
Quantitative Measurement of Radio Frequency Interference for SMOS Mission



Abstract
:1. Introduction
- Unauthorized emissions within the protected passive band coming from active sources;
- Unwanted emissions from active services operating in adjacent bands.
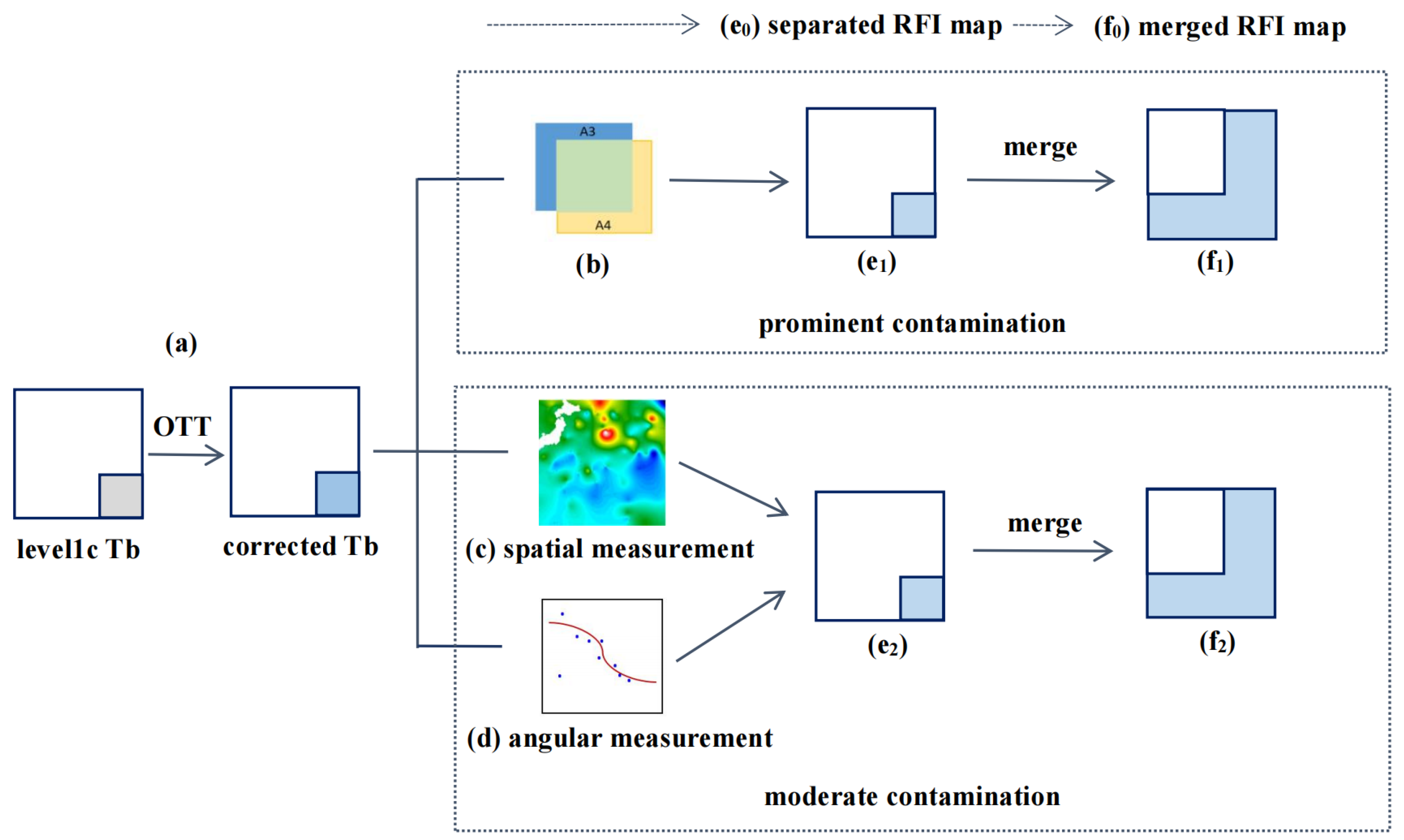
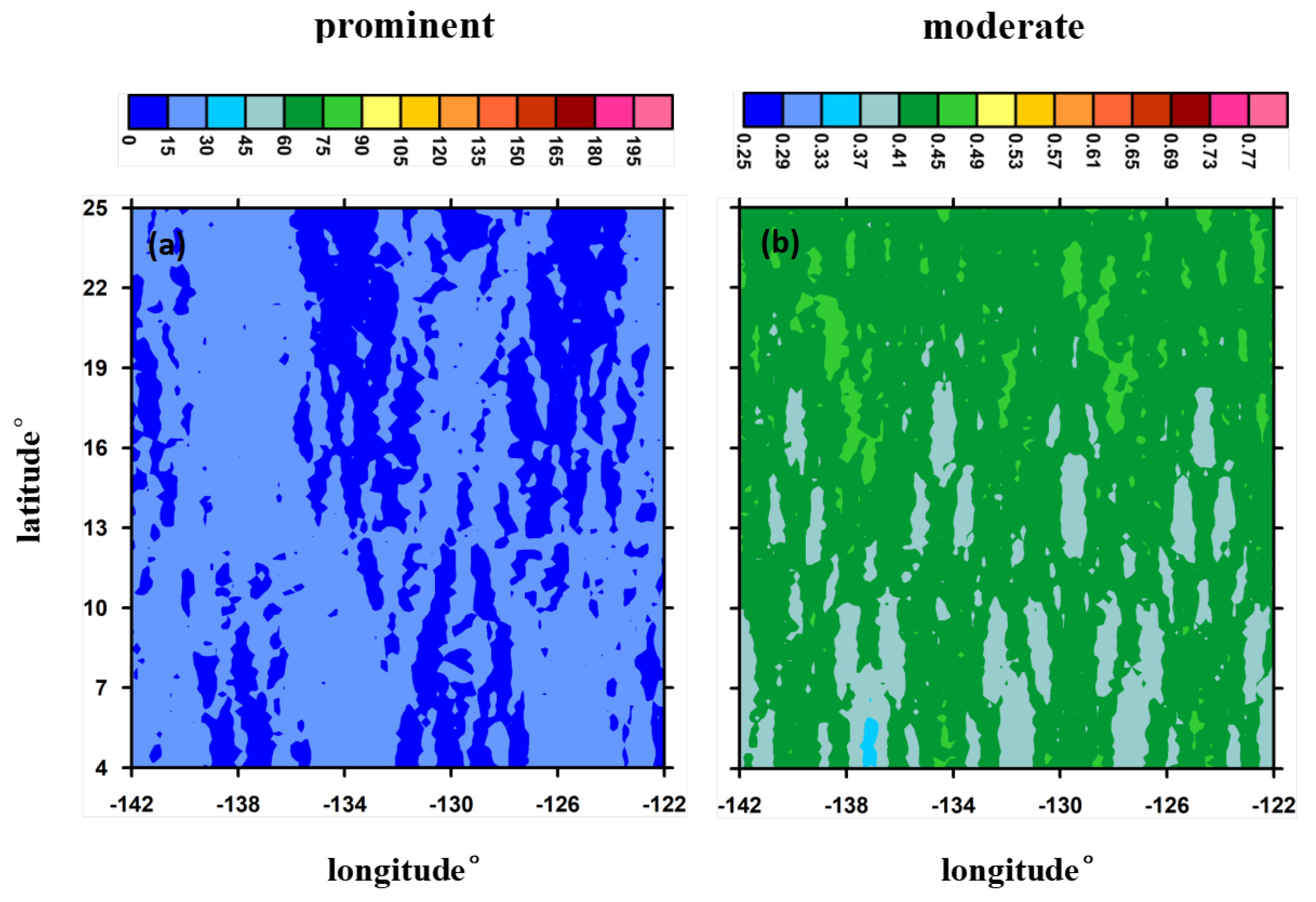
- Prominent contamination: usually caused by on-site RFI emissions;
- Moderate contamination: comes from powerful RFI emissions on nearby land through the secondary lobes’ tails [12].
2. Materials
3. Quantitative Measurement
3.1. Ocean Target Transformation
3.2. Prominent Contamination
3.3. Moderate Contamination
3.3.1. Spatial Measurement
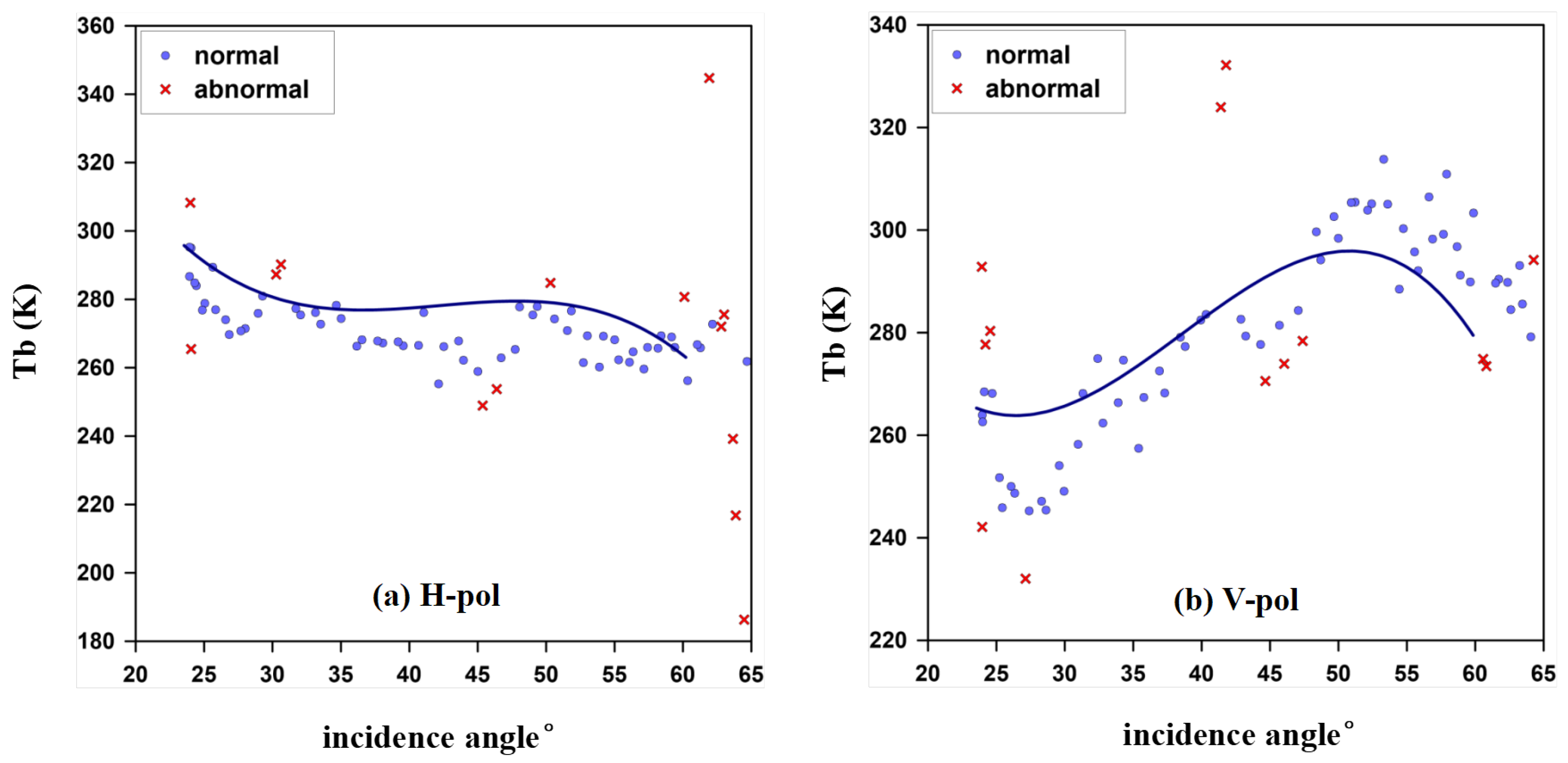
3.3.2. Angular Measurement
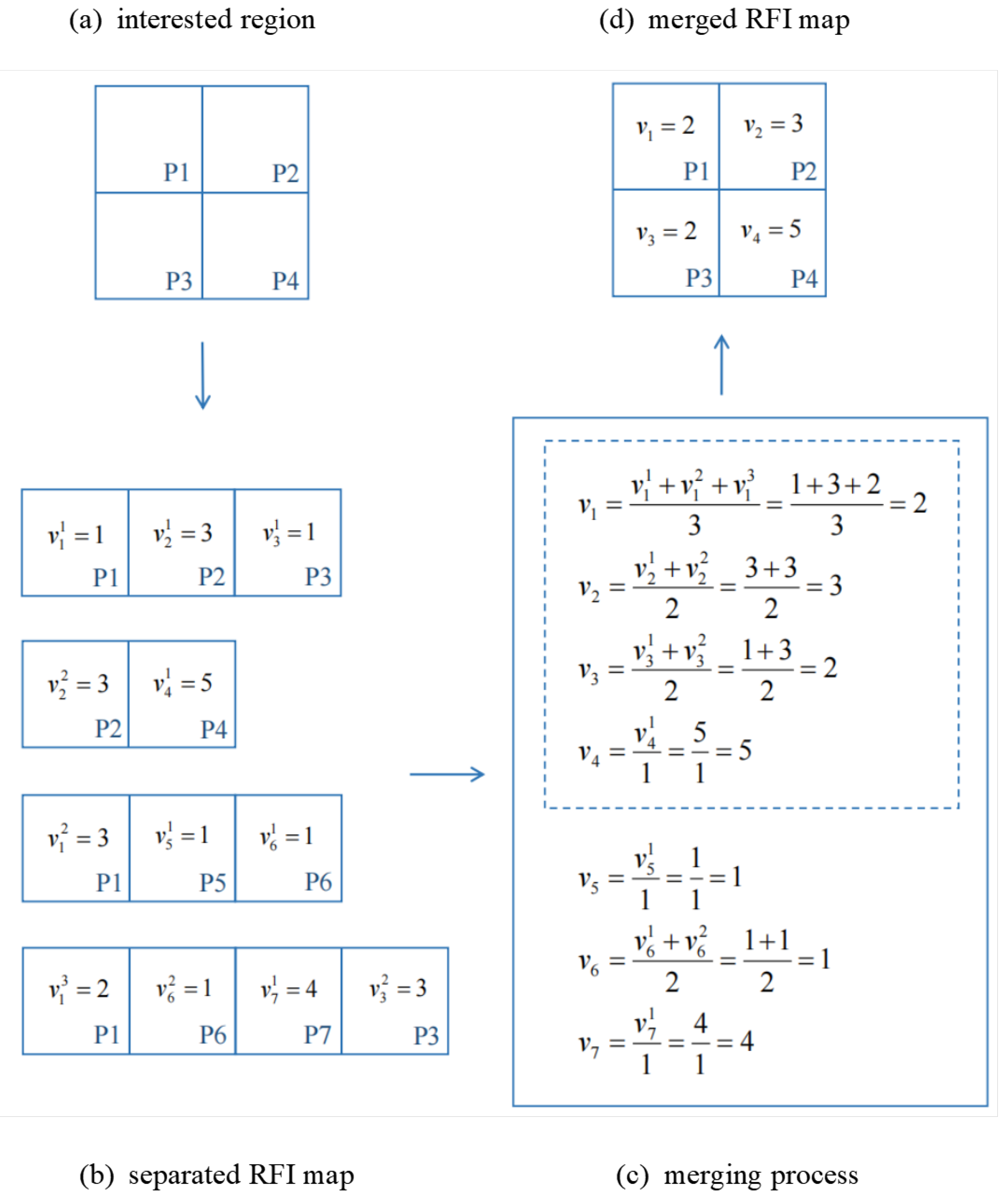
3.4. Merging
- Concatenate every piece of area these passes covered;
- Average RFI statistics of separated maps if points overlap.
4. Results and Discussion
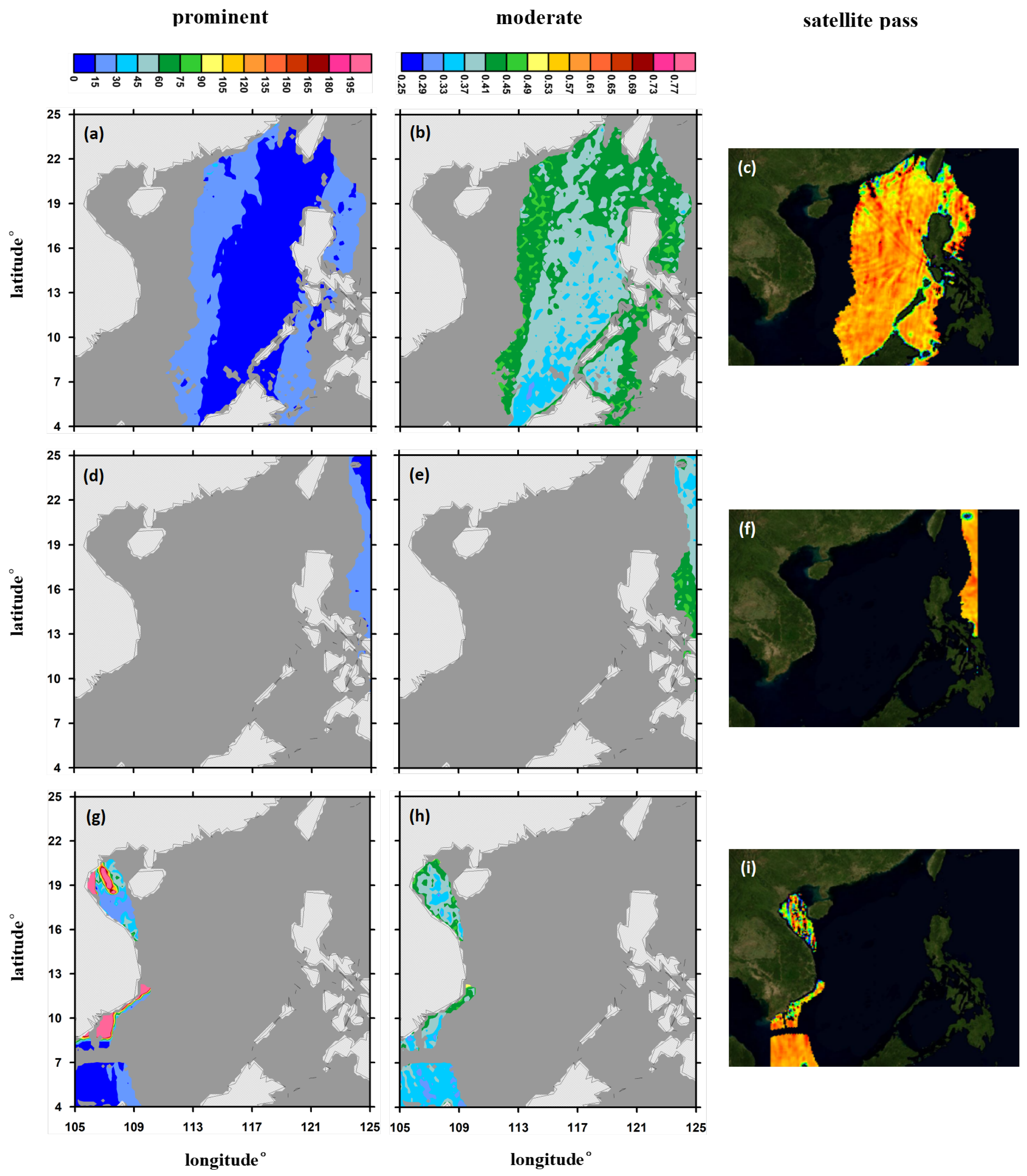
4.1. The Separated RFI Map
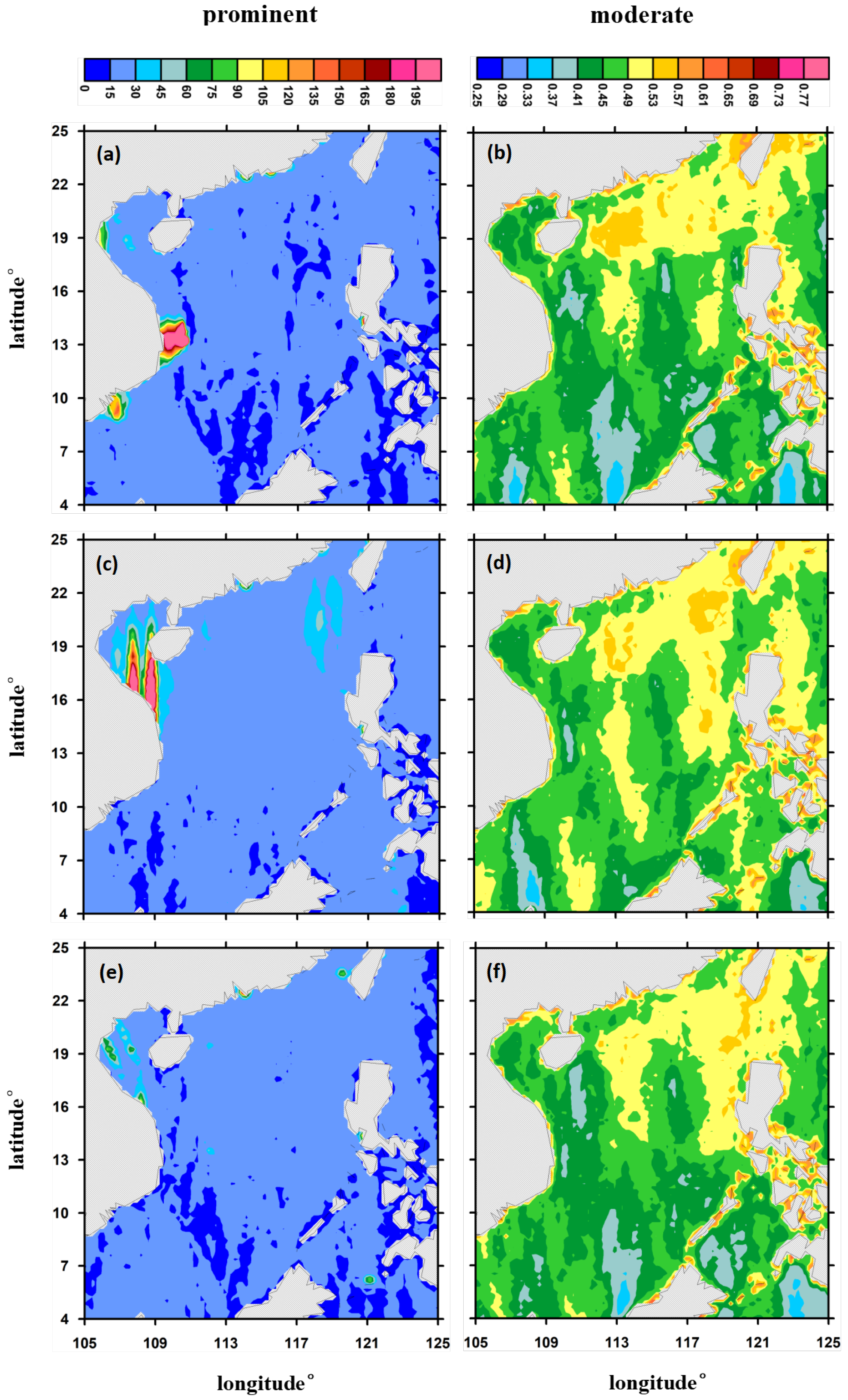
4.2. The 9-Day Merged RFI Map
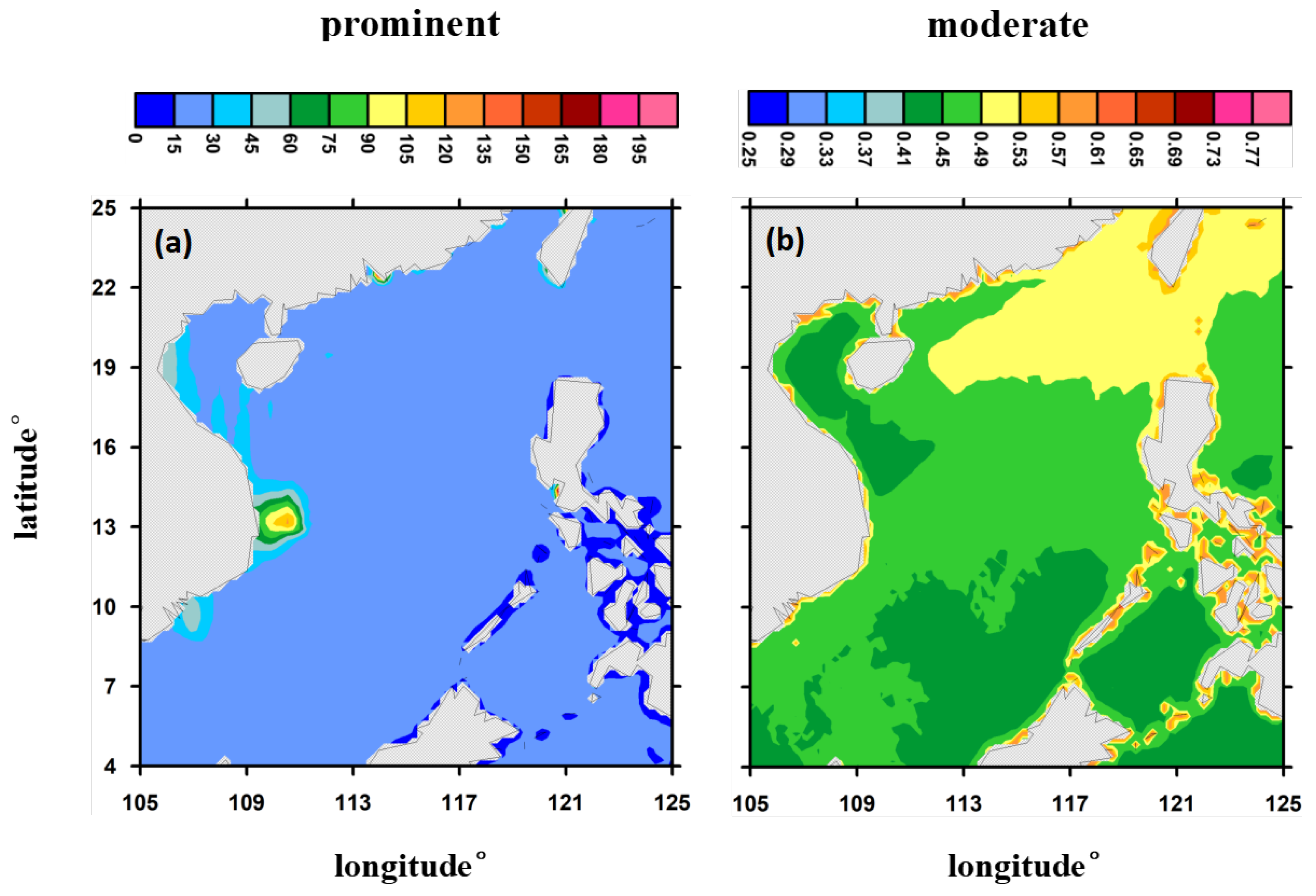
- Intensity: it represents the average of RFI intensity for a given period;
- Probability: it gives an intuition of how likely RFI is to exist during that time.
4.3. The Yearly Merged RFI Map
4.4. Generalization
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yi, D.L.; Melnichenko, O.; Hacker, P.; Potemra, J. Remote Sensing of Sea Surface Salinity Variability in the South China Sea. J. Geophys. Res. Ocean. 2020, 125, e2020JC016827. [Google Scholar] [CrossRef]
- Akter, R.; Asik, T.Z.; Sakib, M.; Sakib, M.; Akter, M.; Sakib, M.N.; Al Azad, A.S.M.; Maruf, M.; Haque, A.; Rahman, M. The dominant climate change event for salinity intrusion in the GBM Delta. Climate 2019, 7, 69. [Google Scholar] [CrossRef] [Green Version]
- Marghany, M.; Hashim, M.; Cracknell, A.P. Modelling Sea Surface Salinity from MODIS Satellite Data. In Proceedings of the International Conference on Computational Science and Its Applications—ICCSA 2010, Fukuoka, Japan, 23–26 March 2010. [Google Scholar]
- Kerr, Y.H.; Waldteufel, P.; Wigneron, J.P.; Delwart, S.; Cabot, F.; Boutin, J.; Escorihuela, M.-J.; Font, J.; Reul, J.; Gruhier, C.; et al. The SMOS mission: New tool for monitoring key elements of the global water cycle. Proc. IEEE 2010, 98, 666–687. [Google Scholar] [CrossRef] [Green Version]
- Font, J.; Camps, A.; Borges, A.; Martin-neira, M.; Boutin, J.; Reul, N.; Escorihuela, M.-J.; Font, J.; Reul, N.; Gruhier, C.; et al. SMOS: The Challenging Sea Surface Salinity Measurement From Space. Proc. IEEE 2010, 98, 649–665. [Google Scholar] [CrossRef] [Green Version]
- Mecklenburg, S.; Drusch, M.; Kerr, Y.H.; Martin-neira, M.; Steven, D.; Buenadicha, G.; Reul, N. ESA’s Soil Moisture and Ocean Salinity Mission: Mission Performance and Operations. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1354–1366. [Google Scholar] [CrossRef] [Green Version]
- Guimbard, S.; Reul, N.; Sabia, R.; Herlédan, S.; Hanna, Z.E.K.; Piollé, J.F.; Paul, F.; Lee, T.; Schanze, J.J.; Bingham, F.M.; et al. The Salinity Pilot-mission Exploitation Platform (Pi-mep): A Hub for Validation and Exploitation of Satellite Sea Surface Salinity Data. Remote Sens. 2021, 13, 4600. [Google Scholar] [CrossRef]
- Barre, H.M.J.P.; Duesmann, B.; Kerr, Y.H. SMOS: The Mission and the System. IEEE Trans. Geosci. Remote Sens. 2008, 46, 587–593. [Google Scholar] [CrossRef]
- McMullan, K.D.; Brown, M.A.; Martin-Neira, M.; Rits, W.; Ekholm, S.; Marti, J.; Lemanczyk, J. SMOS: The Payload. IEEE Trans. Geosci. Remote Sens. 2008, 46, 594–605. [Google Scholar] [CrossRef]
- Expore MIRAS. Available online: https://earth.esa.int/eogateway/instruments/miras (accessed on 15 September 2020).
- SMOS Team. SMOS L2 OS Algorithm Theoretical Baseline Document (ATBD); SO-TN-ARG-GS-0007. Available online: https://earth.esa.int/eogateway/documents/20142/37627/SMOS-L2OS-ATBD.pdf (accessed on 12 February 2021).
- Oliva, R.; Daganzo, E.; Richaume, P.; Kerr, Y.; Cabot, F.; Soldo, Y.; Anterrieu, E.; Reul, N.; Gutierrez, A.; Barbosa, J.; et al. Status of Radio Frequency Interference (RFI) in the 1400-1427 MHz passive band based on six years of SMOS mission. Remote Sens. Environ. 2016, 180, 64–75. [Google Scholar] [CrossRef]
- Skou, N.; Balling, J.E.; Søbjærg, S.S.; Kristensen, S.S. Surveys and Analysis of RFI in the SMOS Context. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Honolulu, HI, USA, 25–30 June 2010; pp. 2011–2014. [Google Scholar]
- Oliva, R.; Daganzo, E.; Kerr, Y.H.; Mecklenburg, S.; Nieto, S.; Richaume, P.; Gruhier, C. SMOS radio frequency interference scenario: Status and actions taken to improve the RFI environment in the 1400–1427-MHz passive band. IEEE Trans. Geosci. Remote Sens. (TGRS) 2012, 50, 1427–1439. [Google Scholar] [CrossRef] [Green Version]
- Camps, A.; Gourrion, J.; Tarongi, J.M.; Gutierrez, A.; Castro, R. RFI analysis in SMOS imagery. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Honolulu, HI, USA, 25–30 June 2010. [Google Scholar]
- Anterrieu, E. On the detection and quantification of RFI in L1a signals provided by SMOS. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3986–3992. [Google Scholar] [CrossRef]
- Li, L.; Njoku, E.G.; Im, E.; Chang, P.S.; Germain, K.S. A preliminary survey of radio-frequency interference over the U.S. in Aqua AMSR-E data. IEEE Trans. Geosci. Remote Sens. 2004, 42, 380–390. [Google Scholar] [CrossRef]
- Soldo, Y.; Cabot, F.; Khazaal, A.; Miernecki, M.; Slominska, E.; Fieuzal, R.; Kerr, Y.H. Localization of RFI sources for the SMOS Mission: A means for assessing SMOS pointing performances. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 617–627. [Google Scholar] [CrossRef]
- Park, H.; González-Gambau, V.; Camps, A.; Vall-Llossera, M. Improved MUSIC-Based SMOS RFI source detection and geolocation algorithm. IEEE Trans. Geosci. Remote Sens. 2015, 54, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Li, C.; Zhao, H.; Li, H.; Lv, K. Statistical models of sea surface salinity in the south china sea based on SMOS satellite data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 9, 2658–2664. [Google Scholar] [CrossRef]
- Ren, Y.; Dong, Q.; He, M. Preliminary validation of SMOS sea surface salinity measurements in the South China Sea. Chin. J. Oceanol. Limnol. 2015, 33, 262–271. [Google Scholar] [CrossRef] [Green Version]
- Boutin, J.; Vergely, J.L.; Khvorostyanov, D. SMOS SSS L3 Maps Generated by CATDS CEC LOCEAN Debias V5.0. SEANOE. 2020. Available online: http://www.catds.fr/Products/Available-products-from-CPDC (accessed on 20 October 2020).
- The Global SMOS SSS v2.0 Produced at BEC Is Freely Available through Its Data Visualization and Distribution Service. Available online: http://bec.icm.csic.es/bec-ftp-service/ (accessed on 20 October 2020).
- SMOS Team. SMOS Level1 and Auxiliary Data Products Specifications; SO-TN-IDR-GS-0005. Available online: https://earth.esa.int/eogateway/documents/20142/37627/SMOS-L1-Aux-Data-Product-Specification.pdf (accessed on 9 December 2021).
- SMOS Team. SMOS Level2 and Auxiliary Data Products Specifications; SO-TN-IDR-GS-0006. Available online: https://earth.esa.int/eogateway/documents/20142/0/SMOS-L2-Aux-Data-Product-Specification.pdf (accessed on 31 January 2020).
- Yin, X.; Boutin, J.; Spurgeon, P. Biases between measured and simulated SMOS brightness temperatures over ocean: Influence of sun. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 1341–1350. [Google Scholar] [CrossRef] [Green Version]
- Yin, X.; Boutin, J.; Spurgeon, P. First assessment of SMOS data over open ocean: Part I-pacific ocean. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1648–1661. [Google Scholar] [CrossRef]
- Kristensen, S.S.; Balling, J.E.; Skou, N.; Sobjaerg, S.S. RFI detection in SMOS data using 3rd and 4th Stokes parameters. In Proceedings of the IEEE Microwave Radiometry and Remote Sensing of the Environment, Rome, Italy, 5–9 March 2012. [Google Scholar]
- Balling, J.E.; Sobjaerg, S.S.; SkouKristensen, S.S.; Skou, N. RFI and SMOS: Preparatory Campaigns and First Observations from Space. In Proceedings of the IEEE Microwave Radiometry and Remote Sensing of the Environment, Washington, DC, USA, 1–4 March 2010. [Google Scholar]
- Swift, C.T. Passive microwave remote sensing of the ocean—A review. Bound.-Layer Meteorol. 1980, 18, 25–54. [Google Scholar] [CrossRef]
- Daganzo-Eusebio, E.; Oliva, R.; Kerr, Y.H.; Nieto, S. SMOS radiometer in the 1400-1427-MHz passive band: Impact of the RFI environment and approach to its mitigation and cancellation. IEEE Trans. Geosci. Remote Sens. 2013, 51, 4999–5007. [Google Scholar] [CrossRef] [Green Version]
- Misra, S.; Ruf, C.S. Analysis of radio frequency interference detection algorithms in the angular domain for SMOS. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1448–1457. [Google Scholar] [CrossRef]
- Metadata provided by CMEMS, Credits: E.U. Copernicus Marine Service Information. Available online: https://resources.marine.copernicus.eu (accessed on 20 October 2020).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level | Based on |
|---|---|
| Level 1A | Temporal evolution of zero baseline |
| Level 1C | Observed intensity of RFI source from a known RFI list |
| Level 1C | Observed intensity of RFI source from a known RFI list |
| Level 2 | Min/max expected surface brightness temperature |
| Level 2 | Excessive spatial standard deviation in snapshot |
| Level 2 | Outlier detection |
| Products | Level 1c Tb | Level 2 OSUDP | Level 2 OSDAP |
|---|---|---|---|
| Description | Multi-incidence angle brightness temperatures, geo-located in an equal-area grid system. | The retrieved sea surface salinity, including theorical estimate of accuracy and flags for the product quality. | Quality control information in SSS retrieval for more advanced users. |
| 1 Contents | Grid_Point_ID Latitude (deg) Longitude (deg) * BT_Value_Real (K) * BT_Value_Imag (K) * Pixel_Radiometric_Accuracy (K) * Incidence_Angle (deg) * Snapshot_ID | Grid_Point_ID Latitude (deg) Longitude (deg) SSS_corr (psu) SST (C) | Grid_Point_ID Latitude (deg) Longitude (deg) * Diff_TB (K) * Snapshot_ID |
| Type | preprocessed data | preprocessed data | preprocessed data |
| Format | Earth Explore (EE) file NetCDF | Earth Explore (EE) file NetCDF | Earth Explore (EE) file |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, M.; Li, H.; Chen, H.; Yin, X. Quantitative Measurement of Radio Frequency Interference for SMOS Mission. Remote Sens. 2022, 14, 1669. https://doi.org/10.3390/rs14071669
Xu M, Li H, Chen H, Yin X. Quantitative Measurement of Radio Frequency Interference for SMOS Mission. Remote Sensing. 2022; 14(7):1669. https://doi.org/10.3390/rs14071669
Chicago/Turabian StyleXu, Ming, Hongping Li, Haihua Chen, and Xiaobin Yin. 2022. "Quantitative Measurement of Radio Frequency Interference for SMOS Mission" Remote Sensing 14, no. 7: 1669. https://doi.org/10.3390/rs14071669