
Analysis of Precise Orbit Determination of BDS-3 MEO and IGSO Satellites Based on Several Dual-Frequency Measurement Combinations

Innovation Academy for Precision Measurement Science and Technology, Chinese Academy of Sciences, West No.30 Xiao Hong Shan, Wuhan 430071, China
*
Author to whom correspondence should be addressed.
Remote Sens. 2022, 14(23), 6030; https://doi.org/10.3390/rs14236030
Submission received: 15 October 2022
/
Revised: 24 November 2022
/
Accepted: 26 November 2022
/
Published: 28 November 2022
(This article belongs to the Special Issue Precision Orbit Determination of Satellites)
Abstract
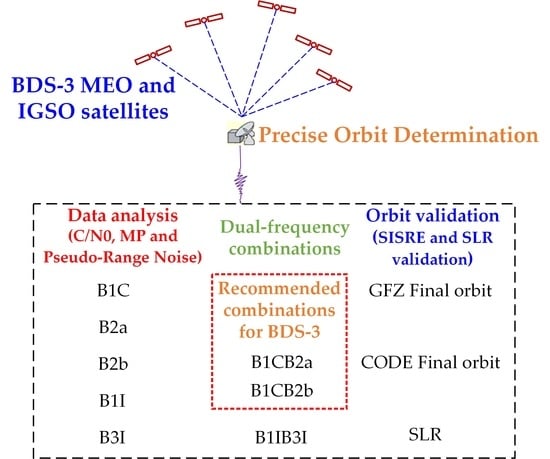
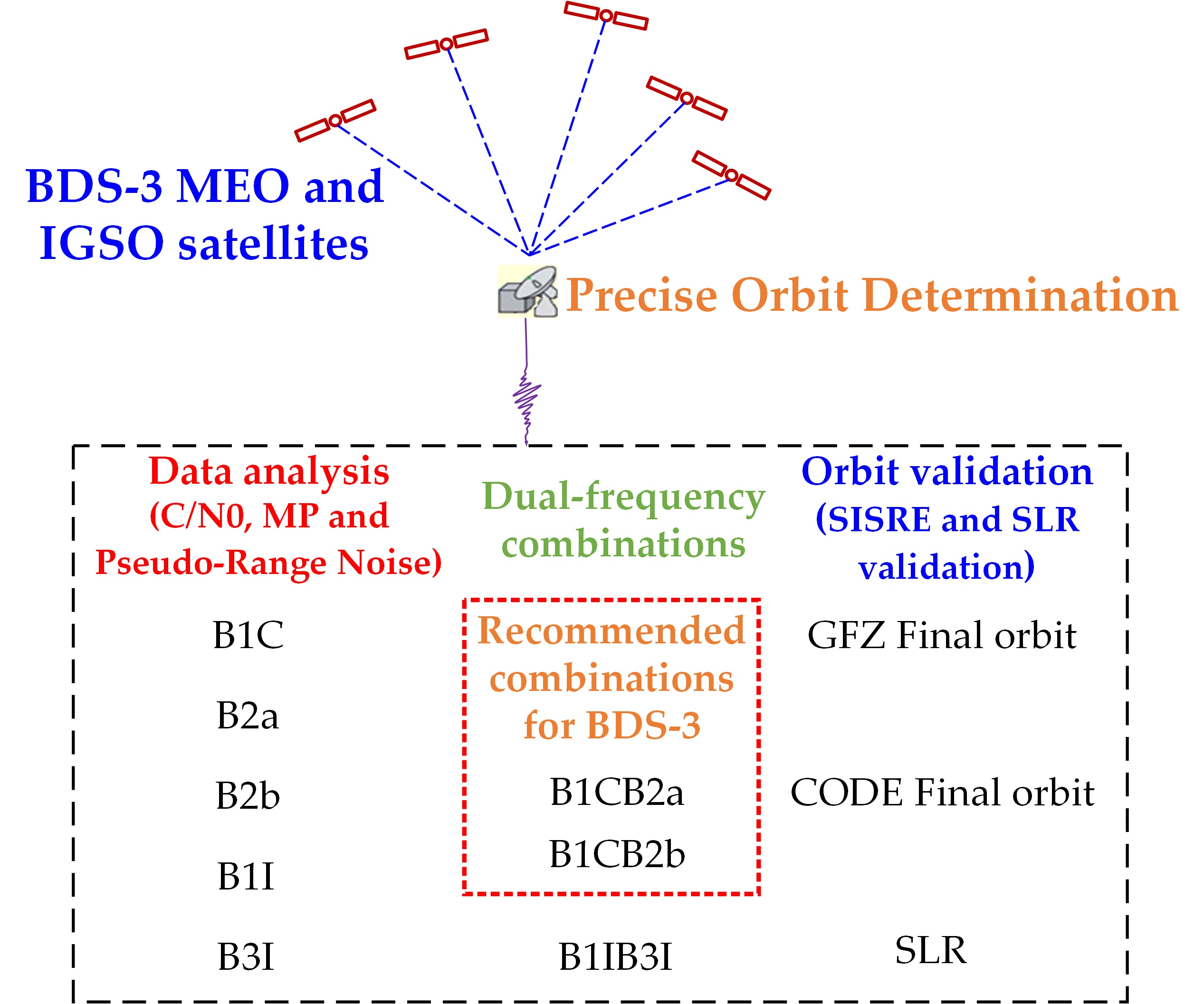
:The Chinese BeiDou-3 navigation satellite system (BDS-3) is capable of transmitting both old B1I, B3I signals and new B1C, B2a, B2b signals. Current BDS-3 precise orbits are generally calculated using a B1I/B3I combination considering overlap with the BeiDou-2 navigation satellite system (BDS-2). In this contribution, the observation quality of BDS-3 medium earth orbit (MEO) satellites and inclined geosynchronous orbit (IGSO) satellites are analyzed based on three aspects, i.e., carrier to noise ratio (C/N0), pseudo-range noise and pseudo-range multipath (MP). The C/N0 of the MEO satellite is 2~3 dB higher than that of the IGSO satellite at the same elevation angle. Meanwhile, the order of the Root Mean Square (RMS) values of both pseudo-range noise and MP is B1I < B1C < B3I < B2a ≈ B2b. Three kinds of combinations, i.e., B1CB2a, B1CB2b and B1IB3I, are selected for the BDS-3 precise orbit determination (POD) experiment. Orbits are assessed by the orbit-only signal-in-space range error (SISRE) computed between pairs of the three kinds of combinations in this contribution, CODE and GFZ final orbits. Orbit-only SISRE assessment shows that B1CB2a/CODE, B1CB2b/CODE, B1CB2a/GFZ and B1CB2b/GFZ are at the same level with CODE/GFZ, and the orbit-only SISRE is at the level of 5 cm for MEOs and 9 cm for IGSOs, respectively. Meanwhile, B1IB3I/CODE and B1IB3I/GFZ are about 1–2 cm worse. Inter-solution comparison between B1CB2a, B1CB2b and B1IB3I also indicate that B1CB2a and B1CB2b have good consistency, while B1IB3I shows poor performance. Satellite laser ranging (SLR) residuals indicate that the mean RMS is 3–4 cm for the four BDS-3 MEOs for CODE final orbit, GFZ final orbit, B1CB2a and B1CB2b combinations, while the mean RMS value for B1IB3I combination is a few millimeters worse, at approximately 4–5 cm.
1. Introduction
BDS-3 has been providing global services since Mid-2020 [1,2,3]. The operational status of the BDS-3 constellation is summarized in Table 1, as of October 2022. In addition to old B1I and B3I signals, BDS-3 satellites have been transmitting newly designed B1C, B2a and B2b signals [4], which are interoperable and compatible with the L1C/L5 frequencies of the global positioning system (GPS) and E1/E5 frequencies of European Galileo Navigation Satellite System (Galileo). These multi-frequencies bring forward the prospect for improving the performance of BDS3 POD. Yan et al. [5] demonstrated that the BDS-3 B1C signal has a lower C/N0 than B2a signal, which presents the same level compared with B1I or B3I signal. Zhang et al. [6] analyzed and reported that the observation noises of B1C and B2a are better than B1I. Based on nine Multi-GNSS pilot projects (MGEX) of the International GNSS Service (IGS), Li et al. [7] demonstrated that the POD result of BDS-3 satellites (C19-C37) in the B1C/B2a combination is preferable to the B1I/B3I combination.
High-accuracy satellite orbit is the core technology for the operation and application of BDS. During the construction of BDS-2, analysis centers (ACs) of the International GNSS Monitoring and Assessment System (iGMAS), Center for Orbit Determination in Europe (CODE), Deutsches GeoForschungsZentrum (GFZ) and Technical University of Munich (TUM) have carried out much detailed research on POD of BDS-2. Montenbruck et al. [8] reported that the SLR residuals of the MGEX BDS-2 orbits were 5, 10 and 50 cm for MEOs, IGSOs, and GEOs, respectively. For BeiDou-3 experimental (BDS-3e) satellites, Tan et al. [9] reported the POD results of BDS-3e and BDS-2 based on 9 iGMAS stations, and SLR residuals demonstrated that the orbit radial component were 10 cm and 40 cm for the BDS-3e IGSO and MEO satellites, respectively. For BDS-3 satellites, based on 100 MGEX and iGMAS stations, Xu et al. [10] demonstrated that the SLR residual of the BDS-3 orbits was 4–6 cm. Meanwhile, several authors [11,12,13,14,15] have studied the BDS-3 POD based on inter-satellite links (ISLs), but ISL data are not used in the orbit product generation due to insufficient data openness.
As the inheritor of the multi-GNSS experiment established by the IGS, the MGEX has established a global observation network capable of collecting multi-GNSS signals. Currently, five MGEX ACs, i.e., CODE, Shanghai Astronomical Observatory (SHAO, CAS), GFZ, Information and Analysis Center (IAC) and Wuhan University (WHU) have been offering multi-GNSS orbits with BDS-3 included [16,17,18,19,20]. Steigenberger et al. [21] have conducted an orbit consistency analysis and SLR analysis of the five MGEX Acs. It should be noticed that the B1I/B3I combination is widely used in the BDS-3 product solution among these ACs, in consideration of the overlap with BDS-2 [22,23,24].
Due to the limited amount of tracking stations supporting the BDS-3 new B1C, B2a and B2b signals, and consideration for the compatibility with BDS-2, current BDS-3 POD research work and orbit products are restricted to the old B1I/B3I combination. There is little research on POD of the BDS-3 constellation based on different dual-frequency measurement combinations, especially B2b signal [25,26,27,28], and there is still limited research on observation quality analysis of BDS-3 new signals, especially the B2b signal [29,30,31]. We need to investigate the observation quality of BDS-3 operational signals, i.e., B1C, B2a, B2b, B1I and B3I. We should also analyze the BDS-3 satellite POD performance based on new B1C, B2a and B2b combinations by comparing with the old B1IB3I combination. In this contribution, POD of BDS-3 satellites based on several dual-frequency measurement combinations are presented.
The algorithm for observation quality analysis with C/N0, pseudo-range noise and pseudo-range MP, the MGEX tracking stations used to estimate the BDS-3 orbits and the POD procedure are shown in Section 2. Meanwhile, orbits are validated by the orbit-only SISRE computed between B1CB2a combination, B1CB2b combination, B1IB3I combination, CODE and GFZ final orbits. Moreover, SLR validation is conducted. The corresponding results are shown and investigated in Section 3. Finally, some key aspects are further discussed and a conclusion is formed in the last Section.
2. Methods
2.1. MGEX Tracking Network
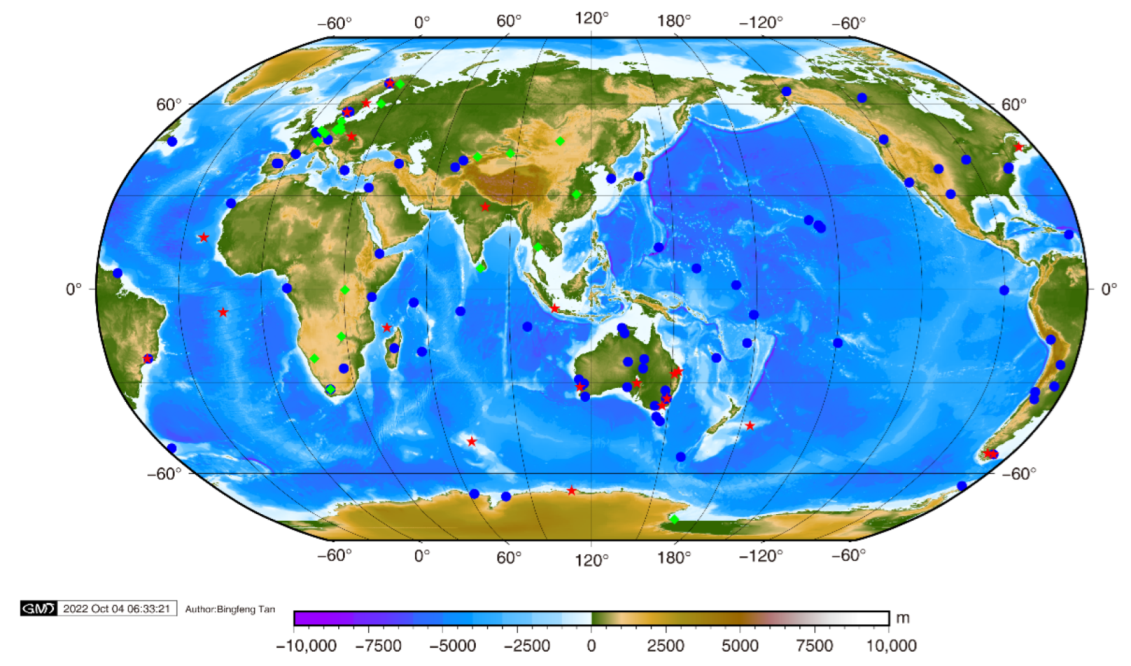
As of the middle of 2022, the MGEX tracking network contains about 520 stations, more than 300 of them are capable of tracking BDS. However, not of all these stations are applicable for BDS satellite POD, mainly due to deficiency of frequencies or pseudo-random noise (PRN) number supporting capability. Based on the statistics of multi-GNSS observations during July 2022 from the Crustal Dynamics Data Information System (CDDIS) [32], 129 MGEX stations with the capability of tracking all BDS-3 B1I, B3I, B1C, B2a and B2b signals are recognized and selected for the BDS-3 satellite POD experiment, and Figure 1 demonstrates the station distribution. One month observations from 1 July 2022 to 31 July 2022 are selected for the POD experiment.
2.2. Tracking Data Analysis Algorithm
The quality of observations is the footstone of BDS-3 POD. The following is a brief description of some indices commonly used in tracking data quality analysis.
- (1)
- C/N0 analysis
C/N0 is mainly affected by parameters of antenna gain, multipath and the condition of correlator in receiver. It is an index reflecting the quality of carrier phase observations. C/N0 can be obtained through the observations [33,34,35,36,37].
- (2)
- Pseudo-range MP analysis
When the GNSS observation signal is received by a station, it will generate a variety of reflected signals due to the interference of the surrounding environment, making the received signal deviate from true value, which is called MP. Compared with pseudo-range MP, carrier phase MP is negligible. The pseudo-range MP can be expressed as:
where and are frequency band with the value, , and are the observations of pseudo-range and carrier phase, is the wavelength of frequency, contains the linear combination of the phase ambiguities and the constant part of the hardware delays which can be obtained with the mean value within a continuous observation arc [38].
- (3)
- Pseudo-range noise analysis
The pseudo-range noise can be expressed with difference between pseudo-range and carrier phase observations (code minus carrier phase, CC). Considering the high accuracy of carrier phase observations, the phase multipath is negligible, then CC can be expressed as follows.
2.3. POD Strategy of BDS-3 Satellite Based on Several Dual-Frequency Measurement Combinations
Important aspects and detailed description regarding GFZ solution, CODE solution, B1CB2a, B1CB2b and B1IB3I combinations in this contribution are summarized in Table 2.
The Bernese GNSS Software version 5.2, developed by CODE, has been updated to support BDS-3 POD in this contribution. Similar to Galileo MEOs which hold a rectangular shape, ECOM is not capable of appropriately modeling the solar radiation pressure for BDS-3 satellites. Hence, the same as CODE AC, ECOM-2 is used in this contribution.
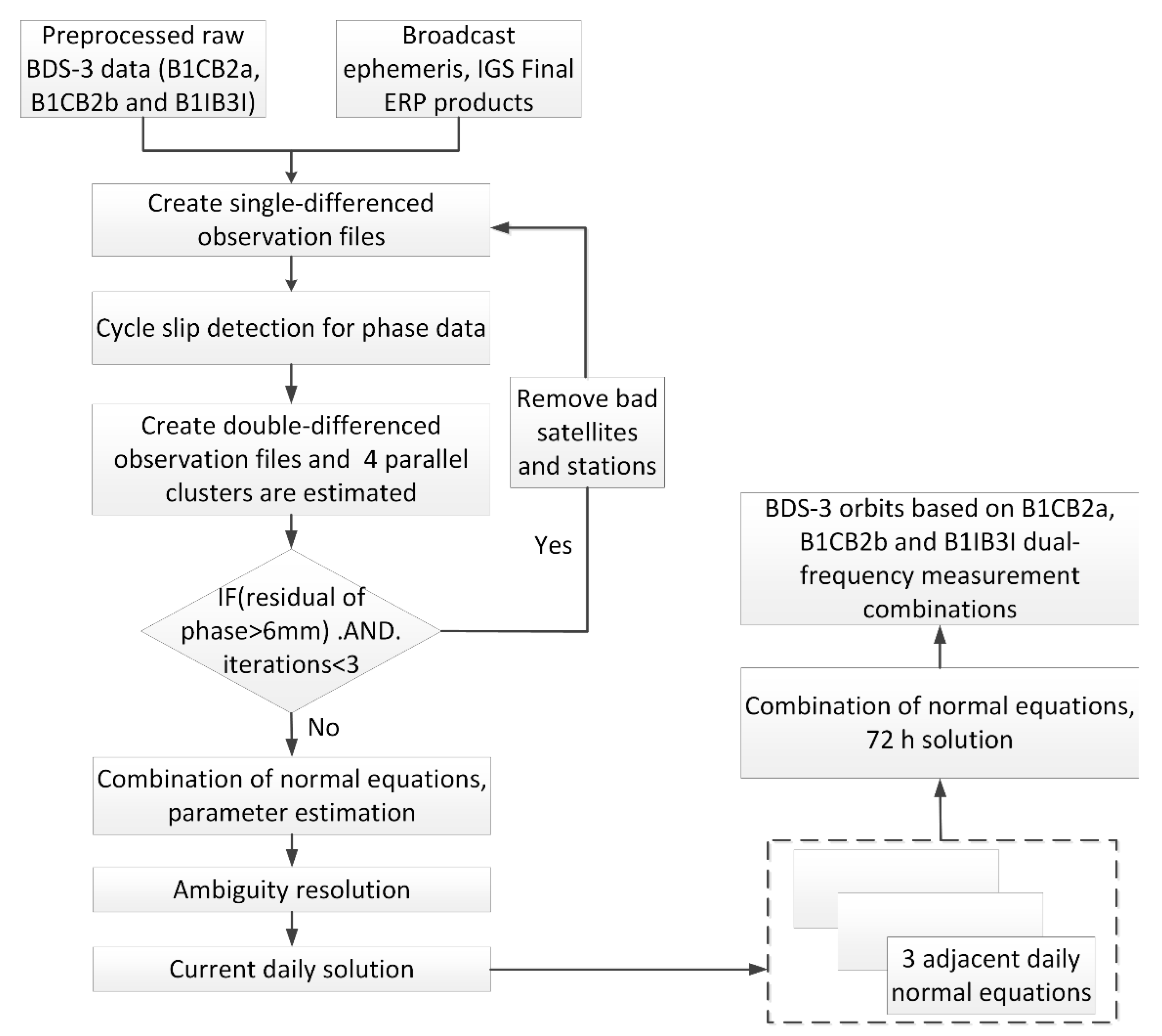
Five signals of BDS-3 have been chosen, and three types of dual-frequency measurement combinations, i.e., B1CB2a, B1CB2b and B1IB3I are employed in BDS-3 POD processing. It should be emphasized that, except for the different signals used, other strategies are the same for BDS-3 POD based on B1CB2a, B1CB2b and B1IB3I combinations in this contribution. The BDS-3 POD procedure based on B1CB2a, B1CB2b and B1IB3I combinations are summarized in Figure 2. For GFZ and CODE final orbits, only B1IB3I combination is used, considering the compatibility with BDS-2.
3. Results
3.1. Tracking Data Analysis
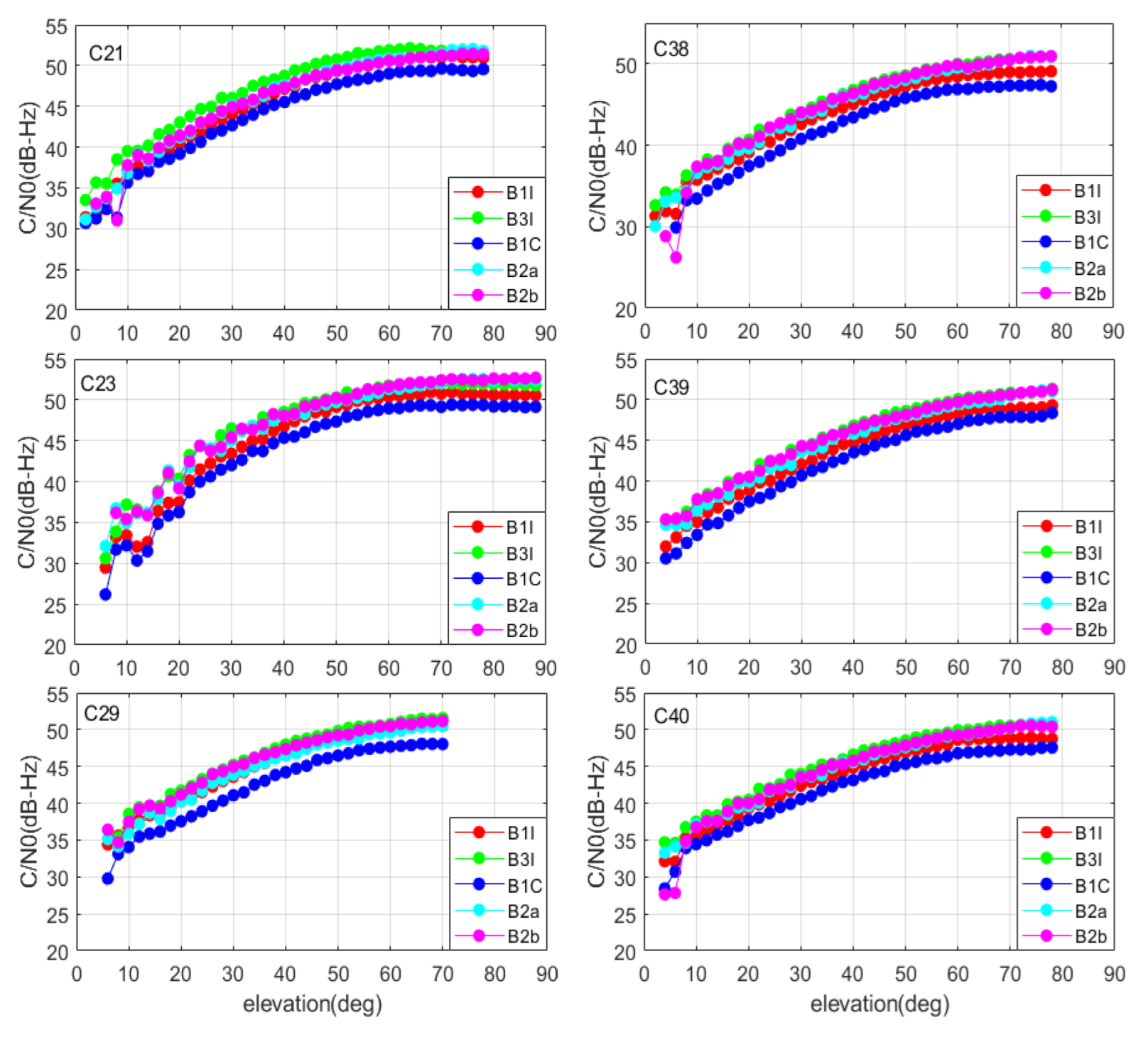
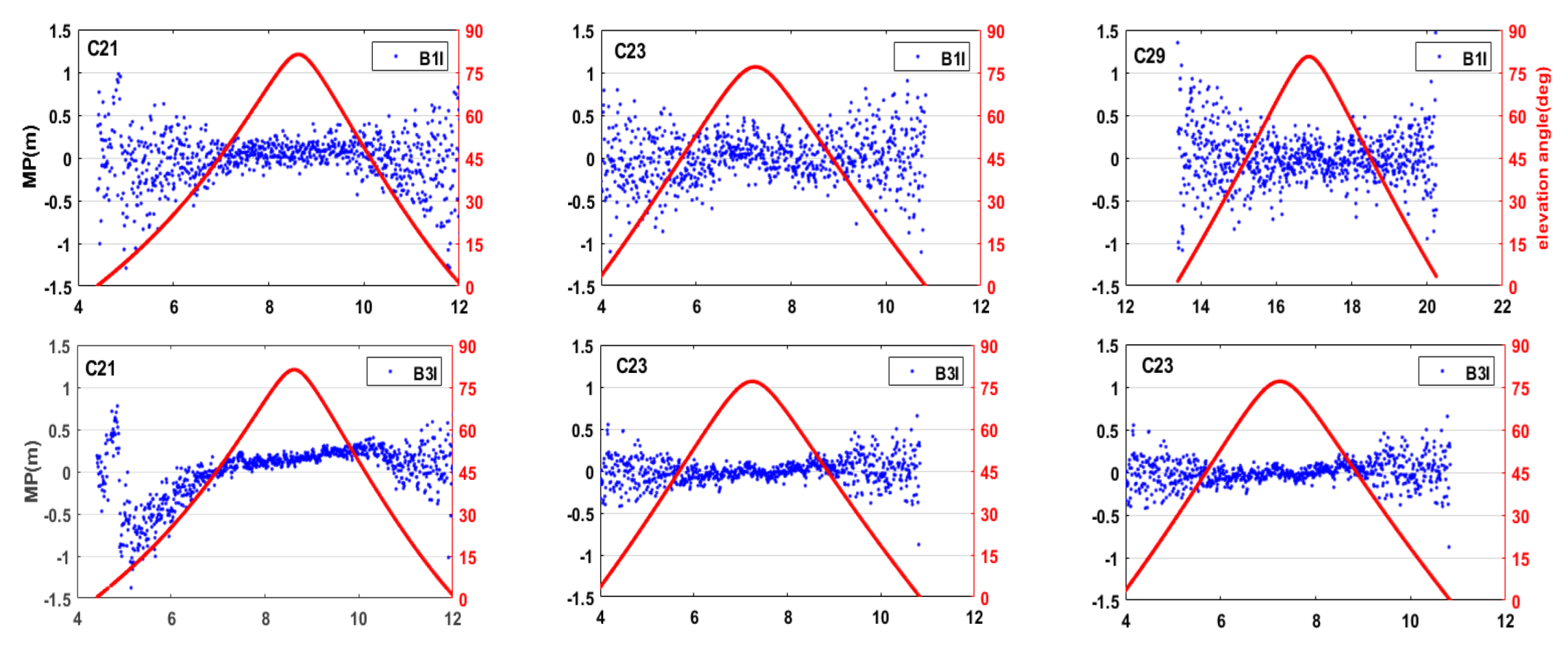
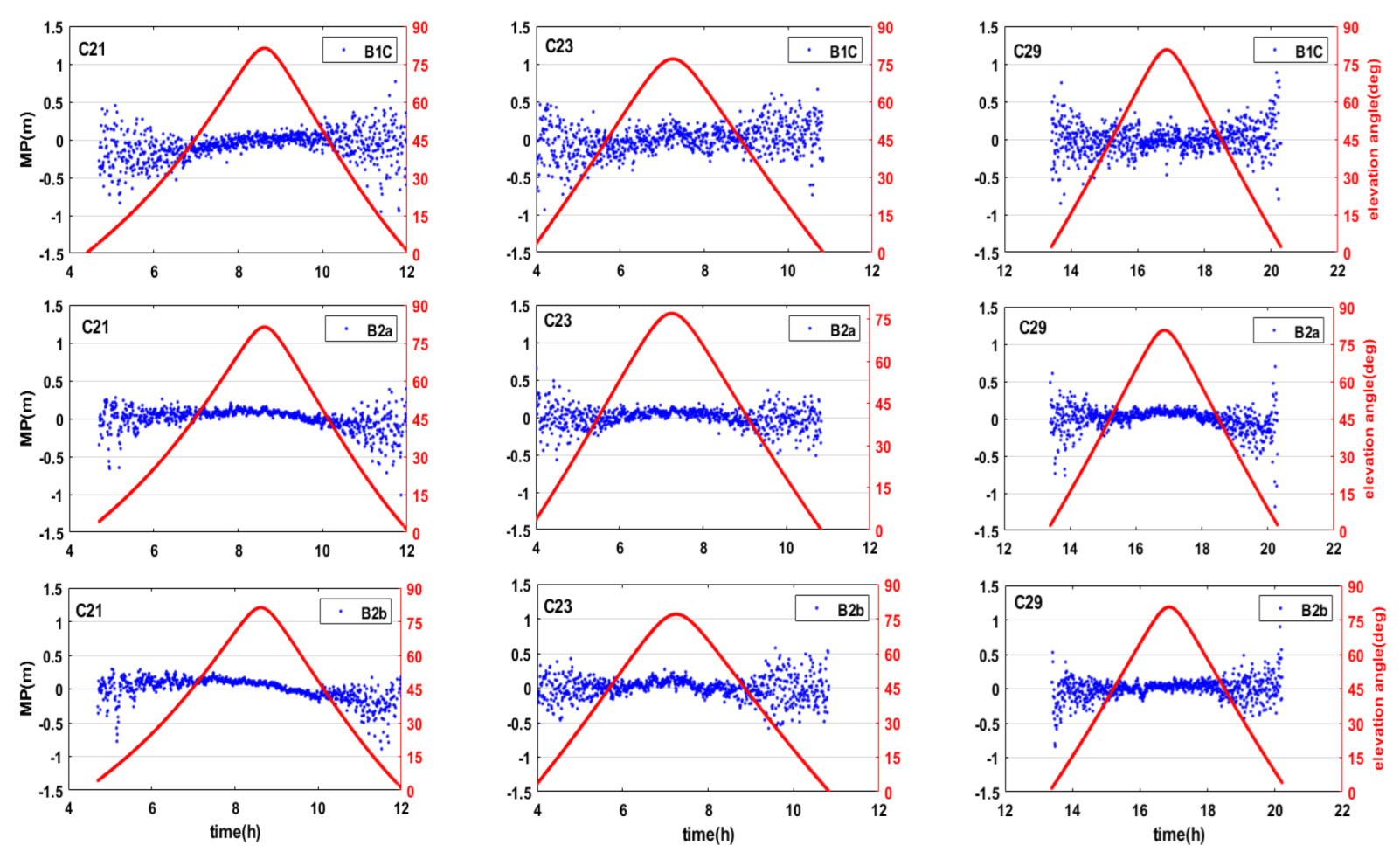
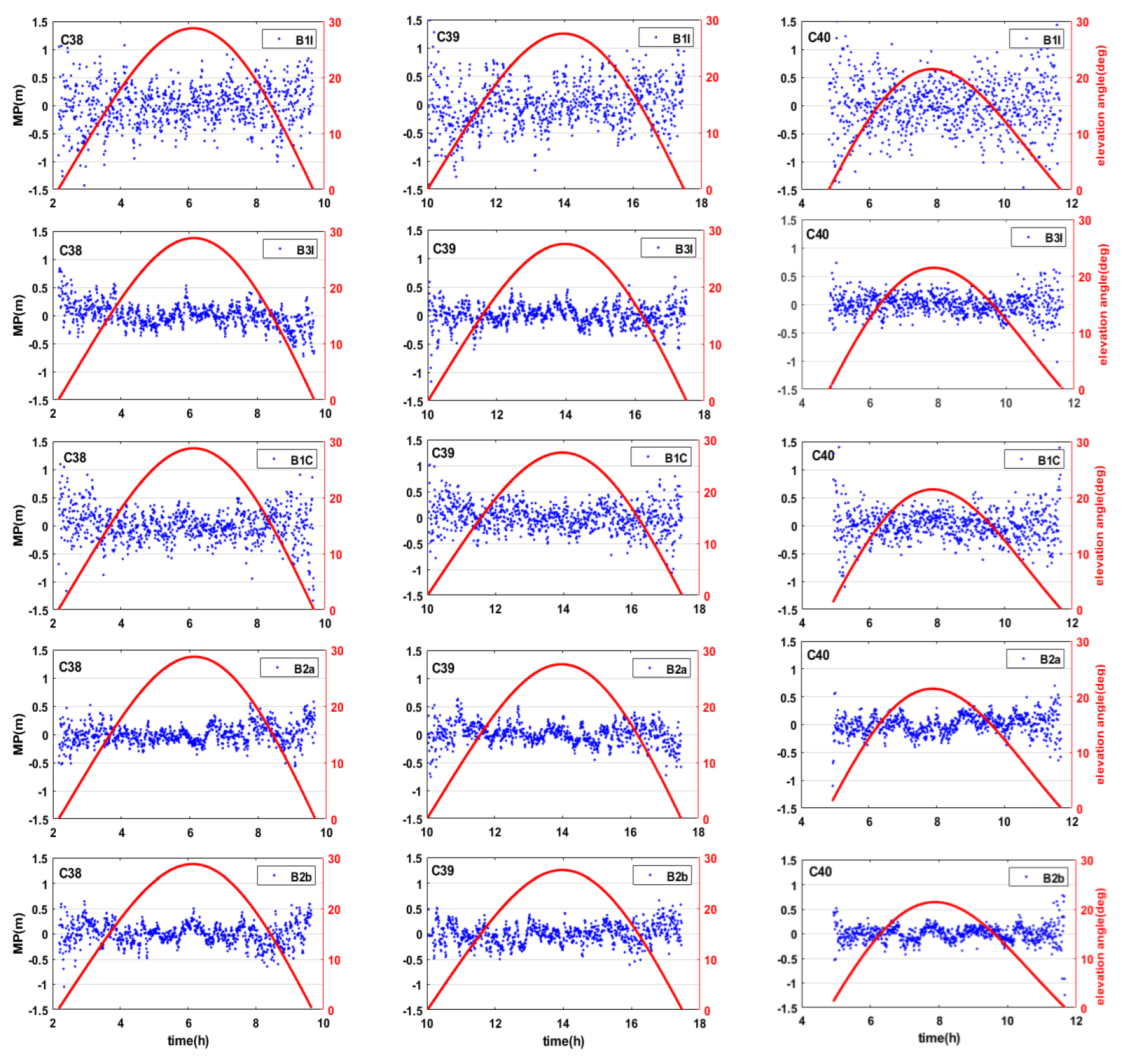
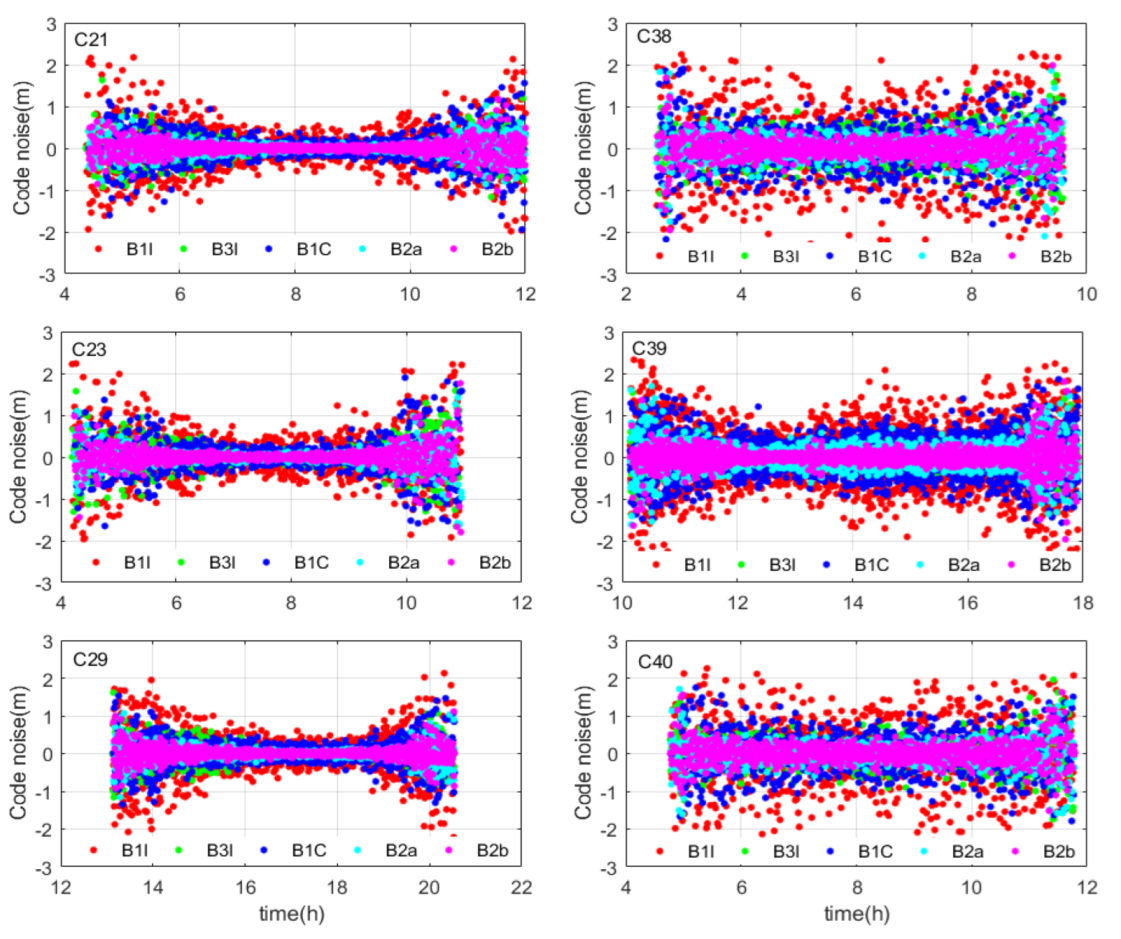
Considering the periodicity of POD, a week’s (25 July 2022 to 31 July 2022) MGEX tracking data are adopted for analysis. A typical representative of BDS-3 MEOs (C21, C23, C29) and IGSOs (C38, C39, C40) detail tracking data analysis are displayed in Figure 3, Figure 4, Figure 5 and Figure 6 and all the BDS-3 satellite statistical information is listed in Table 3.
- (1)
- C/N0 analysis
As in Figure 3, the C/N0 of each frequency varies at the same level of 30 dB to 55 dB, and the C/N0 tends to be stable when the elevation angle reaches 60 degrees. The C/N0 of MEO satellite is 2~3 dB larger than that of IGSO at the same elevation angle. This may be caused by the higher orbital height and the lower satellite transmission power of the IGSO satellite. The correlation trend of C/N0 between each frequency point and the elevation angle is almost the same. Both the C/N0 of MEO and IGSO has the same sort of B3I > B2b > B2a > B1I > B1C.
- (2)
- Pseudo-range MP analysis
As in Figure 4 and Figure 5 and Table 3, the MP of the MEO satellite has systematic variation at each frequency. With the increase in elevation angle, the MP becomes smaller, and it tends to be stable while the elevation angle is greater than 50 deg. The MP of IGSOs shows no obvious systematic variation with elevation angle. The average MP of MEOs is obviously smaller than that of IGSOs, which may be due to the large number of low elevation angles during the IGSO satellite observation period. In general, the MP trend of MEOs and IGSOs have the same sort of B1I > B1C > B3I > B2a ≈ B2b, and all the MPs fluctuate within ±0.5 m.
- (3)
- Pseudo-range noise analysis
As in Figure 6 and Table 3, the pseudo-range noise of B1C is much larger than that of B2a. Based on the statistical results, it can also be discovered that the noise of B1C is 0.3 m and 0.24 m for IGSOs and MEOs, which is larger than that of a B2a signal with 0.21 m and 0.18 m for IGSOs and MEOs, respectively. The pseudo-range noise of B3I is significantly better than B1I, and the noise of these two signals are in the range of 0.2~0.4 m. Meanwhile, the noise of B3I and B1I is slightly worse than B2a, while the noise of B2a is almost equal to B2b which is in the range of 0.18~0.22 m. For BDS-3, the pseudo-range noise accuracies of MEOs are better than those of IGSOs, which may be because IGSOs have a large proportion of low elevation angle observation periods, resulting in more pseudo-range noise. Overall, pseudo-range measurement accuracy is in the following order: B2b ≈ B2a > B3I > B1C > B1I.
3.2. Orbit Quality
The SISRE [42,43] is widely adopted for the quality validation of satellite ephemerides and can also be adapted to assess the consistency of orbit and clock products from different agencies with similar precision. In this contribution, the SISRE computed between B1CB2a combination, B1CB2b combination, B1IB3I combination, CODE and GFZ final orbits are used for orbit precision validation. Meanwhile, SLR validation is used for orbit accuracy assessment. The POD assessment spans from 1 July 2022 to 31 July 2022.
3.2.1. Orbit-Only SISRE
The orbit and clock SISRE are obtained as follows:
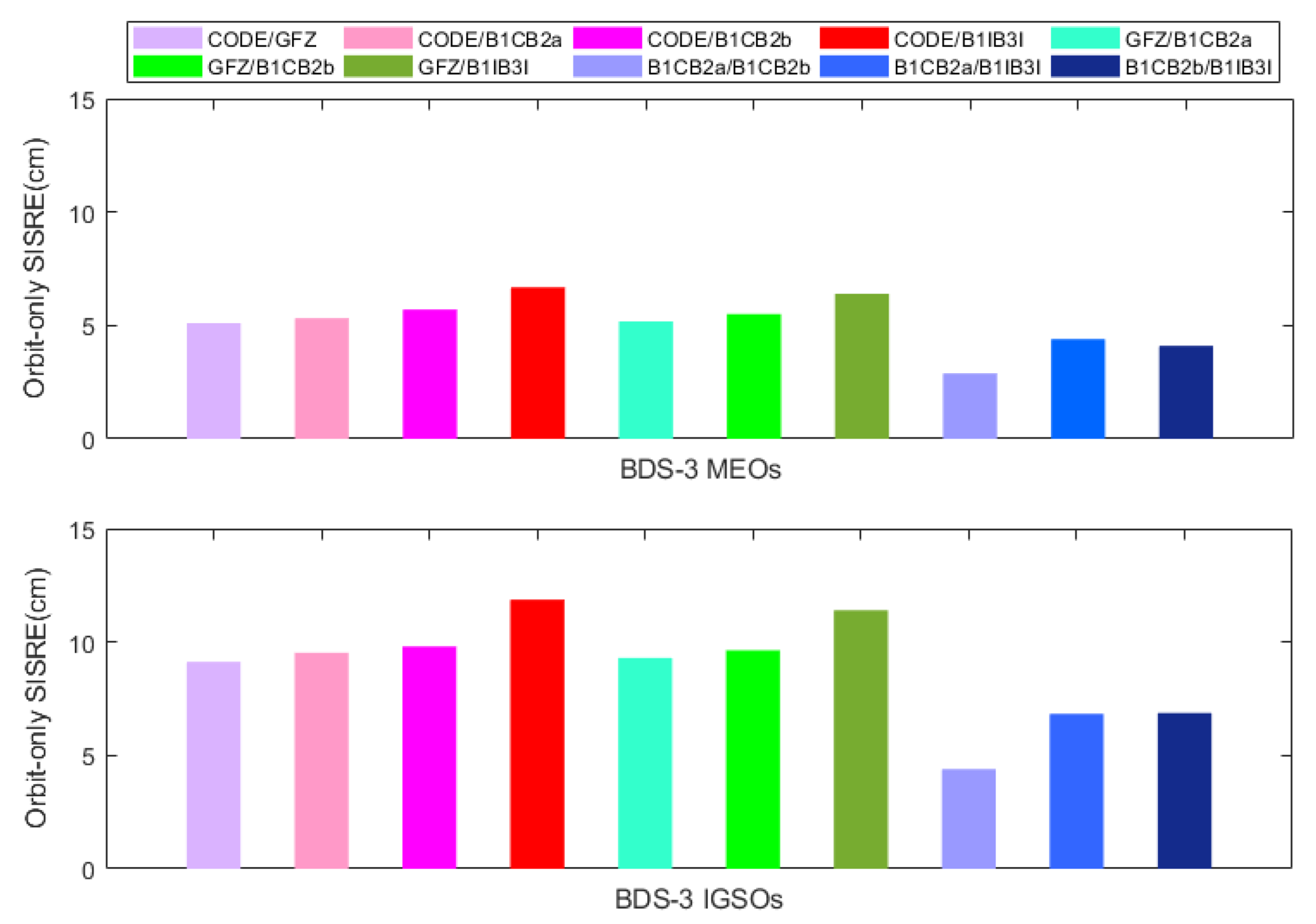
where R, A and C represent the satellite orbit difference in radial, along-track and cross-track directions, respectively. T denotes the satellite clock difference, and orbit-only SISRE can be obtained by setting T to zero. Meanwhile, Montenbruck et al. [42] published the recommended value of and in Table 4 of the paper, and the value is adopted in this contribution for our orbit-only SISRE investigation. Table 4 and Figure 7 illuminate the orbit-only SISRE for BDS-3 MEOs and IGSOs computed between B1CB2a combination, B1CB2b combination, B1IB3I combination, CODE and GFZ final orbits.
In Figure 7, CODE/GFZ represents the orbit-only SISRE between CODE orbit and GFZ orbit. Meanwhile, CODE/B1CB2a, CODE/B1C2b and CODE/B1IB3I stand for the orbit-only SISRE between CODE orbit and dual-frequency measurement combinations in this contribution. Similarly, GFZ/B1CB2a, GFZ/B1C2b and GFZ/B1IB3I stand for the orbit-only SISRE between GFZ orbit and dual-frequency measurement combinations. Finally, B1CB2a/B1CB2b, B1CB2a/B1IB3I and B1CB2b/B1IB3I symbolize internal orbit-only SISRE comparison results for the three dual-frequency measurement combinations.
For external consistency comparison with CODE and GFZ final orbits, B1CB2a/CODE, B1CB2b/CODE, B1CB2a/GFZ and B1CB2b/GFZ are at the same level as CODE/GFZ, the orbit-only SISRE approximately 5 cm for MEOs and 9 cm for IGSOs, respectively. Meanwhile, B1IB3I/CODE and B1IB3I/GFZ are about 1–2 cm worse for both MEOs and IGSOs, at approximately 6 cm for MEOs and 11 cm for IGSOs, respectively. For internal coincidence comparison, the consistency of B1CB2a/B1CB2b is also superior to that of the B1CB2a/B1IB3I and B1CB2b/B1IB3I combinations. Moreover, the orbit-only SISRE for IGSOs is significantly larger than that of the MEOs, mainly due to the ground tracking station coverage for these IGSOs and SRP modelling difficulties caused by large communication antennas.
3.2.2. SLR Residuals
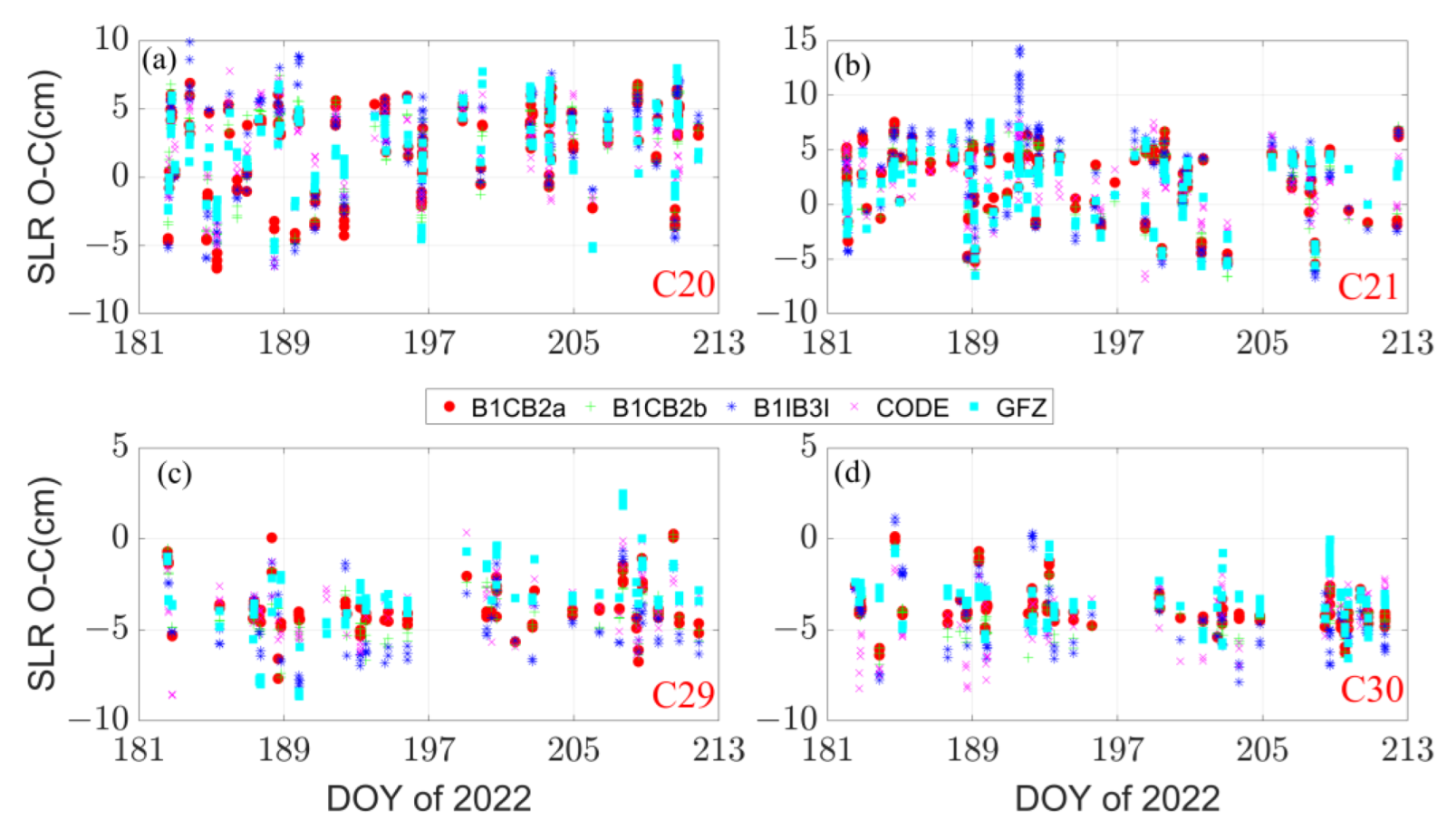
To further investigate the orbit accuracy of BDS-3 POD solutions, SLR tracking data has been used to assess the orbits. Two BDS-3 MEOs (C20/M2, C21/M3) manufactured by CAST and two BDS-3 MEOs (C29/M9, C30/M10) manufactured by SECM are regularly observed by the International Laser Ranging Service (ILRS) [44]. The system eccentricities and station coordinates are updated and fixed to SLRF2014, and the retro-reflector offsets of the MEOs are given by CSNO [45]. SLR observations from 1 July 2022 to 31 July 2022 collected by ILRS have been processed. The statistics of the SLR validation is demonstrated in Table 5 and shown in Figure 8.
The SLR validation results basically coincide with the orbit-only SISRE investigation. For CODE, GFZ, B1CB2a and B1CB2b solutions, the mean RMS of SLR residuals are 3–4 cm and the mean values are approximately 2 cm and −4 cm for CAST and SECM satellites, respectively. Meanwhile, the mean RMS of B1IB3I solution is a few millimeters worse, which is approximately 4–5 cm. Moreover, mean values of SLR residuals for BDS-3 CAST and SECM satellites point to remaining deficiencies in BDS-3 satellite empirical solar radiation pressure modelling.
4. Conclusions
In the literature, many studies expounded the BDS-3 POD based on B1I/B3I combination, and few works analyzed BDS-3 POD based on all of the new signals. In this contribution, the observation quality of BDS-3 MEOs and IGSOs is analyzed. This indicates that C/N0 of MEO satellite is 2~3 dB higher than that of IGSO satellite at the same elevation angle. Meanwhile, the pseudo-range MP and noise for all operational signals of BDS-3 satellites are better than IGSO due to the lower satellite transmission power and the low elevation angle observation period. The overall observation quality of BDS-3 MEOs and IGSOs in each frequency is B1I < B1C < B3I < B2a ≈ B2b.
One month of observations from 129 MGEX stations are processed for BDS-3 POD based on three different combinations, i.e., B1CB2a, B1CB2b and B1IB3I. The inter-agency consistency is assessed by orbit-only SISRE comparison between B1CB2a combination, B1CB2b combination, B1IB3I combination, CODE and GFZ final orbits. The B1CB2a and B1CB2b combinations are superior to the B1IB3I combination when compared with CODE or GFZ final orbits. Orbit-only SISRE for B1CB2a/CODE, B1CB2b/CODE, B1CB2a/GFZ, B1CB2b/GFZ and CODE/GFZ is approximately 5 cm for MEOs and 9 cm for IGSOs, respectively. Meanwhile, B1IB3I/CODE and B1IB3I/GFZ are about 1–2 cm worse. Comparison between B1CB2a, B1CB2b and B1IB3I also indicates that B1CB2a and B1CB2b have good consistency, while B1IB3I shows poor performance. Moreover, the performance of IGSOs is significantly worse than that of MEOs due to the geographical distribution of ground tracking stations and SRP modelling problems which should be further investigated. As for the orbit accuracy investigation by the SLR technique, result is in good agreement with the orbit-only SISRE assessment. For CODE orbit, GFZ orbit, B1CB2a and B1CB2b solutions, the mean RMS is 3–4 cm and the mean values are approximately 2 cm and −4 cm for CAST and SECM satellites, respectively. As for B1IB3I solution, the mean RMS value is a few millimeters worse, which is approximately 4–5 cm. Moreover, mean values of SLR residuals for BDS-3 CAST and SECM satellites also demonstrate that deficiencies still exist in BDS-3 satellite empirical SRP modelling, i.e., ECOM and ECOM-2.
In summary, the BDS-3 new signals such as B1C, B2a, and B2b are significantly better than the old B1I and B3I signals not only in observation quality but also in POD performance. We recommend using B1CB2a or B1CB2b combinations for BDS-3 POD, and BDS-2 can be handled as an individual constellation using the B1IB3I combination.
Author Contributions
Conceptualization, writing—original draft preparation, writing—review and editing and methodology, B.T., Y.Y. and Q.A.; software, B.T.; validation, Q.A.; data curation, B.T. and Q.A.; formal analysis, Y.Y. and Q.A.; funding acquisition, B.T. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Natural Science Foundation of China (Grant No. 42004022).
Data Availability Statement
Our sincere thanks go to the International GNSS Monitoring and Assessment System (iGMAS) and the Crustal Dynamics Data Information System (CDDIS), Chinese Meridian Project for providing GNSS data; Center for Orbit Determination in Europe (CODE) and Deutsches GeoForschungsZentrum (GFZ) for providing multi-GNSS final orbit products; EUROLAS Data Center (EDC) for providing SLR tracking data.
Acknowledgments
We thank the Astronomical Institute of the University of Bern (AIUB) for providing Bernese GNSS Software version 5.2 and School of Ocean and Earth Science and Technology at University of Hawai’i System for providing GMT Software.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Yang, Y.; Gao, W.; Guo, S.; Mao, Y.; Yang, Y. Introduction to BeiDou-3 navigation satellite system. Navigation 2019, 66, 7–18. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Mao, Y.; Sun, B. Basic performance and future developments of BeiDou global navigation satellite system. Satell. Navig. 2020, 1, 1. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Xu, Y.; Li, J.; Yang, C. Progress and performance evaluation of BeiDou global navigation satellite system: Data analysis based on BDS-3 demonstration system. Sci. China Earth Sci. 2018, 61, 614–624. [Google Scholar] [CrossRef]
- Lu, M.; Li, W.; Yao, Z.; Cui, X. Overview of BDS III new signals. Navigation 2019, 66, 19–35. [Google Scholar] [CrossRef] [Green Version]
- Yan, X.; Huang, G.; Zhang, Q.; Liu, C.; Wang, L.; Qin, Z. Early analysis of precise orbit and clock offset determination for the satellites of the global BeiDou-3 system. Adv. Space Res. 2019, 63, 1270–1279. [Google Scholar] [CrossRef]
- Zhang, B.; Jia, X.; Sun, F.; Xiao, K.; Dai, H. Performance of BeiDou-3 satellites: Signal quality analysis and precise orbit determination. Adv. Space Res. 2019, 64, 687–695. [Google Scholar] [CrossRef]
- Li, R.; Wang, N.; Li, Z.; Zhang, Y.; Wang, Z.; Ma, H. Precise orbit determination of BDS-3 satellites using B1C and B2a dual-frequency measurements. GPS Solut. 2021, 25, 95. [Google Scholar] [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Prange, L.; Deng, Z.; Zhao, Q.; Perosanz, F.; Romero, I.; Noll, C.; Stürze, A.; Weber, G. The Multi-GNSS Experiment (MGEX) of the International GNSS Service (IGS)–achievements, prospects and challenges. Adv. Space Res. 2017, 59, 1671–1697. [Google Scholar] [CrossRef]
- Tan, B.; Yuan, Y.; Wen, M.; Ning, Y.; Liu, X. Initial results of the precise orbit determination for the new-generation BeiDou satellites (BeiDou-3) based on the iGMAS network. ISPRS Int. J. Geo-Inf. 2016, 5, 196. [Google Scholar] [CrossRef] [Green Version]
- Xu, X.; Wang, X.; Liu, J.; Zhao, Q. Characteristics of BD3 global service satellites: POD, open service signal and atomic clock performance. Remote Sens. 2019, 11, 1559. [Google Scholar] [CrossRef]
- Cinelli, M.; Ortore, E.; Laneve, G.; Circi, C. Geometrical approach for an optimal inter-satellite visibility. Astrodynamics 2021, 5, 237–248. [Google Scholar] [CrossRef]
- Kai, X.; Chunling, W.; Liangdong, L. Autonomous navigation for a group of satellites with star sensors and inter-satellite links. Acta Astronaut. 2013, 86, 10–23. [Google Scholar] [CrossRef]
- Wang, C.; Zhao, Q.; Guo, J.; Liu, J.; Chen, G. The contribution of intersatellite links to BDS-3 orbit determination: Model refinement and comparisons. Navigation 2019, 66, 71–82. [Google Scholar] [CrossRef] [Green Version]
- Xie, X.; Geng, T.; Zhao, Q.; Lv, Y.; Cai, H.; Liu, J. Orbit and clock analysis of BDS-3 satellites using inter-satellite link observations. J. Geod. 2020, 94, 64. [Google Scholar] [CrossRef]
- Yu, F.; He, Z.; Xu, N. Autonomous navigation for GPS using inter-satellite ranging and relative direction measurements. Acta Astronaut. 2019, 160, 646–655. [Google Scholar] [CrossRef]
- Deng, Z.; Nischan, T.; Bradke, M. Multi-GNSS Rapid Orbit-, Clock- & EOP-Product Series; GFZ Data Services: Potsdam, Germany, 2017. [Google Scholar]
- Guo, J.; Xu, X.; Zhao, Q.; Liu, J. Precise orbit determination for quad-constellation satellites at Wuhan University: Strategy, result validation, and comparison. J. Geod. 2016, 90, 143–159. [Google Scholar] [CrossRef]
- Prange, L.; Villiger, A.; Sidorov, D.; Schaer, S.; Beutler, G.; Dach, R.; Jäggi, A. Overview of CODE’s MGEX solution with the focus on Galileo. Adv. Space Res. 2020, 66, 2786–2798. [Google Scholar] [CrossRef]
- Zhao, Q.; Guo, J.; Wang, C.; Lyu, Y.; Xu, X.; Yang, C.; Li, J. Precise orbit determination for BDS satellites. Satell. Navig. 2022, 3, 2. [Google Scholar] [CrossRef]
- Zhou, W.; Cai, H.; Chen, G.; Jiao, W.; He, Q.; Yang, Y. Multi-GNSS Combined Orbit and Clock Solutions at iGMAS. Sensors 2022, 22, 457. [Google Scholar] [CrossRef]
- Steigenberger, P.; Deng, Z.; Guo, J.; Prange, L.; Song, S.; Montenbruck, O. BeiDou-3 orbit and clock quality of the IGS Multi-GNSS Pilot Project. Adv. Space Res. 2022, in press. [Google Scholar] [CrossRef]
- Xie, X.; Geng, T.; Zhao, Q.; Liu, J.; Wang, B. Performance of BDS-3: Measurement quality analysis, precise orbit and clock determination. Sensors 2017, 17, 1233. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, X.; Wu, M.; Liu, W.; Li, X.; Yu, S.; Lu, C.; Wickert, J. Initial assessment of the COMPASS/BeiDou-3: New-generation navigation signals. J. Geod. 2017, 91, 1225–1240. [Google Scholar] [CrossRef]
- Tan, B.; Yuan, Y.; Ai, Q.; Zha, J. Real-Time Multi-GNSS Precise Orbit Determination Based on the Hourly Updated Ultra-Rapid Orbit Prediction Method. Remote Sens. 2022, 14, 4412. [Google Scholar] [CrossRef]
- Ai, Q.; Yuan, Y.; Zhang, B.; Xu, T.; Chen, Y. Refining GPS/GLONASS Satellite Clock Offset Estimation in the Presence of Pseudo-Range Inter-Channel Biases. Remote Sens. 2020, 12, 1821. [Google Scholar] [CrossRef]
- Ai, Q.; Zhang, B.; Yuan, Y.; Xu, T.; Chen, Y.; Tan, B. Evaluation and mitigation of the influence of pseudorange biases on GNSS satellite clock offset estimation. Measurement 2022, 193, 111015. [Google Scholar] [CrossRef]
- Cao, Y.; Huang, G.; Xie, W.; Xie, S.; Wang, H. Assessment and comparison of satellite clock offset between BeiDou-3 and other GNSSs. Acta Geod. Geophys. 2021, 56, 303–319. [Google Scholar] [CrossRef]
- Li, X.; Hu, X.; Guo, R.; Tang, C.; Zhou, S.; Liu, S.; Chen, J. Orbit and positioning accuracy for new generation BeiDou satellites during the earth eclipsing period. J. Navig. 2018, 71, 1069–1087. [Google Scholar] [CrossRef]
- Li, X.; Yuan, Y.; Zhu, Y.; Jiao, W.; Bian, L.; Li, X.; Zhang, K. Improving BDS-3 precise orbit determination for medium earth orbit satellites. GPS Solut. 2020, 24, 53. [Google Scholar] [CrossRef]
- Lin, X.; Baojun, L.; Yingchun, L.; Sujie, X.; Tao, B. Satellite geometry and attitude mode of BDS-3 MEO satellites developed by SECM. In Proceedings of the 31st International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2018), Miami, FL, USA, 24–28 September 2018; pp. 1268–1289. [Google Scholar]
- Wanninger, L.; Beer, S. BeiDou satellite-induced code pseudorange variations: Diagnosis and therapy. GPS Solut. 2015, 19, 639–648. [Google Scholar] [CrossRef] [Green Version]
- Noll, C.E. The crustal dynamics data information system: A resource to support scientific analysis using space geodesy. Adv. Space Res. 2010, 45, 1421–1440. [Google Scholar] [CrossRef]
- Liu, T.; Zhang, B.; Yuan, Y.; Li, M. Real-Time Precise Point Positioning (RTPPP) with raw observations and its application in real-time regional ionospheric VTEC modeling. J. Geod. 2018, 92, 1267–1283. [Google Scholar] [CrossRef]
- Zha, J.; Zhang, B.; Liu, T.; Hou, P. Ionosphere-weighted undifferenced and uncombined PPP-RTK: Theoretical models and experimental results. GPS Solut. 2021, 25, 135. [Google Scholar] [CrossRef]
- Zhang, B.; Chen, Y.; Yuan, Y. PPP-RTK based on undifferenced and uncombined observations: Theoretical and practical aspects. J. Geod. 2019, 93, 1011–1024. [Google Scholar] [CrossRef]
- Zhang, B.; Teunissen, P.J. Characterization of multi-GNSS between-receiver differential code biases using zero and short baselines. Sci. Bull. 2015, 60, 1840–1849. [Google Scholar] [CrossRef] [Green Version]
- Zhang, B.; Teunissen, P.J.; Odijk, D. A novel un-differenced PPP-RTK concept. J. Navig. 2011, 64, S180–S191. [Google Scholar] [CrossRef] [Green Version]
- Guo, F.; Li, X.; Liu, W. Mitigating BeiDou satellite-induced code bias: Taking into account the stochastic model of corrections. Sensors 2016, 16, 909. [Google Scholar] [CrossRef] [Green Version]
- Montenbruck, O.; Schmid, R.; Mercier, F.; Steigenberger, P.; Noll, C.; Fatkulin, R.; Kogure, S.; Ganeshan, A.S. GNSS satellite geometry and attitude models. Adv. Space Res. 2015, 56, 1015–1029. [Google Scholar] [CrossRef] [Green Version]
- Petit, G.; Luzum, B. IERS Conventions; Verlag des Bundesamts für Kartographie und Geodäsie: Frankfurt am Main, Germany, 2010; ISBN 3-89888-989-6. [Google Scholar]
- Arnold, D.; Meindl, M.; Beutler, G.; Dach, R.; Schaer, S.; Lutz, S.; Prange, L.; Sośnica, K.; Mervart, L.; Jäggi, A. CODE’s new solar radiation pressure model for GNSS orbit determination. J. Geod. 2015, 89, 775–791. [Google Scholar] [CrossRef] [Green Version]
- Montenbruck, O.; Steigenberger, P.; Hauschild, A. Multi-GNSS signal-in-space range error assessment—Methodology and results. Adv. Space Res. 2018, 61, 3020–3038. [Google Scholar] [CrossRef]
- Steigenberger, P.; Montenbruck, O. Consistency of MGEX orbit and clock products. Engineering 2020, 6, 898–903. [Google Scholar] [CrossRef]
- Pearlman, M.R.; Degnan, J.J.; Bosworth, J.M. The international laser ranging service. Adv. Space Res. 2002, 30, 135–143. [Google Scholar] [CrossRef]
- CSNO. Definitions and Descriptions of BDS/GNSS Satellite Parameters for High Precision Applications; China Satellite Navigation Office: Beijing, China, 2019. Available online: http://www.beidou.gov.cn/yw/gfgg/201911/W020191126317485269344.pdf (accessed on 12 October 2022). (In Chinese)
Figure 1.
Tracking stations selected for BDS-3 POD. Sites are marked by green diamonds, blue circles and red five-pointed stars for Javad receivers, Septentrio receivers and Trimble receivers, respectively.
Figure 1.
Tracking stations selected for BDS-3 POD. Sites are marked by green diamonds, blue circles and red five-pointed stars for Javad receivers, Septentrio receivers and Trimble receivers, respectively.

Figure 2.
Flowchart of BDS-3 POD procedure based on B1CB2a, B1CB2b and B1IB3I dual-frequency measurement combinations.
Figure 2.
Flowchart of BDS-3 POD procedure based on B1CB2a, B1CB2b and B1IB3I dual-frequency measurement combinations.

Figure 3.
Average C/N0 series of BDS-3 satellites in different frequency.

Figure 4.
The MP series of BDS-3 MEO satellites in different frequencies.


Figure 5.
The MP series of BDS-3 IGSO satellites in different frequencies.

Figure 6.
The pseudo-range noise series of BDS-3 satellites in different frequencies.

Figure 7.
Histogram of the orbit-only SISRE for MEOs and IGSOs of BDS-3 between different solutions.
Figure 7.
Histogram of the orbit-only SISRE for MEOs and IGSOs of BDS-3 between different solutions.

Figure 8.
SLR residuals of BDS-3 four MEOs for different solutions. (a) for M2/C20, (b) for M3/C21, (c) for M9/C29, and (d) for M10/C30, respectively.
Figure 8.
SLR residuals of BDS-3 four MEOs for different solutions. (a) for M2/C20, (b) for M3/C21, (c) for M9/C29, and (d) for M10/C30, respectively.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Operational status of the BDS-3 constellation as of October 2022.
| Satellite | PRN | SVN | Type | Manufacture | Launch Date |
|---|---|---|---|---|---|
| BDS3-M01 | C19 | C201 | MEO | CAST | 5 November 2017 |
| BDS3-M02 | C20 | C202 | MEO | CAST | 5 November 2017 |
| BDS3-M03 | C27 | C203 | MEO | SECM | 1 January 2018 |
| BDS3-M04 | C28 | C204 | MEO | SECM | 11 January 2018 |
| BDS3-M05 | C22 | C205 | MEO | CAST | 12 February 2018 |
| BDS3-M06 | C21 | C206 | MEO | CAST | 12 February 2018 |
| BDS3-M07 | C29 | C207 | MEO | SECM | 29 March 2018 |
| BDS3-M08 | C30 | C208 | MEO | SECM | 29 March 2018 |
| BDS3-M09 | C23 | C209 | MEO | CAST | 29 July 2018 |
| BDS3-M10 | C24 | C210 | MEO | CAST | 29 July 2018 |
| BDS3-M11 | C26 | C211 | MEO | SECM | 24 August 2018 |
| BDS3-M12 | C25 | C212 | MEO | SECM | 24 August 2018 |
| BDS3-M13 | C32 | C213 | MEO | CAST | 19 September 2018 |
| BDS3-M14 | C33 | C214 | MEO | CAST | 19 September 2018 |
| BDS3-M15 | C34 | C215 | MEO | SECM | 15 October 2018 |
| BDS3-M16 | C35 | C216 | MEO | SECM | 15 October 2018 |
| BDS3-M17 | C36 | C218 | MEO | CAST | 18 November 2018 |
| BDS3-M18 | C37 | C219 | MEO | CAST | 18 November 2018 |
| BDS3-M19 | C41 | C227 | MEO | CAST | 16 December 2019 |
| BDS3-M20 | C42 | C228 | MEO | CAST | 16 December 2019 |
| BDS3-M21 | C43 | C226 | MEO | SECM | 23 November 2019 |
| BDS3-M22 | C44 | C225 | MEO | SECM | 23 November 2019 |
| BDS3-M23 | C45 | C222 | MEO | CAST | 22 September 2019 |
| BDS3-M24 | C46 | C223 | MEO | CAST | 22 September 2019 |
| BDS3-I01 | C38 | C220 | IGSO | CAST | 20 April 2019 |
| BDS3-I02 | C39 | C221 | IGSO | CAST | 24 June 2019 |
| BDS3-I03 | C40 | C224 | IGSO | CAST | 4 November 2019 |
| BDS3-G01 | C59 | C217 | GEO | CAST | 1 November 2018 |
| BDS3-G02 | C60 | C229 | GEO | CAST | 9 March 2020 |
| BDS3-G03 | C61 | C230 | GEO | CAST | 2 June 2020 |
CAST: China Academy of Space Technology. SECM: Shanghai Engineering Center for Microsatellites, Chinese Academy of Sciences.
Table 2.
BDS-3 satellite POD strategy and important aspects for GFZ solution, CODE solution and B1CB2a, B1CB2b and B1IB3I combinations.
Table 2.
BDS-3 satellite POD strategy and important aspects for GFZ solution, CODE solution and B1CB2a, B1CB2b and B1IB3I combinations.
| GFZ Solution | CODE Solution | B1CB2a, B1CB2b and B1IB3I Combinations | |
|---|---|---|---|
| Platform | EPOS | Bernese GNSS Software version 5.3 | Modified Bernese GNSS Software version 5.2 |
| Stations used for satellite POD | 160 stations | 140 stations, with 90 stations supporting BDS-3 | 129 stations, all supporting BDS-3 |
| Signals used for BDS-3 POD | B1IB3I | B1IB3I | B1CB2a, B1CB2b and B1IB3I |
| Data differencing strategy | Undifferenced | Double differenced | Double differenced |
| Data coverage | 24 h arc | 72 h arc | 72 h arc |
| Sampling rate | 300 s | 180 s | 180 s |
| Elevation angle cut-off | 7° | 3° | 3° |
| Weighting | Elevation-dependent weighting | Elevation-dependent weighting | Elevation-dependent weighting, and 6 mm threshold value for carrier phase residuals |
| A prior orbits | Rapid products | Rapid products | Based on broadcast ephemeris |
| Satellite and receiver antenna PCO/PCV | igs14.atx for both satellite and receiver antennas | CSNO value for satellite antennas, and igsR3.atx for receiver antennas | igs14_2218.atx for satellite antennas. For receiver antennas, GPS L1/L2 values adopted for all dual-frequency measurement combinations of BDS-3 [39] |
| Antenna thrust for CAST MEO, SECM MEO and CAST IGSO | 310 W/280 W/100 W | 310 W/280 W/0 W | Not applied |
| Earth albedo | Not applied | Not applied | Not applied |
| Troposphere | 1 h random-walk for zenith delay and 2 h random-walk for gradients | 2 h piece-wise linear for zenith delay and 24 h piece-wise linear for gradients | 2 h piece-wise linear for zenith delay and 24 h piece-wise linear for gradients |
| Ambiguities | Fixed | Fixed | Fixed |
| Pseudo-stochastic orbit parameters | At noon in radial, along-track and cross-track direction | 12 h in radial, along-track and cross-track direction | Every 12 h, with the constraint of 1 × 10−6 m/s, 1 × 10−5 m/s and 1 × 10−8 m/s in the radial, along-track and cross-track direction, respectively |
| Precession and nutation | IAU 2000 | IAU 2000 and IAU 2000R06 | IAU 2000 |
| Geopotential | EGM2008 | EGM2008 12 × 12 | EGM2008 12 × 12 |
| Solid Earth tides, ocean tides and solid Earth pole tides | IERS Conventions 2010 | IERS Conventions 2010 | IERS Conventions 2010 [40] |
| N body gravitation | DE421 ephemeris from JPL | DE421 ephemeris from JPL | DE405 ephemeris from JPL |
| A prior Solar Radiation Pressure (SRP) model | None | None | None |
| SRP model | Empirical CODE Orbit Model, ECOM (D0, Y0, B0, BC, BS) | The new extended ECOM, ECOM-2 (D0, Y0, B0, BC, BS, D2C, D2S) | The new extended ECOM, ECOM-2 (D0, Y0, B0, BC, BS, D2C, D2S) [41] |
Table 3.
RMS statistics of observation quality for BDS-3 IGSOs and MEOs.
| Type/Frequency | IGSOs | MEOs | ||||
|---|---|---|---|---|---|---|
| C/N0 (dB-Hz) | MP (m) | Pseudo-Range Noise (m) | C/N0 (dB-Hz) | MP (m) | Pseudo-Range Noise (m) | |
| B1I | 45.18 | 0.48 | 0.40 | 47.28 | 0.40 | 0.33 |
| B3I | 47.23 | 0.29 | 0.23 | 48.78 | 0.23 | 0.20 |
| B1C | 43.88 | 0.32 | 0.30 | 45.84 | 0.26 | 0.24 |
| B2a | 45.27 | 0.26 | 0.21 | 47.49 | 0.23 | 0.18 |
| B2b | 45.93 | 0.24 | 0.22 | 47.97 | 0.22 | 0.18 |
Table 4.
Orbit-only SISRE for MEOs and IGSOs of BDS-3 between different solutions.
| Combination1/AC1 | Combination2/AC2 | Orbit-Only SISRE (cm) | |
|---|---|---|---|
| MEOs | IGSOs | ||
| CODE | GFZ | 5.10 | 9.13 |
| CODE | B1CB2a | 5.32 | 9.53 |
| CODE | B1CB2b | 5.70 | 9.80 |
| CODE | B1IB3I | 6.68 | 11.87 |
| GFZ | B1CB2a | 5.18 | 9.30 |
| GFZ | B1CB2b | 5.50 | 9.63 |
| GFZ | B1IB3I | 6.40 | 11.40 |
| B1CB2a | B1CB2b | 2.88 | 4.40 |
| B1CB2a | B1IB3I | 4.40 | 6.83 |
| B1CB2b | B1IB3I | 4.10 | 6.87 |
Table 5.
Mean value and mean RMS of SLR residuals of BDS-3 MEOs.
| PRN of BDS-3 | Solutions | Mean Value (cm) | Mean RMS (cm) |
|---|---|---|---|
| C20, M2 (CAST) | CODE | 2.24 | 3.50 |
| GFZ | 2.55 | 3.90 | |
| B1CB2a | 2.34 | 4.13 | |
| B1CB2b | 2.54 | 4.20 | |
| B1IB3I | 2.94 | 4.83 | |
| C21, M3 (CAST) | CODE | 2.27 | 3.58 |
| GFZ | 1.82 | 3.54 | |
| B1CB2a | 2.44 | 4.02 | |
| B1CB2b | 2.47 | 4.12 | |
| B1IB3I | 3.01 | 5.25 | |
| C29, M9 (SECM) | CODE | −3.68 | 4.03 |
| GFZ | −3.19 | 3.87 | |
| B1CB2a | −3.74 | 4.01 | |
| B1CB2b | −4.07 | 4.35 | |
| B1IB3I | −4.64 | 5.03 | |
| C30, M10 (SECM) | CODE | −4.37 | 4.68 |
| GFZ | −3.36 | 3.61 | |
| B1CB2a | −3.89 | 4.05 | |
| B1CB2b | −4.26 | 4.43 | |
| B1IB3I | −4.48 | 4.86 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Tan, B.; Ai, Q.; Yuan, Y. Analysis of Precise Orbit Determination of BDS-3 MEO and IGSO Satellites Based on Several Dual-Frequency Measurement Combinations. Remote Sens. 2022, 14, 6030. https://doi.org/10.3390/rs14236030
AMA Style
Tan B, Ai Q, Yuan Y. Analysis of Precise Orbit Determination of BDS-3 MEO and IGSO Satellites Based on Several Dual-Frequency Measurement Combinations. Remote Sensing. 2022; 14(23):6030. https://doi.org/10.3390/rs14236030
Chicago/Turabian StyleTan, Bingfeng, Qingsong Ai, and Yunbin Yuan. 2022. "Analysis of Precise Orbit Determination of BDS-3 MEO and IGSO Satellites Based on Several Dual-Frequency Measurement Combinations" Remote Sensing 14, no. 23: 6030. https://doi.org/10.3390/rs14236030
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.