
Adaptive Kalman Filter for Real-Time Precise Orbit Determination of Low Earth Orbit Satellites Based on Pseudorange and Epoch-Differenced Carrier-Phase Measurements


Abstract
:1. Introduction
2. Methods
2.1. Preprocessing of Pseudorange and Carrier-Phase Measurements
2.2. Adaptive Kalman Filter Based on Pseudorange and Epoch-Differenced Carrier-Phase Measurements
2.2.1. Observation Model
2.2.2. Dynamic Model
3. Materials
3.1. Data
3.2. Processing Strategy
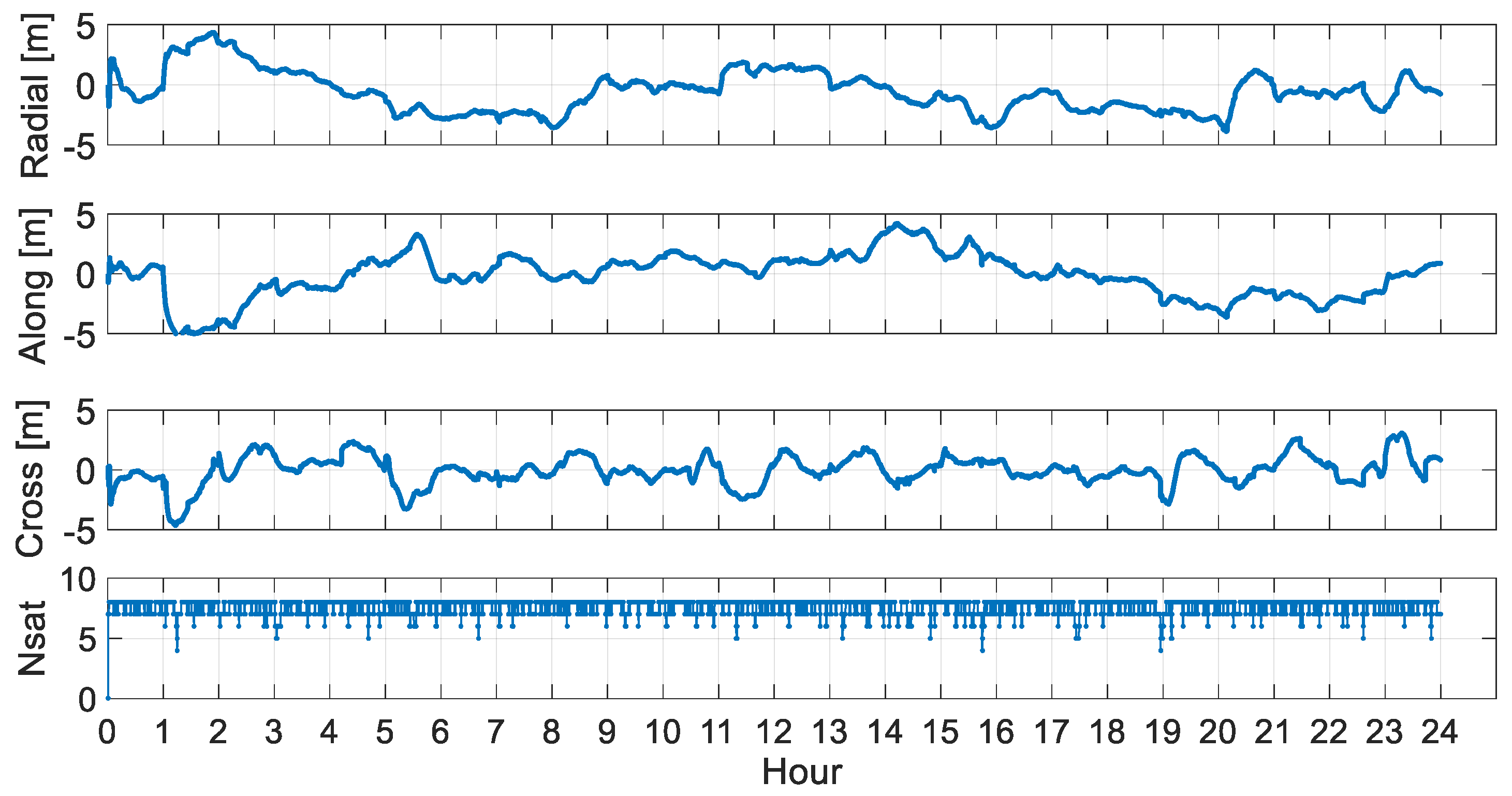
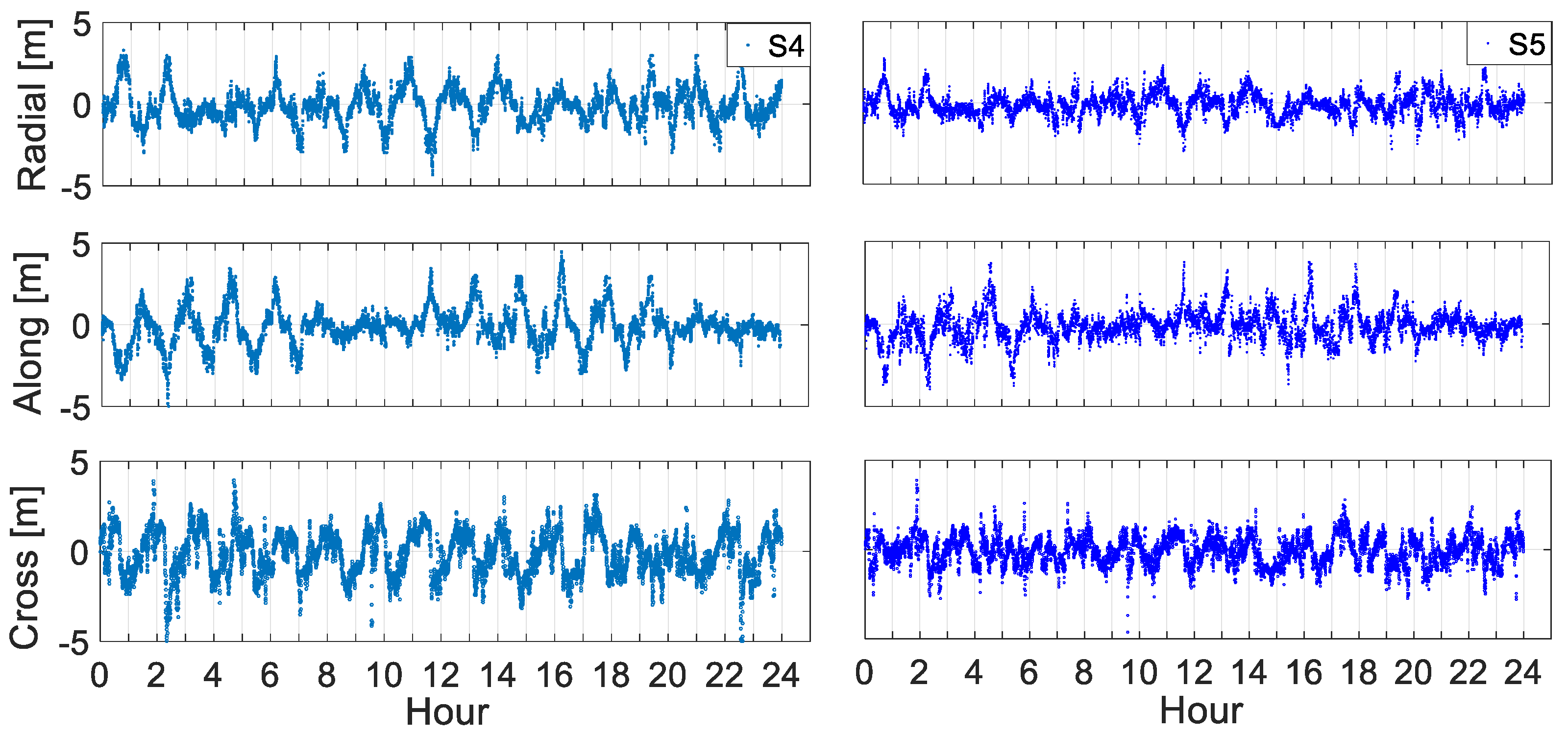
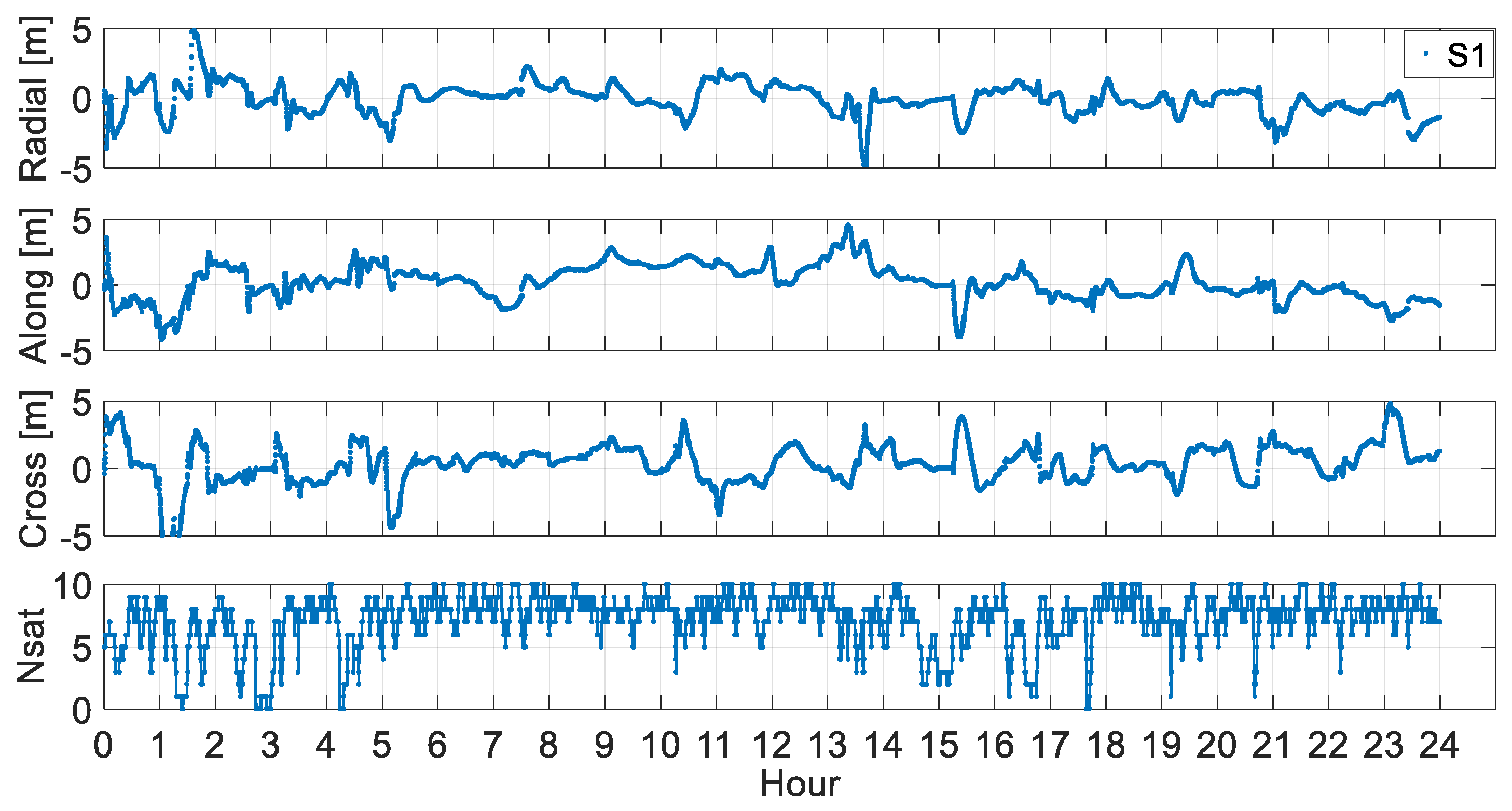
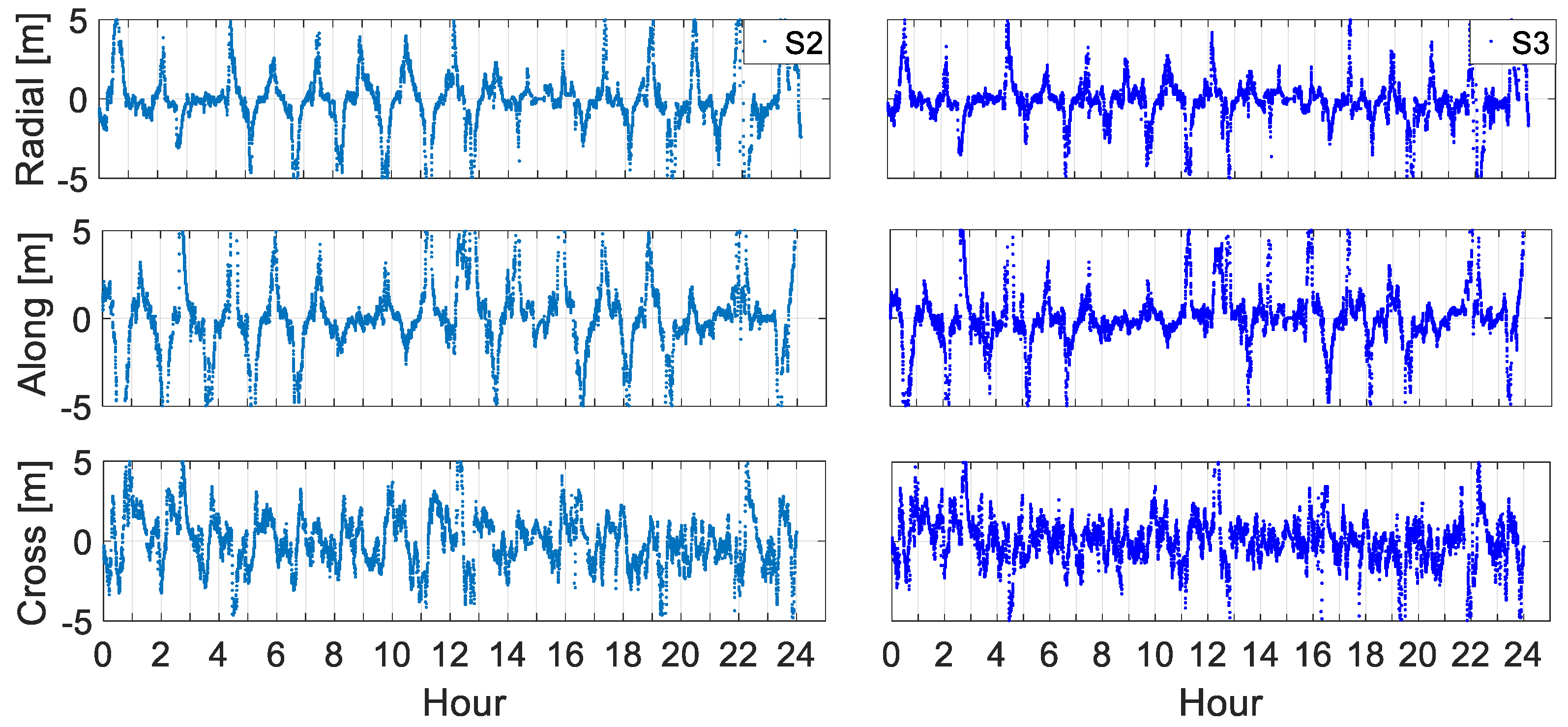
4. Results and Analysis
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Reigber, C.; Luhr, H.; Schwintzer, P.; Wickert, J. Earth Observation with CHAMP: Results from Three Years in Orbit; Springer: Berlin, Germany, 2005. [Google Scholar]
- Massmann, F.-H.; Beerer, J.; Tapley, B.; Reigber, C. GRACE Mission Status and Future Plans, (Geophysical Research Abstracts, Vol. 9, 07022, 2007). In Proceedings of the General Assembly European Geosciences Union (EGU), Vienna, Austria, 15–20 April 2007. [Google Scholar]
- Kornfeld, R.P.; Arnold, B.W.; Gross, M.A.; Dahya, N.T.; Klipstein, W.M.; Gath, P.; Bettadpur, S. GRACE-FO: The Gravity Recovery and Climate Experiment Follow-On Mission. J. Spacecr. Rockets 2019, 56, 931–951. [Google Scholar] [CrossRef]
- Garcia, E.S.; Sandwell, D.T.; Smith, W. Retracking CryoSat-2, Envisat and Jason-1 radar altimetry waveforms for improved gravity field recovery. Geophys. J. Int. 2014, 196, 2. [Google Scholar] [CrossRef] [Green Version]
- Hwang, C.; Tseng, T.P.; Lin, T. Precise orbit determination for the FORMOSAT-3/COSMIC satellite mission using GPS. J. Geod. 2009, 83, 477–489. [Google Scholar] [CrossRef]
- Olsen, N.; Eigil, F.C.; Rune, F. The Swarm Satellite Constellation Application and Research Facility (SCARF) and Swarm data products. Earth Planets Space 2013, 65, 1189–1200. [Google Scholar] [CrossRef]
- Yuan, Y.; Mi, X.; Zhang, B. Initial assessment of single-and dual-frequency BDS-3 RTK positioning. Satell. Navig. 2020, 1, 7. [Google Scholar] [CrossRef]
- Bock, H.; Jäggi, A.; Meyer, U.; Visser, P.; Ijssel, J.; Helleputte, T.V.; Markus, H.; Hugentobler, U. GPS-derived orbits for the GOCE satellite. J. Geod. 2011, 85, 807–818. [Google Scholar] [CrossRef] [Green Version]
- Kang, Z.; Tapley, B.; Bettadpur, S.; Ries, J.; Nagel, P.; Pastor, R. Precise orbit determination for the GRACE mission using only GPS data. J. Geod. 2006, 80, 322–331. [Google Scholar] [CrossRef]
- Montenbruck, O.; Hackel, S.; Jaggi, A. Precise orbit determination of the Sentinel-3A altimetry satellite using ambiguity-fixed GPS carrier phase observations. J. Geod. 2018, 92, 711–726. [Google Scholar] [CrossRef] [Green Version]
- Montenbruck, O.; Hackel, S.; van den Ijssel, J.; Arnold, D. Reduced dynamic and kinematic precise orbit determination for the Swarm mission from 4 years of GPS tracking. GPS Solut. 2018, 22, 79. [Google Scholar] [CrossRef]
- Yoon, Y.T.; Eineder, M.; Yague-Martinez, N.; Montenbruck, O. TerraSAR-X precise trajectory estimation and quality assessment. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1859–1868. [Google Scholar] [CrossRef]
- Li, M.; Li, W.; Shi, C.; Jiang, K.; Guo, X.; Dai, X.; Meng, X.; Yang, Z.; Yang, G. Precise orbit determination of the Fengyun-3C satellite using onboard GPS and BDS observations. J. Geod. 2017, 91, 1313–1327. [Google Scholar] [CrossRef] [Green Version]
- Montenbruck, O.; Ramos-Bosch, P. Precision real-time navigation of LEO satellites using global positioning system measurements. GPS Solut. 2008, 12, 187–198. [Google Scholar] [CrossRef]
- Yang, Y.X.; Mao, Y.; Sun, B.J. Basic performance and future developments of BeiDou global navigation satellite system. Satell. Navig. 2020, 1, 1. [Google Scholar] [CrossRef] [Green Version]
- Haas, L.; Pittelkau, M. Real-time high accuracy GPS onboard orbit determination for use on remote sensing satellites. In Proceedings of the ION GPS 99, Institute of Navigation, Nashville, TN, USA, 14–17 September 1999; pp. 829–836. [Google Scholar]
- Loiselet, M.; Stricker, N.; Menard, Y.; Luntama, J.P. GRAS—MetOp’s GPS-based atmospheric sounder. ESA Bull. 2000, 102, 38–44. [Google Scholar]
- Williams, J.; Lightsey, E.G.; Yoon, S.P.; Schutz, R.E. Testing of the ICESat BlackJack GPS receiver engineering model. In Proceedings of the ION-GPS-2002, Portland, OR, USA, 24–27 September 2002. [Google Scholar]
- Feng, Y. An alternative orbit integration algorithm for GPS based precise LEO autonomous navigation. GPS Solut. 2001, 5, 1–11. [Google Scholar] [CrossRef]
- Chen, J.P.; Wang, J.X. Kinematic precise orbit determination of low earth orbiter based on epoch-difference strategy. J. Geod. Geodyn. 2007, 27, 57–61. [Google Scholar]
- Zhang, K.; Li, X.; Xiong, C.; Meng, X.; Li, X.; Yuan, Y.; Zhang, X. The Influence of Geomagnetic Storm of 7 September 2017 on the Swarm Precise Orbit Determination. J. Geophys. Res. Space Phys. 2019, 124, 6971–6984. [Google Scholar] [CrossRef]
- Montenbruck, O.; Kroes, R. In-flight performance analysis of the CHAMP BlackJack GPS Receiver. GPS Solut. 2003, 7, 74–86. [Google Scholar] [CrossRef]
- Tang, J.; Wang, H.; Chen, Q.; Chen, Z.; Zheng, J.; Cheng, H.; Liu, L. A time-efficient implementation of Extended Kalman Filter for sequential orbit determination and a case study for onboard application. Adv. Space Res. 2018, 62, 343–358. [Google Scholar] [CrossRef]
- Salazar, D.; Hernandez-Pajares, M.; Juan-Zornoza, J.M.; Sanz-Subirana, J.; Aragon-Angel, A. EVA: GPS-based extended velocity and acceleration determination. J. Geod. 2011, 85, 329–340. [Google Scholar] [CrossRef] [Green Version]
- Li, M.; Xu, T.; Lu, B.; He, K. Multi-GNSS precise orbit positioning for airborne gravimetry over Antarctica. GPS Solut. 2019, 23, 53. [Google Scholar] [CrossRef]
- Li, M.; Xu, T.; Flechtner, F.; Foerste, C.; Lu, B.; He, K. Improving the Performance of Multi-GNSS (Global Navigation Satellite System) Ambiguity Fixing for Airborne Kinematic Positioning over Antarctica. Remote Sens. 2019, 11, 992. [Google Scholar] [CrossRef] [Green Version]
- Wagner, C.; Mcadoo, D.; Klokocnik, J. Degradation of Geopotential Recovery from Short Repeat-Cycle Orbits: Application to GRACE Monthly Fields. J. Geod. 2006, 80, 94–103. [Google Scholar] [CrossRef]
- Li, M.; Xu, T.; Ge, H.; Guan, M.; Yang, H.; Fang, Z.; Gao, F. LEO-Constellation-Augmented BDS Precise Orbit determination Considering Spaceborne Observational Errors. Remote Sens. 2021, 13, 3189. [Google Scholar] [CrossRef]
- Förste, C.; Bruinsma, S.; Shako, R.; Marty, J.C.; Flechtner, F.; Abrykosov, O.; Dahle, C.; Lemoine, J.-M.; Neumayer, K.-H.; Biancale, R. EIGEN-6—A New Combined Global Gravity Field Model Including GOCE Data from the Collaboration of GFZ Potsdam and GRGS Toulouse (Geophysical Research Abstracts Vol.13, EGU2011-3242-2, 2011). In Proceedings of the General Assembly European Geosciences Union, Vienna, Austria, 3–8 April 2011. [Google Scholar]
- Petit, G.; Luzum, B. IERS Conventions 2010; No.36 in IERS Technical Note; Verlag des Bundesamts für Kartographie und Geodäsie: Frankfurt am Main, Germany, 2010. [Google Scholar]
- Lyard, F.; Lefevre, F.; Letellier, T.; Francis, O. Modelling the global ocean tides: Modern insights from FES2004. Ocean Dyn. 2006, 56, 394–415. [Google Scholar] [CrossRef]
- Wang, L.; Chen, R.; Li, D.; Zhang, G.; Shen, X.; Yu, B.; Wu, C.; Xie, S.; Zhang, P.; Li, M.; et al. Initial assessment of the LEO based navigation signal augmentation system from Luojia-1A satellite. Sensors 2018, 18, 3919. [Google Scholar] [CrossRef] [PubMed] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LEO Constellation | Swarm | GRACE |
|---|---|---|
| Satellite | Swarm-A/B/C | GRACE-A/B |
| Altitude | A/C: ~460 km, B: ~510 km | ~500 km |
| Inclination | A/C: 87.35°, B: 87.75° | 89.5° |
| Orbit type | Circular near-polar orbits | Circular near-polar orbits |
| Repeat cycle | 7–10 months | A sparse repeat track of 61 revolutions every 4 days [27] |
| Goal | Geomagnetic observation | Detection of the Earth gravity variations |
| Spaceborne observations | GPS | GPS |
| Sampling interval | 10 s | 10 s |
| Dynamic Model | Setting |
|---|---|
| Earth gravity model | EIGEN-6C (70 × 70) [29] |
| N-body | JPL DE405 |
| Solid tide and pole tide | IERS 2010 [30] |
| Ocean tide | FES 2004 [31] |
| Relatively | IERS 2010 |
| Solar radiation pressure | Macro Model [11] for both Swarm-A and GRACE-A satellites |
| Atmospheric drag | Static Harris–Priester density model, fixed superficial area, estimating the drag parameter every 4 h. |
| Empirical accelerations | First order Gauss–Markov model, piecewise periodical terms in the along, cross and radial components |
| Parameter | Initial Variance | Steady State Variance | Correlation Time |
|---|---|---|---|
| Position (m) | 1.0 | - | - |
| Velocity (m/s) | 1.0 | - | - |
| Receiver clock offset (m) | 500.0 | 50.0 | 30.0 |
| Empirical force acceleration in radial (nm/s2) | 100.0 | 200.0 | 2000.0 |
| Empirical force acceleration in track (nm/s2) | 400.0 | 800.0 | 2000.0 |
| Empirical force acceleration in normal (nm/s2) | 200.0 | 400.0 | 2000.0 |
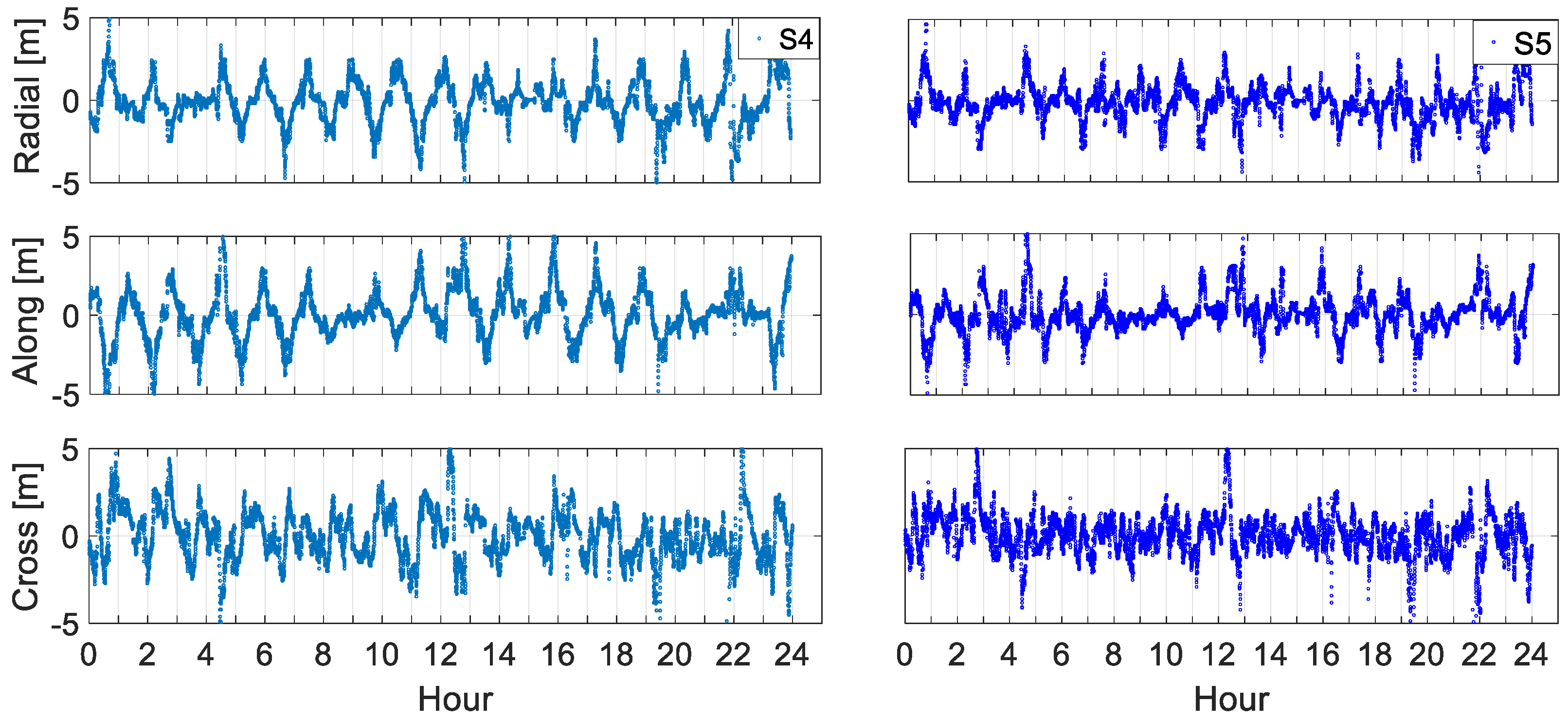
| Scheme | S1 | S2 | S3 | S4 | S5 | |
|---|---|---|---|---|---|---|
| Swarm-A | Radial | 1.09 | 1.38 | 1.11 | 1.08 | 0.70 |
| Along | 1.23 | 1.58 | 1.39 | 1.17 | 0.88 | |
| Cross | 0.97 | 1.45 | 1.18 | 1.22 | 0.78 | |
| Scheme | S1 | S2 | S3 | S4 | S5 | |
| Swarm-A | Radial | 1.21 | 1.61 | 1.30 | 1.22 | 0.91 |
| Along | 1.45 | 1.92 | 1.82 | 1.57 | 1.06 | |
| Cross | 1.04 | 1.71 | 1.39 | 1.40 | 0.86 | |
| GRACE-A | Radial | 2.25 | 2.86 | 2.11 | 1.94 | 1.35 |
| Along | 2.29 | 3.14 | 2.41 | 2.46 | 1.75 | |
| Cross | 2.36 | 2.80 | 2.21 | 2.01 | 1.47 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M.; Xu, T.; Shi, Y.; Wei, K.; Fei, X.; Wang, D. Adaptive Kalman Filter for Real-Time Precise Orbit Determination of Low Earth Orbit Satellites Based on Pseudorange and Epoch-Differenced Carrier-Phase Measurements. Remote Sens. 2022, 14, 2273. https://doi.org/10.3390/rs14092273
Li M, Xu T, Shi Y, Wei K, Fei X, Wang D. Adaptive Kalman Filter for Real-Time Precise Orbit Determination of Low Earth Orbit Satellites Based on Pseudorange and Epoch-Differenced Carrier-Phase Measurements. Remote Sensing. 2022; 14(9):2273. https://doi.org/10.3390/rs14092273
Chicago/Turabian StyleLi, Min, Tianhe Xu, Yali Shi, Kai Wei, Xianming Fei, and Dixing Wang. 2022. "Adaptive Kalman Filter for Real-Time Precise Orbit Determination of Low Earth Orbit Satellites Based on Pseudorange and Epoch-Differenced Carrier-Phase Measurements" Remote Sensing 14, no. 9: 2273. https://doi.org/10.3390/rs14092273