

Integration of Distributed Dense Polish GNSS Data for Monitoring the Low Deformation Rates of Earth’s Crust

Abstract
:1. Introduction
2. Polish GNSS Data Research Infrastructure Center
2.1. GNSS Data Analysis
2.2. GNSS Velocity Estimation
3. Strain Rates
3.1. Distance-Based Data Filtration (DBF)
3.2. Strain Pattern-Based Data Filtration (SBF)
4. Discussion
5. Conclusions
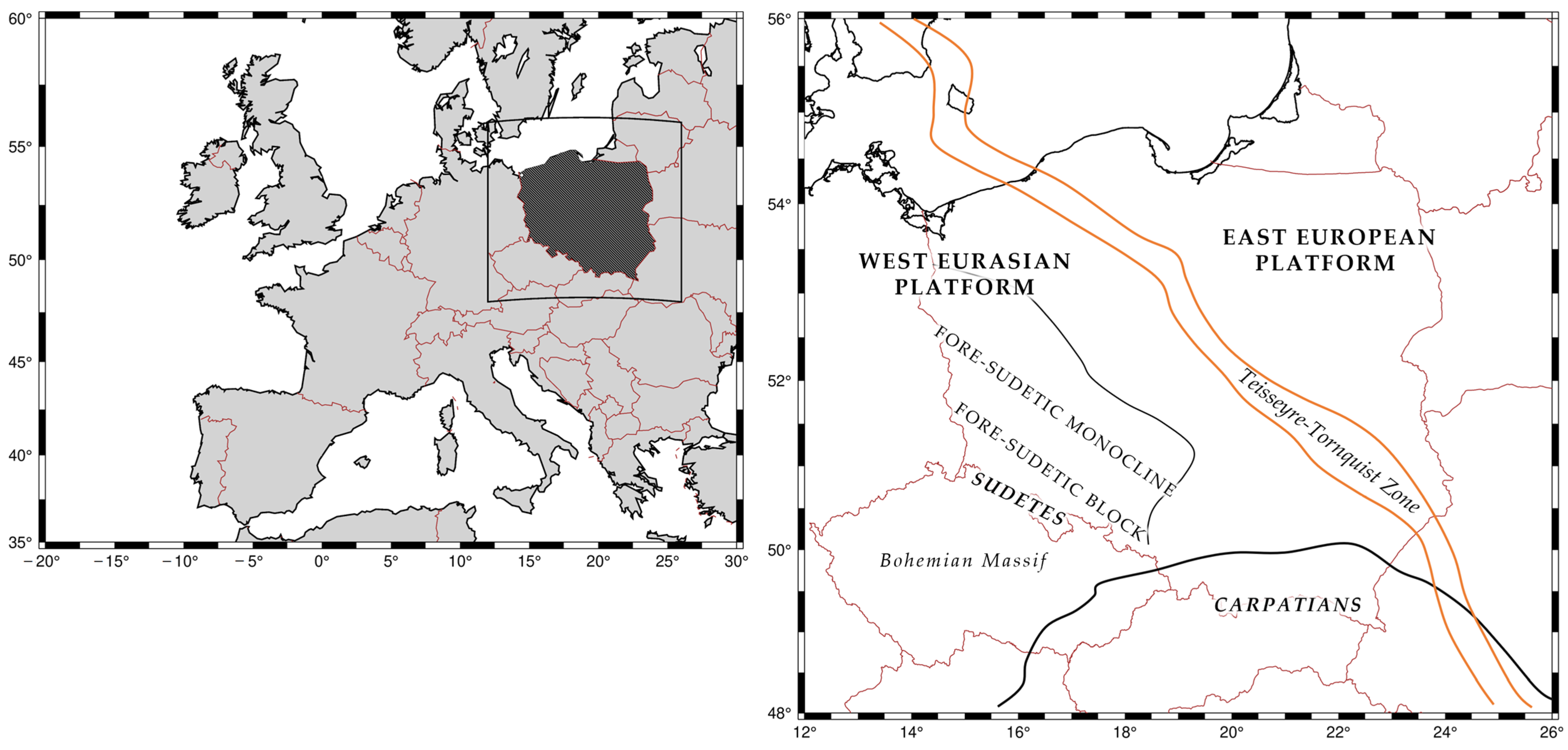
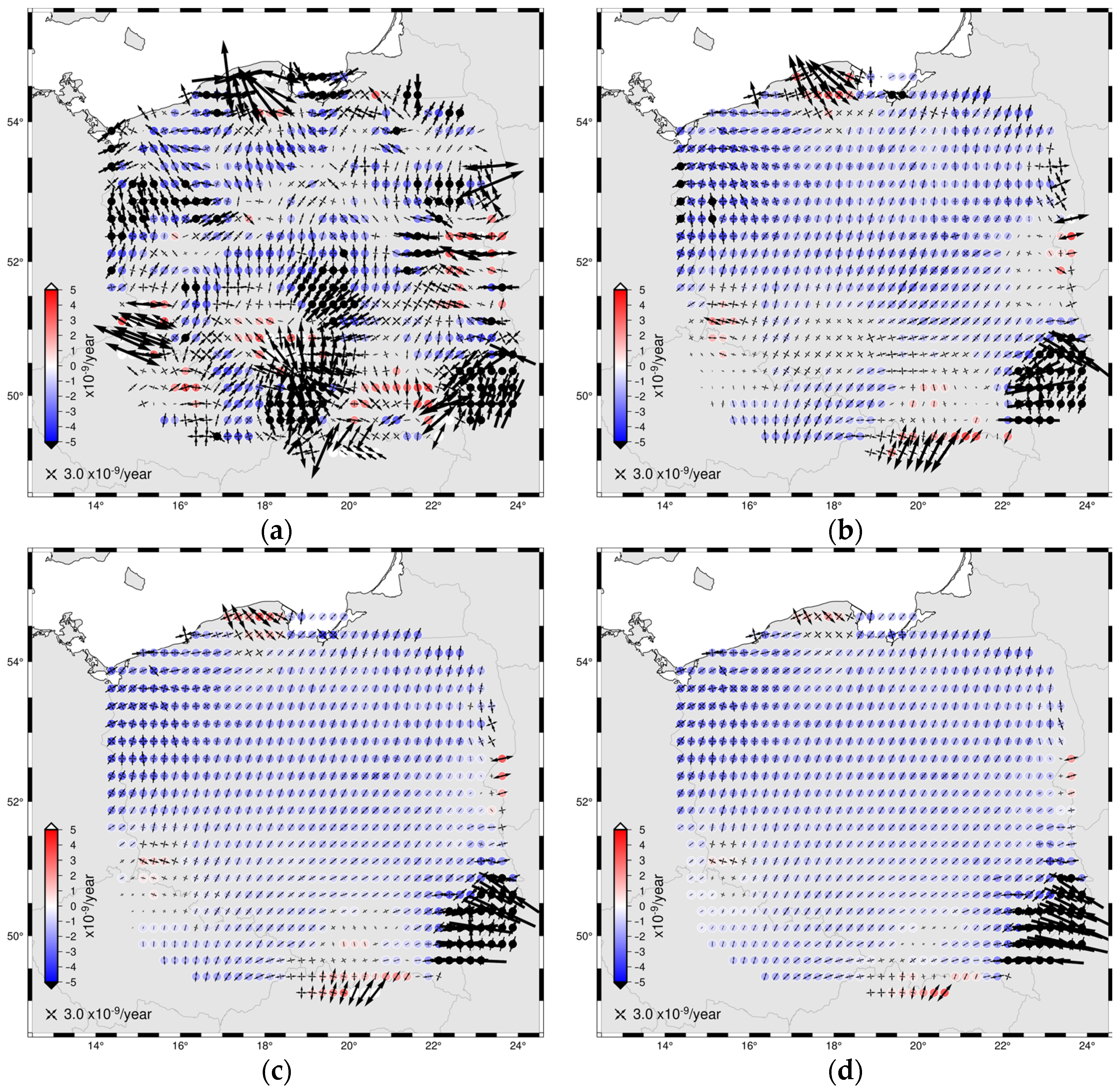
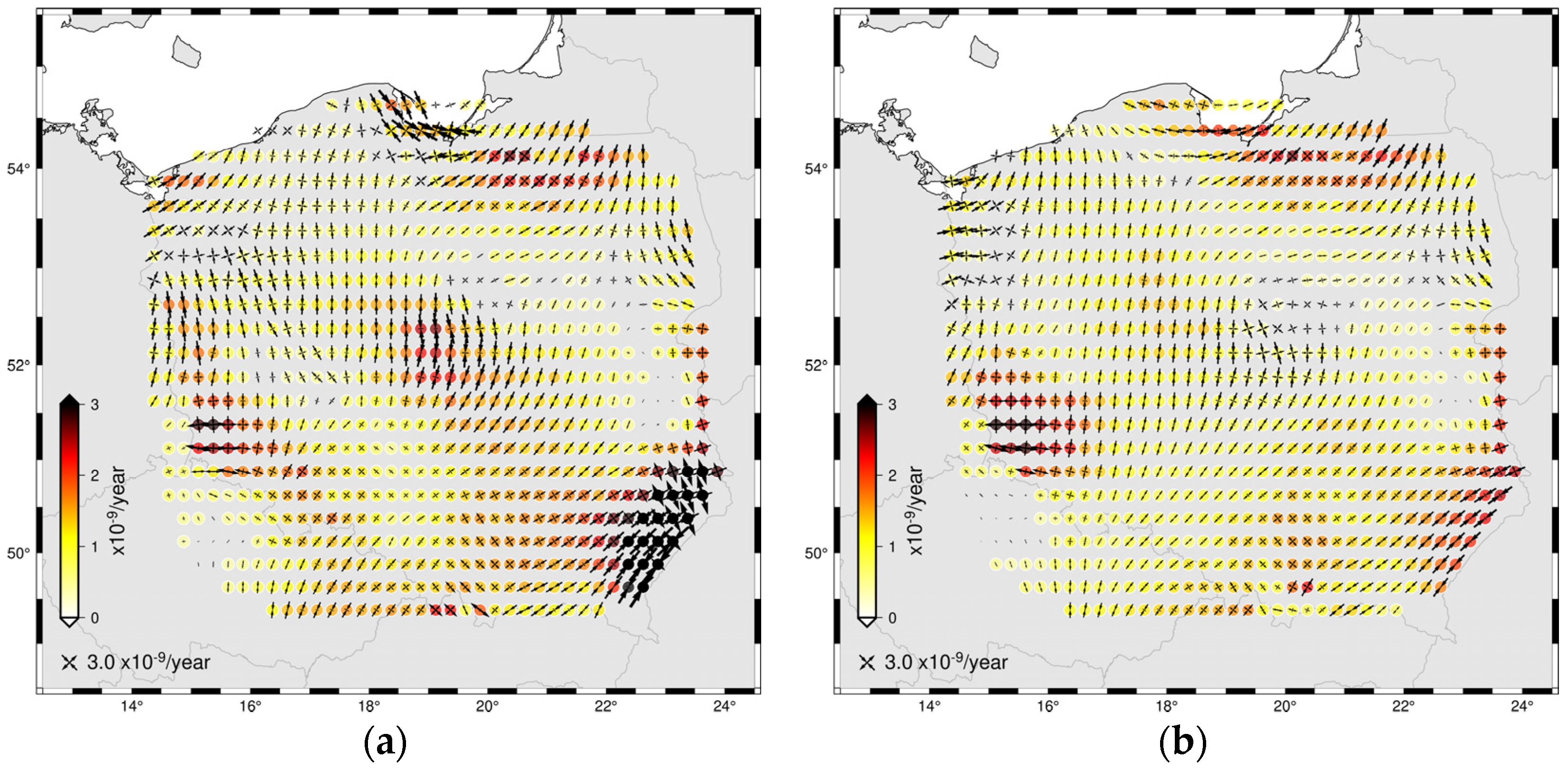
- The small degree of shortening (−1.7 × 10−9/year) in the NNE-SSE direction dominates in most of the Polish territory and in the NNE-SSW direction (azimuth of 205.4°), which is consistent with the direction of maximum stress in Poland from local measurements and the World Stress Map.
- A slightly slower rate of deformation occurs on the East European Platform (−1.4 × 10−9/year) than on the West European Platform (−1.9 × 10−9/year). There are differences in both dilatation and shear deformation.
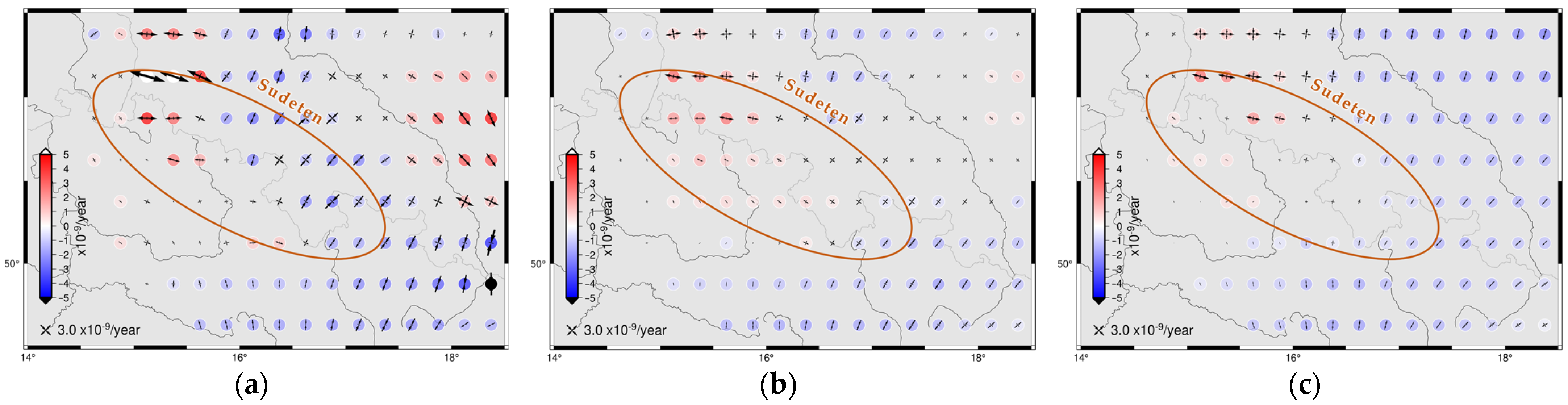
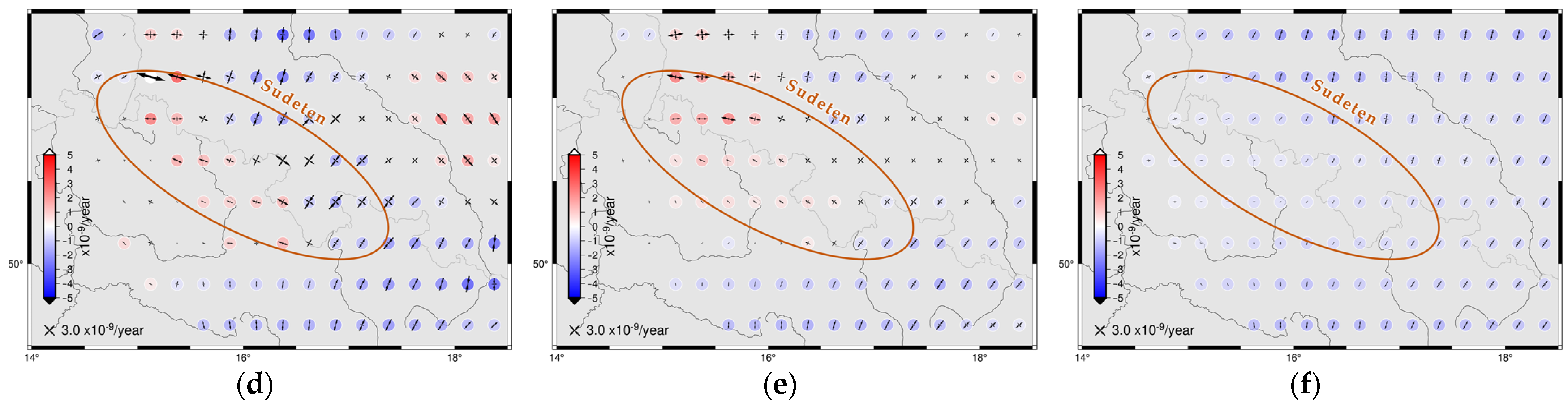
- Surprisingly little deformation was obtained for the Sudetes region, where deformations are practically absent. This is most likely due to inadequate station placement and the methodology adopted.
- The results of this work confirm the hypotheses of the paper [16], and it was also shown that dense data and appropriate filtering are necessary for detecting small deformations.
- Due to the small number of stations stabilized directly in the ground, it is necessary to try to acquire more points with similar characteristics outside Poland in order to increase the reliability of the obtained results. It is advisable that future studies use as many stations as possible in a zone of up to 100 km from the Polish borders, with a sufficiently long observation period.
- Deformation analysis should be carried out on the basis of the new velocities determined after the reprocessing campaign using the new IGS20 frame and models [76]. At this point, detailed analysis and the selection of stations whose movement is least questionable should be carried out.
- Regions for which results diverged depending on the adopted filtering method should be analyzed in detail. These are mainly border regions for which adequate surface filtration was not possible.
- Due to the complex geological structure of the Sudetes, it would make sense to install a few permanent geodynamic stations in the region.
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

| Station | Longitude | Latitude | vE | vN | sVE | sVN |
|---|---|---|---|---|---|---|
| [Degree] | [mm/Year] | |||||
| 0014 | 14.33130 | 51.73680 | −0.22 | +0.29 | 0.04 | 0.02 |
| BOGO | 21.03530 | 52.47590 | −0.65 | +0.03 | 0.06 | 0.03 |
| BPDL | 23.12740 | 52.03530 | −0.36 | +0.06 | 0.05 | 0.06 |
| BYTO | 17.48810 | 54.15720 | −0.59 | −0.44 | 0.11 | 0.16 |
| CFRM | 18.35320 | 49.68480 | −0.01 | +0.37 | 0.03 | 0.04 |
| CHOJ | 17.55240 | 53.69520 | −0.61 | −0.33 | 0.04 | 0.04 |
| DABI | 23.34530 | 53.65660 | −0.84 | −0.11 | 0.07 | 0.08 |
| DZIA | 20.16740 | 53.23030 | −0.65 | +0.07 | 0.08 | 0.05 |
| GARW | 21.61200 | 51.89810 | −0.49 | −0.10 | 0.06 | 0.04 |
| GDPG | 18.61630 | 54.37150 | −0.71 | −0.32 | 0.08 | 0.05 |
| GOL2 | 14.98200 | 53.82610 | −0.35 | −0.26 | 0.12 | 0.06 |
| GOPE | 14.78560 | 49.91370 | +0.02 | +0.05 | 0.05 | 0.05 |
| GRAJ | 22.45230 | 53.65100 | −0.76 | −0.09 | 0.04 | 0.06 |
| GRAN | 16.53140 | 52.21600 | −0.55 | +0.12 | 0.05 | 0.12 |
| GUBI | 14.73860 | 51.94600 | −0.45 | +0.20 | 0.04 | 0.12 |
| JAKU | 15.43330 | 50.81710 | −0.18 | +0.45 | 0.04 | 0.08 |
| KALI | 18.09520 | 51.75390 | −0.25 | +0.21 | 0.03 | 0.02 |
| KAM1 | 14.77740 | 53.96310 | −0.50 | −0.27 | 0.03 | 0.04 |
| KEDZ | 18.33080 | 50.37450 | −0.12 | +0.30 | 0.07 | 0.06 |
| KEPN | 17.98360 | 51.28020 | −0.32 | +0.40 | 0.05 | 0.05 |
| KLCE | 20.62970 | 50.87580 | −0.39 | +0.27 | 0.03 | 0.03 |
| KLOB | 18.93690 | 50.90550 | −0.14 | +0.31 | 0.04 | 0.11 |
| KONI | 18.25400 | 52.22810 | −0.27 | +0.03 | 0.07 | 0.04 |
| KRSN | 22.17570 | 50.95990 | −0.43 | +0.17 | 0.04 | 0.04 |
| KUTN | 19.37500 | 52.22600 | −0.35 | −0.02 | 0.06 | 0.12 |
| LACK | 19.60970 | 52.46600 | −0.46 | −0.07 | 0.05 | 0.05 |
| LAZY | 18.89260 | 49.82300 | −0.09 | +0.50 | 0.04 | 0.03 |
| LBNC | 18.75280 | 50.71390 | −0.21 | +0.33 | 0.05 | 0.08 |
| LESZ | 16.57850 | 51.84040 | −0.35 | −0.08 | 0.06 | 0.06 |
| LOMA | 22.06230 | 53.17980 | −0.62 | −0.12 | 0.06 | 0.06 |
| LUBL | 22.55470 | 51.25090 | −0.56 | +0.17 | 0.04 | 0.04 |
| NAMY | 17.74250 | 51.07480 | −0.11 | +0.28 | 0.04 | 0.04 |
| NIDZ | 20.41760 | 53.36380 | −0.59 | −0.08 | 0.06 | 0.05 |
| NTML | 16.11800 | 52.32080 | −0.29 | +0.11 | 0.07 | 0.05 |
| OPLU | 21.97590 | 51.14930 | −0.47 | +0.20 | 0.03 | 0.04 |
| PISC | 23.36700 | 51.97630 | −0.57 | +0.11 | 0.06 | 0.04 |
| POLA | 16.68400 | 54.12080 | −0.48 | −0.50 | 0.12 | 0.04 |
| PPIL | 16.73830 | 53.15700 | −0.54 | −0.26 | 0.04 | 0.07 |
| RADM | 21.16380 | 51.39140 | −0.46 | +0.25 | 0.08 | 0.08 |
| RYKI | 21.92720 | 51.62450 | −0.58 | +0.11 | 0.11 | 0.04 |
| RZEC | 17.11240 | 53.75640 | −0.58 | −0.27 | 0.08 | 0.07 |
| SANO | 22.20080 | 49.55980 | −0.25 | +0.20 | 0.09 | 0.05 |
| SIDZ | 18.71760 | 51.57300 | −0.22 | +0.07 | 0.08 | 0.06 |
| SIED | 22.29420 | 52.15740 | −0.48 | +0.00 | 0.07 | 0.03 |
| SIEM | 22.86270 | 52.42400 | −0.40 | +0.07 | 0.16 | 0.08 |
| SKCE | 20.14130 | 51.95500 | −0.54 | −0.07 | 0.04 | 0.04 |
| SKSK | 21.57090 | 49.30820 | −0.05 | +0.29 | 0.08 | 0.06 |
| STRO | 20.50530 | 52.51860 | −0.65 | −0.19 | 0.06 | 0.06 |
| SWKI | 22.92820 | 54.09860 | −0.96 | −0.13 | 0.07 | 0.13 |
| SYOW | 17.74790 | 51.30480 | −0.36 | +0.26 | 0.05 | 0.07 |
| SZAM | 16.57210 | 52.61980 | −0.61 | −0.02 | 0.07 | 0.14 |
| TKRN | 17.68370 | 50.09170 | −0.12 | +0.52 | 0.08 | 0.04 |
| TORZ | 15.07410 | 52.31320 | −0.33 | +0.11 | 0.05 | 0.11 |
| TUBO | 16.59280 | 49.20590 | +0.16 | +0.59 | 0.08 | 0.07 |
| TUCH | 17.86030 | 53.58520 | −0.58 | −0.44 | 0.09 | 0.13 |
| TUCZ | 16.15760 | 53.23390 | −0.39 | −0.21 | 0.07 | 0.04 |
| TUPI | 16.01090 | 50.50710 | −0.19 | +0.33 | 0.05 | 0.05 |
| TVID | 17.18540 | 50.37290 | −0.26 | +0.50 | 0.06 | 0.10 |
| USDL | 22.58580 | 49.43290 | −0.05 | +0.31 | 0.09 | 0.09 |
| USTA | 16.87380 | 54.57750 | −0.46 | −0.47 | 0.16 | 0.06 |
| WART | 18.62490 | 51.70760 | −0.39 | +0.33 | 0.03 | 0.06 |
| WAT1 | 20.90380 | 52.25380 | −0.49 | +0.00 | 0.11 | 0.05 |
| WLOD | 23.55760 | 51.54480 | −0.34 | +0.18 | 0.04 | 0.04 |
| WRKI | 16.37110 | 52.70560 | −0.29 | −0.12 | 0.07 | 0.08 |
| ZLOT | 17.04090 | 53.36760 | −0.44 | −0.31 | 0.04 | 0.09 |
| ZWIE | 22.96250 | 50.61550 | −0.45 | +0.01 | 0.10 | 0.06 |
References
- Global Geodetic Observing System: Meeting the Requirements of a Global Society on a Changing Planet in 2020; Plag, H.-G.; Pearlman, M. (Eds.) Springer: Berlin/Heidelberg, Germany, 2009; pp. 209–224. [Google Scholar] [CrossRef]
- Savchyn, I.; Brusak, I.; Tretyakm, K. Analysis of recent Antarctic plate kinematics based on GNSS data. Geod. Geodyn. 2022, in press. [Google Scholar] [CrossRef]
- Zanutta, A.; Negusini, M.; Vittuari, L.; Martelli, L.; Cianfarra, P.; Salvini, F.; Mancini, F.; Sterzai, P.; Creati, N.; Dubbini, M.; et al. Victoria Land, Antarctica: An Improved Geodynamic Interpretation Based on the Strain Rate Field of the Current Crustal Motion and Moho Depth Model. Remote Sens. 2021, 13, 87. [Google Scholar] [CrossRef]
- Li, W.; Shum, C.K.; Li, F.; Zhang, S.; Ming, F.; Chen, W.; Zhang, B.; Lei, J.; Zhang, Q. Contributions of Greenland GPS observed deformation from multisource mass loading induced seasonal and transient signals. Geophys. Res. L. 2020, 47, e2020GL088627. [Google Scholar] [CrossRef]
- Kreemer, C.; Haines, J.; Holt, W.; Blewitt, G.; Lavallée, D. On the determination of a global strain rate model. Geophys. J. Int. 2000, 52, 765–770. [Google Scholar] [CrossRef] [Green Version]
- Kreemer, C.; Holt, W.E.; Haines, A.J. An integrated global model of present-day plate motions and plate boundary deformation. Geophys. J. Int. 2003, 154, 8–34. [Google Scholar] [CrossRef] [Green Version]
- Bennett, R.; Rodi, W.; Reilinger, R. Global Positioning System constraints on fault slip rates in southern California and northern Baja, Mexico. J. Geophys. Res. 1996, 101, 21943–21960. [Google Scholar] [CrossRef]
- Shen-Tu, B.; Holt, W.; Haines, A.J. Deformation kinematics in the western United States determined from Quaternary fault slip rates and recent geodetic data. J. Geophys. Res. 1999, 104, 28927–28955. [Google Scholar] [CrossRef]
- Allmendinger, R.; Reilinger, R.; Loveless, R. Strain and rotation rate from GPS in Tibet, Anatolia, and the Altiplano. Tectonics 2007, 26, TC3013. [Google Scholar] [CrossRef] [Green Version]
- Kreemer, C.; Young, Z. Crustal Strain Rates in the Western United States and Their Relationship with Earthquake Rates. Seismol. Res. Lett. 2022, 93, 2990–3008. [Google Scholar] [CrossRef]
- Mohamed, A.-M.S.; AbuBakr, M.M.; Awad, M.H.; Sakr, K.O.; Etman, M.S. Utilisation of GNSS and seismicity for monitoring crustal deformation of the Northern part of the Nile Delta, Egypt. NRIAG J. Astron. Geophys. 2021, 10, 1–9. [Google Scholar] [CrossRef]
- Sboras, S.; Lazos, I.; Bitharis, S.; Pikridas, C.; Galanakis, D.; Fotiou, A.; Chatzipetros, A.; Pavlides, S. Source modelling and stress transfer scenarios of the October 30, 2020 Samos earthquake: Seismotectonic implications. Turk. J. Earth Sci. 2021, 30, 699–717. [Google Scholar] [CrossRef]
- Paziewski, J.; Kurpinski, G.; Wielgosz, P.; Stolecki, L.; Sieradzki, R.; Seta, M.; Oszczak, S.; Castillo, M.; Martin-Porqueras, F. Towards Galileo + GPS seismology: Validation of high-rate GNSS-based system for seismic events characterisation. Measurement 2020, 166, 108236. [Google Scholar] [CrossRef]
- Blewitt, G.; Hammond, W.; Kreemer, C.; Plag, H.-P.; Stein, S.; Okal, E. GPS for real-time earthquake source determination and tsunami warning systems. J. Geod. 2009, 83, 335–343. [Google Scholar] [CrossRef]
- Meschis, M.; Teza, G.; Serpelloni, E.; Elia, L.; Lattanzi, G.; Di Donato, M.; Castellaro, S. Refining Rates of Active Crustal Deformation in the Upper Plate of Subduction Zones, Implied by Geological and Geodetic Data: The E-Dipping West Crati Fault, Southern Italy. Remote Sens. 2022, 14, 5303. [Google Scholar] [CrossRef]
- Masson, C.; Mazzotti, S.; Vernant, P.; Doerflinger, E. Extracting small deformation beyond individual station precision from dense Global Navigation Satellite System (GNSS) networks in France and western Europe. Solid Earth 2019, 10, 1905–1920. [Google Scholar] [CrossRef] [Green Version]
- Mazur, S.; Porębski, S.J.; Kędzior, A.; Paszkowski, M.; Podhalańska, T.; Poprawa, P. Refined timing and kinematics for Baltica–Avalonia convergence based on the sedimentary record of a foreland basin. Terra Nova 2018, 30, 8–16. [Google Scholar] [CrossRef]
- Pharaoh, T.C. Palaeozoic terranes and their lithospheric boundaries within the Trans-European Suture Zone (TESZ): A review. Tectonophysics 1999, 314, 17–41. [Google Scholar] [CrossRef]
- Bogusz, J.; Kujawa, L.; Liwosz, T.; Rogowski, J.B.; Jarosiński, M.; Kłęk, M. Determination of the deformation of the Earth’s crust in Poland. Rep. Geod. 2008, 2/85, 19–29. [Google Scholar]
- Schenk, V.; Cacon, S.; Bosy, J.; Kontny, B.; Kottnauer, P.; Schenkova, Z. The GPS Geodynamic Network East Sutleten-Five annual campaigns (1997–2000). Data processing and results. Acta Mont. 2020, 20, 13–23. [Google Scholar]
- Schenk, V.; Schenkova, Z.; Cacon, S.; Kontny, B.; Bosy, J.; Kottnauer, P. To Geodynamic interpretations of GPS data monitored on the East Sudeten Network. Acta Mont. 2003, 24, 87–97. [Google Scholar]
- Schenk, V.; Schenkova, Z.; Bosy, J.; Kontny, B. Reliability of GPS data for geodynamic studies case study: Sudeten area, The Bohemian Massif. Acta Geod. Geomater. 2010, 7, 113–128. [Google Scholar]
- Kapłon, J.; Kontny, B.; Grzempowski, P.; Schenk, V.; Schenkowa, Z.; Balek, J.; Holesovsky, J. GEOSUD/SUDETEN network GPS data reprocessing and horizontal site velocity estimation. Acta Geod. Geomater. 2014, 1, 65–75. [Google Scholar] [CrossRef] [Green Version]
- Bogusz, J.; Figurski, M.; Kontny, B.; Grzempowski, P. Unmodelled effects in the horizontal velocity fields: ASG-EUPOS case study. Artif. Satell. 2012, 47, 67–79. [Google Scholar] [CrossRef] [Green Version]
- Bogusz, J.; Kłos, A.; Grzempowski, P.; Kontny, B. Modelling the velocity field in a regular grid in the area of Poland on the basis of the velocities of European permanent stations. Pure and Appl. Geophys. 2014, 171, 809–833. [Google Scholar] [CrossRef] [Green Version]
- Bosy, J.; Graszka, W.; Leończyk, M. ASG-EUPOS. A Multifunctional Precise Satellite Positioning System in Poland. Eur. J. Navig. 2007, 5, 2–6. [Google Scholar]
- Liwosz, T.; Ryczywolski, M. Verification of the Polish geodetic reference frame by means of a new solution based on permanent GNSS data from the years 2011–2014. Rep. Geod. Geoinform. 2016, 102, 52–66. [Google Scholar] [CrossRef] [Green Version]
- Bogusz, J.; Kłos, A.; Figurski, M.; Jarosiński, M. Investigation of the reliability of local strain analysis by the triangle modelling. Acta Geod. Geomater. 2013, 10, 293–305. [Google Scholar] [CrossRef] [Green Version]
- Wu, Y.; Jiang, Z.; Yang, G.; Wei, W.; Liu, X. Comparison of GPS strain rate computing methods and their reliability. Geophys. J. Int. 2011, 185, 703–717. [Google Scholar] [CrossRef] [Green Version]
- Lazos, I.; Papanikolaou, I.; Sboras, S.; Foumelis, M.; Pikridas, C. Geodetic Upper Crust Deformation Based on Primary GNSS and INSAR Data in the Strymon Basin, Northern Greece—Correlation with Active Faults. Appl. Sci. 2022, 12, 9391. [Google Scholar] [CrossRef]
- Serpelloni, E.; Anzidei, M.; Baldi, P.; Casula, G.; Galvani, A. Crustal velocity and strain-rate fields in Italy and surrounding regions: New results from the analysis of permanent and non-permanent GPS networks. Geophys. J. Int. 2005, 161, 861–880. [Google Scholar] [CrossRef] [Green Version]
- Araszkiewicz, A.; Jarosiński, M.; Figurski, M. Erroneous GNSS strain rate patterns and their application to investigate the tectonic credibility of GNSS velocities. Acta Geophys. 2016, 64, 1412–1429. [Google Scholar] [CrossRef] [Green Version]
- Shen, Z.-K.; Jackson, D.D.; Ge, B.X. Crustal deformation across and beyond the Los Angeles basin from geodetic measurements. J. Geophys. Res. 1996, 101, 27957–27980. [Google Scholar] [CrossRef]
- Pereira, R.A.D.; De Freitas, S.R.C.; Ferreira, V.G.; Faggion, P.L.; dos Santos, D.P.; Luz, R.T.; Tiera Criollo, A.R.; Del Cogliano, D. Evaluation of a Few Interpolation Techniques of Gravity Values in the Border Region of Brazil and Argentina. In Geodesy for Planet Earth. International Association of Geodesy Symposia; Kenyon, S., Pacino, M., Marti, U., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; Volume 136, pp. 909–915. [Google Scholar] [CrossRef]
- Vu, D.T.; Bruinsma, S.; Bonvalot, S.; Remy, D.; Vergos, G.S. A Quasigeoid-Derived Transformation Model Accounting for Land Subsidence in the Mekong Delta towards Height System Unification in Vietnam. Remote Sens. 2020, 12, 817. [Google Scholar] [CrossRef] [Green Version]
- Vestøl, O. Determination of Postglacial Land Uplift in Fennoscandia from Leveling, Tide-gauges and Continuous GPS Stations using Least Squares Collocation. J. Geod. 2006, 80, 248–258. [Google Scholar] [CrossRef]
- Egli, R.; Geiger, A.; Wiget, A.; Kahle, H.-G. A modified least-squares collocation method for the determination of crustal deformation: First results in the Swiss Alps. Geophys. J. Int. 2007, 168, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Caporali, A.; Martin, S.; Massironi, M. Average strain rate in the Italian crust inferred from a permanent GPS network–II. Strain rate versus seismicity and structural geology. Geophys. J. Int. 2003, 155, 254–268. [Google Scholar] [CrossRef] [Green Version]
- Okazaki, T.; Fukahata, Y.; Nishimura, T. Consistent estimation of strain-rate fields from GNSS velocity data using basis function expansion with ABIC. Earth Planets Space 2021, 73, 153. [Google Scholar] [CrossRef]
- Kierulf, H.P.; Ouassou, M.; Simpson, M.J.R.; Vestøl, O. A continuous velocity field for Norway. J. Geod. 2013, 87, 337–349. [Google Scholar] [CrossRef] [Green Version]
- Haines, A.J.; Holt, W.E. A procedure for obtaining the complete horizontal motions within zones of distributed deformation from the inversion of strain rate data. J. Geophys. Res. 1993, 98, 12057–12082. [Google Scholar] [CrossRef]
- Rashidi, A.; Derakhshani, R. Strain and Moment Rates from GPS and Seismological Data in Northern Iran: Implications for an Evaluation of Stress Trajectories and Probabilistic Fault Rupture Hazard. Remote Sens. 2022, 14, 2219. [Google Scholar] [CrossRef]
- Jarosiński, M.; Araszkiewicz, A.; Bobek, K.; Gogołek, T. Contemporary state of stress in a stable plate interior (northern Poland): The integration of satellite geodesy, borehole and seismological data. Tectonophysics 2022, 831, 229336. [Google Scholar] [CrossRef]
- Araszkiewicz, A.; Calka, B.; Kiliszek, D.; Kuzma, M.; Mierzwiak, M.; Moscicka, A.; Nowak Da Costa, J.; Pokonieczny, K.; Szolucha, M.; Wabinski, J.; et al. Geoportal of the GNSS Data Research Infrastructure Center. Ann. Geomat. 2022, 20, 6–7. (In Polish) [Google Scholar]
- Jeffery, K.G.; Bailo, D. EPOS: Using Metadata in Geoscience. In Metadata and Semantics Research. MTSR 2014. Communications in Computer and Information Science; Closs, S., Studer, R., Garoufallou, E., Sicilia, M.A., Eds.; Springer: Cham, Switzerland, 2014; Volume 478, pp. 170–184. [Google Scholar] [CrossRef]
- Atakan, K.; Tellefsen, K. European Plate Observing System–Norway (EPOS-N): A National Consortium for the Norwegian Implementation of EPOS. In Proceedings of the 20th EGU General Assembly, EGU2018, Vienna, Austria, 8–13 April 2018; Geophysical Research Abstracts. Volume 20, p. EGU2018-8119. [Google Scholar]
- Mutke, G.; Kotyrba, A.; Lurka, A.; Olszewska, D.; Dykowski, P.; Borkowski, A.; Araszkiewicz, A.; Barański, A. Upper Silesian Geophysical Observation System A unit of the EPOS project. J. Sustain. Min. 2019, 4, 198–207. [Google Scholar] [CrossRef]
- Atakan, K.; Cocco, M.; Orlecka-Sikora, B.; Pijnenburg, R.; Michalek, J.; Rønnevik, C.; Drury, M.; Olszewska, D.; Górka-Kostrubiec, B. National EPOS initiatives and participation to the EPOS integration plan. Ann. Geophys. 2022, 2, DM211. [Google Scholar] [CrossRef]
- Fernandes, R.; Bruyninx, C.; Crocker, P.; Menut, J.-L.; Socquet, A.; Vergnolle, M.; Avallone, A.; Bos, M.; Bruni, S.; Cardoso, R.; et al. A new European service to share GNSS Data and Products. Ann. Geophys. 2022, 65, 3, DM317. [Google Scholar] [CrossRef]
- Polish GNSS Data Research Infrastructure Center. Available online: http://gnss.wat.edu.pl/cibdg-en/ (accessed on 26 January 2023).
- Rebischung, P.; Griffiths, J.; Ray, J.; Schmid, R.; Collilieux, X.; Garayt, B. IGS08: The IGS realization of ITRF2008. GPS Solut. 2012, 16, 483–494. [Google Scholar] [CrossRef]
- Rebischung, P.; Schmid, R. IGS14/igs14.atx: A New Framework for the IGS Products. Fall Meeting of the American Geophysical Union, San Francisco, USA. December 2016. Available online: https://mediatum.ub.tum.de/doc/1341338/file.pdf (accessed on 1 January 2022).
- Araszkiewicz, A.; Völksen, C. The impact of the antenna phase center models on the coordinates in the EUREF Permanent Network. GPS Solut. 2017, 21, 747–757. [Google Scholar] [CrossRef]
- Bruyninx, C.; Legrand, J.; Fabian, A.; Pottiaux, E. GNSS metadata and data validation in the EUREF Permanent Network. GPS Solut. 2019, 23, 106. [Google Scholar] [CrossRef]
- Araszkiewicz, A.; Szafranek, K.; Figurski, M. Reference frame realization impact on network deformation–geodynamic research in tectonic stable areas. In Proceedings of the 14th SGEM GeoConference on Informatics, Geoinformatics and Remote Sensing, Albena, Bulgaria, 19–25 June 2014; Book 2. Volume 2, pp. 427–434. [Google Scholar] [CrossRef]
- Herring, T.A.; King, R.W.; Floyd, A.; McClusky, S.C. Documentation for the GAMIT GPS Analysis Software 10,70. In Massachusetts Institute of Technology Internal Report; Massachusetts Institute of Technology: Cambridge, MA, USA, 2018. [Google Scholar]
- Araszkiewicz, A.; Kiliszek, D.; Mierzwiak, M.; Nowak Da Costa, J.; Szołucha, M. GPS-Based Multi-Temporal Variation in Precipitable Water over the Territory of Poland. Remote Sens. 2021, 13, 2960. [Google Scholar] [CrossRef]
- Blewitt, G.; Lavallée, D. Effect of annual signals on geodetic velocity. J. Geophys. Res. 2001, 107, 2145–2156. [Google Scholar] [CrossRef] [Green Version]
- Masson, C.; Mazzotti, S.; Vernant, P. Precision of continuous GPS velocities from statistical analysis of synthetic time series. Solid Earth 2019, 10, 329–342. [Google Scholar] [CrossRef] [Green Version]
- Serpelloni, E.; Cavaliere, A.; Martelli, L.; Pintori, F.; Anderlini, L.; Borghi, A.; Randazzo, D.; Bruni, S.; Devoti, R.; Perfetti, P.; et al. Surface Velocities and Strain-Rates in the Euro-Mediterranean Region From Massive GPS Data Processing. Front. Earth Sci. 2022, 10, 907897. [Google Scholar] [CrossRef]
- Herring, T. MATLAB Tools for viewing GPS velocities and time series. GPS Solut. 2003, 7, 194–199. [Google Scholar] [CrossRef]
- Reilinger, R.; McClusky, S.; Vernant, P.; Lawrance, S.; Ergintav, S.; Cakmak, R.; Ozener, H.; Kadirov, F.; Guliev, I.; Stepanyan, R.; et al. GPS constraints on continental deformation in the Africa-Arabia-Eurasia continental collision zone and implications for the dynamics of plate interactions. J. Geophys. Res. 2006, 111, B05411. [Google Scholar] [CrossRef]
- Altamimi, Z.; Rebischung, P.; Metivier, L.; Collilieux, X. ITRF2014: A new release of the International Terrestrial Reference Frame modeling nonlinear station motions. J. Geophys. Res. Solid Earth 2016, 121, 6109–6131. [Google Scholar] [CrossRef] [Green Version]
- Shen, Z.K.; Wang, M.; Zeng, Y.; Wang, F. Optimal Interpolation of Spatially Discretized Geodetic Data. Bull. Seismol. Soc. Am. 2015, 105, 2117–2127. [Google Scholar] [CrossRef] [Green Version]
- Steffen, R.; Legrand, J.; Ågren, J.; Steffen, H.; Lidberg, M. HV-LSC-ex^2: Velocity field interpolation using extended least-squares collocation. J. Geod. 2022, 96, 15. [Google Scholar] [CrossRef]
- Magyar, B.; Kenyeres, A.; Tóth, S.; Hajdu, I.; Horvath, R. Spatial outlier detection on discrete GNSS velocity fields using robust Mahalanobis-distance-based unsupervised classification. GPS Solut. 2022, 26, 145. [Google Scholar] [CrossRef]
- Heidbach, O.; Rajabi, M.; Cui, X.; Fuchs, K.; Müller, B.; Reinecker, J.; Reiter, K.; Tingay, M.; Wenzel, F.; Xie, F.; et al. The World Stress Map database release 2016: Crustal stress pattern across scales. Tectonophysics 2018, 744, 484–498. [Google Scholar] [CrossRef]
- Piña-Valdés, J.; Socquet, A.; Beauval, C.; Doin, M.-P.; D’Agostino, N.; Shen, Z.-K. 3D GNSS velocity field sheds light on the deformation mechanisms in Europe: Effects of the vertical crustal motion on the distribution of seismicity. J. Geophys. Res. Solid Earth 2022, 127, e2021JB023451. [Google Scholar] [CrossRef]
- Blewitt, G.; Hammond, W.C.; Kreemer, C. Harnessing the GPS data explosion for interdisciplinary science. Eos 2018, 99, 1–2. [Google Scholar] [CrossRef]
- Kenyeres, A.; Bellet, J.G.; Bruyninx, C.; Caporali, A.; de Doncker, F.; Droscak, B.; Duret, A.; Franke, P.; Georgiev, I.; Bingley, R.; et al. Regional integration of long-term national dense GNSS network solutions. GPS Solut. 2019, 23, 122. [Google Scholar] [CrossRef] [Green Version]
- Zurutuza, J.; Caporali, A.; Bertocco, M.; Ishchenko, M.; Khoda, O.; Steffen, H.; Figurski, M.; Parseliunas, E.; Berk, S.; Nykiel, G. The Central European GNSS Research Network (CEGRN) dataset. Data Brief 2019, 27, 104762. [Google Scholar] [CrossRef] [PubMed]
- Kreemer, C.; Blewitt, G.; Davis, P.M. Geodetic Evidence for a Buoyant Mantle Plume Beneath the Eifel Volcanic Area, NW Europe. Geoph. J. Int. 2020, 222, 1316–1332. [Google Scholar] [CrossRef]
- Jarosiński, M.; Bobek, K.; Głuszyński, A.; Durkowski, K. Present-day tectonic stress from borehole breakouts in the North-Sudetic Basin (northern Bohemian Massif, SW Poland) and its regional context. Int. J. Earth Sci. 2021, 110, 2247–2265. [Google Scholar] [CrossRef]
- Grad, M.; Polkowski, M. Seismic basement in Poland. Int J Earth Sci (Geol. Rundsch) 2016, 105, 1199–1214. [Google Scholar] [CrossRef] [Green Version]
- Mazur, S.; Aleksandrowski, P.; Gągała, Ł.; Krzywiec, P.; Zaba, J.; Gaidzik, K.; Sikora, R. Late Palaeozoic strike-slip tectonics versus oroclinal bending at the SW outskirts of Baltica: Case of the Variscan belt’s eastern end in Poland. Int. J. Earth Sci. (Geol. Rundsch) 2020, 109, 1133–1160. [Google Scholar] [CrossRef] [Green Version]
- International GNSS Service (IGS). Available online: https://igs.org/news/igs20/ (accessed on 25 January 2023).
- Anastasiou, D.; Ganas, A.; Legrand, J.; Bruyninx, C.; Papanikolaou, X.; Tsironi, V.; Kapetanidis, V. Tectonic strain distribution over Europe from EPN data. Geophys. Res. Abstr. 2019, 21, EGU2019-17744-1. [Google Scholar]
- Wessel, P.; Luis, J.F.; Uieda, L.; Scharroo, R.; Wobbe, F.; Smith, W.H.F.; Tian, D. The Generic Mapping Tools version 6. Geochem. Geophys. Geosystems 2019, 20, 5556–5564. [Google Scholar] [CrossRef] [Green Version]
- Inkscape. Available online: https://inkscape.org/ (accessed on 10 December 2022).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}












| Group | Parameter Notes |
|---|---|
| Software | GAMIT |
| Observations | GPS, ionosphere-free code and phase combination |
| Orbits | IGS08 *, IGS14 |
| Antenna models | transmitters: IGS08 *, IGS14 receivers: individual calibrations for ASG-EUPOS and selected EPN stations; IGS08 *, IGS14 for the rest |
| Clocks | Estimated |
| Ionosphere | “iono-free” + higher order |
| Troposphere | VMF1 as an a priori, 1 h ZTD estimated and 24 h gradient |
| Tidal displacement | IERS2010, FES2004 |
| Reference frame | ITRF2014 through 25 EPN stations |
| Variant | Time Span | Number of Stations | Description |
|---|---|---|---|
| A1 | June 2008–December 2021 | 440 | Full period, at least 3 years |
| A2 | January 2014–December 2021 | 424 | Common period, at least 3 years |
| A3 | January 2014–December 2021 | 344 | Common period, at least 5 years |
| A4 | January 2014–December 2021 | 159 | Common period, at least 6.5 years |
| A5 | January 2014–December 2021 | 392 | Common period, at least 3 years, igs14 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Araszkiewicz, A. Integration of Distributed Dense Polish GNSS Data for Monitoring the Low Deformation Rates of Earth’s Crust. Remote Sens. 2023, 15, 1504. https://doi.org/10.3390/rs15061504
Araszkiewicz A. Integration of Distributed Dense Polish GNSS Data for Monitoring the Low Deformation Rates of Earth’s Crust. Remote Sensing. 2023; 15(6):1504. https://doi.org/10.3390/rs15061504
Chicago/Turabian StyleAraszkiewicz, Andrzej. 2023. "Integration of Distributed Dense Polish GNSS Data for Monitoring the Low Deformation Rates of Earth’s Crust" Remote Sensing 15, no. 6: 1504. https://doi.org/10.3390/rs15061504