4.1. Analyzing the Increments of Initial Fields
To improve the fidelity of the numerical model simulations, the initial analysis fields should demonstrate similarity to the real world. Thus, the contribution of each simulation to improving the rainfall forecast can be established by analyzing the increments of the initial fields. An enhancement in water vapor content is associated with changes in the thermodynamic process that may contribute to wind field changes. In addition, changes in dynamic winds should primarily result from changes in the pressure fields. Thus, understanding that the wind, pressure, and temperature fields are modified in the initial field through each simulation is crucial. The horizontal and vertical increments were analyzed at the end of the cycling assimilation window to evaluate the impact of each simulation.
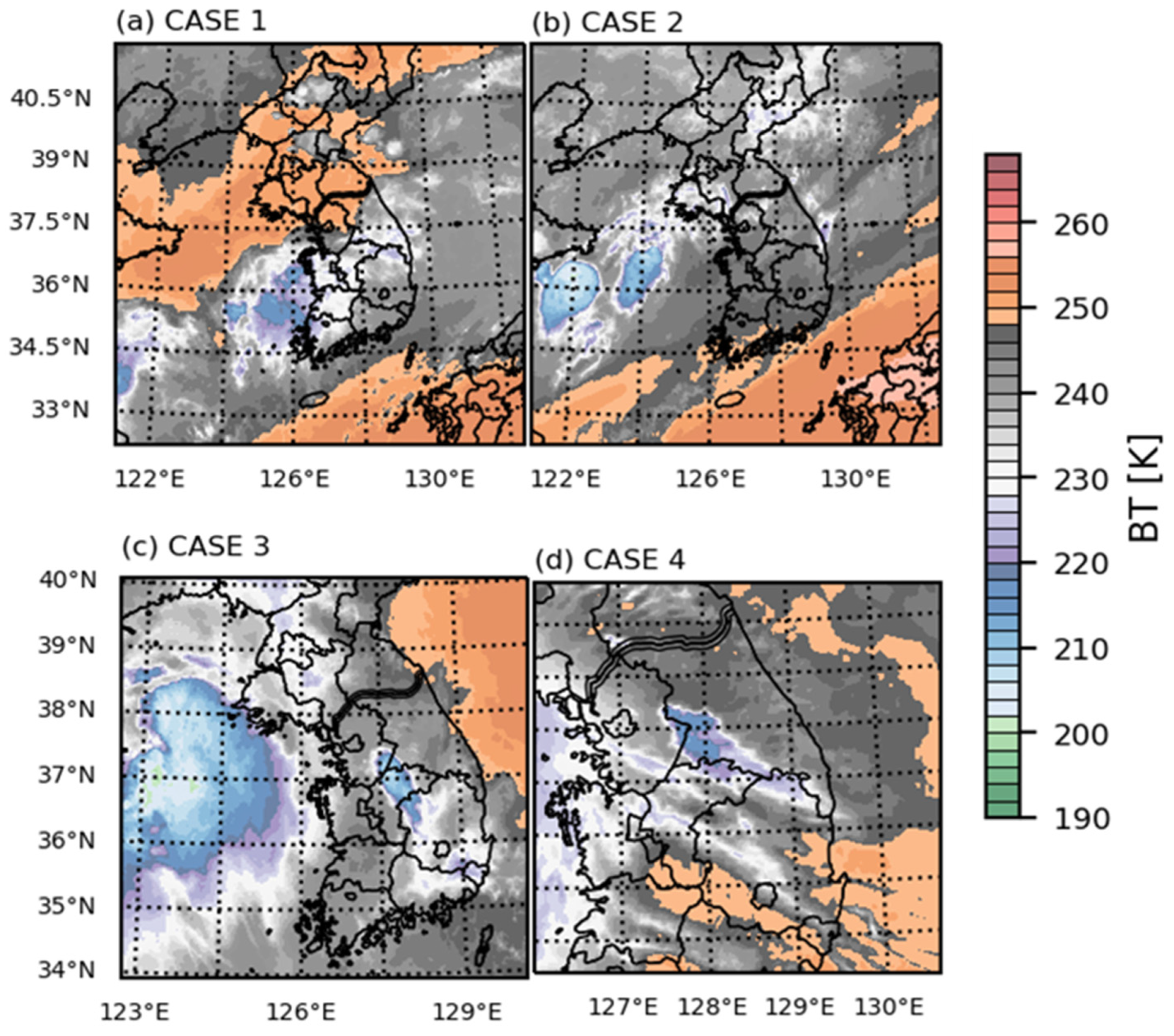
Figure 4 displays the satellite observations of the brightness temperature (K) for the channel of a 6.9 μm water vapor wavelength at the last data assimilation cycle for each case.
Figure 5,
Figure 6 and
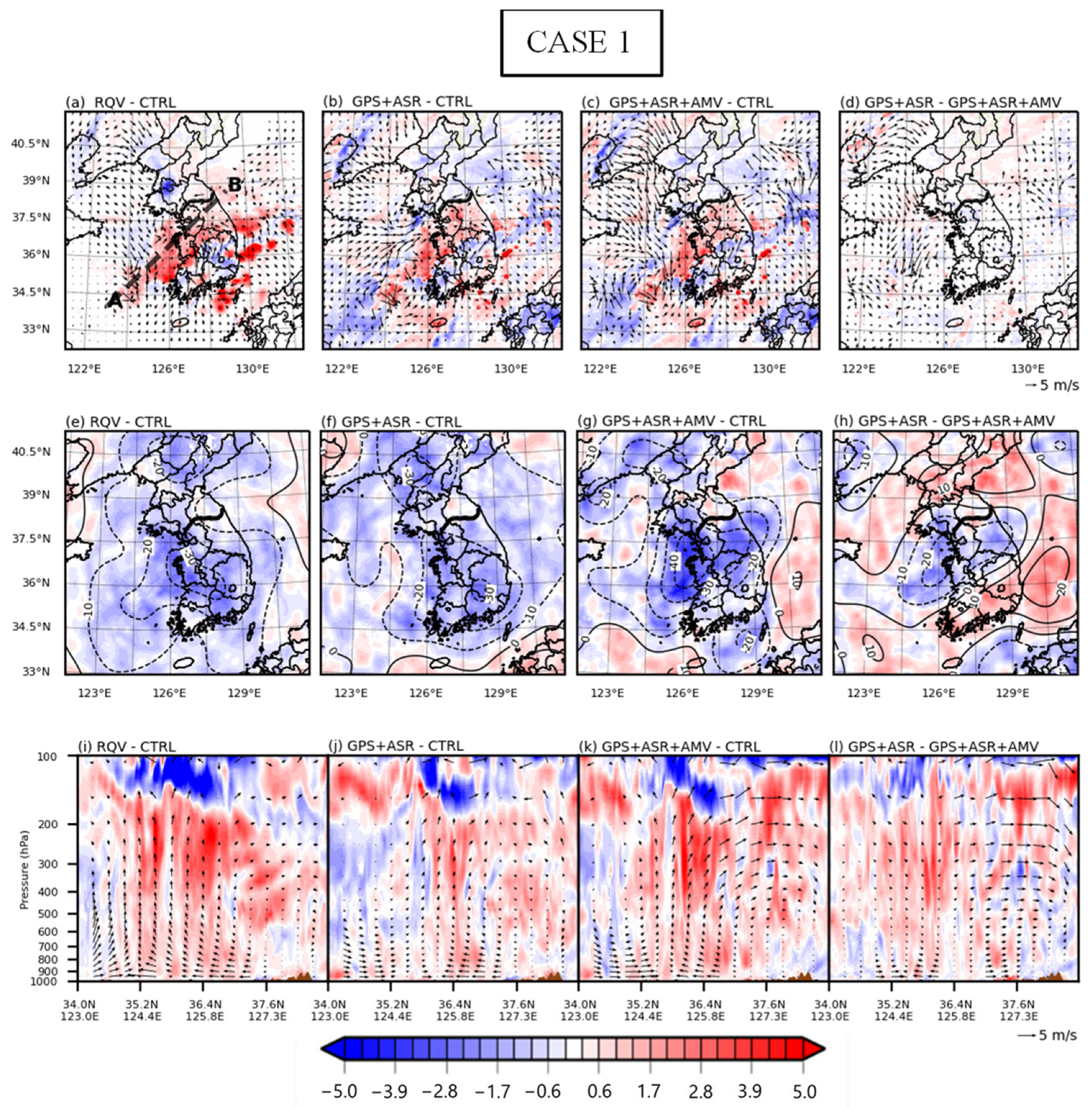
Figure 7 show the increment of the water vapor mixing ratio (g kg
−1) overlaid by wind (m s
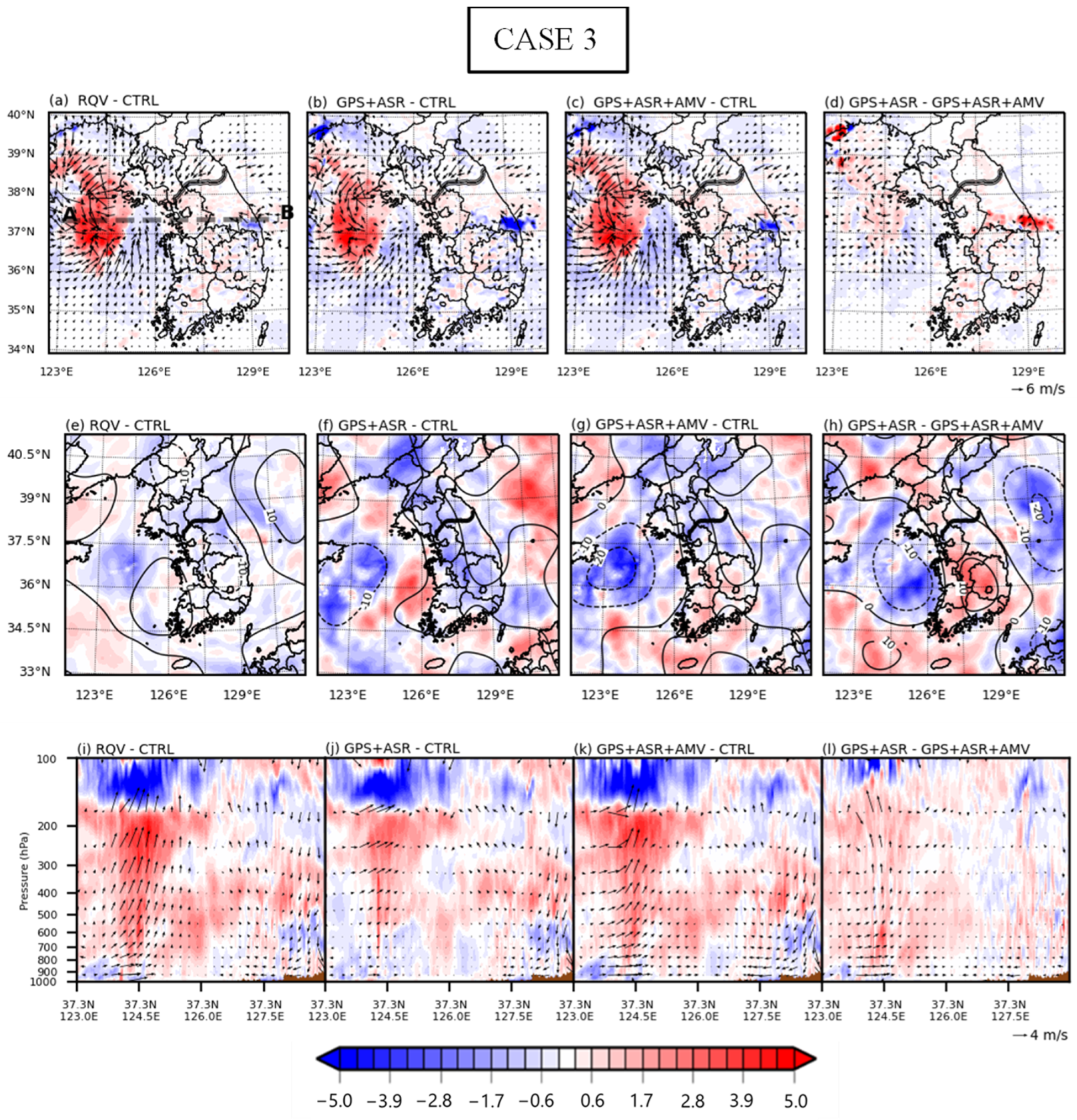
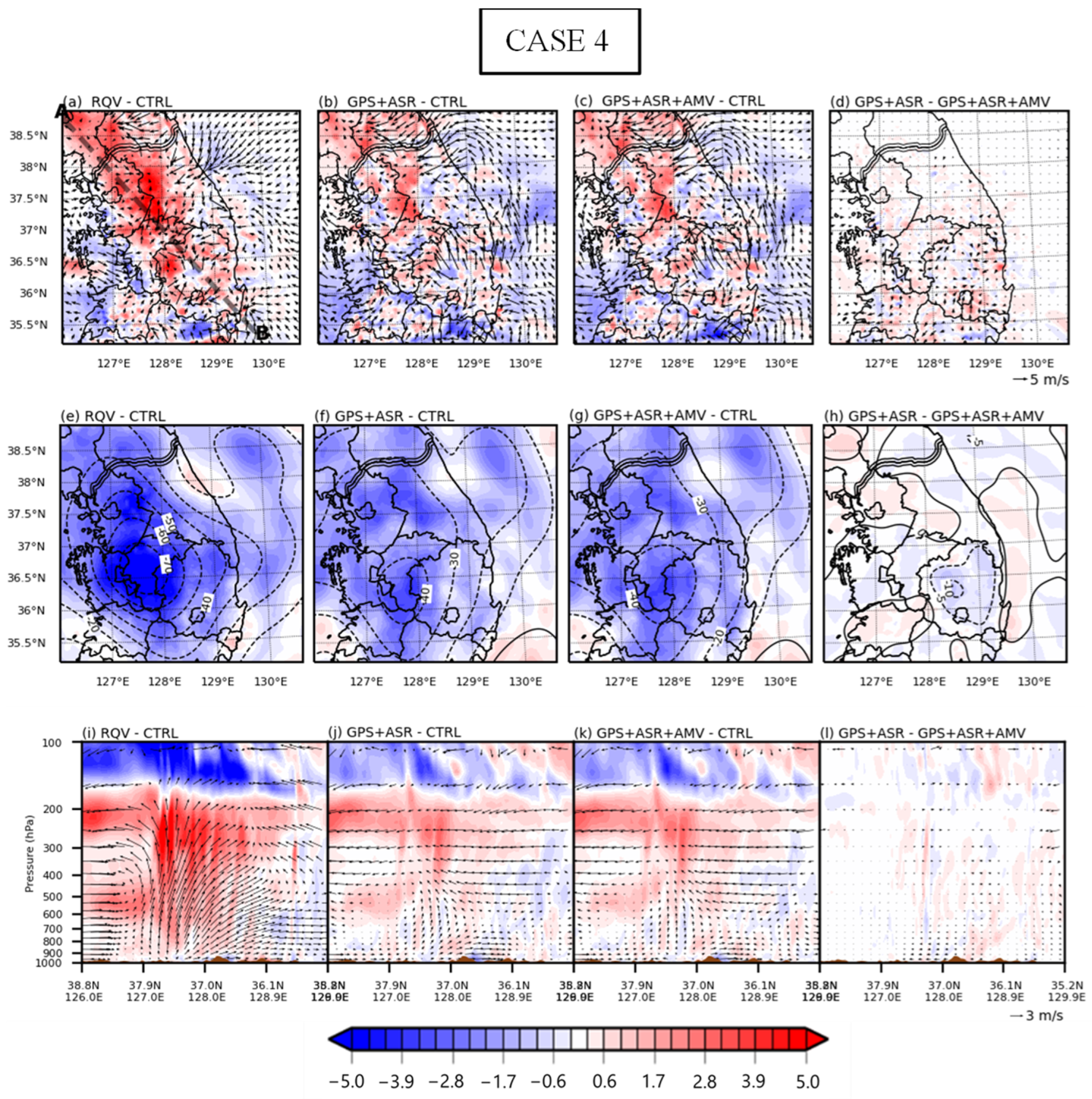
−1) at 850 hPa, the perturbation pressure (hPa) overlaid by the geopotential height (meter) at 850 hPa, and the vertical (A-B line) perturbation temperature (K) overlaid by the wind (u, w × 5 m s
−1) for Cases 1, 3, and 4, respectively. Domain 2 was used for domain analysis increments, but domain 2 was cropped on Cases 3 and 4, focusing on the location of the rainfall systems for a clear picture. The 850 hPa level was chosen because this level is generally used to identify air masses and to locate warm and cold fronts.
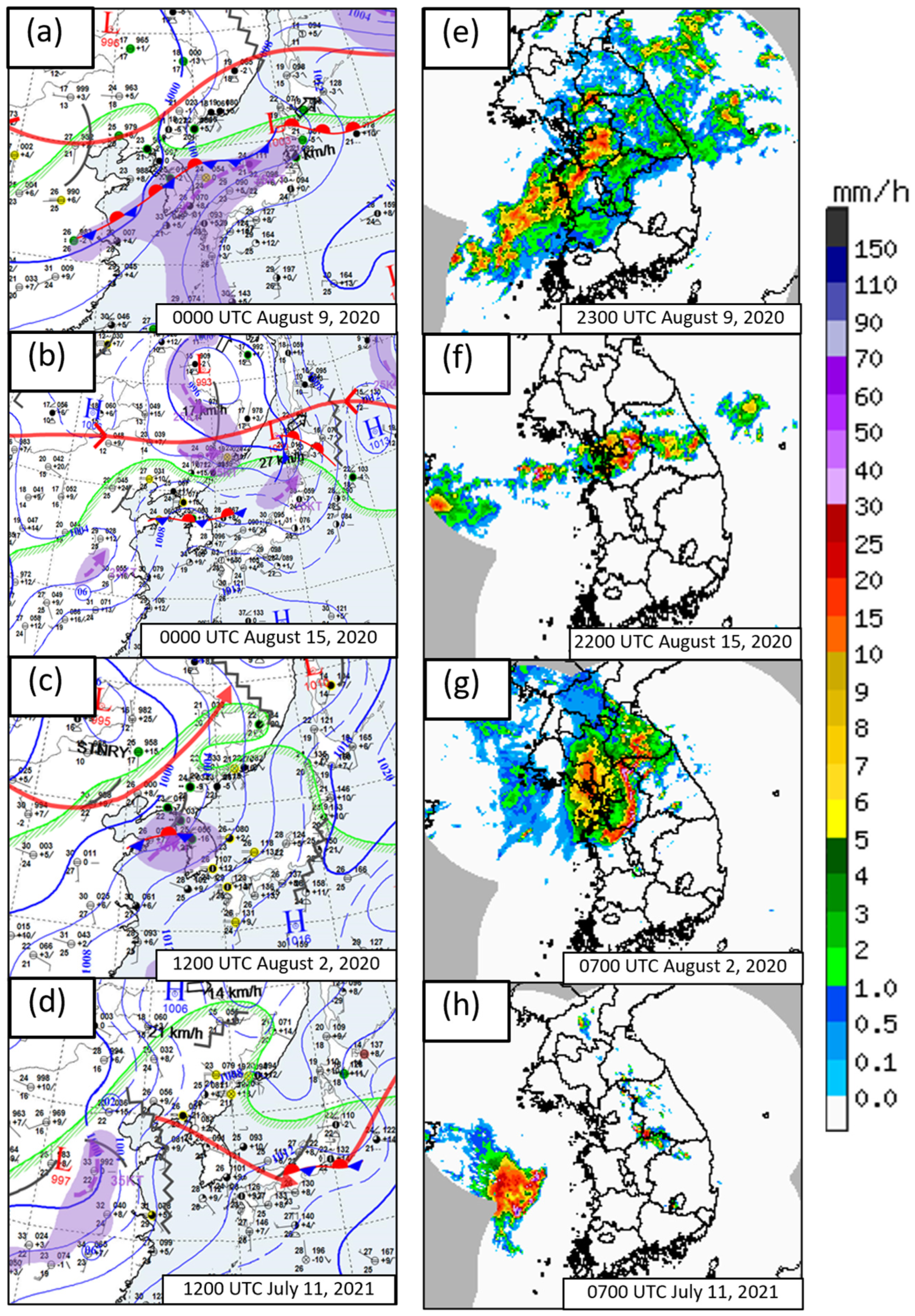
In Case 1, the BT observation from the satellite shows convective elements over the east of the Yellow Sea, denoted by BT < 220 K, which are associated with moister atmospheric conditions (
Figure 4a). RQV showed a strong magnitude of the positive water vapor mixing ratio in the larger areas over the east of the Yellow Sea at approximately 4.5 g kg
−1 (
Figure 5a). Such an increment may cause the overprediction of rainfall. GPS + ASR also increased the water vapor mixing ratio, which was approximately 4.5 g kg
−1, in smaller areas compared to RQV (
Figure 5b). GPS + ASR + AMV showed similarity with GPS + ASR in the increment of the water vapor mixing ratio over the convective area (
Figure 5c), as indicated by small differences in the water vapor content between GPS + ASR + AMV and GPS + ASR (
Figure 5d). Clearly, the positive water vapor increments in RQV, GPS + ASR, and GPS + ASR + AMV were associated with increases in blowing wind from the northwest to the Yellow Sea of approximately 2 m s
−1, 2 m s
−1, and 4.5 m s
−1, respectively, enhancing the convergence (
Figure 5a–c). This result was mainly caused by the intensified low-pressure regions over the eastern Yellow Sea (
Figure 5e–g). However, there was a slight gradient of perturbation pressure in GPS + ASR at approximately 35.8°N 124°E before the convection area was reached (
Figure 5f). This increment changed the wind direction, moving from northwesterly to easterly, and weakened the convergence over the convection area (
Figure 5b). GPS + ASR + AMV showed the most intensification of low perturbation pressure over the convection area at approximately 4.5 hPa (
Figure 5g), increasing the wind convergence (
Figure 5c). In addition, the highest gradient of geopotential height in GPS + ASR + AMV was mostly observed in the northwest, with strong northwesterly winds that brought relatively dry air (
Figure 5g). Hence, there was little enhancement of the water vapor content in GPS + ASR + AMV compared to GPS + ASR, resulting in similar water vapor increments, as mentioned above (
Figure 5d). The strong increase in water vapor in experiment RQV, as mentioned above (
Figure 5a), resulted in the release of more latent heat, as indicated by the deep perturbation temperature centered at 500–200 hPa (
Figure 5i). RQV generated a higher scale of strong perturbation temperature by approximately 4.5 K than CTRL, indicating a moister area (
Figure 5i). GPS + ASR produced a warm core over the convective area for approximately 3 K centered at 500–200 hPa, with a smaller scale and magnitude than RQV (
Figure 5j). Along the deep perturbation area, the updraft wind increased. GPS + ASR + AMV exhibited more wind convergence for 1.5 m s
−1 at approximately 35.8°N–124°E than GPS + ASR, indicating a stronger updraft motion than in GPS + ASR (
Figure 5k,l). Thus, the condensation of the water vapor in GPS + ASR + AMV was accelerated, releasing more latent heat that indicates that the perturbation temperature analysis increments were higher by 2 K and centered at 500–200 hPa when compared to GPS + ASR (
Figure 5l).
In Case 2, the satellite water vapor image shows a BT lower than 220 K over the Yellow Sea at approximately 36°N–122°E and 36.6°N–124°E, indicating convective clouds (
Figure 4b). Further examination of the analysis increment in Case 2 indicates that GPS + ASR + AMV exhibited more water vapor, approximately 4 g kg
−1, over the two locations of the convective systems, as shown by satellite observations, compared to the other experiments. In the perturbation pressure and temperature fields, GPS + ASR + AMV increased the low perturbation pressure and the positive increment of temperature over the convergence region. In addition, it is also noteworthy that RQV showed more positive temperature perturbation increments at approximately 37.6°N–127°E at the surface to 800 hPa than other simulations, increasing winds toward the northeast. This resulted in the precipitation being shifted to the northeast in RQV.
In Case 3, the BT observation reveals that the MCS approached from the north of the Yellow Sea toward the Korean Peninsula during the Changma front and shows the convective elements in the precipitation area (on the border of Gyeonggi and Gangwon Province) (
Figure 4c). From
Figure 6, it can be inferred that RQV, GPS + ASR, and GPS + ASR + AMV produced positive water vapor mixing ratios of approximately 5 g kg
−1 and 0.8 g kg
−1 over the MCS and precipitation area, respectively, compared to CTRL (
Figure 6a–c). However, the coverage of the positive water vapor analysis increment area (5 g kg
−1) in GPS + ASR was observed to be smaller than that of RQV (
Figure 6a,b). Meanwhile, GPS + ASR + AMV increased the water vapor over the MCS area by 0.5 g kg
−1 when compared to GPS + ASR (
Figure 6d). The positive water vapor mixing ratio increments in RQV, GPS + ASR, and GPS + ASR + AMV were associated with the wind convergence at approximately 6 m s
−1, 3 m s
−1, and 5 m s
−1, respectively (
Figure 6a–c). This result is interrelated with the intensified low perturbation pressure over the MCS area in RQV, GPS + ASR, and GPS + ASR + AMV, with slightly different magnitudes and distributions (
Figure 6e–g). RQV produced stronger increments of low pressure than GPS + ASR and GPS + ASR + AMV over 37.8°N 124.3°E at approximately 5 hPa (
Figure 6e), while the other areas increased by approximately 3 hPa (
Figure 6f,g). Such an increment caused stronger wind convergence. GPS + ASR increased the low perturbation pressure by approximately 2.5 hPa over most of the MCS area (
Figure 6f), while GPS + ASR + AMV clearly intensified at approximately 4.5 hPa (
Figure 6g). This convergence mainly came from the Yellow Sea, which broughtmoist air; hence, there was an increased in the water vapor mixing ratio over the MCS area in GPS + ASR + AMV when compared to GPS + ASR (
Figure 6d). In addition, GPS + ASR + AMV produced the strongest westerly trough, extending to the precipitation area and increasing the wind toward the precipitation area that brought moist air from the MCS (
Figure 6h). This result may present a rainfall distribution with larger coverage in the precipitation area. RQV increased the perturbation temperature by approximately ≥4.5 K over the core of the MCS area (approximately 37.3°N–124.5°E), centered at 300–250 hPa, when compared to CTRL (
Figure 6i). GPS + ASR exhibited a higher perturbation temperature than CTRL by approximately 3 K and an updraft by approximately 1 m s
−1 over the MCS area centered at the 500–200 hPa level, with a clearly shallower warm core than RQV (
Figure 6j). GPS + ASR + AMV increased the perturbation temperature more than GPS + ASR by approximately 3 K and 0.5 K at the 800–500 hPa and 500–200 hPa levels, respectively (
Figure 6k,l). These results were also associated with an increase in the updraft of approximately 3 m s
−1, indicating that GPS + ASR + AMV produced a stronger convection of the MCS than GPS + ASR (
Figure 6l).
In Case 4, the satellite water vapor image shows a convective band centered between Gyeonggi and Gangwon Provinces (approximately 37.5°N–128°E) denoted by BT < 220 K (
Figure 4d). From
Figure 7, it can be inferred that RQV produced a larger coverage of water vapor content of approximately 5 g kg
−1 when compared with the CTRL experiment (
Figure 7a). Such an increment may produce a strong convective band. GPS + ASR increased the water vapor mixing ratio centered between Gyeonggi and Gangwon Provinces which was much closer to the BT observations (
Figure 7b). GPS + ASR and GPS + ASR + AMV have similar water vapor contents, as indicated by small differences (
Figure 7c,d). RQV, GPS + ASR, and GPS + ASR + AMV clearly increased the low perturbation pressures over the precipitation area by approximately 5, 3, and 3 hPa, respectively (
Figure 7e–g), thus intensifying the wind convergence around the precipitation area by approximately 5 m s
−1 (
Figure 7a–c). In addition, RQV produced a much larger coverage of low perturbation pressure (
Figure 7e), immensely strengthening the wind convergence (
Figure 7a) when compared to GPS + ASR and GPS + ASR + AMV. GPS + ASR and GPS + ASR + AMV produced similar distributions of low perturbation pressure and wind convergence (
Figure 7f,g) except that the increment of low perturbation pressure in GPS + ASR + AMV is higher by approximately 0.5 hPa over 36.2°N 128.5°E, inducing the northwesterly trough toward the convective area (
Figure 7h). This result promoted stronger wind (0.5 m s
−1) from the southwest, which slightly enhanced the wind convergence over the precipitation area in GPS + ASR + AMV (
Figure 7d). The increased water vapor and wind convergence in RQV caused a strong updraft which accelerated the condensation of water vapor, creating a deep, warm core on the upper level of approximately 5 K, centered at 300 hPa (
Figure 7i). These results suggest the development of deep convection. GPS + ASR also produced a deep, warm core at the upper level but at a smaller scale and at a lower magnitude of only 3 K (
Figure 7j). GPS + ASR + AMV showed similarity to GPS + ASR (
Figure 7j,k) except for the warm core in GPS + ASR + AMV, which was slightly stronger by 0.5 K at approximately 37.0°N–128.0°E (
Figure 7l).
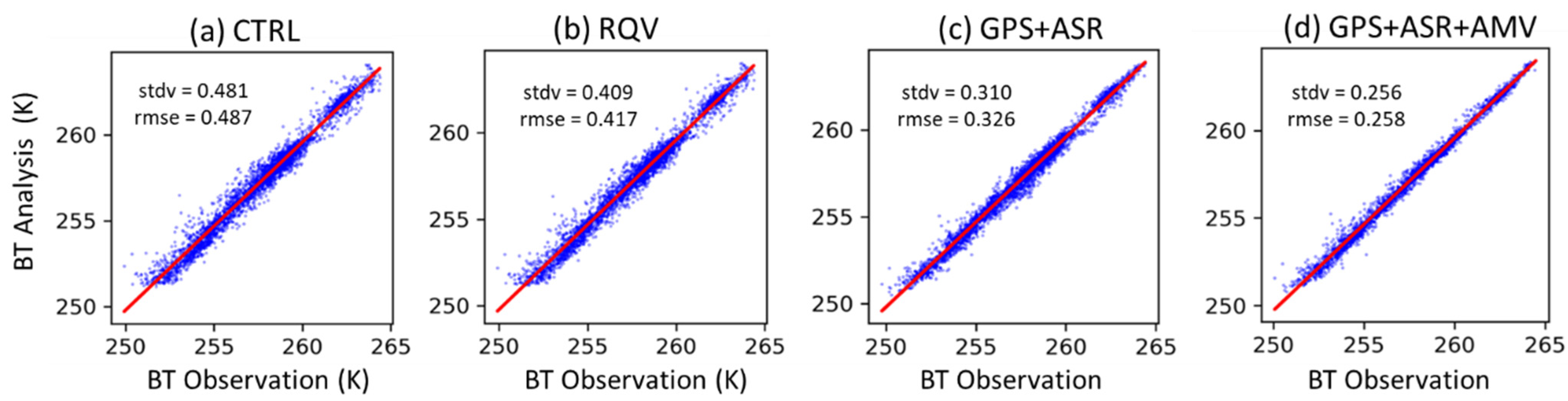
Figure 8 displays the scatter plots of the BT observations and the CRTM-simulated BT values at channel 10. Channel 10 was chosen for this analysis because this channel is more sensitive to clouds than any other water vapor channels (channel 8–10) [
49]. The BT analysis for each simulation was simulated by CRTM using the pressure, temperature, water vapor, and water content of six hydrometeor types (rain, snow, ice, graupel, and hail) as input for the analysis model. Compared to CTRL, RQV reduced the standard deviation (STDV) and RMSE to 0.409 (by almost 15%) and 0.417 (by almost 14%). Meanwhile, GPS + ASR + AMV clearly simulated BT values closer to the observational values than other simulations, with reductions in the STDV to 0.256 (by almost 46%) and in the RMSE to 0.258 (by almost 47%). Further, the improvement of the BT in GPS + ASR + AMV was greatly superior to the BT in GPS + ASR (by almost 17% in the STDV and 20% in the RMSE). Such an improvement explains that the assimilation of AMVs also improved the pressure and temperature in GPS + ASR + AMV due to the link between the mass field and dynamic changes from AMV winds, leading to significant changes in the rainfall forecasts.
4.2. Analysis of Water Vapor and Dynamical Processes
To better understand the water vapor distribution and dynamics after using the modified variables in the initial fields, several kinds of weather charts are displayed for each simulation. Moisture convergence and flux represent the moisture process associated with precipitation. This study derived the water vapor convergence (
and water vapor flux (
, which indicate that the magnitude and direction of the water vapor maintains rainfall, while the vertical velocity depicts vertical motion. A positive vertical velocity denotes a rising motion associated with precipitation.
Figure 9 and
Figure 10 show the water vapor convergence (g kg
−1 s
−1) overlaid by the water vapor flux (g kg
−1 m s
−1) vectors at 850 hPa and the vertical velocity (hPa h
−1) overlaid by the wind (m s
−1) at 700 hPa.
In Case 1, at 850 hPa, converging water vapor in the eastern region of the Yellow Sea and water vapor flux toward the precipitation area (Chungcheongnam and Gyeonggi Provinces) were generated in all experiments (
Figure 9a–d). CTRL slightly captured water vapor convergence (60
10
−6 g kg
−1 s
−1) in the eastern region of the Yellow Sea and flux (325 g kg
−1 m s
−1) toward the precipitation area (
Figure 9a). RQV showed stronger and wider coverage of the water vapor convergence (90
10
−6 g kg
−1 s
−1) in the Yellow Sea and flux (480 g kg
−1 m s
−1) toward the precipitation area than in other simulations (
Figure 9b). This was mainly caused by the excessive water vapor in the initial field, as mentioned above (
Figure 5a). GPS + ASR exhibited moisture convergence (75 g kg
−1 m s
−1) in the Yellow Sea and flux (450 g kg
−1 m s
−1) toward the precipitation area at a lower intensity and narrower scale than RQV (
Figure 9c). Lastly, GPS + ASR + AMV evidently intensified the water vapor convergence to a greater extent than GPS + ASR by approximately 90
10
−6 g kg
−1 s
−1, but the coverage was smaller than RQV (
Figure 9d). The water vapor flux in GPS + ASR + AMV was of a similar magnitude to GPS + ASR at approximately 450 g kg
−1 m s
−1, but the coverage in GPS + ASR + AMV was smaller than GPS + ASR (
Figure 9c,d). These results suggest that GPS + ASR + AMV had the optimal amount of moisture convergence and flux, leading to the accuracy of the rainfall prediction in terms of intensity and coverage. At 700 hPa, CTRL exhibited a lower vertical velocity by approximately 50 hPa h
−1 when compared to the other simulations over the convergence area (east of the Yellow Sea) (
Figure 10a). RQV, GPS + ASR, and GPS + ASR + AMV enhanced the strong vertical velocity above −75 hPa h
−1 over the eastern region of the Yellow Sea, as expected with the enhancement of the convergence at 850 hPa (
Figure 10b–d). However, RQV produced a strong vertical velocity (≥−75 hPa h
−1) at a larger scale than GPS + ASR and GPS + ASR + AMV, extending to Chungcheongnam Province (
Figure 10b–d). Over the inland Republic of Korea (near the northern region of Gyeonggi Area), only GPS + ASR + AMV exhibited a vertical velocity at approximately −65 hPa h
−1, suggesting that only GPS + ASR + AMV may be capable of capturing significant rainfall over the northern part of the Gyeonggi Area (
Figure 10d).
In Case 2, at 850 hPa, CTRL was unable to generate the convergence over the convective area as there was no wind convergence enhancement (
Figure 9e), while water vapor convergence (90
10
−6 g kg
−1 s
−1) and flux (280 g kg
−1 m s
−1) over the main convective area (approximately 36.6°N–124°E) were evidently observed in RQV, GPS + ASR, and GPS + ASR + AMV, with the largest scale observed in GPS + ASR + AMV (
Figure 9f–h). GPS + ASR and GPS + ASR + AMV also showed convergence over the other convective area (36°N–122°E) (
Figure 9g,h). In addition, over the inland Gyeonggi and Gangwon Provinces (the precipitation area), the magnitude of the water vapor flux in RQV was higher by approximately 100 g kg
−1 m s
−1 when compared to other simulations (
Figure 9f). This result suggests that RQV may produce intense rainfall at the earlier hours of the forecast. Moreover, the direction of the water vapor flux in RQV was slightly turned northeast, which does not enhance the propagated west–east direction of the Changma front (
Figure 9f). At 700 hPa, it can be inferred that CTRL exhibited almost zero vertical velocity when compared to other simulations over the convective area (approximately 36.6°N–124°E) (
Figure 10e), which was associated with zero convergence at 850 hPa (
Figure 9e). RQV, GPS + ASR, and GPS + ASR + AMV generated a vertical velocity of approximately ≥−60 hPa h
−1 in the convective area (36.6°N–124°E) (
Figure 10f–h), as expected with strong convergence at 850 hPa (
Figure 9e–h). Moreover, GPS + ASR and GPS + ASR + AMV produced vertical velocities of 40 hPa h
−1 and 45 hPa h
−1, respectively, at 36°N–122°E (
Figure 10g,h). This result suggests that GPS + ASR + AMV enhanced the development of the convective system along the Changma front (
Figure 10h).
In Case 3, at 850 hPa, water vapor convergence was evidently seen over the MCS and precipitation area in all experiments (
Figure 9i–l). However, only RQV, GPS + ASR, and GPS + ASR + AMV were able to intensify the water vapor convergence by approximately 90
10
−6 g kg
−1 s
−1 at the center of the MCS (
Figure 9j–l). Due to the increased water vapor convergence, the moisture flux was also increased by approximately 350 g kg
−1 m s
−1 (
Figure 9j–l). Over the precipitation area, the water vapor convergence and flux were also intensified in RQV, GPS + ASR, and GPS + ASR + AMV, with differences in scale or magnitude (
Figure 9j–l). RQV mainly generated water vapor convergence (≥75 × 10
−6 g kg
−1 s
−1) that extended more toward Gangwon Province or on a larger scale than in GPS + ASR or GPS + ASR + AMV (
Figure 9j). Meanwhile, GPS + ASR and GPS + ASR + AMV mainly produced water vapor convergence (≤75 × 10
−6 g kg
−1 s
−1) in the precipitation area, but the coverage of water vapor convergence in GPS + ASR + AMV was larger than the coverage of water vapor convergence in GPS + ASR (
Figure 9k,l). The water vapor flux toward the precipitation area in RQV was also larger by approximately 270 g kg
−1 m s
−1 (
Figure 9j). Meanwhile, GPS + ASR and GPS + ASR + AMV produced water vapor flux values of approximately 230 g kg
−1 m s
−1 and 250 g kg
−1 m s
−1, respectively (
Figure 9k,l). At 700 hPa, it can be observed that CTRL exhibited a very weak vertical velocity when compared to other simulations in the MCS and precipitation area (
Figure 10i) and an associated weak enhancement of convergence at 850 hPa (
Figure 9i). RQV, GPS + ASR, and GPS + ASR + AMV generated strong vertical velocities greater than 75 hPa h
−1 in the MCS area (
Figure 10j–l), as expected with the convergence enhancement at 850 hPa (
Figure 9j–l). However, GPS + ASR mainly simulated a strong vertical velocity at a smaller scale than RQV and GPS + ASR + AMV (
Figure 10k). Over the precipitation area, RQV, GPS + ASR, and GPS + ASR + AMV exhibited vertical velocities ≥−75 hPa h
−1 (
Figure 10j–l), but RQV had a larger scale than the other simulations (
Figure 10j). In addition, GPS + ASR + AMV mainly produced a vertical velocity (≤−75 hPa h
−1) over an increased coverage of the precipitation area than RQV or GPS + ASR (
Figure 10l).
In Case 4, at 850 hPa, it can be inferred that CTRL generated a weak water vapor convergence and flux over the precipitation area (the northeastern part of of Chungcheongbuk Province) (
Figure 9m). These results imply CTRL may not produce any precipitation. RQV showed the strongest water vapor convergence of approximately 90 × 10
−6 g kg
−1 s
−1 over the precipitation area, which was associated with a water vapor flux of approximately 150 g kg
−1 m s
−1; this may result in the overestimation of rainfall (
Figure 9n). GPS + ASR produced a weaker water vapor convergence (75 × 10
−6 g kg
−1 s
−1) and flux (125 g kg
−1 m s
−1) compared to RQV (
Figure 9o). GPS + ASR + AMV was similar to GPS + ASR, but the water vapor convergence was slightly intensified over the precipitation area by approximately 85 × 10
−6 g kg
−1 s
−1 (
Figure 9p). At 700 hPa, it can be observed that CTRL exhibited very weak vertical velocities when compared to other simulations in the precipitation area (
Figure 10m), associated with a weak convergence at 850 hPa (
Figure 9m). RQV generated the strongest vertical velocity of approximately 57 hPa h
−1 (with a maximum of 70 hPa h
−1) in the precipitation area (
Figure 10n), as expected with strong convergence at the lower level (
Figure 9n). GPS + ASR and GPS + ASR + AMV produced vertical velocities of approximately 32 and 37 hPa h
−1, suggesting that GPS + ASR + AMV enhanced the development of the convective band more when compared to GPS + ASR, thus increasing the accuracy in predicting the maximum precipitation.
4.4. Model Verification
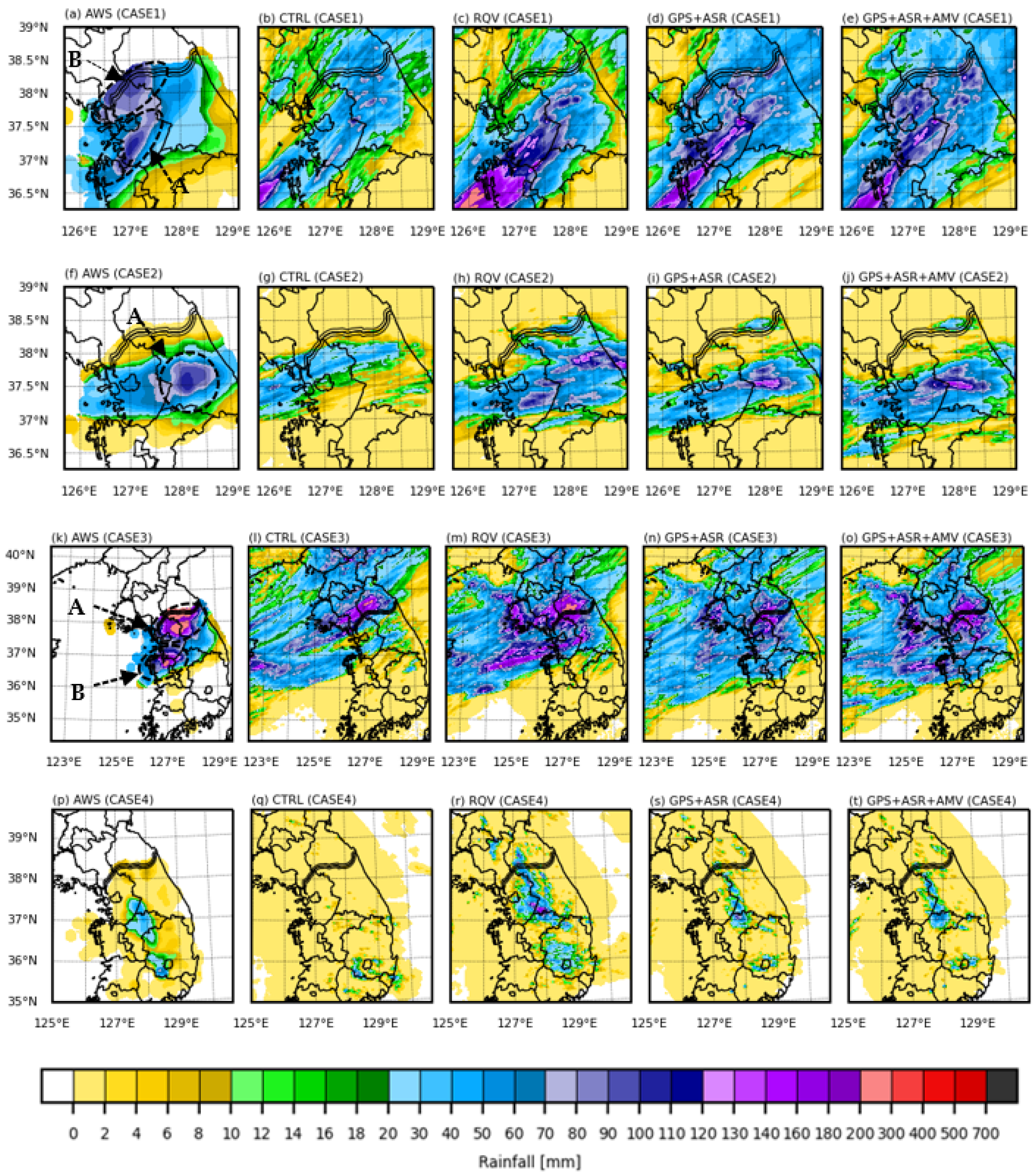
For Case 2, AWS observed an east-shifted rainband with a maximum precipitation reaching 120 mm over location A (
Figure 11f). CTRL captured a weak and broken east-shifted rainband and missed the intense rainfall over location A (
Figure 11g). Meanwhile, RQV generated the east-shifted precipitation well, but RQV missed the intense rainfall in location A and generated false alarms in the north and southwest of location A (
Figure 11h). GPS + ASR generated the east-shifted rainband and the maximum precipitation of location A (
Figure 11i). However, the east-shifted rainfall was narrower compared to the AWS observation, causing underprediction in some areas (
Figure 11i). In addition, the maximum precipitation in GPS + ASR exceeded 120 mm, which was evidently overestimated when compared to AWS (
Figure 11i). Meanwhile, GPS + ASR + AMV simulated the east-shifted rainfall well and more broadly than GPS + ASR while capturing the maximum precipitation of the location A; however, the intensity of the maximum precipitation overestimated the AWS (≥120 mm) (
Figure 11j). Overall, GPS + ASR + AMV achieved the closest results to the AWS observation when compared to the other simulations.
For Case 3, the AWS mainly observed intense rainfall which exceeded 200 mm over locations A and B (
Figure 11k). Evidently, CTRL did not generate rainfall for both locations A and B (
Figure 11l). RQV generated rainfall over location A with a maximum precipitation of 200 mm (
Figure 11m). However, the rainband was centered further north, causing the scale of rainfall on location A to be smaller than the AWS observations (
Figure 11m). RQV also generated rainfall further north of location B (
Figure 11m). Contrarily, GPS + ASR generated the rainfall centered slightly further south compared to RQV, which covered the rainfall area of location A better than RQV (
Figure 11n). However, GPS + ASR underpredicted the intensity of the rainfall over location A (≥200 mm) (
Figure 11n). For location B, GPS + ASR captured a slight rainfall of approximately 70 mm and clearly underestimated the AWS observations, though it reduced the underprediction by approximately 30 mm compared to the prediction of RQV (
Figure 11n). Meanwhile, GPS + ASR + AMV showed a larger scale of rainfall with a higher intensity (exceeded 200 mm) in location A than the other simulations, showing better agreement with the AWS observations (
Figure 11o). Moreover, GPS + ASR + AMV also captured rainfall events with intensities of ≥70 mm over location B; this is a higher intensity than other simulations and is closer to the AWS observations (
Figure 11o).
A convective band occurred in Case 4 which caused rainfall in Chungcheongbuk Province and in some parts of Gyeongsangbuk Province, as observed by AWS, with a maximum precipitation of 70 mm (
Figure 11p). Evidently, CTRL missed the main convective band rainfall in Chungcheongbuk Province and overestimated the small precipitation (±30 mm) in Gyeongsangbuk Province (
Figure 11q). Meanwhile, RQV simulated a strong precipitation band (exceeded 120 mm), but the rainband was further north of Chungcheongbuk Province (
Figure 11r). This strong rainband caused overpredictions in some areas of Gangwon Province and missed the rainfall in some areas of Chungcheongbuk Province (
Figure 11r). The overestimation in Gyeongsangbuk Province also remained in RQV with larger coverage than in CTRL (
Figure 11r). GPS + ASR captured the rainband further south of Chungcheongbuk Province when compared to RQV (
Figure 11s). The intensity of the rainfall in GPS + ASR was mainly 70 mm (with the maximum exceeding 70 mm), and it was slightly overestimated when compared to AWS (
Figure 11s). GPS + ASR + AMV also generated a precipitation similar to GPS + ASR, which may have been caused by the inclusion of AMV into the assimilation. which did not significantly influence the convective band case (
Figure 11t). However, the rainfall distribution in GPS + ASR + AMV was slightly larger than in GPS + ASR, with the maximum precipitation only reaching 70 mm, which is closer to the AWS observations (
Figure 11t).
4.5. Quantitative Forecast Evaluation
A quantitative verification was performed on the hourly rainfall to evaluate the forecast leading time.
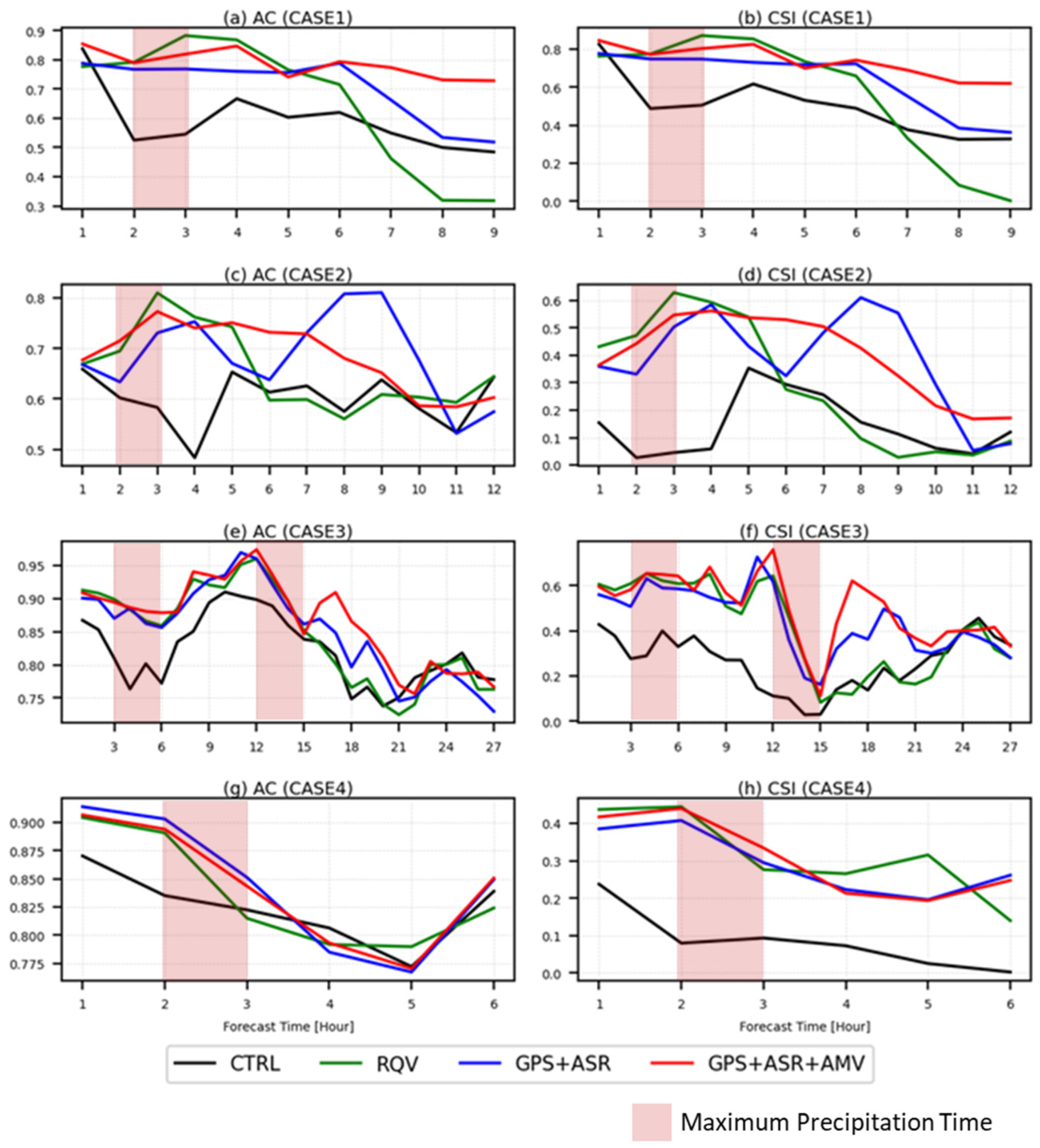
Figure 12 shows the categorical rainfall ≤ 0.1 mm (AC and CSI) using the forecast models and the AWS data of every 1 h forecast for Cases 1, 2, 3, and 4, respectively. The influence distance of the AWS in Republic of Korea was effectively 10 km × 10 km. Thus, the precipitation from the models of domain 3 averaged nine grid points when compared to the AWS.
For Case 1 (
Figure 12a,b), due to the underprediction of rainfall, CTRL showed the lowest AC and CSI scores in terms of rainfall classification because CTRL missed the rainfall for all the forecast times. RQV increased the AC and CSI scores by approximately 45% only during the first 6 h compared to CTRL and had the worst AC and CSI scores relative to the other experiments. Both the AC and CSI scores of GPS + ASR also showed an increase (of approximately 35%) when compared to CTRL until the sixth hour, but at later hours, both scores were reduced. GPS + ASR + AMV increased the scores less than RQV during the first 5 h because rainfall classification only determines precipitation larger than 0.1 mm but does not determine the extent of overestimation. Overall, at most forecast times, GPS + ASR + AMV showed higher AC and CSI scores than other experiments, especially near the forecast completion.
For Case 2 (
Figure 12c,d), the RQV experiment increased the AC and CSI scores by approximately 40% when compared to CTRL until the fifth hour before continuing to decrease and achieving a lower score compared to CTRL. GPS + ASR improved the AC and CSI scores by approximately 60% over time than CTR except at the sixth hour because there many false alarms occurred, while GPS + ASR + AMV increased the scores by approximately 65% during the first 9 h and by 20% after 9 h.
For Case 3 (
Figure 12e,f), due to the underestimation, CTRL’s AC and CSI scores were very low due to the missed rainfall. The RQV experiment showed an improvement in the AC and CSI scores of approximately 40% during the first 15 h, but the scores continued to decrease after the 15th hour. The improvements in the AC and CSI scores in GPS + ASR were not higher than RQV, but the improvement of GPS + ASR persisted for a longer period. GPS + ASR + AMV improved by roughly 18% when compared to GPS + ASR at most forecast times except at approximately the 12–15th hours due to the prediction of more false alarms when compared to GPS + ASR during these hours. In general, GPS + ASR + AMV increased the statistics’ scores for longer forecast times than other simulations.
For Case 4 (
Figure 12g,h), CTRL produced the lowest AC and CSI scores for most of the forecast times. RQV improved the AC score by ±10% when compared to CTRL during the first 2 h before decreasing. RQV mostly increased the CSI score by ±60% when compared to CTRL, except for the third and sixth hours. Considering the AC score, GPS + ASR and GPS + ASR + AMV increased the score by 5% and 7% when compared to CTRL during the first 3 h, respectively. Considering the CSI score, GPS + ASR and GPS + ASR + AMV increased the score by 50% and 58% when compared to CTRL throughout the forecast times, respectively. Overall, the best improvements were observed in GPS + ASR + AMV.
The cumulative rainfall forecasts were also verified with AWS observation data through quantitative error (RMSE and BIAS), the classification of rainfall occurrences (>0.1) (accuracy and CSI), and the pattern correlation method.
Table 3 shows the quantitative verification of the cumulative rainfall for Cases 1, 2, 3, and 4, as well as the average of all cases. For Case 1 (
Table 3), RQV increased the RMSE by approximately 35% compared to CTRL. This error was mainly caused by overestimation, as indicated by a BIAS value of 20.17 mm. Meanwhile, GPS + ASR showed a decrease in the RMSE by approximately 3% when compared to CTRL, with the BIAS of 9.5 mm indicating a decrease in overestimation by approximately 52% compared to RQV. GPS + ASR + AMV decreased the RMSE more, by approximately 12% when compared to CTRL, and the BIAS error was decreased by approximately 55% when compared to RQV. Considering the category classifications, the scores of all experiments were mostly comparable to CTRL. However, the best performances were achieved by GPS + ASR + AMV, with an increased score of 2% for AC and CSI when compared to CTRL. Pattern correlation indicates that RQV had the worst correlation due to the excessive overestimation, making it less correlated to the AWS observations. Meanwhile, GPS + ASR + AMV produced the best correlation, with an increase of approximately 50% compared to that of CTRL, because it captured the two locations of maximum rainfall.
For Case 2 (
Table 3), compared to CTRL, all experiments showed a reduction in the RMSE or BIAS error. RQV, GPS + ASR, and GPS + ASR + AMV decreased the RMSE by approximately 32%, 45%, and 46% respectively. RQV showed a 72% reduction of BIAS, though the BIAS value of 3.44 mm indicates overestimation. Moreover, GPS + ASR and GPS + ASR + AMV decreased the BIAS error by approximately 90% and 95%, respectively. However, GPS + ASR slightly underestimated (−1.7 mm), while GPS + ASR + AMV slightly overestimated (0.55 mm). The AC and CSI scores also exhibited an improvement in all experiments compared to that of CTRL. GPS + ASR and GPS + ASR + AMV produced the best performances, with AC and CSI score improvements of 11% and 20%, respectively. This could primarily be attributed to the correction of the maximum precipitation location. PC shows an increased correlation for all experiments when compared to CTRL. RQV, GPS + ASR and GPS + ASR + AMV produced comparable correlations with 71%, 74%, and 74.5% improvements, respectively.
For Case 3 (
Table 3), RQV, GPS + ASR, and GPS + ASR + AMV reduced the RMSE values by approximately 30%, 34%, and 38%, respectively. Additionally, the BIAS error indicates that RQV, GPS + ASR, and GPS + ASR + AMV reduced the underestimation by approximately 57%, 87%, and 89%, respectively. Considering the rainfall occurrences, the AC and CSI scores possess comparable values between the assimilation experiments. RQV, GPS + ASR, and GPS + ASR + AMV produced approximately 0.9%, 2.2%, and 4.4% improvements in the AC score, and improvements of approximately 0.24%, 4.35%, and 3.74% in the CSI score when compared to CTRL. The PC score reveals that GPS + ASR + AMV produced the best score, with an increased value of 60% compared to CTRL. Meanwhile, RQV and GPS + ASR increased by approximately 49% and 56%, respectively.
Considering Case 4 (
Table 3), RQV produced a reduction of only roughly 0.18% in the RMSE when compared to CTRL. Additionally, RQV generated a BIAS of 2.18 mm, indicating an overestimation. GPS + ASR and GPS + ASR + AMV show comparable reductions of 18% and 19% for RMSE and 22% and 34% for the BIAS error. GPS + ASR and GPS + ASR + AMV generated similar AC and CSI scores. Both improved the AC and CSI scores by 22% and 86%, respectively, compared to those of CTRL. RQV, GPS + ASR, and GPS + ASR + AMV improved the PC values by 82%, 88%, and 96% when correlated to AWS observations.
From the average of the quantitative verification of all cases (
Table 3), the lowest RMSE and BIAS error were achieved by GPS + ASR + AMV, followed by the GPS + ASR RQV, and CTRL experiments. The values of the reduction percentages of the RMSE and BIAS error in GPS + ASR + AMV reached 31% and 80% compared to CTRL. On a categorical quantitative score, GPS + ASR + AMV performed the best, with AC and CSI increases of 10% and 16%, respectively. The PC also established that GPS + ASR + AMV was the most correlated to the AWS by approximately 71%.
To further investigate the impact of the assimilation experiments on rainfall forecasts, the ETS was calculated using the simulation forecast fields and the AWS observations as the function of the rainfall threshold per hour (mm) (
Figure 13). Four rainfall thresholds, light rain (0.1 ≤ R ≤ 3), moderate rain (3 ≤ R ≤ 15), heavy rain (15 ≤ R ≤ 30), and very heavy rain (R ≥ 30), were used. The ETSs of the four cases were averaged. Compared to CTRL, RQV, GPS + ASR, and GPS + ASR + AMV improved the ETS by 38%, 50%, and 59% for the light rain, respectively. For moderate rain, GPS + ASR + AMV showed the highest accuracy with a 62% improvement in the ETS compared to that of CTRL; however, RQV and GPS + ASR only produced improvements of 28% and 44%, respectively. RQV, GPS + ASR, and GPS + ASR + AMV increased the heavy rain ETS by approximately 28%, 63%, and 53%, respectively. For the very heavy rain threshold, the ETS showed a small value because the occurrence of very heavy rainfall was rare. The enhancement by the assimilation experiments was also small, and RQV, GPS + ASR, and GPS + ASR + AMV produced similar 23% increases in the ETS compared to that of CTRL. Overall, it can be inferred that the improvement in experiment assimilations primarily corresponded to light and moderate rain, with GPS + ASR + AMV showing the best improvement.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}