
A Method for Digital Terrain Reconstruction Using Longitudinal Control Lines and Sparse Measured Cross Sections

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
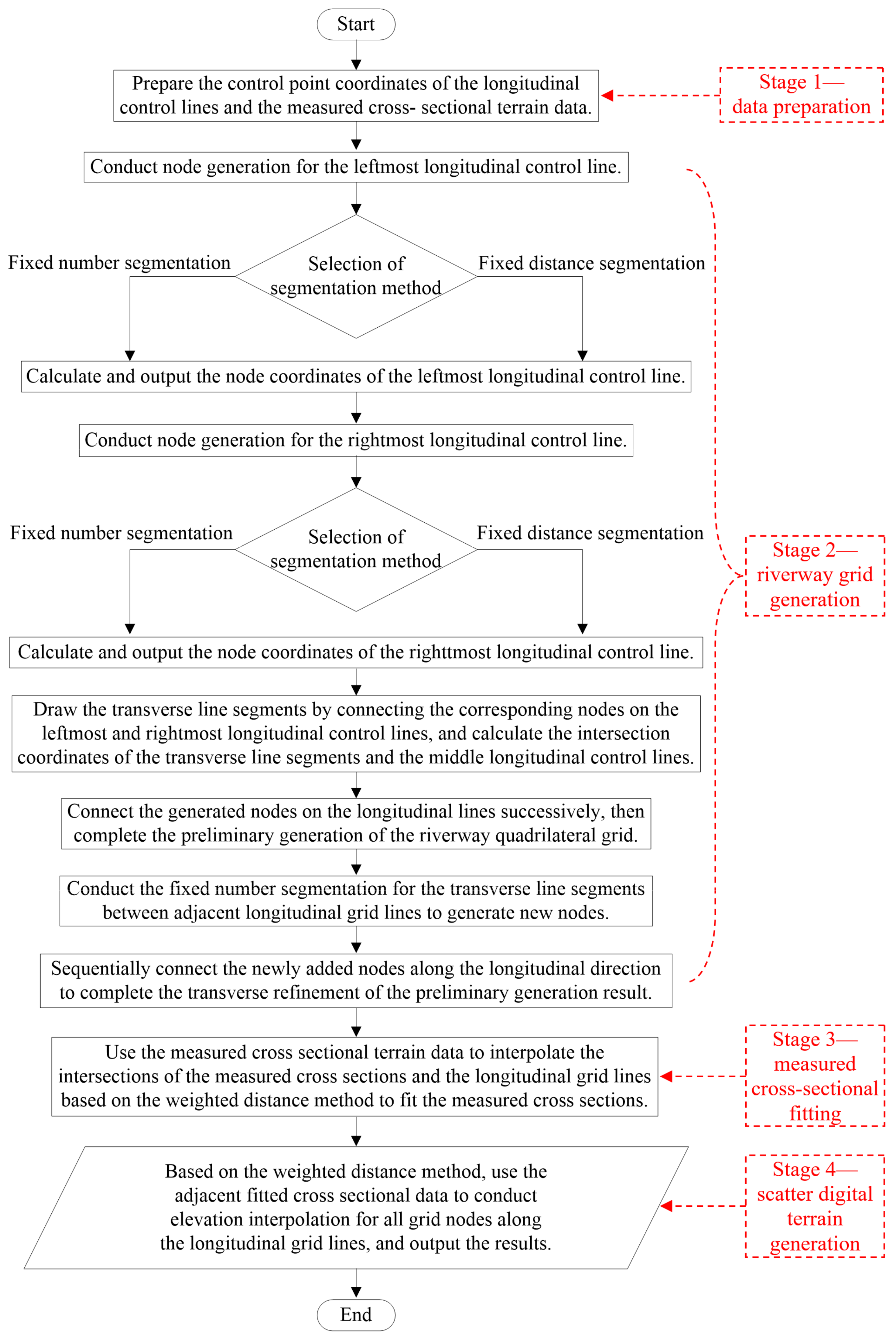
2. Digital Terrain Reconstruction Method
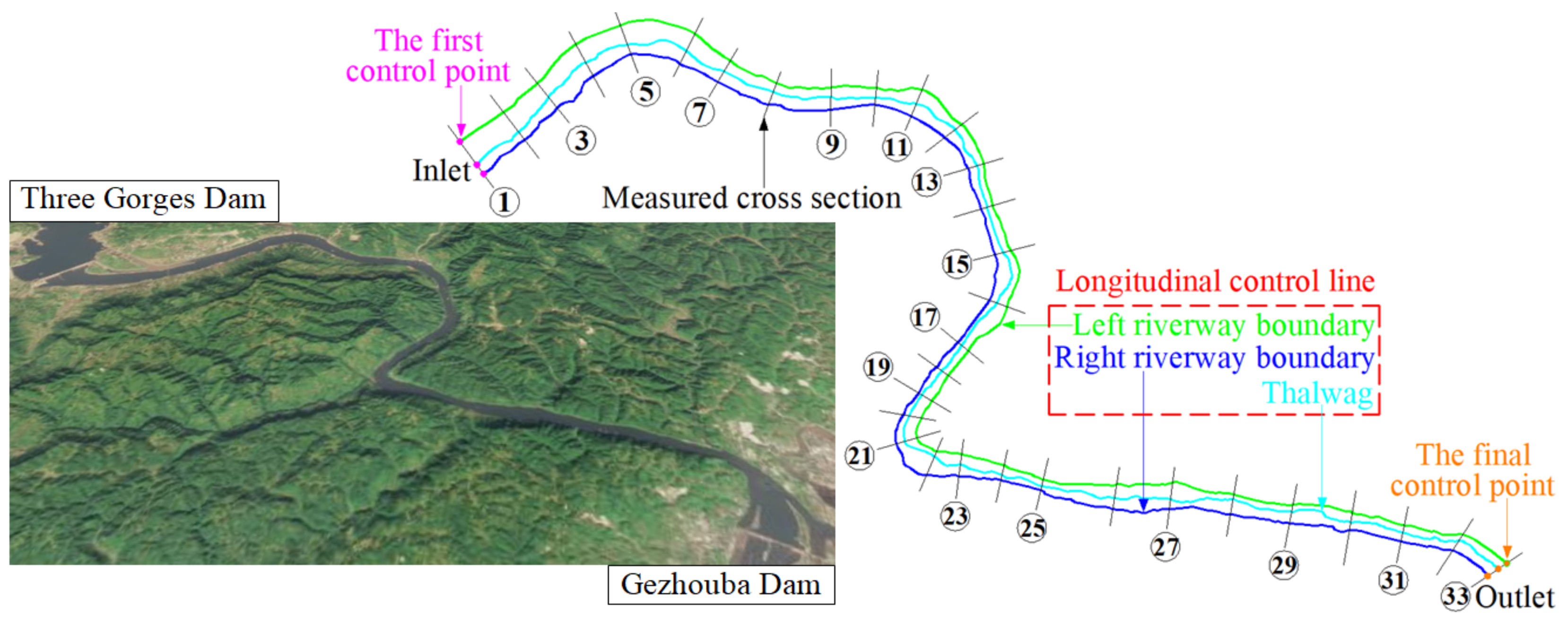
2.1. Data Preparation
2.2. Riverway Grid Generation
2.2.1. Cumulative Distance Calculation for the Riverway Boundary Control Points
2.2.2. Node Generation for the Left Riverway Boundary
2.2.3. Node Generation for the Right Riverway Boundary
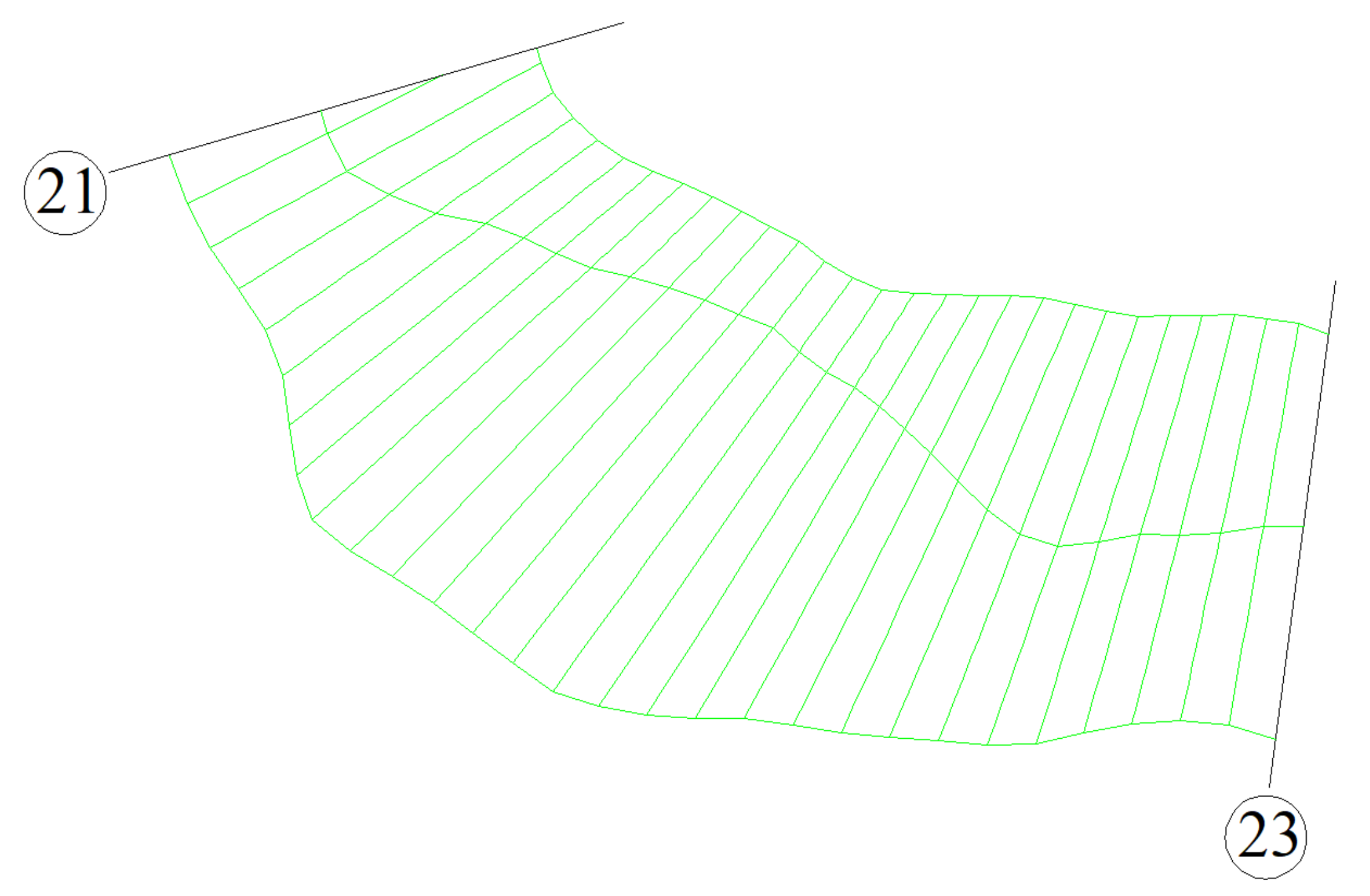
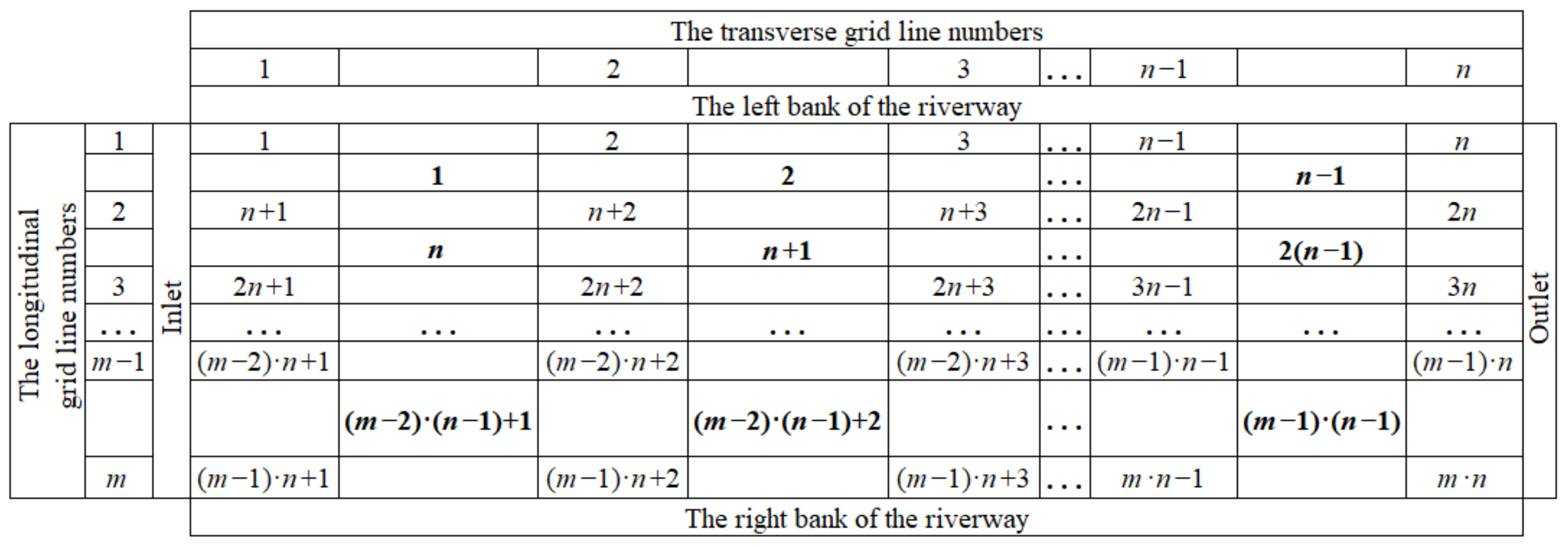
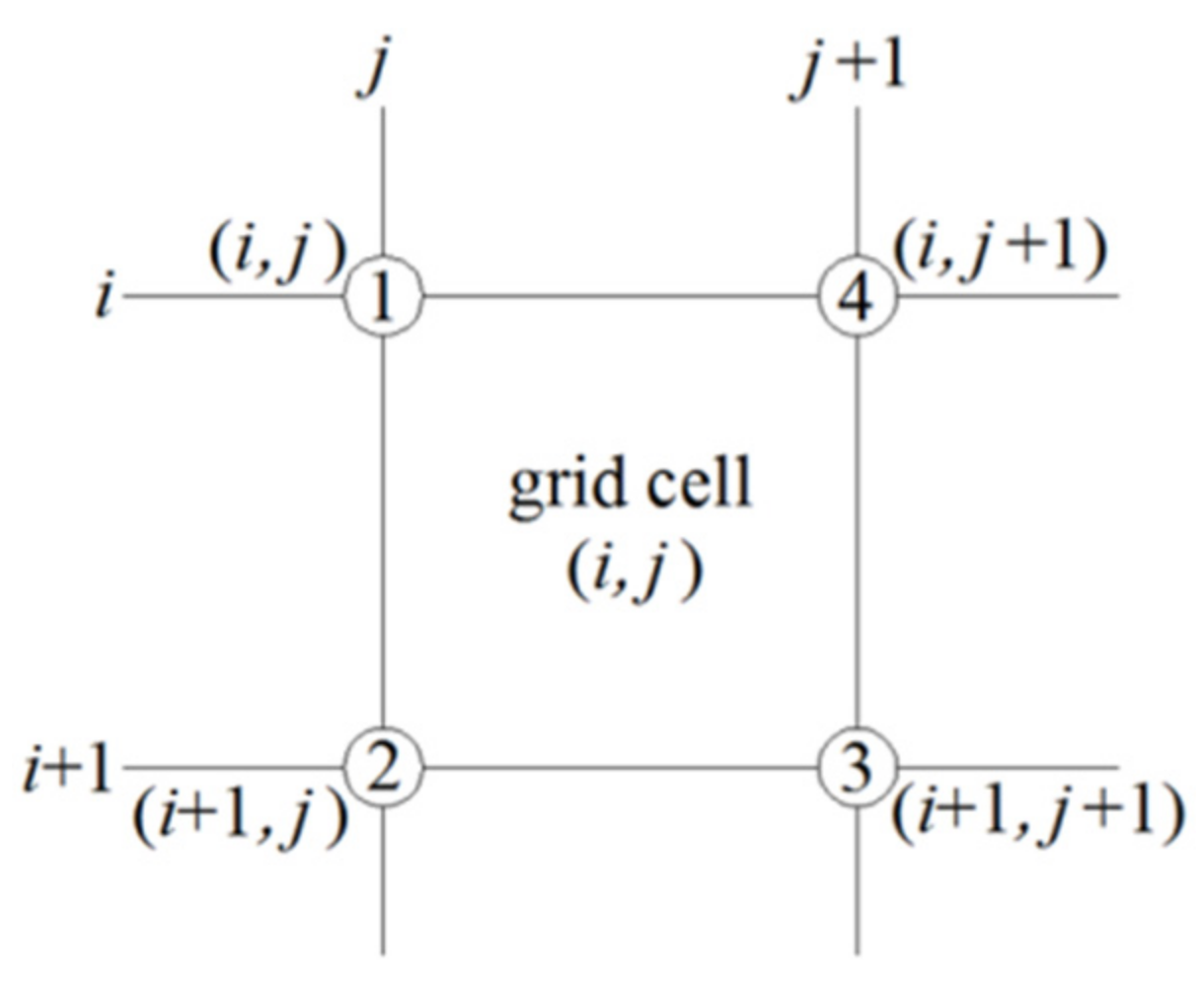
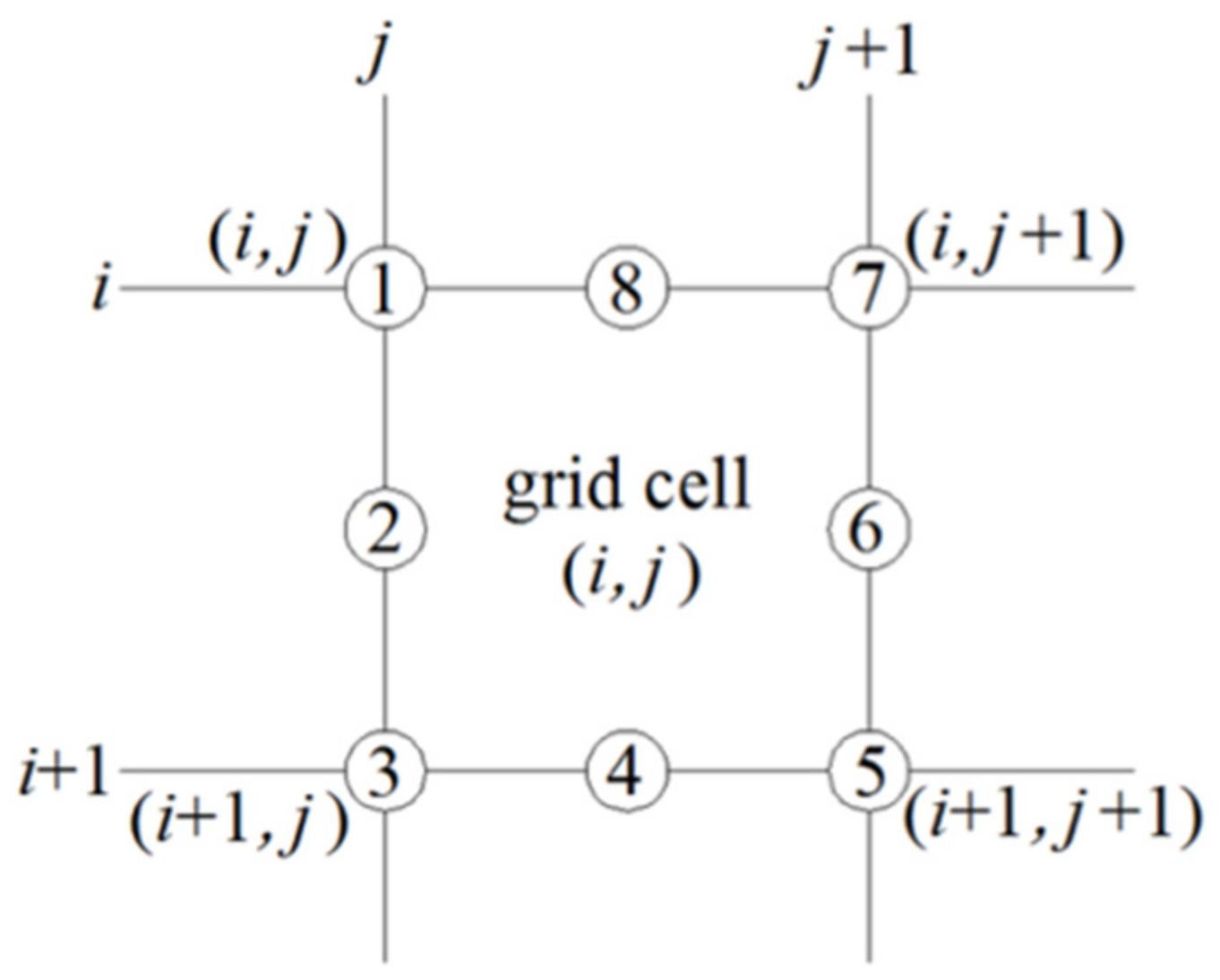
2.2.4. Preliminary Grid Generation
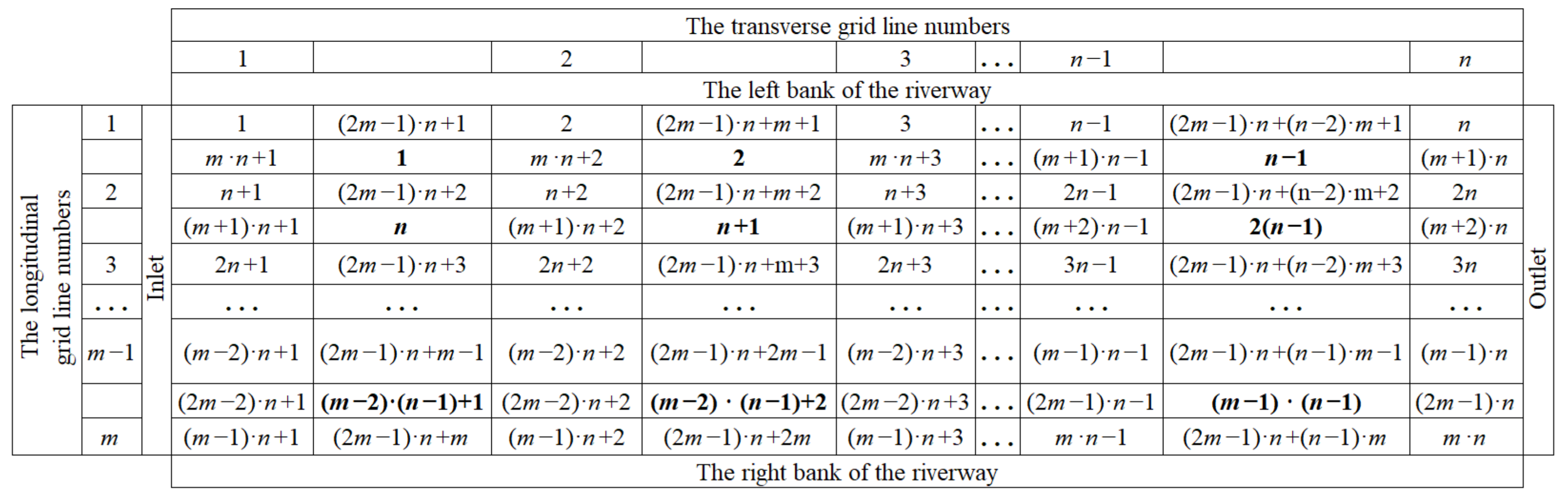
2.2.5. Transverse Refinement for the Preliminary Grids
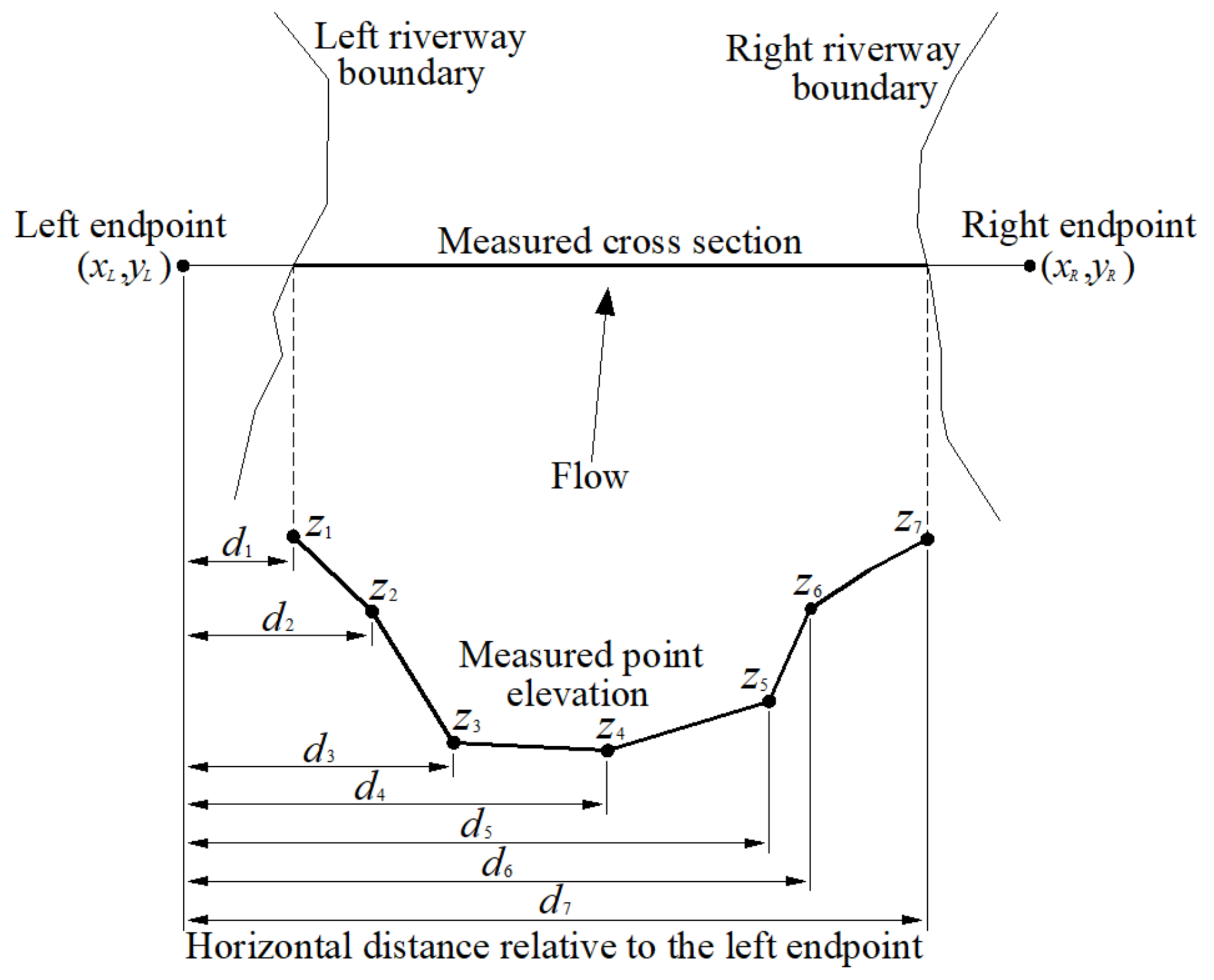
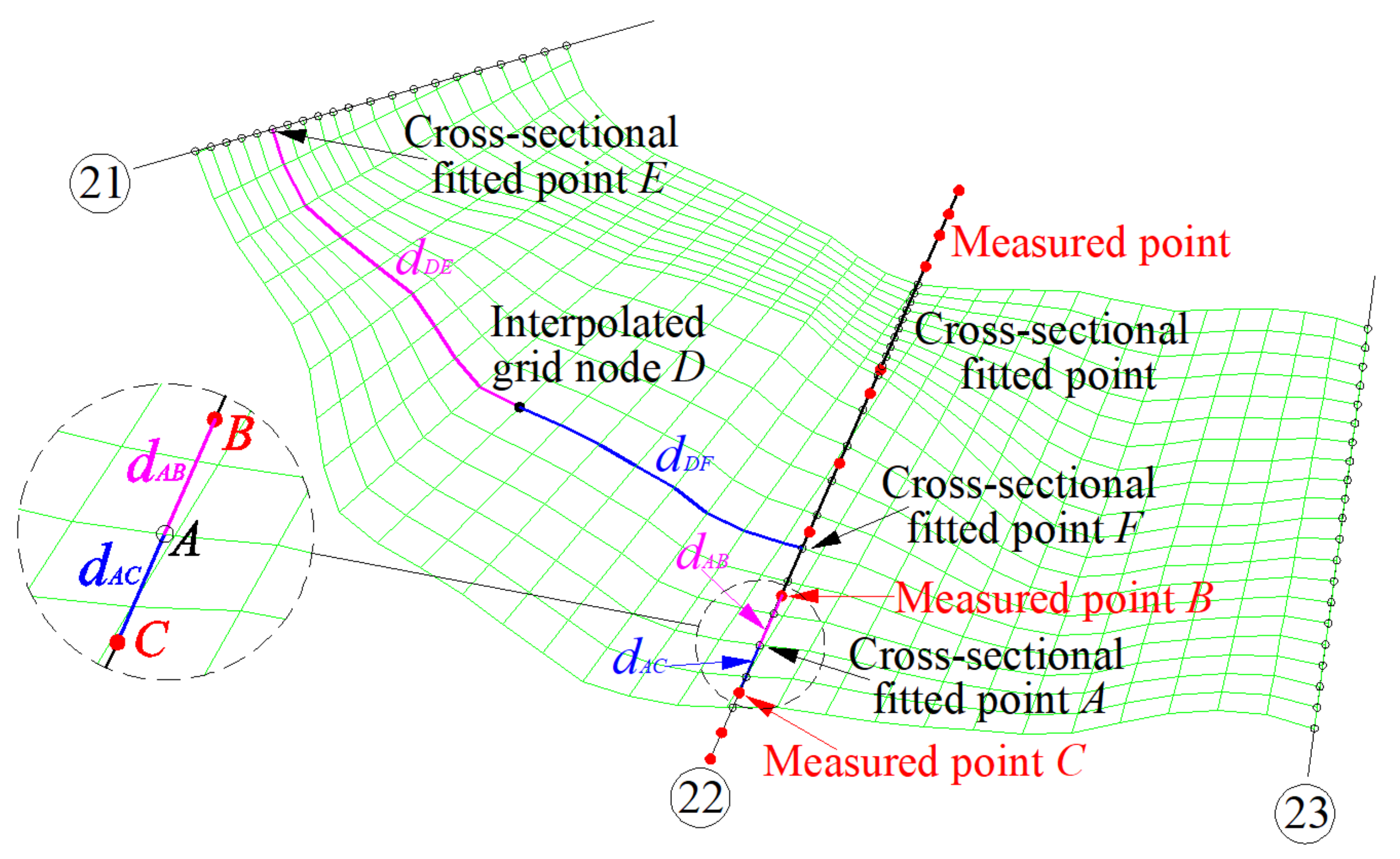
2.3. Measured Cross-Sectional Fitting
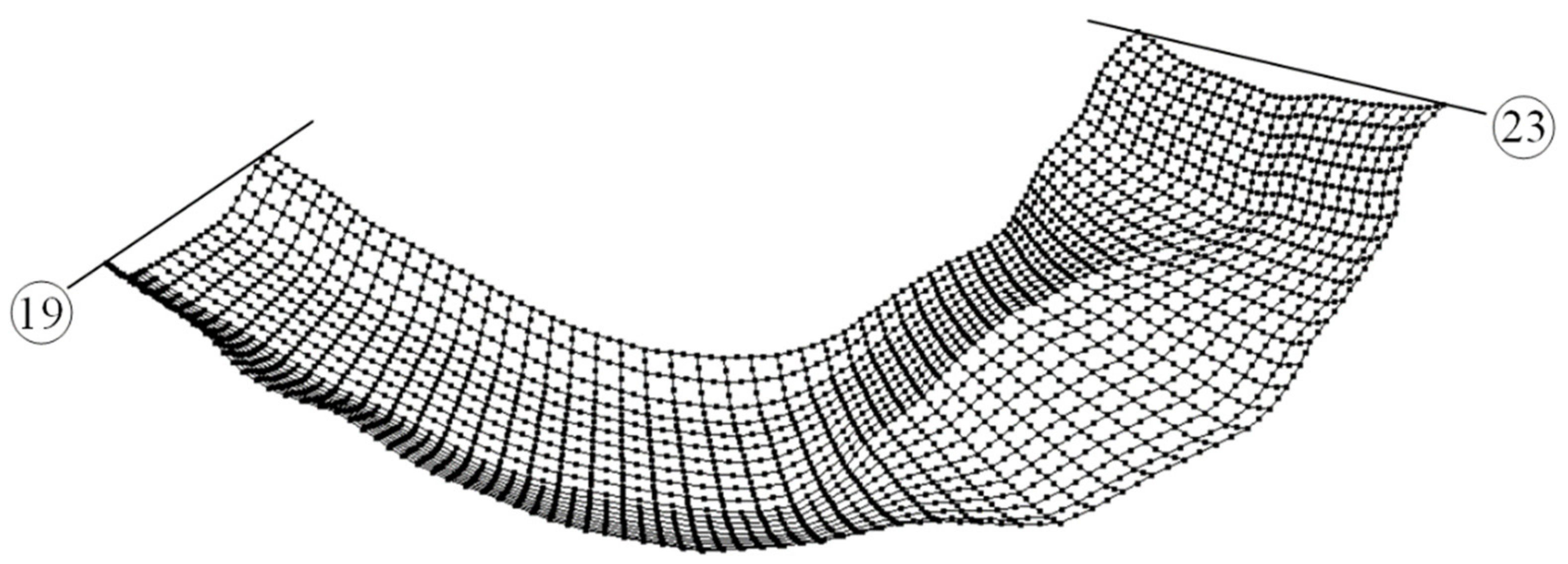
2.4. Scatter Digital Terrain Generation
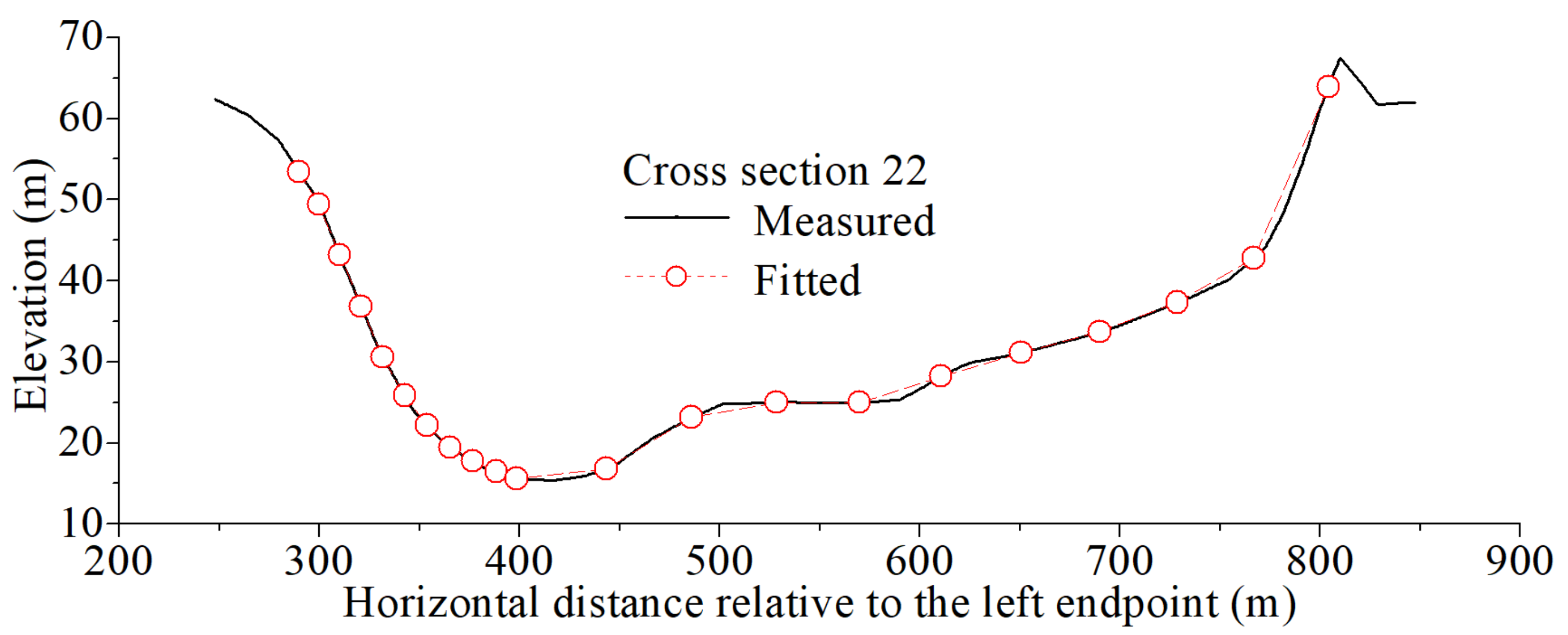
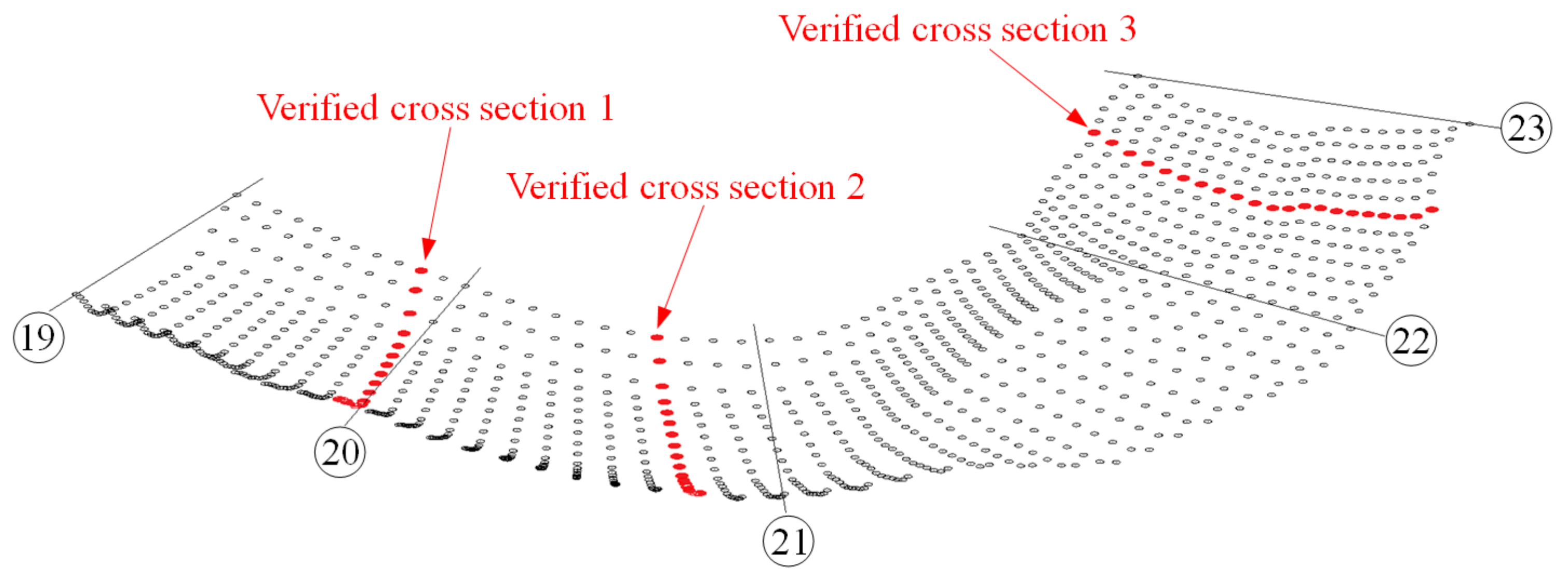
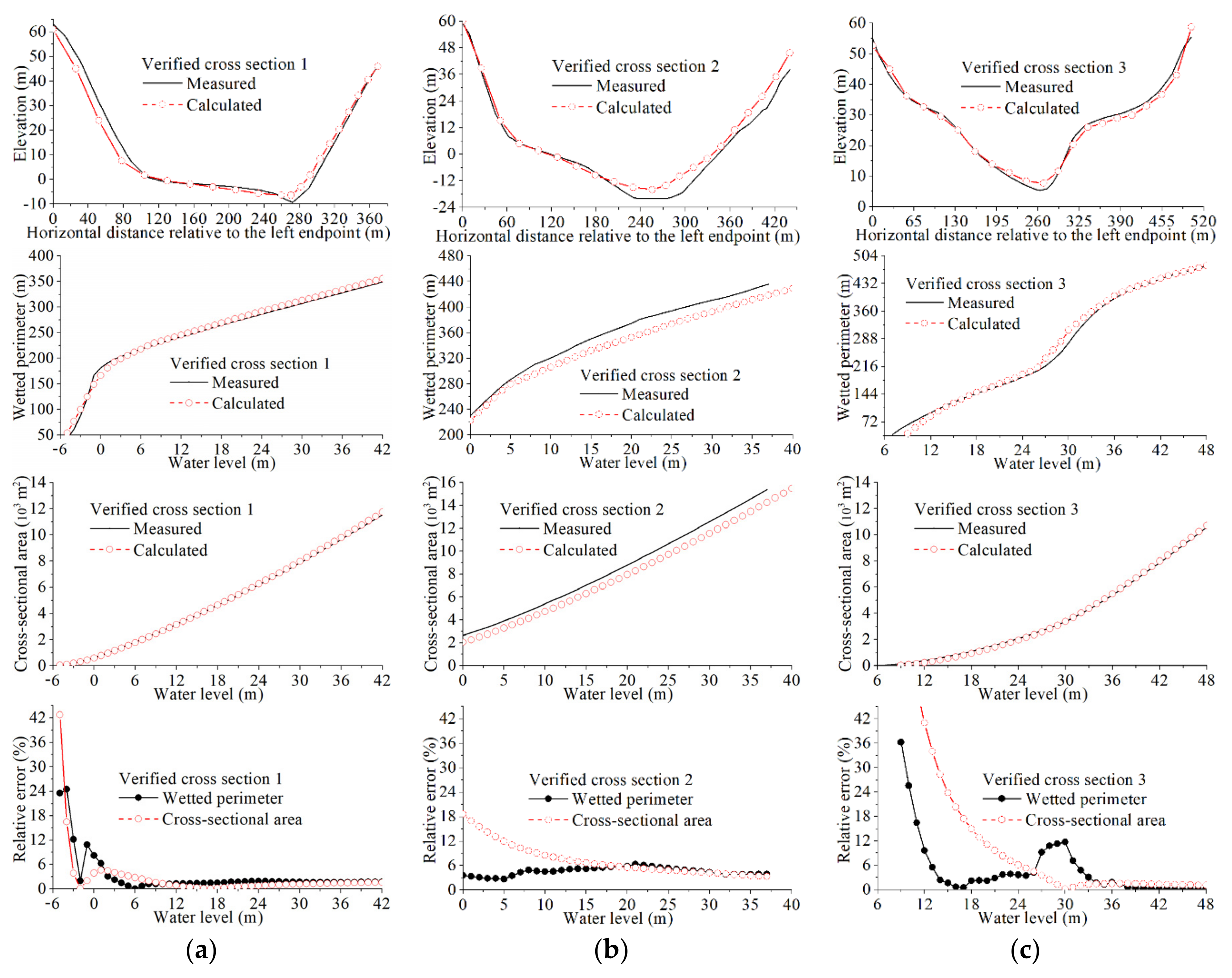
3. Comparisons between the Measured and Calculated Results
4. Digital Terrain Applications
4.1. Meshing Digital Terrain for MIKE21
4.2. Meshing Digital Terrain for SMS
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bates, P.D.; Marks, K.J.; Horritt, M.S. Optimal use of high-resolution topographic data in flood inundation models. Hydrol. Process. 2003, 17, 537–557. [Google Scholar] [CrossRef]
- Horritt, M.S.; Bates, P.D.; Mattinson, M.J. Effects of mesh resolution and topographic representation in 2D finite volume models of shallow water fluvial flow. J. Hydrol. 2006, 329, 306–314. [Google Scholar] [CrossRef]
- Brasington, J.; Vericat, D.; Rychkov, I. Modeling river bed morphology, roughness, and surface sedimentology using high resolution terrestrial laser scanning. Water Resour. Res. 2012, 48, 1–18. [Google Scholar] [CrossRef] [Green Version]
- Castellarin, A.; Baldassarre, G.D.; Bates, P.D.; Brath, A. Optimal cross-sectional spacing in preissmann scheme 1D hydrodynamic models. J. Hydraul. Eng. 2009, 135, 96–105. [Google Scholar] [CrossRef]
- Lin, W.C.; Chen, S.Y.; Chen, C.T. A new surface interpolation technique for reconstructing 3D objects from serial cross-sections. Comput. Vis. Graph. Image Process. 1989, 48, 124–143. [Google Scholar] [CrossRef]
- Hardy, R.L. Theory and Applications of the Multiquadric-biharmonic Method 20 Years of Discovery 1968–1988. Comput. Math. Appl. 1990, 19, 163–208. [Google Scholar] [CrossRef] [Green Version]
- Beatson, R.K.; Cherrie, J.B.; Mouat, C.T. Fast fitting of radial basis functions: Methods based on preconditioned GMRES iteration. Adv. Comput. Math. 1999, 11, 253–270. [Google Scholar] [CrossRef]
- Carr, J.C.; Beatson, P.K.; Cherrie, J.B.; Mitchell, T.J.; Fright, W.R.; Mccallum, B.C.; Evans, T.R. Reconstruction and representation of 3D objects with radial basis functions. In Proceedings of the 28th Annual Conference on Computer Graphics and Interactive Techniques, New York, NY, USA, 28 July–1 August 2001. [Google Scholar]
- Zheng, H.; Song, L.; Hou, Y.; Hou, Y. The partition of unity parallel finite element algorithm. Adv. Comput. Math. 2015, 41, 937–951. [Google Scholar] [CrossRef]
- Yokota, R.; Barba, L.A.; Knepley, M.G. PetRBF-A Parallel O(N) algorithm for radial basis function interpolation with gaussians. Comput. Methods Appl. Mech. Eng. 2010, 199, 1793–1804. [Google Scholar] [CrossRef] [Green Version]
- Yang, M.; Liang, G.T.; Lai, R.X.; Yu, X. Theory and application of digital topography generation based on curved surface interpolation. J. Hydraul. Eng. 2007, 38, 221–225. (In Chinese) [Google Scholar]
- Wagner, B.; Gartner, H.; Santini, S.; Ingensand, H. Cross-sectional interpolation of annual rings within a 3D root model. Dendrochronologia 2011, 29, 201–210. [Google Scholar] [CrossRef]
- Caviedes-Voullieme, D.; Morales-Hernandez, M.; Lopez-Marijuan, I.; Garcia-Navarro, P. Reconstruction of 2D river beds by appropriate interpolation of 1D cross-sectional information for flood simulation. Environ. Model. Softw. 2014, 61, 206–228. [Google Scholar] [CrossRef]
- Lebrenz, H.; Bardossy, A. Geostatistical interpolation by quantile kriging. Hydrol. Earth Syst. Sci. 2018, 23, 1633–1648. [Google Scholar] [CrossRef] [Green Version]
- Weber, D.; Englund, E. Evaluation and comparison of spatial interpolators. Math. Geol. 1992, 24, 381–391. [Google Scholar] [CrossRef]
- Kraus, K. Visulization of the quality of surface and their derivatives. Photogramm. Eng. Remote Sens. 1994, 60, 457–463. [Google Scholar]
- Zimmerma, D.; Pavlik, C.; Ruggles, A.; Armstrong, M.P. An experimental comparison of ordinary and universal kriging and inverse distance weighting. Math. Geol. 1999, 31, 375–390. [Google Scholar] [CrossRef]
- Gichamo, T.Z.; Popescu, I.; Jonoski, A.; Solomatine, D. River cross-section extraction from the ASTER global DEM for flood modeling. Environ. Model. Softw. 2012, 31, 37–46. [Google Scholar] [CrossRef]
- Andes, L.C.; Cox, A.L. Rectilinear inverse distance weighting methodology for bathymetric cross-section interpolation along the mississippi river. J. Hydrol. Eng. 2017, 22, 04017014. [Google Scholar] [CrossRef]
- Aguilar, F.J.; Agüera, F.; Aguilar, M.A.; Carvajal, F. Effects of terrain morphology, sampling density and interpolation methods on grid DEM accuracy. Photogramm. Eng. Remote Sens. 2005, 71, 805–816. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Crowded, R.; Falconer, R.A. Use of measured and interpolated cross-sections in hydraulic river modeling. Hydraul. Eng. Softw. 1998, 19, 3–12. [Google Scholar]
- Florinsky, I.V.; Eilers, R.G.; Manning, G.R.; Fuller, L.G. Prediction of soil properties by digital terrain modeling. Environ. Model. Softw. 2002, 17, 295–311. [Google Scholar] [CrossRef]
- Sun, Z.Q.; Gu, S.; Wang, H.J.; Yang, Z.S.; Bi, N.S. A method for the calculation of erosion and accumulation in the river channel using bathymetric data of river cross section: Based on orthogonal-curvilinear-grid DEM. Period. Ocean Univ. China 2018, 48, 90–99. (In Chinese) [Google Scholar]
- Harada, S.; Li, S.S. Combining remote sensing with physical flow laws to estimate river channel geometry. River Res. Appl. 2018, 34, 697–708. [Google Scholar] [CrossRef]
- Dubey, A.K.; Gupta, P.; Dutta, S.; Kumar, B. Evaluation of satellite-altimetry-derived river stage variation for the braided Brahmaputra River. Int. J. Remote Sens. 2014, 35, 7815–7827. [Google Scholar] [CrossRef]
- Saur, R.; Rathore, V.S. Flashy river channel migration and its impact in the Jiadhal river basin of Eastern Himalaya, Assam, India: A long term assessment (1928–2010). J. Earth Syst. Sci. 2022, 131, 50. [Google Scholar] [CrossRef]
- Khondoker, M.; Siddiquee, M.; Islam, M.A. The challenges of river bathymetry survey using space borne remote sensing in bangladesh. Atmos. Ocean. Sci. 2016, 1, 7–13. [Google Scholar]
- Niroumand-Jadidi, M.; Vitti, A.; Lyzenga, D.R. Multiple optimal depth predictors analysis (MODPA) for river bathymetry: Findings from spectroradiometry, simulations, and satellite imagery. Remote Sens. Environ. 2018, 218, 132–147. [Google Scholar] [CrossRef]
- Mandlburger, G.; Kolle, M.; Nubel, H.; Soergel, U. Bathynet: A deep neural network for water depth mapping from multispectral aerial images. J. Photogramm. Remote Sens. Geoinf. Sci. 2021, 89, 71–89. [Google Scholar] [CrossRef]
- Hua, Z.L.; Wang, H.Y.; Wang, L.; Wang, Y.L. Comparison of different methods for interpolation of topography of discrete rivers. Adv. Sci. Technol. Water Resour. 2016, 36, 16–19. (In Chinese) [Google Scholar]














Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, Y.; Xia, J.; Yang, K. A Method for Digital Terrain Reconstruction Using Longitudinal Control Lines and Sparse Measured Cross Sections. Remote Sens. 2022, 14, 1841. https://doi.org/10.3390/rs14081841
Pan Y, Xia J, Yang K. A Method for Digital Terrain Reconstruction Using Longitudinal Control Lines and Sparse Measured Cross Sections. Remote Sensing. 2022; 14(8):1841. https://doi.org/10.3390/rs14081841
Chicago/Turabian StylePan, Yunwen, Junqiang Xia, and Kejun Yang. 2022. "A Method for Digital Terrain Reconstruction Using Longitudinal Control Lines and Sparse Measured Cross Sections" Remote Sensing 14, no. 8: 1841. https://doi.org/10.3390/rs14081841