1. Introduction
Earth observation satellite (EOS) systems can acquire images of the Earth’s surface via their remote sensing instruments. Due to the advantages such as large-scale observation coverage and high observation frequency, EOSs have been widely implemented to monitor and observe disasters such as earthquakes, floods, landslides, and debris flow [
1,
2,
3]. Although the number of EOSs is continuously increasing, there are still several limitations to satisfy all kinds of user requirements. For example, when an earthquake occurs, EOSs are required to take ground images urgently to provide timely support for rescue operations. However, EOSs in their regular orbits may not be able to observe the earthquake area timely or clearly. Thus, an appropriately selected satellite needs to be transferred to a new orbit to provide better coverage properties, which is termed the orbit maneuver optimization problem.
Generally, the orbit maneuver optimization problem can be treated as a kind of orbit design problem [
4,
5,
6]. Numerous studies have been carried out to investigate the orbit design problem. For example, Graham et al. [
7] studied a minimum-time Earth-orbit transfers optimization problem using low-thrust propulsion with eclipsing. They developed an initial guess generation method to construct a useful guess and analyzed the approximate place where the spacecraft enters and exits the Earth’s shadow. A similar problem was addressed by Wang et al. [
8], who adopted a convex optimization method. Zhang et al. [
9] investigated a minimum-fuel optimization problem using low-thrust in the circular restricted three-body scenario. By considering actuation uncertainties, Mohammadi et al. [
10] proposed a robust optimization approach for the impulsive orbit transfers optimization problem. In their study, the genetic algorithm, Monte-Carlo sampling, and surrogate model are combined to balance the optimization accuracy and time. Cheng et al. [
11] developed a real-time optimal control approach based on multiscale deep neural networks for the orbit transfer problem of the solar sail spacecraft. In a recent study, Morante et al. [
12] proposed a multi-objective optimization approach for an orbit-raising optimization problem, in which chemical, electrical, and hybrid trajectories are considered.
However, most of the orbit design problems aim to find an optimal orbit for improving orbit performance (e.g., coverage time and fuel consumption) [
4,
5,
13]. Those studies assume that the satellite flies along a fixed orbit without orbit maneuvers and consider orbit elements as decision variables. For the cases in which orbit maneuvers are considered, there are few existing studies that mainly focus on reconfiguration problems of satellite constellations [
14,
15,
16]. For example, McGrath et al. [
17] presented a satellite constellation reconfiguration problem, in which a restricted low-thrust Lambert rendezvous scenario was included. Soleymani et al. [
18] investigated an optimal mission planning problem of the reconfiguration process of satellite constellations. They applied a combination of particle swarm optimization and genetic algorithm to find the optimal departure and arrival positions of each satellite. He et al. [
19] developed a physical programming method together with a genetic algorithm, to solve a multi-objective satellite constellation reconfiguration problem for disaster monitoring purposes. Wang et al. [
20] proposed a hybrid-resampling particle swarm optimization method for an agile satellite constellation design problem, in which different types of sensors, the attitude maneuver of sensors, and different coverage performance indices are considered. To satisfy the requirements of emergency observation, a recent study proposed by Hu et al. [
21] carried out a multi-objective optimization framework for the satellite constellation optimization problem.
It can be concluded that although many relevant studies have been published, the orbit maneuver optimization problem that optimizes maneuvers of a satellite is still a minor branch of orbit design problems and is rarely investigated. Hence, in this study, we make effort to address the orbit maneuver optimization problem from a scheduling perspective. Specifically, since a satellite can transfer its orbit by conducting an impulsive maneuver at a specific time instance and the maneuver result would affect the orbit performance, it would be crucial to determine the reasonable magnitude and direction of the impulse, as well as the maneuver moment. Different from most of the previous studies that aim to determine the promising position (i.e., orbit elements) of a satellite, our study optimizes the orbit maneuver in terms of velocity increments for an impulsive maneuver and the maneuver moment. Meanwhile, our study considers multiple satellites and the most suitable satellite would be selected to execute the task according to scheduling results.
On the other hand, to improve the service quality, diverse user requirements are being considered in the orbit maneuver optimization in recent years. For instance, since the fuel capacity is limited and the remaining fuel affects the lifetime of a satellite, some users may require a low fuel consumption solution. In case of some emergency tasks that need to be accomplished at all costs, the users may want the satellite to respond to observation requests as quickly as possible. Further, in some rescue operations, the orbit altitude is the optimization objective since an appropriate orbit altitude that can provide higher ground resolution is crucial. Therefore, we build three models that, respectively, optimize three objectives, including response time, ground resolution, and fuel consumption to satisfy diverse user requirements. Meanwhile, since we focus on EOS, specific constraints such as the resolution constraint are included in models.
Since the studied problem considers orbit maneuvers at every second as decision variables, the search space would be very large. Meanwhile, specific constraints of EOS would increase the difficulties of solving the problem. All of the above reasons propose challenges for solving the problem. In this regard, evolutionary algorithms would be a promising solution method owing to their powerful and effective search capabilities. Previously, evolutionary algorithms have been widely employed to address the orbit design problem. The algorithms used mainly include particle swarm optimization [
20,
22,
23], genetic algorithms [
16,
21,
24], and hybrid algorithms [
5,
25]. For example, Shirazi [
25] applied a hybridization of the genetic algorithm and simulated annealing to a multi-objective orbit maneuver optimization problem. Based on the particle swarm optimization (PSO) algorithm, Pontani et al. [
22] solved four kinds of impulsive orbital transfer problems, focusing on the optimization of impulsive transfers between two coplanar and non-coplanar, circular and elliptic orbits, respectively. Yao et al. [
26] investigated the application of an improved DE algorithm on an orbit design problem by adding self-adaption and stochastic mechanisms. To optimize coverage-related metrics, as well as the number and semi-major axes of satellites in multiple constellations, Hitomi et al. [
27] proposed a variable-length chromosome-based evolutionary algorithm.
Particularly, our studied problem can be treated as a continuous optimization problem. As a simple and efficient evolutionary algorithm, especially for continuous optimization, differential evolution (DE) which has rarely been implemented by previous related studies would be a promising candidate for addressing our problem. However, due to the well-known no-free-lunch theorem [
28], the same optimization algorithm with the same configurations may have different performances on different problems. We have three models with different constraints and different optimization objectives, which propose challenges for optimizers. Moreover, DE highly depends on the configuration of genetic strategies and control parameters [
29]. It would be time-consuming to find effective combinations of configurations to obtain high-quality solutions on different optimization models by using the same algorithm. Previously, many techniques have been developed to relieve this issue, such as ensemble and adaption techniques [
28,
30,
31]. In this study, we implement the adaption technique to DE. Specifically, we form the genetic strategies and parameters of DE into a directed acyclic graph, in which each path indicates a combination of the genetic strategies and parameters. As the pheromone trails and property always enable the ant colony to find a reasonable path from the graph, an ant colony optimization (ACO) is adopted to search for effective combinations during the evolution. The hybridization of ACO and DE exhibits the effective search capability of DE that has been proved in previous studies [
4,
26,
32]. Furthermore, it can dynamically optimize the algorithm configurations to improve the adaptive capability of DE, such that higher-quality solutions can be obtained for all three optimization models.
In summary, this paper has the following contributions.
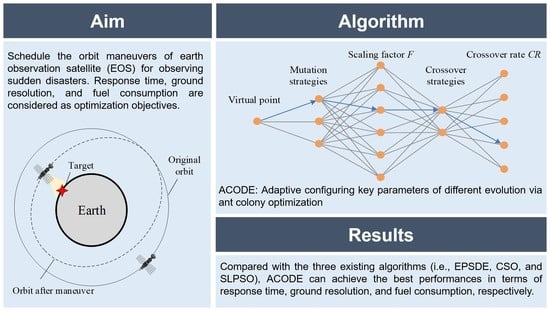
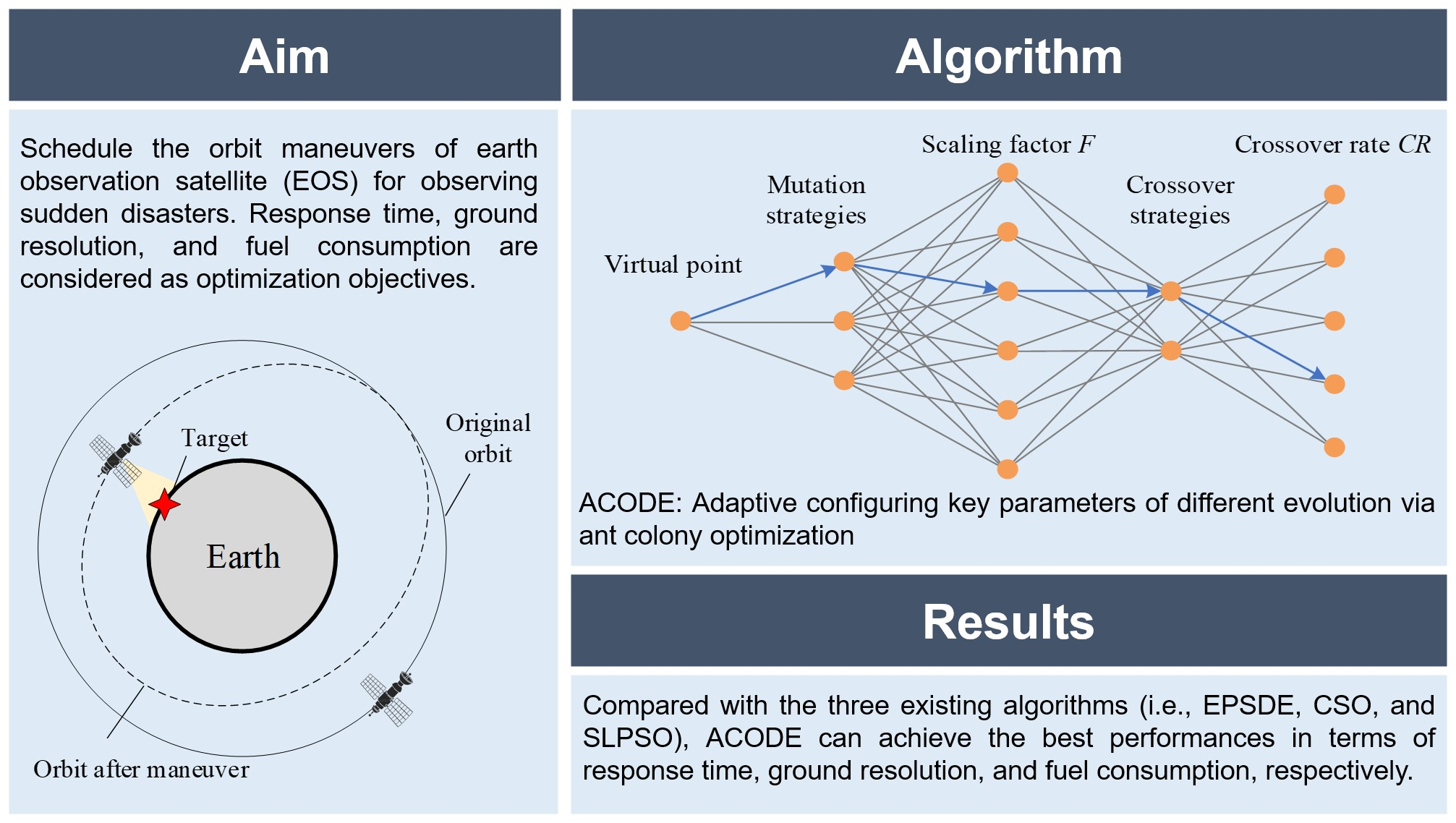
(i) We investigate the orbit maneuver optimization problem considering diverse user requirements. In the problem, a satellite is selected from a set of satellites and transferred to a new orbit based on appropriate maneuvers (i.e., the velocity increment and maneuver moment) to respond to an emergency observation request. By analyzing orbit coverage and dynamics, we build three optimization models that optimize response time, ground resolution, and fuel consumption, respectively, to satisfy different user requirements.
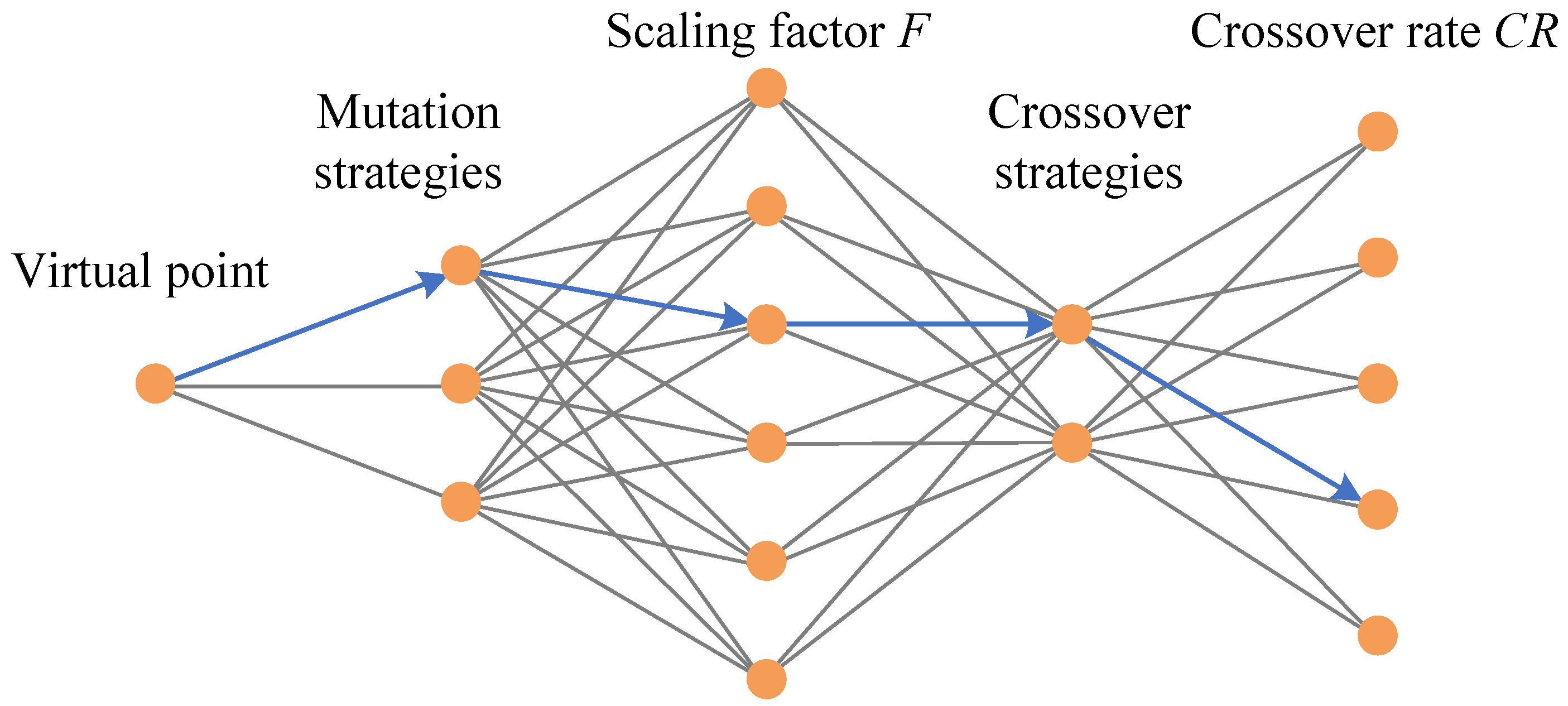
(ii) To solve the proposed optimization models, we implement an adaptive differential evolution based on graph search. In the algorithm, key algorithm components (i.e., crossover strategies, mutation strategies, and control parameters) are formed into a directed acyclic graph and an ACO is adopted to find reasonable combinations of configurations during the evolution. The implemented algorithm is a hybrid of ACO and DE, therefore it is named ACODE.
(iii) We conduct simulation experiments to verify the efficiency of ACODE. The ACODE is compared with three representative algorithms including EPSDE [
33], CSO [
34], and SLPSO [
35] in simulation scenarios where multiple EOSs are requested to observe a ground target. The simulation results show the superiority of ACODE.
This paper is organized as follows.
Section 2 details the orbit coverage and dynamics analysis, as well as three optimization models.
Section 3 and
Section 4 introduce the solution method and simulation experiments, respectively. Finally, the conclusions are remarked by
Section 5.
2. Problem Description
In this section, we elaborate on the orbit maneuver optimization problem based on orbit coverage and dynamics calculations, followed by three optimization models with different optimization objectives (i.e., response time, fuel consumption, and ground resolution). As a part of the satellite system design, orbit maneuver optimization is associated with many complicated environmental factors. Therefore, some reasonable assumptions are adopted to simplify the problem.
(i) There are some perturbations (e.g., atmospheric drag, solar radiation pressure, and third body effects) that have negative impacts on the operation of the satellite. We only consider
perturbation of Earth oblateness in the model, which is a common assumption in existing studies on orbit design problems [
6,
32,
36].
(ii) Assume that the sensor equipped on each satellite is visible to the ground target when the satellite flies in the sunshine and the sunshine time is from 6:00 to 18:00 local time. Further, the other factors that may affect the imaging such as clouds and weather conditions, as well as the altitude of ground targets are assumed to be negligible.
(iii) Each satellite is assumed to be independent. Therefore, the orbit maneuver of a satellite does not affect the flying of another satellite.
(iv) The time required by the satellite to process task information and start the rocket engine is assumed to be negligible.
(v) The ground target is assumed to be a point target. Hence, the ground target can be imaged by the satellite once the satellite passes over it.
Main notations used in this section are displayed in
Table 1.
2.1. Orbit Coverage Analysis
The visibility between a satellite and a ground target depends on many factors, such as the location of the ground target (i.e., longitude and latitude), the orbit elements, and the field of view (FOV) of the satellite. To conduct the orbit coverage analysis, we assume that the Earth is a round body, the orbit is approximately circular, and the FOV on the ground is rectangular as in [
32,
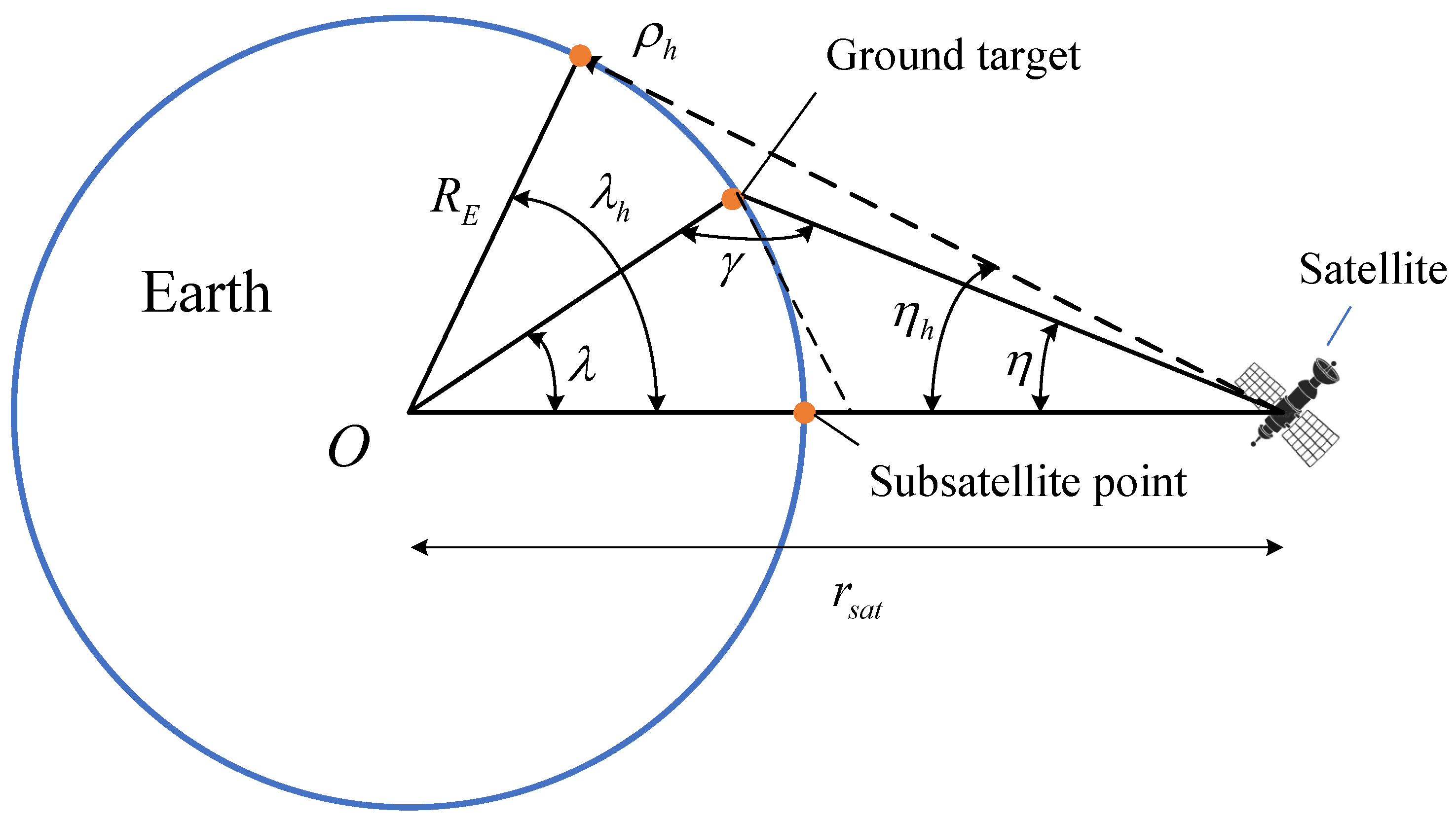
37]. The ground target is visible to the satellite when it lies in the FOV, which can be determined by calculating the longitudes and latitudes of four vertices. A typical satellite coverage on the Earth is shown in
Figure 1.
As
Figure 1 shows, the Earth’s angular radius
defines the half-ground range that may visible to the satellite, which can be expressed by
where
is the Earth’s radius, and
is the distance between the Earth’s center and the satellite. The slant range to the horizon,
, can be written as
However, in practical applications, due to some limitations such as the imaging angle of the sensor and sunshine conditions, the actual half ground range would be smaller than
. Hence, a general expression for the slant range to any point,
, can be expressed by [
38]
where
is the intermediate angle and
is the boresight angle of the satellite (i.e., half of the sensor angle). Afterward, the half-ground range from the subsatellite point can be calculated by
For the satellite equipped with a scanning sensor, the geometry of the FOV is no longer symmetrical about the subsatellite point, requiring more processing to obtain the ground range angle. Given the center boresight angle
of the satellite, the maximum and minimum ground-range angles from the subsatellite point can be obtained. Specifically, the maximum and minimum boresight angles can be written as [
38]
Then, the maximum and minimum Earth’s angular radiuses (i.e.,
and
) can be obtained according to Equations (
5)–(
7). Since the sensor of the satellite can be rotated on multiple axes, in this study we assume that the sensor half-angle equals
and the Earth’s angular radius equals
for convenience. Define the latitude and longitude of the subsatellite point as
, the latitudes and longitudes of the four vertices of the FOV can be calculated by
,
,
, and
, respectively.
According to the latitude and longitude information of the FOV, the latitude and longitude information of the ground target, the positions of the satellite at each moment, as well as the right ascension of Greenwich at the initial moment, we can obtain the key orbit performance indices of a satellite [
39], such as the response time [
32,
40]. The response time is defined as the time required from when a request is received to observe a ground target until the satellite can observe it. The method that assesses whether the target lies in the FOV at moment
t, as well as the response time
can be found in [
32]. Moreover, the calculation method of the latitude and longitude of the subsatellite point at each moment is introduced in the next section.
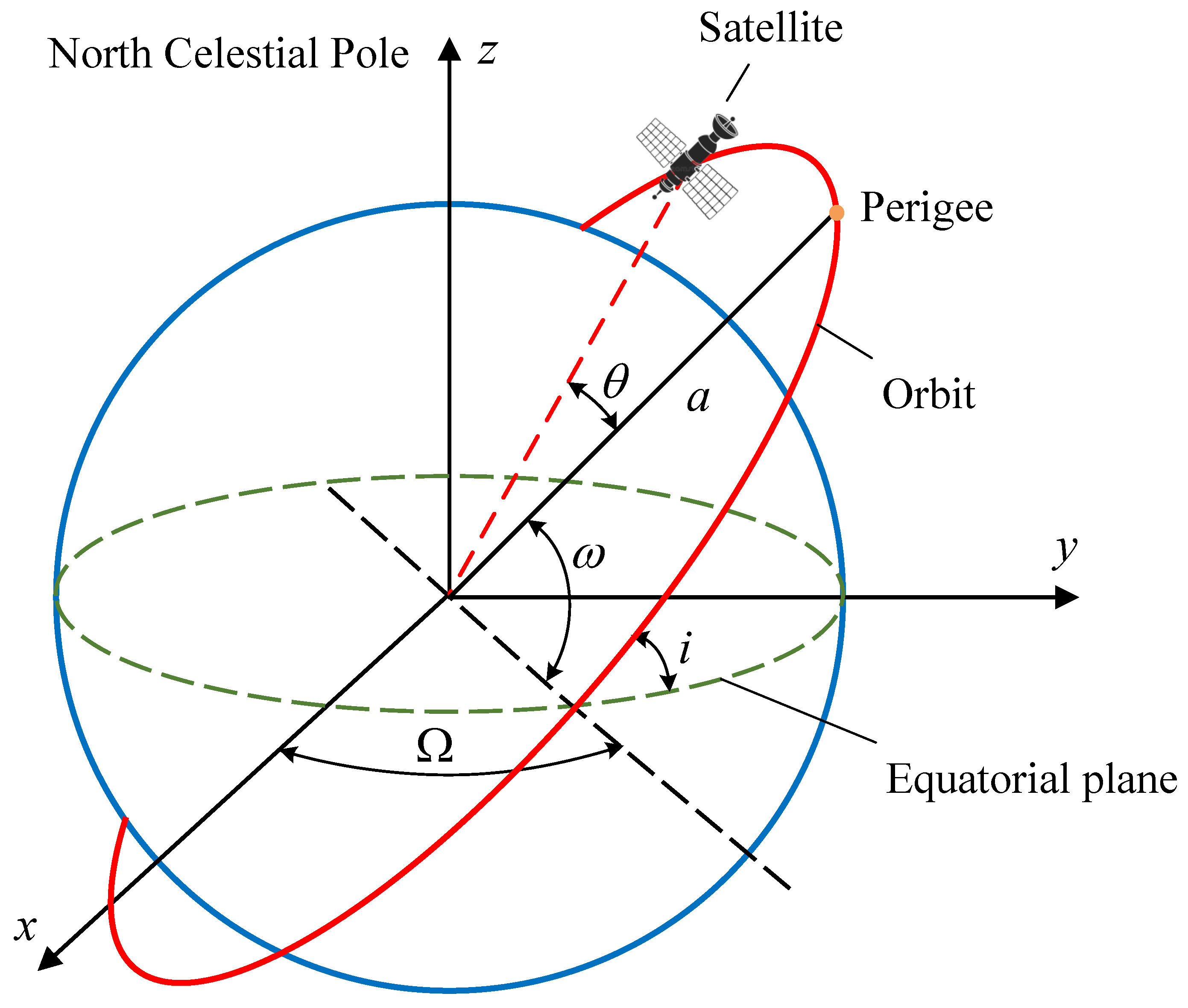
2.2. Orbit Dynamics Model
The position of a satellite in its orbit can be obtained by using six orbit elements, including semimajor axis
a, eccentricity
e, inclination
i, longitude of ascending node
, argument of perigee
, and true anomaly
, as
Figure 2 shows. By using the orbit elements, we can calculate the position of the satellite, as well as the latitude and longitude of each subsatellite point at each moment. In this section, we briefly introduce the calculation methods, and more detailed derivation steps can be found in [
41].
Given a satellite flying around the Earth, it is well-known that the period
P for an orbit of the satellite is calculated by
where
is the Earth’s gravitational parameter. Then, the time
since perigee at the initial epoch can be calculated as
where
M is the initial mean anomaly. According to Kepler’s equation,
M can be calculated by
where
E is the eccentric anomaly, which yields the relation with true anomaly
as
Given a time change
, the longitude of ascending node
, argument of perigee
at the moment
can be expressed by
where
and
are time variations of
and
, which are determined by
perturbation of Earth oblateness. The expressions of
and
are written as
where
. The orbit elements are updated by repeating Equations (
9)–(
13) at each moment
t. Meanwhile, the newly found true anomaly
at the moment
t can be used to calculate the state vector of the satellite in the perifocal coordinate coordinate system (PQW). The satellite position vector
and velocity vector
in the PQW frame can be expressed by
where
h is the angular momentum of the satellite, yielding a relation with the semimajor axis
a as below
Particularly, the position vectors
can be transformed to the Earth-centered inertial (ECI) frame through the transformation matrix
(
and
) written as
by
where
is the satellite position in the ECI frame. Meanwhile,
can be expressed in the Rotating Earth-fixed frame by [
4]
which can be written in vector notation
Define a notation
, the latitude and longitude of the subsatellite point can be calculated by
Based on the above equations, the position of the satellite, as well as the latitude and longitude of each subsatellite point at each moment can be obtained.
Furthermore, in this study, the orbit maneuver focuses on how to move a satellite in the same plane, which can be treated as a co-orbital rendezvous problem [
42]. In the co-orbital rendezvous problem, two satellites are assumed to be located in the same orbit and one satellite maneuvers its orbit by two-impulse Hohmann transfer to catch up with the other one. Therefore, a velocity increment
at the moment
is considered to calculate the orbit elements before and after maneuvering based on orbit equations.
2.3. Formulation of the Optimization Problem
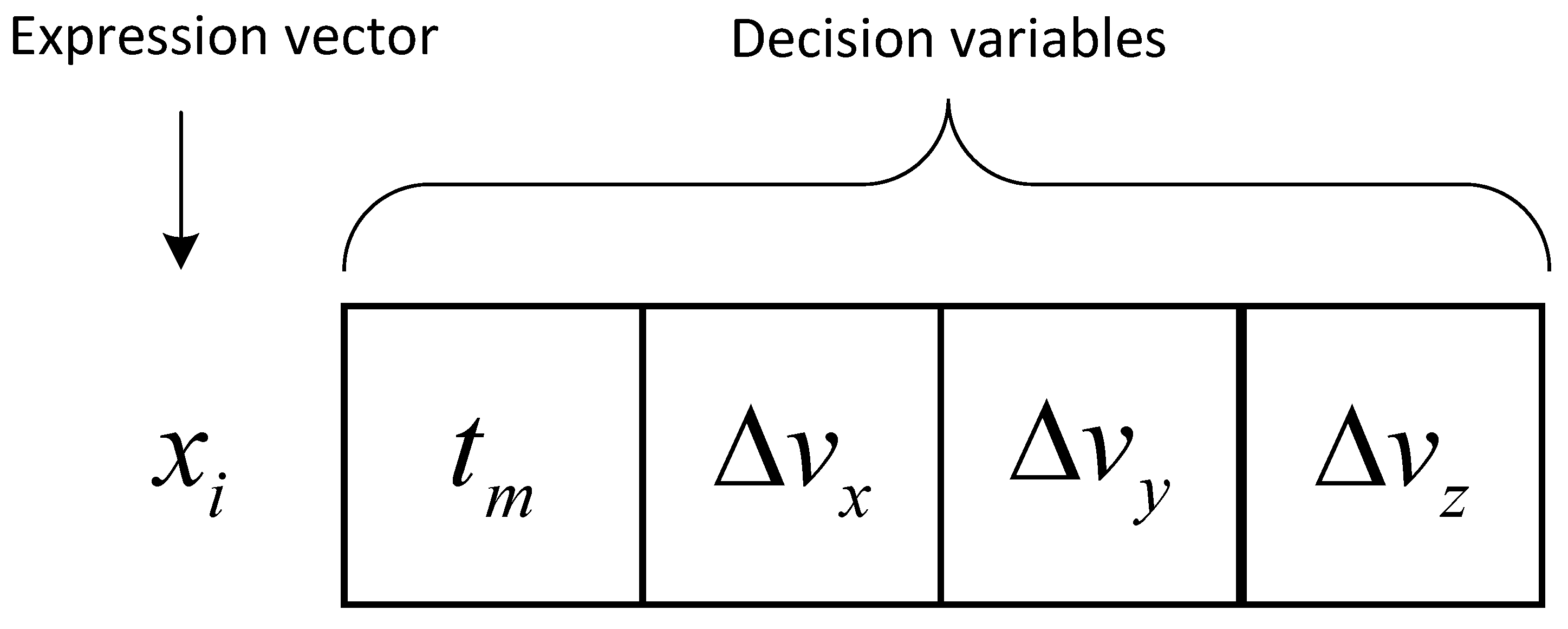
As mentioned above, the optimization problem aims to find appropriate velocity increment
and maneuver moment
to obtain a reasonable scheduling scheme for transferring the satellite. Hence,
and
can be considered as decision variables of the optimization problem, and they are constrained by
Since
is associated with the capacity of fuel, which is the key parameter of the satellite remained lifetime, constraint (
25) ensures that the velocity increment is limited to a reasonable range. Here
represents the maximum allowed velocity increment and the negative value indicates the velocity in the reverse direction. Constraint (
26) defines the range of a feasible maneuver moment (when the satellite starts its rocket engine). Furthermore, there are other constraints introduced in the following.
To obtain sufficient information from a single observation result, constraint (
27) guarantees that the ground resolution is smaller than the required resolution, in which the ground resolution is associated with the satellite altitude over the ground target divided by the horizontal number of pixels. When the satellite is transferring its orbit, the change of orbit altitude should be limited to a reasonable range to ensure the stable operation of the satellite. As the satellite altitude is typically between 250 and 1300 km [
43], constraint (
28) is carried out to limit the satellite altitude after maneuvering. Constraint (
29) is used to ensure that the observation moment lies in the sunshine time window. Furthermore, as timeliness is crucial for emergency observation tasks, we use constraint (
30) to limit the maximum response time of the satellite.
In practical applications, users require different solutions depending upon the purpose. To satisfy diverse user requirements, we build three models considering response time, ground resolution, and fuel consumption as objectives, respectively, which are written as
The calculation processes of objectives are as follows. During the optimization process, appropriate decision variables (i.e., velocity vector increment
and maneuver moment
) will be searched by the algorithm under the constraints mentioned in Equations (
31)–(
33). Since the satellite conducts an impulsive maneuver whose direction and magnitude are determined by
at moment
to transfer its orbit, the new state velocity vector at moment
can be determined by decision variables. Then, the state velocity vector of the satellite can be transformed into the position vector represented by orbit elements by using Equations (
19) and (
20). As the satellite flies around the Earth, the position vector of the satellite changes with time. The changes in position vector can be tracked by Kepler’s equation coupled with orbit equations mentioned in Equations (
8)–(
18). Meanwhile, according to the position vector, the subsatellite point at the same moment can be obtained by Equations (
21)–(
24). The FOV of the satellite is determined by the subsatellite point at the same moment according to Equations (
1)–(
7) introduced in the orbit coverage analysis. When a FOV covers the target point, it indicates that the satellite can observe this target point. Thus, the first objective
is calculated by the difference between the maneuver time
and the time instance when the satellite can observe the target. In the second objective
, the satellite altitude is the distance between the satellite and the subsatellite point when the satellite can observe the target. As to the third objective
, it is determined by the decision variable
directly.
5. Conclusions
In this paper, we investigate the orbital maneuver optimization problem of Earth observation satellites oriented to emergency tasks. Based on the analysis of orbit coverage and dynamics, we propose three kinds of optimization models that aim to, respectively, optimize response time, ground resolution, and fuel consumption, to satisfy diverse user requirements. Meanwhile, we implement an adaptive differential evolution algorithm based on graph search to solve the proposed optimization problems, which is named ACODE. The main feature of ACODE is to form the key components of DE into a directed acyclic graph and adopt an ACO method to search for combinations of these components from the graph, thereby adaptively configuring reasonable components for DE. The key components considered in this paper include mutation strategies, crossover strategies, as well as their corresponding control parameters, both of which can affect the performance of DE.
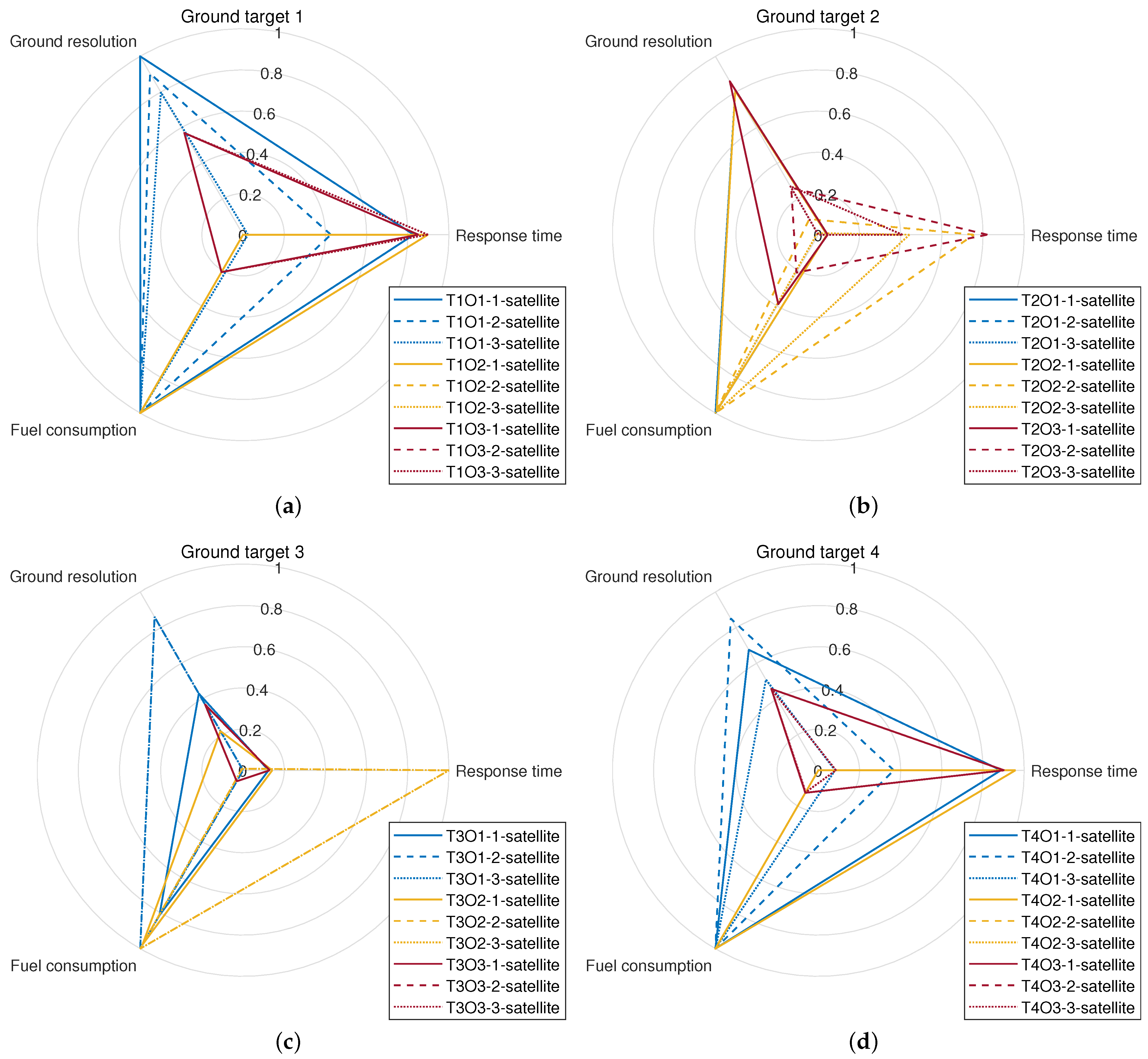
Finally, computational experiments are conducted to verify the proposed three optimization models and ACODE. The simulation results show that all simulation scenarios that consider different optimization objectives can be well-addressed by ACODE. Comparison experiments are also carried out to demonstrate the superiority of ACODE on the proposed problem. The comparison results indicate that ACODE is superior to three well-known algorithms (i.e., EPSDE, CSO, and SLPSO). Further, we find that insufficient satellite resources would affect the efficiency of the orbital maneuver scheme and algorithm.
In future studies, we would like to investigate the multi-objective optimization algorithm that can optimize the three optimization objectives simultaneously for better decision making operations.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}