
Processing and Validation of the STAR COSMIC-2 Temperature and Water Vapor Profiles in the Neutral Atmosphere

Abstract
:1. Introduction
- (i).
- RO data processing and re-processing (for Level 1a (L1a) to Level 1b (L1b)and L1b to Level 2 (L2) processing and re-processing). We generated independently developed RO products for multiple RO missions. STAR has developed the stand-alone RO inversion package for converting COSMIC-2 Level 1a (phase delay) to Level 1b (excess phase) processing [32] and for converting Level 1b to Level 2 (bending angle and refractivity profiles) processing [33]. The STAR processed data can be used to understand the RO excess phase data quality and quantify the derived bending angle profiles’ structural uncertainty when other RO processing centers implement different inversion methods and initialization approaches [29,30,31]. We also compared the STAR results with those produced by other RO centers (i.e., UCAR, Radio Occultation Meteorology Satellite Application Facility (ROM SAF), etc. [29,30,31]). We also use all available STAR RO data products to generate the monthly mean climatologies (MMCs) for climate studies.
- (ii).
- The integrated calibration and validation (Cal/Val) system (ICVS) for data monitoring and climate comparisons. To routinely monitor the quality of multiple RO missions and identify the sudden quality change in the time series of RO data products, we developed the GNSS RO ICVS, see https://ncc.nesdis.noaa.gov/GNSSRO/ICVS/index.php (accessed on 26 September 2022). Using the system, we also compare climate data generated from multiple RO missions and reanalysis.
- (iii).
- Multi-sensor calibration and validation system. The main goal of the STAR multi-sensor validation system is to evaluate data from various RO missions relative to IR/MW observations collected from multiple satellite missions through direct comparison or through converting RO data to IR/MW brightness temperatures (BTs) using radiative-transfer models (see Section 5). STAR is also a national satellite center where experts in satellite instruments for IR and MW sounders and in situ measurements (radiosonde) are under one roof. All MW and IR sounders from multiple satellite missions, including the NOAA-15, 18, 19, Suomi National Polar-orbiting Partnership (SNPP), NOAA-20 (N20), and the meteorological operational satellite (Metop) -A, -B, and -C are monitored by STAR’s ICVS (see https://www.star.nesdis.noaa.gov/icvs/ (accessed on 26 September 2022)).
- (iv).
- Demonstration of the RO impacts on NWP through data assimilation. We also assimilated COSMIC-2 data into NOAA’s hurricane weather research and forecasting (HWRF) model through cycled forecasting experiments [34]. We are also interacting with NOAA’s environmental modeling center (EMC) to provide the best error characteristics for RO data to improve the quality control criteria in NOAA’s NWP system.
2. Data
2.1. COSMIC-2 Data and UCAR COSMIC-2 WetPrf and WetPrf2 Data Products
2.2. Radiosonde, CrIS, ATMS, and Reanalysis Data
3. STAR Temperature and Water Vapor Profile Inversion Implementation
3.1. STAR 1D-Var Approaches
3.2. Pre-Defining the Background Covariance Matrix and Error Covariance Matrix
3.3. The Averaging Kernels for COSMIC-2 Temperature and Water Vapor
4. Validation of the STAR COSMIC-2 Temperature and Water Vapor Profiles
4.1. Global Temperature and Water Vapor Comparisons with RS41 and RS92
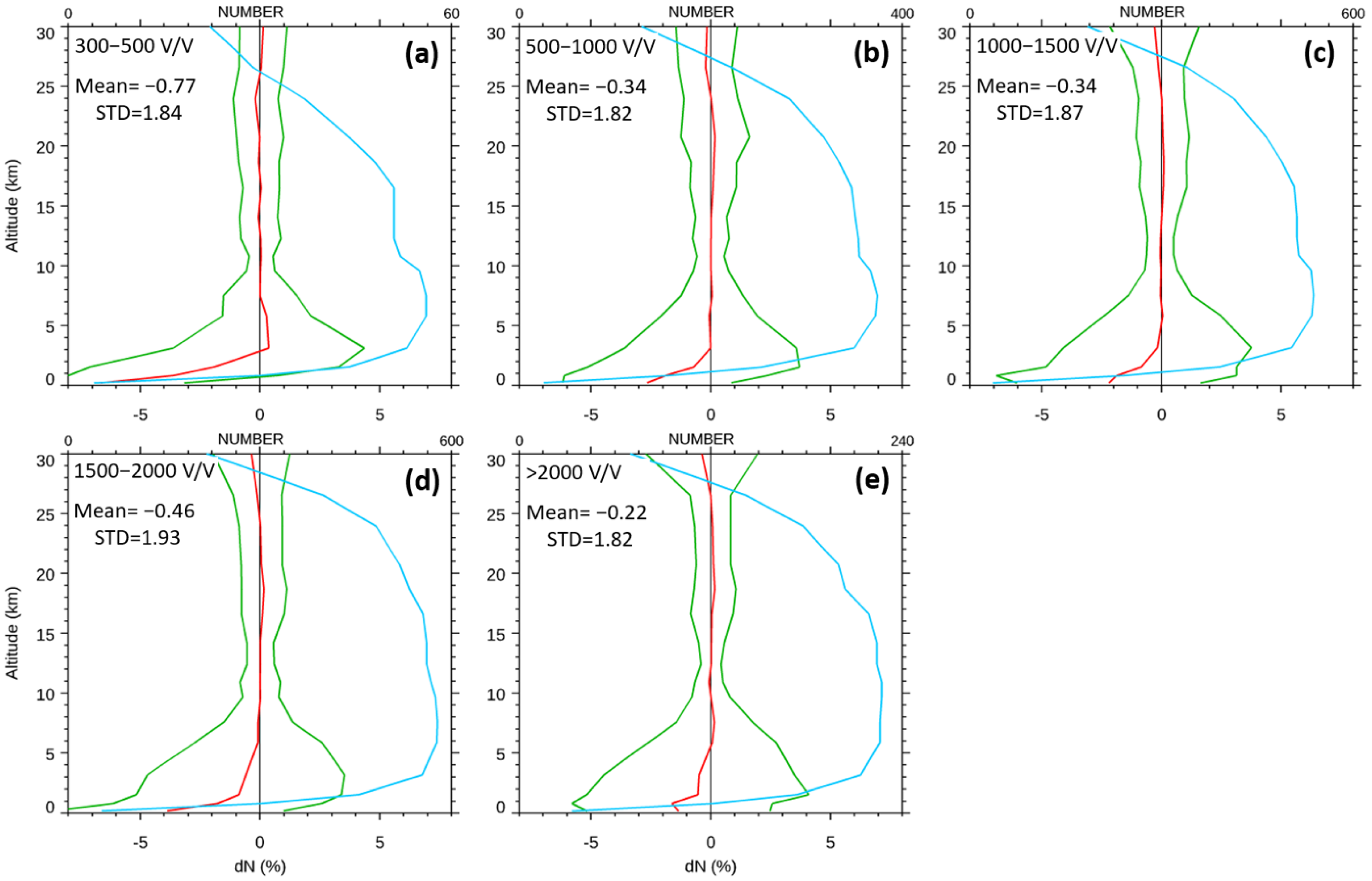
4.2. Water Vapor and Refractivity Comparisons with Different SNR Groups
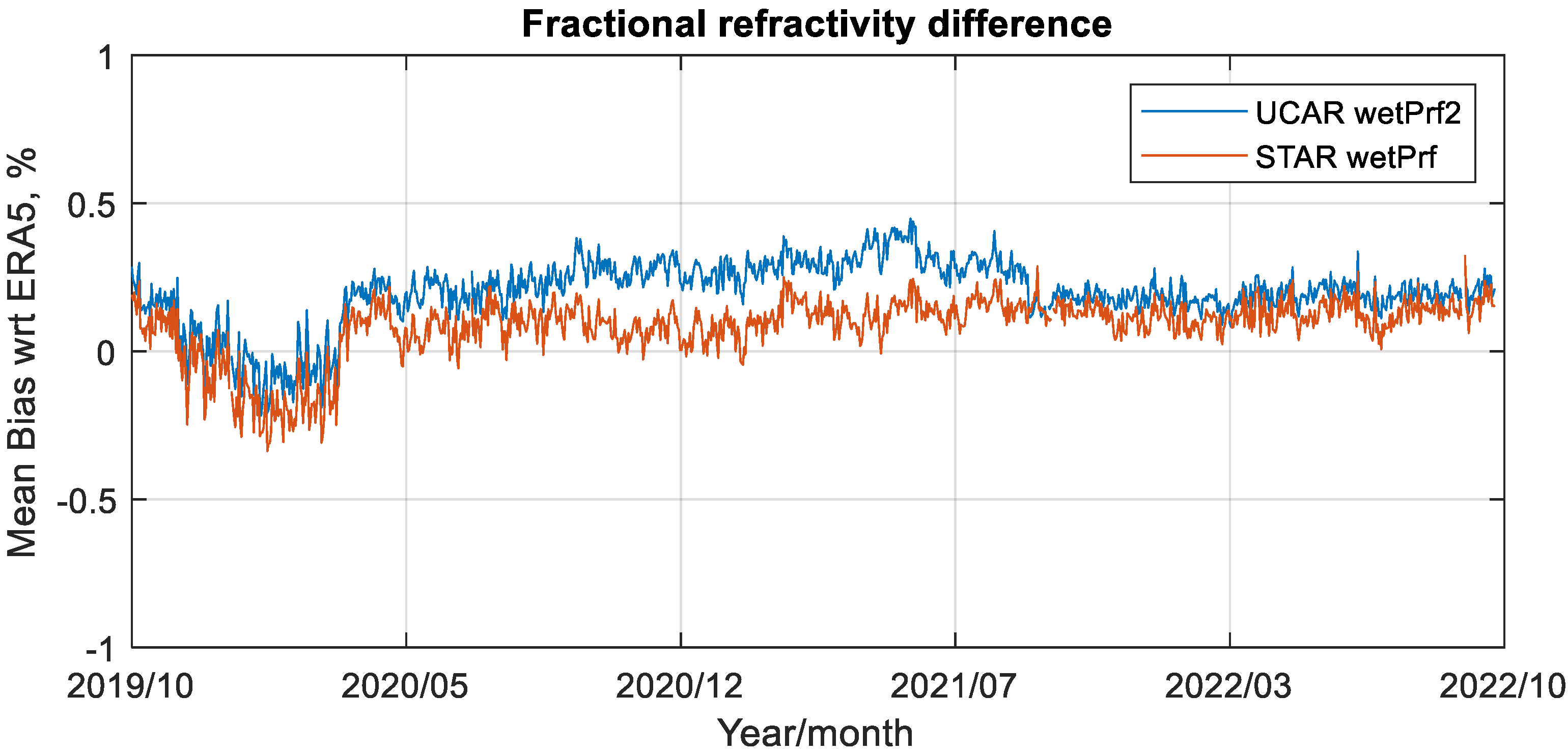
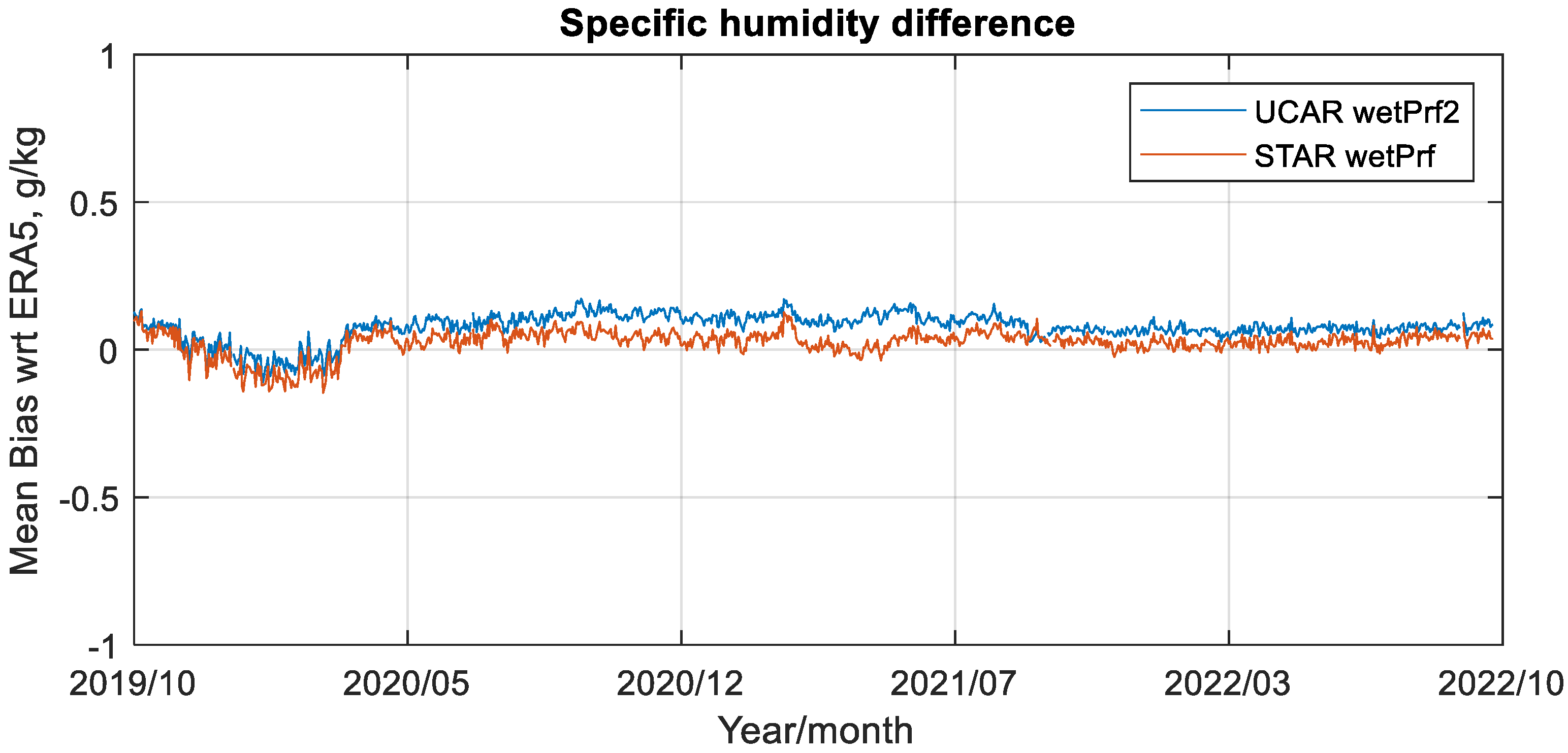
4.3. Comparisons with UCAR COSMIC-2 WetPrf2 Retrievals
4.4. Using STAR COSMIC-2 1D-Var Results for Climate Monitoring
5. Evaluation of STAR COSMIC-2 Wet Profile Retrievals through Comparison with CrIS and ATMS
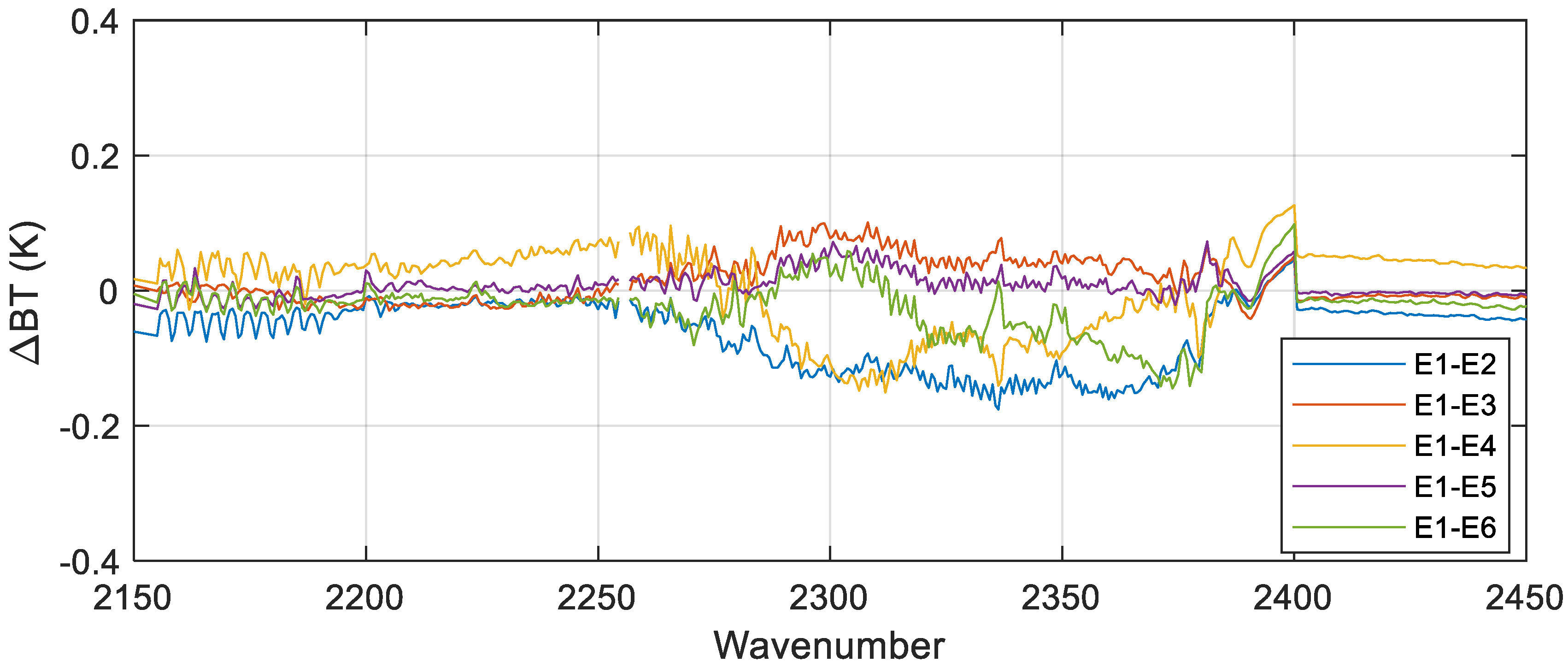
5.1. Comparisons with CrIS Measurements Using CRTM and Double-Difference Method
5.1.1. Validation Approaches
5.1.2. Comparison Results
5.2. Comparison of STAR COSMIC-2 WetPrf with SNPP ATMS Measurements Using CRTM
5.2.1. Validation Approaches
5.2.2. Comparison Results
6. Conclusions
- (i).
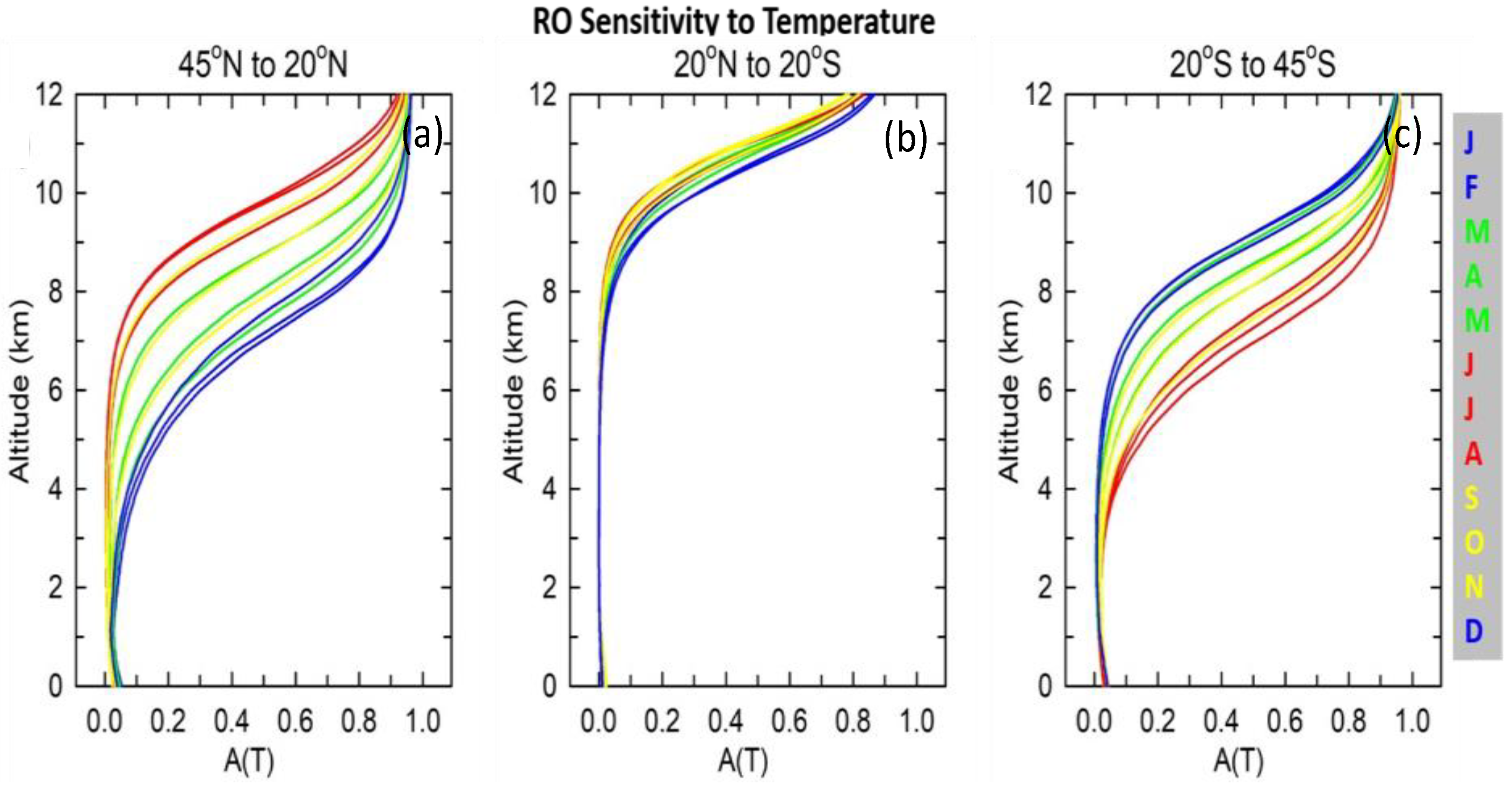
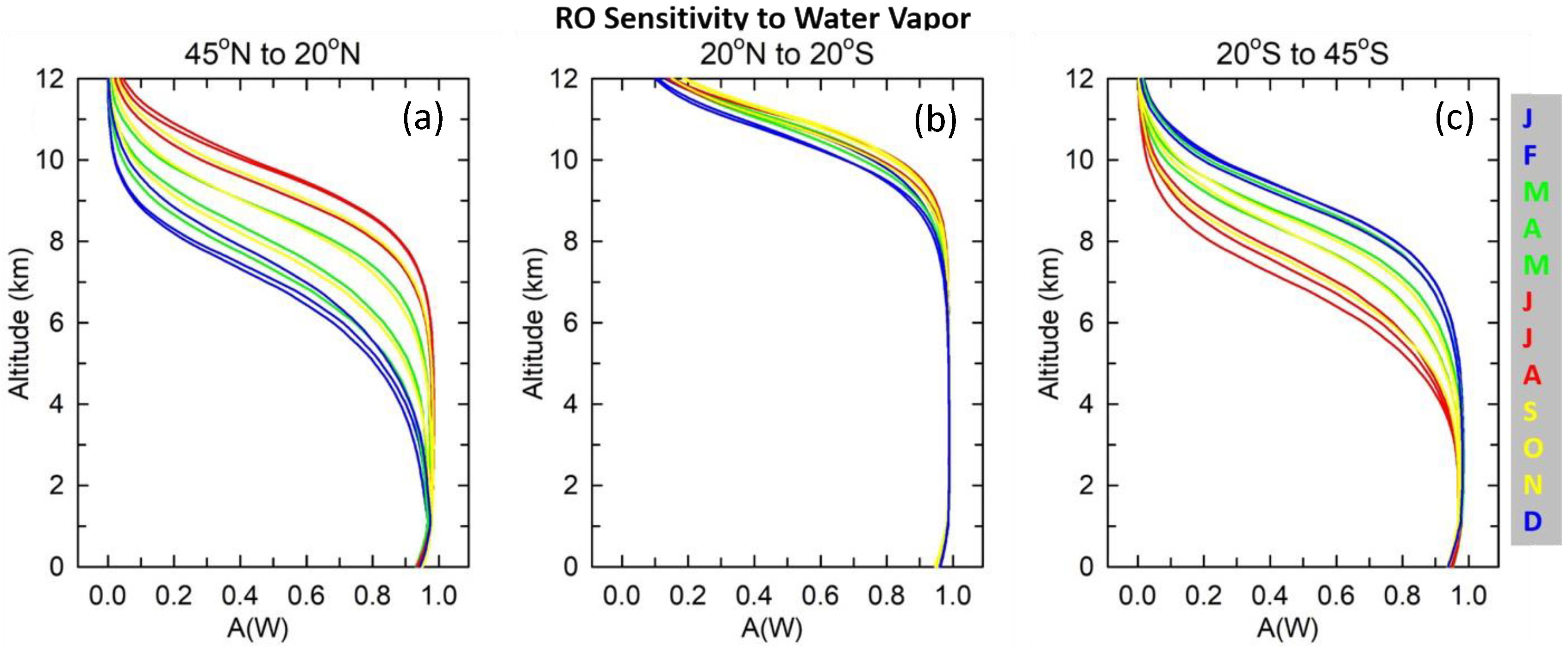
- COSMIC-2 (and other RO) refractivity is sensitive to temperature and water vapor. Like all RO data, COSMIC-2 refractivity is sensitive to temperature variation in the upper and lower stratosphere, where water vapor amounts are negligible. In the troposphere, RO refractivity is very sensitive to water vapor variation, which is reflected in the magnitude of COSMIC-2 water vapor averaging kernels. COSMIC-2 water vapor averaging kernels are more significant in the lower troposphere in the summer than in winter during drier seasons. In the tropical region within 20°N to 20°S, the magnitude of COSMIC-2 water vapor averaging kernels is very close to 1.0 from the surface to 8 km altitude. As a result, in the 1D-Var package, most of the COSMIC-2 refractivity in the upper and lower stratosphere is used for temperature retrievals. In the moisture troposphere, most of the COSMIC-2 refractivity information is used for moisture retrievals.
- (ii).
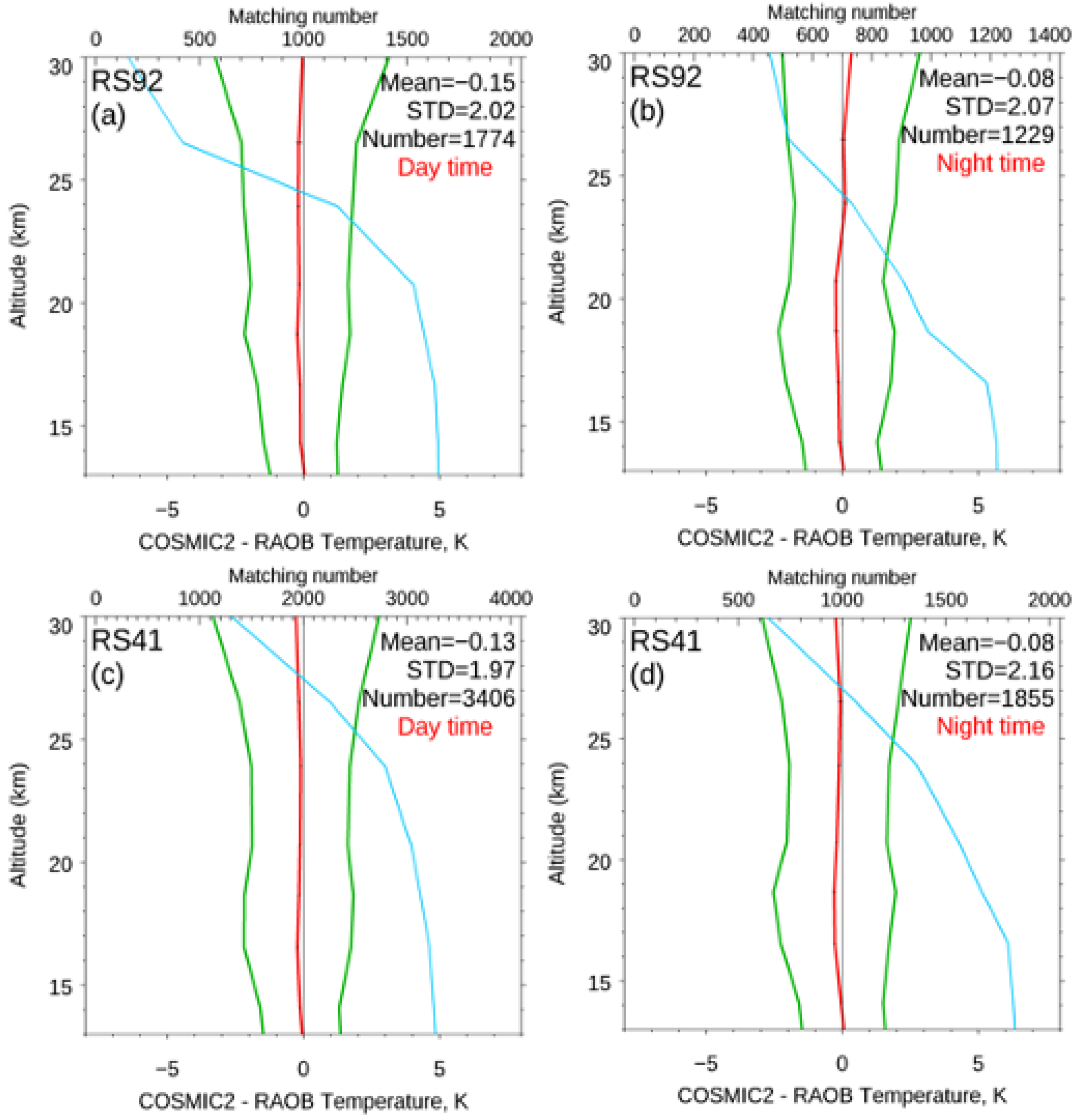
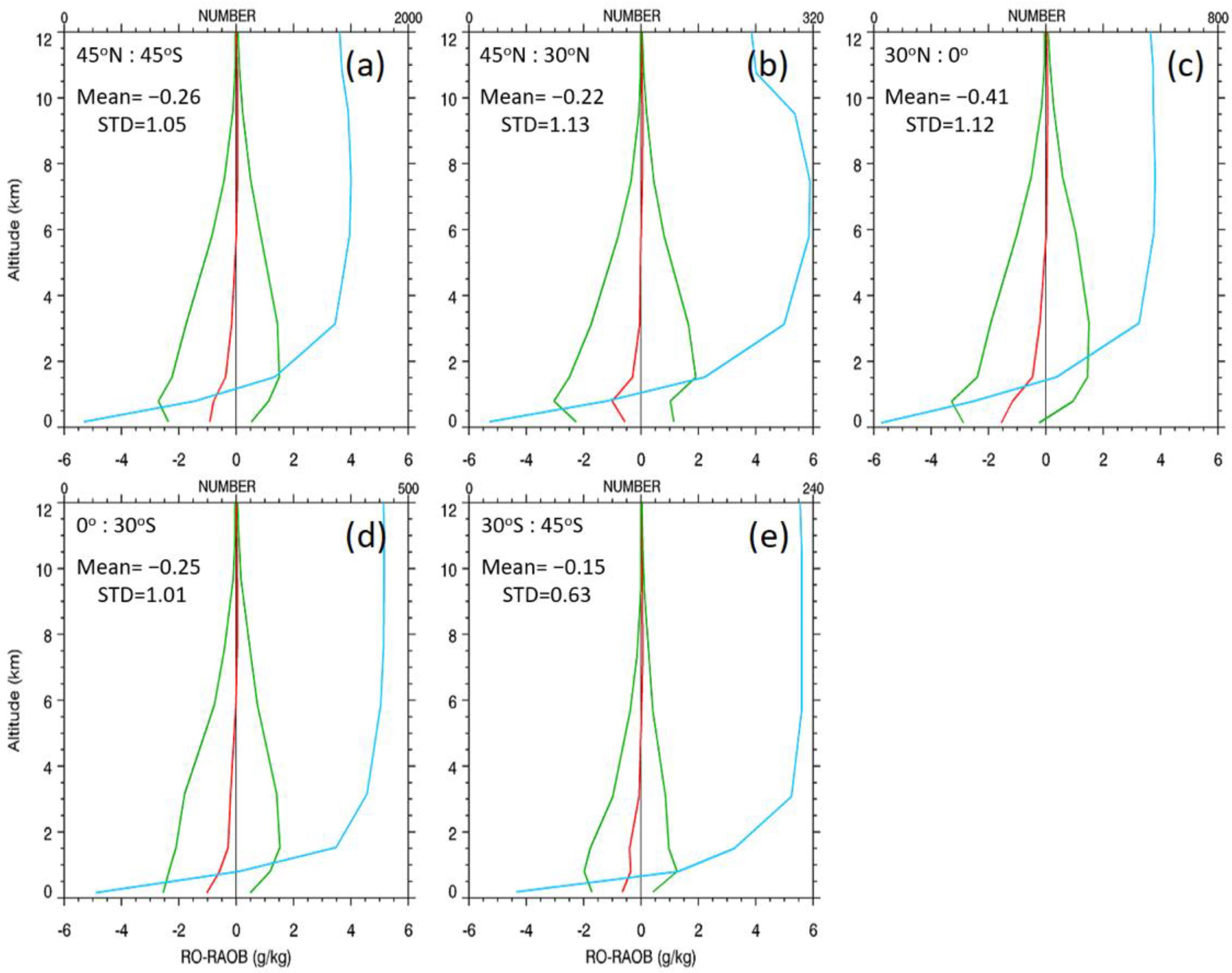
- Validation Results. In this study, we used RS41 and ERA5, and UCAR 1D-Var products (wetPrf2) to validate the accuracy and uncertainty of the STAR 1D-Var thermal profiles. Researchers [15] have verified the precision and accuracy of UCAR temperature and water vapor data products. Compared to the collocated RS41, the STAR temperature differences are less than a few tenths of 1 K from 8 km to 30 km altitude with a std of 1.5–2 K. We have compared the STAR 1D-Var-derived water vapor profiles with those collocated RAOB profiles. The magnitude and altitude dependence of RO-RAOB water vapor difference for COSMIC-2 is close to what has been obtained from the COSMIC mission compared to other radiosondes [3]. Further comparisons of STAR RO thermal profiles with those derived from the UCAR 1D-Var algorithm and Vaisala radiosondes are detailed in [37].
- (iii).
- Using STAR COSMIC-2 1D-Var results for climate monitoring. Using reanalysis as a reference, we identified the sudden change in the time series in the current UCAR near-real-time COSMIC-2 data. When comparing with the reanalysis and STAR COSMIC-2 1D-Var results, we further recognized that the possible causes of the sudden jump of the UCAR COSMIC-2, which might be owing to their (i) inversion implementations and (ii) the a priori used.
- (iv).
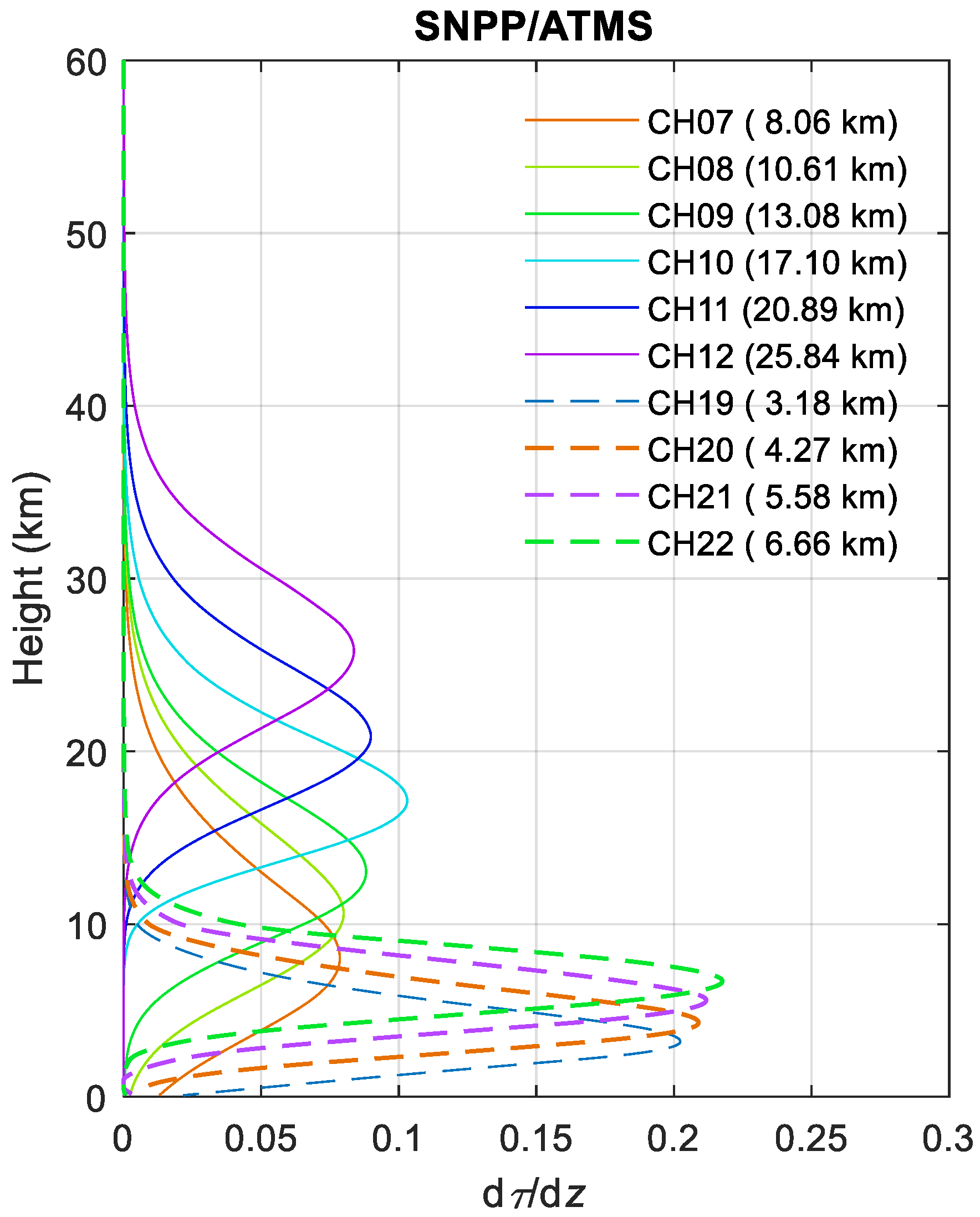
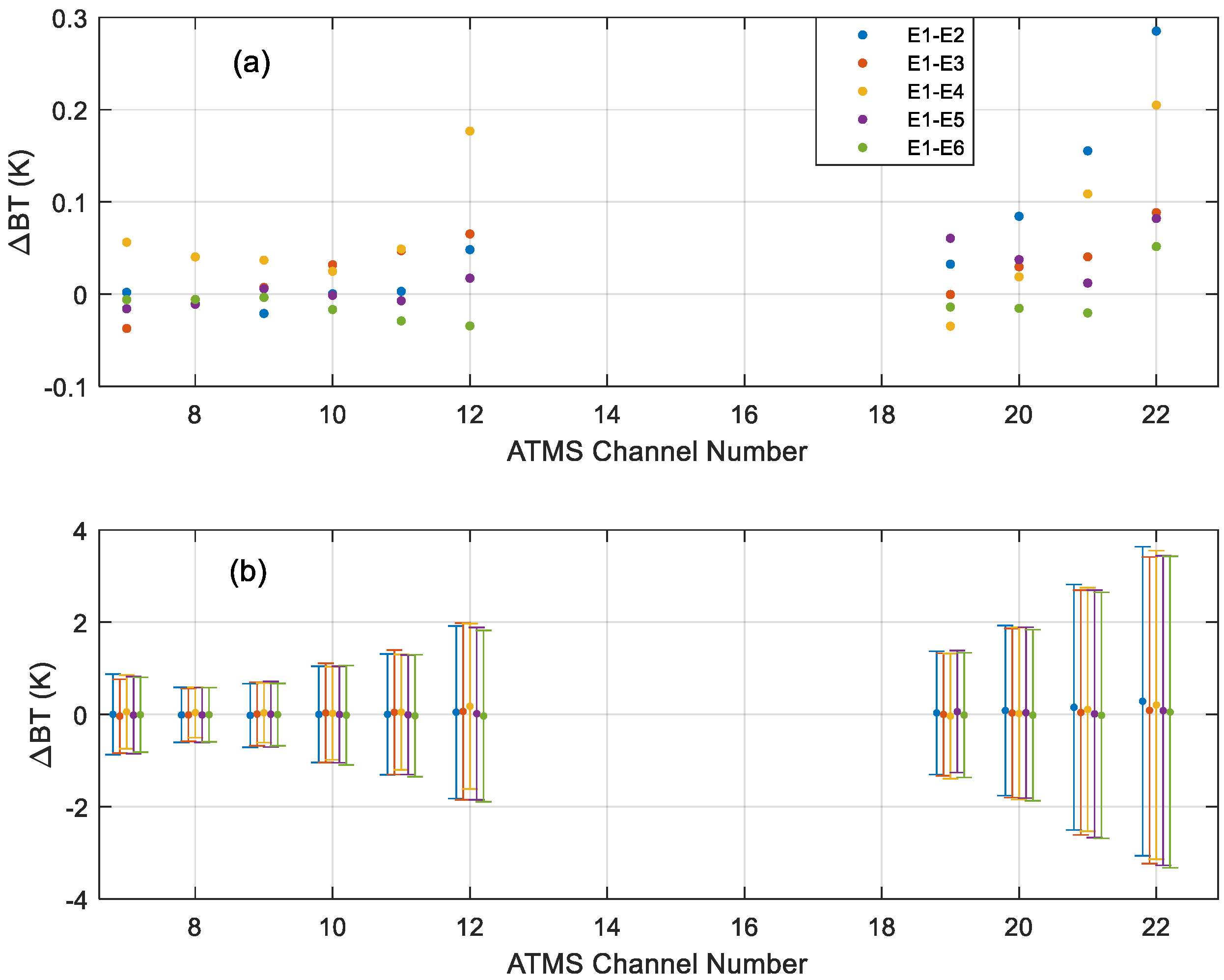
- Compared to CrIS and ATMS brightness temperatures. In general, the STAR WetPrf-derived BT differences between five COSMIC-2 (E2–E6) sensors and COSMIC-2 E1 sensor are within ±0.1 K for ATMS temperature-sounding channels CH07 to CH011 (peak sounding height from 8.06 to 20.89 km) and water vapor sounding channel CH19-20 (peak sounding height from 3.18 to 4.27 km). The RO-derived water vapor profiles in the neutral atmosphere are complemented by those from satellite infrared (IR) and microwave (MW) sounders [1,2,3,4] and provide total water vapor column and vertical water vapor variation under all-sky conditions and within and below clouds [7,8,9,10,11,12,13,14,15,16,17,18,19,20,21,22,23,24,25,26,27].
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ho, S.-P.; Goldberg, M.; Kuo, Y.-H.; Zou, C.-Z.; Shiau, W. Calibration of Temperature in the Lower Stratosphere from Microwave Measurements Using COSMIC Radio Occultation Data: Preliminary Results. Terr. Atmos. Ocean. Sci. 2009, 20, 87. [Google Scholar] [CrossRef] [Green Version]
- Bean, B.R.; Dutton, E.J. Radio Meteorology. National Bureau of Standards Monogr., No. 92; U.S. Government Printing Office: Washington, DC, USA, 1966; p. 435.
- Ho, S.-P.; Zhou, X.; Kuo, Y.-H.; Hunt, D.; Wang, J.-H. Global Evaluation of Radiosonde Water Vapor Systematic Biases using GPS Radio Occultation from COSMIC and ECMWF Analysis. Remote Sens. 2010, 2, 1320–1330. [Google Scholar] [CrossRef] [Green Version]
- Ho, S.-P.; Kuo, Y.-H.; Schreiner, W.; Zhou, X. Using SI-traceable global positioning system radio occultation measurements for climate monitoring [In “State of the Climate in 2009”]. Bull. Am. Meteorol. Soc. 2010, 91, S36–S37. [Google Scholar]
- Healy, S.; Eyre, J. Retrieving temperature, water vapor, and surface pressure information from refractivity-index profiles derived by radio occultation: A simulation study. Q. J. Royal Meteorol. Soc. 2000, 126, 1661–1683. [Google Scholar] [CrossRef]
- Li, Y.; Kirchengast, G.; Scherllin-Pirscher, B.; Schwaerz, M.; Nielsen, J.K.; Wee, T.-K.; Ho, S.-P.; Yuan, Y.-B. A new algorithm for the retrieval of atmospheric profiles from GNSS radio occultation data in moist air and cross-evaluation among processing centers. Remote Sens. 2019, 11, 2729. [Google Scholar] [CrossRef] [Green Version]
- Ho, S.-P.; Smith, W.L.; Huang, H.L. The Retrieval of Atmospheric Temperature and Water Vapor Profile using Combined Satellite and Ground Based Infrared Spectral Radiance Measurements. Appl. Opt. 2002, 41, 4057–4069. [Google Scholar] [CrossRef]
- Ho, S.P.; Kuo, Y.H.; Sokolovskiy, S. Improvement of the temperature and moisture retrievals in the lower troposphere using AIRS and GPS radio occultation measurements. J. Atmos. Ocean. Technol. 2007, 24, 1726–1739. [Google Scholar] [CrossRef]
- Ho, S.P.; Yue, X.; Zeng, Z.; Ao, C.O.; Huang, C.Y.; Kursinski, E.R.; Kuo, Y.H. Applications of COSMIC radio occultation data from the troposphere to ionosphere and potential impacts of COSMIC-2 data. Bull. Am. Meteorol. Soc. 2014, 95, ES18–ES22. [Google Scholar] [CrossRef]
- Ho, S.-P.; Peng, L.; Anthes, R.A.; Kuo, Y.-H.; Lin, H.-C. Marine Boundary Layer Heights and Their Longitudinal, Diurnal, and Interseasonal Variability in the Southeastern Pacific Using COSMIC, CALIOP, and Radiosonde Data. J. Clim. 2015, 28, 2856–2872. [Google Scholar] [CrossRef] [Green Version]
- Ho, S.-P.; Peng, L.; Vömel, H. Characterization of the long-term radiosonde temperature biases in the upper troposphere and lower stratosphere using COSMIC and Metop-A/GRAS data from 2006 to 2014. Atmos. Chem. Phys. 2017, 17, 4493–4511. [Google Scholar] [CrossRef] [Green Version]
- Ho, S.-P.; Peng, L.; Mears, C.; Anthes, R.A. Comparison of global observations and trends of total precipitable water derived from microwave radiometers and COSMIC radio occultation from 2006 to 2013. Atmos. Chem. Phys. 2018, 18, 259–274. [Google Scholar] [CrossRef]
- Ho, S.-P.; Peng, L. Global water vapor estimates from measurements from active GPS RO sensors and passive infrared and microwave sounders. In Green Chemistry Applications; IntechOpen: London, UK, 2018. [Google Scholar] [CrossRef]
- Ho, S.-P.; Anthes, R.A.; Ao, C.O.; Healy, S.; Horanyi, A.; Hunt, D.; Mannucci, A.J.; Pedatella, N.; Randel, W.J.; Simmons, A. The COSMIC/FORMOSAT-3 Radio Occultation Mission after 12 Years: Accomplishments, Remaining Challenges, and Potential Impacts of COSMIC-2. Bull. Amer. Meteor. Soc. 2020, 101, E1107–E1136. [Google Scholar] [CrossRef] [Green Version]
- Ho, S.-P.; Zhou, X.; Shao, X.; Zhang, B.; Adhikari, L.; Kireev, S.; He, Y.; Yoe, J.; Xia-Serafino, W.; Lynch, E. Initial Assessment of the COSMIC-2/FORMOSAT-7 Neutral Atmosphere Data Quality in NESDIS/STAR Using In Situ and Satellite Data. Remote Sens. 2020, 12, 4099. [Google Scholar] [CrossRef]
- Huang, C.; Teng, W.; Ho, S.; Kuo, Y. Global variation of COSMIC precipitable water over land: Comparisons with ground-based GPS measurements and NCEP reanalyses. Geophys. Res. Lett. 2013, 40, 5327–5331. [Google Scholar] [CrossRef]
- Teng, W.-H.; Huang, C.-Y.; Ho, S.-P.; Kuo, Y.-H.; Zhou, X.-J. Characteristics of global precipitable water in ENSO events revealed by COSMIC measurements. J. Geophys. Res. Atmos. 2013, 118, 8411–8425. [Google Scholar] [CrossRef]
- Biondi, R.; Randel, W.J.; Ho, S.-P.; Neubert, T.; Syndergaard, S. Thermal structure of intense convective clouds derived from GPS radio occultations. Atmos. Chem. Phys. 2012, 12, 5309–5318. [Google Scholar] [CrossRef] [Green Version]
- Biondi, R.; Ho, S.-P.; Randel, W.; Syndergaard, S.; Neubert, T. Tropical cyclone cloud-top height and vertical temperature structure detection using GPS radio occultation measurements. J. Geophys. Res. Atmos. 2013, 118, 5247–5259. [Google Scholar] [CrossRef]
- Xue, Y.H.; Li, J.; Menzel, P.; Borbas, E.; Ho, S.-P.; Li, Z. Impact of Sampling Biases on the Global Trend of Total Precipitable Water Derived from the Latest 10-Year Data of COSMIC, SSMIS and HIRS Observations. J. Geophys. Res. Atmos. 2018, 124, 6966–6981. [Google Scholar]
- Zeng, Z.; Ho, S.-P.; Sokolovskiy, S. The Structure and Evolution of Madden- Julian Oscillation from FORMOSAT-3/COSMIC Radio Occultation Data. J. Geophys. Res. 2012, 117, D22108. [Google Scholar] [CrossRef]
- Schröder, M.; Lockhoff, M.; Shi, L.; August, T.; Bennartz, R.; Brogniez, H.; Calbet, X.; Fell, F.; Forsythe, J.; Gambacorta, A.; et al. The GEWEX water vapor assessment: Overview and introduction to results and recommendations. Remote Sens. 2018, 11, 251. [Google Scholar] [CrossRef] [Green Version]
- Mears, C.; Ho, S.P.; Wang, J.; Huelsing, H.; Peng, L. Total Column Water Vapor [In “States of the Climate in 2018”]. Bull. Amer. Meteor. Soc. 2019, 98, S24–S25. [Google Scholar] [CrossRef]
- Mears, C.; Wang, J.; Ho, S.P.; Zhang, L.; Zhou, X. Total Column Water Vapor [In “States of the Climate in 2020”]. Bull. Amer. Meteor. Sci. 2021, in press. [Google Scholar]
- Rieckh, T.; Anthes, R.; Randel, W.; Ho, S.-P.; Foelsche, U. Tropospheric dry layers in the tropical western Pacific: Comparisons of GPS radio occultation with multiple data sets. Atmos. Meas. Tech. 2017, 10, 1093–1110. [Google Scholar] [CrossRef] [Green Version]
- Rieckh, T.; Anthes, R.; Randel, W.; Ho, S.-P.; Foelsche, U. Evaluating tropospheric humidity from GPS radio occultation, radiosonde, and AIRS from high-resolution time series. Atmos. Meas. Tech. 2018, 11, 3091–3109. [Google Scholar] [CrossRef] [Green Version]
- Liu, C.-Y.; Li, J.; Ho, S.-P.; Liu, G.-R.; Lin, T.-H.; Young, C.-C. Retrieval of Atmospheric Thermodynamic State From Synergistic Use of Radio Occultation and Hyperspectral Infrared Radiances Observations. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 744–756. [Google Scholar] [CrossRef]
- Gorbunov, M. The influence of the signal-to-noise ratio upon radio occultation inversion quality. Atmos. Meas. Tech. Discuss. 2020. preprint. [Google Scholar] [CrossRef] [Green Version]
- Ho, S.-P.; Hunt, D.; Steiner, A.; Mannucci, A.J.; Kirchengast, G.; Gleisner, H.; Heise, S.; Von Engeln, A.; Marquardt, C.; Sokolovskiy, S.; et al. Reproducibility of GPS radio occultation data for climate monitoring: Profile-to-profile inter-comparison of CHAMP climate records 2002 to 2008 from six data centers. J. Geophys. Res. Earth Surf. 2012, 117, D18111. [Google Scholar] [CrossRef]
- Steiner, A.K.; Ladstädter, F.; Ao, C.O.; Gleisner, H.; Ho, S.-P.; Hunt, D.; Schmidt, T.; Foelsche, U.; Kirchengast, G.; Kuo, Y.-H.; et al. Consistency and structural uncertainty of multi-mission GPS radio occultation records. Atmos. Meas. Tech. 2020, 13, 2547–2575. [Google Scholar] [CrossRef]
- Ho, S.-P.; Kirchengast, G.; Leroy, S.; Wickert, J.; Mannucci, A.J.; Steiner, A.; Hunt, D.; Schreiner, W.; Sokolovskiy, S.; Ao, C.; et al. Estimating the uncertainty of using GPS radio occultation data for climate monitoring: Intercomparison of CHAMP refractivity climate records from 2002 to 2006 from different data centers. J. Geophys. Res. Earth Surf. 2009, 114, D23107. [Google Scholar] [CrossRef] [Green Version]
- Zhang, B.; Ho, S.-P.; Cao, C.; Shao, X.; Dong, D.; Chen, Y. Verification and Validation of the COSMIC-2 Excess Phase and Bending Angle Algorithms for Data Quality Assurance at STAR. Remote Sens. 2022, 14, 3288. [Google Scholar] [CrossRef]
- Adhikari, L.; Ho, S.P.; Zhou, X. Inverting COSMIC-2 Phase Data to Bending Angle and Refractivity Profiles Using the Full Spectrum Inversion Method. Remote Sens. 2021, 13, 1793. [Google Scholar] [CrossRef]
- Miller, W.; Chen, Y.; Ho, S.-P.; Shao, X. Evaluating the Impacts of COSMIC-2 GNSS RO Bending Angle Assimilation on Atlantic Hurricane Forecasts Using the HWRF Model. Monthly Weather Rev. 2022. under review. [Google Scholar]
- Chen, Y.; Shao, X.; Cao, C.-Y.; Ho, S.-P. Simultaneous Radio Occultation Predictions for Inter-Satellite Comparison of Bending Angle Profiles from COSMIC-2 and GeoOptics. Remote Sens. 2021, 13, 3644. [Google Scholar] [CrossRef]
- Chen, Y.; Cao, C.; Shao, X.; Ho, S.P. Assessment of the Consistency and Stability of CrIS Infrared Observations Using COSMIC-2 Radio Occultation Data over Ocean. Remote Sens. 2021, 14, 2721. [Google Scholar] [CrossRef]
- Shao, X.; Ho, S.-P.; Zhang, B.; Cao, C.; Chen, Y. Consistency and Stability of SNPP ATMS Microwave Observations and COSMIC-2 Radio Occultation over Oceans. Remote Sens. 2021, 13, 3754. [Google Scholar] [CrossRef]
- Shao, X.; Ho, S.-P.; Zhang, B.; Zhou, X.; Kireev, S.; Chen, Y.; Cao, C.-Y. Comparison of COSMIC-2 Radio Occultation Retrievals with RS41 and RS92 Radiosonde Humidity and Temperature Measurements. Terr. Atmos. Ocean. Sci. 2022, 32, 1015–1032. [Google Scholar] [CrossRef]
- Cao, C.; Wang, W.; Lynch, E.; Bai, Y.; Ho, S.-P.; Zhang, B. Simultaneous Radio Occultation for intersatellite comparison of bending angle toward more accurate atmospheric sounding. J. Atmos. Ocean. Technol. 2020, 37, 2307–2320. [Google Scholar] [CrossRef]
- Wee, T.-K. A variational regularization of Abel transform for GPS radio occultation. Atmos. Meas. Tech. 2018, 11, 1947–1969. [Google Scholar] [CrossRef] [Green Version]
- Anthes, R.A.; Bernhardt, P.A.; Chen, Y.; Cucurull, L.; Dymond, K.F.; Ector, D.; Healy, S.B.; Ho, S.-P.; Hunt, D.C.; Kuo, Y.; et al. The COSMIC/FORMOSAT-3 Mission: Early Results. Bull. Am. Meteorol. Soc. 2008, 89, 313–334. [Google Scholar] [CrossRef]
- Kuo, Y.-H.; Wee, T.-K.; Sokolovskiy, S.; Rocken, C.; Schreiner, W.; Hunt, D.; Anthes, R. Inversion and Error Estimation of GPS Radio Occultation Data. J. Meteorol. Soc. Jpn. Ser. II 2004, 82, 507–531. [Google Scholar] [CrossRef] [Green Version]
- Han, Y.; Revercomb, H.; Cromp, M.; Gu, D.G.; Johnson, D.; Mooney, D. Suomi NPP CrIS measurements, sensor data record algorithm, calibration and validation activities, and record data quality. J. Geophys. Res. Atmos. 2013, 118, 12734–12748. [Google Scholar] [CrossRef]
- Rodgers, C.D. Retrieval of atmospheric temperature and composition from remote measurements of thermal radiation. Rev. Geophys. Space Phys. 1976, 14, 609–624. [Google Scholar] [CrossRef]
- Chen, Y.; Weng, F.; Han, Y.; Liu, Q. Validation of the Community Radiative Transfer Model by using CloudSat data. J. Geophys. Res. Atmos. 2008, 113, D8. [Google Scholar] [CrossRef]
- Chen, Y.; Han, Y.; Van Delst, P.; Weng, F. On water vapor Jacobian in fast radiative transfer model. J. Geophys. Res. Atmos. 2010, 115, D12303. [Google Scholar] [CrossRef]
- Chen, Y.; Iturbide-Sanchez, F.; Tremblay, D.; Tobin, D.; Strow, L.; Wang, L.; Mooney, D.L.; Johnson, D.; Predina, J.; Revercomb, H.E.; et al. Reprocessing of Suomi NPP CrIS Sensor Data Records to Improve the Radiometric and Spectral Long-Term Accuracy and Stability. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–14. [Google Scholar] [CrossRef]
- Chen, Y.; Han, Y.; Weng, F. Characterization of Long-Term Stability of Suomi NPP Cross-Track Infrared Sounder Spectral Calibration. IEEE Trans. Geosci. Remote Sens. 2017, 55, 1147–1159. [Google Scholar] [CrossRef]
- Lin, C.C.; Yang, S.C.; Ho, S.P.; Pedatella, N.M. Exploring the terrestrial and space weather using an operational radio occultation satellite constellation—A FORMOSAT-7/COSMIC-2 Special Issue after 1-year on orbit. Terr. Atmos. Ocean. Sci. 2022, 32, 1–3. [Google Scholar] [CrossRef]
- Ho, S.-P.; Pedatella, N.; Foelsche, U.; Healy, S.; Weiss, J.P.; Ullman, R. Using Radio Occultation Data for Atmospheric Numerical Weather Prediction, Climate Sciences, and Ionospheric Studies and Initial Results from COSMIC-2, Commercial RO Data, and Recent RO Missions. Bul. Amer. Meteor. Sci. 2022. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| L1 SNR Range | Mean Difference (STDs) (g/kg) |
|---|---|
| 300–500 V/V | −0.76 (1.14) |
| 500–1000 V/V | −0.31 (1.02) |
| 1000–1500 V/V | −0.30 (1.13) |
| 1500–2000 V/V | −0.44 (1.24) |
| >2000 V/V | −0.22 (1.16) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ho, S.-p.; Kireev, S.; Shao, X.; Zhou, X.; Jing, X. Processing and Validation of the STAR COSMIC-2 Temperature and Water Vapor Profiles in the Neutral Atmosphere. Remote Sens. 2022, 14, 5588. https://doi.org/10.3390/rs14215588
Ho S-p, Kireev S, Shao X, Zhou X, Jing X. Processing and Validation of the STAR COSMIC-2 Temperature and Water Vapor Profiles in the Neutral Atmosphere. Remote Sensing. 2022; 14(21):5588. https://doi.org/10.3390/rs14215588
Chicago/Turabian StyleHo, Shu-peng, Stanislav Kireev, Xi Shao, Xinjia Zhou, and Xin Jing. 2022. "Processing and Validation of the STAR COSMIC-2 Temperature and Water Vapor Profiles in the Neutral Atmosphere" Remote Sensing 14, no. 21: 5588. https://doi.org/10.3390/rs14215588