
An Adaptive Surrogate-Assisted Endmember Extraction Framework Based on Intelligent Optimization Algorithms for Hyperspectral Remote Sensing Images


Abstract
:1. Introduction
- (1)
- This paper solves the endmember extraction problem with the proposed ASAEE framework. The overall convergence characteristics and the time-consuming issue can be significantly improved by the proposed framework.
- (2)
- Three algorithms of ASAEE-GA, ASAEE-PSO and ASAEE-DE based on the ASAEE framework are specifically designed. The experimental results of these three algorithms have been greatly improved compared with the corresponding state-of-the-art intelligent-based endmember extraction algorithms.
- (3)
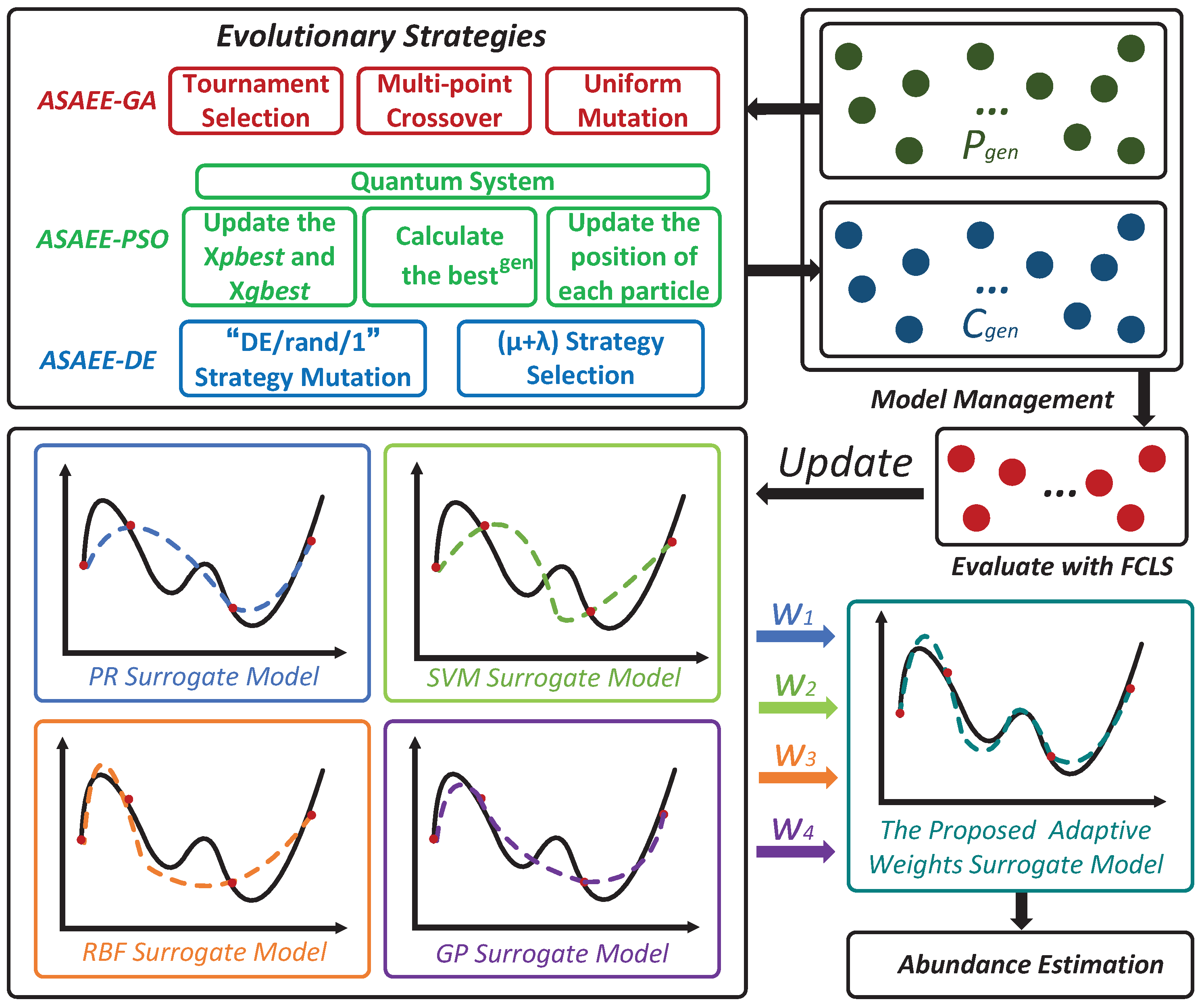
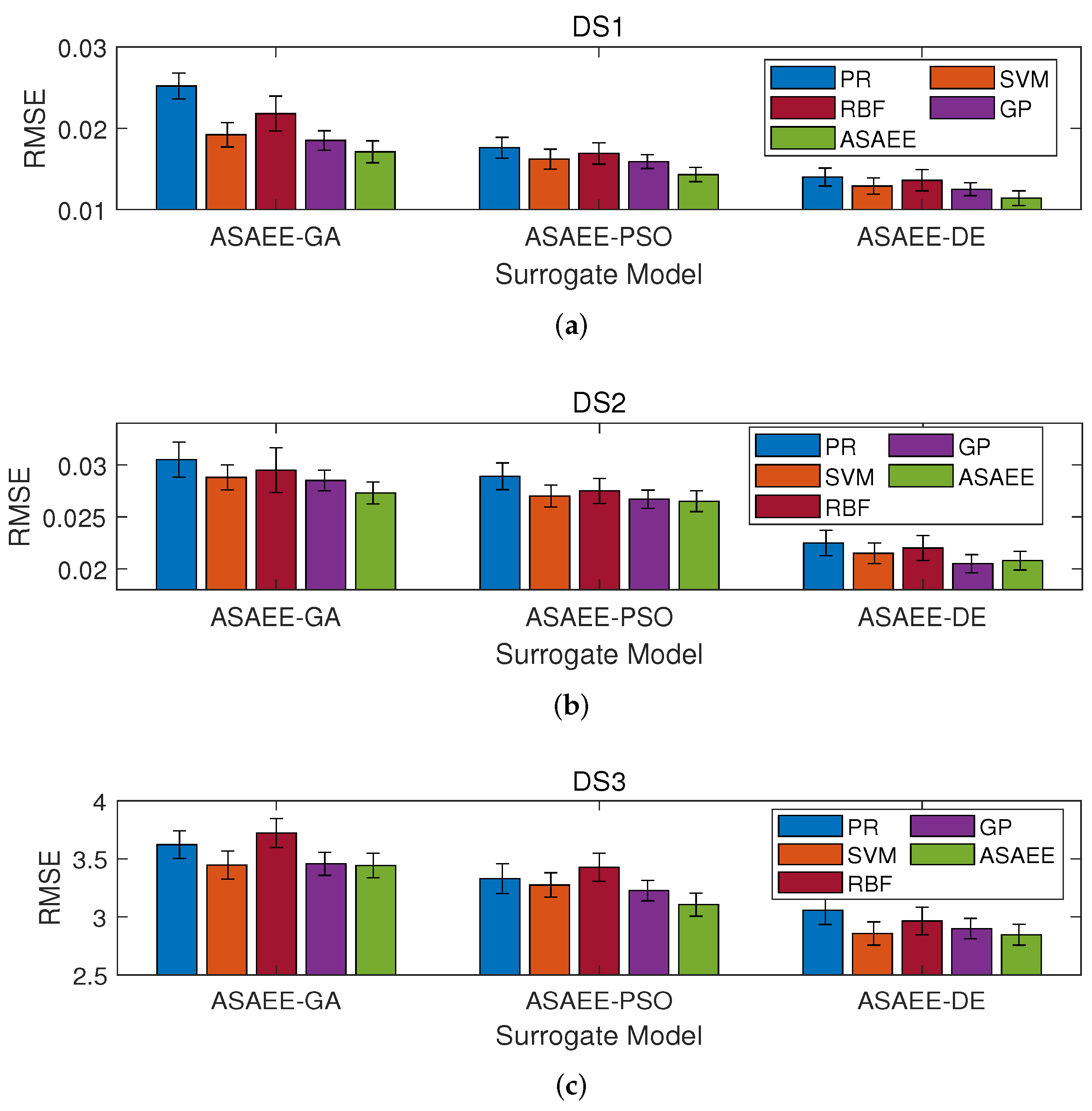
- An adaptive weight surrogate-assisted model selection algorithm is designed, which is able to automatically adjust the weights of different surrogate-assisted models according to the characteristics of different intelligent optimization algorithms.
- (4)
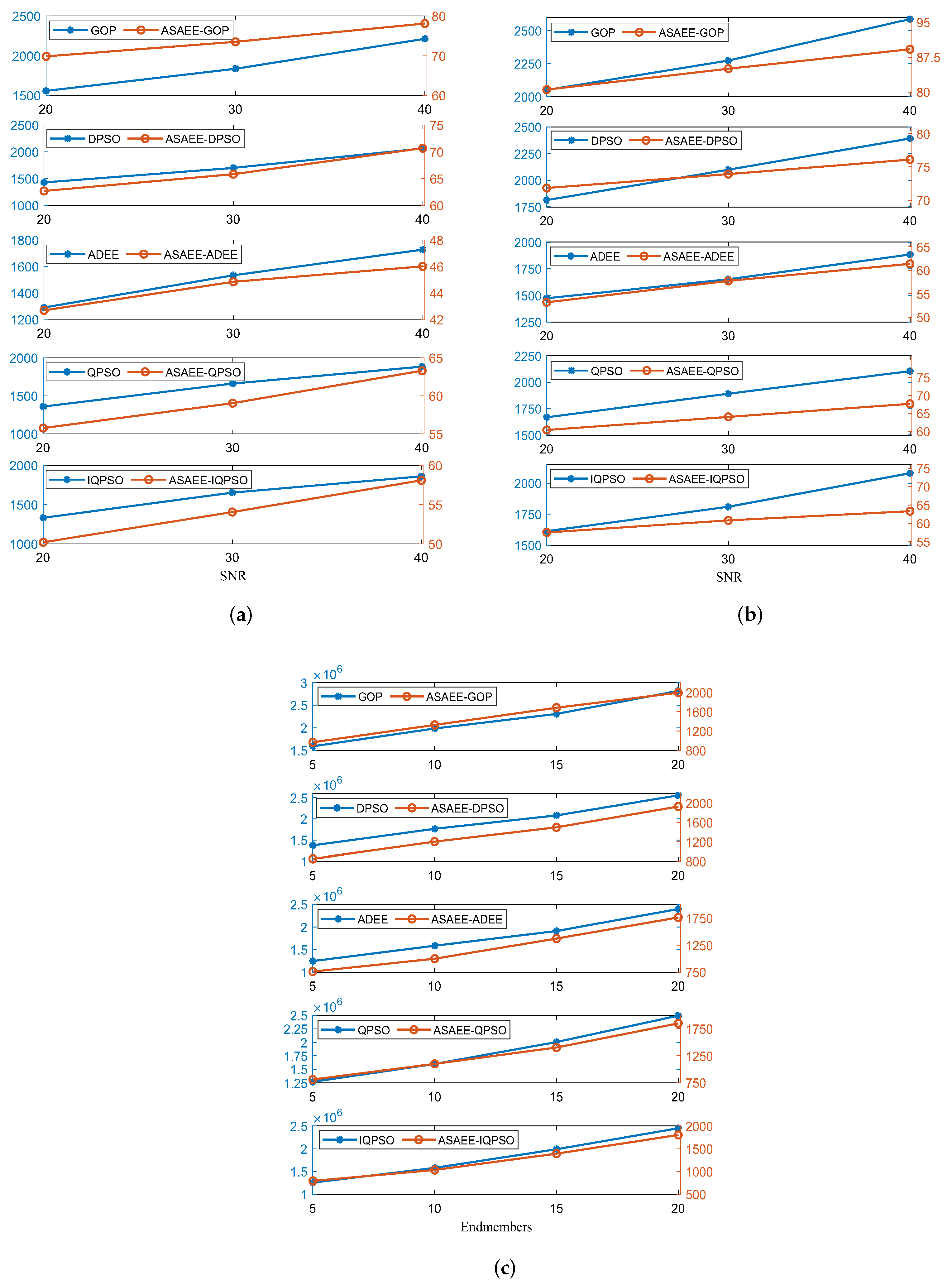
- We also transfer the ASAEE framework to other intelligent-based endmember extraction algorithms, which greatly reduces the expensive time cost while maintaining the accuracy.
2. Related Work
2.1. Intelligent-Based Endmember Extraction Algorithms
2.2. Brief Introduction of the Surrogate-Assisted Models
3. Proposed Method
3.1. Motivation
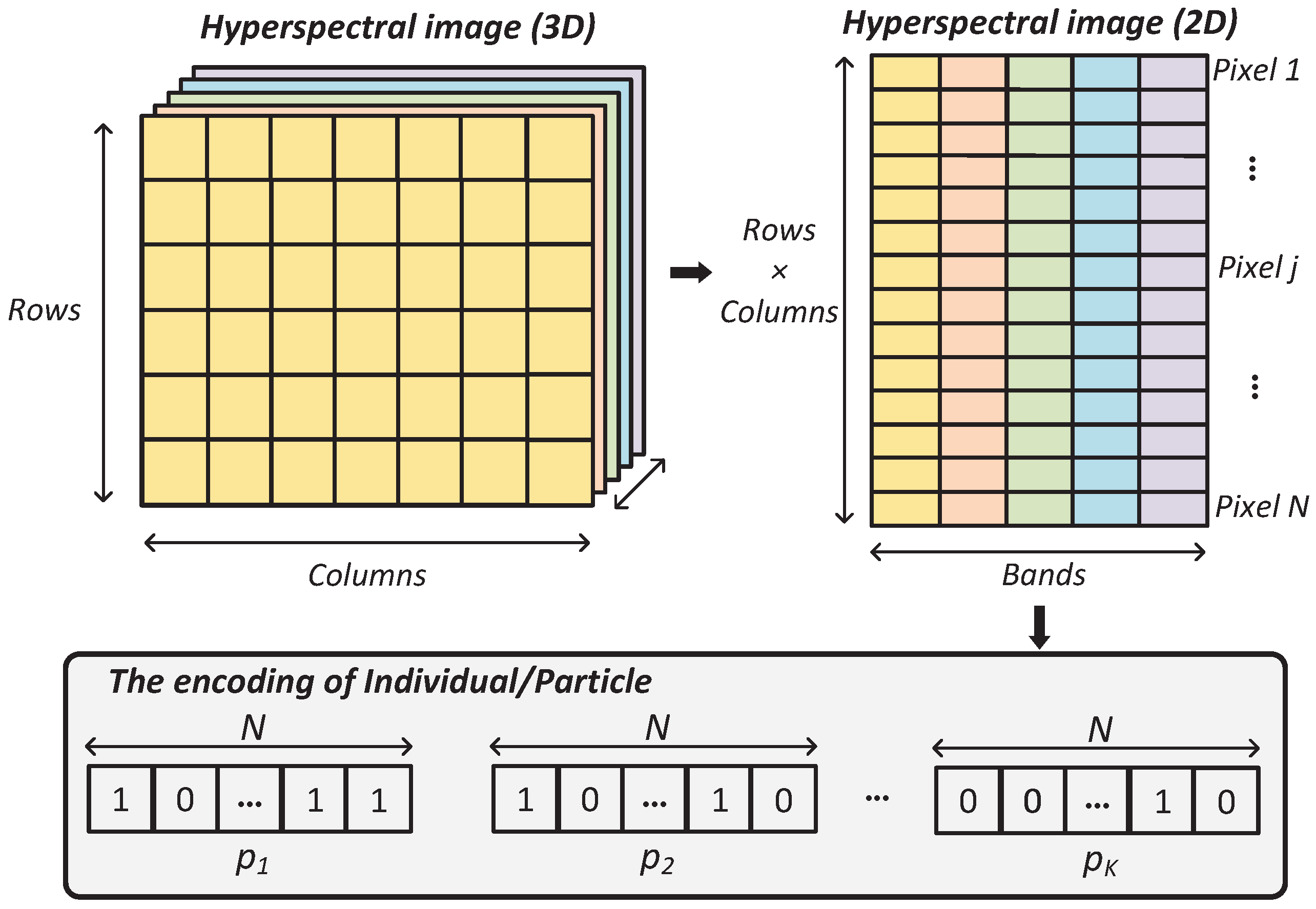
3.2. Initialization and Objective Optimization Function
3.3. ASAEE Framework
| Algorithm 1 The ASAEE Framework |
Input:Y: the original hyperspectral image, Maxgen: the max generation number, K: the population size. Output:: the endmember set for reconstructing the remixed image.
|
3.4. Evolution Strategies
3.4.1. ASAEE-GA
3.4.2. ASAEE-PSO
3.4.3. ASAEE-DE
4. Experimental Results
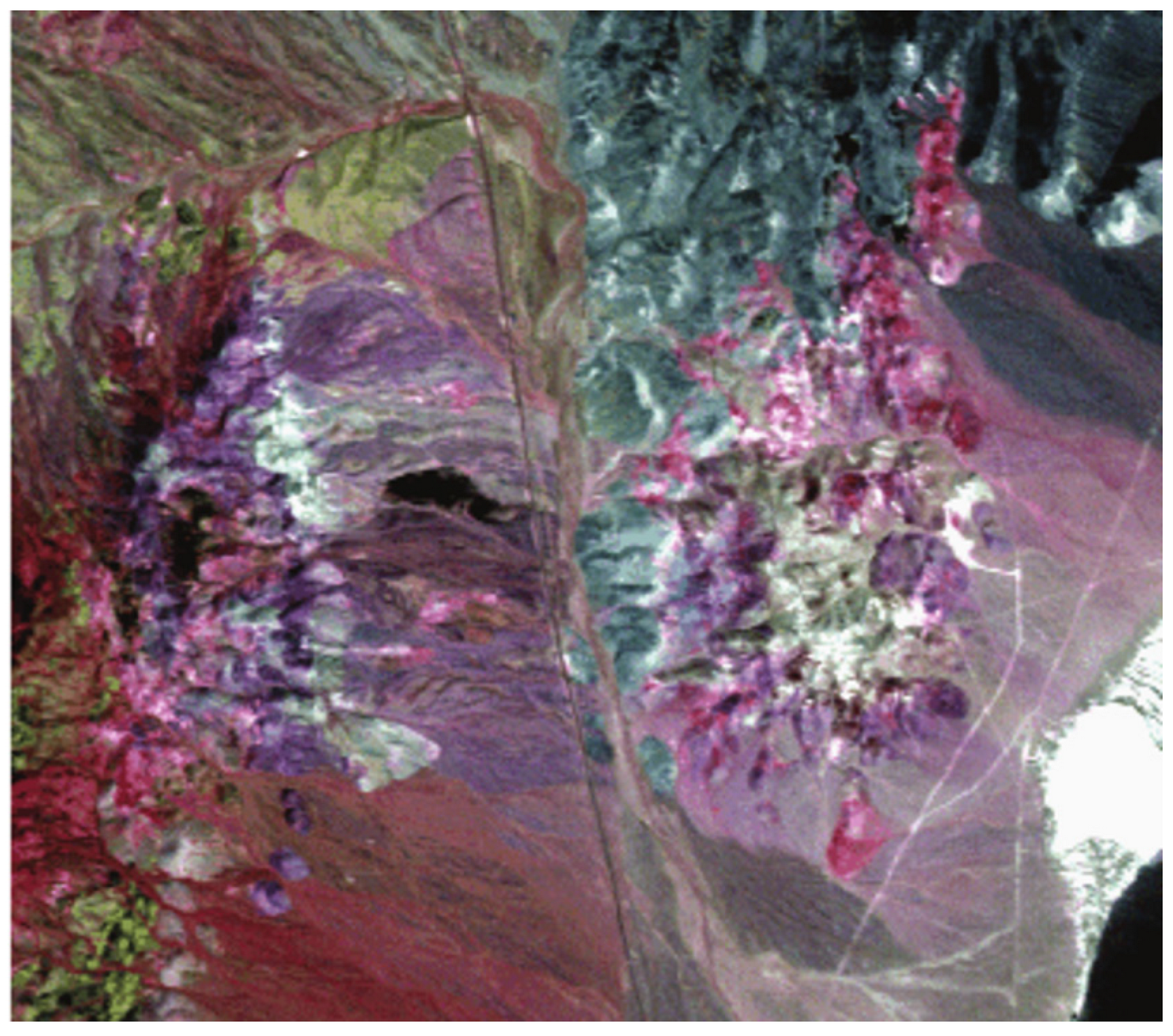
4.1. Data Sets Description
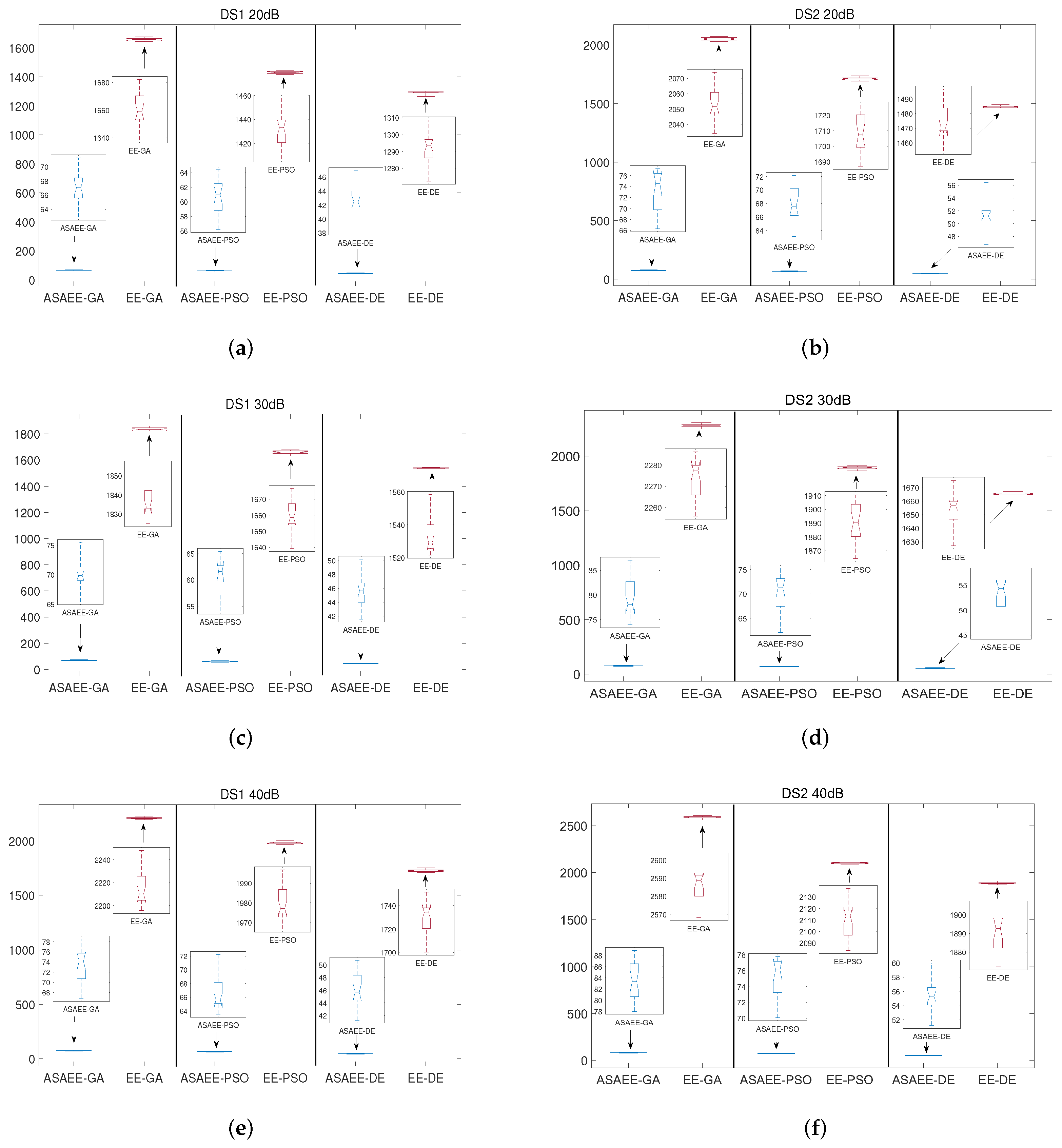
4.2. Experiments on the Proposed ASAEE Framework
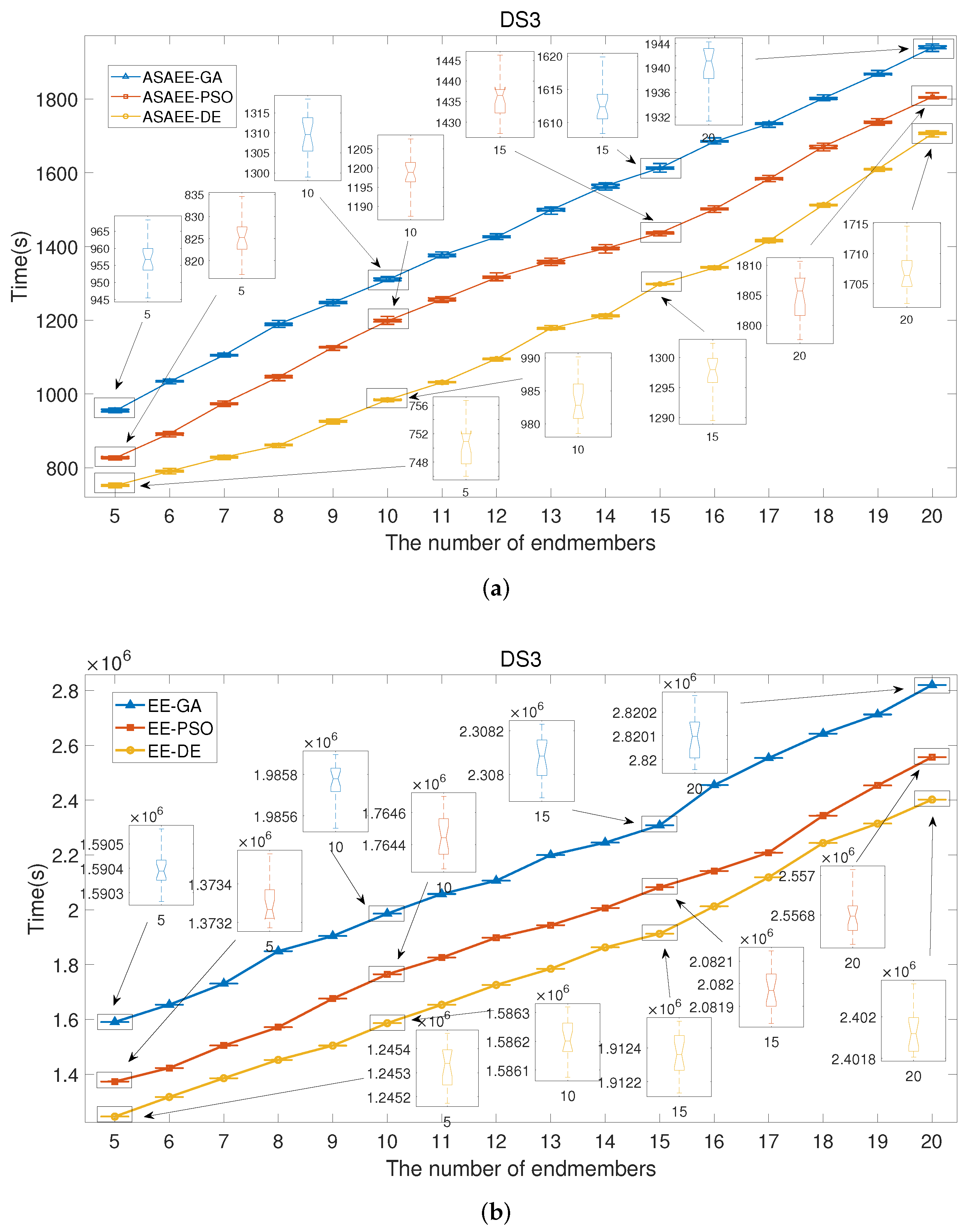
4.3. Comparison of the Proposed ASAEE with Other Methods
4.4. Transfer to Other Intelligent-Based Endmember Extraction Algorithms
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wu, Y.; Ma, W.; Gong, M.; Su, L.; Jiao, L. A Novel Point-Matching Algorithm Based on Fast Sample Consensus for Image Registration. IEEE Geosci. Remote Sens. Lett. 2015, 12, 43–47. [Google Scholar] [CrossRef]
- Wu, Y.; Li, J.; Yuan, Y.; Qin, A.K.; Miao, Q.G.; Gong, M.G. Commonality Autoencoder: Learning Common Features for Change Detection from Heterogeneous Images. IEEE Trans. Neural Netw. Learn. Syst. 2021, 1–14. [Google Scholar] [CrossRef]
- Brown, A.J.; Hook, S.J.; Baldridge, A.M.; Crowley, J.K.; Bridges, N.T.; Thomson, B.J.; Marion, G.M.; de Souza Filho, C.R.; Bishop, J.L. Hydrothermal formation of clay-carbonate alteration assemblages in the Nili Fossae region of Mars. Earth Planet. Sci. Lett. 2010, 297, 174–182. [Google Scholar] [CrossRef] [Green Version]
- Jiao, Q.; Zhang, B.; Liu, J.; Liu, L. A novel two-step method for winter wheat-leaf chlorophyll content estimation using a hyperspectral vegetation index. Int. J. Remote Sens. 2014, 35, 7363–7375. [Google Scholar] [CrossRef]
- Wu, Y.; Xiao, Z.; Liu, S.; Miao, Q.; Ma, W.; Gong, M.; Xie, F.; Zhang, Y. A Two-Step Method for Remote Sensing Images Registration Based on Local and Global Constraints. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 5194–5206. [Google Scholar] [CrossRef]
- Plaza, A.; Du, Q.; Bioucas-Dias, J.M.; Jia, X.; Kruse, F.A. Foreword to the Special Issue on Spectral Unmixing of Remotely Sensed Data. IEEE Trans. Geosci. Remote Sens. 2011, 49, 4103–4110. [Google Scholar] [CrossRef] [Green Version]
- Plaza, A.; Martinez, P.; Perez, R.; Plaza, J. A quantitative and comparative analysis of endmember extraction algorithms from hyperspectral data. IEEE Trans. Geosci. Remote Sens. 2004, 42, 650–663. [Google Scholar] [CrossRef]
- Chang, X.; Nie, F.; Wang, S.; Yang, Y.; Zhou, X.; Zhang, C. Compound Rank-k Projections for Bilinear Analysis. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 1502–1513. [Google Scholar] [CrossRef] [Green Version]
- Bioucas-Dias, J.M.; Plaza, A.; Dobigeon, N.; Parente, M.; Du, Q.; Gader, P.; Chanussot, J. Hyperspectral Unmixing Overview: Geometrical, Statistical, and Sparse Regression-Based Approaches. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2012, 5, 354–379. [Google Scholar] [CrossRef] [Green Version]
- Marrero, R.; Lopez, S.; Callico, G.M.; Veganzones, M.A.; Plaza, A.; Chanussot, J.; Sarmiento, R. A Novel Negative Abundance-Oriented Hyperspectral Unmixing Algorithm. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3772–3790. [Google Scholar] [CrossRef]
- Ma, W.K.; Bioucas-Dias, J.M.; Chan, T.H.; Gillis, N.; Gader, P.; Plaza, A.J.; Ambikapathi, A.; Chi, C.Y. A Signal Processing Perspective on Hyperspectral Unmixing: Insights from Remote Sensing. IEEE Signal Process. Mag. 2014, 31, 67–81. [Google Scholar] [CrossRef] [Green Version]
- Boardman, J.W.; Kruse, F.A.; Green, R.O. Mapping target signatures via partial unmixing of AVIRIS data. In Summaries of the Fifth Annual JPL Airborne Earth Science Workshop; JPL Publication 95–1; NASA Jet Propulsion Laboratory: Pasadena, CA, USA, 1995; pp. 23–26. [Google Scholar]
- Winter, M.E. N-FINDR: An algorithm for fast autonomous spectral end-member determination in hyperspectral data. Proc. SPIE 1999, 3753, 266–275. [Google Scholar]
- Nascimento, J.; Dias, J. Vertex component analysis: A fast algorithm to unmix hyperspectral data. IEEE Trans. Geosci. Remote Sens. 2005, 43, 898–910. [Google Scholar] [CrossRef] [Green Version]
- Gao, L.; Gao, J.; Li, J.; Plaza, A.; Zhuang, L.; Sun, X.; Zhang, B. Multiple Algorithm Integration Based on Ant Colony Optimization for Endmember Extraction From Hyperspectral Imagery. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2015, 8, 2569–2582. [Google Scholar] [CrossRef]
- Yuan, Y.; Feng, Y.; Lu, X. Statistical Hypothesis Detector for Abnormal Event Detection in Crowded Scenes. IEEE Trans. Cybern. 2017, 47, 3597–3608. [Google Scholar] [CrossRef]
- Graña, M.; Veganzones, M.A. Endmember induction by lattice associative memories and multi-objective genetic algorithms. EURASIP J. Adv. Signal Process. 2012, 2012, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Cheng, Q.; Du, B.; Zhang, L.; Liu, R. ANSGA-III: A Multiobjective Endmember Extraction Algorithm for Hyperspectral Images. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2019, 12, 700–721. [Google Scholar] [CrossRef]
- Rezaei, Y.; Mobasheri, M.R.; Zoej, M.J.V.; Schaepman, M.E. Endmember Extraction Using a Combination of Orthogonal Projection and Genetic Algorithm. IEEE Geosci. Remote Sens. Lett. 2012, 9, 161–165. [Google Scholar] [CrossRef]
- Li, J.; Li, H.; Liu, Y.; Gong, M. Multi-fidelity evolutionary multitasking optimization for hyperspectral endmember extraction. Appl. Soft Comput. 2021, 111, 107713. [Google Scholar] [CrossRef]
- Zhang, B.; Sun, X.; Gao, L.; Yang, L. Endmember Extraction of Hyperspectral Remote Sensing Images Based on the Discrete Particle Swarm Optimization Algorithm. IEEE Trans. Geosci. Remote Sens. 2011, 49, 4173–4176. [Google Scholar] [CrossRef]
- Liu, R.; Du, B.; Zhang, L. Multiobjective Optimized Endmember Extraction for Hyperspectral Image. Remote Sens. 2017, 9, 558. [Google Scholar] [CrossRef] [Green Version]
- Liu, R.; Zhang, L.; Du, B. A Novel Endmember Extraction Method for Hyperspectral Imagery Based on Quantum-Behaved Particle Swarm Optimization. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2017, 10, 1610–1631. [Google Scholar] [CrossRef]
- Xu, M.; Zhang, L.; Du, B.; Zhang, L.; Fan, Y.; Song, D. A Mutation Operator Accelerated Quantum-Behaved Particle Swarm Optimization Algorithm for Hyperspectral Endmember Extraction. Remote Sens. 2017, 9, 197. [Google Scholar] [CrossRef] [Green Version]
- Tong, L.; Du, B.; Liu, R.; Zhang, L. An Improved Multiobjective Discrete Particle Swarm Optimization for Hyperspectral Endmember Extraction. IEEE Trans. Geosci. Remote Sens. 2019, 57, 7872–7882. [Google Scholar] [CrossRef]
- Du, B.; Wei, Q.; Liu, R. An Improved Quantum-Behaved Particle Swarm Optimization for Endmember Extraction. IEEE Trans. Geosci. Remote Sens. 2019, 57, 6003–6017. [Google Scholar] [CrossRef]
- Liu, R.; Zhu, X. Endmember Bundle Extraction Based on Multiobjective Optimization. IEEE Trans. Geosci. Remote Sens. 2021, 59, 8630–8645. [Google Scholar] [CrossRef]
- Zhong, Y.; Zhao, L.; Zhang, L. An Adaptive Differential Evolution Endmember Extraction Algorithm for Hyperspectral Remote Sensing Imagery. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1061–1065. [Google Scholar] [CrossRef]
- Tong, L.; Du, B.; Liu, R.; Zhang, L.; Tan, K.C. Hyperspectral Endmember Extraction by (μ+λ) Multiobjective Differential Evolution Algorithm Based on Ranking Multiple Mutations. IEEE Trans. Geosci. Remote Sens. 2021, 59, 2352–2364. [Google Scholar] [CrossRef]
- Liu, R.; Du, B.; Zhang, L. Multiobjective endmember extraction for hyperspectral image. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 1161–1164. [Google Scholar]
- Yan, C.; Chang, X.; Luo, M.; Zheng, Q.; Zhang, X.; Li, Z.; Nie, F. Self-weighted robust LDA for multiclass classification with edge classes. ACM Trans. Intell. Syst. Technol. 2020, 12, 1–19. [Google Scholar] [CrossRef]
- Lu, X.; Liu, L.; Nie, L.; Chang, X.; Zhang, H. Semantic-Driven Interpretable Deep Multi-Modal Hashing for Large-Scale Multimedia Retrieval. IEEE Trans. Multimed. 2021, 23, 4541–4554. [Google Scholar] [CrossRef]
- Guan, W.; Song, X.; Gan, T.; Lin, J.; Chang, X.; Nie, L. Cooperation Learning From Multiple Social Networks: Consistent and Complementary Perspectives. IEEE Trans. Cybern. 2021, 51, 4501–4514. [Google Scholar] [CrossRef]
- Zhou, Z.; Ong, Y.S.; Nguyen, M.H.; Lim, D. A study on polynomial regression and Gaussian process global surrogate model in hierarchical surrogate-assisted evolutionary algorithm. In Proceedings of the 2005 IEEE Congress on Evolutionary Computation, Edinburgh, UK, 2–5 September 2005; Volume 3, pp. 2832–2839. [Google Scholar]
- Loshchilov, I.; Schoenauer, M.; Sebag, M. Self-adaptive surrogate-assisted covariance matrix adaptation evolution strategy. In Proceedings of the 14th Annual Conference on Genetic and Evolutionary Computation, Philadelphia, PA, USA, 7–11 July 2012; pp. 321–328. [Google Scholar]
- Herrera, M.; Guglielmetti, A.; Xiao, M.; Coelho, R.F. Metamodel-assisted optimization based on multiple kernel regression for mixed variables. Struct. Multidiscipl. Optim. 2014, 49, 979–991. [Google Scholar] [CrossRef]
- Loshchilov, I.; Schoenauer, M.; Sebag, M. A mono surrogate for multiobjective optimization. In Proceedings of the 12th Annual Conference on Genetic and Evolutionary Computation, Portland, OR, USA, 7–11 July 2010; pp. 471–478. [Google Scholar]
- Ong, Y.S.; Nair, P.B.; Keane, A.J. Evolutionary optimization of computationally expensive problems via surrogate modeling. AIAA J. 2003, 41, 687–696. [Google Scholar] [CrossRef] [Green Version]
- Zapotecas Martínez, S.; Coello Coello, C.A. MOEA/D assisted by RBF networks for expensive multi-objective optimization problems. In Proceedings of the 15th Annual Conference on Genetic and Evolutionary Computation, Amsterdam, The Netherlands, 6–10 July 2013; pp. 1405–1412. [Google Scholar]
- Buche, D.; Schraudolph, N.; Koumoutsakos, P. Accelerating evolutionary algorithms with Gaussian process fitness function models. IEEE Trans. Syst. Man Cybern. C Appl. Rev. 2005, 35, 183–194. [Google Scholar] [CrossRef]
- Zhang, Q.; Liu, W.; Tsang, E.; Virginas, B. Expensive Multiobjective Optimization by MOEA/D With Gaussian Process Model. IEEE Trans. Evol. Comput. 2010, 14, 456–474. [Google Scholar] [CrossRef]
- Zhang, B.; Sun, X.; Gao, L.; Yang, L. Endmember Extraction of Hyperspectral Remote Sensing Images Based on the Ant Colony Optimization (ACO) Algorithm. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2635–2646. [Google Scholar] [CrossRef]
- Sun, X.; Yang, L.; Zhang, B.; Gao, L.; Gao, J. An Endmember Extraction Method Based on Artificial Bee Colony Algorithms for Hyperspectral Remote Sensing Images. Remote Sens. 2015, 7, 16363–16383. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Qin, Q.; Zhang, T.; Sun, Y.; Chen, C. Endmember extraction from hyperspectral image based on discrete firefly algorithm (EE-DFA). ISPRS J. Photogramm. Remote Sens. 2017, 126, 108–119. [Google Scholar] [CrossRef] [Green Version]
- Damodaran, B.B.; Courty, N.; Lefèvre, S. Sparse Hilbert Schmidt Independence Criterion and Surrogate-Kernel-Based Feature Selection for Hyperspectral Image Classification. IEEE Trans. Geosci. Remote Sens. 2017, 55, 2385–2398. [Google Scholar] [CrossRef] [Green Version]
- Han, T.; Goodenough, D.G. Investigation of Nonlinearity in Hyperspectral Imagery Using Surrogate Data Methods. IEEE Trans. Geosci. Remote Sens. 2008, 46, 2840–2847. [Google Scholar] [CrossRef]
- Sun, J.; Fang, W.; Wu, X.; Palade, V.; Xu, W. Quantum-behaved particle swarm optimization: Analysis of individual particle behavior and parameter selection. Evol. Comput. 2012, 20, 349–393. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Cai, Z. Constrained evolutionary optimization by means of (μ + λ)-differential evolution and improved adaptive trade-off model. Evol. Comput. 2011, 19, 249–285. [Google Scholar] [CrossRef] [PubMed]
- Jia, G.; Wang, Y.; Cai, Z.; Jin, Y. An improved (μ + λ)-constrained differential evolution for constrained optimization. Inf. Sci. 2013, 222, 302–322. [Google Scholar] [CrossRef]
- Xu, M.; Du, B.; Zhang, L. Spatial-Spectral Information Based Abundance-Constrained Endmember Extraction Methods. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2014, 7, 2004–2015. [Google Scholar] [CrossRef]
- Chang, C.I.; Plaza, A. A fast iterative algorithm for implementation of pixel purity index. IEEE Geosci. Remote Sens. Lett. 2006, 3, 63–67. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Attributes | SNR | 20 | 30 | 40 | |||
|---|---|---|---|---|---|---|---|
| Methods | RMSE | Time (s) | RMSE | Time (s) | RMSE | Time (s) | |
| PPI | 0.6062 | 3.100 | 0.6069 | 3.365 | 0.6055 | 3.599 | |
| Geometrial-based | N-FINDR | 0.0823 | 1.436 | 0.0263 | 1.522 | 0.0183 | 1.626 |
| VCA | 0.0735 | 0.910 | 0.0232 | 0.936 | 0.0173 | 0.980 | |
| GOP | 0.0784 | 1558.228 | 0.0224 | 1835.942 | 0.0109 | 2212.031 | |
| DPSO | 0.0811 | 1429.519 | 0.0196 | 1701.182 | 0.0115 | 2064.372 | |
| Intelligent-based | ADEE | 0.0809 | 1291.413 | 0.0171 | 1534.217 | 0.0098 | 1727.190 |
| QPSO | 0.0739 | 1357.904 | 0.0157 | 1660.213 | 0.0091 | 1882.512 | |
| IQPSO | 0.0717 | 1332.013 | 0.0138 | 1653.510 | 0.0072 | 1861.607 | |
| ASAEE-GA | 0.0731 | 66.706 | 0.0171 | 70.272 | 0.0095 | 74.264 | |
| ASAEE-based | ASAEE-PSO | 0.0722 | 59.958 | 0.0143 | 62.391 | 0.0080 | 66.220 |
| ASAEE-DE | 0.0697 | 43.331 | 0.0114 | 45.447 | 0.0061 | 47.059 | |
| Attributes | SNR | 20 | 30 | 40 | |||
|---|---|---|---|---|---|---|---|
| Methods | RMSE | Time (s) | RMSE | Time (s) | RMSE | Time (s) | |
| PPI | 0.5132 | 4.522 | 0.5063 | 4.642 | 0.5051 | 4.723 | |
| Geometrial-based | N-FINDR | 0.0805 | 1.995 | 0.0336 | 2.061 | 0.0218 | 2.102 |
| VCA | 0.0711 | 1.236 | 0.0306 | 1.309 | 0.0189 | 1.381 | |
| GOP | 0.0780 | 2050.407 | 0.0295 | 2273.227 | 0.0113 | 2587.485 | |
| DPSO | 0.0802 | 1813.623 | 0.0305 | 2099.171 | 0.0136 | 2392.728 | |
| Intelligent-based | ADEE | 0.0759 | 1472.874 | 0.0273 | 1651.492 | 0.0101 | 1884.253 |
| QPSO | 0.0724 | 1668.131 | 0.0262 | 1891.692 | 0.0098 | 2105.269 | |
| IQPSO | 0.0679 | 1613.092 | 0.0240 | 1810.125 | 0.0082 | 2080.572 | |
| ASAEE-GA | 0.0702 | 74.408 | 0.0273 | 78.559 | 0.0094 | 83.952 | |
| ASAEE-based | ASAEE-PSO | 0.0684 | 67.945 | 0.0265 | 71.623 | 0.0089 | 75.798 |
| ASAEE-DE | 0.0658 | 54.151 | 0.0208 | 58.847 | 0.0075 | 62.801 | |
| Attributes | Endmember | 5 | 10 | 15 | 20 | ||||
|---|---|---|---|---|---|---|---|---|---|
| Methods | RMSE | Time (s) | RMSE | Time (s) | RMSE | Time (s) | RMSE | Time (s) | |
| PPI | 20.7768 | 30.774 | 18.3991 | 42.293 | 16.8536 | 57.495 | 14.3208 | 65.473 | |
| Geometrial-based | N-FINDR | 5.8611 | 26.633 | 4.0298 | 34.205 | 3.8376 | 48.465 | 3.2275 | 59.217 |
| VCA | 5.5463 | 25.495 | 3.8370 | 32.197 | 3.5101 | 43.151 | 2.9383 | 57.542 | |
| GOP | 5.2643 | 1.590 × 10 | 3.8251 | 1.985 × 10 | 3.5212 | 2.308 × 10 | 2.9180 | 2.820 × 10 | |
| DPSO | 4.5321 | 1.373 × 10 | 3.3797 | 1.764 × 10 | 3.0944 | 2.081 × 10 | 2.7488 | 2.556 × 10 | |
| Intelligent-based | ADEE | 4.2970 | 1.24 × 10 | 3.3102 | 1.586 × 10 | 3.0206 | 1.912 × 10 | 2.6831 | 2.401 × 10 |
| QPSO | 4.1542 | 1.270 × 10 | 3.1326 | 1.600 × 10 | 2.9437 | 2.005 × 10 | 2.6704 | 2.493 × 10 | |
| IQPSO | 4.0720 | 1.258 × 10 | 3.0327 | 1.581 × 10 | 2.7794 | 1.990 × 10 | 2.5925 | 2.451 × 10 | |
| ASAEE-GA | 4.3364 | 954.296 | 3.4417 | 1309.780 | 3.1561 | 1613.094 | 2.7436 | 1940.092 | |
| ASAEE-based | ASAEE-PSO | 4.0862 | 826.323 | 3.1058 | 1198.461 | 2.8456 | 1436.977 | 2.6024 | 1805.624 |
| ASAEE-DE | 3.7321 | 751.325 | 2.8469 | 984.226 | 2.5564 | 1318.374 | 2.2613 | 1705.950 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Li, J.; Liu, Y.; Xie, F.; Li, P. An Adaptive Surrogate-Assisted Endmember Extraction Framework Based on Intelligent Optimization Algorithms for Hyperspectral Remote Sensing Images. Remote Sens. 2022, 14, 892. https://doi.org/10.3390/rs14040892
Wang Z, Li J, Liu Y, Xie F, Li P. An Adaptive Surrogate-Assisted Endmember Extraction Framework Based on Intelligent Optimization Algorithms for Hyperspectral Remote Sensing Images. Remote Sensing. 2022; 14(4):892. https://doi.org/10.3390/rs14040892
Chicago/Turabian StyleWang, Zhao, Jianzhao Li, Yiting Liu, Fei Xie, and Peng Li. 2022. "An Adaptive Surrogate-Assisted Endmember Extraction Framework Based on Intelligent Optimization Algorithms for Hyperspectral Remote Sensing Images" Remote Sensing 14, no. 4: 892. https://doi.org/10.3390/rs14040892