1. Introduction
Underwater acoustic sensor networks (UASNs) have been widely used in oceanography data collection, ocean surveillance and disaster warning [
1,
2,
3]. Data-collection-oriented UASNs, which are used for sampling high-precision underwater information, have attracted significant interest in recent years [
4].
However, UASNs must confront many challenges to become a promising technique. Because electromagnetic signals do not work well due to their rapid attenuation in water, acoustic communication is a superior method for long-distance underwater communication [
5]. Compared with radio signals, acoustic signals are subject to long and variable propagation delay, limited bandwidth, and high energy costs [
6,
7,
8]. These special characteristics pose great challenges for protocol design in UASNs.
The media access control (MAC) protocol solves the problem of multi-user channel sharing and avoiding packet collisions. Due to high delay and high transmission power costs, underwater collision can severely reduce throughput and increase power consumption. Hence, some existing MAC protocols have been proposed [
9,
10], in which the sink node arranges collision-free scheduling for all nodes. One drawback of these protocols is that they were originally designed for single-hop networks. However, due to the limits on acoustic transmission range, a single-hop network cannot cover a large area. Therefore, the data-collection-oriented UASNs are usually multi-hop networks, in which the data generated at the sensor nodes are transmitted to the sink node hop-by-hop. An interference-aware data transmission protocol named the cellular clustering-based interference-aware data transmission protocol (CIDP) is proposed in [
11]. This protocol employs a time division multiple access (TDMA) scheduling scheme to reduce interference and a layered routing scheme to achieve reliable data transmission in UASNs. Although this MAC significantly reduces interference in a multi-hop network, the relay nodes that are deployed are dedicated solely to packet forwarding, which is a waste of node resources.
A data-collection-oriented UASN consists of a sink node and many sensor nodes. All sensor nodes transmit the collected data in the direction of the sink node. The directional transmission of packets may lead to the traffic load in the network becoming non-uniformly distributed. That is, the closer to the sink node, the more data are handled by the sensor node. This will result in unfairness in how nodes at different depths send their own generated data. However, most existing MAC protocols do not consider the depth-based load imbalance in UASNs. The depth-based routing MAC (DBR-MAC) [
12] introduced a depth-based scheme into the design of UASNs for the first time. It adopted a depth-scheduling algorithm to give priority to key nodes in the conflicting domain to access the channel. However, due to the long-delay hidden terminal problem, it cannot avoid conflicts by listening to the transmissions of neighbors.
In UASNs, the traffic load in each node exhibits dynamic characteristics [
13]. Therefore, it is necessary to consider the time-varying traffic load to improve the adaptability of the MAC. One possible method is to construct a new schedule tailored to the new traffic pattern whenever the traffic load changes. However, identifying new traffic patterns and broadcasting a new schedule over the network require both sensor nodes to communicate with each other, which introduces extra energy and delay, particularly when the traffic load changes frequently. Another way to adapt to dynamic traffic load is to use hybrid protocols. The underwater practical MAC (UPMAC) [
13] attempts to be adaptive to the network load conditions by providing two modes and switching between them based on different loads being offered. The hybrid MAC protocols achieve good performance in single-hop networks. However, when these hybrid MAC protocols are extended to multi-hop networks, it is possible for a node to execute multiple protocols simultaneously, which can cause transmission conflicts. Therefore, it is desirable to propose an effective method to adapt to the traffic dynamics in the network.
To address the issues mentioned above, we propose a traffic-aware fair MAC protocol (TF-MAC) for data-collection-oriented UASNs. In this paper, we consider a layered data-collection-oriented UASN with a tree topology, in which nodes of different depths represent different layers. In TF-MAC, the sink node employs a TDMA scheme to schedule the time slots for the nodes of each layer. This is performed to avoid the possibility of vertical collision occurring between nodes located in adjacent layers. To avoid horizontal conflict that may occur when the nodes of the same layer are transmitting to the nodes of the upper layer, a multi-channel mechanism is adopted. Therefore, TF-MAC ensures collision-free transmissions and receptions of DATA packets.
The main contributions of this paper can be summarized as follows:
In order to improve fairness, we allocate different time slot lengths for each layer. An overlapping time slot division mechanism is employed. This mechanism allows layers that are two layers away from each other to communicate in parallel without interfering.
TF-MAC allocates the subchannel to the underwater nodes based on the protocol interference model. Then, power control is carried out for each node based on the physical interference model, which ensures no interference while reducing energy consumption.
To improve performance in traffic load time-varying situations, we design an adaptive packet length algorithm based on the spatial-temporal uncertainty of underwater channels. Each node is aware of traffic load changes to adaptively update packet length, which is not achieved in other MAC protocols.
The remainder of this paper is organized as follows. In
Section 2, we introduce the related work.
Section 3 introduces the system model. In
Section 4, the TF-MAC protocol is described in detail. In
Section 5, we present a sea experiment to verify the spatial-temporal uncertainty. In
Section 6, the simulation results are shown and discussed. Finally, we conclude this paper in
Section 7.
2. Related Work
There has been intensive design of traffic aware and fair MAC protocols for terrestrial sensor networks. The rate-based Fair-Aware Congestion Control (FACC) [
14] protocol can control congestion and achieve an approximately fair bandwidth allocation for different flows. The rate-aware congestion control (RACC) [
15] protocol improves congestion by establishing congestion levels and source rate regulation. However, due to the high energy consumption and high propagation delay of UASNs, the techniques currently developed on terrestrial sensor networks are not applicable to the acoustic communication medium of UASNs.
In the past decades, many MAC protocols have been proposed for UASNs, which can be classified into two categories: contention-based and contention-free [
16]. In contention-based protocols, nodes access the channel at random. In the contention-free protocol, the nodes access the channel according to a predetermined schedule.
The contention-based protocols can be divided into random-access protocols and channel-reservation protocols with handshakes. Aloha [
17] is a typical random-access MAC protocol, and has excellent delay performance. The throughput of slot-Aloha [
18] is improved by introducing guard time to Aloha. The delay-aware probability-based MAC (DAP-MAC) [
19] improves the throughput by taking advantage of the long propagation delay and enabling concurrent transmissions within the same time slot. However, the collision probability of random-access protocols increases exponentially with the increase in network load. Although these methods avoid sending-side conflicts, they can still cause receiving-side conflicts due to the hidden terminal problem. The hidden terminal problem means that the terminal is hidden when it is within the range of the intended receiver but out of the range of the sender. To solve the problem that the random-access method cannot effectively avoid conflicts, protocols based on channel reservation are proposed, such as slotted floor acquisition multiple access (SFAMA) [
20]. SFAMA introduces time slot division on the premise of retaining the floor acquisition multiple access (FAMA) protocol control package. However, the time cost of the handshake process is very high, resulting in low channel utilization. The multi-session FAMA (M-FAMA) [
21] uses neighboring nodes’ propagation delay maps and expected transmission schedules to initiate multiple concurrent sessions. However, the handshake process before sending the packet brings extra delay. In addition, the handshake process is based on a random-access scheme, which cannot achieve significant throughput in multi-hop and high-traffic scenarios.
In contention-free MAC protocols, network resources are reserved for specific users. They allow nodes to share communication resources based on frequency, code, or time. TDMA has been widely used in UASNs due to its collision-free characteristic. The graph coloring MAC (GC-MAC) [
22] is a TDMA-based MAC protocol. It assigns different colors which signify specific time-slots to every particular sensor node in the network, in which nodes of the same color can transmit data at the same time without collision. The efficient depth-based MAC (ED-MAC) proposed in [
23] is based on a duty-cycle mechanism and uses a time-division method to access the channel. It allocates time slots according to the depth priority of each node and divides each time slot into several subslots to avoid possible conflicts caused by hidden terminals. It realizes parallel transmission by reusing part of the time slots, enabling the channel to be used more effectively in the TDMA network. However, subslots lead to low throughput and long access delay, especially in dense networks. In [
24], the authors introduced a dynamic and flexible spatial-reuse strategy for the TDMA protocol design. To achieve high spatial reuse efficiency, they proposed two interference-free graph-based TDMA (IG-TDMA) protocols based on interference-free graph (IG) clustering algorithms. The spatial-temporal MAC (ST-MAC) [
25] constructs a spatiotemporal conflict graph to represent the conflict delay between transmission links. The scheduling is then obtained by solving a vertex coloring problem of spatial-temporal conflict graph (ST-CG).
Multi-channel-based MAC protocols are another major category of contention-free MAC protocol that have received a lot of attention. Using a multi-channel mechanism can reduce transmission conflicts because competing nodes are distributed over different channels. The multiple-rendezvous multichannel MAC (MM-MAC) [
26] is a multi-channel MAC protocol for UASNs. This protocol uses the concept of cyclic quorum systems to solve the multi-channel problem. MM-MAC successfully reduces transmission collisions but does not work well in a bursty traffic network. The cooperative underwater multichannel MAC (CUMAC) [
27] uses the cooperation of neighboring nodes for collision detection and a simple tone device to alleviate the triple hidden terminal problems. Although this protocol aims to provide conflict-free communication, the additional hardware increases the system cost. The hybrid collision-free medium access (HCFMA) [
28] adopts multi-channel technology, in which the exchange of control packets and data transmission can be separated, increasing the throughput of the network. However, this protocol only considers the single-hop network. In the energy efficient multichannel single rendezvous MAC (MC-UWMAC) [
29], the control channel uses a TDMA-based time slot allocation mechanism to ensure close to two-hop conflict-free time slot allocation. In addition, MC-UWMAC uses a quorum-based data channel allocation procedure to make data transmission take place in a unique data subchannel reserved for a pair of neighboring nodes.
Scheduling is the main challenge facing contention-free MAC protocols underwater. Because the scheduling decision is usually made by the sink node, the most practical network type suiting contention-free MAC protocols is the centralized type. The staggered TDMA underwater MAC Protocol (STUMP) [
30] is a centralized protocol-based TDMA. STUMP leverages propagation delay information to increase channel utilization by allowing concurrent data transmissions from several nodes..
With the development of MAC protocol research, some hybrid schemes have been proposed. They take advantage of the fact that scheduling schemes can eliminate conflicts, while random schemes can adapt to changing traffic load. The data-collection-oriented (DCO-MAC) [
31] is a hybrid MAC protocol for two-tier UASNs, where a contention-based MAC protocol is performed in the lightly loaded sub-network, and a reservation-based MAC protocol is carried out in the heavily loaded sub-network.
Most of the protocols mentioned above are based on a general self-organizing communication scenario. They do not focus on specific application scenarios, but attempt to be flexible and capture a wide range of potential practical applications. As a result, operational efficiency is often sacrificed for the operational generality in MAC design. In many practical applications, such as environmental monitoring and disaster warning, the main task of the system is to collect sensing data from sensor nodes to the sink node. They are data-collection-oriented UASNs, which can be seen as centralized networks. Tailored for underwater data-centric scenarios, the data-centric multi-hop MAC (DC-MAC) [
32] uses a multi-channel strategy to eliminate the hidden terminal problem and a dynamic collision-free polling strategy to provide efficient channel allocation. However, all sensor nodes are anchored to the bottom of the ocean, which is not applicable for data collection in multi-hop networks. In any event, designing an appropriate MAC protocol is important for application-oriented UASNs.
4. Protocol Description
This section begins with an overview of TF-MAC. Then, a detailed description is given.
4.1. Protocol Overview
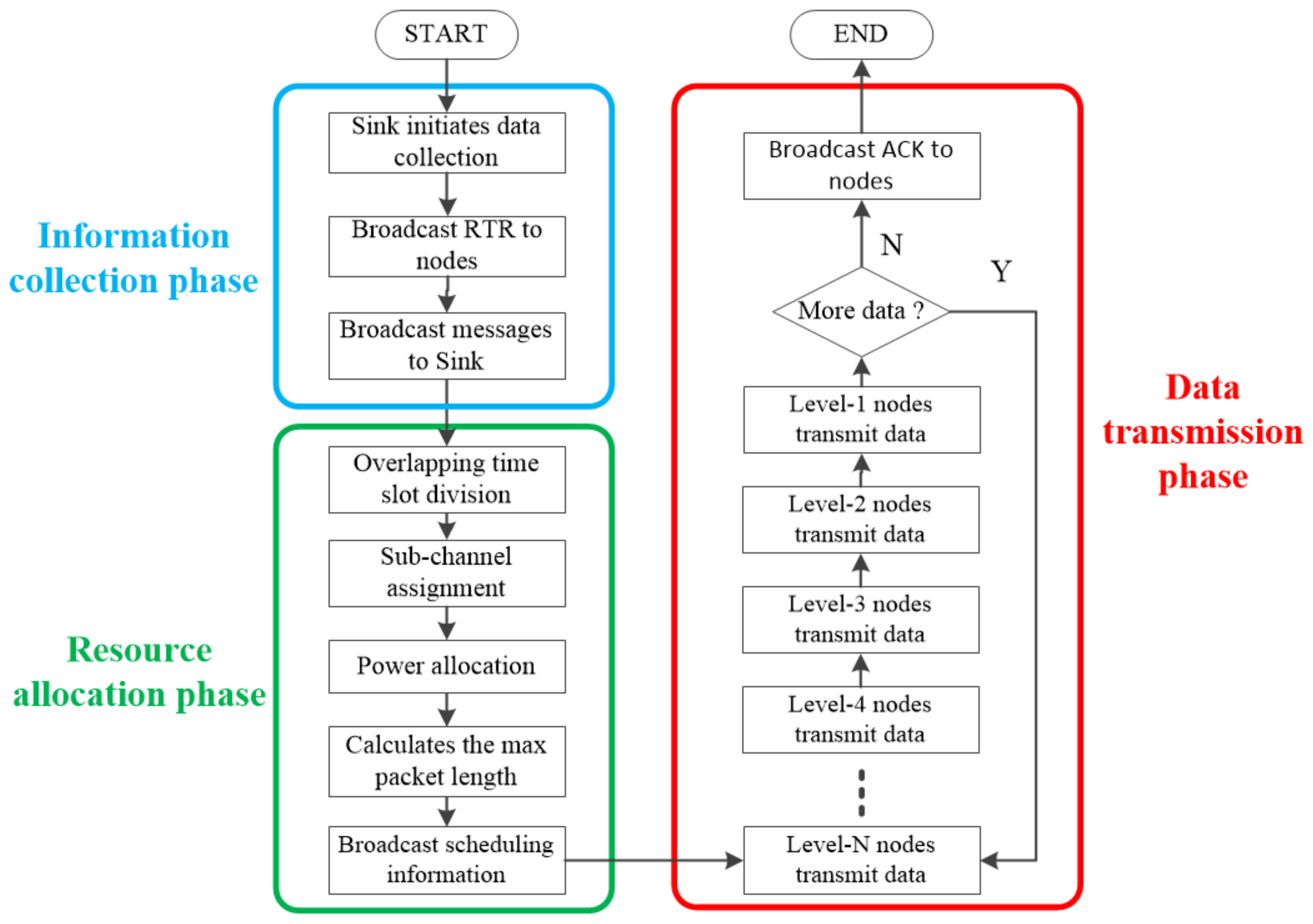
TF-MAC includes three phases: an information collection phase, a resource allocation phase, and a data transmission phase.
Figure 2 shows a flowchart for TF-MAC.
In data-collection-oriented UASNs, the data collection activities are initiated by the sink node. When the sink node wants to initiate data collection, it needs to broadcast a request to receive (RTR) packet. The RTR packet serves to wake up the lower layer nodes layer-by-layer. Until the anchor nodes receive the RTR packet, starting from the lowest layer, the nodes with data to be sent will broadcast the information packets to the upper layer. This information packet contains the node ID, node coordinate and node layer number. Then the packets are forwarded layer-by-layer to the sink node.
After the sink node receives the complete information, the network enters the resource allocation phase, which aims to make resource scheduling decisions for each node in the network. First, the overlapping time slot division mechanism is used to assign different slot lengths to the nodes of each layer. Then, a channel and power allocation algorithm is run for each layer respectively, and the subchannel and transmission power are assigned to each individual node of each layer. Finally, to realize the adaptive packet length algorithm based on traffic load in the data transmission phase, the maximum packet length of each node is calculated according to the distance between each node and the expected receiving node. After the sink node has come to a resource scheduling decision, the scheduling information is broadcast to the underwater nodes layer-by-layer. At the end of this phase, each underwater node in the network gets the resource information assigned to it. The length of the phase is not fixed, but it should be long enough to ensure that all underwater nodes get their resource scheduling information.
The data transmission phase is divided into many rounds, each of which consists of overlapping time slots. TDMA between different layer nodes and multi-channel communication between nodes of the same layer are used to avoid vertical and horizontal interference. They enable both vertical and horizontal parallel communication. We consider non-aggregate scheduling for underwater data collection, which means there is no such requirement to decide who always has the priority to transmit first between different layers. Therefore, although the data transmission in
Figure 2 is carried out layer-by-layer, the actual situation is not strictly ordered between layers. In the process of data transmission, each node can adjust the length of sending packets according to the adaptive packet length algorithm. If the sink node no longer needs to collect data, an acknowledgment (ACK) packet will be broadcast to the underwater nodes to end the data transmission phase.
4.2. Overlapping Time Slot Division
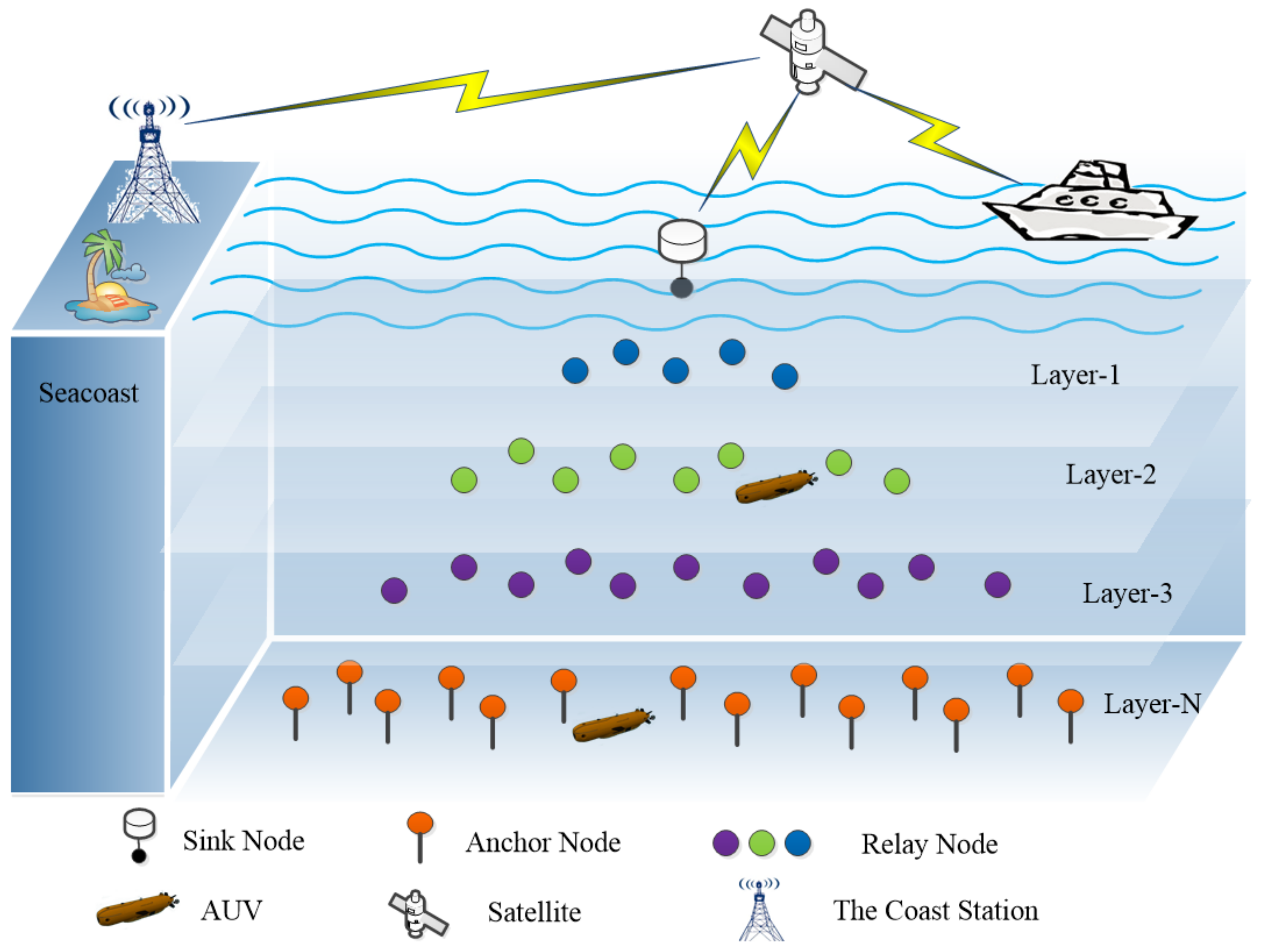
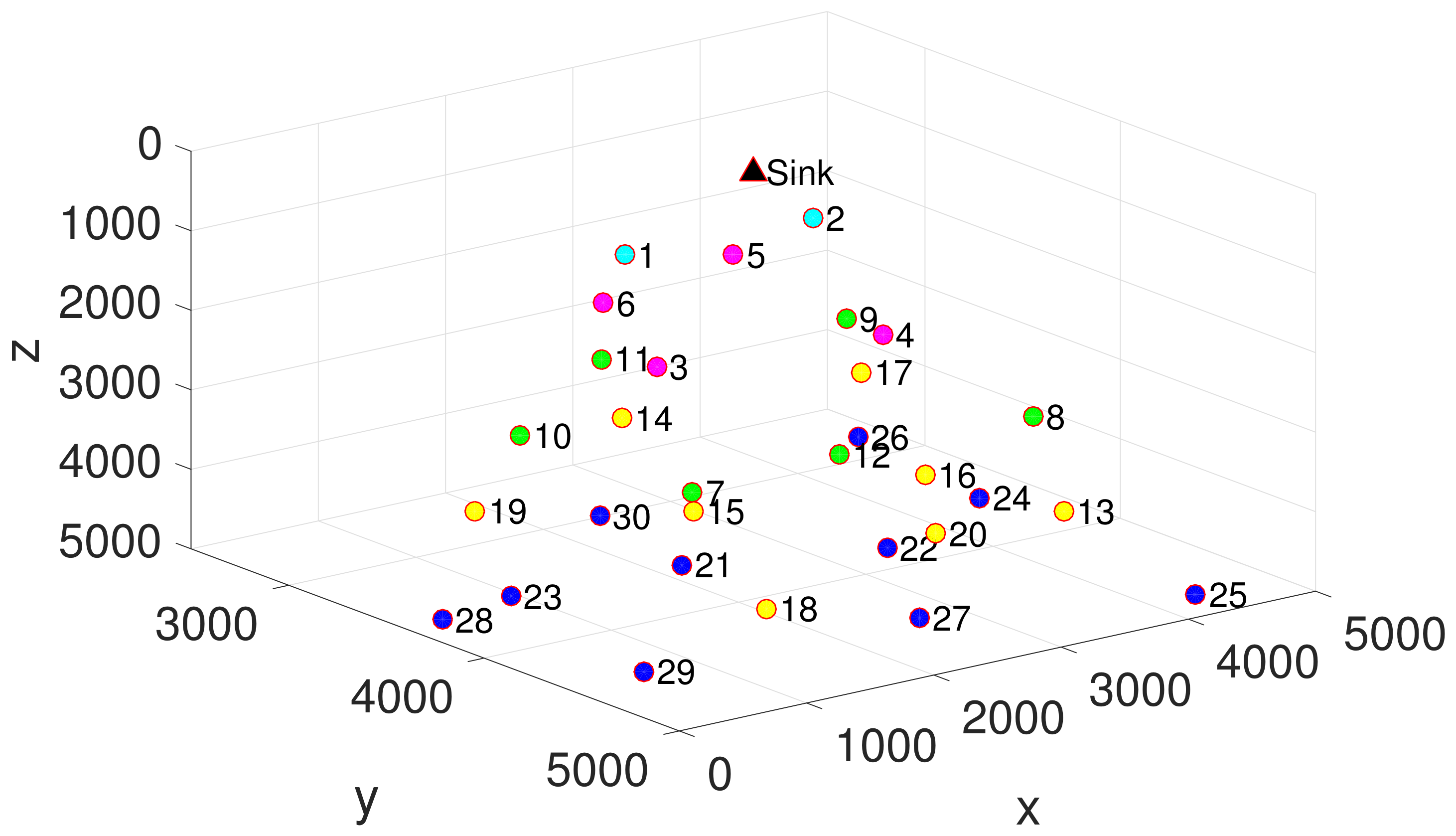
In the network described in
Figure 1, the closer to the sea surface, the more data are carried by the underwater node. If a relay node is responsible for forwarding the data from
m nodes of the lower layer, then the data size it needs to send in each round can be calculated by Equation (
5). Therefore, to improve the fairness of nodes of different depths sending their own data, slots of different lengths are assigned to nodes of different layers. Nodes in the same layer have the same time slot.
where
is the data size of node
i in the lower layer, with unit of bits.
is the data size generated by the relay node itself.
In TF-MAC, the DATA packet mainly contains the synchronization header, the sending node ID, the destination node ID, the data size, and the data to be transmitted.
Figure 3 shows the DATA packet format. In a network with
N layers, since the anchor node has no forwarding task, the data size in each packet of the anchor node is
. Then, according to the quantitative relationship of nodes between adjacent layers, the data size is successively allocated to the upper layers. The data size in a single packet of layer—
L is calculated by Equation (
6). After calculating the data size of each layer, the length of DATA packet can be calculated according to the DATA packet format.
where
is the number of layer—
/layer—
L.
is the data size in the packet of layer—
.
After determining the packet length
allocated for each layer, we can calculate the time slot length
of each layer accordingly. The maximum propagation delay should be taken into account to ensure that the DATA packet is fully received at the destination node [
37]. The maximum propagation delay
is usually calculated by
, and
is the speed of sound in water. However, due to the variation in underwater environmental parameters (e.g., temperature, salinity, and pressure) with depth, the distribution of
is variable [
38]. Moreover, there are also affects of the sea waves movements [
39] that can cause propagation delays to be variable in different sea layers. Therefore, we need to consider adding protection time slots when performing time slot division. The time slot length of nodes at layer—
L can be calculated by Equation (
7).
where
is the length of the short frame protection interval.
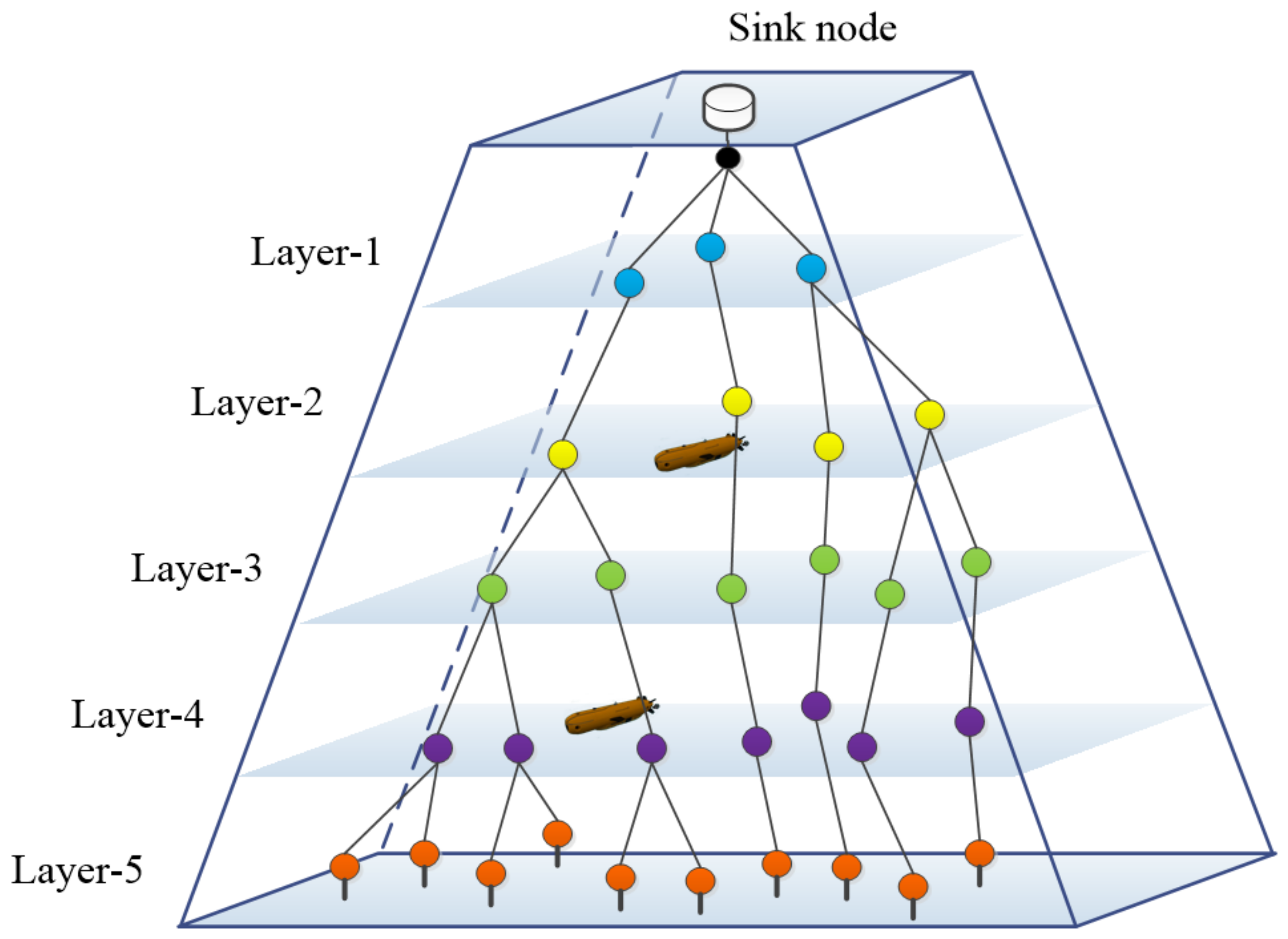
Figure 4 shows a five-hop data collection network, assuming that the transmission path of the entire network is established. We can observe that layers separated by two layers can simultaneously transmit data to nodes in the upper layer without conflict, such as layer-5 and layer-2. Thus, in every round, the time slots of nodes two layers apart can overlap.
Figure 5 shows the time slot distribution for each round of the five-hop data collection network in
Figure 4. The closer the layer is to the water surface, the longer the time slot. Through overlapping time slot division, the nodes of different levels can communicate in parallel in vertical direction. The throughput is improved and the end-to-end latency is significantly reduced.
4.3. Channel and Power Allocation Algorithm
In this subsection, we design the channel allocation algorithm and power control algorithm of TF-MAC.
4.3.1. Channel Allocation Algorithm
TF-MAC is a multi-channel media access control protocol. The protocol interference model is used to simulate the interference environment. After the information collection phase, the sink node obtains the three-dimensional coordinates of all the underwater nodes in the network. Therefore, the distance between any two nodes can be calculated. The sink node allocates channels layer-by-layer from the anchor nodes upward. To allocate channels for nodes of layer—L, we first construct expected sending node tables for each node of layer— according to the maximum transmission range. If there is a sending node in the expected sending node tables of multiple nodes of the upper layer, it is kept only in the expected sending node table of the nearest node. The expected sending node tables represent the transmission links of the sending nodes to the upper receiving nodes.
Then, we construct the interference node tables for each node of layer— according to the interference range in the protocol interference model. The node of layer—L within the maximum interference range of the receiving node is put into the interference node table of the receiving node. By traversing the number of nodes in the interference node tables of the upper receiving nodes, the maximum number of nodes m within a single interference range can be obtained. In order to avoid horizontal collision of data transmission between nodes, we divide the channel into m subchannels with equal bandwidths. In addition, if there is a mobile node in this layer, the channel needs to be divided into m + 1 subchannels, where the mobile node is first allocated to the highest frequency subchannel.
Different nodes in the same layer have different priorities. Because the propagation loss of sound waves is dependent on distance and frequency, the propagation loss at high frequency is more severe than that of low frequency. Therefore, the priority of nodes is sorted according to their distance from the receiving node. The greater the distance from the expected receiving node, the higher the priority of the node. The nodes are allocated subchannels in order of priority from high to low. When allocating a subchannel to a node, the subchannel with the lowest center frequency is selected from the remaining assignable subchannels in the interference node tables to which the node is located.
An example of channel allocation for the nodes of layer-2 is given.
Table 1 presents the expected sending node tables and interference node tables constructed for the nodes of layer-1. For visual demonstration, we draw the interference diagram according to
Table 1, as shown in
Figure 6. The maximum number of nodes within a single interference range is three, and there is a mobile node in layer-2. Therefore, we divide the channel into four subchannels of equal bandwidth, which are CH = SC1, SC2, SC3, SC4 according to the frequency change from low to high. The priority list of the nodes in layer-2 is P = N1, N4, N3, N5, N2, N6. According to the channel allocation algorithm, the node with higher priority is allocated subchannels of lower frequency, and the allocation result is shown in
Figure 6. The channel allocation algorithm not only avoids the horizontal conflict of data transmission, but also provides the opportunity of parallel communication within a layer.
4.3.2. Power Control Algorithm
The channel allocation algorithm realizes conflict-free subchannel scheduling based on the protocol interference model. However, unnecessary transmission power can result in a wider interference range and energy waste. Therefore, a power control algorithm based on the physical interference model is designed to ensure the complete non-conflict of multi-channel transmission. Energy consumption is greatly reduced without sacrificing network connectivity.
The sink node runs the power control algorithm in a centralized way to allocate the transmitted power to nodes of each layer. We consider the decoding threshold
of the receiving node limited by the physical interference model to determine whether the receiver can receive successfully. Because the energy of the underwater nodes is limited, and to improve the space-reuse efficiency in the network, we minimize the total power sum of each layer. Therefore, the following optimization problem Equation (
8) should be solved to ensure that the total energy consumption of the nodes at layer
L is minimized.
where
is the total number of nodes in the layer—
L.
is the power allocated to the ith node in layer—
L.
is the maximum transmission power.
is the
at the expected receiving node of the
ith node in the layer—
L.
is the number of interfering nodes that have the same channel as the
ith node.
is the channel gain from the
ith node to its intended receiving node.
is the channel gain of the interfering node.
The channel allocation algorithm makes interference exist only between nodes that have the same subchannel. We divide the channel into
m subchannels at the layer—
L; thus, the optimization problem can be divided into
m suboptimization problems, which represent the power control between nodes allocated to the same subchannel, respectively. If there are a total of n nodes using SC1 in layer—
L, the suboptimization problem of power control of nodes allocated with SC1 can be expressed by Equation (
9).
In the suboptimization problem, the
of each node is related to the transmission power of the other interference nodes. By proof by contradiction, we can find that when the
term in the constraint is set to be equal, the suboptimization problem obtains the optimal solution. Therefore, the suboptimization problem can be solved by calculating the multivariate first order equations.
can be solved by Equation (
10). By solving the
m suboptimization problems, optimization problem Equation (
8) is solved.
If there is a mobile node in a layer, considering its mobility, we cannot determine with which upper receiving node it will establish a link nor the communication distance. Therefore, the maximum transmission power is allocated on its proprietary subchannel.
4.4. Adaptive Packet Length Algorithm
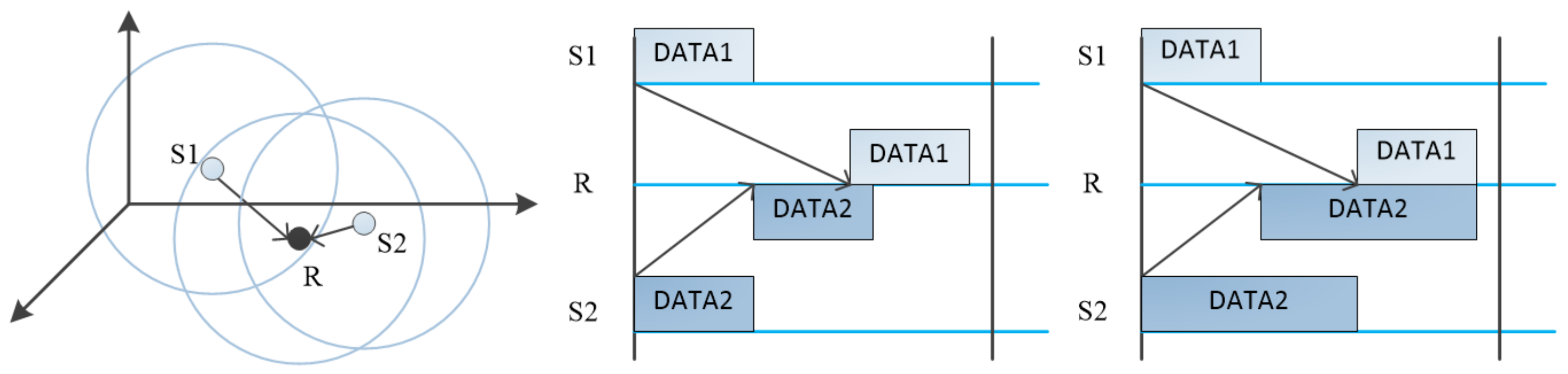
Different from the terrestrial wireless sensor network, the high propagation delay of underwater acoustic channels leads to serious spatial-temporal uncertainty in UASNs. As shown in
Figure 7, both sender 1 and sender 2 send packets to the same receiver. Since the distance between them and the receiver is different, their packets do not arrive at the receiver at the same time. In this case, there will be a conflict if sender 1 and sender 2 use the same channel. Since TF-MAC allocates different subchannels to nodes in the same interference range, there will be no packet conflict caused by the spatial-temporal uncertainty at the receiver.
Figure 7 shows that sender 1 and sender 2 send packets at the same time, but because sender 2 is closer to the receiver, it can send longer packets than sender 1 without causing conflicts between time slots. Therefore, considering the distance between the sending node and the expected receiving node and the dynamic of traffic load, we propose an adaptive packet length algorithm.
In the resource allocation phase, the sink node allocates uniform packet length to each layer according to the maximum propagation delay. However, considering the dynamic traffic load of the node, the sending node can adjust the length of the sending packet adaptively within an appropriate range. When the traffic load of the node increases, it adaptively increases the packet length, thus increasing the data size sent in a single time slot. When the traffic load of the node decreases, it adaptively reduces the packet length. However, the packet length of the sender cannot exceed the maximum packet length, which is calculated by Equation (
11).
where
is the uniform packet length allocated to node, and
d is the distance between the node and the expected receiver.
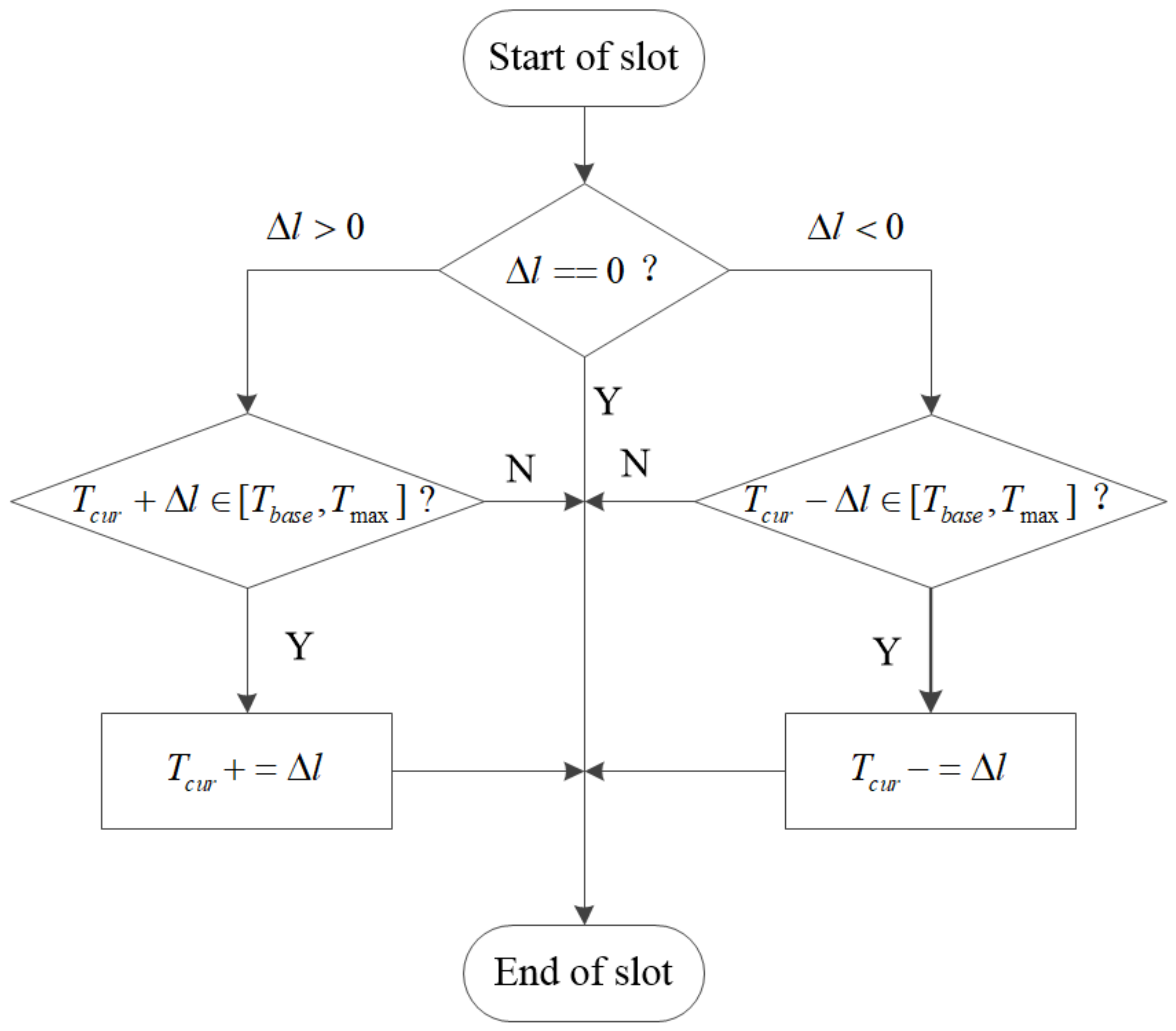
The proposed adaptive packet length algorithm is shown in
Figure 8. Each node has a buffer to hold data to be sent, whose size is fixed. If the buffer is full, newly generated data will overflow from the buffer, resulting in loss of data. At this point, increasing the length of the packet can effectively alleviate the loss of data and reduce the packet header overhead. If the traffic load is light, reducing the packet length can send the packet in a timely manner and thus reduce the end-to-end delay. This algorithm is an adaptive packet length algorithm based on a fixed gradient.
represents the fixed gradient, whose absolute value is fixed. Whether the sign of the fixed gradient
is positive or negative is determined by the gradient rise and gradient fall of the traffic load. If the amount of data in the buffer remains unchanged within a certain range, the fixed gradient changes to 0. The packet length
is updated adaptively at the beginning of the time slot. If
,
will increase; if
,
will decrease; if
,
will remain unchanged. The packet length cannot be less than the uniform packet length of the node nor greater than the maximum packet length.
The adaptive packet length algorithm can deal with the time-varying traffic loads of the nodes and improve the adaptability of the MAC protocol; thus, it can be used in many key applications of underwater data collection network.
5. Sea Experiment to Prove the Spatial-Temporal Uncertainty
We evaluate the spatial-temporal uncertainty of UASNs in a sea experiment using our existing underwater acoustic modems [
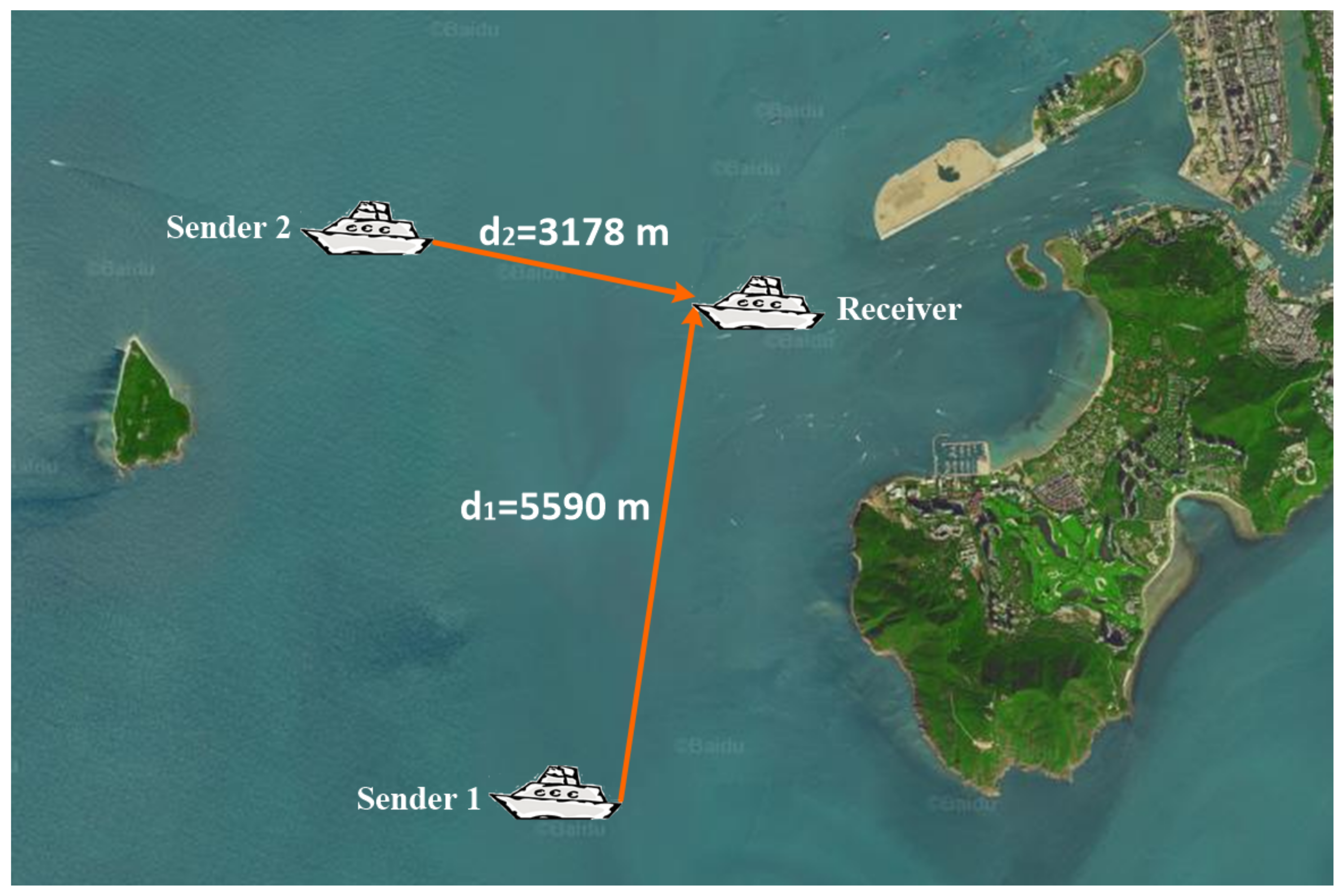
40]. It provides the feasibility for the adaptive packet length algorithm. Our experiment was conducted on 2 December 2020 in Sanya Bay, China. Three ships depart from the dock and anchor at their respective fixed locations, representing two sending nodes and one receiving node. By locating the ships on the map, we create the topology as shown in
Figure 9.
In the experiment, we use the framework of TDMA. Accurate time synchronization is achieved with Ublox GPS’s PPS second pulse. Senders 1 and 2 send packets of fixed length to the receiver. Each node sends two packets at a time, each 1.3 s in length and 1 s apart. The time between the two senders to start sending the first packet is 5 s.
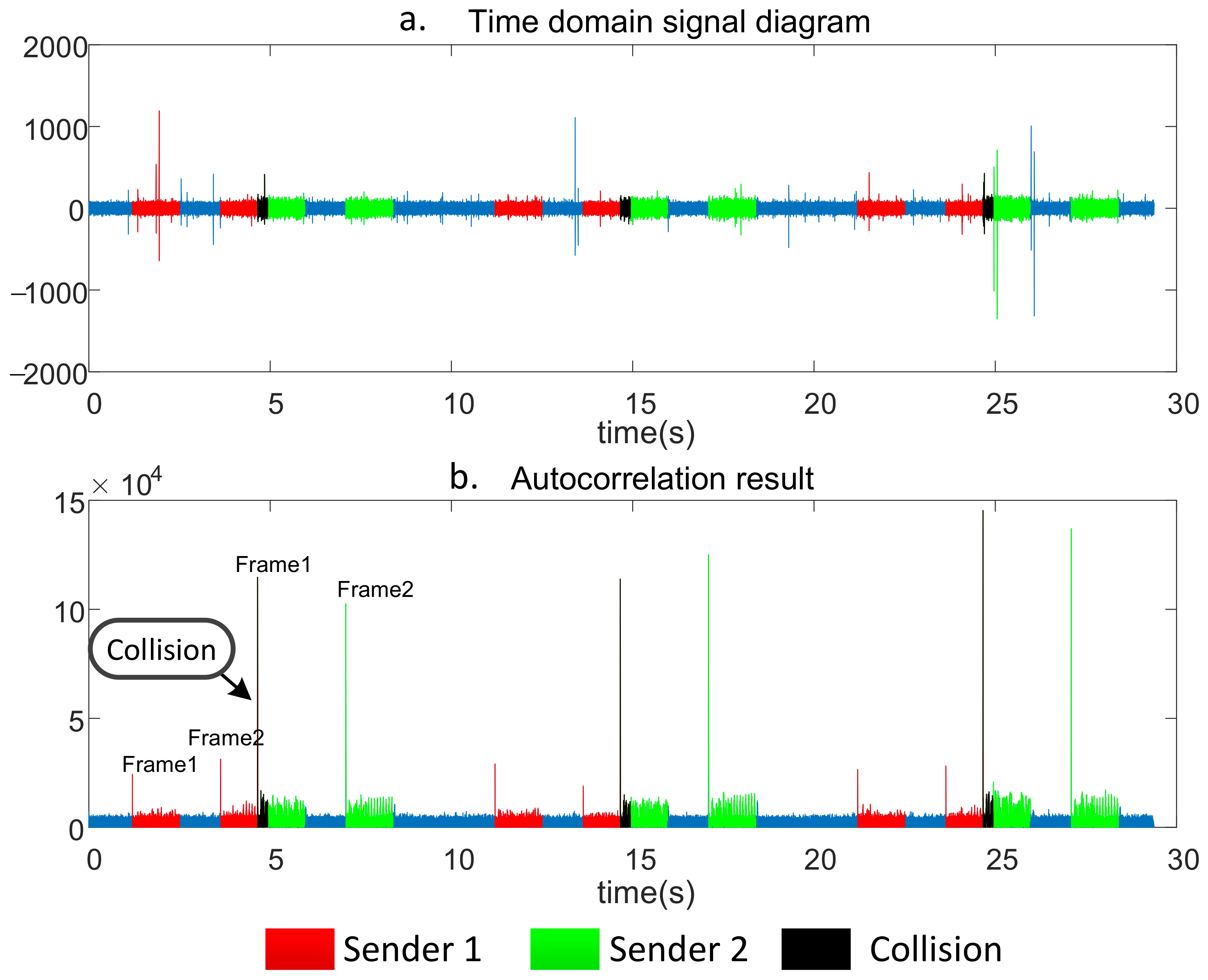
Figure 10 shows the signal received by the receiver.
Figure 10a is the time domain diagram of the received signal.
Figure 10b is the autocorrelation result of synchronous processing. As can be seen from
Figure 10, although both sender 1 and sender 2 send packets of the same length at the beginning of the slot, they still collide. The black part shows that the signal from sender 1 and the signal from sender 2 overlap and collide.
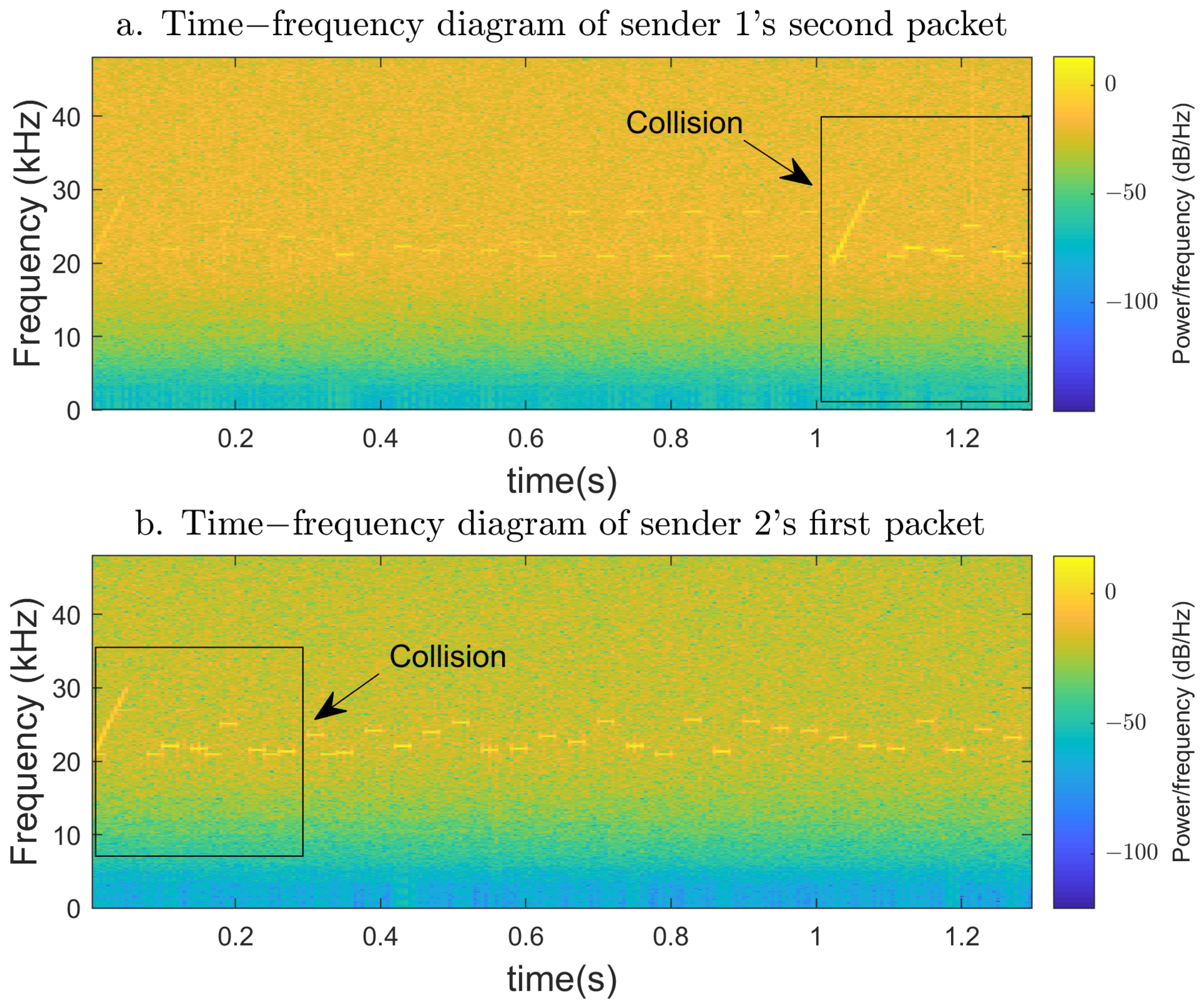
Then we analyze the error code problem caused by the collision at the receiver. As shown in
Figure 11a, the time-frequency diagram of the second packet sent by sender 1 for the first time is provided. The synchronization head from sender 2 begins to appear in 1 s of the packet. In addition, the codes that follow are also interfered with by other frequencies. We demodulated the signal and found that the 15th to 20th codes in the packet had errors.
Figure 11b provides the time-frequency diagram of the first packet sent by sender 2 for the first time. Although the energy of the signal from sender 2 is stronger than that from sender 1 due to the shorter distance, there is still interference from the signal from sender 1 at the beginning of the signal. However, because sender 2’s signal is more powerful, we found no packet loss due to interference with the synchronization head. After demodulation, the signal of sender 2 has no error due to collision.
Our experimental results show that spatial-temporal uncertainty of UASNs exists, which means the arrival time of packet is not only related to the sending time but also related to the distance between sender and receiver. Ignoring the spatial-temporal uncertainty of the underwater acoustic channel will result in packet collision and code error.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}