
A Novel Technique Using Planar Area and Ground Shadows Calculated from UAV RGB Imagery to Estimate Pistachio Tree (Pistacia vera L.) Canopy Volume



Abstract
:1. Introduction
2. Materials and Methods
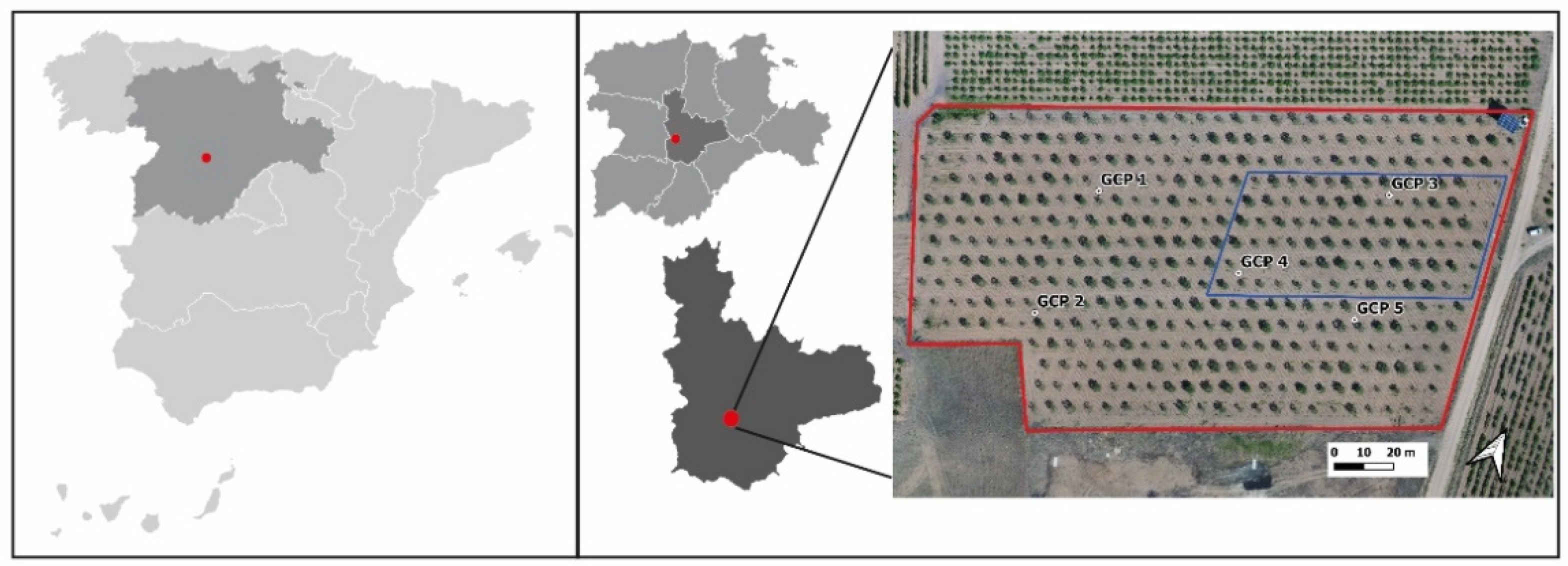
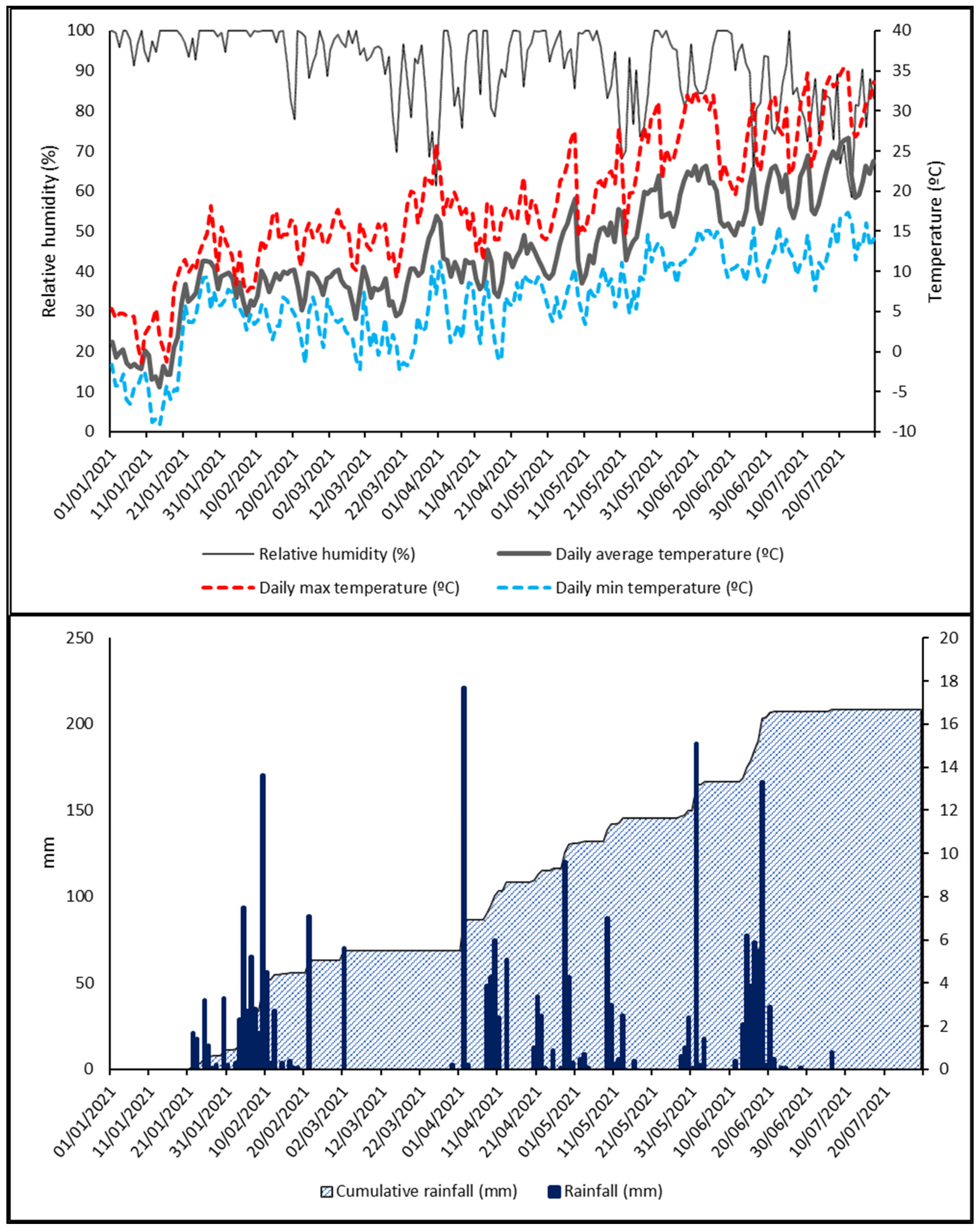
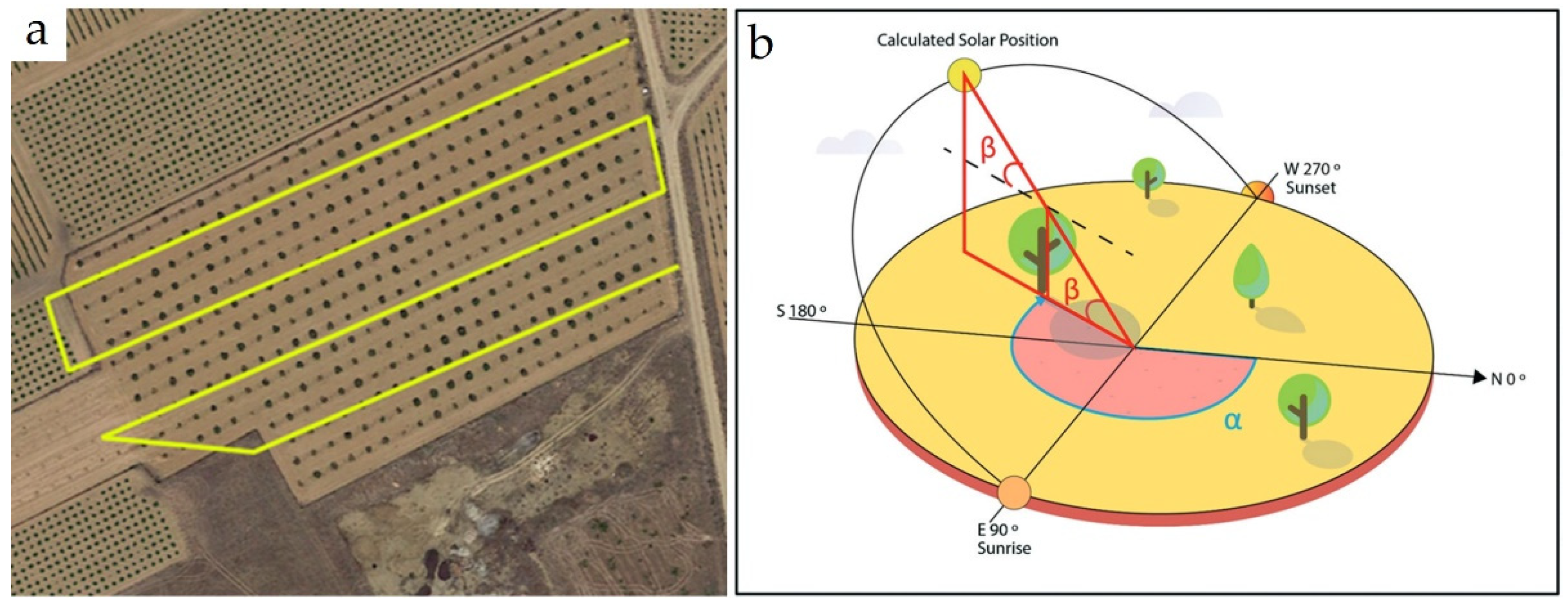
2.1. Experimental Site
2.2. Methodology
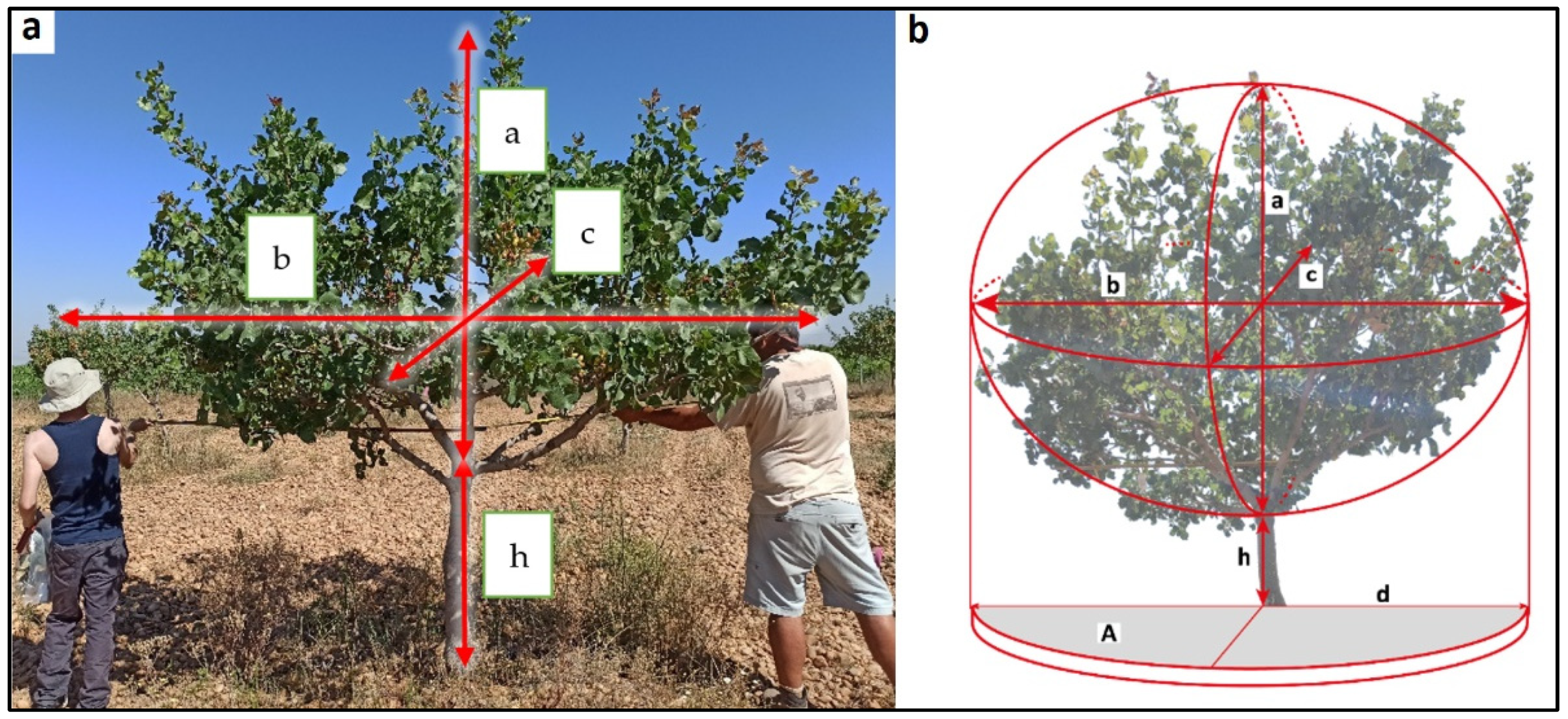
2.3. Ground-Truth Data
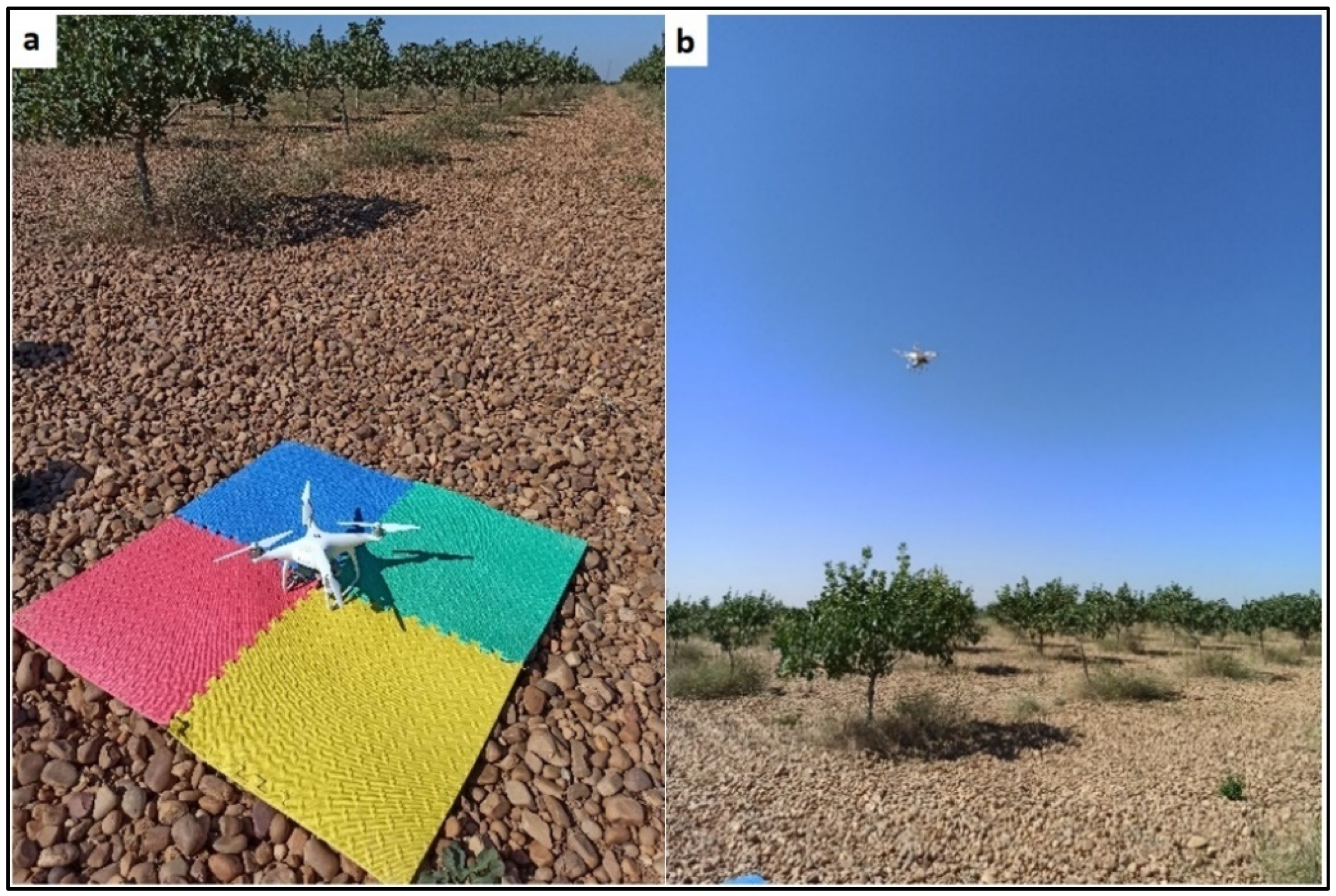
2.4. UAV Imagery Acquisition
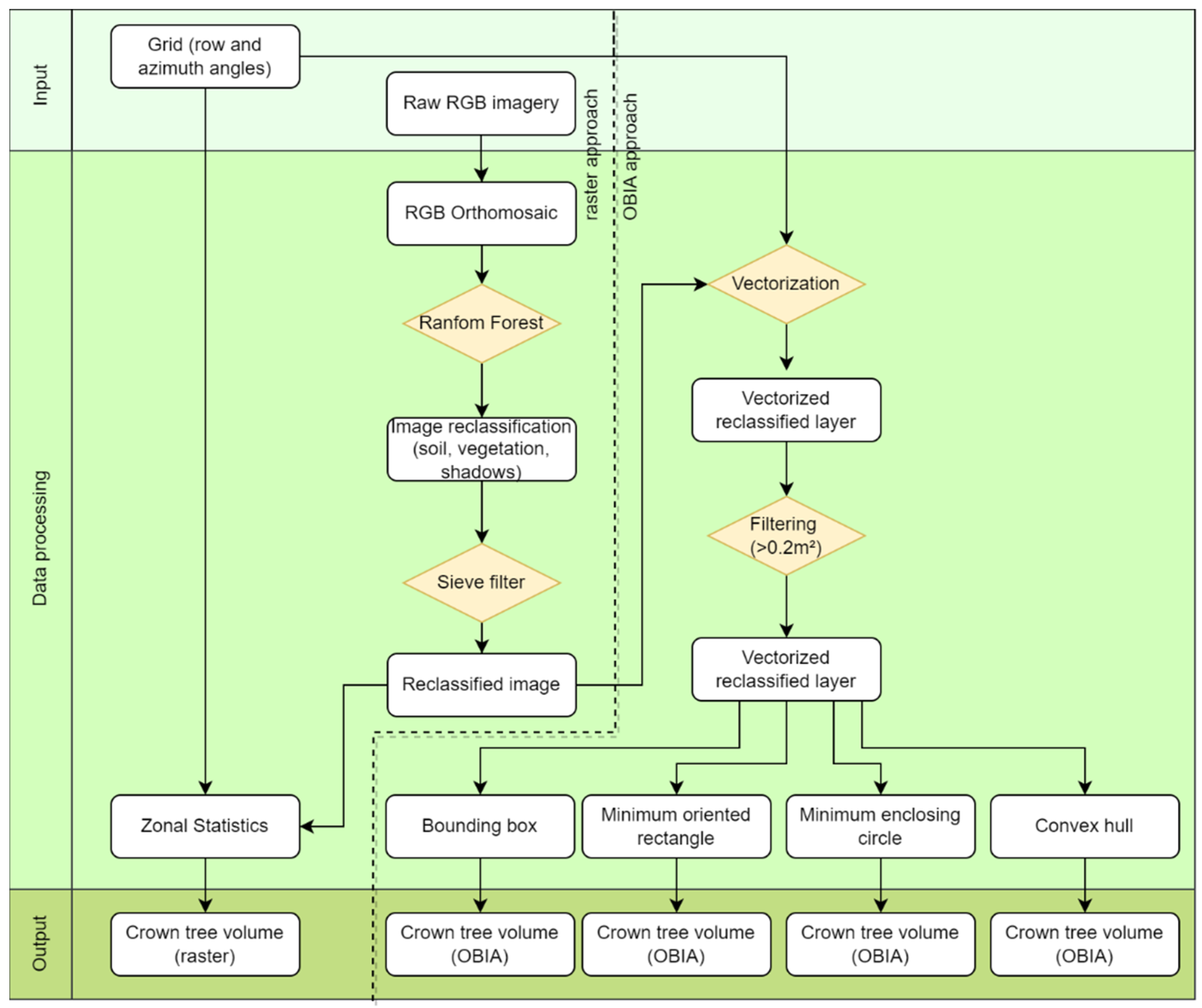
2.5. Orthomosaic Processing
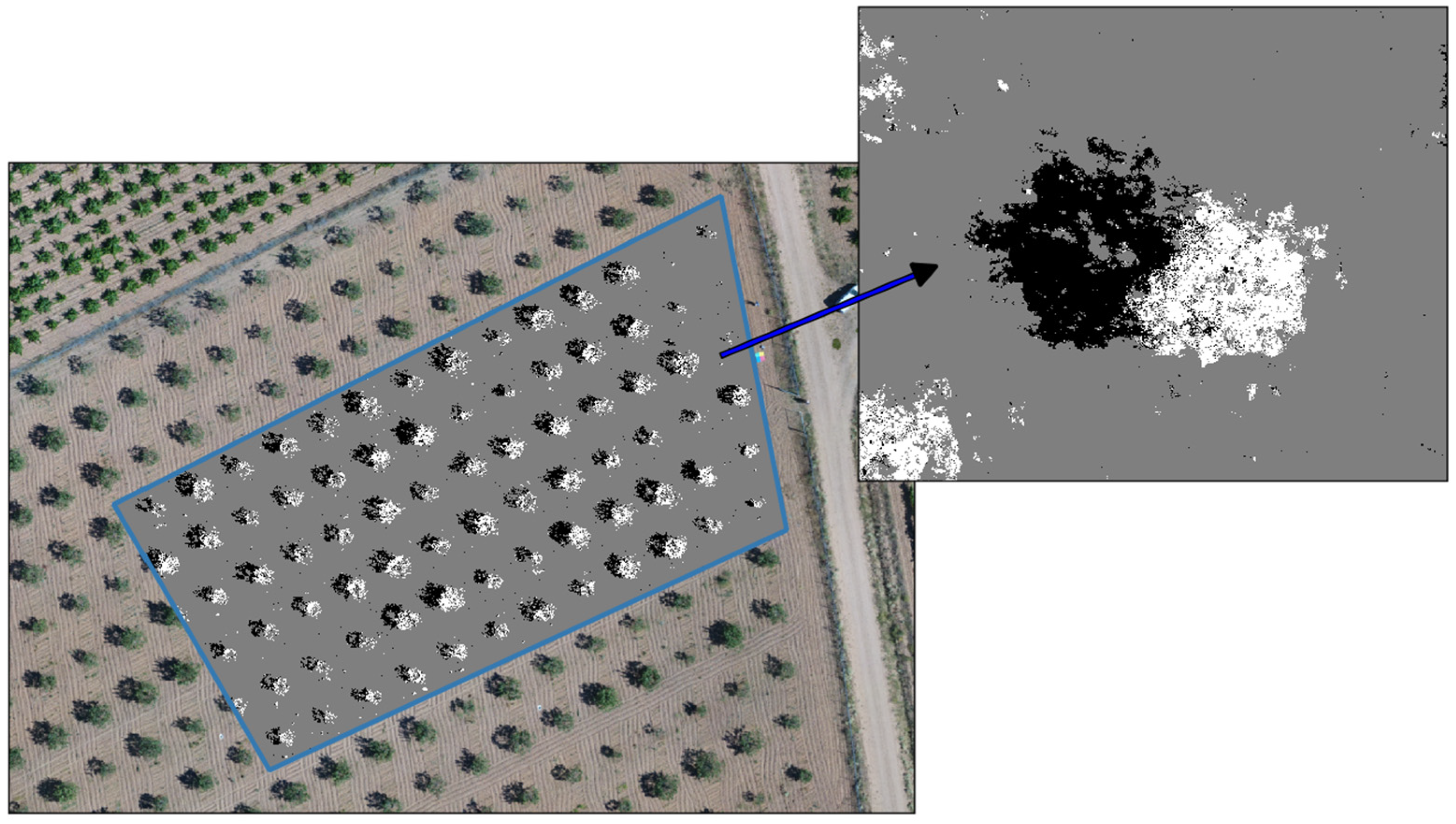
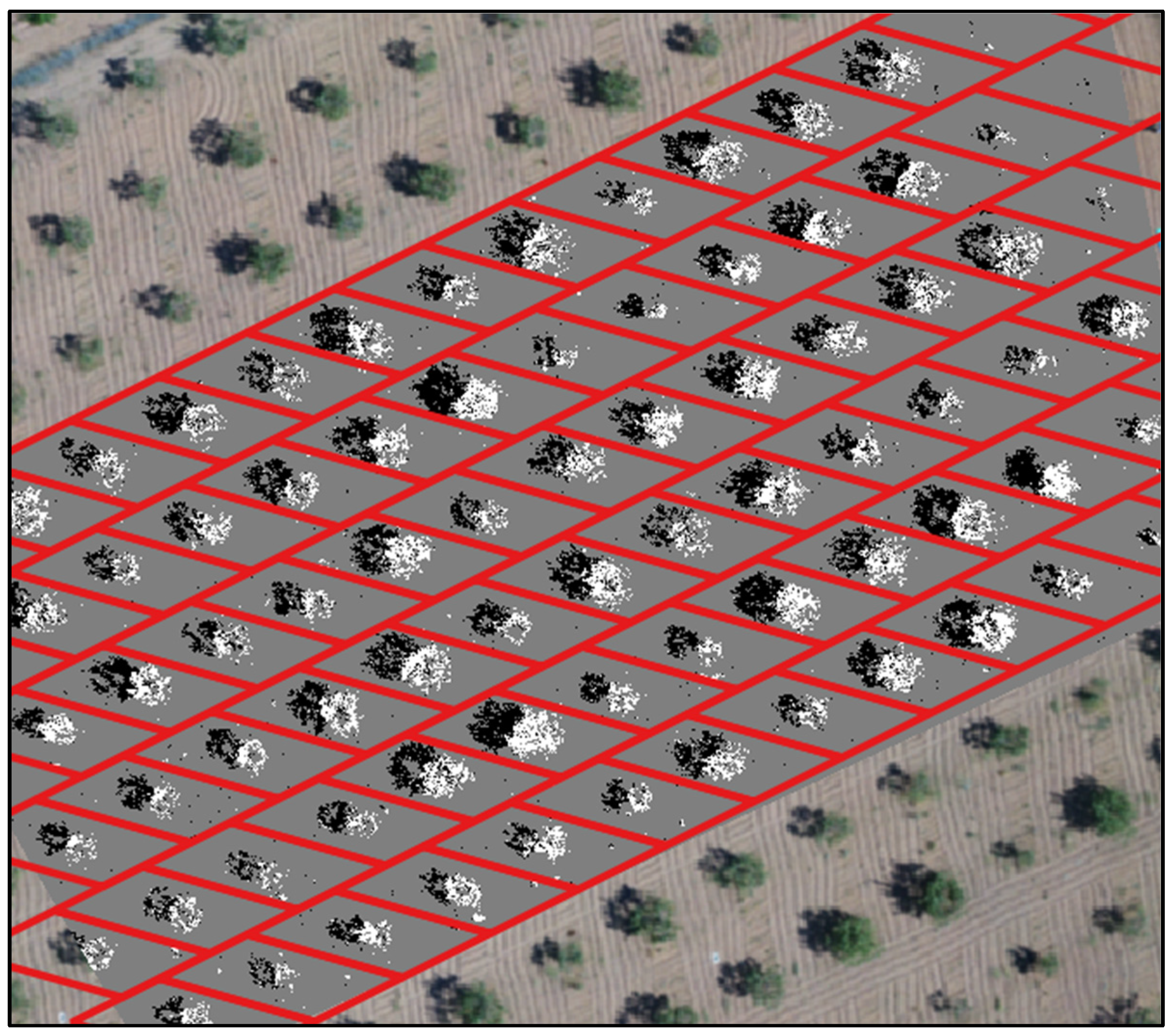
2.5.1. Pixel-Based Methodological Approach
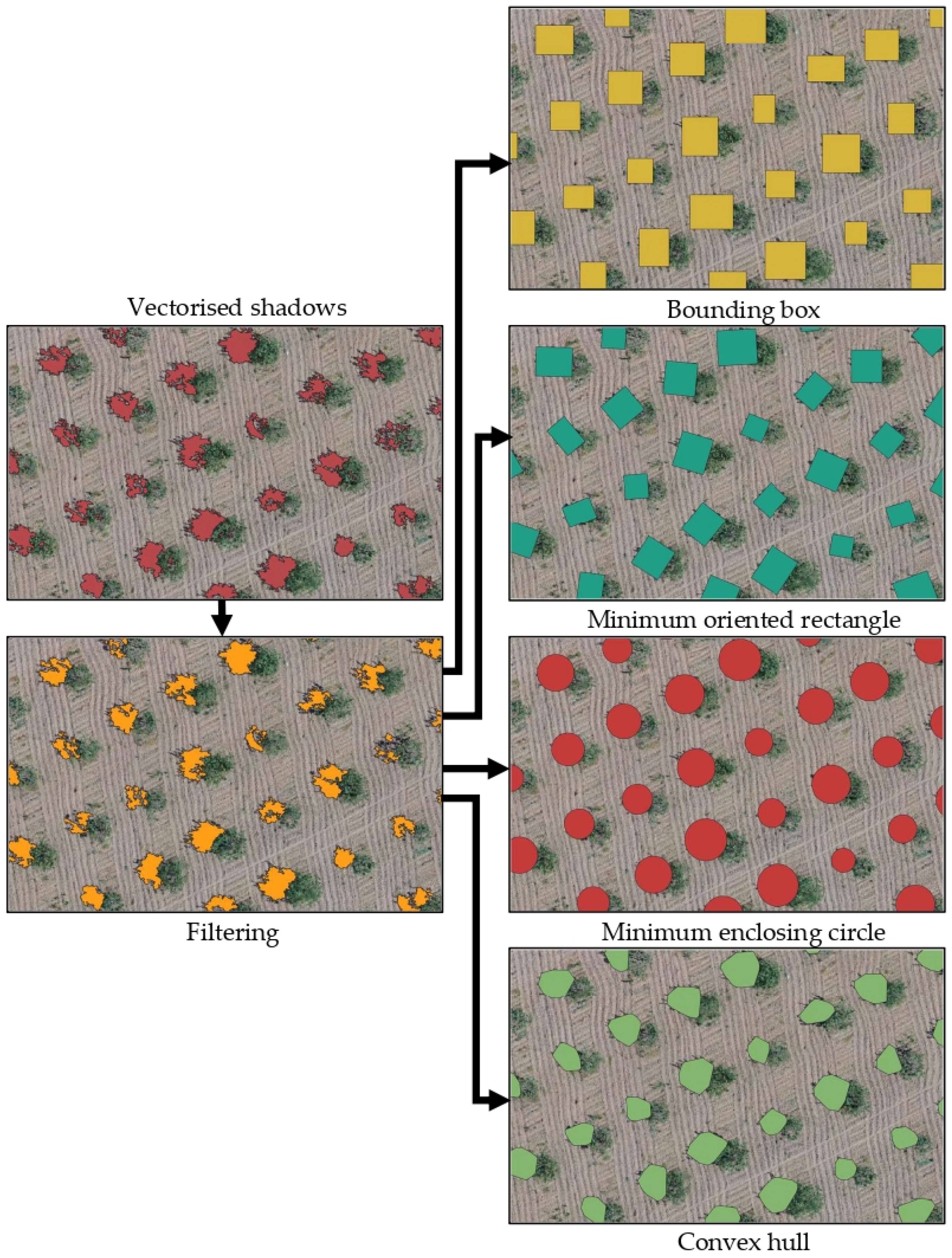
2.5.2. OBIA Methodological Approach
- Circle: The crown volume was calculated as a sphere using an equivalent radius obtained by averaging the radius of the polygons of the vegetation plane and the shadow plane. These results were validated against the values of the sphere volumes computed from ground-truth data.
- Bounding boxes (envelopes) and oriented rectangles: The crown volume was calculated as an ellipsoid. The equivalent three radii were the length of each plane’s polygon and the polygons’ averaged width. These results were validated against the values of the ellipsoid volumes computed from ground-truth data.
- Convex hulls: As in the raster analysis approach, an averaged area was calculated by averaging the area of the two polygons (from the vegetation and the shadow planes). Then, the averaged area was considered a circle and the equivalent radius was estimated to calculate the crown volume as a sphere. These results were validated against the values of the sphere volumes computed from ground-truth data.
3. Results
4. Discussion
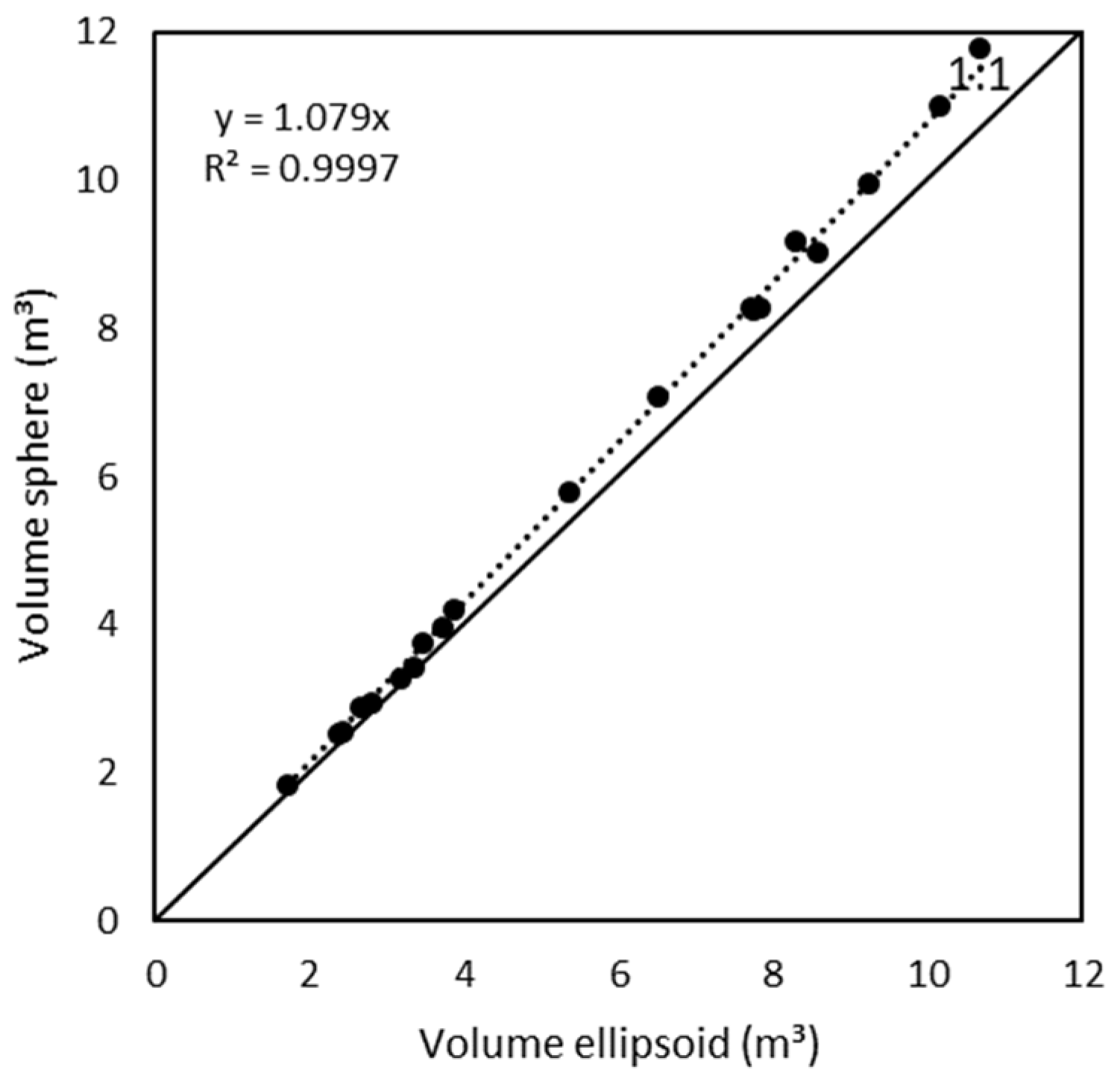
- First, spheres and ellipsoids were used in the present work as tree crowns because the studied pistachio canopies were similar to these geometries. However, this assumption can lead to errors because the canopy does not have a perfect geometric shape. The present technique could be adjusted to other shapes (for instance, using the formula for the cone or the paraboloid [12]). In any case, this article aims to present a novel technique to estimate pistachio tree (Pistacia vera L.) canopy volume by analyzing ground shadows using UAV RGB imagery, so it is open to further modification and improvement in future research.
- The shadows must be projected correctly on the ground. That is, adequate direct lighting is required, without clouds obstructing the sun’s rays on the Earth’s surface and generating diffuse illumination.
- Another constraint could be the amount of available ground on which the shade will be projected. It should not be an issue in woody crop plantations because they are planned to ensure good solar illumination, avoiding the shading of some trees over others (a typical planting pattern is 7 × 6 m or 7 × 7 m). However, some new plantations are more intensive, with low spacings (up to 4 × 1.25 m). This implies planting in hedgerow systems, which can be approached in a similar way to that reported by Vélez et al. [37].
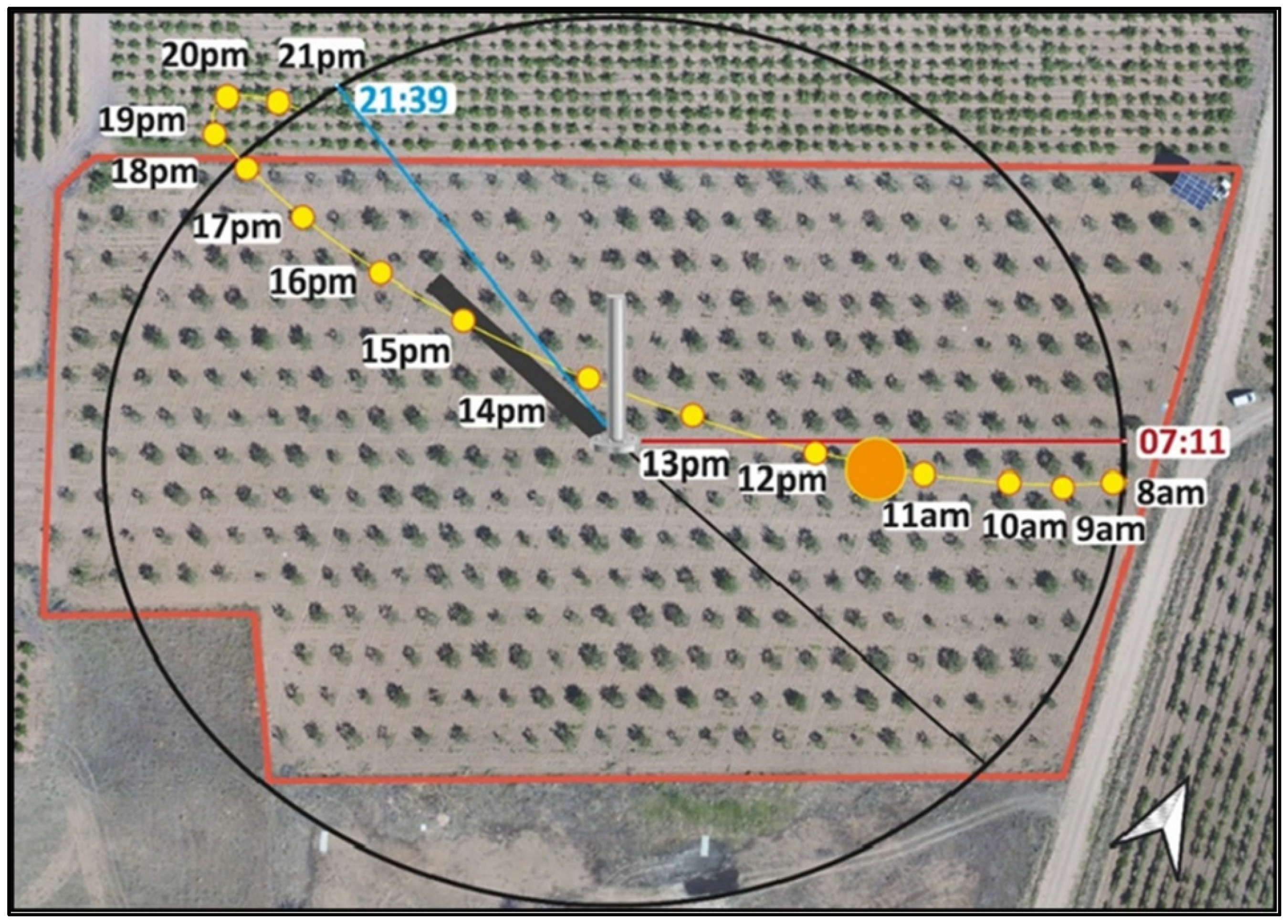
- Shadows vary throughout the day depending on the sun’s position. Therefore, it is essential to plan the mission accordingly to obtain the best information on the projection of shadows on the ground. Yet, this is not a limitation of this methodology alone, as all methods based on remote sensing with solar illumination must consider natural lighting conditions to obtain good results.
- The values for filtering the noise (Figure 10 and Figure 11) were chosen after several tests using different values for a better visual fit, aiming to remove the weeds from the image and isolate the pistachio tree crowns. This aspect could be improved in future versions of the approach since this work seeks not to develop an algorithm to identify weeds in pistachio orchards, but to provide a technique to size the tree canopy.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bulló, M.; Juanola-Falgarona, M.; Hernández-Alonso, P.; Salas-Salvadó, J. Nutrition Attributes and Health Effects of Pistachio Nuts. Br. J. Nutr. 2015, 113, S79–S93. [Google Scholar] [CrossRef] [Green Version]
- Steduto, P.; Hsiao, T.C.; Fereres, E.; Raes, D. Crop Yield Response to Water, 1st ed.; Food and Agriculture Organization of the United Nations: Rome, Italy, 2012; ISBN 978-92-5-107274-5. [Google Scholar]
- Mandalari, G.; Barreca, D.; Gervasi, T.; Roussell, M.A.; Klein, B.; Feeney, M.J.; Carughi, A. Pistachio Nuts (Pistacia vera L.): Production, Nutrients, Bioactives and Novel Health Effects. Plants 2021, 11, 18. [Google Scholar] [CrossRef]
- Ferguson, L.; Polito, V.; Kallsen, C. The Pistachio Tree; Botany and Physiology and Factors That Affect Yield. In Pistachio Production Manual; University of California: Davis, CA, USA, 2005; pp. 31–39. [Google Scholar]
- Charles-Edwards, D.A.; Thornley, J.H.M. Light Interception by an Isolated Plant A Simple Model. Ann. Bot. New Ser. 1973, 37, 919–928. [Google Scholar] [CrossRef]
- Allen, R.G.; Pereira, L.S.; Raes, D.; Smith, M. Crop Evapotranspiration: Guidelines for Computing Crop Water Requirements; Food and Agriculture Organization of the United Nations: Rome, Italy, 1998; ISBN 92-5-104219-5. [Google Scholar]
- Todd, R.W.; Klocke, N.L.; Hergert, G.W.; Parkhurst, A.M. Evaporation from Soil Influenced by Crop Shading, Crop Residue, and Wetting Regime. Trans. ASAE 1991, 34, 461–466. [Google Scholar] [CrossRef]
- Bandyopadhyay, P.K.; Mallick, S. Actual Evapotranspiration and Crop Coefficients of Wheat (Triticum Aestivum) under Varying Moisture Levels of Humid Tropical Canal Command Area. Agric. Water Manag. 2003, 59, 33–47. [Google Scholar] [CrossRef]
- Jia, Q.; Wang, Y.-P. Relationships between Leaf Area Index and Evapotranspiration and Crop Coefficient of Hilly Apple Orchard in the Loess Plateau. Water 2021, 13, 1957. [Google Scholar] [CrossRef]
- Netzer, Y.; Yao, C.; Shenker, M.; Bravdo, B.-A.; Schwartz, A. Water Use and the Development of Seasonal Crop Coefficients for Superior Seedless Grapevines Trained to an Open-Gable Trellis System. Irrig. Sci. 2009, 27, 109–120. [Google Scholar] [CrossRef]
- León, L.; Díaz-Rueda, P.; Belaj, A.; De la Rosa, R.; Carrascosa, C.; Colmenero-Flores, J.M. Evaluation of Early Vigor Traits in Wild Olive Germplasm. Sci. Hortic. 2020, 264, 109157. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Z.; Kleinn, C.; Nölke, N. Assessing Tree Crown Volume—A Review. For. Int. J. For. Res. 2021, 94, 18–35. [Google Scholar] [CrossRef]
- Balafoutis, A.T.; Beck, B.; Fountas, S.; Tsiropoulos, Z.; Vangeyte, J.; Gómez-Barbero, M.; Pedersen, S.M. Smart Farming Technologies–Description, Taxonomy and Economic Impact. In Precision Agriculture: Technology and Economic Perspectives; Progress in Precision Agriculture; Springer: Berlin, Germany, 2017; p. 58. ISBN 978-3-319-68715-5. [Google Scholar]
- Pierce, F.J.; Clay, D. GIS Applications in Agriculture; CRC Press: Boca Raton, FL, USA, 2007; ISBN 978-0-8493-7526-2. [Google Scholar]
- Gebbers, R.; Adamchuk, V.I. Precision Agriculture and Food Security. Science 2010, 327, 828–831. [Google Scholar] [CrossRef]
- Santesteban, L.G. Precision Viticulture and Advanced Analytics. A Short Review. Food Chem. 2019, 279, 58–62. [Google Scholar] [CrossRef]
- Muruganantham, P.; Wibowo, S.; Grandhi, S.; Samrat, N.H.; Islam, N. A Systematic Literature Review on Crop Yield Prediction with Deep Learning and Remote Sensing. Remote Sens. 2022, 14, 1990. [Google Scholar] [CrossRef]
- Albetis, J.; Duthoit, S.; Guttler, F.; Jacquin, A.; Goulard, M.; Poilvé, H.; Féret, J.-B.; Dedieu, G. Detection of Flavescence Dorée Grapevine Disease Using Unmanned Aerial Vehicle (UAV) Multispectral Imagery. Remote Sens. 2017, 9, 308. [Google Scholar] [CrossRef] [Green Version]
- Pádua, L.; Marques, P.; Adão, T.; Guimarães, N.; Sousa, A.; Peres, E.; Sousa, J.J. Vineyard Variability Analysis through UAV-Based Vigour Maps to Assess Climate Change Impacts. Agronomy 2019, 9, 581. [Google Scholar] [CrossRef] [Green Version]
- Barajas, E.; Álvarez, S.; Fernández, E.; Vélez, S.; Rubio, J.A.; Martín, H. Sentinel-2 Satellite Imagery for Agronomic and Quality Variability Assessment of Pistachio (Pistacia vera L.). Sustainability 2020, 12, 8437. [Google Scholar] [CrossRef]
- Maes, W.H.; Steppe, K. Perspectives for Remote Sensing with Unmanned Aerial Vehicles in Precision Agriculture. Trends Plant Sci. 2019, 24, 152–164. [Google Scholar] [CrossRef]
- Kim, J.; Kim, S.; Ju, C.; Son, H.I. Unmanned Aerial Vehicles in Agriculture: A Review of Perspective of Platform, Control, and Applications. IEEE Access 2019, 7, 105100–105115. [Google Scholar] [CrossRef]
- Xie, C.; Yang, C. A Review on Plant High-Throughput Phenotyping Traits Using UAV-Based Sensors. Comput. Electron. Agric. 2020, 178, 105731. [Google Scholar] [CrossRef]
- Matese, A.; Di Gennaro, S. Practical Applications of a Multisensor UAV Platform Based on Multispectral, Thermal and RGB High Resolution Images in Precision Viticulture. Agriculture 2018, 8, 116. [Google Scholar] [CrossRef] [Green Version]
- García-Fernández, M.; Sanz-Ablanedo, E.; Pereira-Obaya, D.; Rodríguez-Pérez, J.R. Vineyard Pruning Weight Prediction Using 3D Point Clouds Generated from UAV Imagery and Structure from Motion Photogrammetry. Agronomy 2021, 11, 2489. [Google Scholar] [CrossRef]
- Pagliai, A.; Ammoniaci, M.; Sarri, D.; Lisci, R.; Perria, R.; Vieri, M.; D’Arcangelo, M.E.M.; Storchi, P.; Kartsiotis, S.-P. Comparison of Aerial and Ground 3D Point Clouds for Canopy Size Assessment in Precision Viticulture. Remote Sens. 2022, 14, 1145. [Google Scholar] [CrossRef]
- Korhonen, L.; Vauhkonen, J.; Virolainen, A.; Hovi, A.; Korpela, I. Estimation of Tree Crown Volume from Airborne Lidar Data Using Computational Geometry. Int. J. Remote Sens. 2013, 34, 7236–7248. [Google Scholar] [CrossRef]
- Seidel, D.; Fleck, S.; Leuschner, C.; Hammett, T. Review of Ground-Based Methods to Measure the Distribution of Biomass in Forest Canopies. Ann. For. Sci. 2011, 68, 225–244. [Google Scholar] [CrossRef] [Green Version]
- Eltner, A.; Hoffmeister, D.; Kaiser, A.; Karrasch, P.; Klingbeil, L.; Stöcker, C.; Rovere, A. UAVs for the Environmental Sciences: Methods and Applications; WBG Academic: Darmstadt, Germany, 2022; ISBN 978-3-534-40588-6. [Google Scholar]
- Haboudane, D. Hyperspectral Vegetation Indices and Novel Algorithms for Predicting Green LAI of Crop Canopies: Modeling and Validation in the Context of Precision Agriculture. Remote Sens. Environ. 2004, 90, 337–352. [Google Scholar] [CrossRef]
- Towers, P.C.; Strever, A.; Poblete-Echeverría, C. Comparison of Vegetation Indices for Leaf Area Index Estimation in Vertical Shoot Positioned Vine Canopies with and without Grenbiule Hail-Protection Netting. Remote Sens. 2019, 11, 1073. [Google Scholar] [CrossRef] [Green Version]
- Vélez, S.; Barajas, E.; Rubio, J.A.; Vacas, R.; Poblete-Echeverría, C. Effect of Missing Vines on Total Leaf Area Determined by NDVI Calculated from Sentinel Satellite Data: Progressive Vine Removal Experiments. Appl. Sci. 2020, 10, 3612. [Google Scholar] [CrossRef]
- Giovos, R.; Tassopoulos, D.; Kalivas, D.; Lougkos, N.; Priovolou, A. Remote Sensing Vegetation Indices in Viticulture: A Critical Review. Agriculture 2021, 11, 457. [Google Scholar] [CrossRef]
- Hall, A.; Louis, J.P.; Lamb, D.W. Low-Resolution Remotely Sensed Images of Winegrape Vineyards Map Spatial Variability in Planimetric Canopy Area Instead of Leaf Area Index. Aust. J. Grape Wine Res. 2008, 14, 9–17. [Google Scholar] [CrossRef]
- Aboutalebi, M.; Torres-Rua, A.F.; Kustas, W.P.; Nieto, H.; Coopmans, C.; McKee, M. Assessment of Different Methods for Shadow Detection in High-Resolution Optical Imagery and Evaluation of Shadow Impact on Calculation of NDVI, and Evapotranspiration. Irrig. Sci. 2019, 37, 407–429. [Google Scholar] [CrossRef]
- Jiang, H.; Wang, S.; Cao, X.; Yang, C.; Zhang, Z.; Wang, X. A Shadow- Eliminated Vegetation Index (SEVI) for Removal of Self and Cast Shadow Effects on Vegetation in Rugged Terrains. Int. J. Digit. Earth 2019, 12, 1013–1029. [Google Scholar] [CrossRef]
- Vélez, S.; Poblete-Echeverría, C.; Rubio, J.A.; Vacas, R.; Barajas, E. Estimation of Leaf Area Index in Vineyards by Analysing Projected Shadows Using UAV Imagery. OENO One 2021, 55, 159–180. [Google Scholar] [CrossRef]
- Baeza, P.; Sánchez-De-Miguel, P.; Lissarrague, J.R. Radiation Balance in Vineyards. In Methodologies and Results in Grapevine Research; Delrot, S., Medrano, H., Or, E., Bavaresco, L., Grando, S., Eds.; Springer: Dordrecht, The Netherlands, 2010; pp. 21–29. ISBN 978-90-481-9282-3. [Google Scholar]
- Ferguson, L.; Haviland, D.R. Pistachio Production Manual; University of California: Davis, CA, USA, 2016; ISBN 1-60107-877-3. [Google Scholar]
- Hamilton, G.J. The Dependence of Volume Increment of Individual Trees on Dominance, Crown Dimensions, and Competition. Forestry 1969, 42, 133–144. [Google Scholar] [CrossRef]
- Caruso, G.; Zarco-Tejada, P.J.; González-Dugo, V.; Moriondo, M.; Tozzini, L.; Palai, G.; Rallo, G.; Hornero, A.; Primicerio, J.; Gucci, R. High-Resolution Imagery Acquired from an Unmanned Platform to Estimate Biophysical and Geometrical Parameters of Olive Trees under Different Irrigation Regimes. PLoS ONE 2019, 14, e0210804. [Google Scholar] [CrossRef] [Green Version]
- Gómez-Gálvez, F.J.; Pérez-Mohedano, D.; de la Rosa-Navarro, R.; Belaj, A. High-Throughput Analysis of the Canopy Traits in the Worldwide Olive Germplasm Bank of Córdoba Using Very High-Resolution Imagery Acquired from Unmanned Aerial Vehicle (UAV). Sci. Hortic. 2021, 278, 109851. [Google Scholar] [CrossRef]
- Sesar Joint Undertaking. European Drones Outlook Study: Unlocking the Value for Europe; Publications Office: London, UK, 2017. [Google Scholar]
- DJI Sciences and Technologies Ltd. Agricultural Drone Industry Insights Report (2021). Available online: https://www.dji.com/newsroom/news/agricultural-drone-industry-insights-report-2021 (accessed on 7 October 2022).
- Vélez, S.; Vacas, R.; Martín, H.; Ruano-Rosa, D.; Álvarez, S. High-Resolution UAV RGB Imagery Dataset for Precision Agriculture and 3D Photogrammetric Reconstruction Captured over a Pistachio Orchard (Pistacia vera L.) in Spain. Data 2022, 7, 157. [Google Scholar] [CrossRef]
- Meeus, J. Astronomical Algorithms, 2nd ed.; Willmann-Bell: Richmond, VA, USA, 1998; ISBN 978-0-943396-61-3. [Google Scholar]
- Kuhn, M. Building Predictive Models in R Using the Caret Package. J. Stat. Softw. 2008, 28, 5. [Google Scholar] [CrossRef] [Green Version]
- Conrad, O.; Bechtel, B.; Bock, M.; Dietrich, H.; Fischer, E.; Gerlitz, L.; Wehberg, J.; Wichmann, V.; Böhner, J. System for Automated Geoscientific Analyses (SAGA) v. 2.1.4. Geosci. Model Dev. 2015, 8, 1991–2007. [Google Scholar] [CrossRef] [Green Version]
- Li, J. Assessing the Accuracy of Predictive Models for Numerical Data: Not r nor R2, Why Not? Then What? PLoS ONE 2017, 12, e0183250. [Google Scholar] [CrossRef] [Green Version]
- Wagenmakers, P.S.; Callesen, O. Light Distribution in Apple Orchard Systems in Relation to Production and Fruit Quality. J. Hortic. Sci. 1995, 70, 935–948. [Google Scholar] [CrossRef]
- Fleck, S.; Mölder, I.; Jacob, M.; Gebauer, T.; Jungkunst, H.F.; Leuschner, C. Comparison of Conventional Eight-Point Crown Projections with LIDAR-Based Virtual Crown Projections in a Temperate Old-Growth Forest. Ann. For. Sci. 2011, 68, 1173–1185. [Google Scholar] [CrossRef]
- Barber, C.B.; Dobkin, D.P.; Huhdanpaa, H. The Quickhull Algorithm for Convex Hulls. ACM Trans. Math. Softw. 1996, 22, 469–483. [Google Scholar] [CrossRef] [Green Version]
- Yan, Z.; Liu, R.; Cheng, L.; Zhou, X.; Ruan, X.; Xiao, Y. A Concave Hull Methodology for Calculating the Crown Volume of Individual Trees Based on Vehicle-Borne LiDAR Data. Remote Sens. 2019, 11, 623. [Google Scholar] [CrossRef] [Green Version]
- Wang, D.; Song, H.; Tie, Z.; Zhang, W.; He, D. Recognition and Localization of Occluded Apples Using K-Means Clustering Algorithm and Convex Hull Theory: A Comparison. Multimed. Tools Appl. 2016, 75, 3177–3198. [Google Scholar] [CrossRef]
- Zhu, Z.; Kleinn, C.; Nölke, N. Towards Tree Green Crown Volume: A Methodological Approach Using Terrestrial Laser Scanning. Remote Sens. 2020, 12, 1841. [Google Scholar] [CrossRef]
- Lin, W.; Meng, Y.; Qiu, Z.; Zhang, S.; Wu, J. Measurement and Calculation of Crown Projection Area and Crown Volume of Individual Trees Based on 3D Laser-Scanned Point-Cloud Data. Int. J. Remote Sens. 2017, 38, 1083–1100. [Google Scholar] [CrossRef]
- Raven, P.H.; Evert, R.F.; Eichhorn, S.E. Biology of Plants, 8th ed.; W.H. Freeman and Company Publishers: New York, NY, USA, 2013; ISBN 978-1-4292-1961-7. [Google Scholar]
- Keller, M. The Science of Grapevines: Anatomy and Physiology, 2nd ed.; Elsevier: Amsterdam, The Netherlands, 2015; ISBN 978-0-12-419987-3. [Google Scholar]
- Faridhouseini, A.; Mianabadi, A.; Bannayan, M.; Alizadeh, A. Lidar Remote Sensing for Forestry and Terrestrial Applications. Int. J. Appl. Environ. Sci. 2011, 74, 99–114. [Google Scholar]
- Comba, L.; Biglia, A.; Ricauda Aimonino, D.; Tortia, C.; Mania, E.; Guidoni, S.; Gay, P. Leaf Area Index Evaluation in Vineyards Using 3D Point Clouds from UAV Imagery. Precis. Agric. 2020, 21, 881–896. [Google Scholar] [CrossRef] [Green Version]
- Jurado, J.M.; Pádua, L.; Feito, F.R.; Sousa, J.J. Automatic Grapevine Trunk Detection on UAV-Based Point Cloud. Remote Sens. 2020, 12, 3043. [Google Scholar] [CrossRef]
- Jurado, J.M.; Ortega, L.; Cubillas, J.J.; Feito, F.R. Multispectral Mapping on 3D Models and Multi-Temporal Monitoring for Individual Characterization of Olive Trees. Remote Sens. 2020, 12, 1106. [Google Scholar] [CrossRef] [Green Version]
- Ghanbari Parmehr, E.; Amati, M. Individual Tree Canopy Parameters Estimation Using UAV-Based Photogrammetric and LiDAR Point Clouds in an Urban Park. Remote Sens. 2021, 13, 2062. [Google Scholar] [CrossRef]
- Xie, X.; Yang, W.; Cao, G.; Yang, J.; Zhao, Z.; Chen, S.; Liao, Q.; Shi, G. Real-Time Vehicle Detection from UAV Imagery. In Proceedings of the 2018 IEEE Fourth International Conference on Multimedia Big Data (BigMM), Xi’an, China, 13–16 September 2018; pp. 1–5. [Google Scholar]
- Sheppard, C.; Rahnemoonfar, M. Real-Time Scene Understanding for UAV Imagery Based on Deep Convolutional Neural Networks. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 2243–2246. [Google Scholar]
- Mishra, P.; Sadeh, R.; Bino, E.; Polder, G.; Boer, M.P.; Rutledge, D.N.; Herrmann, I. Complementary Chemometrics and Deep Learning for Semantic Segmentation of Tall and Wide Visible and Near-Infrared Spectral Images of Plants. Comput. Electron. Agric. 2021, 186, 106226. [Google Scholar] [CrossRef]
- Chen, C.J.; Zhang, Z. GRID: A Python Package for Field Plot Phenotyping Using Aerial Images. Remote Sens. 2020, 12, 1697. [Google Scholar] [CrossRef]
- Mardanisamani, S.; Eramian, M. Segmentation of Vegetation and Microplots in Aerial Agriculture Images: A Survey. Plant Phenome J. 2022, 5, 42. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Flight Time 11:23 | Solar Noon | Sunset | Sunrise | |
|---|---|---|---|---|---|
 | Azimuth (α) | 106.24° | 180 | 295.94 | 63.94 |
 | Elevation (β) | 45.0° | 67.18 | −0.46 | −0.34 |
 | Shadow ratio | 1:1 | 1:0.42 | Not visible | Not visible |
| Tree | h (m) | a (m) | b (m) | c (m) | Av.d. (m) | V.s. (m³) | V.e. (m³) |
|---|---|---|---|---|---|---|---|
| 1 | 1.02 | 1.86 | 2.81 | 2.86 | 2.51 | 8.28 | 7.83 |
| 2 | 1.1 | 1.83 | 2.92 | 2.77 | 2.51 | 8.25 | 7.75 |
| 3 | 0.98 | 1.64 | 2.86 | 2.65 | 2.38 | 7.09 | 6.51 |
| 4 | 1.01 | 1.36 | 1.92 | 2.06 | 1.78 | 2.95 | 2.82 |
| 5 | 1.02 | 1.79 | 2.98 | 2.76 | 2.51 | 8.28 | 7.71 |
| 6 | 0.9 | 1.56 | 2.68 | 2.45 | 2.23 | 5.81 | 5.36 |
| 7 | 0.99 | 1.96 | 2.8 | 2.99 | 2.58 | 9.03 | 8.59 |
| 8 | 0.97 | 1.38 | 2.27 | 2.36 | 2.00 | 4.21 | 3.87 |
| 9 | 0.98 | 1.91 | 2.78 | 3.32 | 2.67 | 9.97 | 9.23 |
| 10 | 0.99 | 1.26 | 1.86 | 1.97 | 1.70 | 2.56 | 2.42 |
| 11 | 0.95 | 1.21 | 1.98 | 2.12 | 1.77 | 2.90 | 2.66 |
| 12 | 0.81 | 1.08 | 1.6 | 1.88 | 1.52 | 1.84 | 1.70 |
| 13 | 0.97 | 1.26 | 1.74 | 2.07 | 1.69 | 2.53 | 2.38 |
| 14 | 0.81 | 1.34 | 2.11 | 2.34 | 1.93 | 3.76 | 3.46 |
| 15 | 1.02 | 1.43 | 2.28 | 2.18 | 1.96 | 3.96 | 3.72 |
| 16 | 0.92 | 1.5 | 2.07 | 1.96 | 1.84 | 3.28 | 3.19 |
| 17 | 0.88 | 1.82 | 2.51 | 3.46 | 2.60 | 9.17 | 8.28 |
| 18 | 0.89 | 1.52 | 2.15 | 1.95 | 1.87 | 3.44 | 3.34 |
| 19 | 0.9 | 1.94 | 3.42 | 2.92 | 2.76 | 11.01 | 10.14 |
| 20 | 0.9 | 1.88 | 3.32 | 3.27 | 2.82 | 11.78 | 10.69 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vélez, S.; Vacas, R.; Martín, H.; Ruano-Rosa, D.; Álvarez, S. A Novel Technique Using Planar Area and Ground Shadows Calculated from UAV RGB Imagery to Estimate Pistachio Tree (Pistacia vera L.) Canopy Volume. Remote Sens. 2022, 14, 6006. https://doi.org/10.3390/rs14236006
Vélez S, Vacas R, Martín H, Ruano-Rosa D, Álvarez S. A Novel Technique Using Planar Area and Ground Shadows Calculated from UAV RGB Imagery to Estimate Pistachio Tree (Pistacia vera L.) Canopy Volume. Remote Sensing. 2022; 14(23):6006. https://doi.org/10.3390/rs14236006
Chicago/Turabian StyleVélez, Sergio, Rubén Vacas, Hugo Martín, David Ruano-Rosa, and Sara Álvarez. 2022. "A Novel Technique Using Planar Area and Ground Shadows Calculated from UAV RGB Imagery to Estimate Pistachio Tree (Pistacia vera L.) Canopy Volume" Remote Sensing 14, no. 23: 6006. https://doi.org/10.3390/rs14236006