1. Introduction
Ocean surface waves, including wind waves and swell, can reach heights of tens of meters, travel thousands of miles, and cause serious threats to various marine activities, e.g., sea voyages [
1,
2,
3], ocean fishing [
4,
5], and oil exploitation [
6,
7,
8]. Ocean waves can also be intimately involved in the energy and material exchange between the atmosphere and the ocean, playing a crucial role in global and regional climate systems [
9,
10]. Moreover, wave energy, which is one of the most concentrated [
11] and highly available sources of marine renewable energy, can be considered a potential alternative in response to the gradual depletion of fossil energy resources.
Research and applications associated with the safety of offshore engineering structures, prevention of global warming, and harnessing of wave energy are highly dependent on the statistics of various wave characteristics, such as wave height, period, propagation direction, and spectral width. In particular, wave power density (WPD) is a crucial factor of importance to the wave energy industry. A series of wave datasets have been proposed to support such research and applications, e.g., the earlier ERA-Interim dataset [
12] that provides basic bulk wave parameters, such as significant wave height, mean wave period, and mean wave direction. The more recent ERA5 dataset [
13,
14,
15] and the EMC/NCEP wave hindcast dataset [
16] further exhibit the above-mentioned wave parameters in the form of wave systems, i.e., wind waves and swell. Furthermore, the long-term variation of the wave parameters with continuous spatiotemporal coverage can be generated via simulation using numerical wave models such as WAM [
17,
18] and WaveWatch III [
19,
20].
Most of the datasets mentioned above might have global coverage but with relatively low spatial resolution (typically, 0.5° × 0.5°
, which is unsuitable for supporting research and applications concerning wave characteristics in nearshore and island sea areas. Other than adopting finer resolution, specific modeling strategies that might also be considered for such wave environments include unstructured computational grids, algorithms to simulate shoaling and refraction, and the adoption of source terms that present shallow water effects on waves; sometimes, even a specific wave model should be selected, e.g., SWAN [
21,
22].
Nested wave modeling can be introduced to solve the above problems, i.e., the parent model with lower resolution provides the wave features in the outside ocean beforehand, and the corresponding child model later employs the information relating to the outside waves to simulate the conditions of the inner domain with specific resolution and strategies. In current third-generation wave models, the information exchanged across the boundaries between the parent and child domains comprises simulated two-dimensional (2D) frequency–directional wave spectra. However, saving and reading 2D spectra, each of which typically occupies a space of 35 (in frequency) × 36 (in direction) storage units on the boundary grid points, is burdensome, particularly in relation to long-term nested simulations. Therefore, both the size and the resolution of the boundaries must be designed carefully before initializing a simulation in case the storage of boundary spectra becomes computationally unaffordable. Moreover, such a large volume of stored boundary spectra cannot be reused in most cases if the child domain is changed.
Various solutions might be useful in alleviating the problem of spectrum storage. One such approach would be to run the parent and child simulations synchronously, e.g., the multigrid [
23] and mosaic approach [
24] introduced in WaveWatch III. By conducting the two simulations simultaneously, spectral information on the boundaries can be exchanged and abandoned immediately in the memory; thus, no spectra need to be saved. However, in such simulations, the adoption of specific individual modeling strategies or wave models for the parent and child simulations might become inconvenient.
Another way to avoid preserving boundary spectra in nested wave modeling is to reconstruct the 2D spectra with a parametric spectrum (e.g., a JONSWAP spectrum [
25] or a Pierson–Moskowitz spectrum [
26]) and a certain imposed directional distribution (e.g., a Mitsuyasu-type distribution [
27]). In such a reconstruction, only several wave parameters are needed, e.g., significant wave height, peak wave period, and main wave direction. Furthermore, such wave boundary information is acceptable in the SWAN model. However, parametric spectrum models have difficulty representing the characteristics of various wave spectra completely, and unpredictable errors might occur during the simulations, resulting in reduced accuracy in further analyses. Moreover, the properties of wave systems, i.e., wind waves and swell, can be totally ignored in such unimodal spectrum models.
Finally, the directional distribution can be estimated using Fourier coefficients. For example, by adopting the Maximum Entropy Method [
28], the directional distribution at each frequency of a typical 35 × 36 spectrum can be expressed by the first four Fourier coefficients; thus, the size of such a spectrum can be reduced to 35 × 4. However, having each spectrum require a storage space of 35 × 4 units is still extravagant in terms of operational wave simulations. Moreover, false values of the Fourier coefficients might be obtained from frequency bins that contain very low energy, resulting in spurious directional distribution estimations.
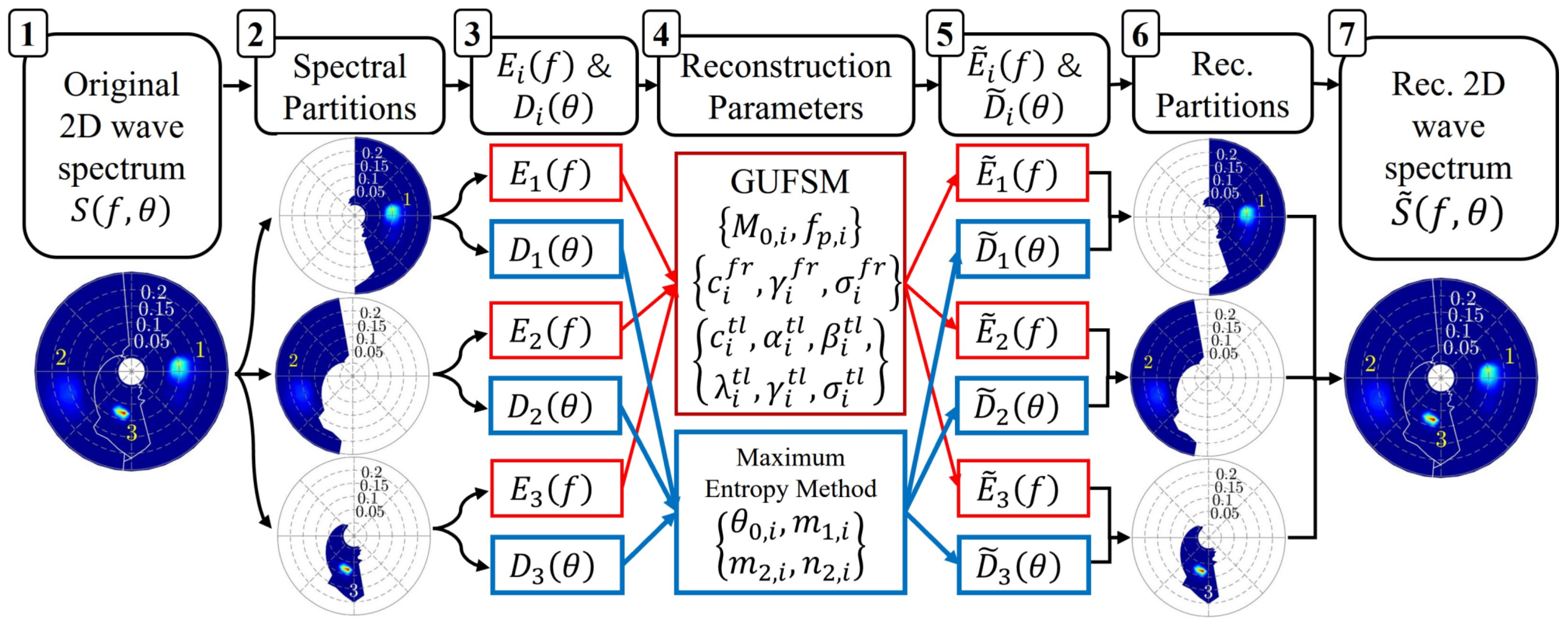
This paper presents a new approach for the preservation of 2D wave spectra. By introducing what are known as the Reconstruction Parameters (RPs), only dozens of storage units are needed to preserve a certain 2D spectrum. In conjunction with a corresponding reconstruction method, the spectra can then be rebuilt with intact spectral features. Experimental application confirmed that the reconstructed spectra could be adopted as boundary conditions in nested wave simulations.
The remainder of this paper is organized as follows. The steps of the proposed approach for the preservation and reconstruction of 2D wave spectra are presented in
Section 2, together with the settings used in the application experiments.
Section 3 provides comparisons between the original and reconstructed spectra and between the simulated results taking the two types of spectra as boundary conditions. Finally, a discussion and the derived conclusions are presented in
Section 4 and
Section 5, respectively.
4. Discussion
This paper presents a new approach for preservation and reconstruction of 2D wave spectra, whereby the reconstructed spectra can be applied as boundary conditions in wave nested modeling. Typically, preservation of a 2D spectrum at a certain boundary point might occupy 35 × 36 = 1260 storage units; however, using the proposed approach the storage needed could be reduced to a maximum of 60 units.
As mentioned above, a parametric wave spectrum with an imposed directional distribution can also be used to reconstruct nesting boundaries, and only several parameters are needed in such a reconstruction. For example, 2D spectra can be reconstructed using the functional form of the TMA spectrum [
54,
55] with the Mitsuyasu-type [
27] directional distribution. The TMA spectrum can be expressed as follows:
where
denotes the functional form of the JONSWAP spectrum [
25,
56]:
where
denotes the significant wave height,
indicates the peak frequency,
is the peakedness parameter, and
; in Equation (21),
[
54] is a function related to the wave number
and local water depth
as follows:
The Mitsuyasu-type directional distribution can be expressed as follows:
where
controls the directional spreading,
denotes the peak wave direction, i.e., the mean direction derived from the directional distribution at
, and
is a scale factor to ensure that
.
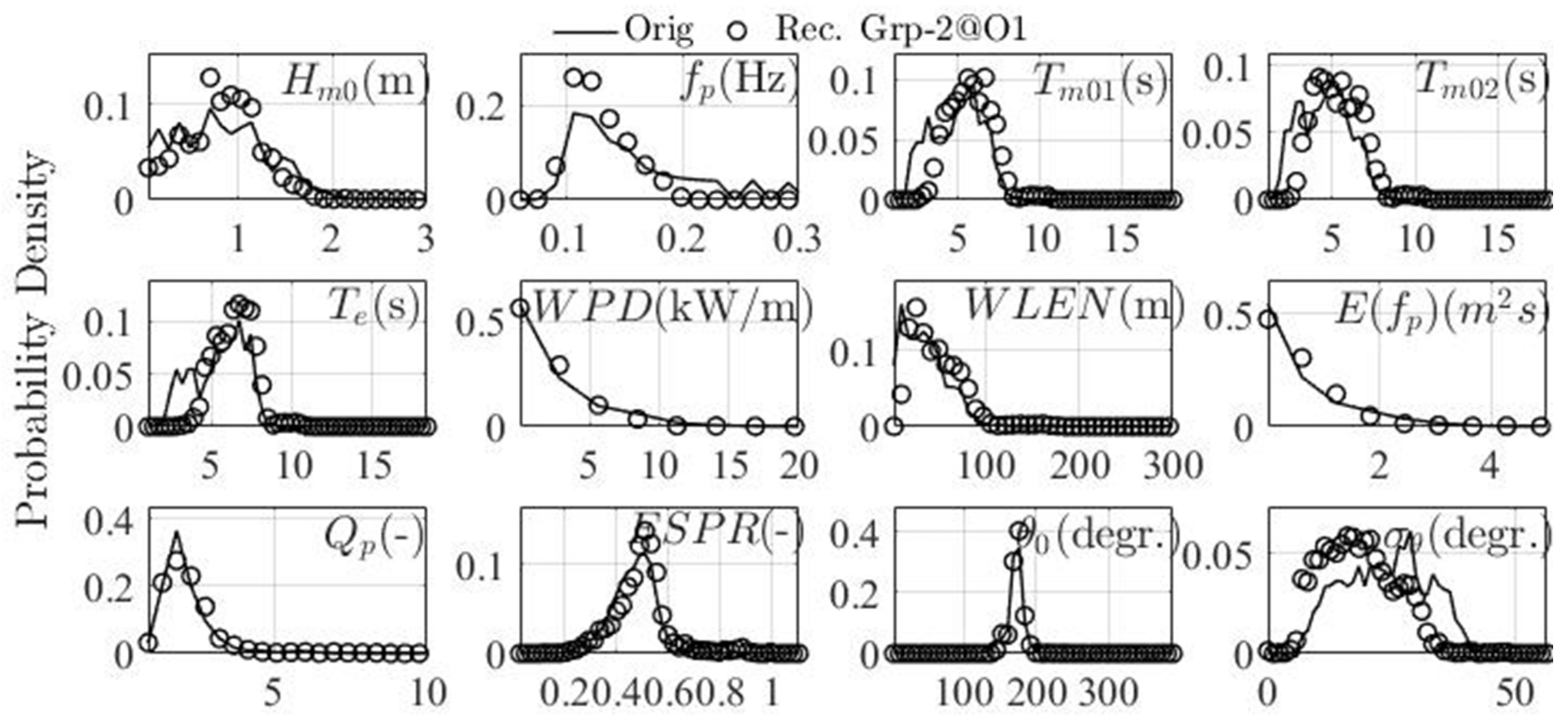
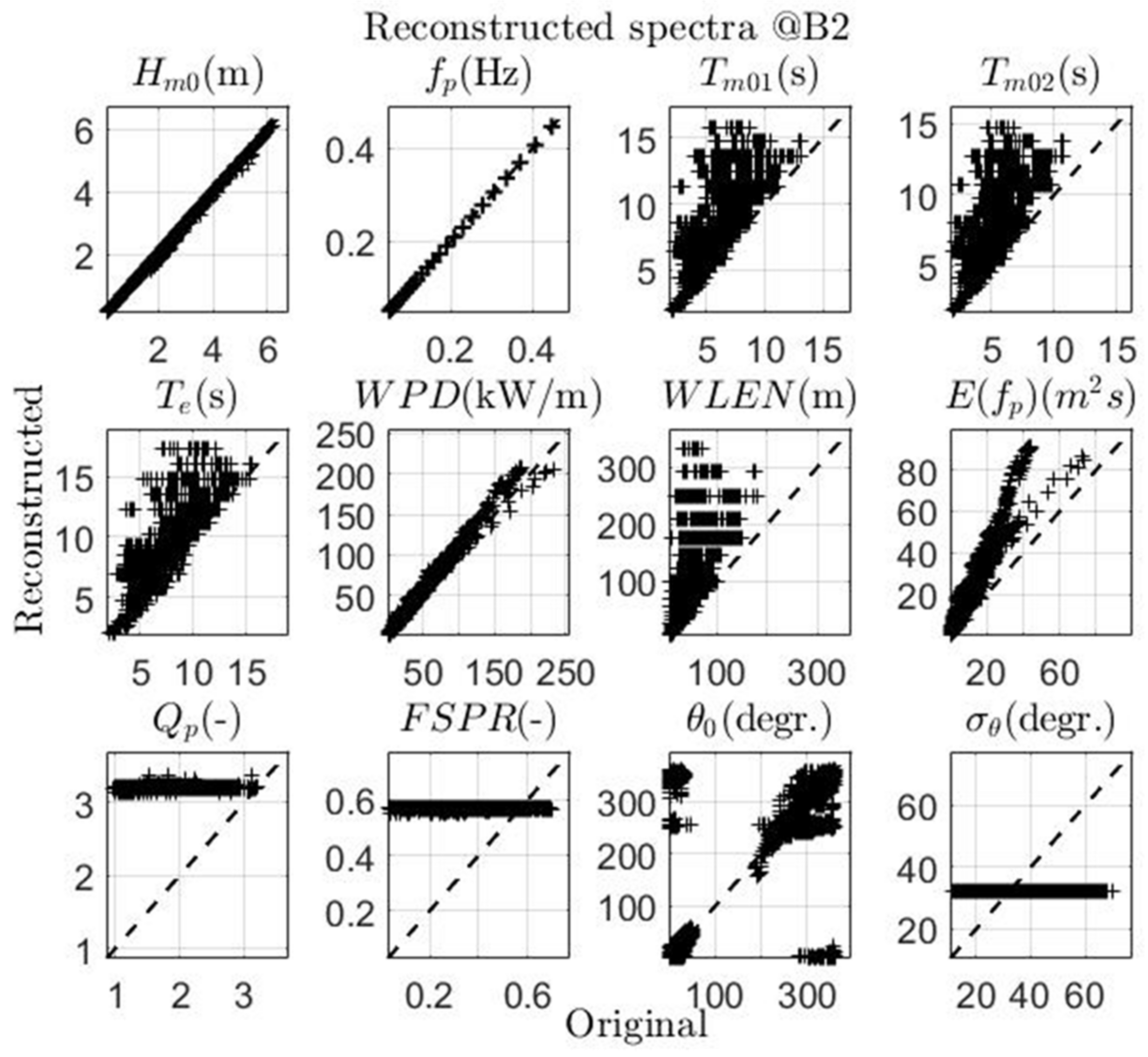
Figure 10 shows a comparison of the TMA–Mitsuyasu reconstructed and the original spectra at check point B2. For each reconstructed spectrum, the parameters needed are only
,
,
, and
, the latter three of which are calculated from the entire spectrum at the original boundaries,
is read from the bathymetric data at B2, and
is set as a constant owing to the lack of available information. The scatter plots and KPs in
Figure 10 are similarly arranged as those in
Figure 3 and
Figure 4.
Figure 10 shows that even though only four parameters are necessary in the reconstruction, the reconstructed spectra retain several features such as
,
, and
, that have acceptable agreement with the originals. The reconstructed KPs associated with wave period, wavelength, and peak spectral density present greater deviation from the originals as their values increase, as well as the mean wave direction. Furthermore, the characteristics of spectral width are limited at a fixed value because of the lack of relevant information input. Similar results at the other check points (
Figures S13–S15 for points B1, B3, and B4, respectively) on the boundaries can be found in the
Supplementary Material.
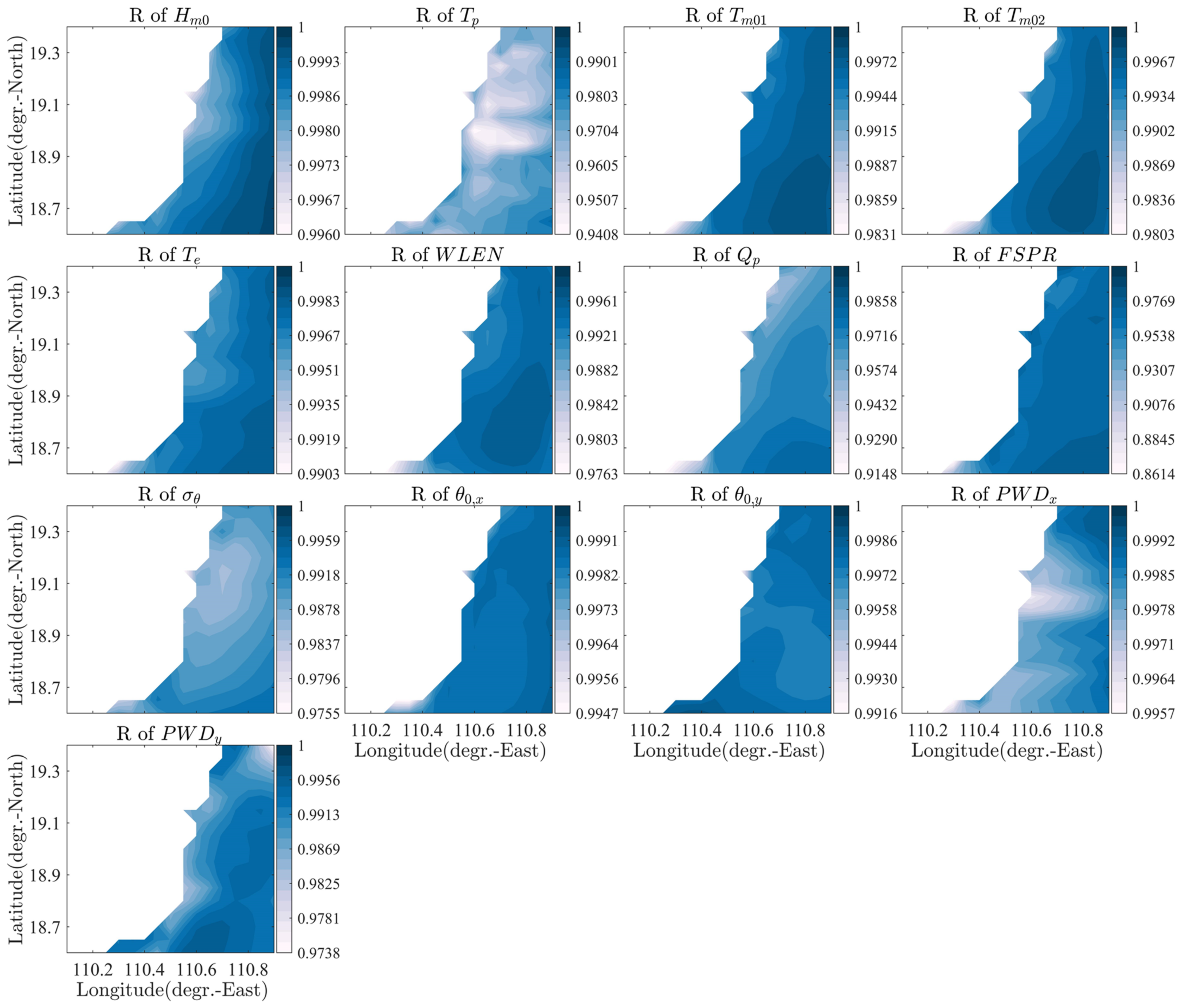
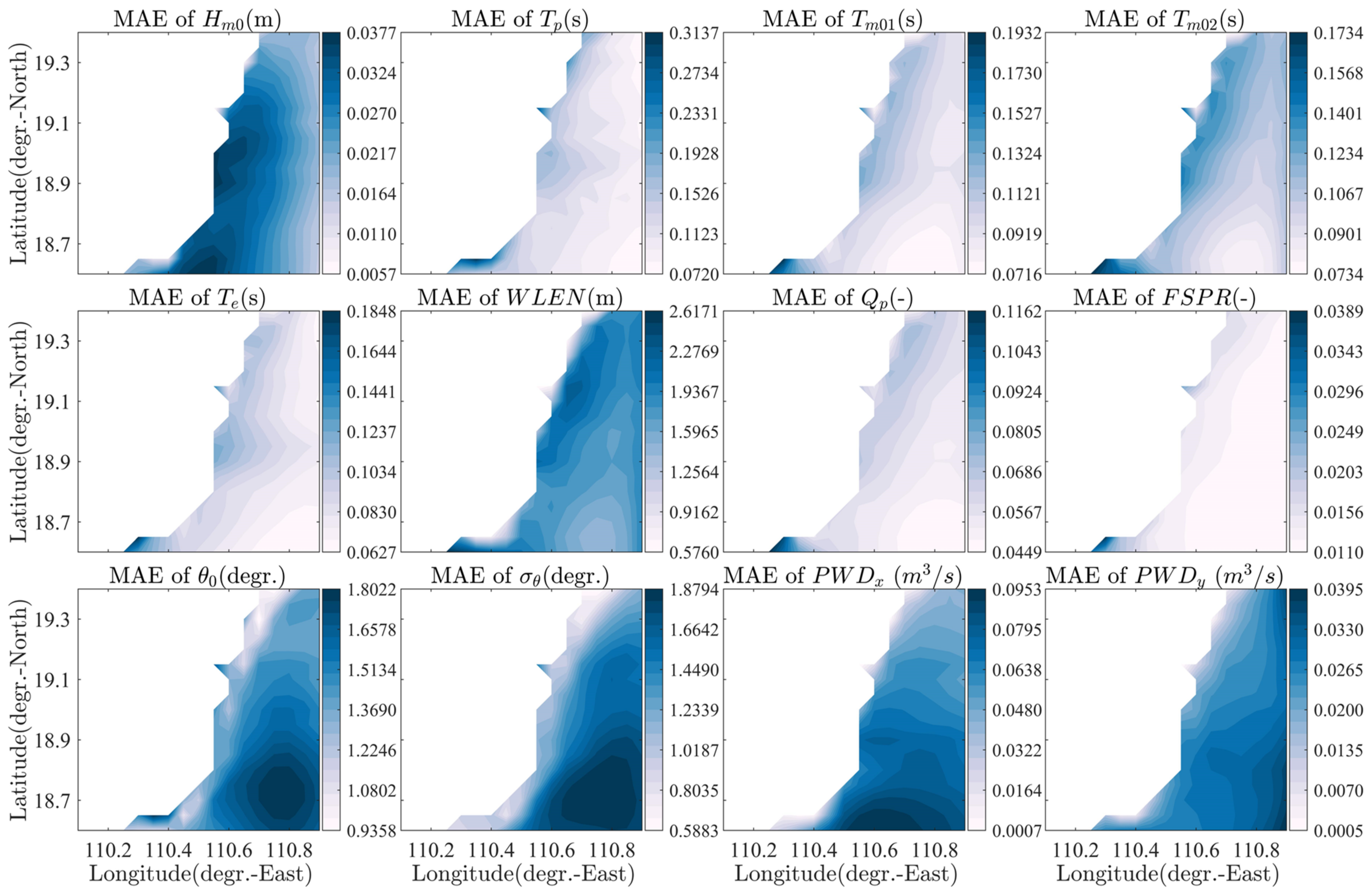
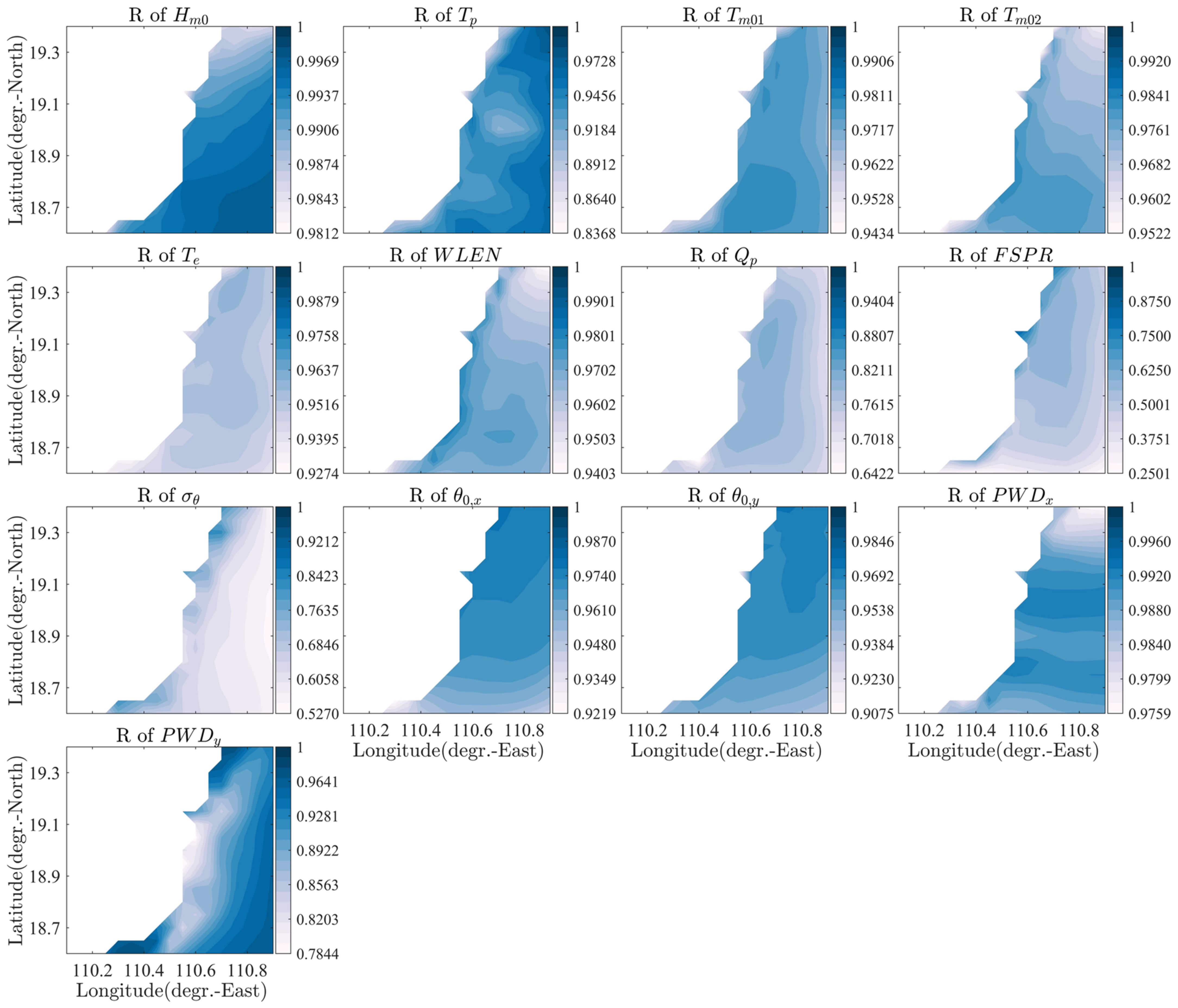
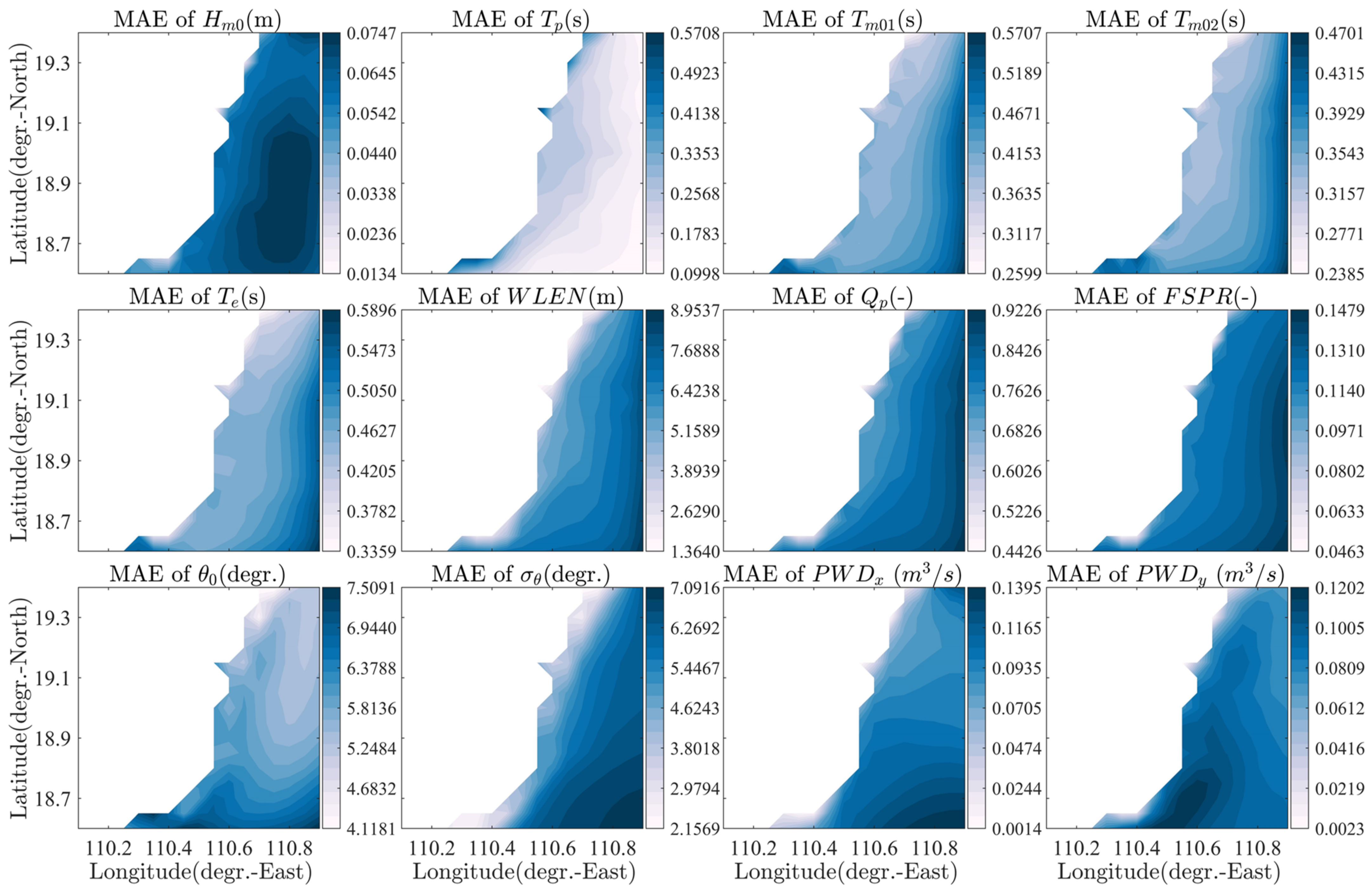
Figure 11 (12) demonstrates the similar spatial distribution of R (MAE) derived from the SWAN field output simulated with the original and the TMA–Mitsuyasu reconstructed boundaries. The colors, KPs, and demonstration region shown in
Figure 11 and
Figure 12 are the same as those shown in
Figure 5 and
Figure 6. In comparison with the results simulated using the boundaries reconstructed by the new approach, the quantitative errors illustrated in
Figure 11 and
Figure 12 reveal much poorer agreement with the original simulations. For example, the R values are reduced by approximately 10% and over 50% for the best and worst situations, respectively. The values of MAE also increase by approximately three to five times in comparison with those of the new approach, especially for the crucial features of wave height, period, and wave direction.
The key concept in the new approach is consideration of the spectral partitions as the fundamental units for preservation and reconstruction, which offers the following benefits: (i) each partition contains only one peak, making the spectral shape more convenient for processing, and (ii) partitions with low energy, as well as spurious partitions and noise, can be filtered, thereby making it easier to preserve and reconstruct the primary characteristics of the original spectra.
Technically, one of the key points is the adoption of the GUFSM in the LSM fittings, in addition to the separate fittings performed on the front and tail parts of the 1D frequency spectra. In the fitting step, determination of the number of RPs, i.e., and , still deserves further discussion. The strategies for selecting can be enumerated as follows:
: , , and are fixed, and the RPs to be fitted are , , and ;
: and are fixed, and the RPs to be fitted are , , , and ;
: the RPs to be fitted are , , , , , and .
Table 5 (6) presents the values of R (MAE) of the RPs derived from the original and the reconstructed partitions, where the latter are produced under the different strategies of
and
. The R (MAE) values under the typical setting of
and
, which are adopted in
Section 2 and
Section 3, are presented in the first row of
Table 5 (6), and the values obtained under the other strategies are expressed as differences relative to those values in the first row. The R and MAE values in
Table 5 and
Table 6 were derived from all the partitions identified at B2, and similar tables associated with the
n strategies at the points of B1 (
Tables S7 and S8), B3 (
Tables S9 and S10), and B4 (
Tables S11 and S12) can be found in the
Supplementary Material.
Figure 5 and
Figure 6 show that with more RPs involved in the LSM fittings, better agreement with the original KPs can be obtained, except for the KP
. Specifically, with
, further increment (reduction) in R (MAE) can be observed for the KPs associated with spectral bandwidth (i.e.,
and
,) than for the others; the opposite trends for the two KPs mentioned above can be found with
. However, with higher
involved in the fitting, the critical KPs of period and wavelength present improvement in terms of both R and MAE, but the goodness of fit of those KPs is reduced much more when
is lower. Nevertheless, the KP
remains unaffected by the
strategies. Considering the above results, we recommend adoption of the strategy of
and
.
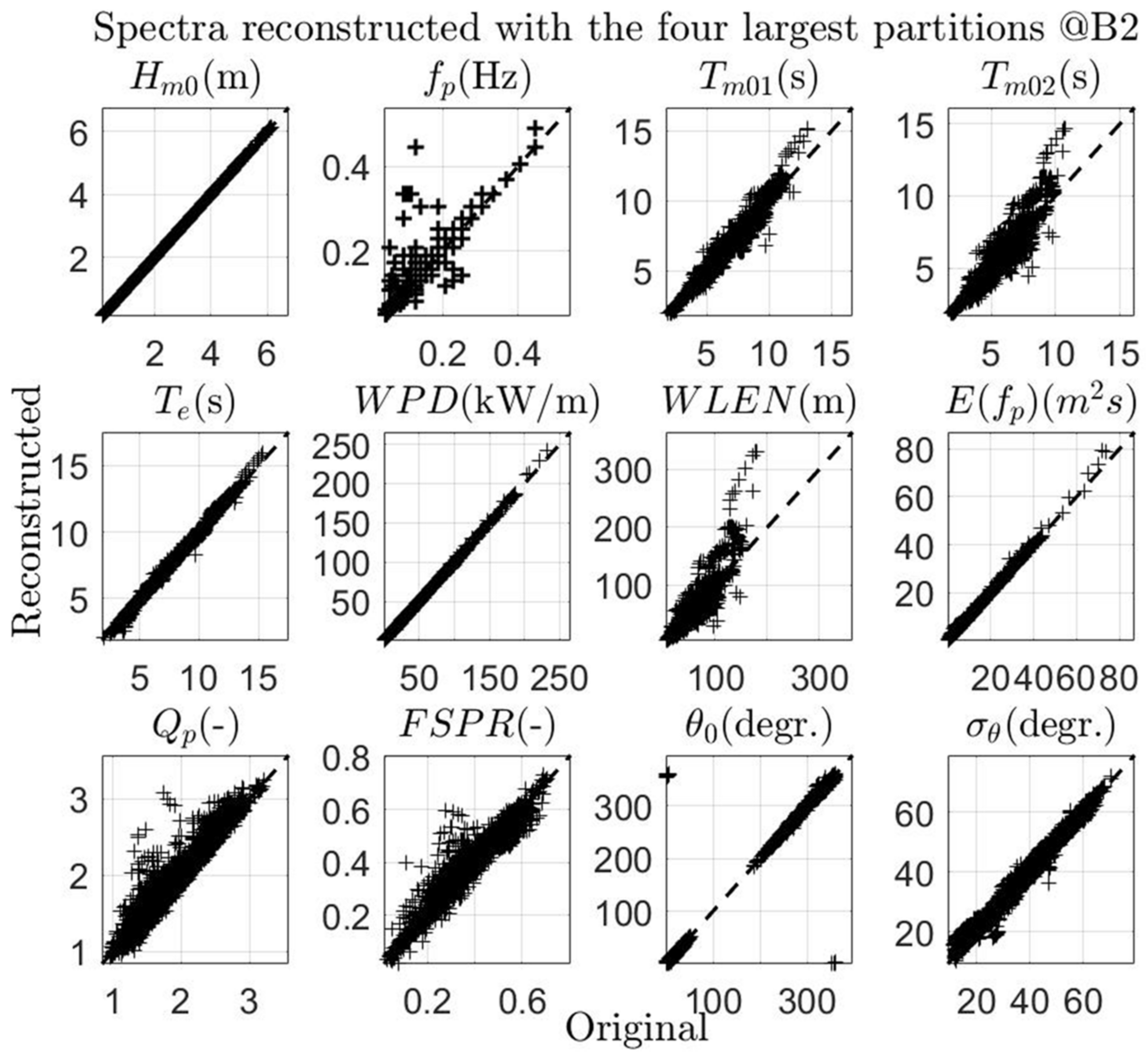
Another technical key point deserving further discussion is the maximum number of partitions that should be involved in Equation (18).
Table 7 and
Table 8 illustrate the R and MAE values of the KPs at check point B2 derived from the original and the reconstructed spectra, where the latter were reconstructed with the three and six largest partitions. All the R and MAE values are expressed as the differences to those obtained from the original spectra and the reconstructed ones using the four largest partitions, as described in
Section 3.
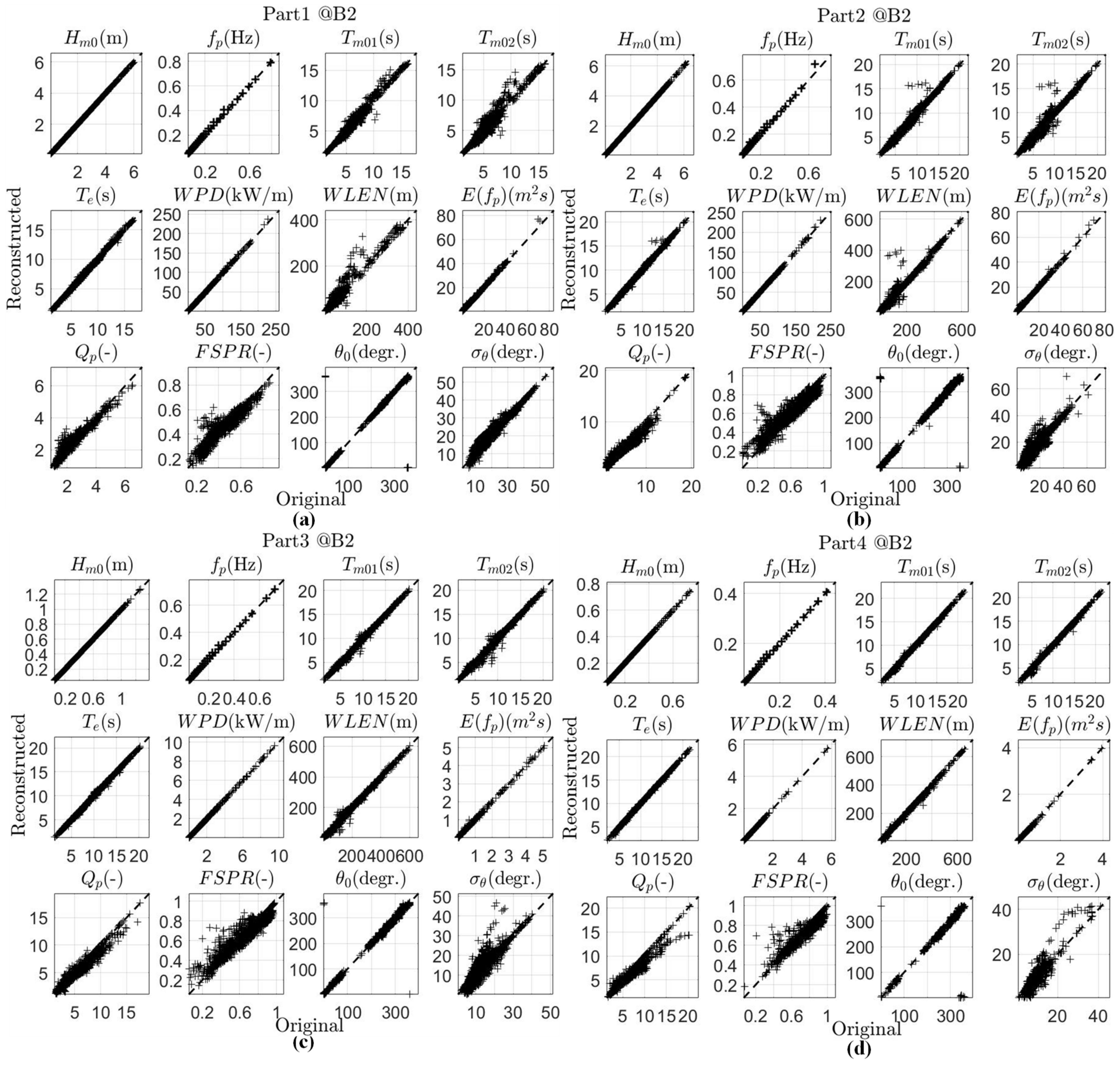
As can be seen from
Table 7 and
Table 8, the errors of the KPs derived from the spectra reconstructed with the three largest partitions increase slightly in comparison with those calculated based on the spectra rebuilt with the four largest partitions (as Part0 shown in
Table 3 and
Table 4), while the errors remain similar to those of the four largest partitions even though more partitions (the six largest) are considered. Similar results can also be observed at check points B1 (
Tables S13 and S14), B3 (
Tables S15 and S16), and B4 (
Tables S17 and S18), the associated tables can be found in the
Supplementary Material. Such findings confirm the fact that the number of coexisting wave systems (partitions) is fewer than four in most cases at point B2 (see the sampling number in
Table 3 and
Table 4). Therefore, the use of no more than four partitions to reconstruct a spectrum in this study is appropriate. In fact, consideration of just four significant wave systems (i.e., wind waves and the first, second, and third primary swell) can satisfy most sea states in real oceans; however, the use of fewer wave systems in the reconstruction might also be acceptable, e.g., wind waves with only one swell partition, which could further reduce the required storage space. Therefore, we recommend that the maximum number of partitions involved in the reconstruction should be based on the prevailing sea state of the nested domain.
The new approach can also be applied to observed 2D wave spectra. However, owing to the random property of ocean waves, observed spectra may comprise more noises or spurious peaks, making the identification of significant wave systems more difficult, as well as the computation of RPs more burdensome. Therefore, some noise-removal or smoothing procedures (e.g., [
57]) should be performed before the spectrum preservation and reconstruction; and consequently, certain insignificant details of the spectra might be ignored.
5. Conclusions
This paper described a new approach for the preservation and reconstruction of 2D wave spectra, and the results of application of the proposed approach to boundary conditions in nested wave modeling are also presented.
Traditionally, each wave spectrum saved on the nesting boundaries could require more than 1000 storage units, in accordance with the size of the spectral space. In the newly proposed preservation approach, a certain 2D spectrum is first separated into several partitions, each of which contains only one spectral peak. By performing LSM fitting with the newly proposed GUFSM and by introducing the Maximum Entropy Method, the 1D frequency spectrum and directional distribution of each identified partition can be represented by eleven and four RPs, respectively. Consequently, given that four primary wave systems (partitions), i.e., wind waves and the first, second, and third primary swell, might coexist in each spectrum, the number of storage units occupied in preservation of a spectrum could be reduced to a maximum of .
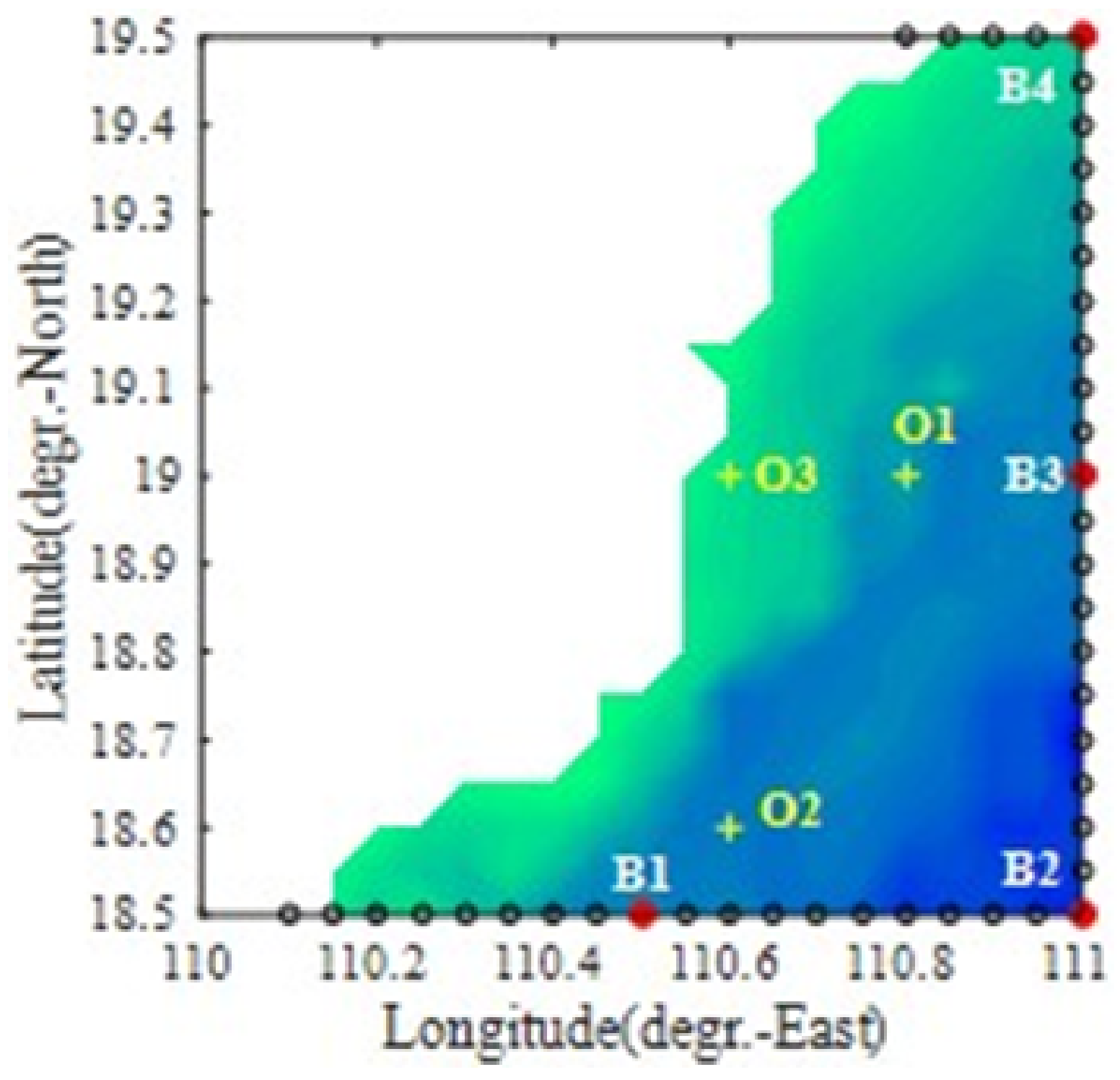
The corresponding proposed reconstruction approach can rebuild arbitrary 2D spectra with the preserved RPs, and the reconstructed spectra can be used as boundary conditions in nested wave modeling. To validate the agreement between the reconstructed and the original spectra, and to determine the feasibility of adopting the reconstructed spectra in nested modeling, simulations of the wave fields were conducted for the Wanning offshore area (Hainan, China). Comparisons of the original and the reconstructed spectra at the boundary points revealed that key features such as the wave height, wave period, propagation direction, and particularly wave energy flux of the original spectra could be retained intact in the reconstructed spectra. The wave fields simulated using the reconstructed boundaries conformed well with those forced by the original boundary conditions, and the spectral statistics derived from the two sets of simulated fields also presented a high level of agreement. The results of this study prove the feasibility of using the newly proposed approach in nested wave simulations.
The proposed approach allows spectral information, i.e., the RPs, of the entire simulated domain to be saved in long-term wave simulations with more acceptable storage consumption, and given that the RPs can be suitably preserved, simulations with finer spatial resolution can then be conducted free of the limitations of predefined boundaries. The above-mentioned properties of the new method could help support engineering projects concerning wave environments, research focused on wave climatology, and studies associated with wave energy assessment.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}