
A New Semi-Analytical MC Model for Oceanic LIDAR Inelastic Signals

Abstract
:1. Introduction
2. Materials and Methods
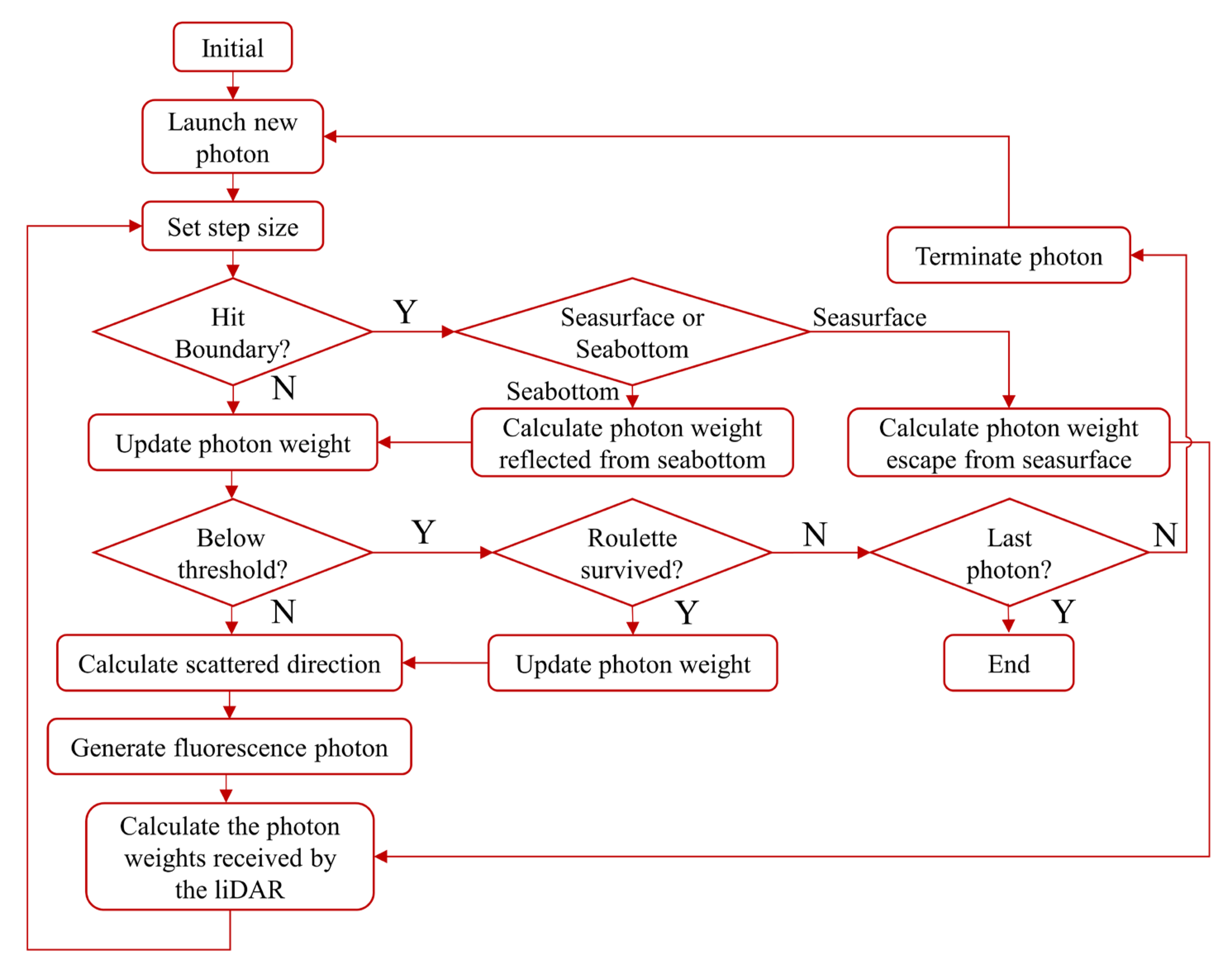
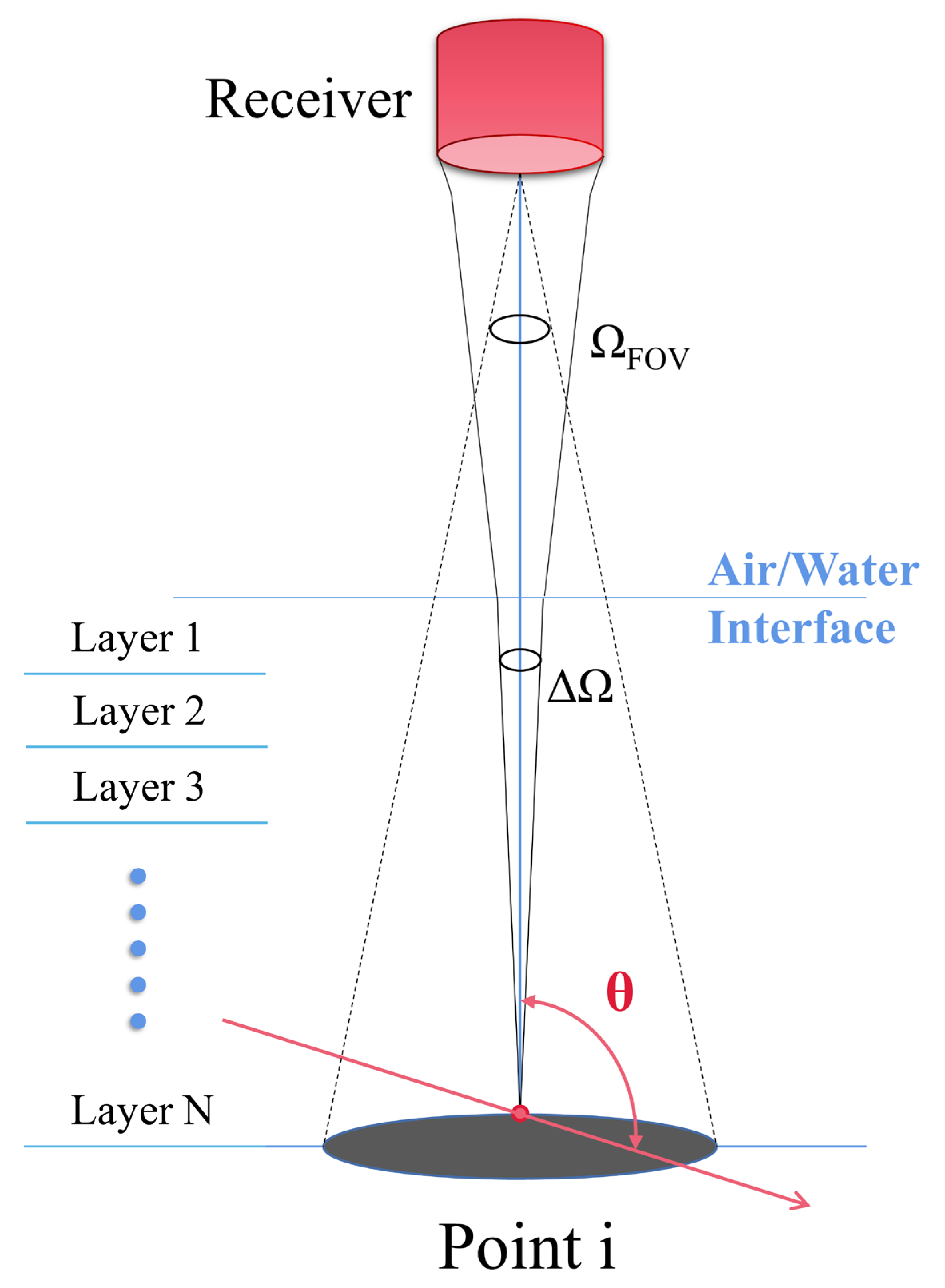
2.1. Semi-Analytic MC Model
2.2. HSRL Model
2.3. Fluorescence Model
2.4. Raman Scattering Model
2.5. Hydrosol Model
2.6. LUT Method for Arbitrary SPF
3. Results
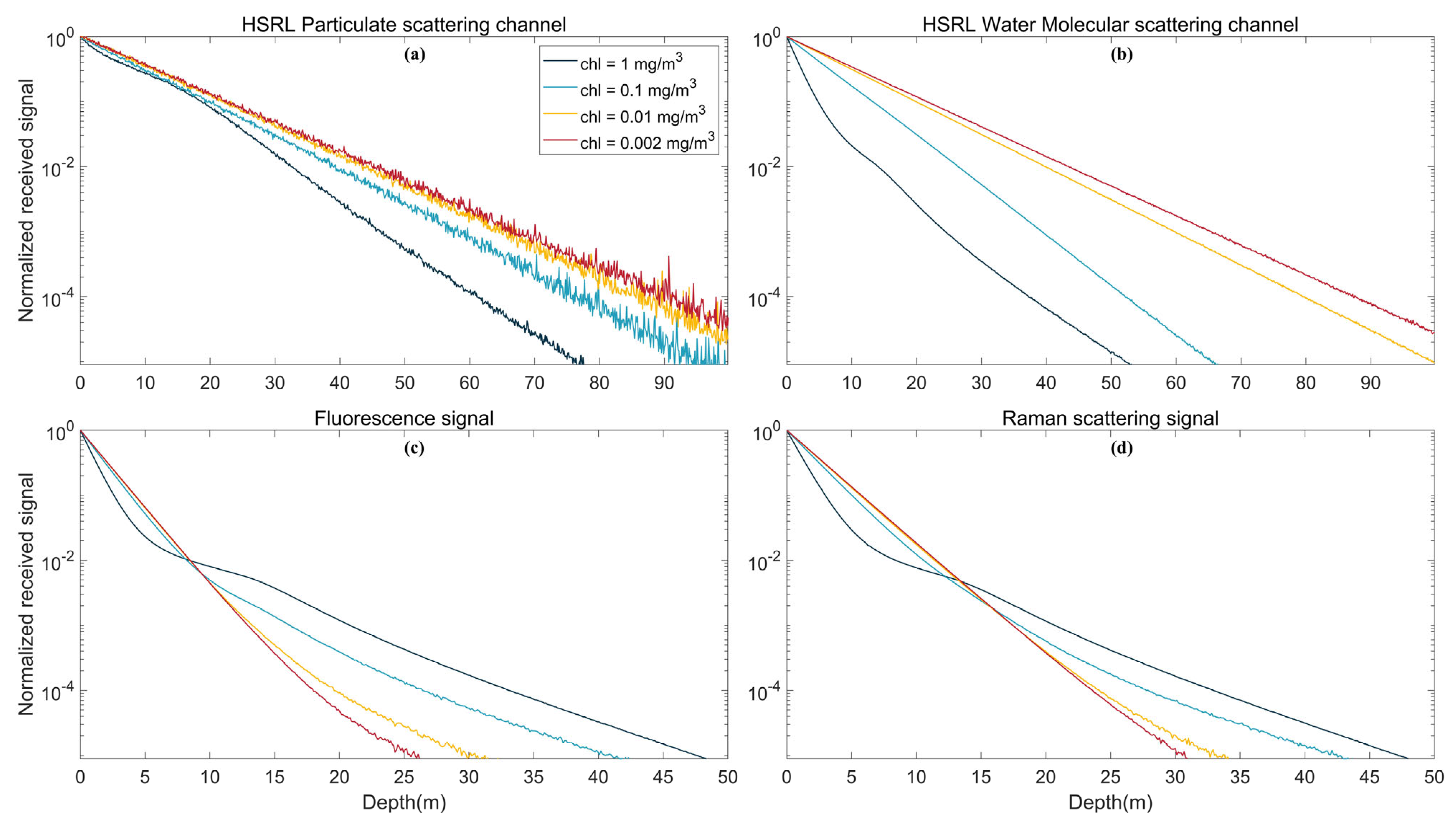
3.1. Effect of Different Chlorophyll Concentrations
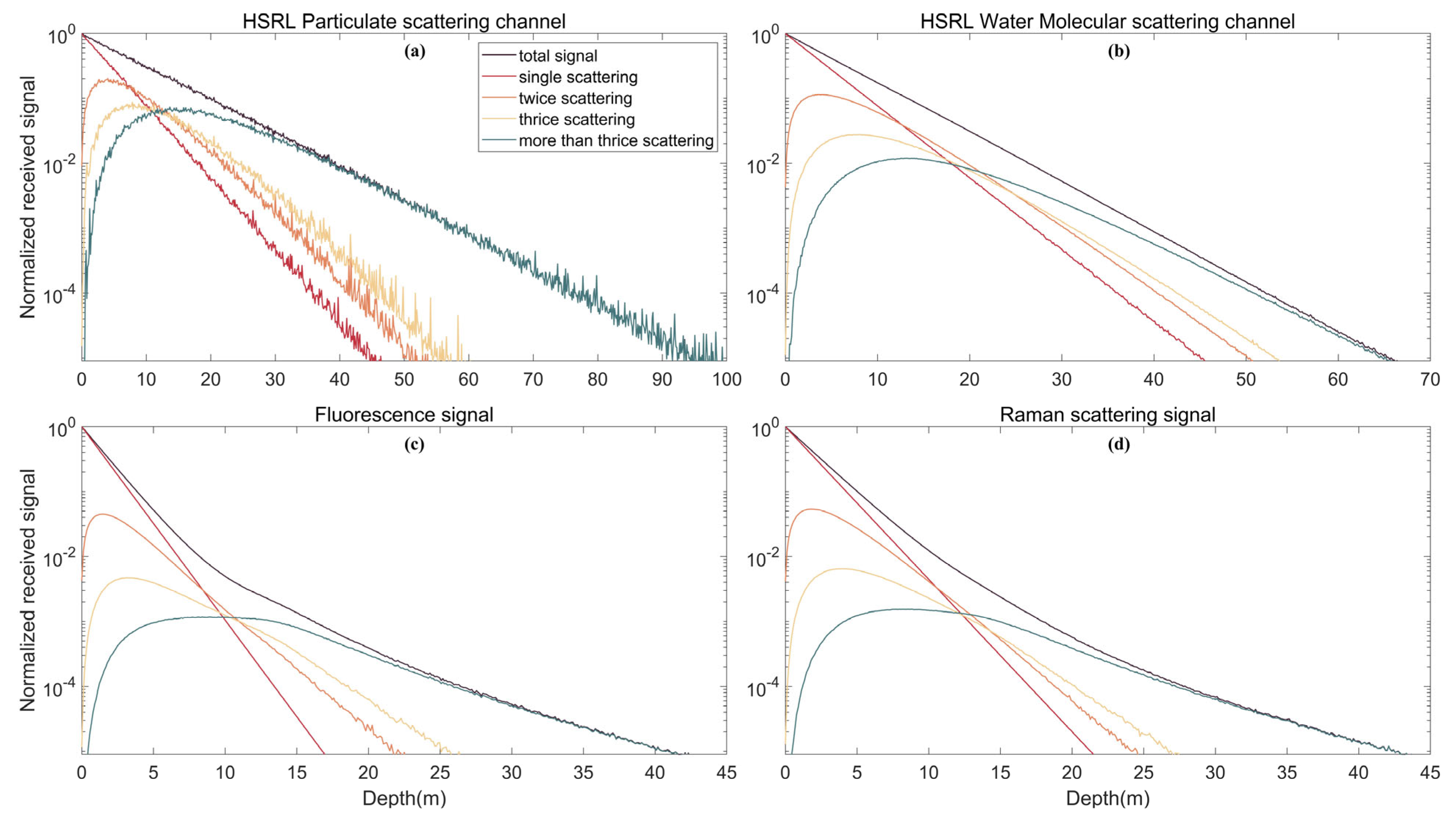
3.2. Effect of Multiple Scattering
4. Discussion
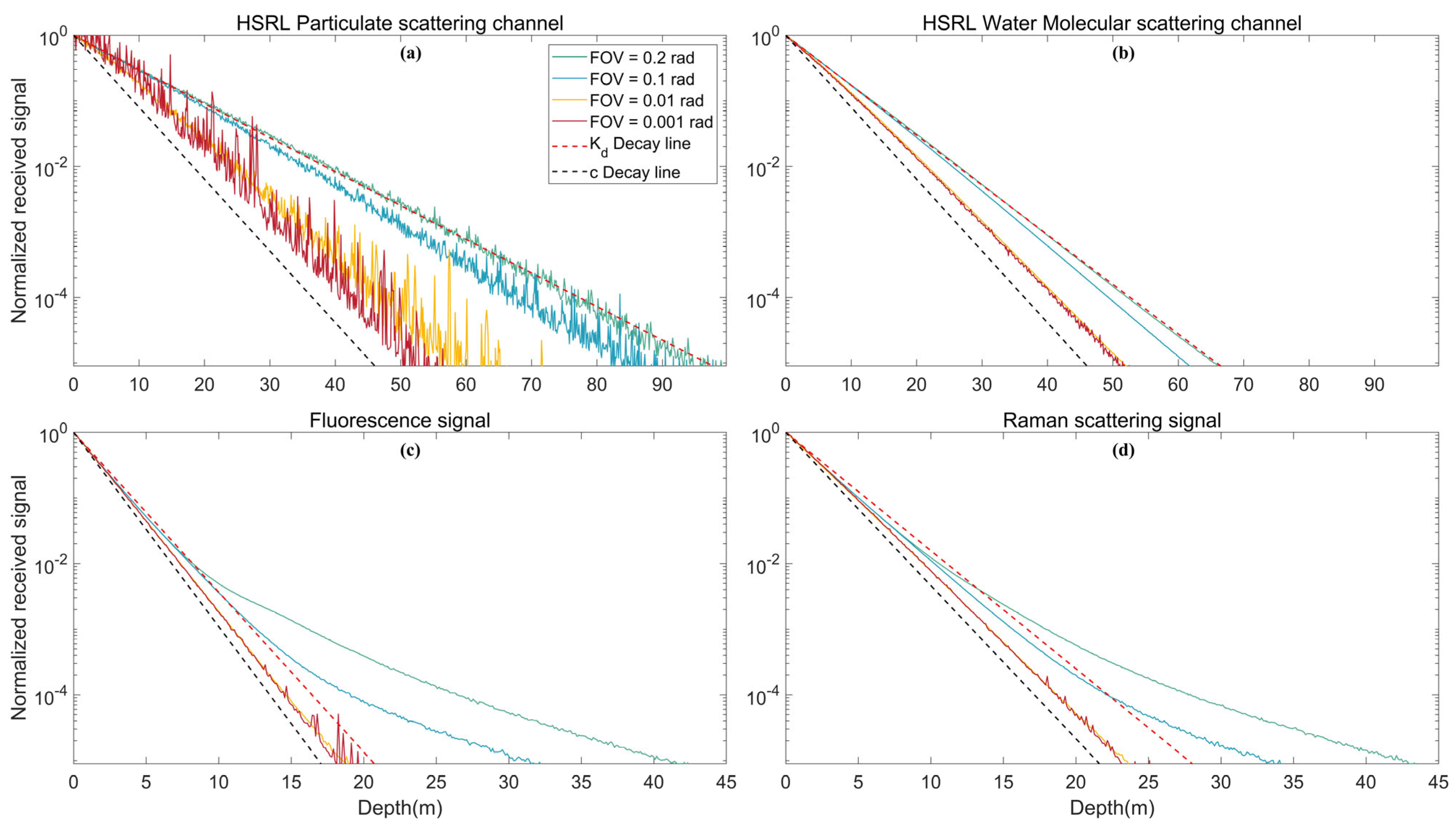
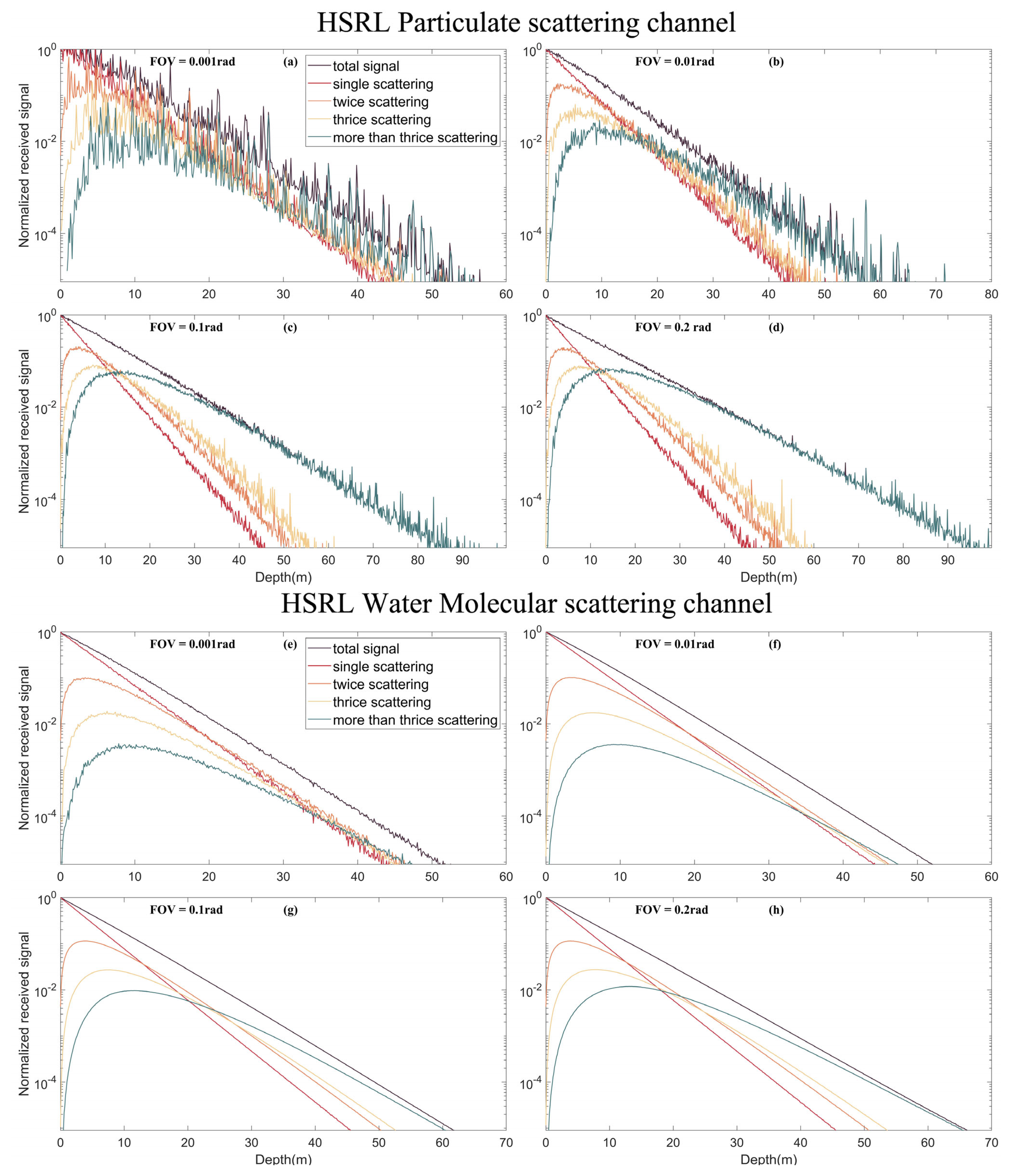
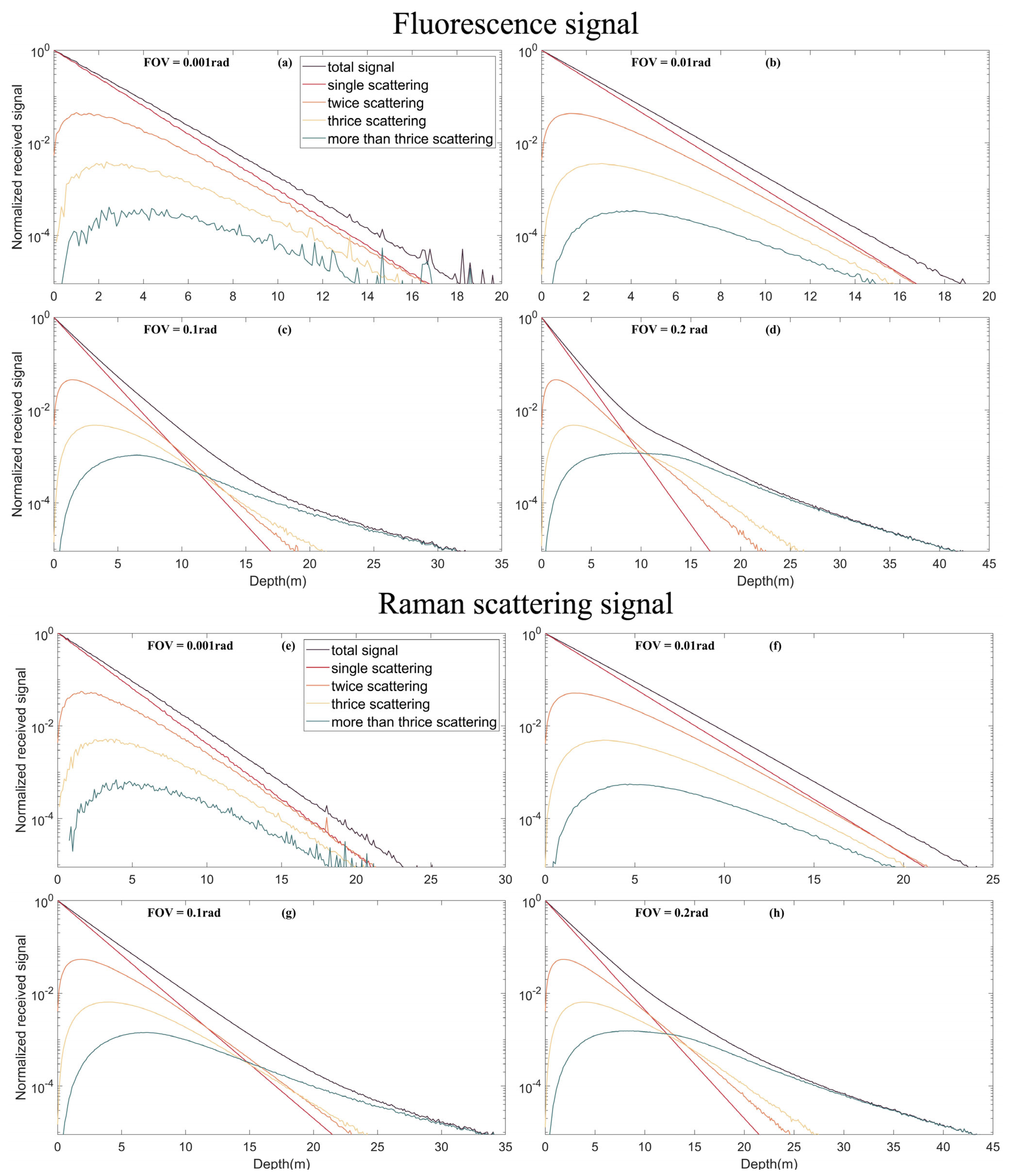
4.1. Multiple Scattering Contributions under Different FOVs
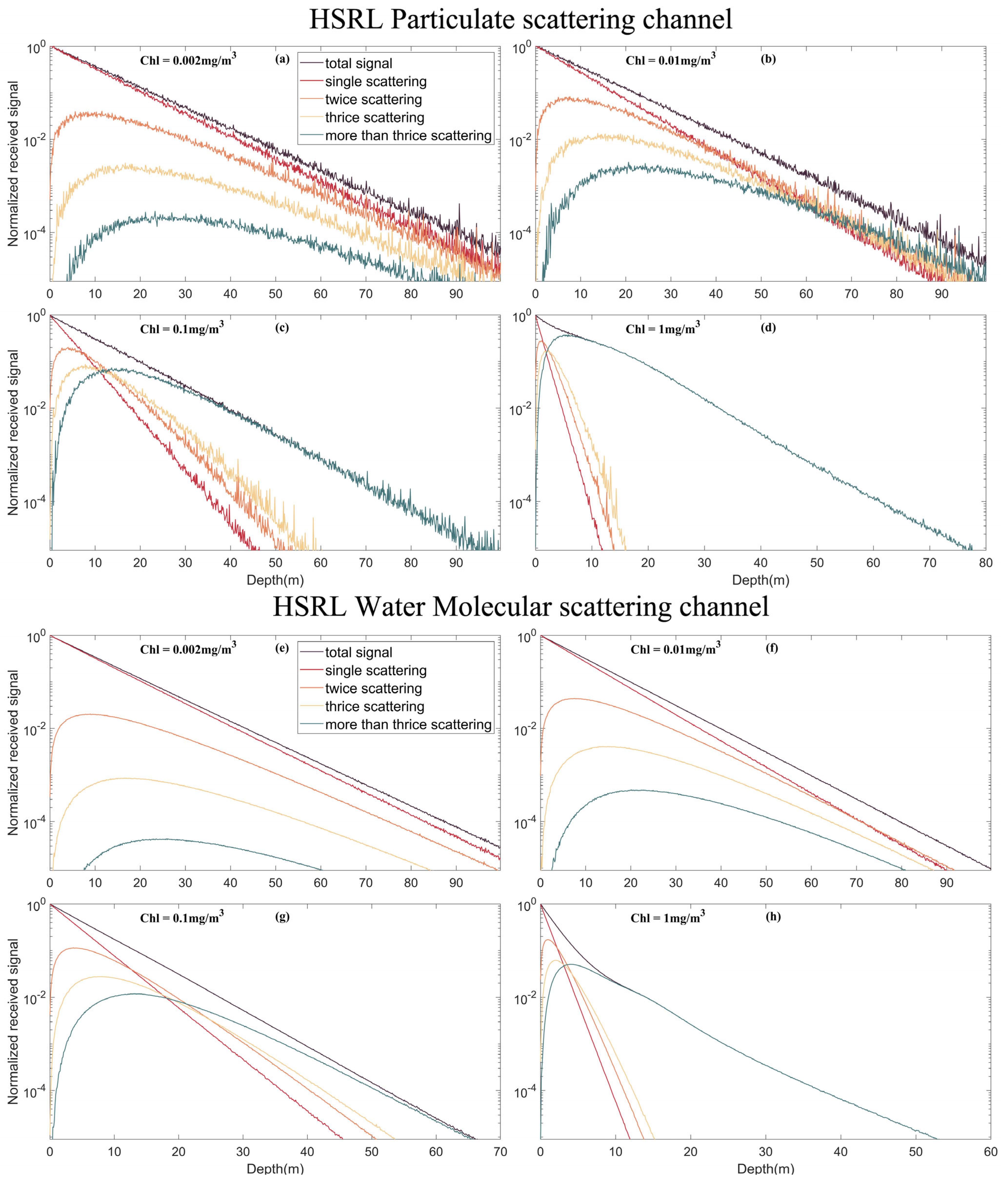
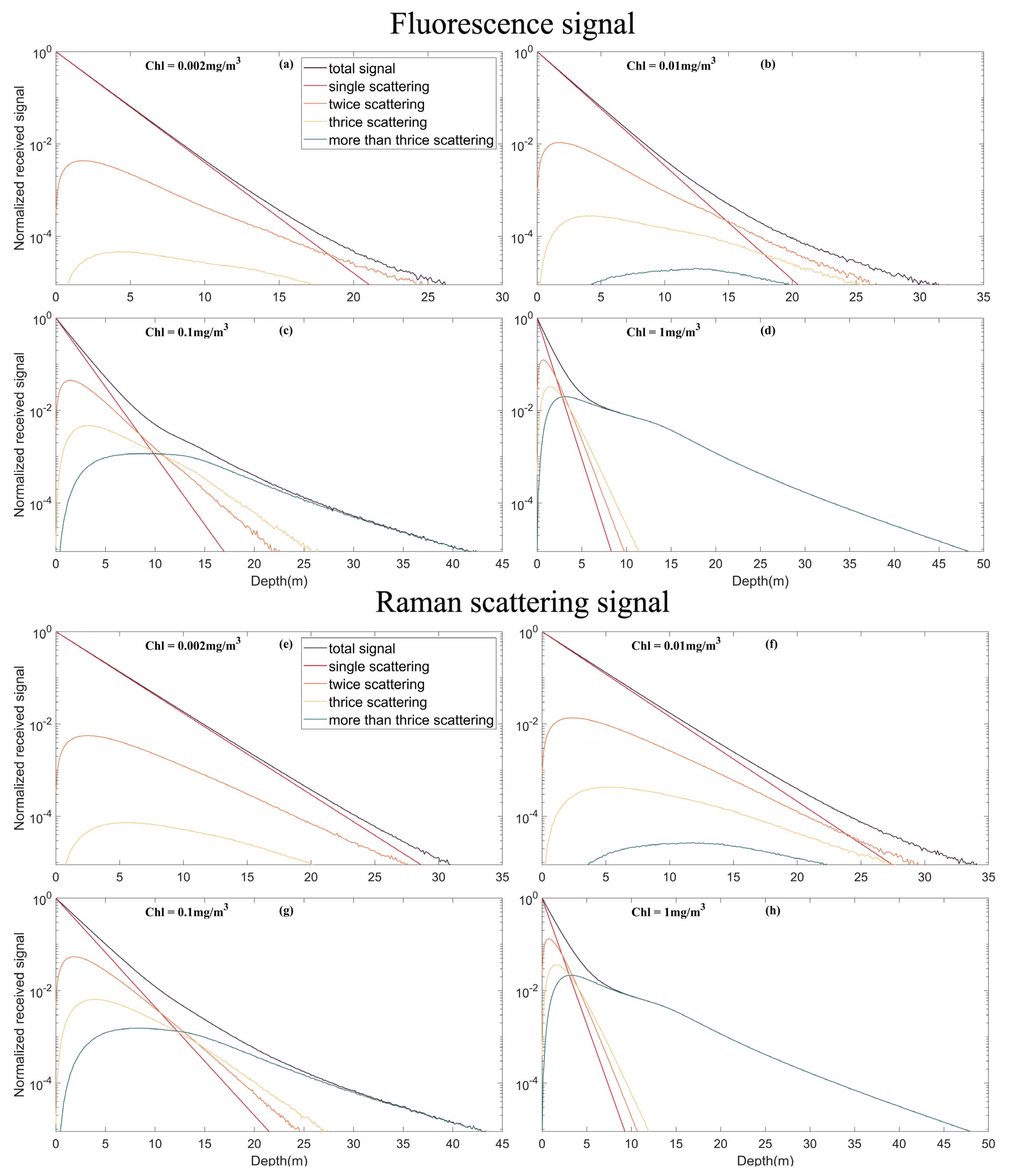
4.2. Multiple Scattering Contributions under Different Chlorophyll Concentrations
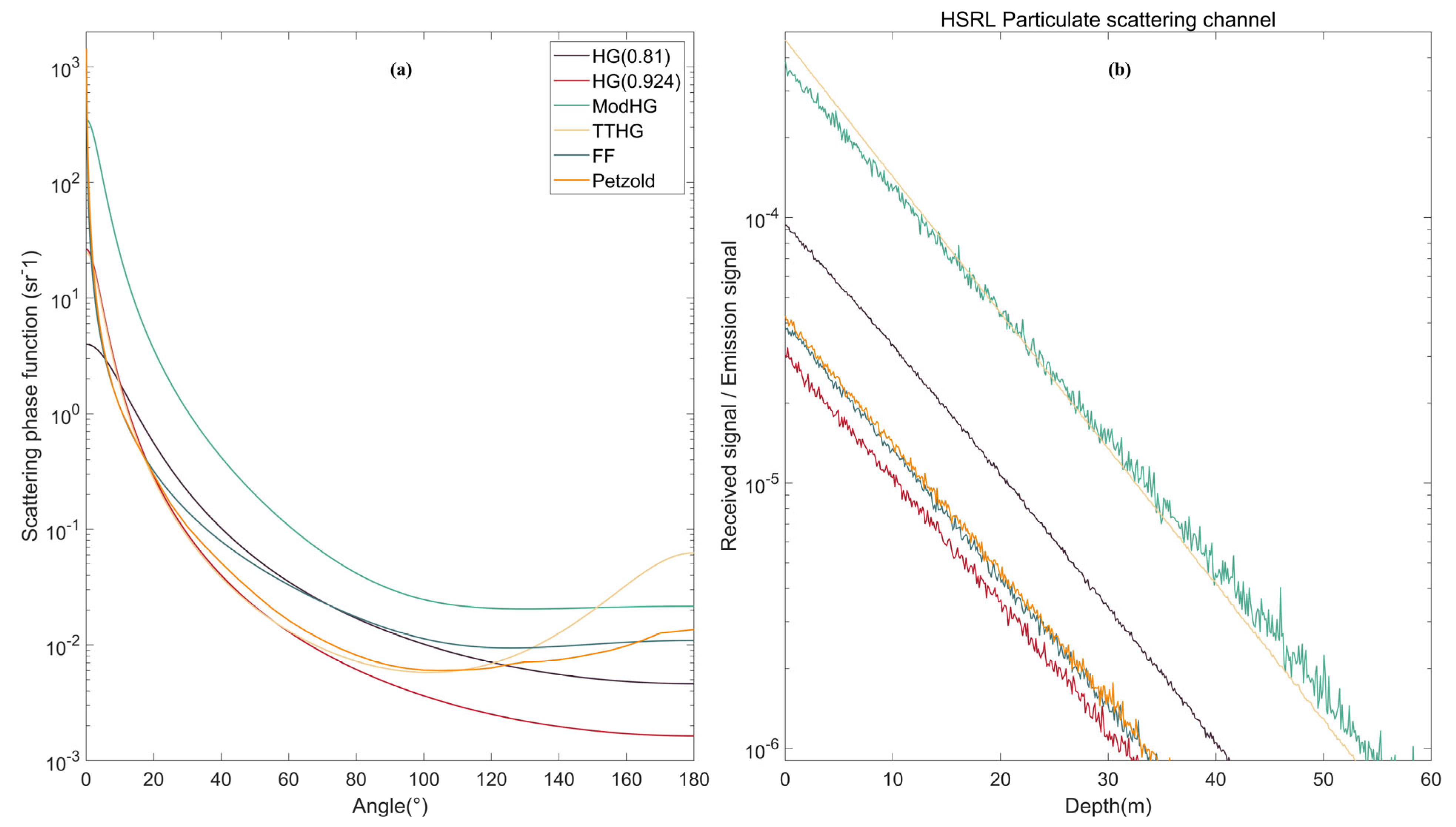
4.3. Effect of SPF
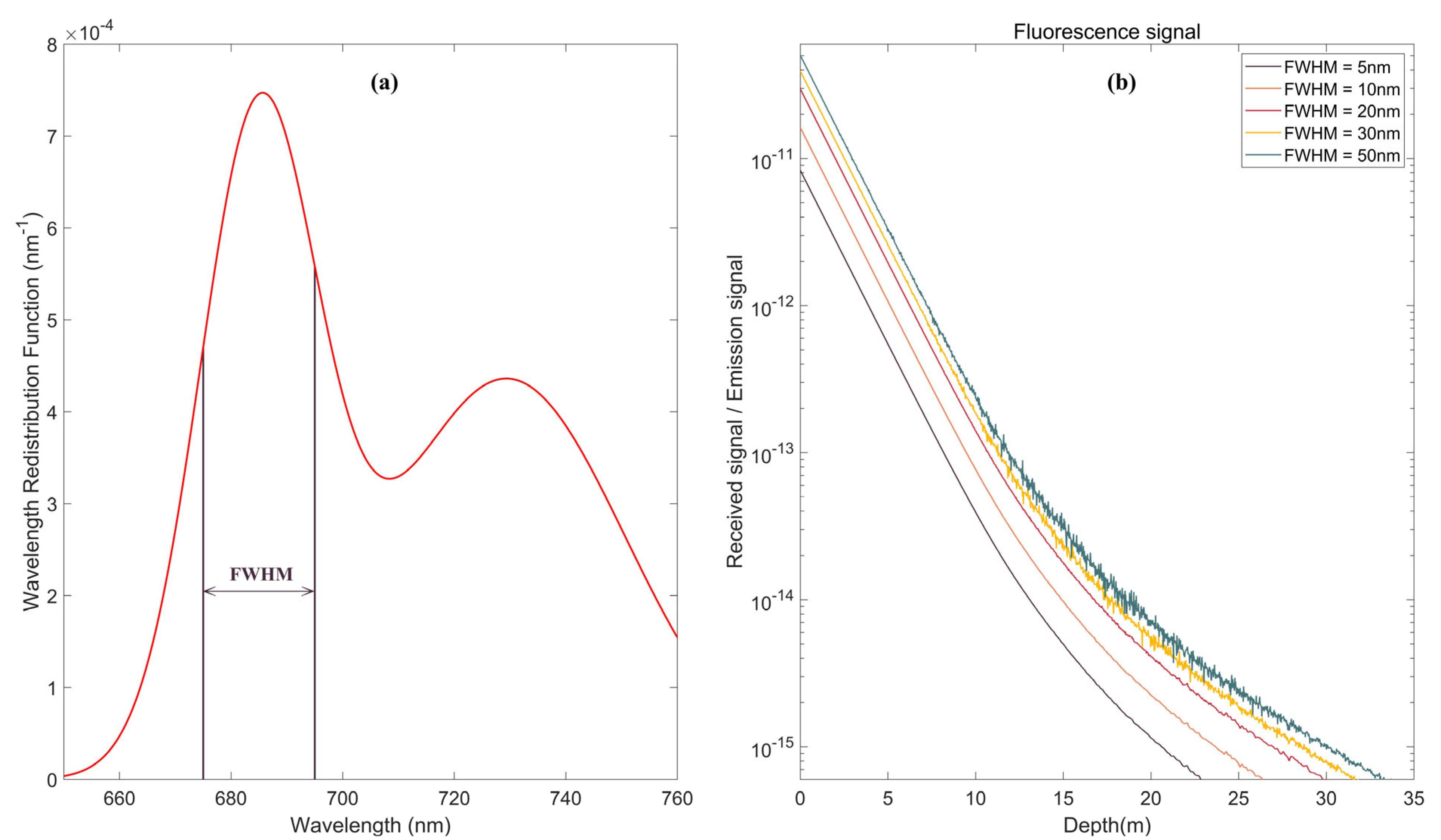
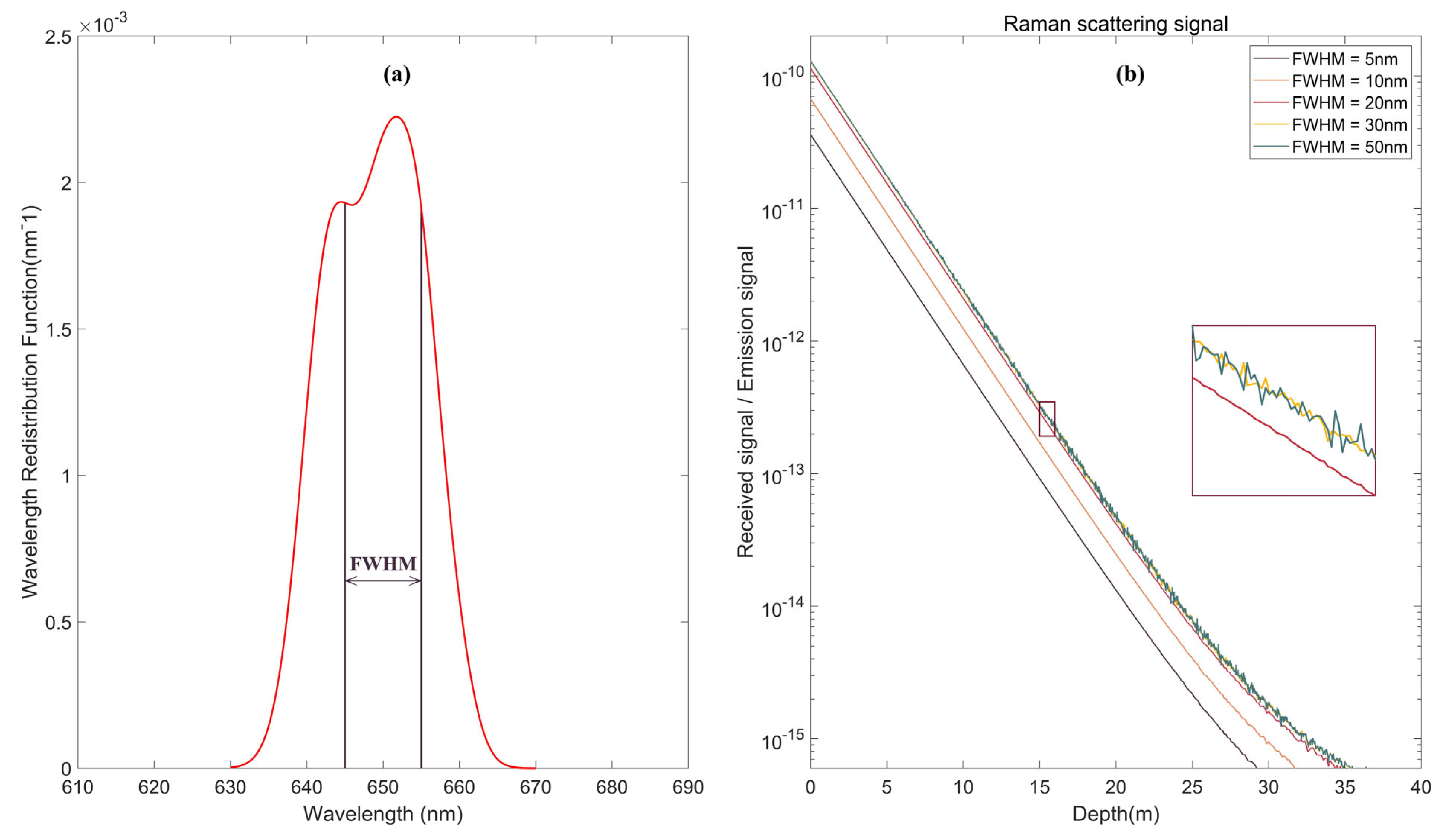
4.4. Effect of Receiver FWHM
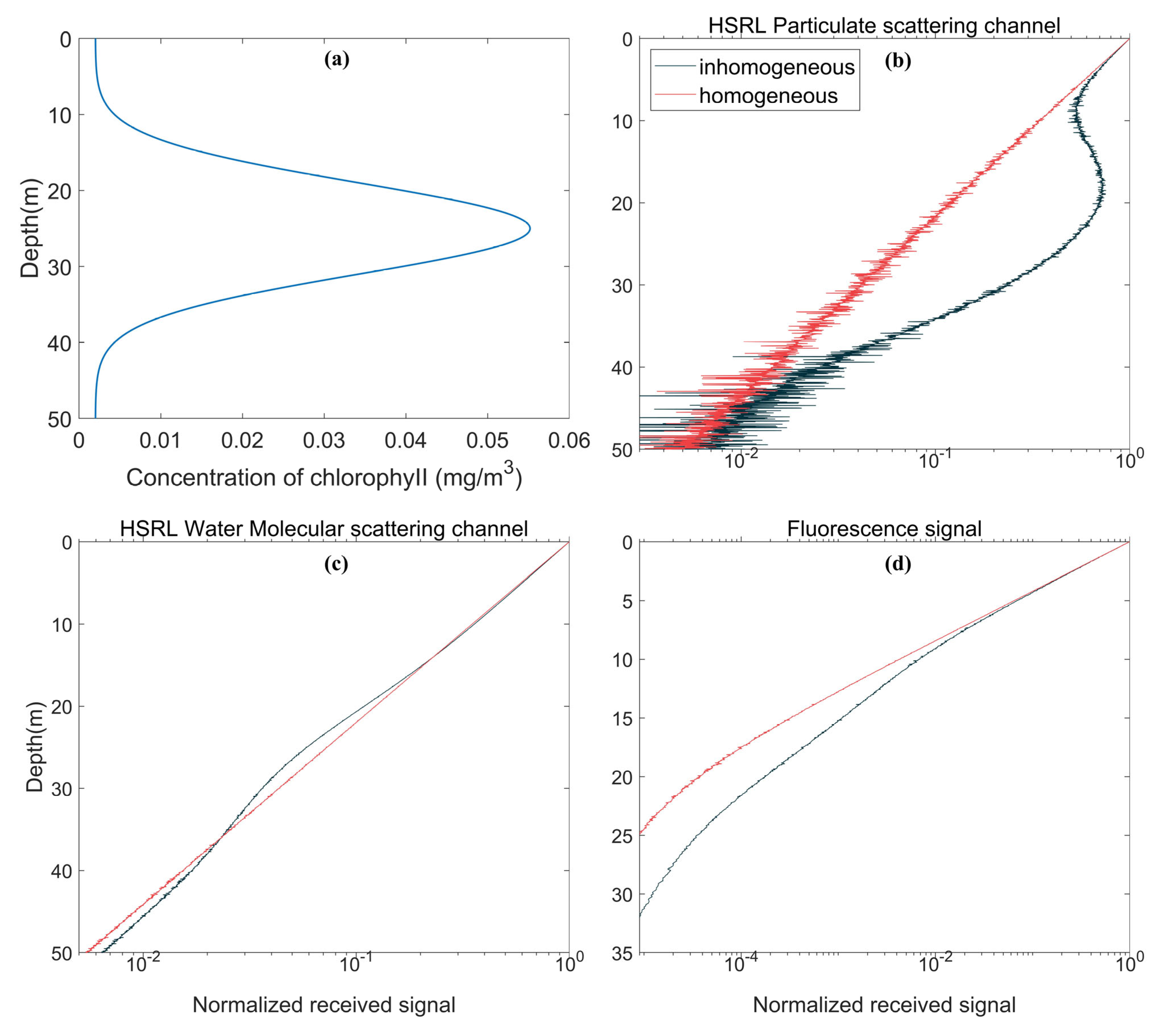
4.5. Effect of Inhomogeneous Water
5. Conclusions
- (1)
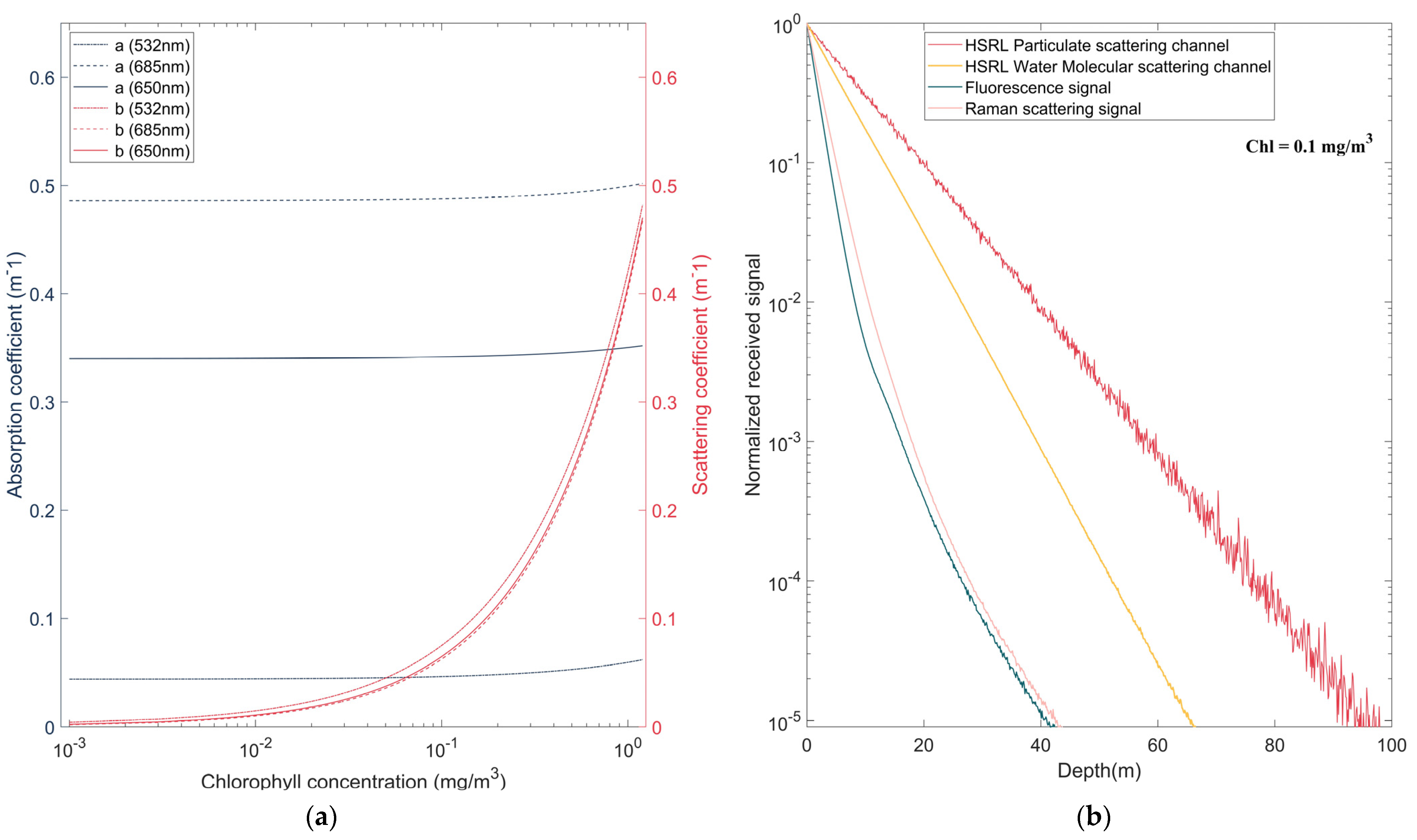
- The higher the concentration of chlorophyll, the faster the speed of the HSRL echo signal decreases with depth. However, for fluorescence and Raman scattering signals, a high chlorophyll concentration can allow the receiver to detect deeper echo signals within its dynamic range. Under the same chlorophyll concentration, the fluorescence and Raman scattering simulated signals decay faster than the HSRL simulated signals.
- (2)
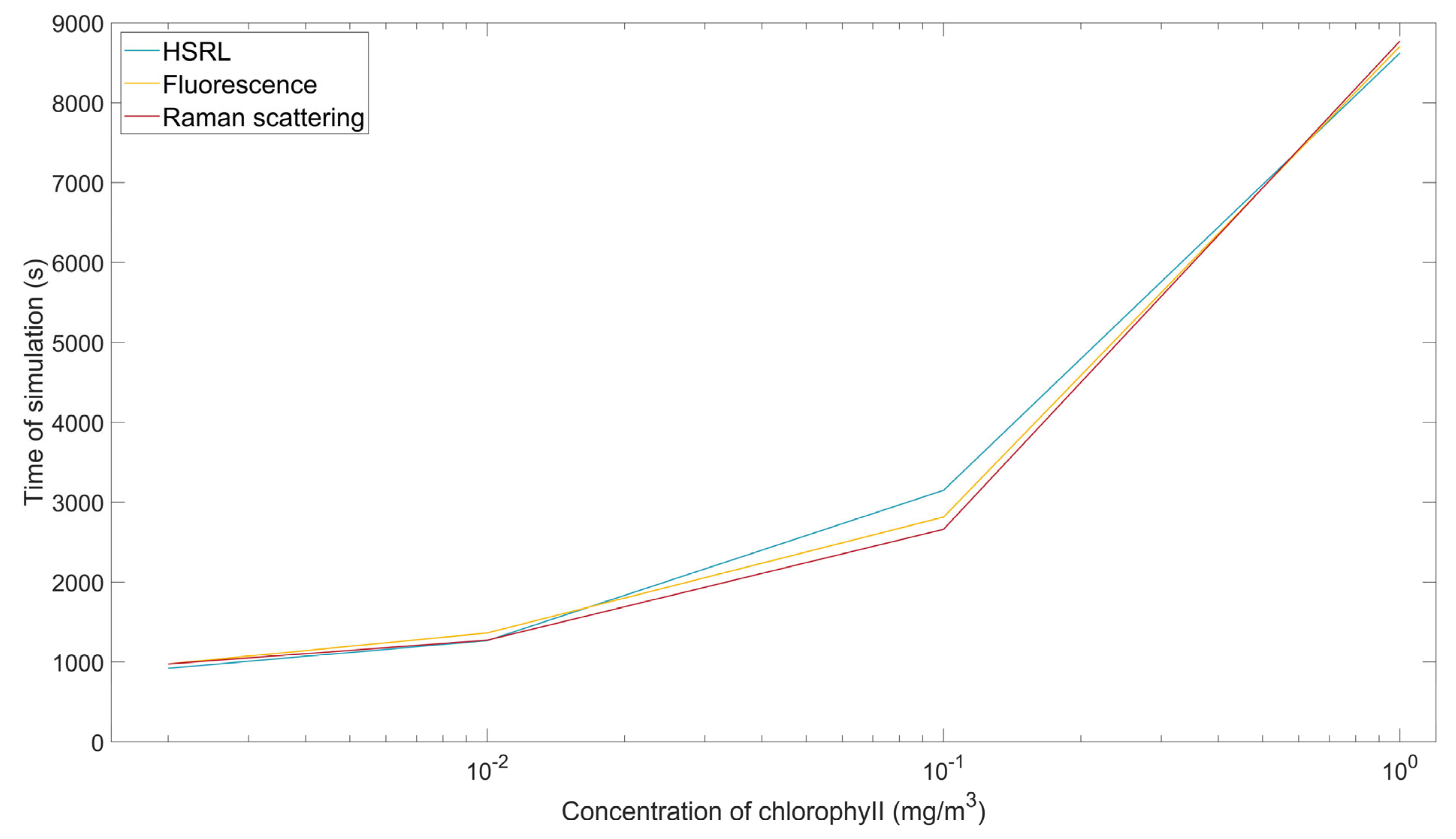
- The simulation time is proportional to the chlorophyll concentration and indicates that turbid water produces more multiple scattering events and increases the multiple propagation paths. With increasing depth, the frequency of multiple scattering increases, and the intensity of the multiple scattering signal in each signal increases. For small FOVs, multiple scattering is so small that we can only consider single scattering; lidar attenuation is near that of water. For large FOVs, multiple scattering plays a major role in the total signal when the water depth increases to a certain extent.
- (3)
- Different SPFs were used to assess their impact on HSRL particulate scattering signal modeling. The widely used HG SPF is not good for small or large scattering angles. The results of FF SPF and measured Petzold were relatively consistent. Therefore, in lidar simulations, an appropriate SPF should be selected according to the real oceanic environment.
- (4)
- The effects of different FWHM receivers on fluorescence and Raman signals are simulated. The larger the FWHM, the higher the received signal intensity and the greater the background noise. Simulations show that a suitable FWHM of fluorescent lidar is between 20 and 30 nm, which is 20 nm for Raman lidar.
- (5)
- For inhomogeneous seawater, the HSRL particulate scattering signal shows a bulge corresponding to the depth of the chlorophyll profile bulge. We can use this measurement feature to detect SCML. Inhomogeneous seawater also causes a change in the HSRL water molecular scattering signal and fluorescence signal. Thus, we should consider the influence of inhomogeneous water in oceanic lidar simulations.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- McClain, C.R. A decade of satellite ocean color observations. Annu. Rev. Mar. Sci. 2009, 1, 19–42. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hostetler, C.A.; Behrenfeld, M.J.; Hu, Y.; Hair, J.W.; Schulien, J.A. Spaceborne lidar in the study of marine systems. Annu. Rev. Mar. Sci. 2018, 10, 121–147. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, H.; Chen, P.; Mao, Z.; Pan, D. Iterative retrieval method for ocean attenuation profiles measured by airborne lidar. Appl. Opt. 2020, 59, C42–C51. [Google Scholar] [CrossRef] [PubMed]
- Chen, P.; Jamet, C.; Mao, Z.; Pan, D. OLE: A Novel Oceanic Lidar Emulator. IEEE Trans. Geosci. Remote Sens. 2020, 59, 9730–9744. [Google Scholar] [CrossRef]
- Lu, X.; Hu, Y.; Trepte, C.; Zeng, S.; Churnside, J.H. Ocean subsurface studies with the CALIPSO spaceborne lidar. J. Geophys. Res. Ocean. 2014, 119, 4305–4317. [Google Scholar] [CrossRef]
- Zhou, G.; Li, C.; Zhang, D.; Liu, D.; Zhou, X.; Zhan, J. Overview of underwater transmission characteristics of oceanic LiDAR. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 8144–8159. [Google Scholar] [CrossRef]
- Lu, X.; Hu, Y.; Yang, Y.; Bontempi, P.; Omar, A.; Baize, R. Antarctic spring ice-edge blooms observed from space by ICESat-2. Remote Sens. Environ. 2020, 245, 111827. [Google Scholar] [CrossRef]
- Dionisi, D.; Brando, V.E.; Volpe, G.; Colella, S.; Santoleri, R. Seasonal distributions of ocean particulate optical properties from spaceborne lidar measurements in Mediterranean and Black sea. Remote Sens. Environ. 2020, 247, 111889. [Google Scholar] [CrossRef]
- Bissonnette, L.R. Lidar and multiple scattering. In Lidar; Springer: Cham, Switzerland, 2005; pp. 43–103. [Google Scholar]
- Poole, L.R.; Venable, D.D.; Campbell, J.W. Semianalytic Monte Carlo radiative transfer model for oceanographic lidar systems. Appl. Opt. 1981, 20, 3653–3656. [Google Scholar] [CrossRef]
- Jacques, S.L. Monte Carlo modeling of light transport in tissue (steady state and time of flight). In Optical-Thermal Response of Laser-Irradiated Tissue; Springer: Berlin/Heidelberg, Germany, 2010; pp. 109–144. [Google Scholar]
- Gordon, H.R. Interpretation of airborne oceanic lidar: Effects of multiple scattering. Appl. Opt. 1982, 21, 2996–3001. [Google Scholar] [CrossRef]
- Xiu, D. Numerical methods for stochastic computations. In Numerical Methods for Stochastic Computations; Princeton University Press: Princeton, NJ, USA, 2010. [Google Scholar]
- Khankhoje, U.K.; Padhy, S. Stochastic solutions to rough surface scattering using the finite element method. IEEE Trans. Antennas Propag. 2017, 65, 4170–4180. [Google Scholar] [CrossRef]
- Eloranta, E.E. High spectral resolution lidar. In Lidar; Springer: Cham, Switzerland, 2005; pp. 143–163. [Google Scholar]
- Zhou, Y.; Chen, Y.; Zhao, H.; Jamet, C.; Dionisi, D.; Chami, M.; Di Girolamo, P.; Churnside, J.H.; Malinka, A.; Zhao, H. Shipborne oceanic high-spectral-resolution lidar for accurate estimation of seawater depth-resolved optical properties. Light Sci. Appl. 2022, 11, 261. [Google Scholar] [CrossRef]
- Ren, X.-Y.; Cui, Z.-H.; Tian, Z.-S.; Yang, J.-G.; Liu, L.-B.; Fu, S.-Y. Key technologies and development of Brillouin LIDAR in ocean telemetry. Jiguang Jishu Laser Technol. 2011, 35, 808–812. [Google Scholar]
- Asahara, Y.; Murakami, M.; Ohishi, Y.; Hirao, N.; Hirose, K. Sound velocity measurement in liquid water up to 25 GPa and 900 K: Implications for densities of water at lower mantle conditions. Earth Planet. Sci. Lett. 2010, 289, 479–485. [Google Scholar] [CrossRef]
- Yuan, D.; Xu, J.; Liu, Z.; Hao, S.; Shi, J.; Luo, N.; Li, S.; Liu, J.; Wan, S.; He, X. High resolution stimulated Brillouin scattering lidar using Galilean focusing system for detecting submerged objects. Opt. Commun. 2018, 427, 27–32. [Google Scholar] [CrossRef]
- Matteoli, S.; Diani, M.; Corsini, G. A Fluorescence Lidar Simulator for the Design of Advanced Water Quality Assessment Methodologies. In Proceedings of the IGARSS 2020–2020 IEEE International Geoscience and Remote Sensing Symposium, Virtual, 26 September–2 October 2020; pp. 3743–3746. [Google Scholar]
- Malinka, A.V.; Zege, E.P. Retrieving seawater-backscattering profiles from coupling Raman and elastic lidar data. Appl. Opt. 2004, 43, 3925–3930. [Google Scholar] [CrossRef]
- Leonard, D.A.; Sweeney, H.E. Remote sensing of ocean physical properties: A comparison of Raman and Brillouin techniques. In Proceedings of the 1988 Technical Symposium on Optics, Electro-Optics, and Sensors, Orlando, FL, USA, 4–8 April 1988; pp. 407–414. [Google Scholar]
- Malinka, A.V.; Zege, E.P. Analytical modeling of Raman lidar return, including multiple scattering. Appl. Opt. 2003, 42, 1075–1081. [Google Scholar] [CrossRef]
- Chen, P.; Pan, D.; Mao, Z.; Liu, H. Semi-analytic Monte Carlo model for oceanographic lidar systems: Lookup table method used for randomly choosing scattering angles. Appl. Sci. 2018, 9, 48. [Google Scholar] [CrossRef] [Green Version]
- Hair, J.W.; Hostetler, C.A.; Cook, A.L.; Harper, D.B.; Ferrare, R.A.; Mack, T.L.; Welch, W.; Izquierdo, L.R.; Hovis, F.E. Airborne high spectral resolution lidar for profiling aerosol optical properties. Appl. Opt. 2008, 47, 6734–6752. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Y.; Liu, D.; Xu, P.; Liu, C.; Bai, J.; Yang, L.; Cheng, Z.; Tang, P.; Zhang, Y.; Su, L. Retrieving the seawater volume scattering function at the 180° scattering angle with a high-spectral-resolution lidar. Opt. Express 2017, 25, 11813–11826. [Google Scholar] [CrossRef]
- Hua, D.; Uchida, M.; Kobayashi, T. Ultraviolet Rayleigh–Mie lidar with Mie-scattering correction by Fabry–Perot etalons for temperature profiling of the troposphere. Appl. Opt. 2005, 44, 1305–1314. [Google Scholar] [CrossRef] [PubMed]
- Lakowicz, J.R. Introduction to fluorescence. In Principles of Fluorescence Spectroscopy; Springer: New York, NY, USA, 1999; pp. 1–23. [Google Scholar]
- Valeur, B.; Berberan-Santos, M.N. Molecular Fluorescence: Principles and Applications; John Wiley & Sons: New York, NY, USA, 2012. [Google Scholar]
- Mobley, C.; Boss, E.; Roesler, C. Ocean Optics Web Book. Available online: http://www.oceanopticsbook.info (accessed on 10 November 2022).
- Gordon, H.R. Diffuse reflectance of the ocean: The theory of its augmentation by chlorophyll a fluorescence at 685 nm. Appl. Opt. 1979, 18, 1161–1166. [Google Scholar] [CrossRef] [PubMed]
- Falkowski, P.G.; Lin, H.; Gorbunov, M.Y. What limits photosynthetic energy conversion efficiency in nature? Lessons from the oceans. Philos. Trans. R. Soc. B: Biol. Sci. 2017, 372, 20160376. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Santabarbara, S.; Remelli, W.; Petrova, A.A.; Casazza, A.P. Influence of the Wavelength of Excitation and Fluorescence Emission Detection on the Estimation of Fluorescence-Based Physiological Parameters in Different Classes of Photosynthetic Organisms. In Fluorescence Methods for Investigation of Living Cells and Microorganisms; IntechOpen: Rijeka, Croatia, 2020. [Google Scholar]
- Hellwarth, R.W. Theory of stimulated Raman scattering. Phys. Rev. 1963, 130, 1850. [Google Scholar] [CrossRef]
- Long, D.A.; Long, D. The Raman Effect: A Unified Treatment of the Theory of Raman Scattering by Molecules; John Wiley & Sons: Chichester, UK, 2002; Volume 8. [Google Scholar]
- Desiderio, R.A. Application of the Raman scattering coefficient of water to calculations in marine optics. Appl. Opt. 2000, 39, 1893–1894. [Google Scholar] [CrossRef]
- Bartlett, J.S.; Voss, K.J.; Sathyendranath, S.; Vodacek, A. Raman scattering by pure water and seawater. Appl. Opt. 1998, 37, 3324–3332. [Google Scholar] [CrossRef]
- Walrafen, G. Raman spectral studies of the effects of temperature on water structure. J. Chem. Phys. 1967, 47, 114–126. [Google Scholar] [CrossRef]
- Mobley, C.D.; Mobley, C.D. Light and Water: Radiative Transfer in Natural Waters; Academic Press: Cambridge, MA, USA, 1994. [Google Scholar]
- Prieur, L.; Sathyendranath, S. An optical classification of coastal and oceanic waters based on the specific spectral absorption curves of phytoplankton pigments, dissolved organic matter, and other particulate materials. Limnol. Oceanogr. 1981, 26, 671–689. [Google Scholar] [CrossRef]
- Pope, R.M.; Fry, E.S. Absorption spectrum (380–700 nm) of pure water. II. Integrating cavity measurements. Appl. Opt. 1997, 36, 8710–8723. [Google Scholar] [CrossRef]
- Bricaud, A.; Morel, A.; Babin, M.; Allali, K.; Claustre, H. Variations of light absorption by suspended particles with chlorophyllaconcentration in oceanic (case 1) waters: Analysis and implications for bio-optical models. J. Geophys. Res. Ocean. 1998, 103, 31033–31044. [Google Scholar] [CrossRef]
- Ocean OpticsWeb Book. Available online: https://www.oceanopticsbook.info (accessed on 1 April 2022).
- Nelson, N.B.; Siegel, D.A. The global distribution and dynamics of chromophoric dissolved organic matter. Ann. Rev. Mar. Sci. 2013, 5, 447–476. [Google Scholar] [CrossRef]
- Austin, R.; Petzold, T. Visibility Laboratory Scripps Institution of Oceanography. In Oceanography from Space; Institute of Ocean Sciences: Sidney, BC, Canada, 1981; p. 239. [Google Scholar]
- Mobley, C.D.; Sundman, L.K.; Boss, E. Phase function effects on oceanic light fields. Appl. Opt. 2002, 41, 1035–1050. [Google Scholar] [CrossRef] [Green Version]
- Henyey, L.G.; Greenstein, J.L. Diffuse radiation in the galaxy. Astrophys. J. 1941, 93, 70–83. [Google Scholar] [CrossRef]
- Gabriel, C.; Khalighi, M.-A.; Bourennane, S.; Léon, P.; Rigaud, V. Monte-Carlo-based channel characterization for underwater optical communication systems. J. Opt. Commun. Netw. 2013, 5, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Chowdhary, J.; Cairns, B.; Travis, L.D. Contribution of water-leaving radiances to multiangle, multispectral polarimetric observations over the open ocean: Bio-optical model results for case 1 waters. Appl. Opt. 2006, 45, 5542–5567. [Google Scholar] [CrossRef]
- Morel, A.; Maritorena, S. Bio-optical properties of oceanic waters: A reappraisal. J. Geophys. Res. Ocean. 2001, 106, 7163–7180. [Google Scholar] [CrossRef] [Green Version]
- Sullivan, J.M.; Twardowski, M.S. Angular shape of the oceanic particulate volume scattering function in the backward direction. Appl. Opt. 2009, 48, 6811–6819. [Google Scholar] [CrossRef]
- Dong, F.; Xu, L.; Jiang, D.; Zhang, T. Monte-Carlo-Based Impulse Response Modeling for Underwater Wireless Optical Communication. Prog. Electromagn. Res. M 2017, 54, 137–144. [Google Scholar] [CrossRef] [Green Version]
- Fournier, G.R.; Forand, J.L. Analytic phase function for ocean water. In Proceedings of the Ocean Optics XII, Bergen, Norway, 13–15 June 1994; pp. 194–201. [Google Scholar]
- Kattawar, G.W. A three-parameter analytic phase function for multiple scattering calculations. J. Quant. Spectrosc. Radiat. Transf. 1975, 15, 839–849. [Google Scholar] [CrossRef] [Green Version]
- Petzold, T.J. Volume Scattering Functions for Selected Ocean Waters; Scripps Institution of Oceanography: La Jolla, CA, USA, 1972. [Google Scholar]
- Chen, P.; Pan, D.; Mao, Z.; Liu, H. Semi-analytic Monte Carlo radiative transfer model of laser propagation in inhomogeneous sea water within subsurface plankton layer. Opt. Laser Technol. 2019, 111, 1–5. [Google Scholar] [CrossRef]
- Feygels, V.I.; Wright, C.W.; Kopilevich, Y.I.; Surkov, A.I. Narrow-Field-of-View Bathymetrical Lidar: Theory and Field Test. In Proceedings of the Optical Science and Technology, SPIE’s 48th Annual Meeting, San Diego, CA, USA, 3–8 August 2003; p. 5155. [Google Scholar]
- Moore, C.C.; Bruce, E.J.; Pegau, W.S.; Weidemann, A.D. WET Labs ac-9: Field calibration protocol, deployment techniques, data processing, and design improvements. In Proceedings of the Ocean Optics XIII, Halifax, UK, 22–25 October 1996; pp. 725–730. [Google Scholar]
- Allocca, D.M.; London, M.A.; Curran, T.P.; Concannon, B.M.; Contarino, V.M.; Prentice, J.; Mullen, L.J.; Kane, T.J. Ocean water clarity measurement using shipboard lidar systems. In Proceedings of the International Symposium on Optical Science & Technology, San Diego, CA, USA, 29 July–3 August 2001. [Google Scholar]
- Clough, S.A.; Iacono, M.J.; Moncet, J.-L. LBLRTM: Line-By-Line Radiative Transfer Model. Astrophys. Source Code Libr. 2014, ascl:1405.1001. [Google Scholar]
- Mu Oz-Anderson, M.; Ez, R.M.-N.; Hernández-Walls, R.; González-Silvera, A.; Santamaría-Del-Ángel, E.; Rojas-Mayoral, E.; Galindo-Bect, S. Fitting vertical chlorophyll profiles in the California Current using two Gaussian curves. Limnol. Oceanogr. Methods 2015, 13, 416–424. [Google Scholar] [CrossRef]
- Peng, C.; Zhihua, M.; Zhenhua, Z.; Hang, L.; Delu, P. Detecting subsurface phytoplankton layer in Qiandao Lake using shipborne lidar. Opt. Express 2020, 28, 558–569. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| j | |||
|---|---|---|---|
| 1 | 0.41 | 3250 | 210 |
| 2 | 0.39 | 3425 | 175 |
| 3 | 0.10 | 3530 | 140 |
| 4 | 0.10 | 3625 | 140 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, S.; Chen, P.; Ding, L.; Pan, D. A New Semi-Analytical MC Model for Oceanic LIDAR Inelastic Signals. Remote Sens. 2023, 15, 684. https://doi.org/10.3390/rs15030684
Chen S, Chen P, Ding L, Pan D. A New Semi-Analytical MC Model for Oceanic LIDAR Inelastic Signals. Remote Sensing. 2023; 15(3):684. https://doi.org/10.3390/rs15030684
Chicago/Turabian StyleChen, Su, Peng Chen, Lei Ding, and Delu Pan. 2023. "A New Semi-Analytical MC Model for Oceanic LIDAR Inelastic Signals" Remote Sensing 15, no. 3: 684. https://doi.org/10.3390/rs15030684