
Joint Characterization of Sentinel-2 Reflectance: Insights from Manifold Learning



Abstract
:1. Introduction
- Geophysical
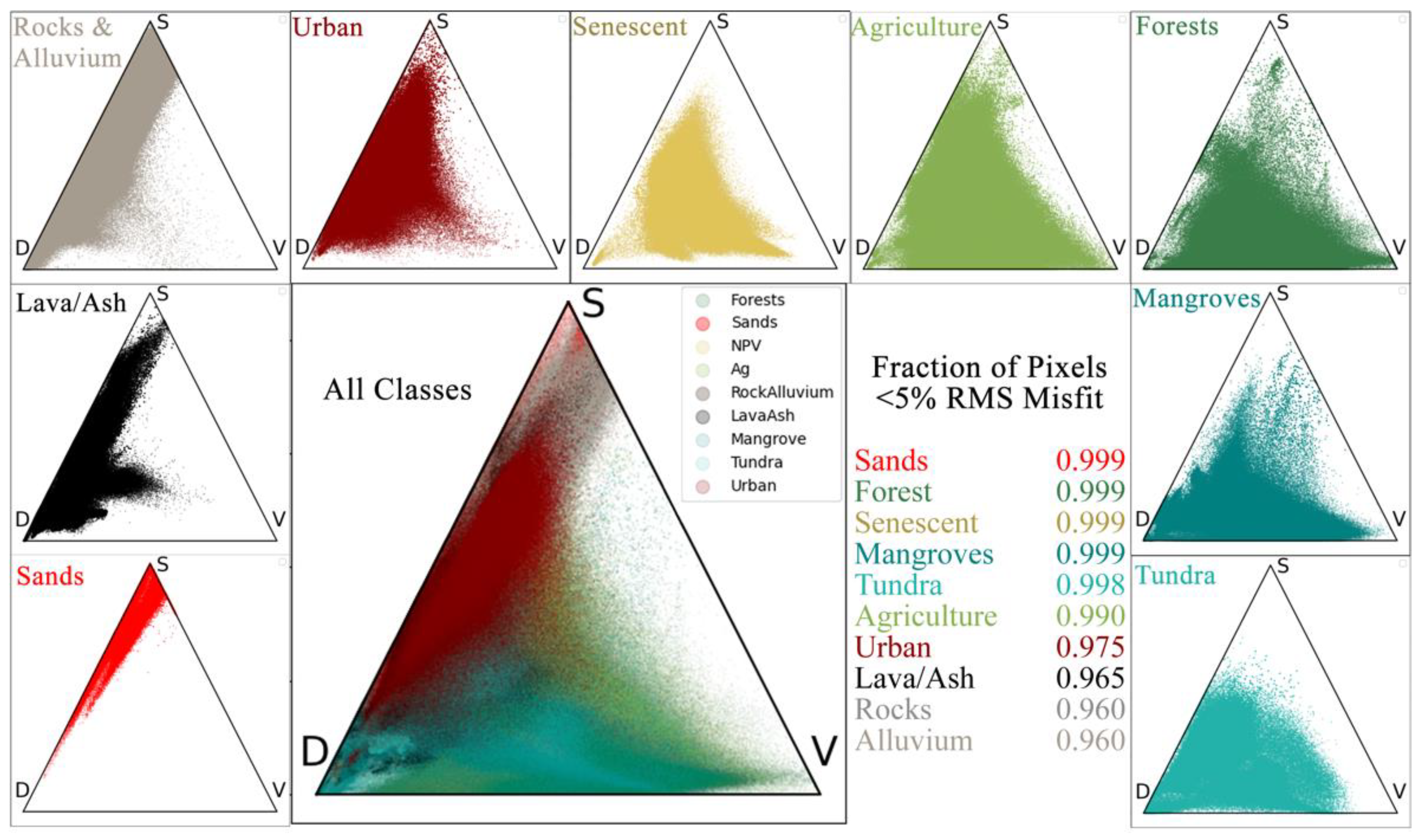
- What is the overall S,V,D fraction distribution of globally diverse representatives of significant land cover categories?
- How well does the global S,V,D model fit each land cover category, as measured by root mean square misfit?
- Topological
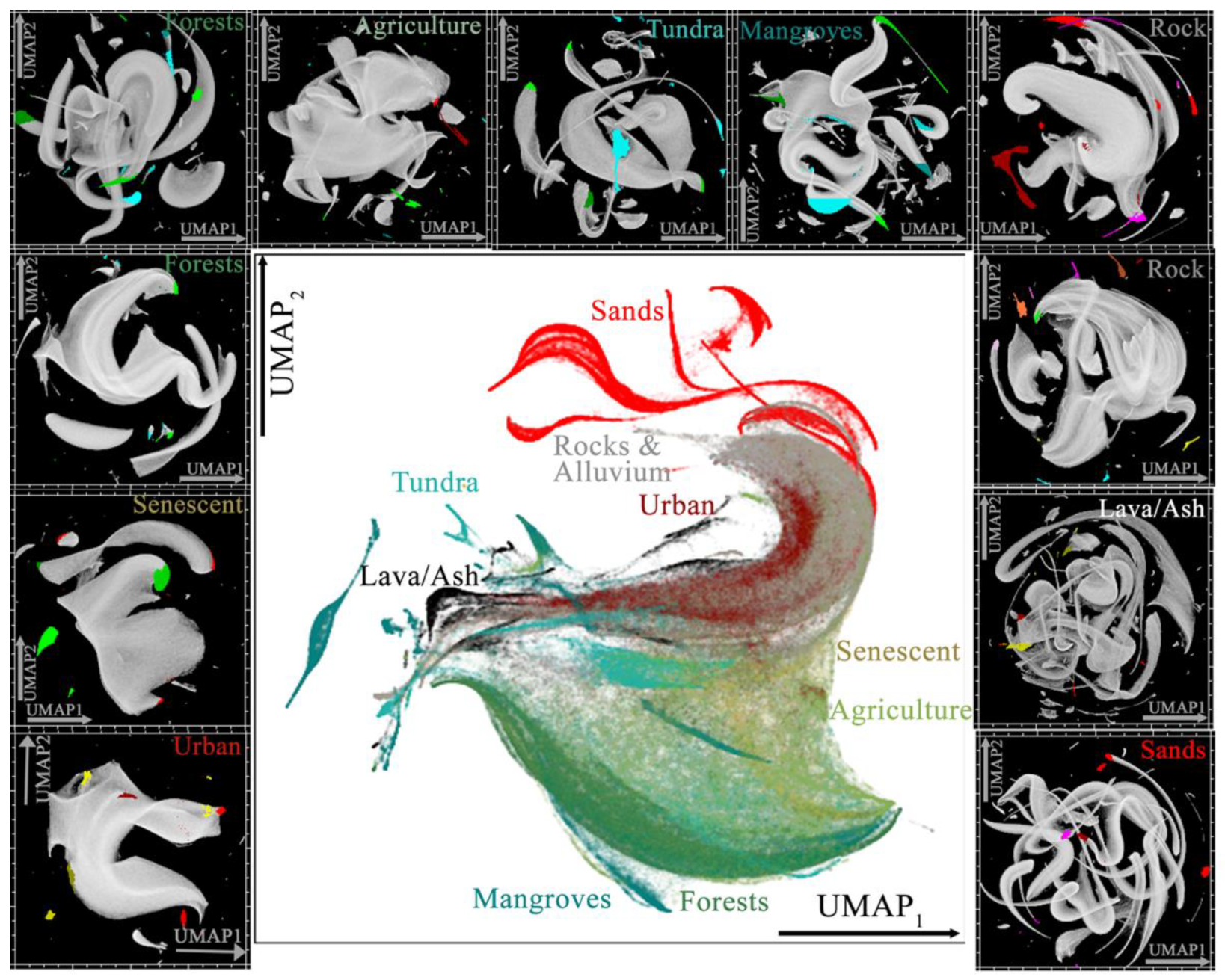
- How clustered or continuous are the manifolds for each land cover category found by UMAP?
- Joint
- To what extent can S,V,D fractions and UMAP clusters be used together to yield useful information? Specifically,
- i.
- To what extent are UMAP clusters geographically contiguous?
- ii.
- To what extent do disparate UMAP clusters at similar S,V,D fraction values represent physically plausible and/or spectroscopically interpretable spectral variability?
- iii.
- Are some S,V,D fractions, or land cover classes, better suited to JC than others? If so, why? If not, why not?
2. Materials and Methods
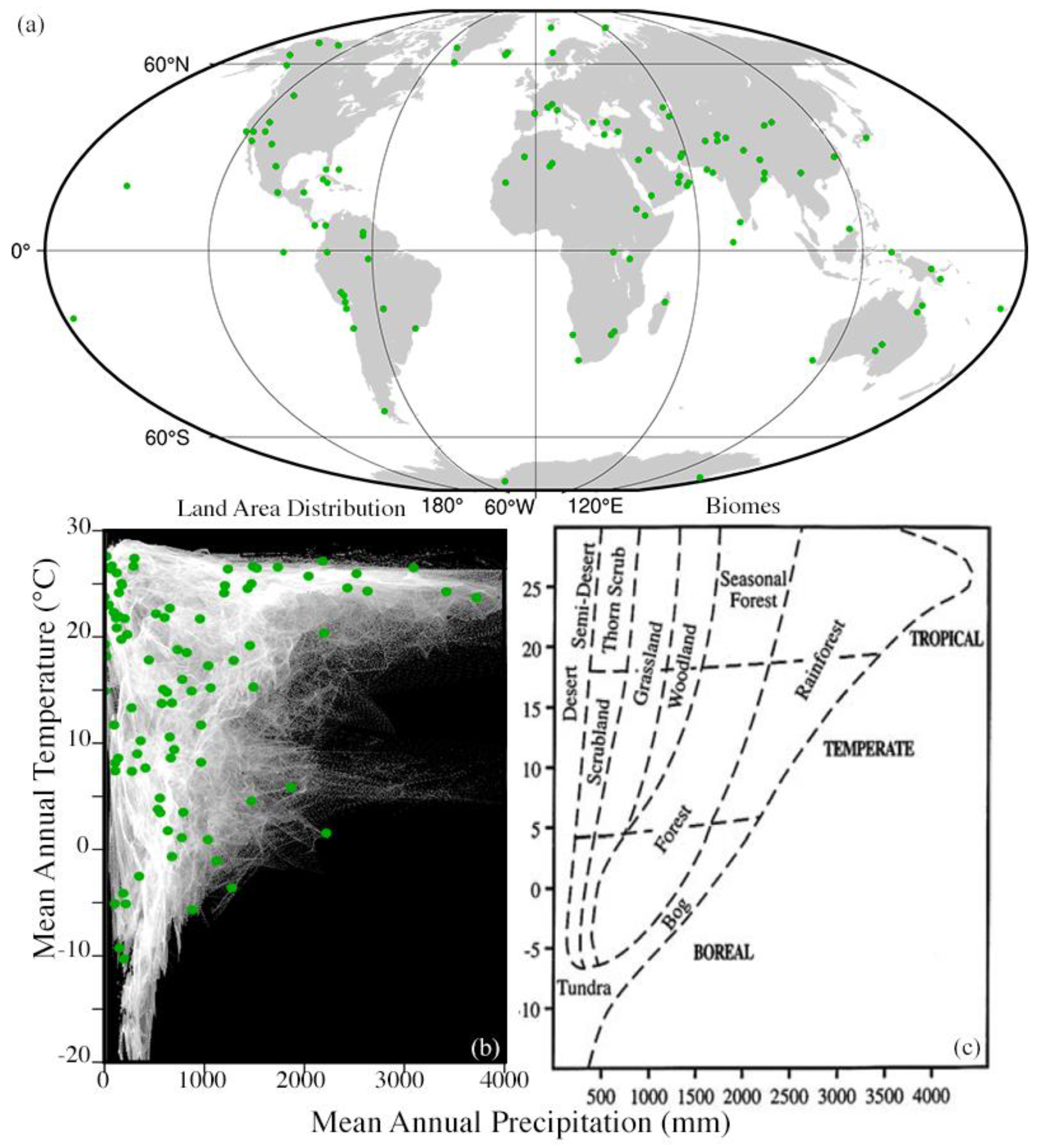
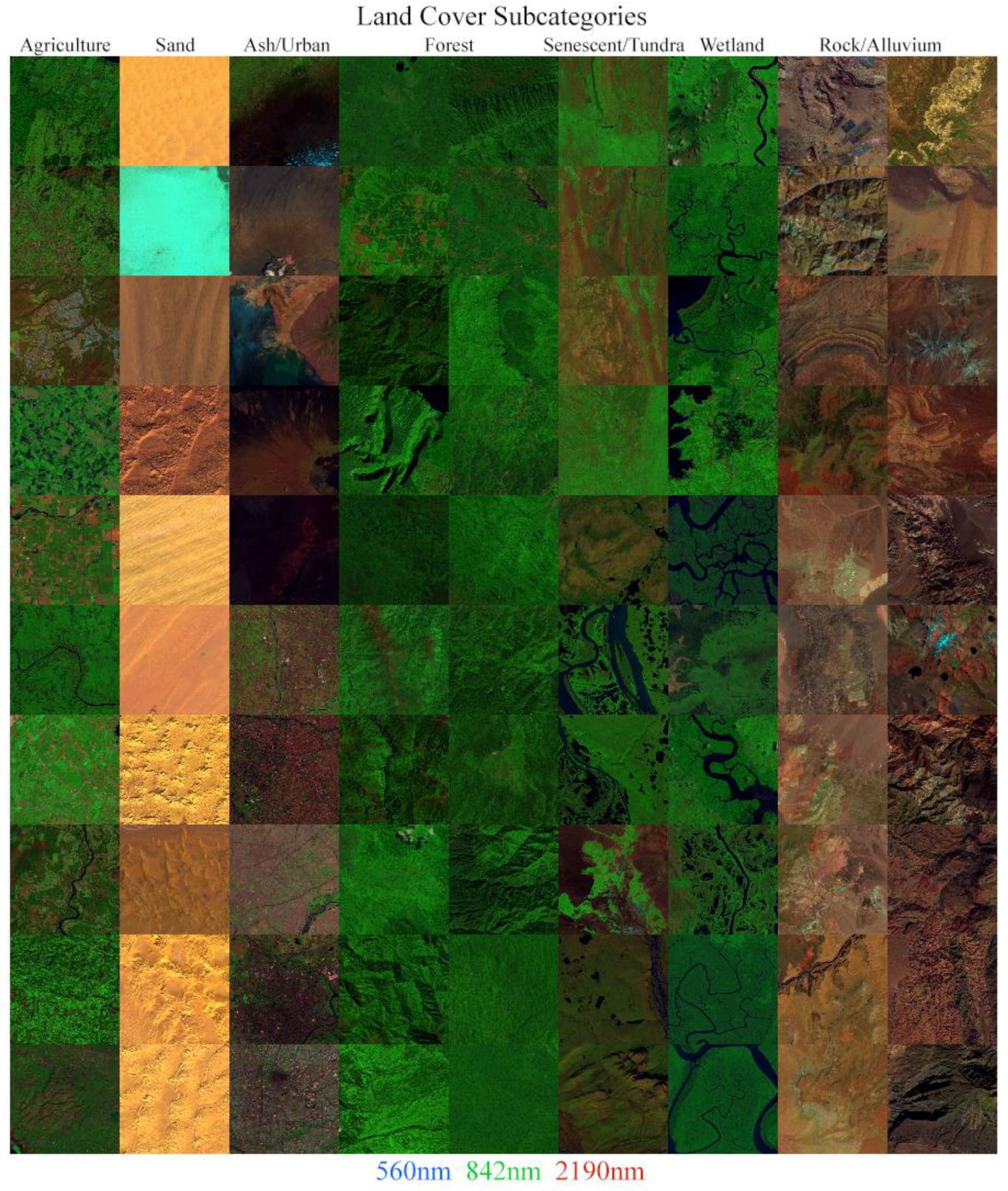
2.1. Data
2.2. Methods
- Use a linear spectral mixture model to characterize the overall S,V,D distribution of each land cover class (variance-based, physical, linear).
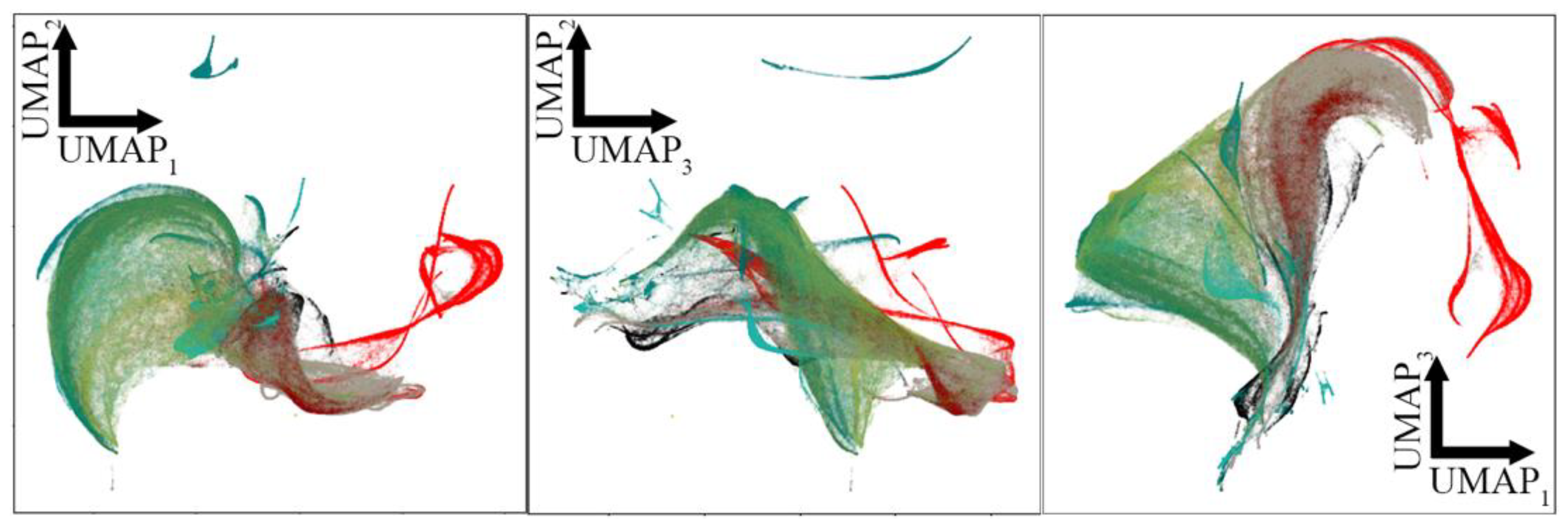
- Use Uniform Manifold Approximation and Projection (UMAP; [33]) to characterize interdimensional topology & clustering (topology-based, statistical, nonlinear)
- Synthesize Steps A and B into a set of 1 or more bivariate distributions which use the physical meaning of the Step A fraction distributions to differentiate among purely topological relations identified from Step B (joint characterization).
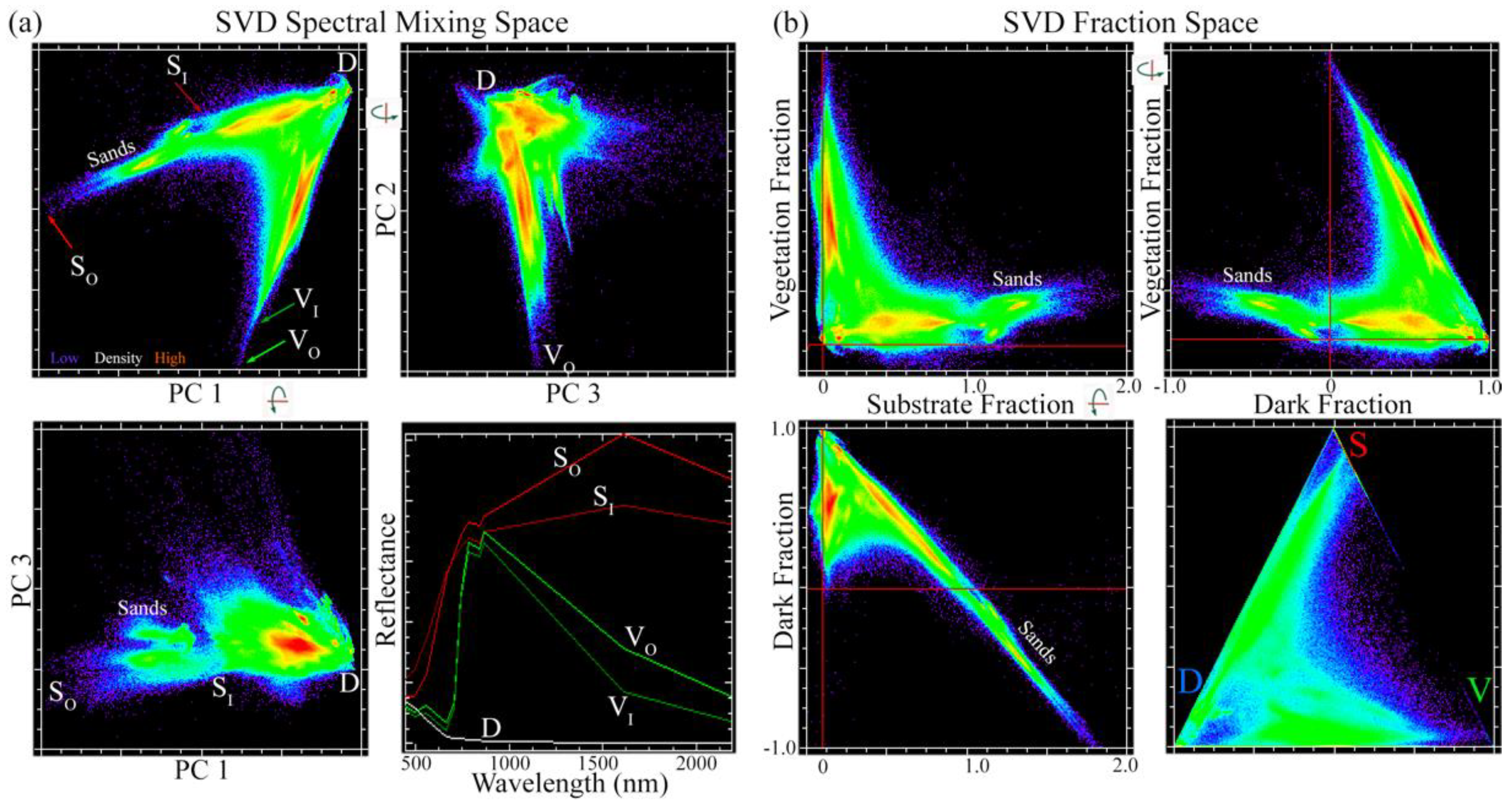
2.2.1. Step A: Linear Characterization and Modeling: Spectral Mixture Analysis
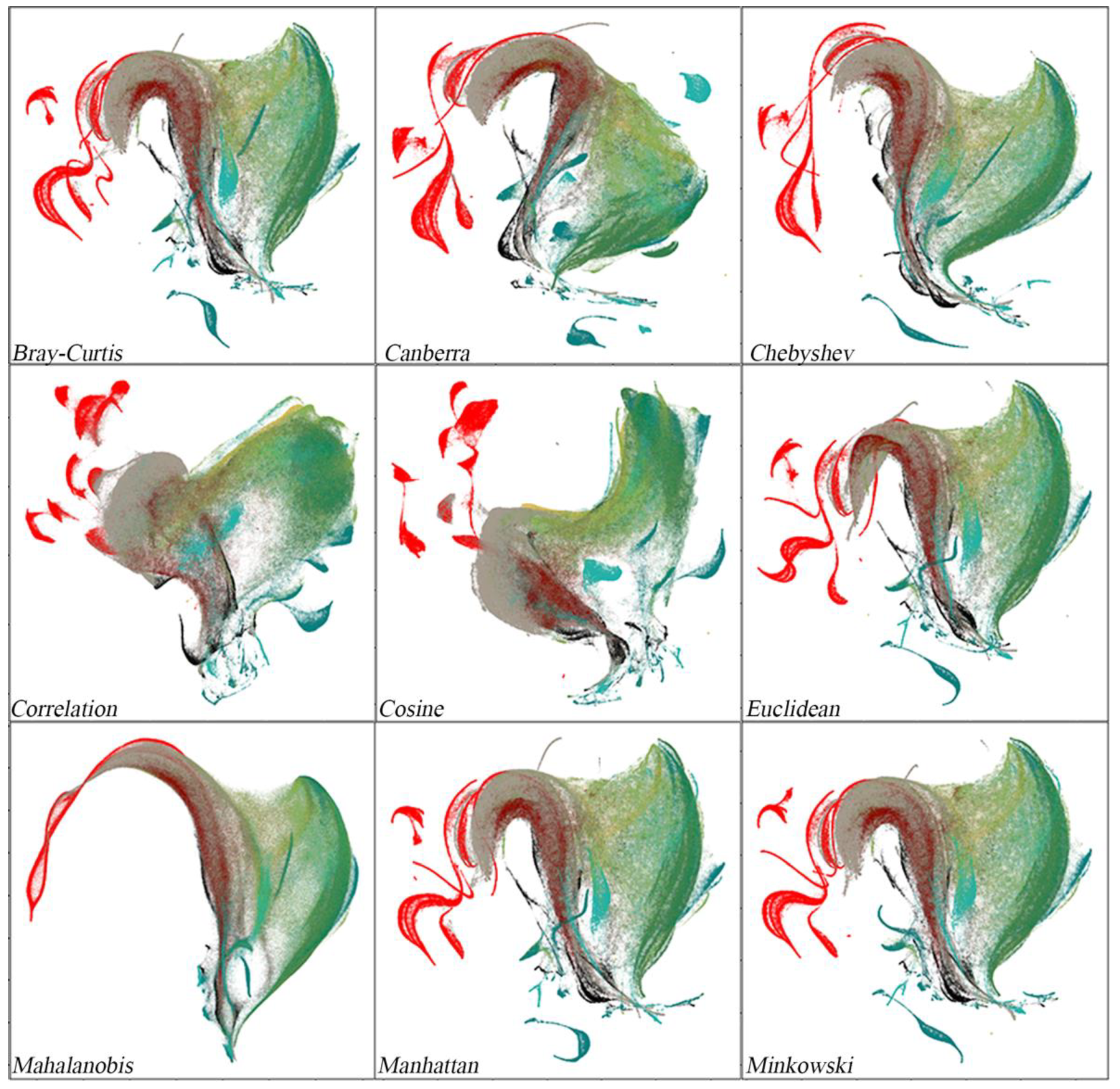
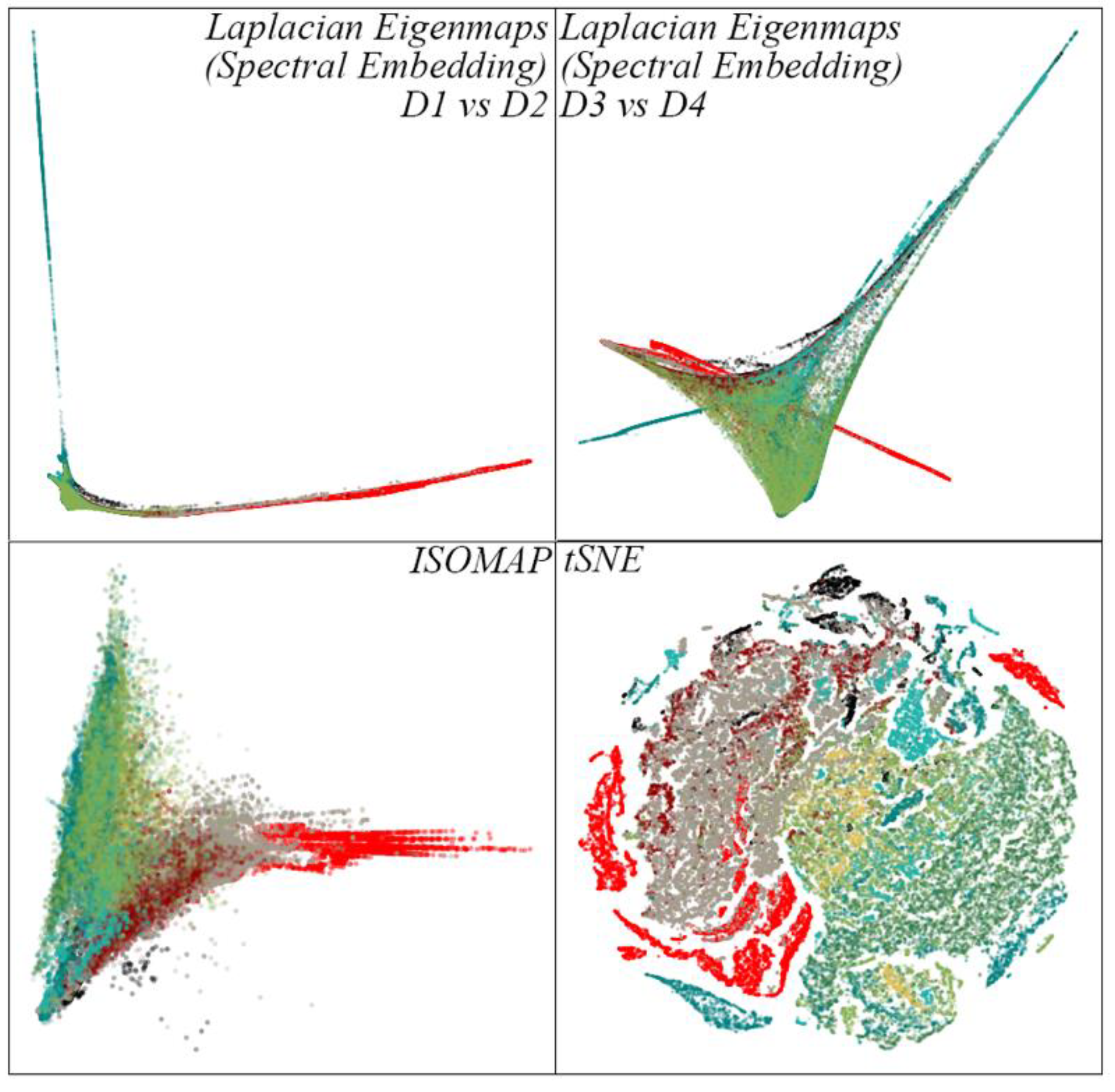
2.2.2. Step B: Nonlinear Characterization and Modeling: Manifold Learning
- -
- n_components: The number of dimensions of the low-D embedding space.
- -
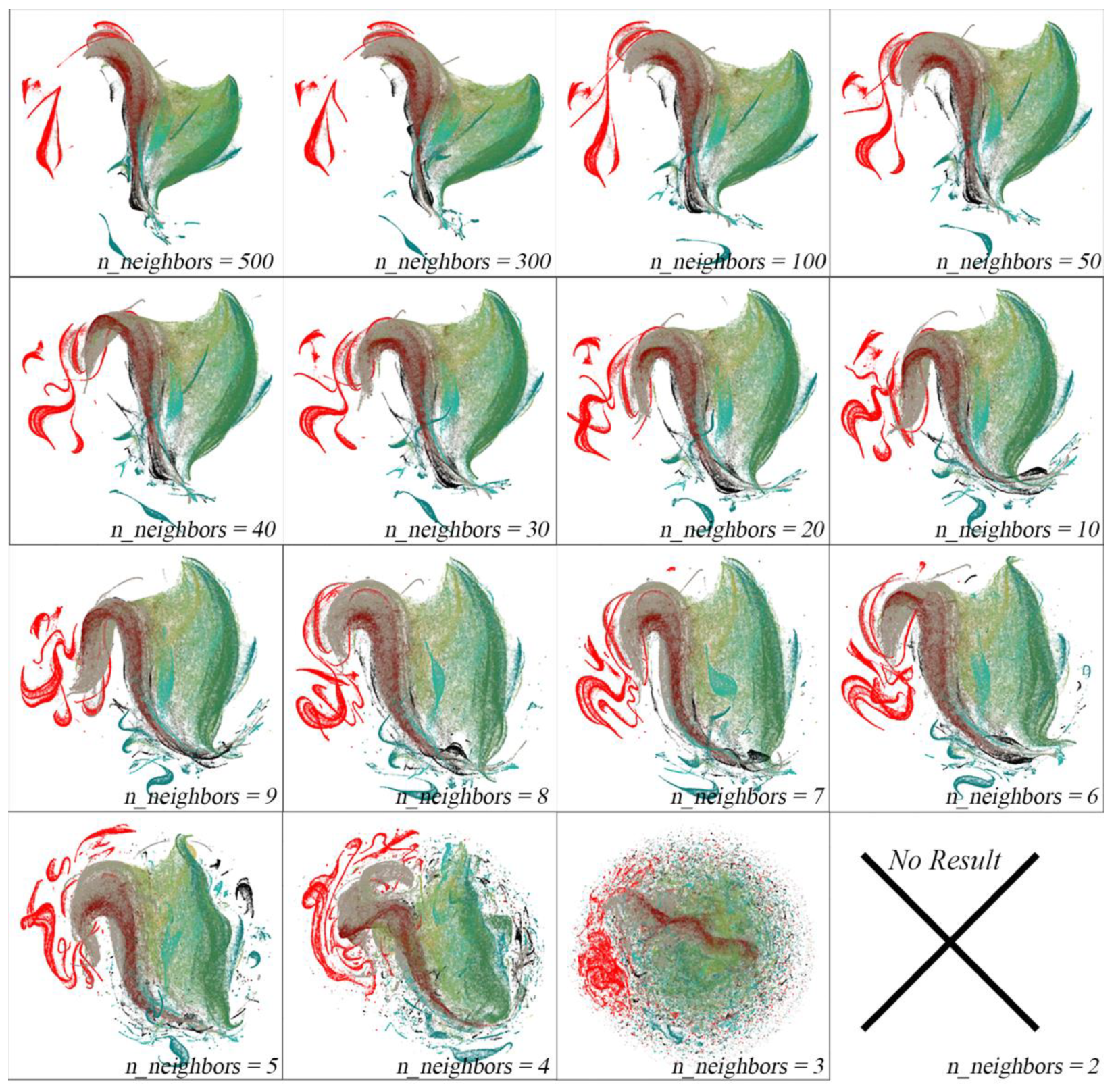
- n_neighbors: The size of the local neighborhood used when learning the manifold structure of the data.
- -
- min_dist: The limit on how closely points may be spaced in the output space.
- -
- metric: The distance metric in the input space.
- -
- n_components = 2
- -
- n_neighbors = 30
- -
- min_dist = 0.1
- -
- metric = Euclidean
2.2.3. Step C: Joint Characterization: Bivariate Distributions and Cluster Identification
3. Results
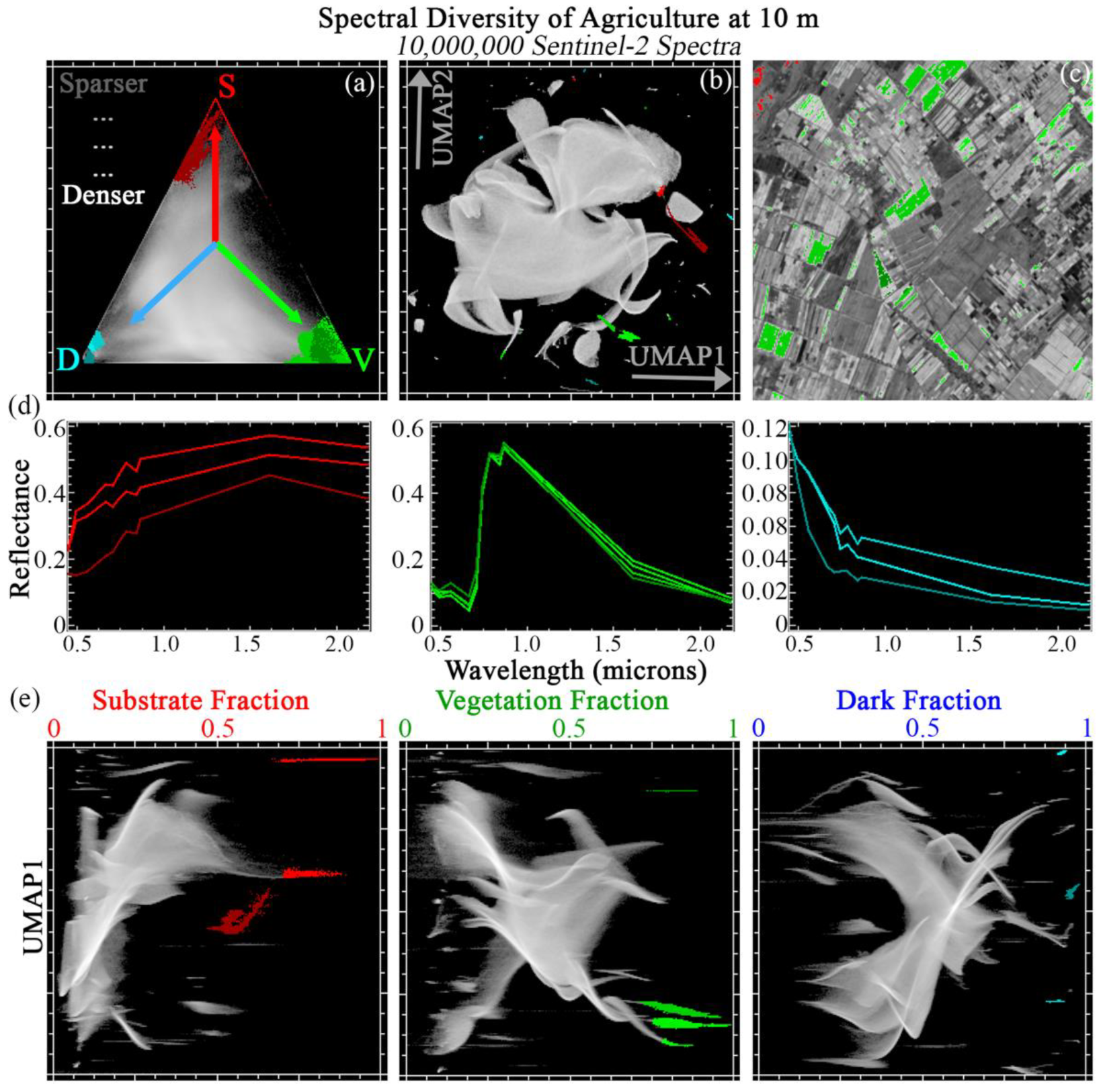
3.1. Agriculture
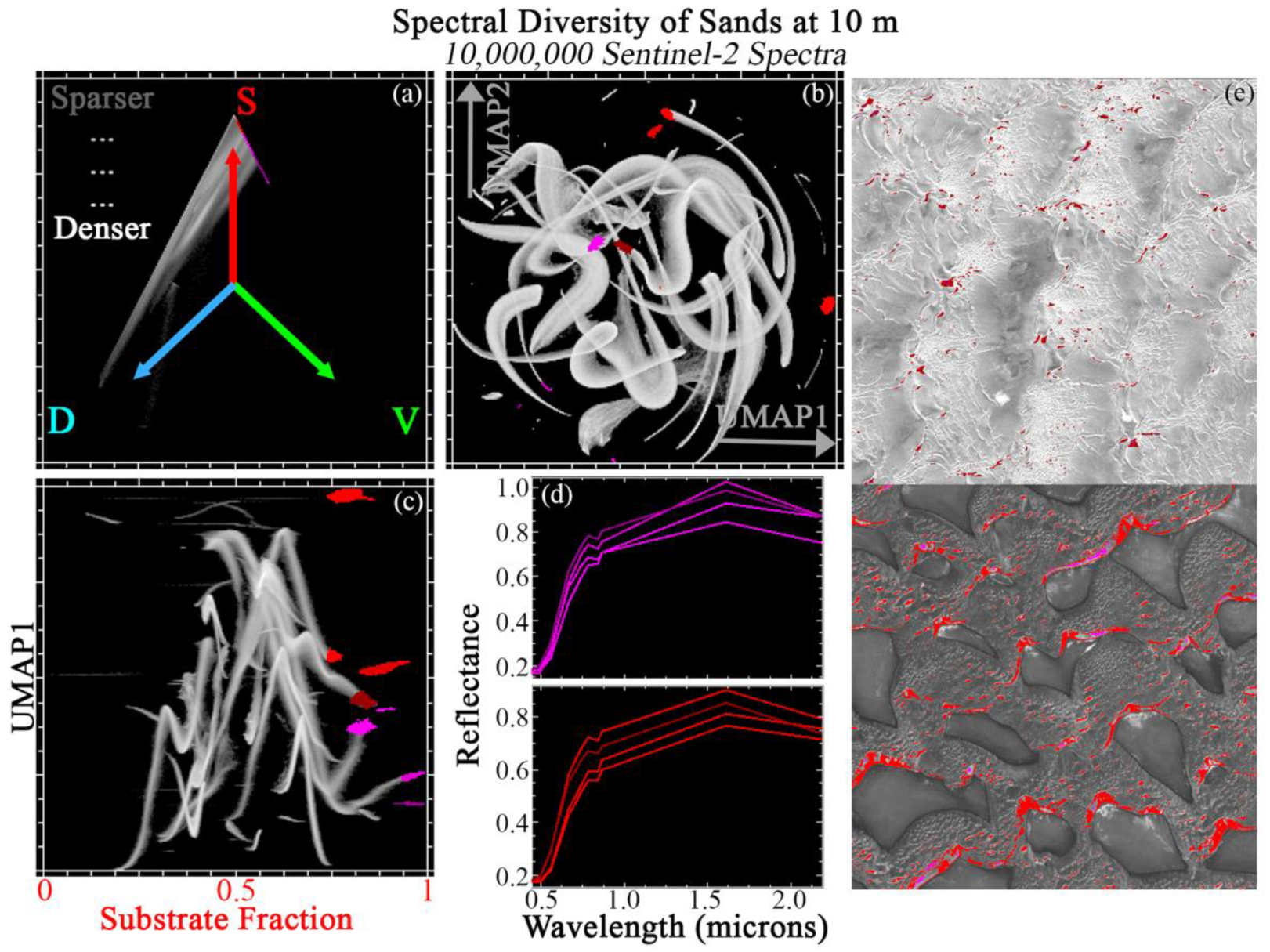
3.2. Sands
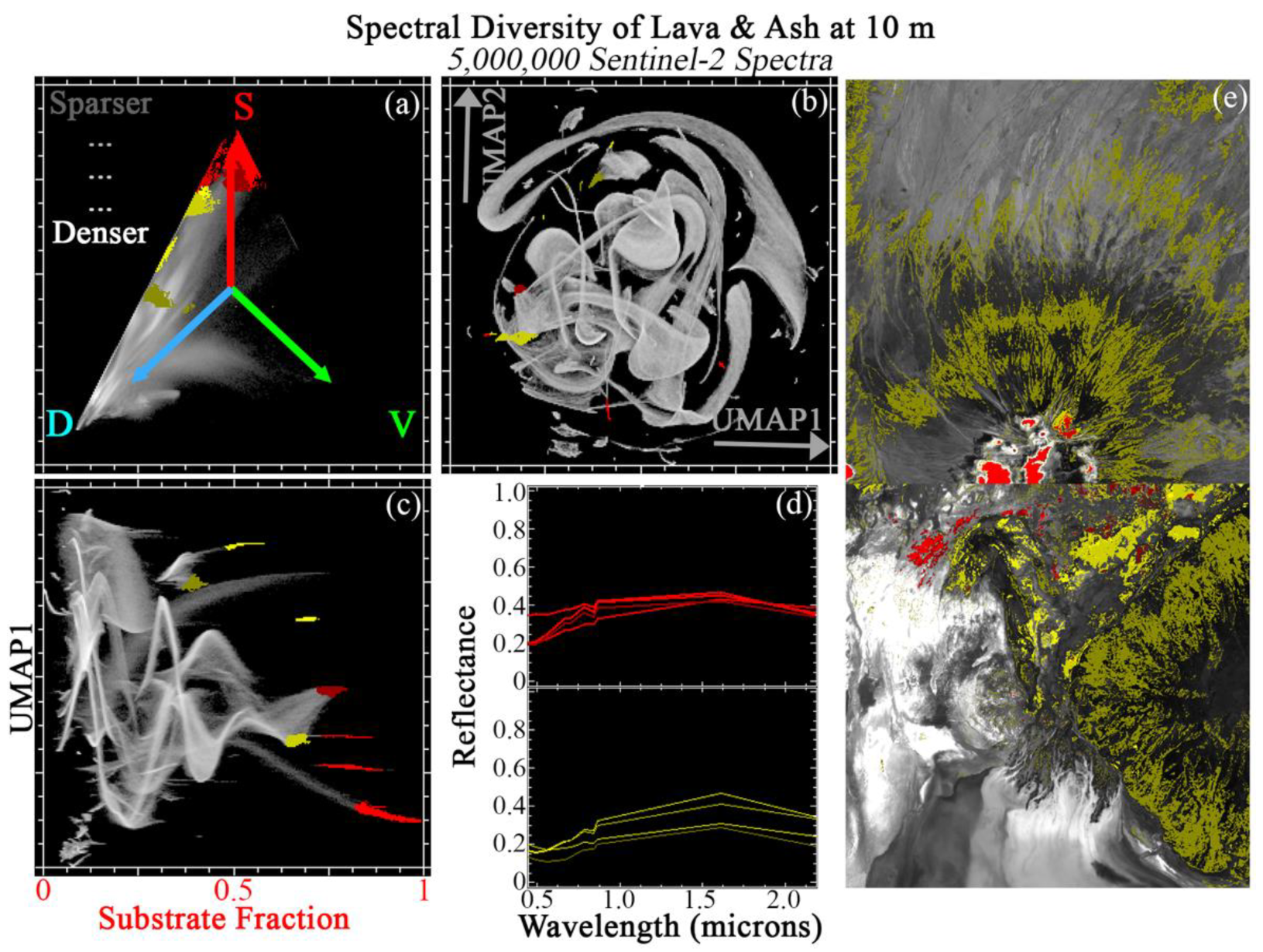
3.3. Lava and Ash
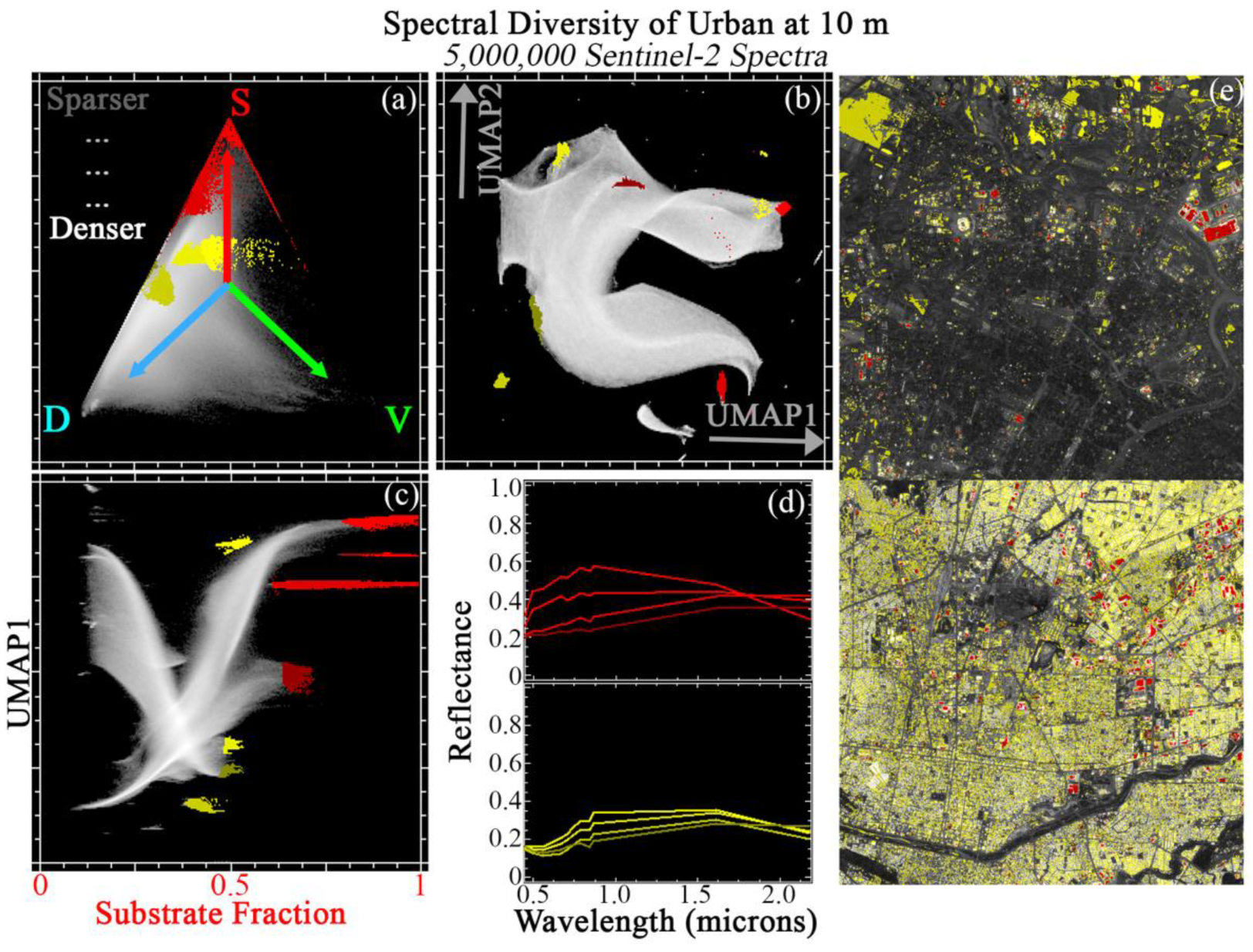
3.4. Urban
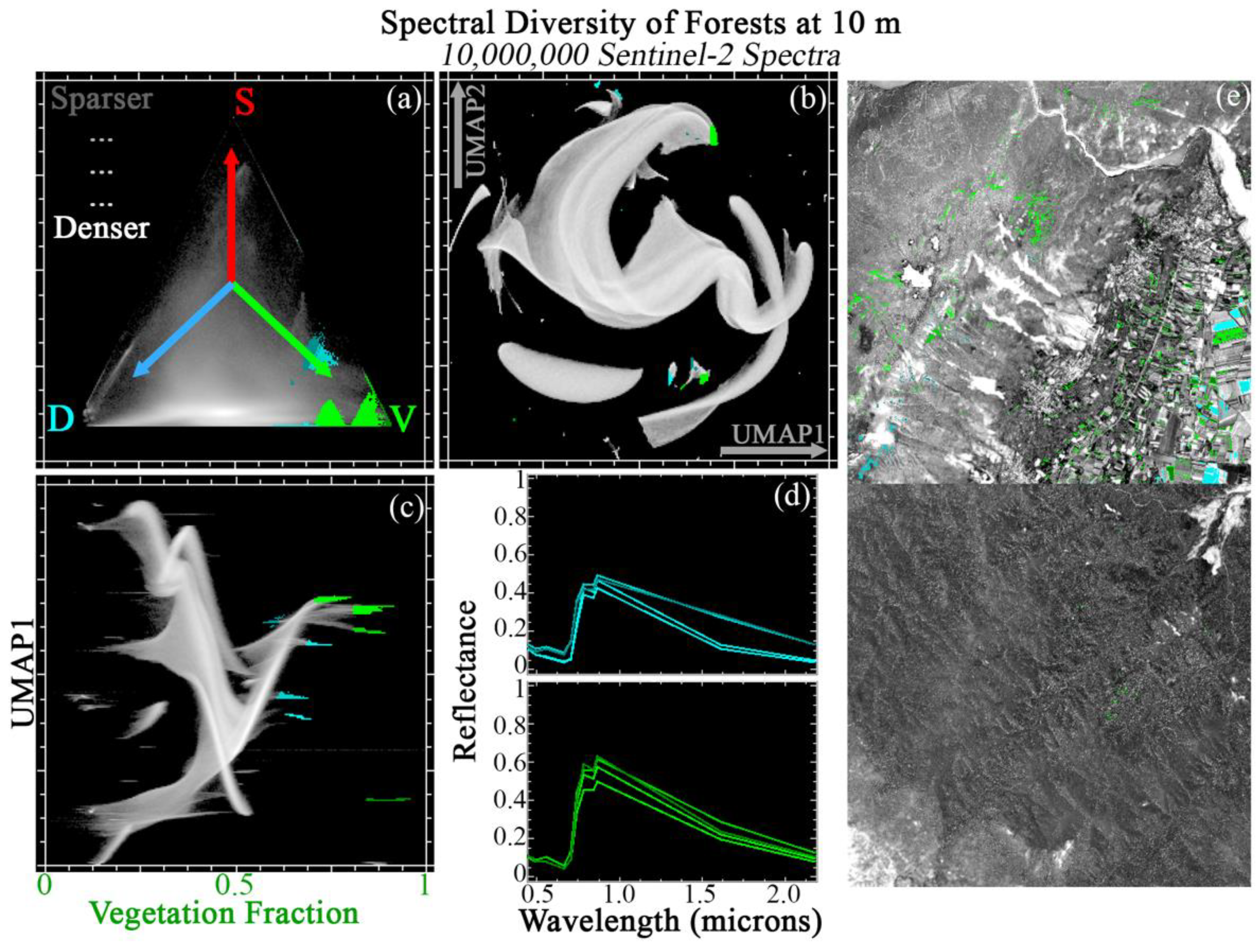
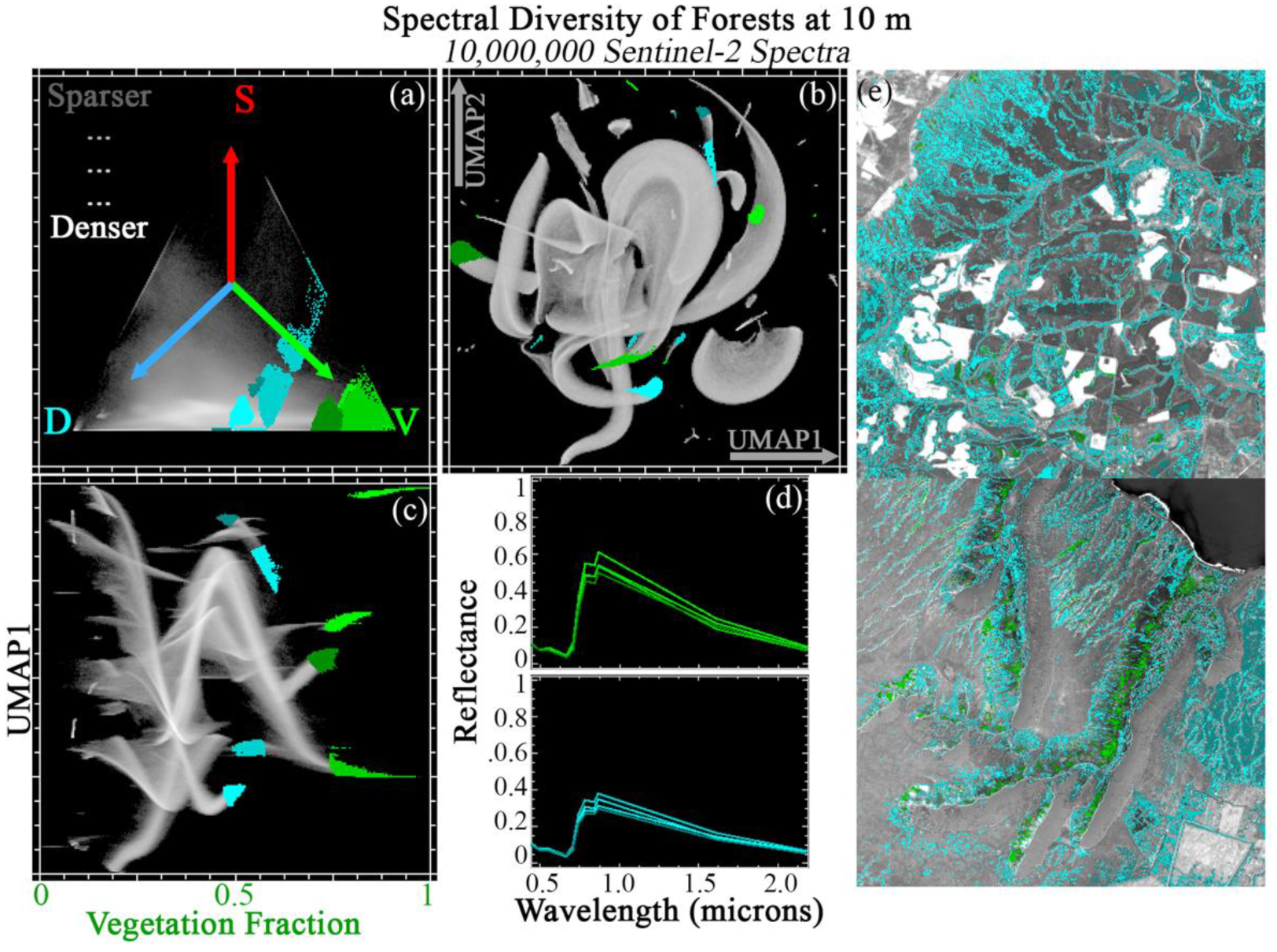
3.5. Forests
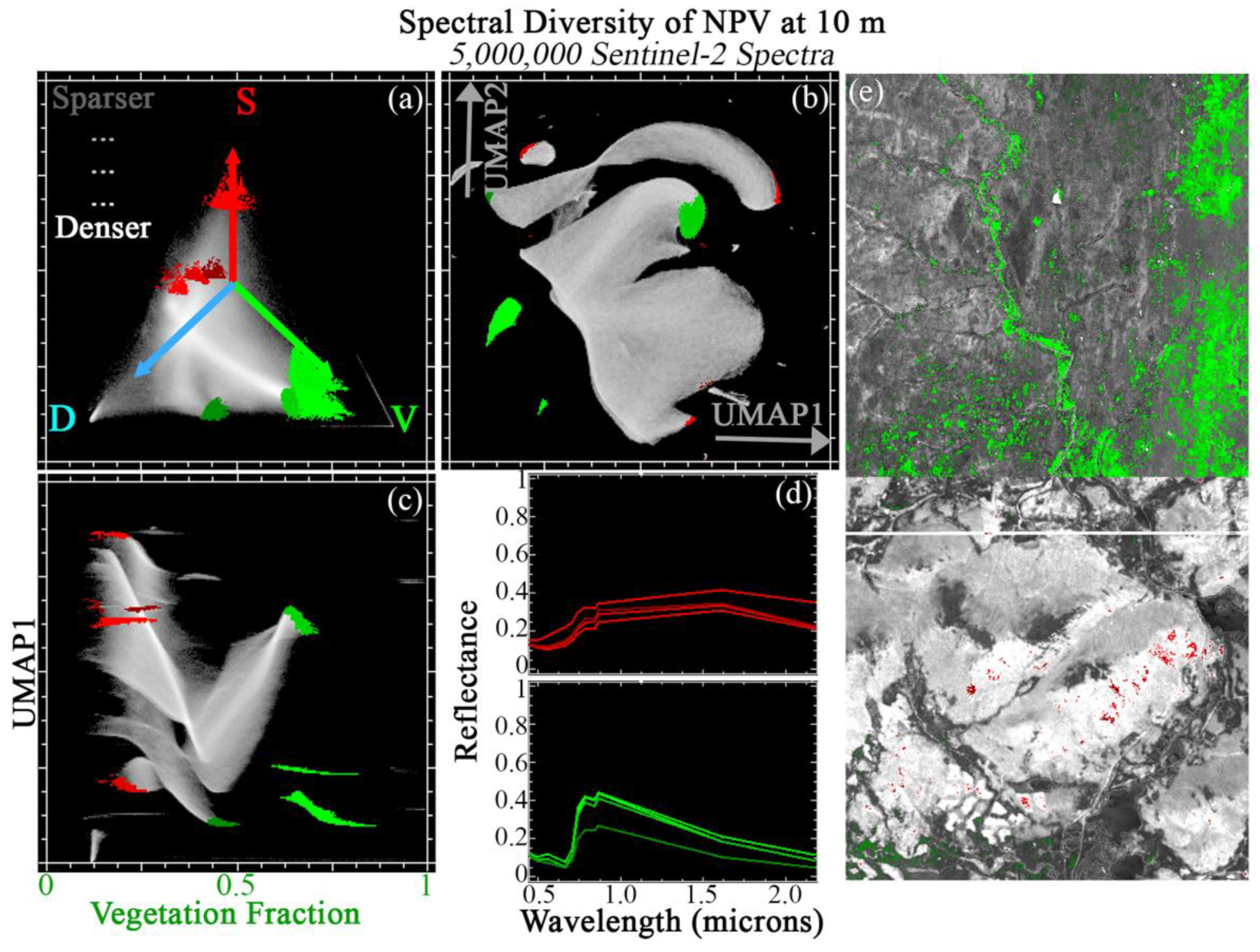
3.6. Senescent Vegetation
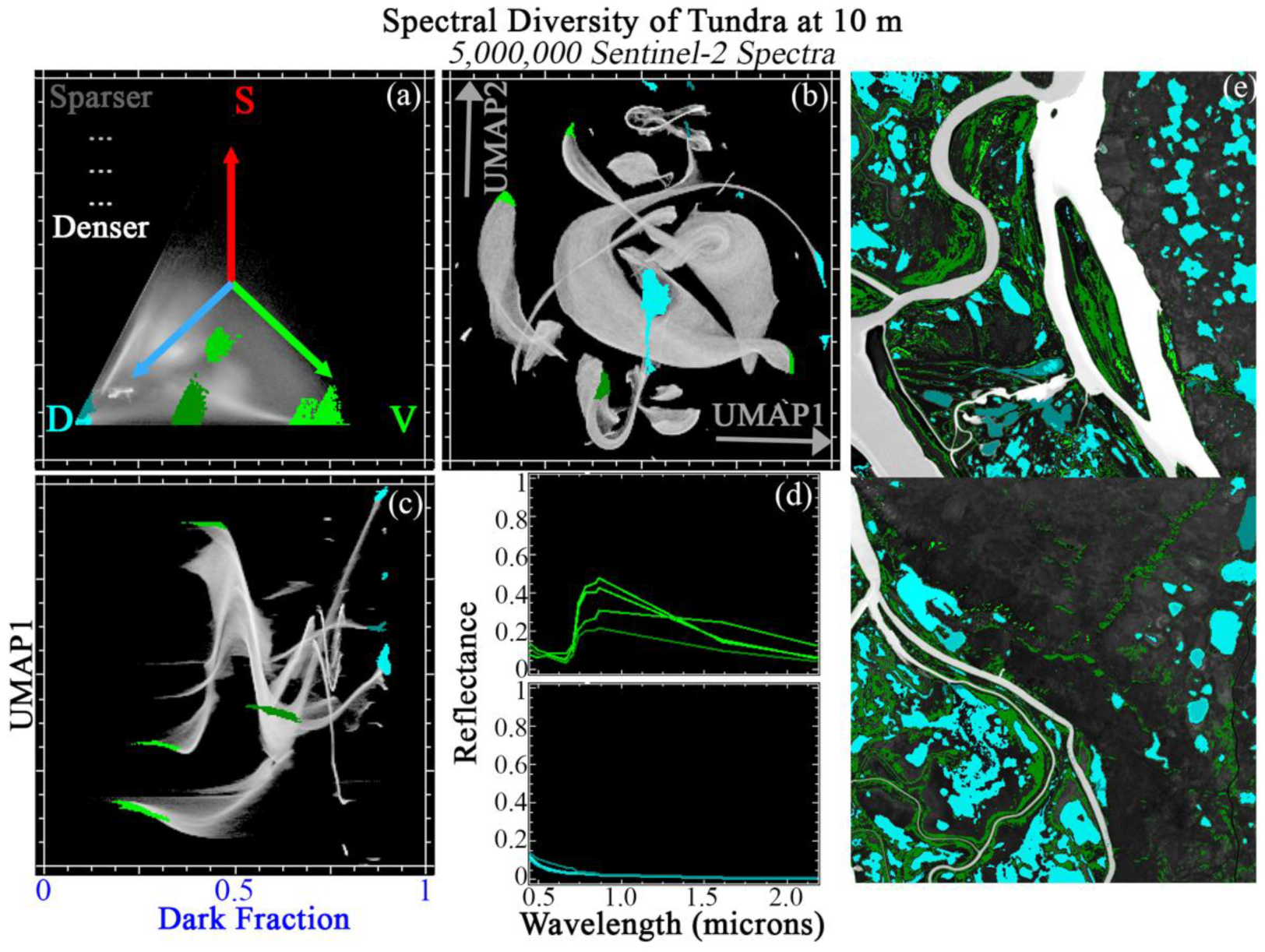
3.7. Tundra
3.8. Mangroves and Wetlands
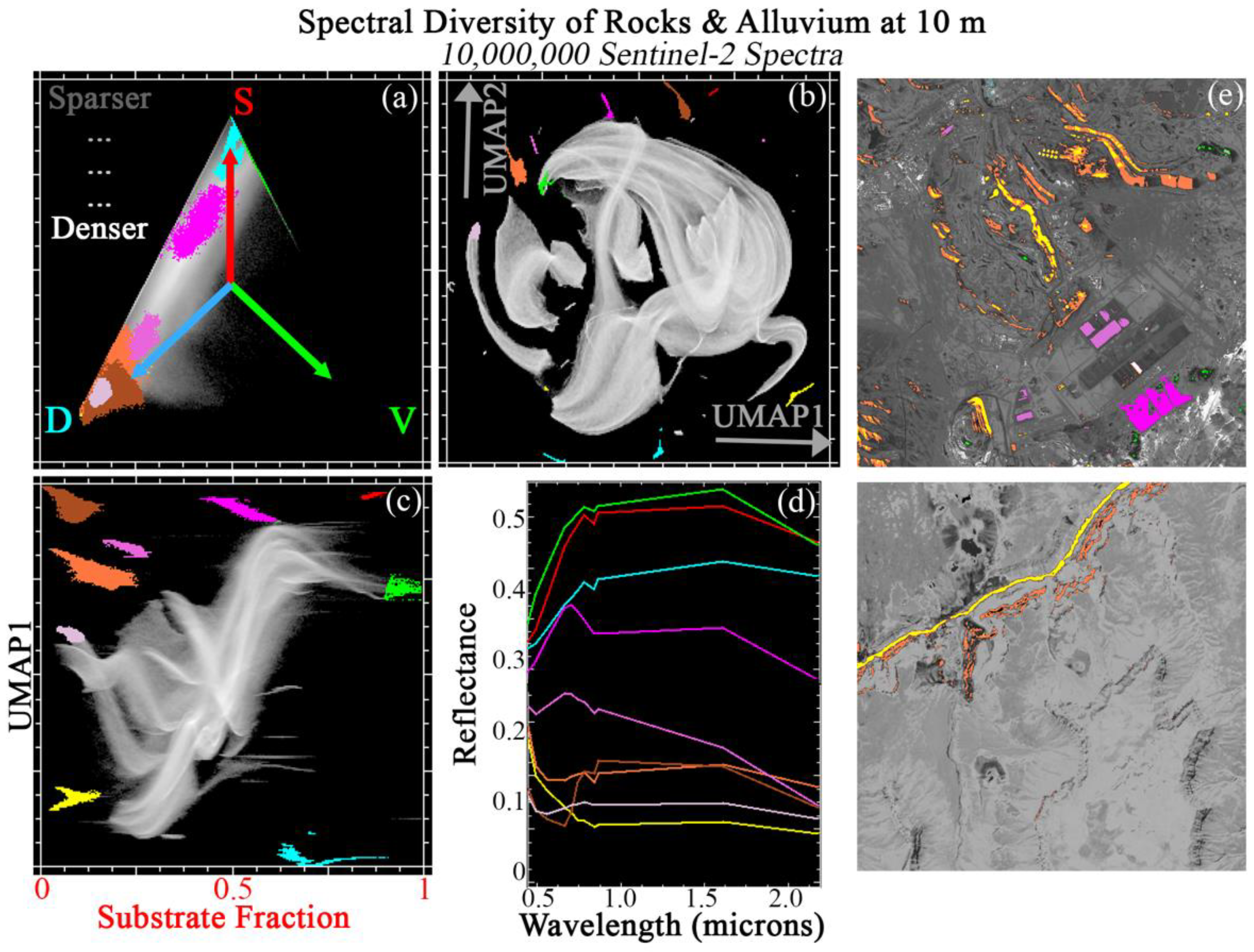
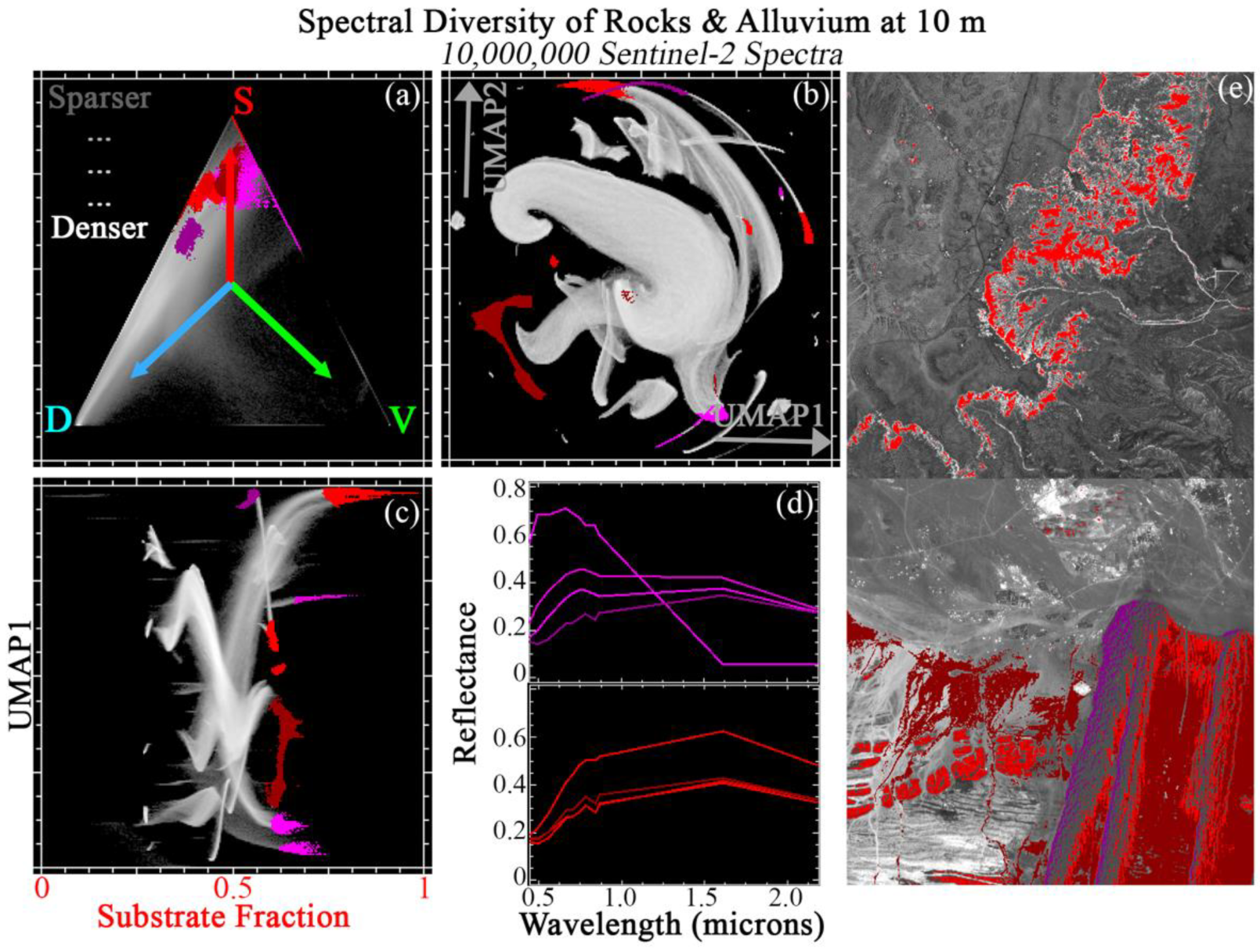
3.9. Rocks and Alluvium
4. Discussion
4.1. Revisiting the Motivating Questions
4.1.1. Question 1: Variance-Based Characterization & Modeling
4.1.2. Question 2: Topology-Based Characterization & Modeling
4.1.3. Question 3: Leveraging Variance & Topology with Joint Characterization
4.2. Why JC Works: A Convergence of Visions
4.2.1. The Geophysical Vision: Projecting Each Pixel Spectrum Independently onto the Global Mixing Space
4.2.2. The Statistical Vision: Learning High-Dimensional Structure within and among Clusters of Similar Pixel Spectra
4.2.3. Fusing These Two Visions: Joint Characterization
4.3. Limitations and Future Work
4.3.1. Limitations
4.3.2. Future Work
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Agriculture | |||
|---|---|---|---|
| TileID | UTM Zone | Easting | Northing |
| S2A_MSIL1C_20170205T210921_N0204_R057_T04QHH | 4N | 868610 | 2223190 |
| S2A_MSIL1C_20170315T101021_N0204_R022_T32TPP | 32N | 623950 | 4864330 |
| S2A_MSIL1C_20170508T012701_N0205_R074_T54STE | 54N | 269220 | 3988590 |
| S2A_MSIL1C_20170723T064631_N0205_R020_T41TKG | 41N | 266210 | 4645260 |
| S2A_MSIL1C_20170917T190351_N0205_R113_T10SFG | 10N | 688930 | 4167330 |
| S2A_OPER_PRD_MSIL1C_PDMC_20161017T044357 | 45N | 723470 | 2625060 |
| S2B_MSIL1C_20170730T040549_N0205_R047_T47SND | 47N | 554190 | 4363690 |
| S2B_MSIL1C_20170918T054629_N0205_R048_T43SDT | 43N | 459570 | 3800040 |
| S2B_MSIL1C_20171008T105009_N0205_R051_T30TYN | 30N | 702100 | 4787760 |
| S2B_MSIL1C_20171013T081959_N0205_R121_T36SYF | 36N | 778000 | 4095680 |
| Sand | |||
| TileID | UTM Zone | Easting | Northing |
| S2A_MSIL1C_20170628T173901_N0205_R098_T13SCS | 13N | 372290 | 3654900 |
| S2A_MSIL1C_20170908T063621_N0205_R120_T40QFK | 40N | 653400 | 2447190 |
| S2A_MSIL1C_20171119T040041_N0206_R004_T48TUK | 48N | 305540 | 4438710 |
| S2A_MSIL1C_20171208T111441_N0206_R137_T29QKD | 29N | 291550 | 2399280 |
| S2A_MSIL1C_20171209T072301_N0206_R006_T38QND | 38N | 527910 | 1890720 |
| S2B_MSIL1C_20171207T105419_N0206_R051_T30RVT | 30N | 481880 | 3290910 |
| S2B_MSIL1C_20171208T084329_N0206_R064_T33JWN | 33S | 541880 | 7265640 |
| S2B_MSIL1C_20171212T100359_N0206_R122_T32RLQ | 32N | 339750 | 2966720 |
| S2B_MSIL1C_20171212T100359_N0206_R122_T32RLR | 32N | 331950 | 3100020 |
| Lava & Ash | |||
| TileID | UTM Zone | Easting | Northing |
| S2A_MSIL1C_20170205T210921_N0204_R057_T04QHH | 4N | 861160 | 2206290 |
| S2A_MSIL1C_20171016T073911_N0205_R092_T36MZC | 36S | 819250 | 9703580 |
| S2A_MSIL1C_20171016T073911_N0205_R092_T36MZC | 36S | 834220 | 9768640 |
| S2A_OPER_PRD_MSIL1C_PDMC_20161014T163303 | 15S | 652170 | 9967520 |
| S2B_MSIL1C_20170723T124309_N0205_R095_T28WDT | 28N | 399960 | 7200220 |
| Urban | |||
| TileID | UTM Zone | Easting | Northing |
| S2A_MSIL1C_20170508T012701_N0205_R074_T54STE | 54N | 269890 | 3950620 |
| S2A_MSIL1C_20170830T131241_N0205_R138_T23KLP | 23S | 328970 | 7398470 |
| S2A_MSIL1C_20170916T055631_N0205_R091_T42RUN | 42N | 300000 | 2758120 |
| S2A_MSIL1C_20171017T103021_N0205_R108_T32TLQ | 32N | 390060 | 4999690 |
| S2B_MSIL1C_20170912T170949_N0205_R112_T14RLP | 14N | 364980 | 2848280 |
| Forest—1 | |||
| TileID | UTM Zone | Easting | Northing |
| S2A_MSIL1C_20170118T081241_N0204_R078_T35MRV | 35S | 831290 | 9963030 |
| S2A_MSIL1C_20170119T074231_N0204_R092_T36JTT | 36S | 284150 | 7247210 |
| S2A_MSIL1C_20170205T210921_N0204_R057_T04QHH | 4N | 847400 | 2230620 |
| S2A_MSIL1C_20170427T021921_N0205_R060_T50HLH | 50S | 355240 | 6230970 |
| S2A_MSIL1C_20170508T012701_N0205_R074_T54STE | 54N | 257880 | 3907290 |
| S2A_MSIL1C_20170604T043701_N0205_R033_T45RYL | 45N | 794940 | 3088140 |
| S2A_MSIL1C_20170705T022551_N0205_R046_T50NMN | 50N | 450950 | 704020 |
| S2A_MSIL1C_20170724T145731_N0205_R039_T18LZL | 18S | 875170 | 8546360 |
| S2A_MSIL1C_20170724T145731_N0205_R039_T19LBF | 19S | 215640 | 8582190 |
| S2A_MSIL1C_20170830T131241_N0205_R138_T23KLP | 23S | 321220 | 7348390 |
| Forest—2 | |||
| TileID | UTM Zone | Easting | Northing |
| S2A_MSIL1C_20170917T190351_N0205_R113_T10SFG | 10N | 607440 | 4106660 |
| S2A_OPER_PRD_MSIL1C_PDMC_20151206T145051 | 20N | 469370 | 431170 |
| S2B_MSIL1C_20170713T023549_N0205_R089_T51RTN | 51N | 231700 | 3257530 |
| S2B_MSIL1C_20170718T101029_N0205_R022_T32TQS | 32N | 773730 | 5121020 |
| S2B_MSIL1C_20170906T002659_N0205_R016_T55KCA | 55S | 353630 | 8006280 |
| S2B_MSIL1C_20170912T084549_N0205_R107_T36TUL | 36N | 335150 | 4512660 |
| S2B_MSIL1C_20171009T003649_N0205_R059_T55MDP | 55S | 469610 | 9317570 |
| S2B_MSIL1C_20171013T081959_N0205_R121_T36SYF | 36N | 791100 | 4092030 |
| S2B_MSIL1C_20171116T132219_N0206_R038_T23KKP | 23S | 215910 | 7344400 |
| S2B_MSIL1C_20171215T152629_N0206_R025_T18NUF | 18N | 381240 | 26200 |
| Senescent Vegetation | |||
| TileID | UTM Zone | Easting | Northing |
| S2A_MSIL1C_20170119T074231_N0204_R092_T36JUT | 36S | 387540 | 7237130 |
| S2A_MSIL1C_20170119T074231_N0204_R092_T36JUT | 36S | 381920 | 7259800 |
| S2A_MSIL1C_20170119T074231_N0204_R092_T36JUT | 36S | 375110 | 7261040 |
| S2A_MSIL1C_20170119T074231_N0204_R092_T36JUT | 36S | 379990 | 7209420 |
| S2A_MSIL1C_20170516T154911_N0205_R054_T18TWQ | 18N | 563770 | 4938390 |
| Tundra & Wetlands | |||
| TileID | UTM Zone | Easting | Northing |
| S2A_MSIL1C_20170718T210021_N0205_R100_T08WNB | 8N | 508380 | 7654750 |
| S2A_MSIL1C_20170718T210021_N0205_R100_T08WNB | 8N | 540940 | 7608620 |
| S2A_OPER_PRD_MSIL1C_PDMC_20160318T145513 | 19S | 495986 | 7997974 |
| S2B_MSIL1C_20170916T215519_N0205_R029_T06WVB | 6N | 442210 | 7700040 |
| S2B_MSIL1C_20170916T215519_N0205_R029_T06WVB | 6N | 458950 | 7676830 |
| Mangroves | |||
| TileID | UTM Zone | Easting | Northing |
| S2A_MSIL1C_20170427T153621_N0205_R068_T18NTP | 18N | 258620 | 824760 |
| S2A_MSIL1C_20170704T013711_N0205_R031_T52MHD | 52S | 814620 | 9839210 |
| S2A_MSIL1C_20170705T022551_N0205_R046_T50NMN | 50N | 498390 | 752360 |
| S2A_MSIL1C_20170705T022551_N0205_R046_T50NMN | 50N | 423780 | 704730 |
| S2A_MSIL1C_20170916T055631_N0205_R091_T42RUN | 42N | 319520 | 2736030 |
| S2A_OPER_PRD_MSIL1C_PDMC_20161018T073751 | 38N | 655730 | 3419140 |
| S2B_MSIL1C_20170826T155519_N0205_R011_T17NMJ | 17N | 472220 | 875270 |
| S2B_MSIL1C_20170919T140039_N0205_R067_T21KVA | 21S | 445610 | 8017250 |
| S2B_MSIL1C_20171123T043059_N0206_R133_T45QYE | 45N | 756960 | 2481220 |
| S2B_MSIL1C_20171123T043059_N0206_R133_T45QYE | 45N | 763390 | 2429410 |
| Rock & Alluvium—1 | |||
| TileID | UTM Zone | Easting | Northing |
| S2A_MSIL1C_20160723T143750_T19KER | 19S | 506000 | 7534310 |
| S2A_MSIL1C_20170124T051101_N0204_R019_T44RQV | 44N | 781870 | 3417600 |
| S2A_MSIL1C_20170412T074611_N0204_R135_T37PDQ | 37N | 467190 | 1496550 |
| S2A_MSIL1C_20170412T074611_N0204_R135_T37PDQ | 37N | 415880 | 1480390 |
| S2A_MSIL1C_20170613T182921_N0205_R027_T11SMB | 11N | 478340 | 4162580 |
| S2A_MSIL1C_20170613T182921_N0205_R027_T11SMB | 11N | 441920 | 4110190 |
| S2A_MSIL1C_20170613T182921_N0205_R027_T11SMB | 11N | 424630 | 4194020 |
| S2A_MSIL1C_20170613T182921_N0205_R027_T11SMB | 11N | 429810 | 4180830 |
| S2A_MSIL1C_20170627T180911_N0205_R084_T12SUF | 12N | 310360 | 4011400 |
| S2A_MSIL1C_20170627T180911_N0205_R084_T12SUF | 12N | 304930 | 4096250 |
| Rock & Alluvium—2 | |||
| TileID | UTM Zone | Easting | Northing |
| S2A_MSIL1C_20170627T180911_N0205_R084_T12SUG | 12N | 393280 | 4169500 |
| S2A_MSIL1C_20170908T063621_N0205_R120_T40QFK | 40N | 664760 | 2494790 |
| S2A_MSIL1C_20171201T150711_N0206_R039_T18LZH | 18S | 866060 | 8213050 |
| S2A_MSIL1C_20171207T082321_N0206_R121_T34HCH | 34S | 395100 | 6286480 |
| S2A_OPER_PRD_MSIL1C_PDMC_20151022T184002 | 11N | 516790 | 4027140 |
| S2A_OPER_PRD_MSIL1C_PDMC_20160318T145513 | 19S | 486817 | 8008443 |
| S2B_MSIL1C_20171103T061009_N0206_R134_T42SWC | 42N | 576560 | 3774420 |
| S2B_MSIL1C_20171103T061009_N0206_R134_T42SWD | 42N | 544220 | 3856340 |
| S2B_MSIL1C_20171202T064229_N0206_R120_T40RGU | 40N | 768340 | 3304040 |
| S2B_MSIL1C_20171212T064249_N0206_R120_T40QEL | 40N | 520620 | 2570980 |
References
- Landgrebe, D.; Hoffer, R.; Goodrick, F. An Early Analysis of ERTS-1 Data. 1972. Available online: http://docs.lib.purdue.edu/larstech/106 (accessed on 1 October 2022).
- Straub, C.L.; Koontz, S.R.; Loomis, J.B. Economic Valuation of Landsat Imagery. In Open-File Report; U.S. Geological Survey: Reston, VA, USA, 2019; p. 13. [Google Scholar] [CrossRef]
- Zhu, Z.; Wulder, M.A.; Roy, D.P.; Woodcock, C.E.; Hansen, M.C.; Radeloff, V.C.; Healey, S.P.; Schaaf, C.; Hostert, P.; Strobl, P. Benefits of the Free and Open Landsat Data Policy. Remote Sens. Environ. 2019, 224, 382–385. [Google Scholar] [CrossRef]
- Landgrebe, D. Machine Processing for Remotely Acquired Data. In LARS Technical Reports; Purdue University Press: West Lafayette, IN, USA, 1973; p. 29. Available online: http://docs.lib.purdue.edu/larstech/29 (accessed on 1 October 2022).
- Price, J.C. Spectral Band Selection for Visible-near Infrared Remote Sensing: Spectral-Spatial Resolution Tradeoffs. IEEE Trans. Geosci. Remote Sens. 1997, 35, 1277–1285. [Google Scholar] [CrossRef]
- Wulder, M.A.; Roy, D.P.; Radeloff, V.C.; Loveland, T.R.; Anderson, M.C.; Johnson, D.M.; Healey, S.; Zhu, Z.; Scambos, T.A.; Pahlevan, N. Fifty Years of Landsat Science and Impacts. Remote Sens. Environ. 2022, 280, 113195. [Google Scholar] [CrossRef]
- Drusch, M.; Del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P. Sentinel-2: ESA’s Optical High-Resolution Mission for GMES Operational Services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- Camps-Valls, G. Machine Learning in Remote Sensing Data Processing; IEEE: New York, NY, USA, 2009; pp. 1–6. [Google Scholar]
- Lary, D.J.; Alavi, A.H.; Gandomi, A.H.; Walker, A.L. Machine Learning in Geosciences and Remote Sensing. Geosci. Front. 2016, 7, 3–10. [Google Scholar] [CrossRef] [Green Version]
- Maxwell, A.E.; Warner, T.A.; Fang, F. Implementation of Machine-Learning Classification in Remote Sensing: An Applied Review. Int. J. Remote Sens. 2018, 39, 2784–2817. [Google Scholar] [CrossRef] [Green Version]
- Thompson, D.; Brodrick, P. Making Machine Learning Work for Geoscience: Imaging Spectroscopy as a Case Example. EOS 2021. [Google Scholar] [CrossRef]
- Roscher, R.; Bohn, B.; Duarte, M.; Garcke, J. Explain It to Me—Facing Remote Sensing Challenges in the Bio-and Geosciences With Explainable Machine Learning. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 3, 817–824. [Google Scholar] [CrossRef]
- Small, C. Grand Challenges in Remote Sensing Image Analysis and Classification. Front. Remote Sens. 2021, 2, 619818. [Google Scholar] [CrossRef]
- Cayton, L. Algorithms for Manifold Learning. Univ. Calif. San Diego Tech. Rep. 2005, 12, 1–17. [Google Scholar]
- Izenman, A.J. Introduction to Manifold Learning. WIREs Comput. Stat. 2012, 4, 439–446. [Google Scholar] [CrossRef]
- Van Der Maaten, L.; Postma, E.; Van den Herik, J. Dimensionality Reduction: A Comparative Review. J. Mach. Learn Res. 2009, 10, 13. [Google Scholar]
- Pearson, K. LIII. On Lines and Planes of Closest Fit to Systems of Points in Space. Null 1901, 2, 559–572. [Google Scholar] [CrossRef] [Green Version]
- Small, C. Spatiotemporal Dimensionality and Time-Space Characterization of Multitemporal Imagery. Remote Sens. Environ. 2012, 124, 793–809. [Google Scholar] [CrossRef] [Green Version]
- Woodcock, C.E.; Strahler, A.H. The Factor of Scale in Remote Sensing. Remote Sens. Environ. 1987, 21, 311–332. [Google Scholar] [CrossRef]
- Adams, J.B.; Smith, M.O.; Johnson, P.E. Spectral Mixture Modeling: A New Analysis of Rock and Soil Types at the Viking Lander 1 Site. J. Geophys. Res. Solid Earth 1986, 91, 8098–8112. [Google Scholar] [CrossRef]
- Gillespie, A. Interpretation of Residual Images: Spectral Mixture Analysis of AVIRIS Images, Owens Valley, California. In Second Airborne Visible/Infrared Imaging Spectrometer (AVIRIS) Workshop; NASA: Pasadena, CA, USA, 1990; pp. 243–270. [Google Scholar]
- Smith, M.O.; Ustin, S.L.; Adams, J.B.; Gillespie, A.R. Vegetation in Deserts: I. A Regional Measure of Abundance from Multispectral Images. Remote Sens. Environ. 1990, 31, 1–26. [Google Scholar] [CrossRef]
- Niv, I.; Bregman, Y.; Rabin, N. Identification of Mine Explosions Using Manifold Learning Techniques. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–13. [Google Scholar] [CrossRef]
- Li, H.; Cui, J.; Zhang, X.; Han, Y.; Cao, L. Dimensionality Reduction and Classification of Hyperspectral Remote Sensing Image Feature Extraction. Remote Sens. 2022, 14, 4579. [Google Scholar] [CrossRef]
- Sobien, D.; Higgins, E.; Krometis, J.; Kauffman, J.; Freeman, L. Improving Deep Learning for Maritime Remote Sensing through Data Augmentation and Latent Space. Mach. Learn. Knowl. Extr. 2022, 4, 31. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, J.; Tan, C.; Zhan, J.; Song, S.; Xu, W.; Yan, J.; Zhang, Y.; Zhao, M.; Wang, Q. Intelligent Scanning for Optimal Rock Discontinuity Sets Considering Multiple Parameters Based on Manifold Learning Combined with UAV Photogrammetry. Eng. Geol. 2022, 309, 106851. [Google Scholar] [CrossRef]
- Sousa, F.J.; Sousa, D.J. Hyperspectral Reconnaissance: Joint Characterization of the Spectral Mixture Residual Delineates Geologic Unit Boundaries in the White Mountains, CA. Remote Sens. 2022, 14, 4914. [Google Scholar] [CrossRef]
- Sousa, D.; Small, C. Joint Characterization of Multiscale Information in High Dimensional Data. Adv. Artif. Intell. Mach. Learn. 2021, 1, 196–212. [Google Scholar] [CrossRef]
- Small, C.; Sousa, D. Joint Characterization of the Cryospheric Spectral Feature Space. Front. Remote Sens. 2021, 2. [Google Scholar] [CrossRef]
- Sousa, D.; Small, C. Joint Characterization of Spatiotemporal Data Manifolds. Front. Remote Sens. 2022, 3, 760650. [Google Scholar] [CrossRef]
- Small, C.; Sousa, D. The Climatic Temporal Feature Space: Continuous and Discrete. Adv. Artif. Intell. Mach. Learn. 2021, 1, 165–183. [Google Scholar] [CrossRef]
- Small, C.; Sousa, D. The Sentinel 2 MSI Spectral Mixing Space. Remote Sens. 2022. [Google Scholar]
- McInnes, L.; Healy, J.; Melville, J. Umap: Uniform Manifold Approximation and Projection for Dimension Reduction. arXiv 2018, arXiv:1802.03426. [Google Scholar]
- Mitchell, T.D.; Jones, P.D. An Improved Method of Constructing a Database of Monthly Climate Observations and Associated High-resolution Grids. Int. J. Climatol. J. R. Meteorol. Soc. 2005, 25, 693–712. [Google Scholar] [CrossRef]
- Houghton, E. Climate Change 1995: The Science of Climate Change: Contribution of Working Group I to the Second Assessment Report of the Intergovernmental Panel on Climate Change; Cambridge University Press: Cambridge, UK, 1996; Volume 2, ISBN 0-521-56436-0. [Google Scholar]
- Small, C. The Landsat ETM+ Spectral Mixing Space. Remote Sens. Environ. 2004, 93, 1–17. [Google Scholar] [CrossRef]
- Small, C.; Milesi, C. Multi-Scale Standardized Spectral Mixture Models. Remote Sens. Environ. 2013, 136, 442–454. [Google Scholar] [CrossRef] [Green Version]
- Sousa, D.; Small, C. Global Cross-Calibration of Landsat Spectral Mixture Models. Remote Sens. Environ. 2017, 192, 139–149. [Google Scholar] [CrossRef] [Green Version]
- Sousa, D.; Small, C. Globally Standardized MODIS Spectral Mixture Models. Remote Sens. Lett. 2019, 10, 1018–1027. [Google Scholar] [CrossRef]
- Sousa, D.; Small, C. Multisensor Analysis of Spectral Dimensionality and Soil Diversity in the Great Central Valley of California. Sensors 2018, 18, 583. [Google Scholar] [CrossRef] [Green Version]
- Sousa, D.; Brodrick, P.G.; Cawse-Nicholson, K.; Fisher, J.B.; Pavlick, R.; Small, C.; Thompson, D.R. The Spectral Mixture Residual: A Source of Low-Variance Information to Enhance the Explainability and Accuracy of Surface Biology and Geology Retrievals. J. Geophys. Res. Biogeosci. 2022, 127, e2021JG006672. [Google Scholar] [CrossRef]
- Settle, J.J.; Drake, N.A. Linear Mixing and the Estimation of Ground Cover Proportions. Int. J. Remote Sens. 1993, 14, 1159–1177. [Google Scholar] [CrossRef]
- Kauth, R.J.; Thomas, G.S. The Tasselled Cap—A Graphic Description of the Spectral-Temporal Development of Agricultural Crops as Seen by LANDSAT. The Laboratory for Applications of Remote Sensing. In Proceedings of the Symposium on Machine Processing of Remotely Sensed Data, West Lafayette, IN, USA, 29 July 1976; Purdue University: West Lafayette, IN, USA, 1976; Volume 159, pp. 41–51. [Google Scholar]
- Crist, E.P.; Cicone, R.C. A Physically-Based Transformation of Thematic Mapper Data—The TM Tasseled Cap. IEEE Trans. Geosci. Remote Sens. 1984, GE-22, 256–263. [Google Scholar] [CrossRef]
- McInnes, L. UMAP: Uniform Manifold Approximation and Projection for Dimension Reduction—Umap 0.5 Documentation. Available online: https://umap-learn.readthedocs.io/en/latest/ (accessed on 13 October 2022).
- Boardman, J.W. Automating Spectral Unmixing of AVIRIS Data Using Convex Geometry Concepts; US Gov. Public Use Permitted: Washington, DC, USA, 1993; Volume 1, pp. 11–14. [Google Scholar]
- Boardman, J.W. Leveraging the High Dimensionality of AVIRIS Data for Improved Sub-Pixel Target Unmixing and Rejection of False Positives: Mixture Tuned Matched Filtering; NASA Jet Propulsion Laboratory: Pasadena, CA, USA, 1998; Volume 97, pp. 55–56. [Google Scholar]
- Parker, R. Geophysical Inverse Theory; Princeton University Press: Princeton, NJ, USA, 1994; ISBN 978-0-691-03634-2. [Google Scholar]
- Tarantola, A. Inverse Problem Theory and Methods for Model Parameter Estimation; SIAM: Philadelphia, PA, USA, 2005; ISBN 0-89871-572-5. [Google Scholar]
- Menke, W. Geophysical Data Analysis: Discrete Inverse Theory, 4th ed.; Academic Press: Cambridge, MA, USA, 2018; ISBN 978-0-12-813556-3. [Google Scholar]
- Bachmann, C.M.; Ainsworth, T.L.; Fusina, R.A. Exploiting Manifold Geometry in Hyperspectral Imagery. IEEE Trans. Geosci. Remote Sens. 2005, 43, 441–454. [Google Scholar] [CrossRef]
- Gillis, D.; Bowles, J.; Lamela, G.M.; Rhea, W.J.; Bachmann, C.M.; Montes, M.; Ainsworth, T. Manifold Learning Techniques for the Analysis of Hyperspectral Ocean Data; International Society for Optics and Photonics: Washington, DC, USA, 2005; Volume 5806, pp. 342–351. [Google Scholar]
- Van der Maaten, L.; Hinton, G. Visualizing Data Using T-SNE. J. Mach. Learn. Res. 2008, 9, 2579–2605. [Google Scholar]
- Belkin, M.; Niyogi, P. Laplacian Eigenmaps for Dimensionality Reduction and Data Representation. Neural Comput. 2003, 15, 1373–1396. [Google Scholar] [CrossRef] [Green Version]
- Kobak, D.; Linderman, G.C. Initialization Is Critical for Preserving Global Data Structure in Both T-SNE and UMAP. Nat. Biotechnol. 2021, 39, 156–157. [Google Scholar] [CrossRef] [PubMed]
- Xiang, R.; Wang, W.; Yang, L.; Wang, S.; Xu, C.; Chen, X. A Comparison for Dimensionality Reduction Methods of Single-Cell RNA-Seq Data. Front. Genet. 2021, 12, 646936. [Google Scholar] [CrossRef] [PubMed]
- Hozumi, Y.; Wang, R.; Yin, C.; Wei, G.-W. UMAP-Assisted K-Means Clustering of Large-Scale SARS-CoV-2 Mutation Datasets. Comput. Biol. Med. 2021, 131, 104264. [Google Scholar] [CrossRef] [PubMed]
- Jiale, Y.; Ying, Z. Visualization Method of Sound Effect Retrieval Based on UMAP. In Proceedings of the 2020 IEEE 4th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chongqing, China, 12–14 June 2020; Volume 1, pp. 2216–2220. [Google Scholar]
- Small, C. Multiresolution Analysis of Urban Reflectance; IEEE: New York, NY, USA, 2001; pp. 15–19. [Google Scholar]
- Green, R.O.; Mahowald, N.; Ung, C.; Thompson, D.R.; Bator, L.; Bennet, M.; Bernas, M.; Blackway, N.; Bradley, C.; Cha, J.; et al. The Earth Surface Mineral Dust Source Investigation: An Earth Science Imaging Spectroscopy Mission. In Proceedings of the 2020 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2020; pp. 1–15. [Google Scholar]
- Krutz, D.; Müller, R.; Knodt, U.; Günther, B.; Walter, I.; Sebastian, I.; Säuberlich, T.; Reulke, R.; Carmona, E.; Eckardt, A.; et al. The Instrument Design of the DLR Earth Sensing Imaging Spectrometer (DESIS). Sensors 2019, 19, 1622. [Google Scholar] [CrossRef] [PubMed]
- Candela, L.; Formaro, R.; Guarini, R.; Loizzo, R.; Longo, F.; Varacalli, G. The PRISMA Mission. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 253–256. [Google Scholar]
- Nieke, J.; Rast, M. Towards the Copernicus Hyperspectral Imaging Mission for the Environment (CHIME); IEEE: New York, NY, USA, 2018; pp. 157–159. [Google Scholar]
- Iwasaki, A.; Ohgi, N.; Tanii, J.; Kawashima, T.; Inada, H. Hyperspectral Imager Suite (HISUI)—Japanese Hyper-Multi Spectral Radiometer; IEEE: New York, NY, USA, 2011; pp. 1025–1028. [Google Scholar]
- Thompson, D.R.; Schimel, D.S.; Poulter, B.; Brosnan, I.; Hook, S.J.; Green, R.O.; Glenn, N.; Guild, L.; Henn, C.; Cawse-Nicholson, K. NASA’s Surface Biology and Geology Concept Study: Status and Next Steps; IEEE: New York, NY, USA, 2021; pp. 3269–3271. [Google Scholar]
- Asner, G.P.; Knapp, D.E.; Boardman, J.; Green, R.O.; Kennedy-Bowdoin, T.; Eastwood, M.; Martin, R.E.; Anderson, C.; Field, C.B. Carnegie Airborne Observatory-2: Increasing Science Data Dimensionality via High-Fidelity Multi-Sensor Fusion. Remote Sens. Environ. 2012, 124, 454–465. [Google Scholar] [CrossRef]
- Boardman, J.W.; Green, R.O. Exploring the Spectral Variability of the Earth as Measured by AVIRIS in 1999. In Proceedings of the Summaries of the 8th Annual JPL Airborne Geoscience Workshop, Pasadena, CA, USA, 1 December 2000; NASA: Pasadena, CA, USA, 2000; Volume 1, pp. 1–12. [Google Scholar]
- Cawse-Nicholson, K.; Hook, S.J.; Miller, C.E.; Thompson, D.R. Intrinsic Dimensionality in Combined Visible to Thermal Infrared Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 4977–4984. [Google Scholar] [CrossRef]
- Cawse-Nicholson, K.; Damelin, S.B.; Robin, A.; Sears, M. Determining the Intrinsic Dimension of a Hyperspectral Image Using Random Matrix Theory. IEEE Trans. Image Process. 2013, 22, 1301–1310. [Google Scholar] [CrossRef]
- Thompson, D.R.; Boardman, J.W.; Eastwood, M.L.; Green, R.O. A Large Airborne Survey of Earth’s Visible-Infrared Spectral Dimensionality. Opt. Express 2017, 25, 9186–9195. [Google Scholar] [CrossRef] [Green Version]
- Tenenbaum, J.B.; Silva, V.D.; Langford, J.C. A Global Geometric Framework for Nonlinear Dimensionality Reduction. Science 2000, 290, 2319. [Google Scholar] [CrossRef]
- Kruskal, J.B. Multidimensional Scaling by Optimizing Goodness of Fit to a Nonmetric Hypothesis. Psychometrika 1964, 29, 1–27. [Google Scholar] [CrossRef]
- Kruskal, J.B. Nonmetric Multidimensional Scaling: A Numerical Method. Psychometrika 1964, 29, 115–129. [Google Scholar] [CrossRef]
















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sousa, D.; Small, C. Joint Characterization of Sentinel-2 Reflectance: Insights from Manifold Learning. Remote Sens. 2022, 14, 5688. https://doi.org/10.3390/rs14225688
Sousa D, Small C. Joint Characterization of Sentinel-2 Reflectance: Insights from Manifold Learning. Remote Sensing. 2022; 14(22):5688. https://doi.org/10.3390/rs14225688
Chicago/Turabian StyleSousa, Daniel, and Christopher Small. 2022. "Joint Characterization of Sentinel-2 Reflectance: Insights from Manifold Learning" Remote Sensing 14, no. 22: 5688. https://doi.org/10.3390/rs14225688