
4.3. Four-Component Error Decomposition Results
4.4. Systematic and Random Error Decomposition
5. Discussion
5.1. Error Decomposition
5.2. Error Source Analysis
5.3. Uncertainty of Gauge Observation
6. Conclusions
- (1)
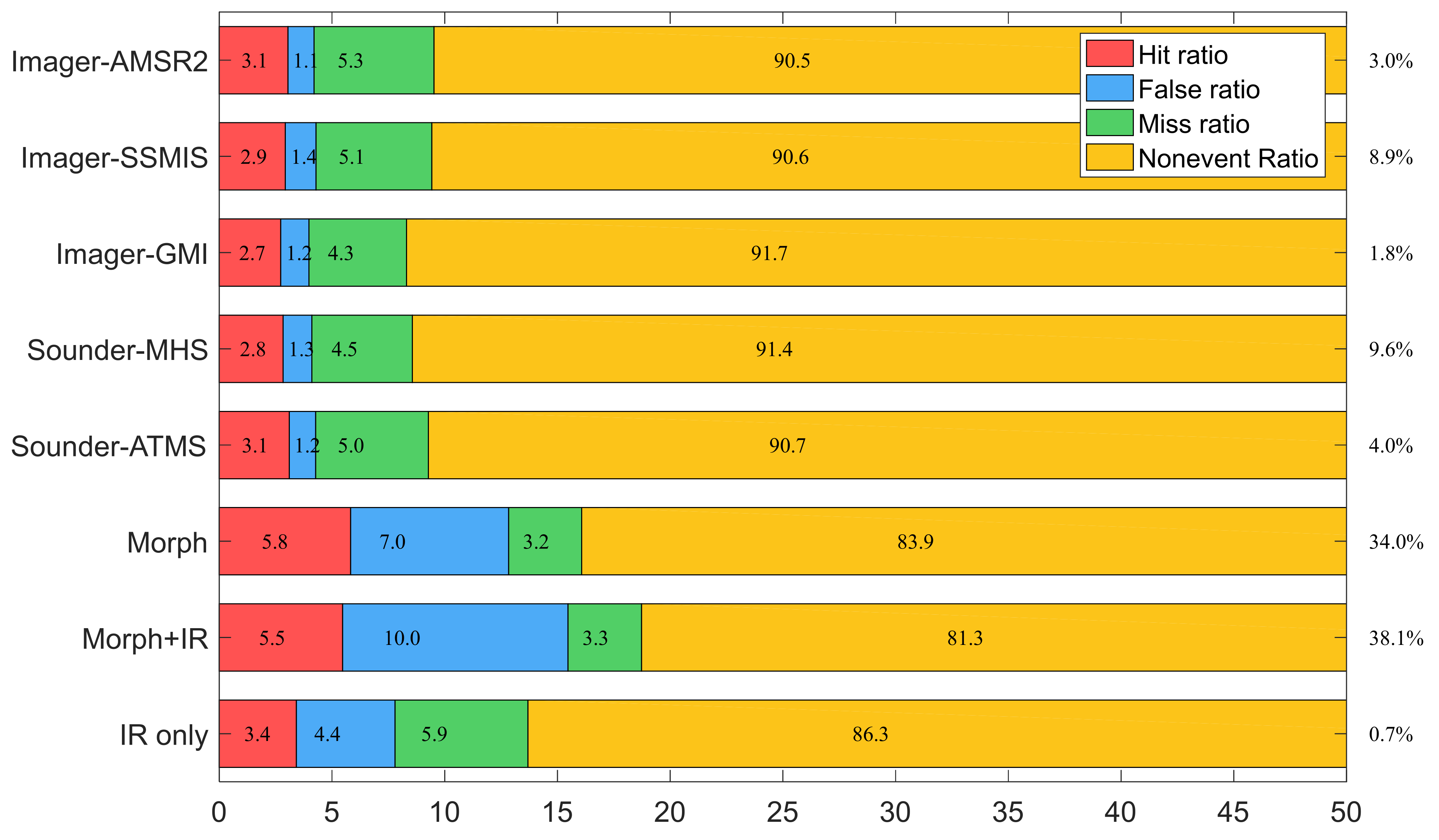
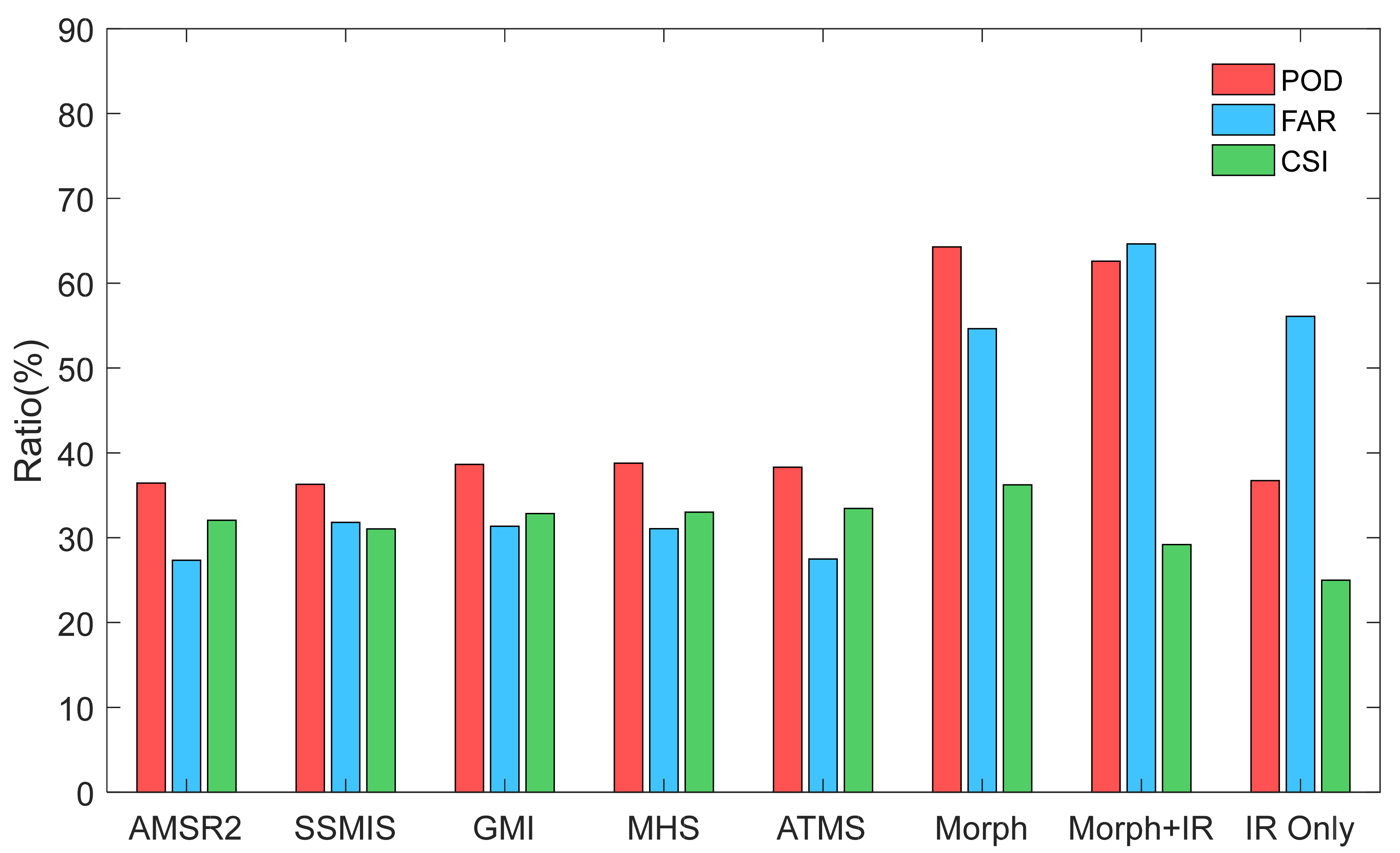
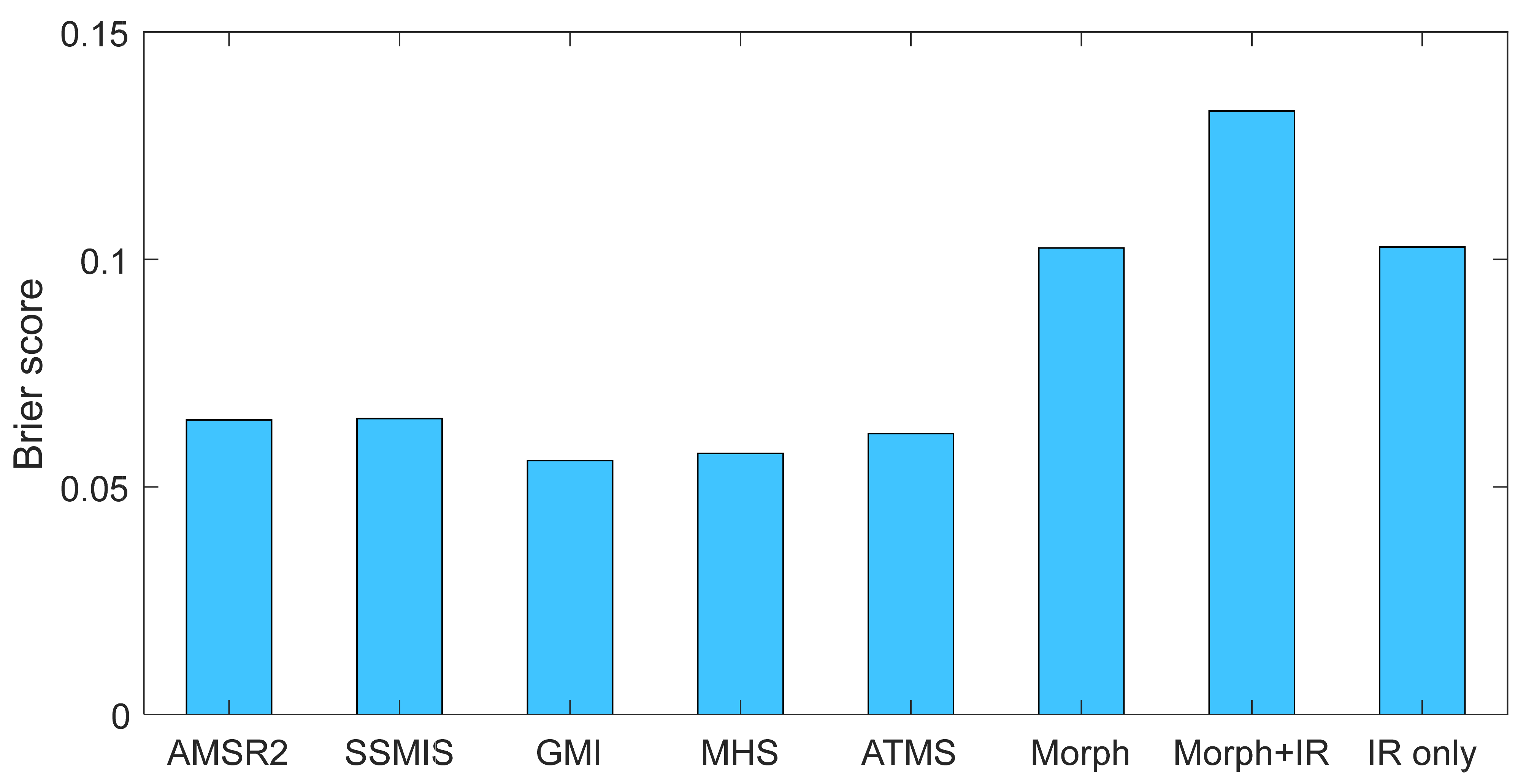
- For detectability, the sample ratio for IR (Morph, IR + Morph, and IR only) is much higher than for PMW (AMSR2, SSMIS, GMI, MHS, and ATMS). The IR sensor has a high HR, FR, POD, and FAR, indicating that IR is sensitive to light precipitation events and tends to predict a false signal for the satellite estimate. The poor performance of CSI and BS for IR sensors is mainly due to the high false ratio.
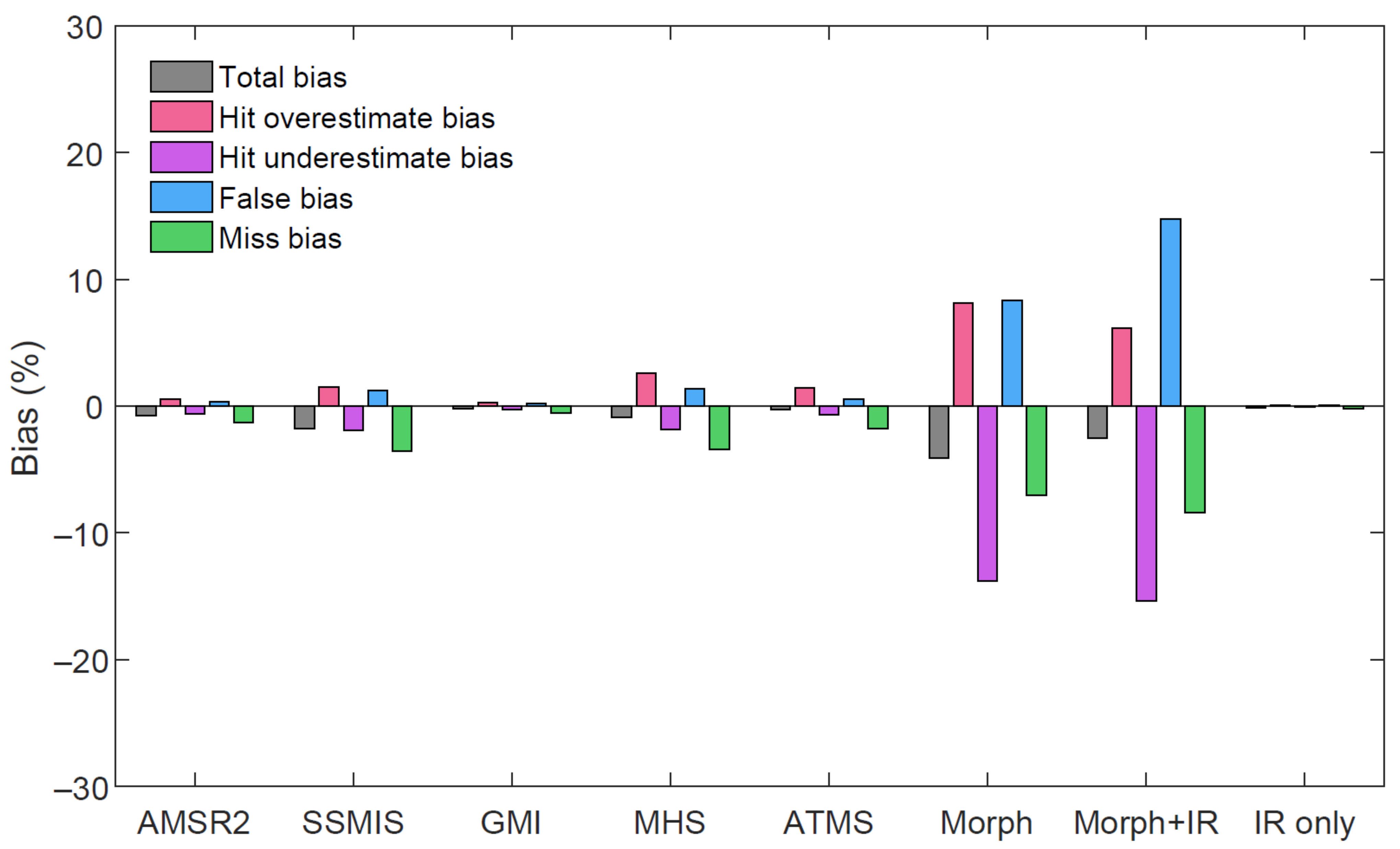
- (2)
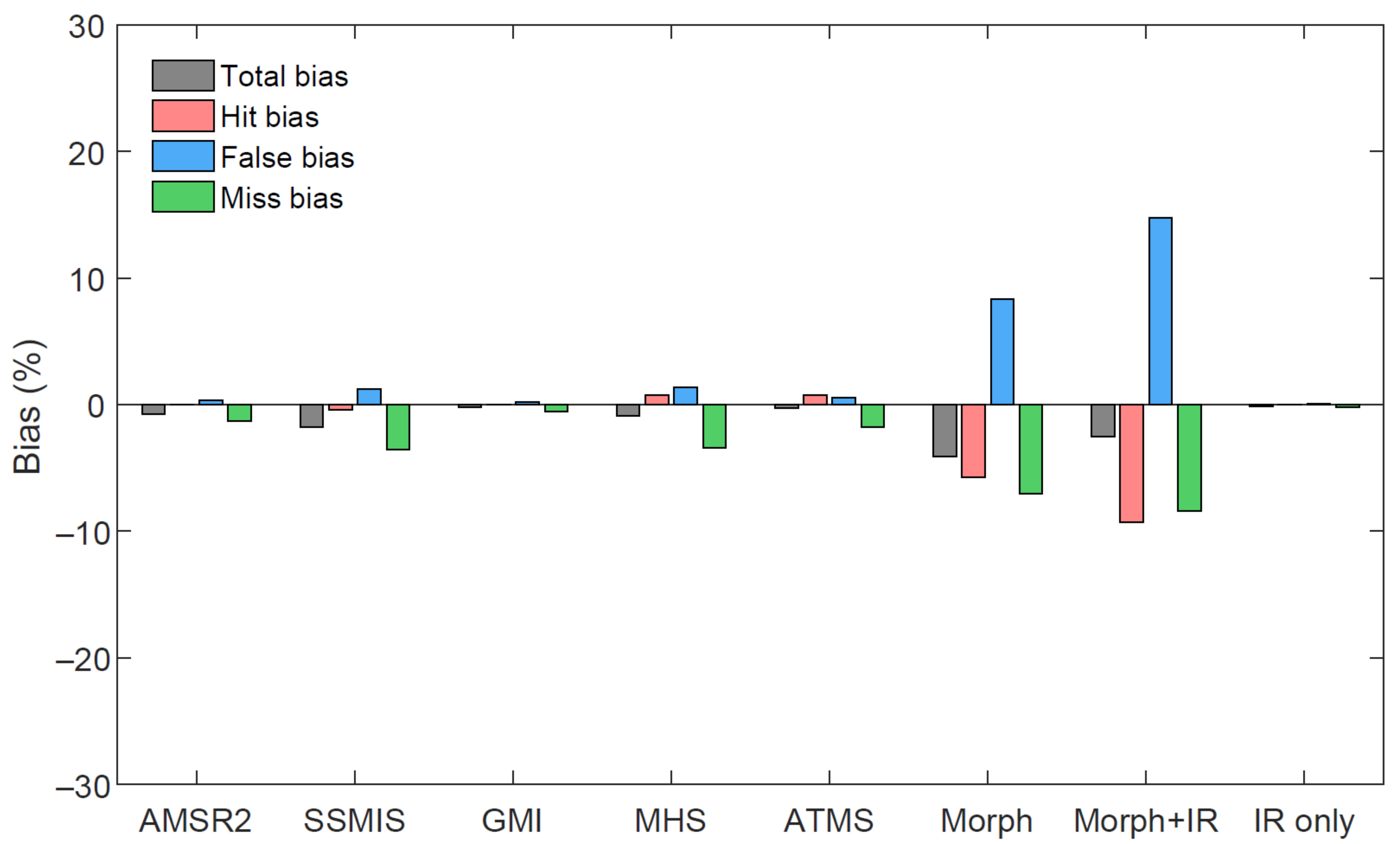
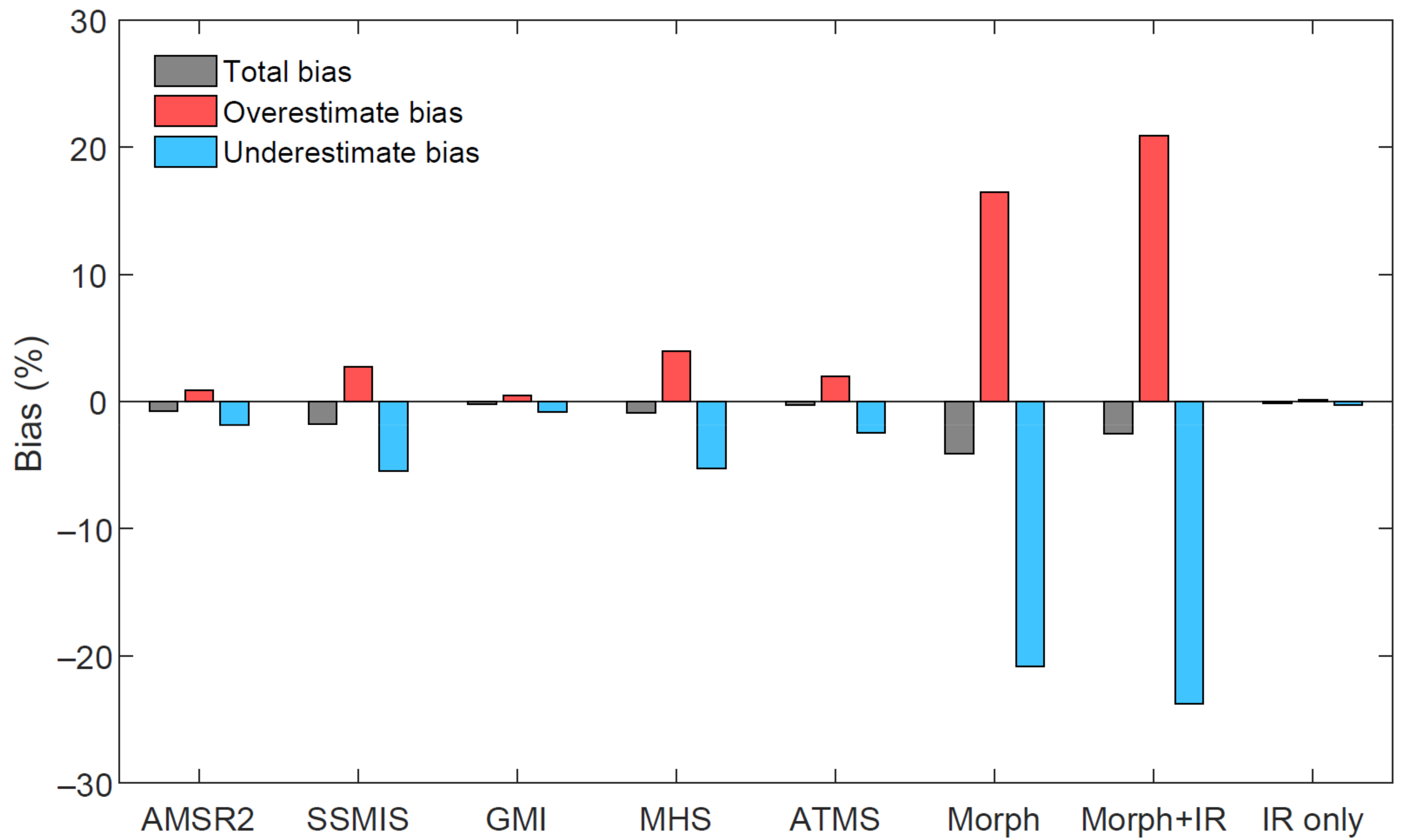
- Based on the 4CED, the TB can be decomposed into HOB, HUB, FB, and MB. HOB and FB are always positive among the four error components, while HUB and MB are always negative. The magnitude of HOB and |HUB| is higher than |HB| because of the unavoidable cancellation during the HB calculations process. Generally, the TB for all sensors is negative, meaning that all the sensors underestimate precipitation. Morph and Morph + IR have considerable bias related to the prediction ability and the sample size. It is crucial to reduce the FR to improve the detectability of IR sensors due to their high sample size.
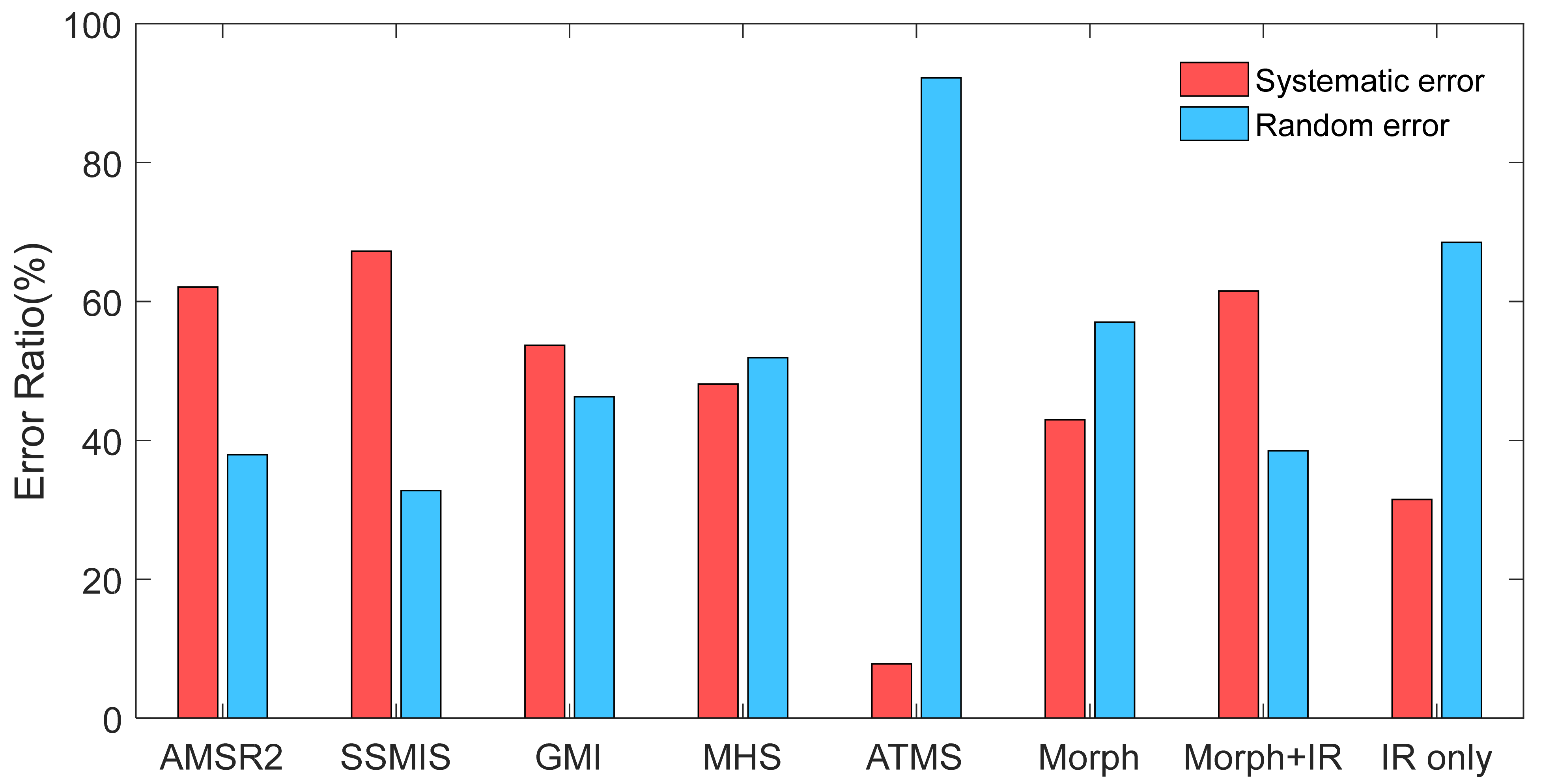
- (3)
- The systematic and random error components were assessed using the additive error model. Systematic error is the prominent component for AMSR2, SSMIS, GMI, and Morph + IR, indicating that the retrieval algorithm for these sensors needs further improvement.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sun, Q.; Miao, C.; Duan, Q.; Ashouri, H.; Sorooshian, S.; Hsu, K.L. A review of global precipitation data sets: Data sources, estimation, and intercomparisons. Rev. Geophys. 2018, 56, 79–107. [Google Scholar] [CrossRef] [Green Version]
- Tang, G.; Ma, Y.; Long, D.; Zhong, L.; Hong, Y. Evaluation of GPM Day-1 IMERG and TMPA Version-7 legacy products over Mainland China at multiple spatiotemporal scales. J. Hydrol. 2016, 533, 152–167. [Google Scholar] [CrossRef]
- Kidd, C.; Huffman, G. Global precipitation measurement. Meteorol. Appl. 2011, 18, 334–353. [Google Scholar] [CrossRef]
- Lei, H.; Zhao, H.; Ao, T. Ground validation and error decomposition for six state-of-the-art satellite precipitation products over mainland China. Atmos. Res. 2022, 269, 106017. [Google Scholar] [CrossRef]
- Liu, C.-Y.; Aryastana, P.; Liu, G.-R.; Huang, W.-R. Assessment of satellite precipitation product estimates over Bali Island. Atmos. Res. 2020, 244, 105032. [Google Scholar] [CrossRef]
- Derin, Y.; Kirstetter, P.-E.; Gourley, J.J. Evaluation of IMERG Satellite Precipitation over the Land–Coast–Ocean Continuum. Part I: Detection. J. Hydrometeorol. 2021, 22, 2843–2859. [Google Scholar] [CrossRef]
- Kirstetter, P.E.; Karbalaee, N.; Hsu, K.; Hong, Y. Probabilistic precipitation rate estimates with space-based infrared sensors. Q. J. R. Meteorol. Soc. 2018, 144, 191–205. [Google Scholar] [CrossRef] [Green Version]
- Maggioni, V.; Massari, C. On the performance of satellite precipitation products in riverine flood modeling: A review. J. Hydrol. 2018, 558, 214–224. [Google Scholar] [CrossRef]
- Huffman, G.J.; Bolvin, D.T.; Nelkin, E.J.; Wolff, D.B.; Adler, R.F.; Gu, G.; Hong, Y.; Bowman, K.P.; Stocker, E.F. The TRMM Multisatellite Precipitation Analysis (TMPA): Quasi-Global, Multiyear, Combined-Sensor Precipitation Estimates at Fine Scales. J. Hydrometeorol. 2007, 8, 38–55. [Google Scholar] [CrossRef]
- Maggioni, V.; Meyers, P.C.; Robinson, M.D. A Review of Merged High-Resolution Satellite Precipitation Product Accuracy during the Tropical Rainfall Measuring Mission (TRMM) Era. J. Hydrometeorol. 2016, 17, 1101–1117. [Google Scholar] [CrossRef]
- Pradhan, R.K.; Markonis, Y.; Vargas Godoy, M.R.; Villalba-Pradas, A.; Andreadis, K.M.; Nikolopoulos, E.I.; Papalexiou, S.M.; Rahim, A.; Tapiador, F.J.; Hanel, M. Review of GPM IMERG performance: A global perspective. Remote Sens. Environ. 2022, 268, 112754. [Google Scholar] [CrossRef]
- Sapiano, M.; Arkin, P. An intercomparison and validation of high-resolution satellite precipitation estimates with 3-hourly gauge data. J. Hydrometeorol. 2009, 10, 149–166. [Google Scholar] [CrossRef]
- Ayat, H.; Evans, J.P.; Behrangi, A. How do different sensors impact IMERG precipitation estimates during hurricane days? Remote Sens. Environ. 2021, 259, 112417. [Google Scholar] [CrossRef]
- Zhu, Z.; Yong, B.; Ke, L.; Wang, G.; Ren, L.; Chen, X. Tracing the error sources of global satellite mapping of precipitation for GPM (GPM-GSMaP) over the Tibetan Plateau, China. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 2181–2191. [Google Scholar] [CrossRef]
- Hsu, K.-l.; Gao, X.; Sorooshian, S.; Gupta, H.V. Precipitation estimation from remotely sensed information using artificial neural networks. J. Appl. Meteorol. 1997, 36, 1176–1190. [Google Scholar] [CrossRef]
- Joyce, R.J.; Janowiak, J.E.; Arkin, P.A.; Xie, P. CMORPH: A method that produces global precipitation estimates from passive microwave and infrared data at high spatial and temporal resolution. J. Hydrometeorol. 2004, 5, 487–503. [Google Scholar] [CrossRef]
- Ushio, T.; Sasashige, K.; Kubota, T.; Shige, S.; Okamoto, K.i.; Aonashi, K.; Inoue, T.; Takahashi, N.; Iguchi, T.; Kachi, M. A Kalman filter approach to the Global Satellite Mapping of Precipitation (GSMaP) from combined passive microwave and infrared radiometric data. J. Meteorol. Soc. Japan. Ser. II 2009, 87, 137–151. [Google Scholar] [CrossRef] [Green Version]
- Sorooshian, S.; Hsu, K.-L.; Gao, X.; Gupta, H.V.; Imam, B.; Braithwaite, D. Evaluation of PERSIANN system satellite-based estimates of tropical rainfall. Bull. Am. Meteorol. Soc. 2000, 81, 2035–2046. [Google Scholar] [CrossRef]
- Alijanian, M.; Rakhshandehroo, G.R.; Mishra, A.; Dehghani, M. Evaluation of remotely sensed precipitation estimates using PERSIANN-CDR and MSWEP for spatio-temporal drought assessment over Iran. J. Hydrol. 2019, 579, 124189. [Google Scholar] [CrossRef]
- Tian, Y.; Peters-Lidard, C.D.; Eylander, J.B.; Joyce, R.J.; Huffman, G.J.; Adler, R.F.; Hsu, K.l.; Turk, F.J.; Garcia, M.; Zeng, J. Component analysis of errors in satellite-based precipitation estimates. J. Geophys. Res. Atmos. 2009, 114, D24101. [Google Scholar] [CrossRef] [Green Version]
- Chaudhary, S.; Dhanya, C.T. An improved error decomposition scheme for satellite-based precipitation products. J. Hydrol. 2021, 598, 126434. [Google Scholar] [CrossRef]
- Zhang, Y.; Ye, A.; Nguyen, P.; Analui, B.; Sorooshian, S.; Hsu, K. New insights into error decomposition for precipitation products. Geophys. Res. Lett. 2021, 48, e2021GL094092. [Google Scholar] [CrossRef]
- Ma, Y.Z.; Hong, Y.; Chen, Y.; Yang, Y.; Tang, G.Q.; Yao, Y.J.; Long, D.; Li, C.M.; Han, Z.Y.; Liu, R.H. Performance of Optimally Merged Multisatellite Precipitation Products Using the Dynamic Bayesian Model Averaging Scheme over the Tibetan Plateau. J. Geophys. Res.-Atmos. 2018, 123, 814–834. [Google Scholar] [CrossRef] [Green Version]
- AghaKouchak, A.; Mehran, A.; Norouzi, H.; Behrangi, A. Systematic and random error components in satellite precipitation data sets. Geophys. Res. Lett. 2012, 39, L09406. [Google Scholar] [CrossRef] [Green Version]
- Maggioni, V.; Sapiano, M.R.; Adler, R.F. Estimating uncertainties in high-resolution satellite precipitation products: Systematic or random error? J. Hydrometeorol. 2016, 17, 1119–1129. [Google Scholar] [CrossRef]
- Derin, Y.; Anagnostou, E.; Anagnostou, M.N.; Kalogiros, J.; Casella, D.; Marra, A.C.; Panegrossi, G.; Sanò, P. Passive microwave rainfall error analysis using high-resolution X-band dual-polarization radar observations in complex terrain. IEEE Trans. Geosci. Remote Sens. 2018, 56, 2565–2586. [Google Scholar] [CrossRef]
- Gebregiorgis, A.S.; Kirstetter, P.E.; Hong, Y.E.; Gourley, J.J.; Huffman, G.J.; Petersen, W.A.; Xue, X.; Schwaller, M.R. To what extent is the day 1 GPM IMERG satellite precipitation estimate improved as compared to TRMM TMPA-RT? J. Geophys. Res. Atmos. 2018, 123, 1694–1707. [Google Scholar] [CrossRef]
- Guilloteau, C.; Foufoula-Georgiou, E.; Kummerow, C.D. Global multiscale evaluation of satellite passive microwave retrieval of precipitation during the TRMM and GPM eras: Effective resolution and regional diagnostics for future algorithm development. J. Hydrometeorol. 2017, 18, 3051–3070. [Google Scholar] [CrossRef]
- Tan, J.; Petersen, W.A.; Tokay, A. A novel approach to identify sources of errors in IMERG for GPM ground validation. J. Hydrometeorol. 2016, 17, 2477–2491. [Google Scholar] [CrossRef]
- Zhu, Y.; Wang, H.; Zhou, W.; Ma, J. Recent changes in the summer precipitation pattern in East China and the background circulation. Clim. Dyn. 2011, 36, 1463–1473. [Google Scholar] [CrossRef]
- Chao, L.J.; Zhang, K.; Li, Z.J.; Wang, J.F.; Yao, C.; Li, Q.L. Applicability assessment of the CASCade Two Dimensional SEDiment (CASC2D-SED) distributed hydrological model for flood forecasting across four typical medium and small watersheds in China. J. Flood Risk Manag. 2019, 12, e12518. [Google Scholar] [CrossRef] [Green Version]
- Yao, C.; Li, Z.; Yu, Z.; Zhang, K. A priori parameter estimates for a distributed, grid-based Xinanjiang model using geographically based information. J. Hydrol. 2012, 468–469, 47–62. [Google Scholar] [CrossRef]
- Zang, S.; Li, Z.; Zhang, K.; Yao, C.; Liu, Z.; Wang, J.; Huang, Y.; Wang, S. Improving the flood prediction capability of the Xin’anjiang model by formulating a new physics-based routing framework and a key routing parameter estimation method. J. Hydrol. 2021, 603, 126867. [Google Scholar] [CrossRef]
- Wu, C.; Huang, G.; Yu, H.; Chen, Z.; Ma, J. Impact of Climate Change on Reservoir Flood Control in the Upstream Area of the Beijiang River Basin, South China. J. Hydrometeorol. 2014, 15, 2203–2218. [Google Scholar] [CrossRef]
- Xu, Y.; Huang, X.; Zhang, Y.; Lin, W.; Lin, E. Statistical Analyses of Climate Change Scenarios over China in the 21st Century. Adv. Clim. Chang. Res. 2006, 2, 50–53. [Google Scholar]
- Fu, G.; Yu, J.; Yu, X.; Ouyang, R.; Min, L. Temporal variation of extreme rainfall events in China, 1961–2009. J. Hydrol. 2013, 487, 48–59. [Google Scholar] [CrossRef]
- Zhang, K.; Li, Y.; Yu, Z.; Yang, T.; Xu, J.; Chao, L.; Ni, J.; Wang, L.; Gao, Y.; Hu, Y.; et al. Xin’anjiang Nested Experimental Watershed (XAJ-NEW) for Understanding Multiscale Water Cycle: Scientific Objectives and Experimental Design. Engineering 2022, 18, 207–217. [Google Scholar] [CrossRef]
- Li, Z.; Liu, M.; Zhao, Y.; Liang, T.; Sha, J.; Wang, Y. Application of Regional Nutrient Management Model in Tunxi Catchment: In Support of the Trans-boundary Eco-compensation in Eastern China. Clean-Soil Air Water 2014, 42, 1729–1739. [Google Scholar] [CrossRef]
- Qi, Z.; Kang, G.; Chu, C.; Qiu, Y.; Xu, Z.; Wang, Y. Comparison of SWAT and GWLF Model Simulation Performance in Humid South and Semi-Arid North of China. Water 2017, 9, 567. [Google Scholar] [CrossRef] [Green Version]
- Zhao, J.; Xu, J.; Cheng, L.; Jin, J.; Li, X.; Chen, N.; Han, D.; Zhong, Y. The evolvement mechanism of hydro-meteorological elements under climate change and the interaction impacts in Xin’anjiang Basin, China. Stoch. Environ. Res. Risk Assess. 2019, 33, 1159–1173. [Google Scholar] [CrossRef]
- Yan, L.; Chen, C.; Hang, T.; Hu, Y. A stream prediction model based on attention-LSTM. Earth Sci. Inform. 2021, 14, 723–733. [Google Scholar] [CrossRef]
- Qi, Z.; Kang, G.; Shen, M.; Wang, Y.; Chu, C. The Improvement in GWLF Model Simulation Performance in Watershed Hydrology by Changing the Transport Framework. Water Resour. Manag. 2019, 33, 923–937. [Google Scholar] [CrossRef]
- Huffman, G.J.; Bolvin, D.T.; Braithwaite, D.; Hsu, K.; Joyce, R.; Xie, P.; Yoo, S.-H. NASA global precipitation measurement (GPM) integrated multi-satellite retrievals for GPM (IMERG). Algorithm Theor. Basis Doc. (ATBD) Version 2015, 4, 26. [Google Scholar]
- Huffman, G.J. The Transition in Multi-Satellite Products from TRMM to GPM (TMPA to IMERG). Algorithm Information Document. 2019. Available online: https://docserver.gesdisc.eosdis.nasa.gov/public/project/GPM/TMPA-to-IMERG_transition.pdf (accessed on 2 November 2021).
- Moazami, S.; Najafi, M.R. A comprehensive evaluation of GPM-IMERG V06 and MRMS with hourly ground-based precipitation observations across Canada. J. Hydrol. 2021, 594, 125929. [Google Scholar] [CrossRef]
- Wang, S.; Liu, J.; Wang, J.; Qiao, X.; Zhang, J. Evaluation of GPM IMERG V05B and TRMM 3B42V7 Precipitation products over high mountainous tributaries in Lhasa with dense rain gauges. Remote Sens. 2019, 11, 2080. [Google Scholar] [CrossRef] [Green Version]
- Tang, S.; Li, R.; He, J.; Fan, X.; Wang, H.; Yao, S. Seasonal error component analysis of the GPM IMERG version 05 precipitation estimations over Sichuan basin of China. Earth Space Sci. 2021, 8, e2020EA001259. [Google Scholar] [CrossRef]
- Murphy, A.H. A New Vector Partition of the Probability Score. J. Appl. Meteorol. Climatol. 1973, 12, 595–600. [Google Scholar] [CrossRef]
- Chen, H.; Yong, B.; Kirstetter, P.-E.; Wang, L.; Hong, Y. Global component analysis of errors in three satellite-only global precipitation estimates. Hydrol. Earth Syst. Sci. 2021, 25, 3087–3104. [Google Scholar] [CrossRef]
- Yuan, F.; Wang, B.; Shi, C.; Cui, W.; Zhao, C.; Liu, Y.; Ren, L.; Zhang, L.; Zhu, Y.; Chen, T. Evaluation of hydrological utility of IMERG Final run V05 and TMPA 3B42V7 satellite precipitation products in the Yellow River source region, China. J. Hydrol. 2018, 567, 696–711. [Google Scholar] [CrossRef]
- Hong, Y.; Hsu, K.-L.; Sorooshian, S.; Gao, X. Precipitation Estimation from Remotely Sensed Imagery Using an Artificial Neural Network Cloud Classification System. J. Appl. Meteorol. 2004, 43, 1834–1853. [Google Scholar] [CrossRef] [Green Version]
- Chen, H.; Yong, B.; Gourley, J.J.; Liu, J.; Ren, L.; Wang, W.; Hong, Y.; Zhang, J. Impact of the crucial geographic and climatic factors on the input source errors of GPM-based global satellite precipitation estimates. J. Hydrol. 2019, 575, 1–16. [Google Scholar] [CrossRef]
- Ahmed, K.; Sachindra, D.; Shahid, S.; Iqbal, Z.; Nawaz, N.; Khan, N. Multi-model ensemble predictions of precipitation and temperature using machine learning algorithms. Atmos. Res. 2020, 236, 104806. [Google Scholar] [CrossRef]
- Ali, M.M.; Paul, B.K.; Ahmed, K.; Bui, F.M.; Quinn, J.M.; Moni, M.A. Heart disease prediction using supervised machine learning algorithms: Performance analysis and comparison. Comput. Biol. Med. 2021, 136, 104672. [Google Scholar] [CrossRef]
- Pandian, A.P. Performance evaluation and comparison using deep learning techniques in sentiment analysis. J. Soft Comput. Paradig. (JSCP) 2021, 3, 123–134. [Google Scholar]
- Saranya, T.; Sridevi, S.; Deisy, C.; Chung, T.D.; Khan, M.A. Performance analysis of machine learning algorithms in intrusion detection system: A review. Procedia Comput. Sci. 2020, 171, 1251–1260. [Google Scholar] [CrossRef]
- Schlef, K.E.; Moradkhani, H.; Lall, U. Atmospheric circulation patterns associated with extreme United States floods identified via machine learning. Sci. Rep. 2019, 9, 7171. [Google Scholar] [CrossRef] [Green Version]
- Tsakanikas, P.; Karnavas, A.; Panagou, E.Z.; Nychas, G.-J. A machine learning workflow for raw food spectroscopic classification in a future industry. Sci. Rep. 2020, 10, 11212. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Type | Sensor | Satellite | Date Span | Data Period |
|---|---|---|---|---|
| Imager | GMI | GPM | April 2014–February 2024 | January 2018–December 2020 |
| AMSR2 | GCOMW1 | July 2012–May 2022 | January 2018–December 2020 | |
| SSMIS | DMSP-F16 | November 2005–February 2019 | January 2018–February 2019 | |
| DMSP-F17 | March 2008–December 2020 | January 2018–December 2020 | ||
| DMSP-F18 | March 2010–March 2020 | January 2018–March 2020 | ||
| Sounder | MHS | NOAA-18 | May 2005–October 2018 | January 2018–October 2020 |
| NOAA-19 | February 2009–April 2020 | January 2018–April 2020 | ||
| MetOp-A | December 2006–August 2022 | January 2018–December 2020 | ||
| MetOp-B | April 2013–August 2023 | January 2018–December 2020 | ||
| ATMS | NOAA-20 | November 2017–August 2024 | January 2018–December 2020 | |
| SNPP | December 2011–December 2019 | January 2018–December 2019 |
| Statistical Index | Formula | Perfect Value |
|---|---|---|
| Hit ratio (HR) | HR = H/T | - |
| False ratio (FR) | FR = F/T | 0 |
| Miss ratio (MR) | MR = M/T | 0 |
| Nonevent ratio (NR) | NR = N/T | - |
| Probability of detection (POD) | POD = H/(H + M) | 1 |
| False alarm ratio (FAR) | FAR = F/(F + N) | 0 |
| Critical success index (CSI) | CSI = F/(F + N + M) | 1 |
| Brier score (BS) | BS = E[(PS − PG)2] | 0 |
| Statistical Index | Formula | Perfect Value |
|---|---|---|
| Total bias (TB) | 0 | |
| Hit bias (HB) | 0 | |
| False bias (FB) | 0 | |
| Miss bias (MB) | 0 | |
| Hit overestimate bias (HOB) | 0 | |
| Hit underestimate bias (HUB) | 0 | |
| Overestimate bias (OB) | 0 | |
| Underestimate bias (UB) | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Zhang, K.; Bardossy, A.; Shen, X.; Cheng, Y. Evaluation and Error Decomposition of IMERG Product Based on Multiple Satellite Sensors. Remote Sens. 2023, 15, 1710. https://doi.org/10.3390/rs15061710
Li Y, Zhang K, Bardossy A, Shen X, Cheng Y. Evaluation and Error Decomposition of IMERG Product Based on Multiple Satellite Sensors. Remote Sensing. 2023; 15(6):1710. https://doi.org/10.3390/rs15061710
Chicago/Turabian StyleLi, Yunping, Ke Zhang, Andras Bardossy, Xiaoji Shen, and Yujia Cheng. 2023. "Evaluation and Error Decomposition of IMERG Product Based on Multiple Satellite Sensors" Remote Sensing 15, no. 6: 1710. https://doi.org/10.3390/rs15061710