

Analysis of the Long-Term Characteristics of BDS On-Orbit Satellite Atomic Clock: Since BDS-3 Was Officially Commissioned
Abstract
:1. Introduction
2. Experimental Data
2.1. Satellite Atomic Clock and Orbit Information of BDS
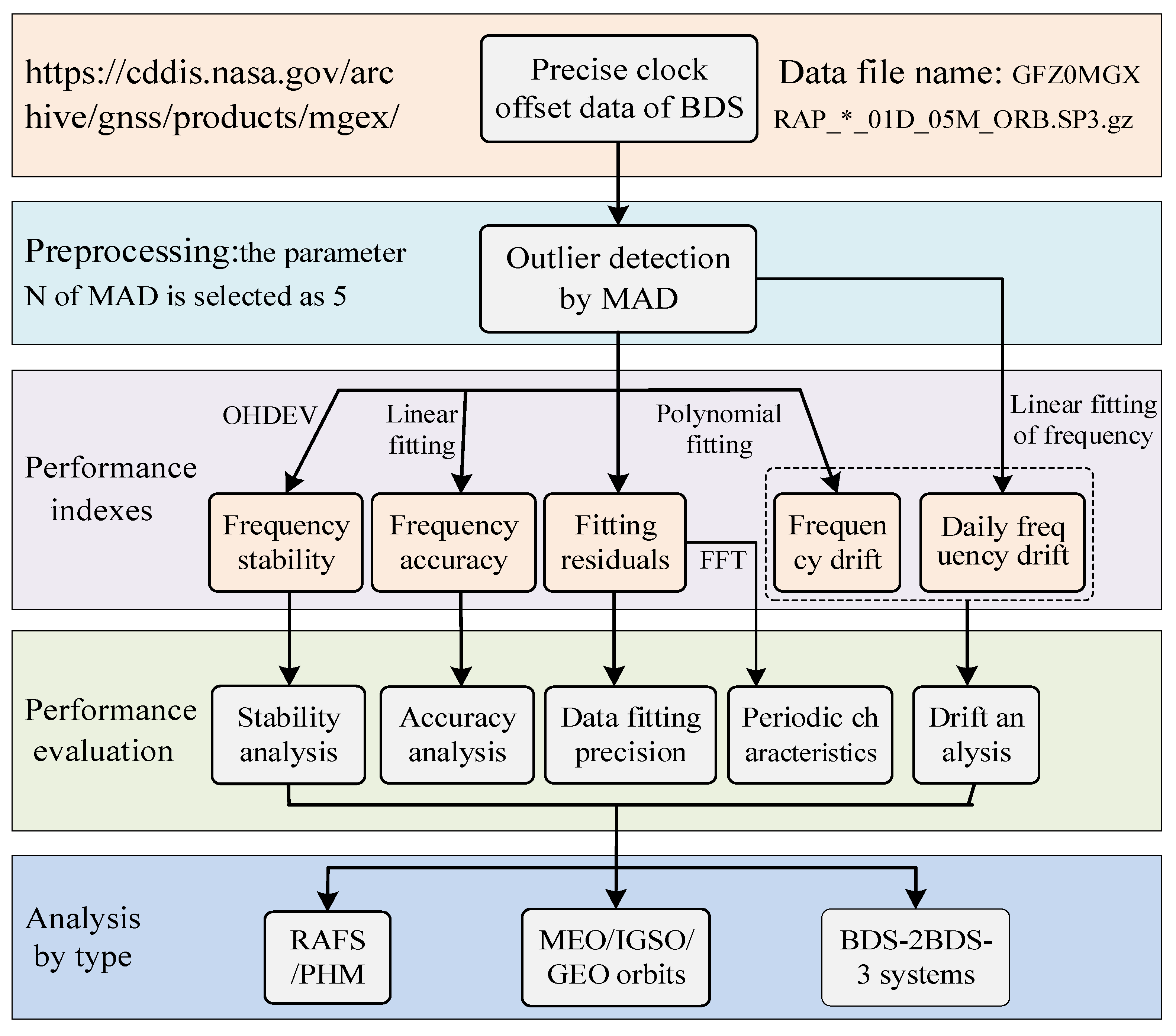
2.2. Data Collection
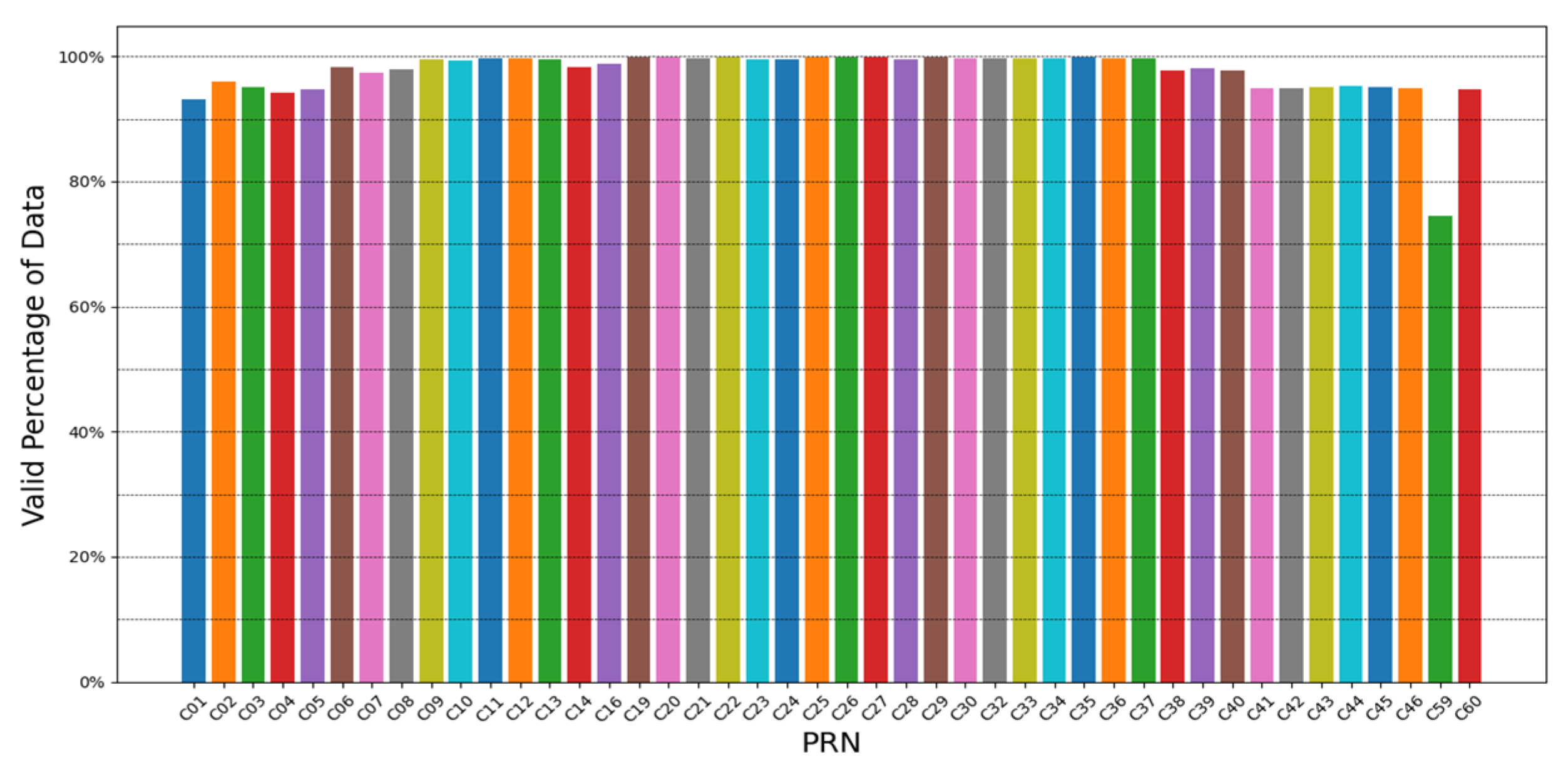
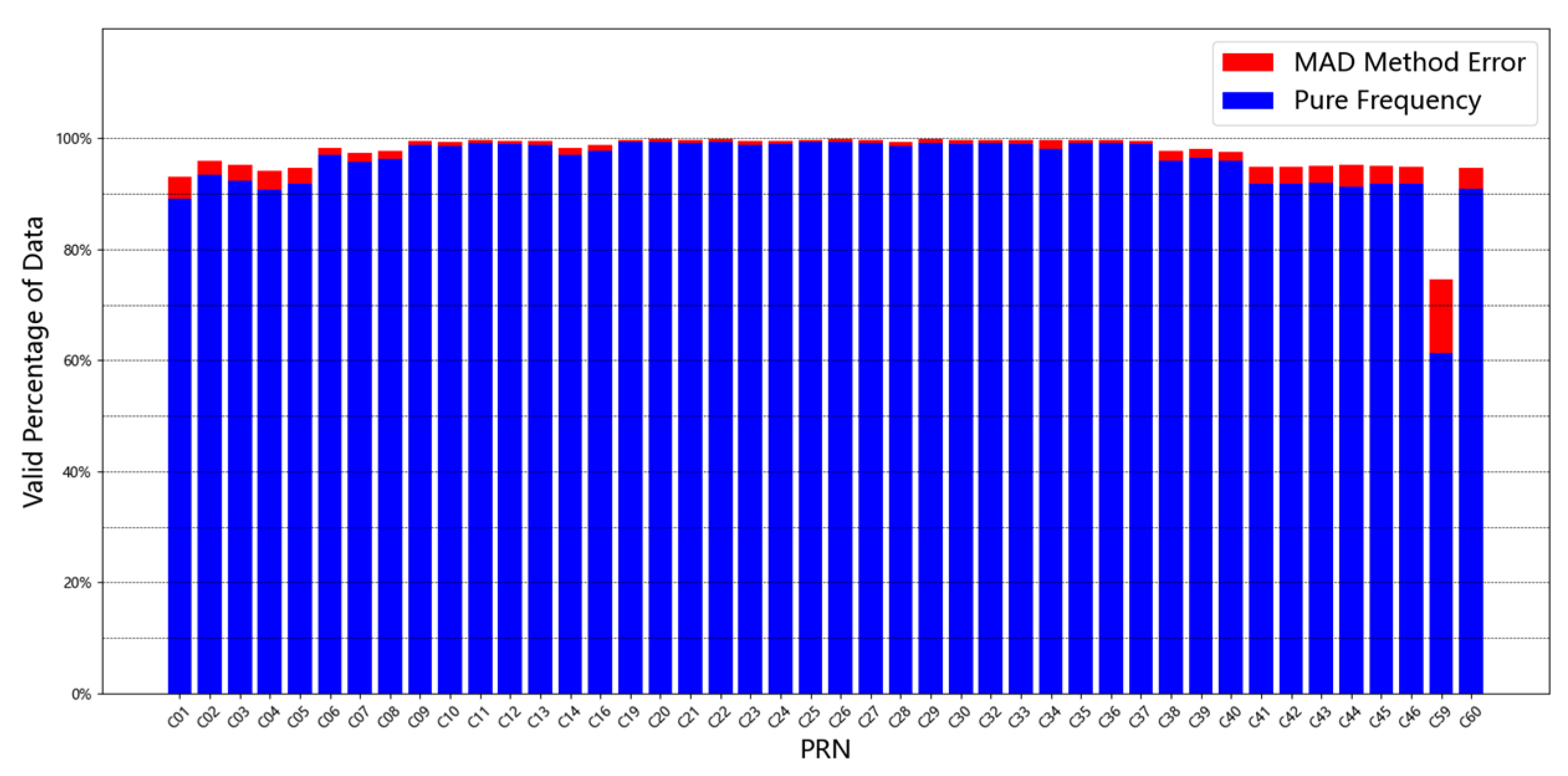
2.3. Outlier Detection
3. Analysis Methods
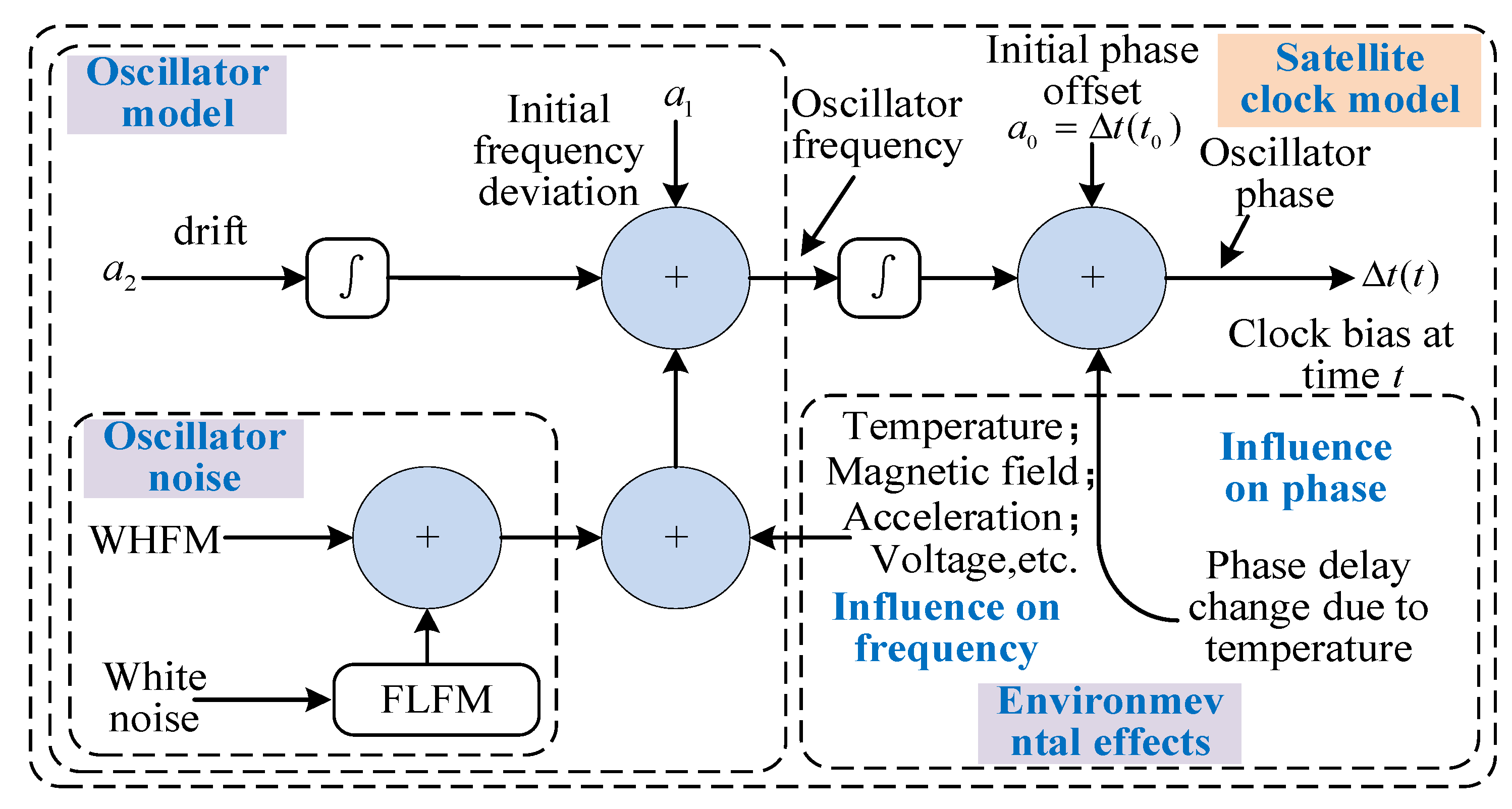
3.1. Satellite Atomic Clock Model and Noise Characteristic
- (1)
- Initial clock offset, , which represents the clock difference at time ;
- (2)
- Initial frequency offset, , which represents the relative frequency deviation at time ;
- (3)
- The frequency drift, , which represents the linear change of relative frequency deviation.
- expresses the periodic component in the phase, which was shown in the figure as environmental effects;
- , are two independent Wiener processes as oscillator noise in the figure, representing the random component of the clock offset, respectively;
- is the observation noise.
3.2. Main Performance Metrics of the Satellite Atomic Clock
- (1)
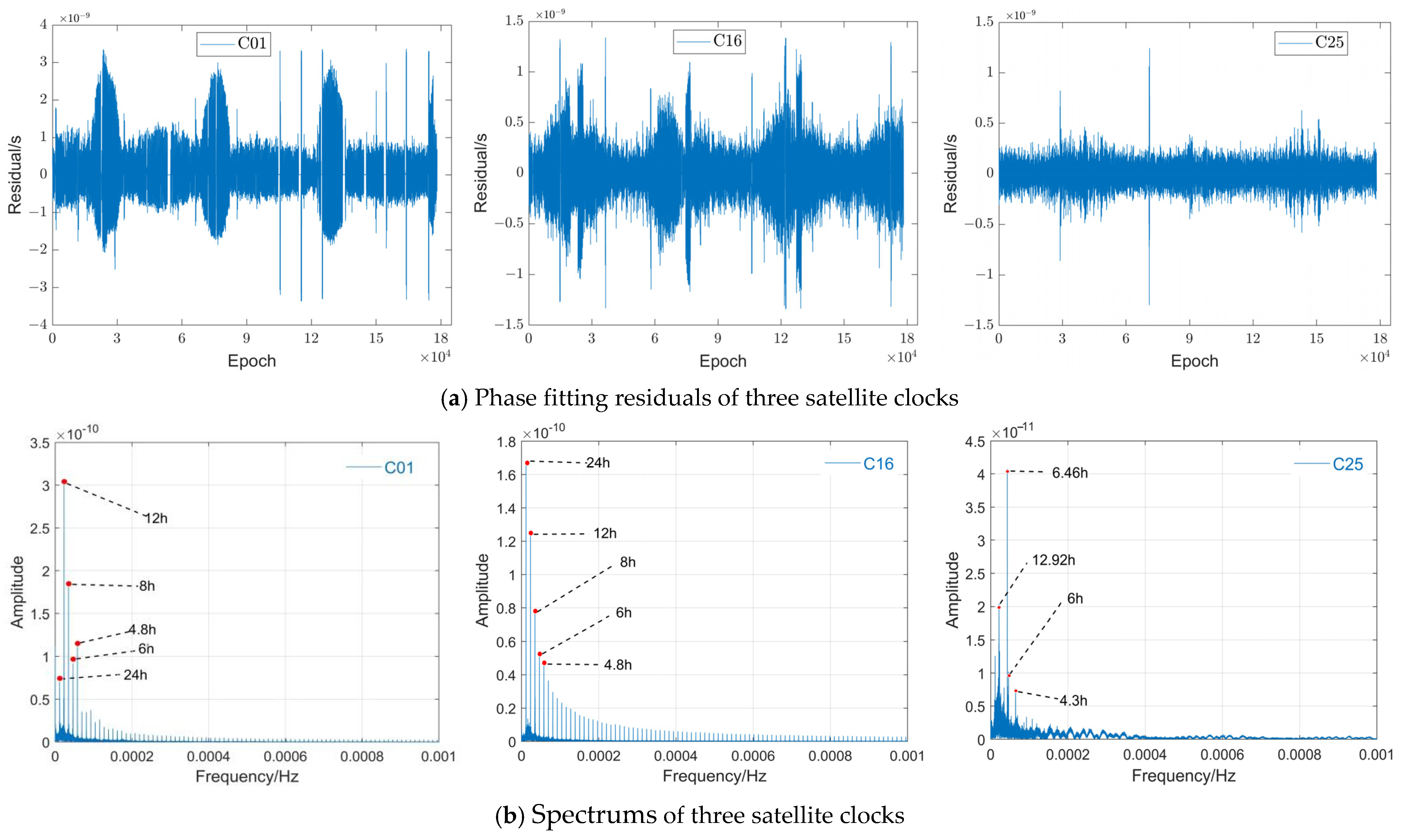
- Fitting residual and periodic characteristic analysis
- (2)
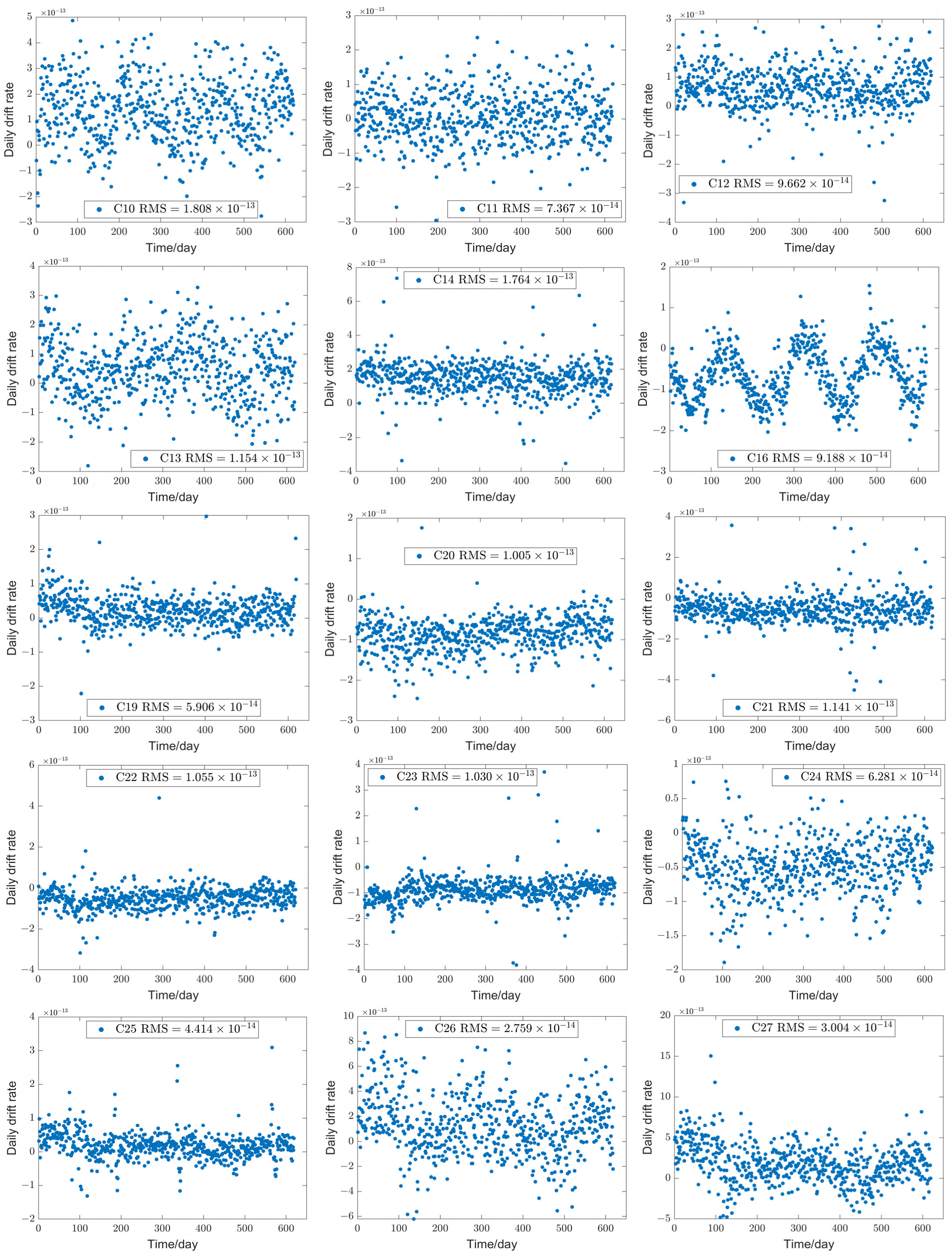
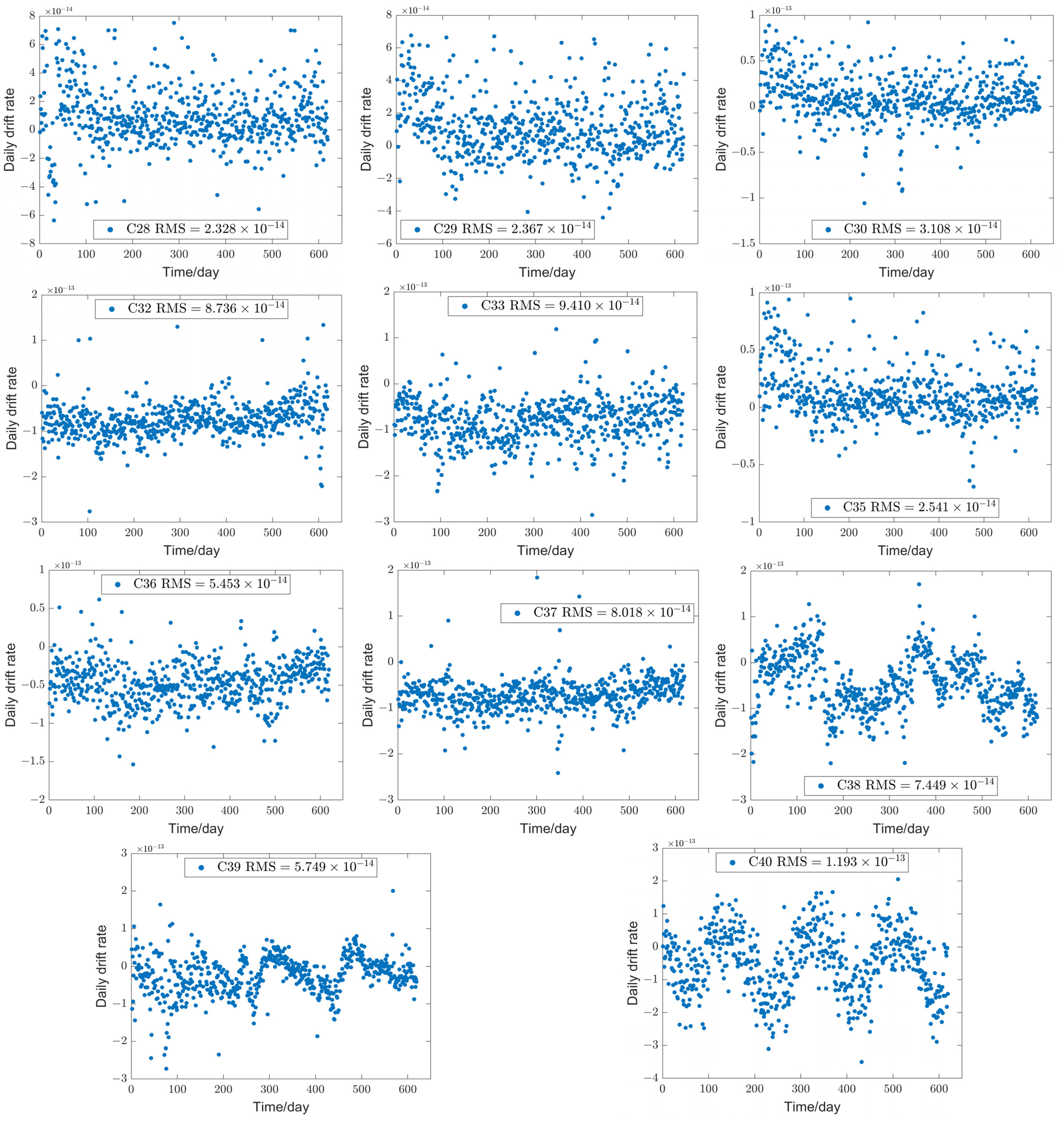
- Frequency drift rate
- (3)
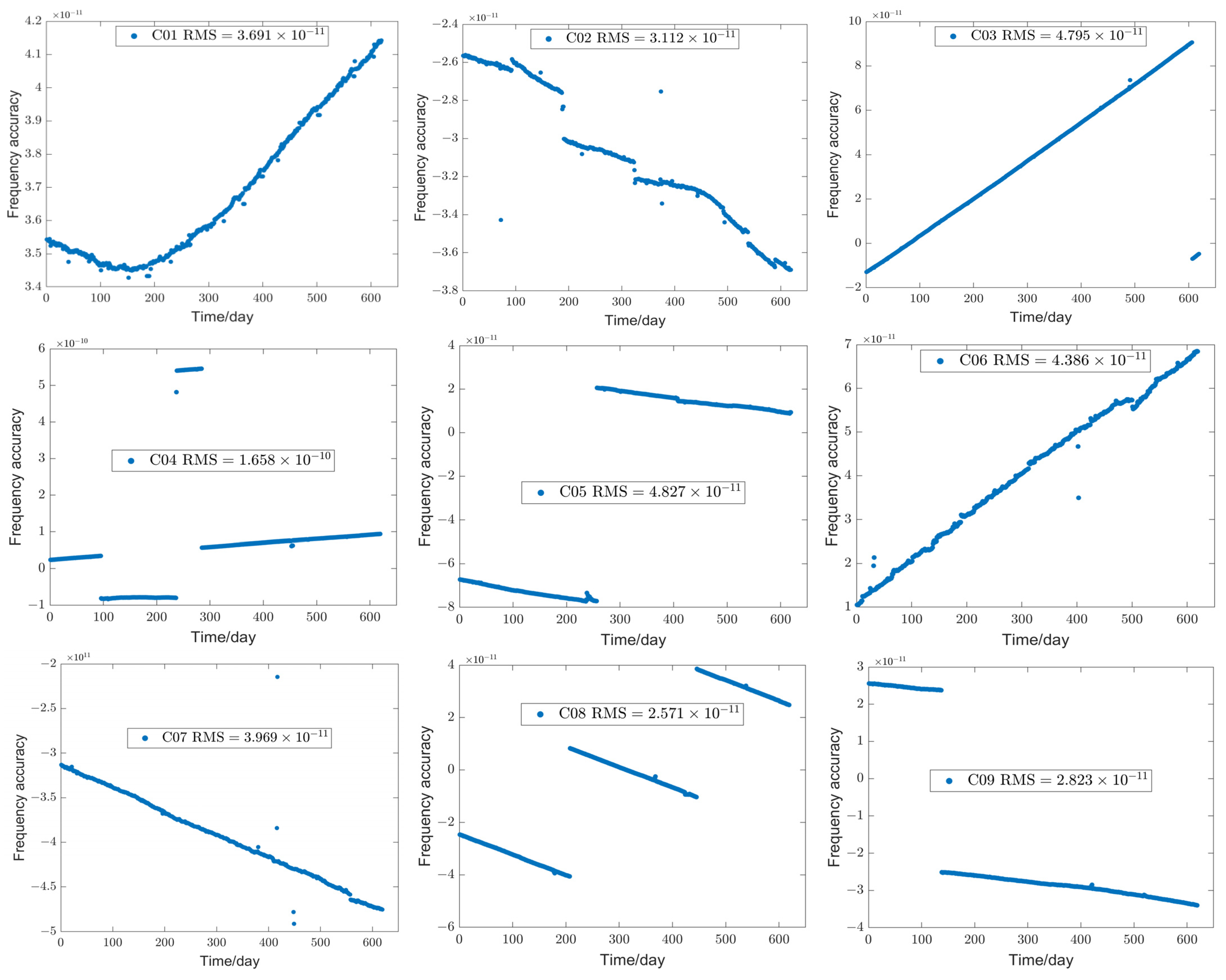
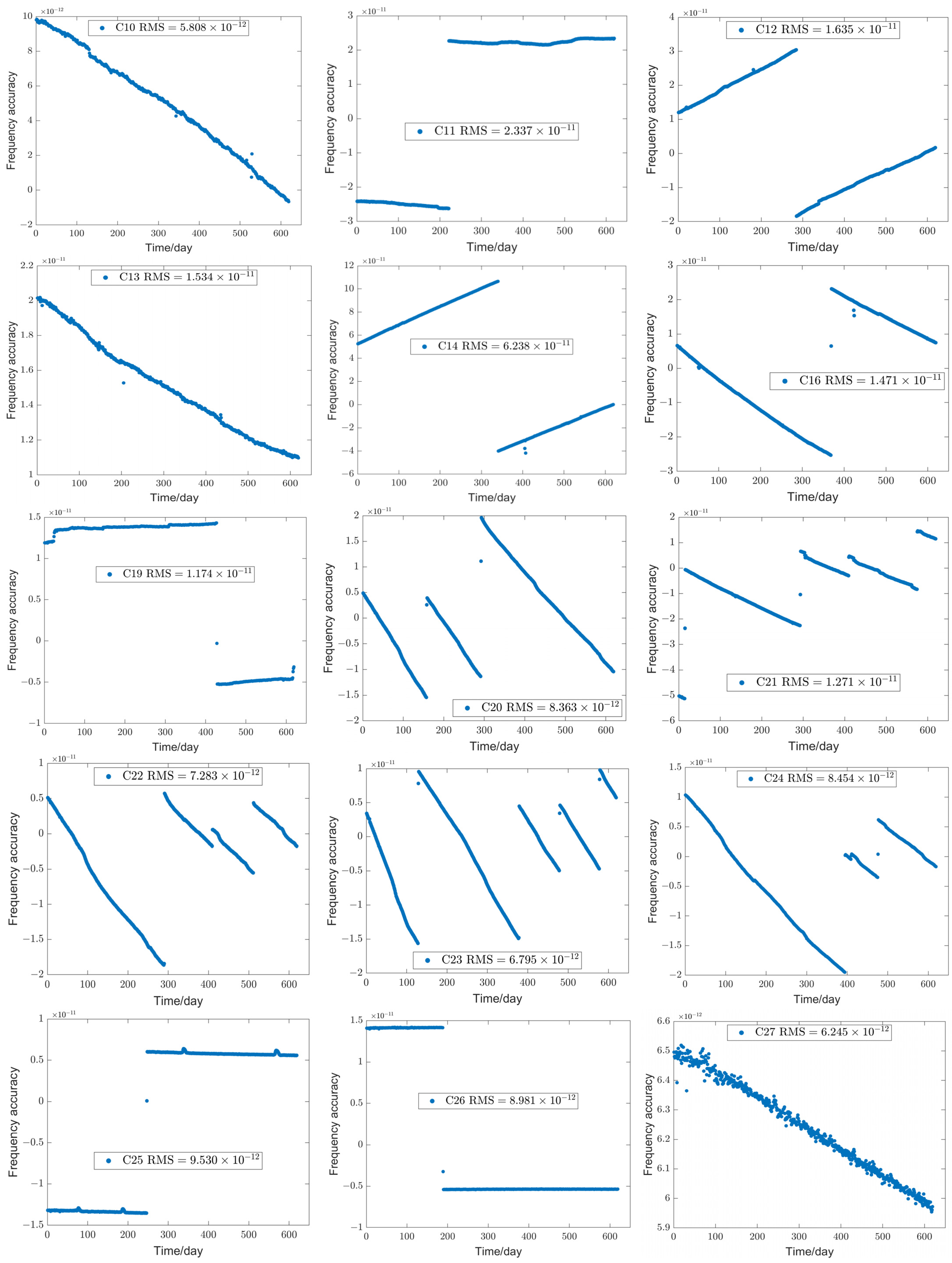
- Frequency accuracy
- (4)
- Frequency stability
3.3. Main Performance Metrics of the Satellite Atomic Clock
- (1)
- During outlier detection, the daily frequency data are detected. The value of N is the empirical value, which is determined as 5 in this study. If the ratio of outliers in the day is lower than 20%, the processed data is used normally; otherwise, the data of the corresponding date will not be analyzed.
- (2)
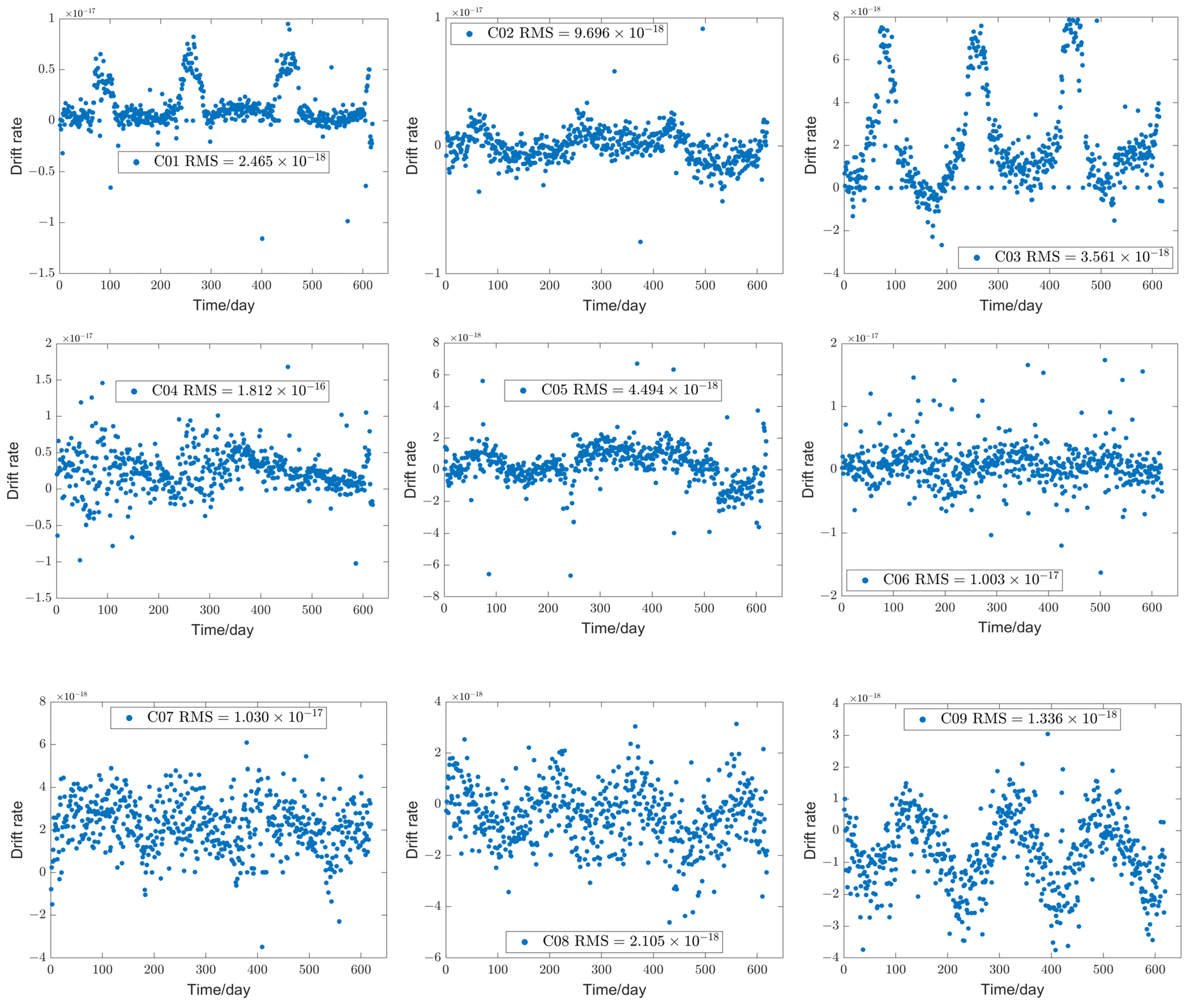
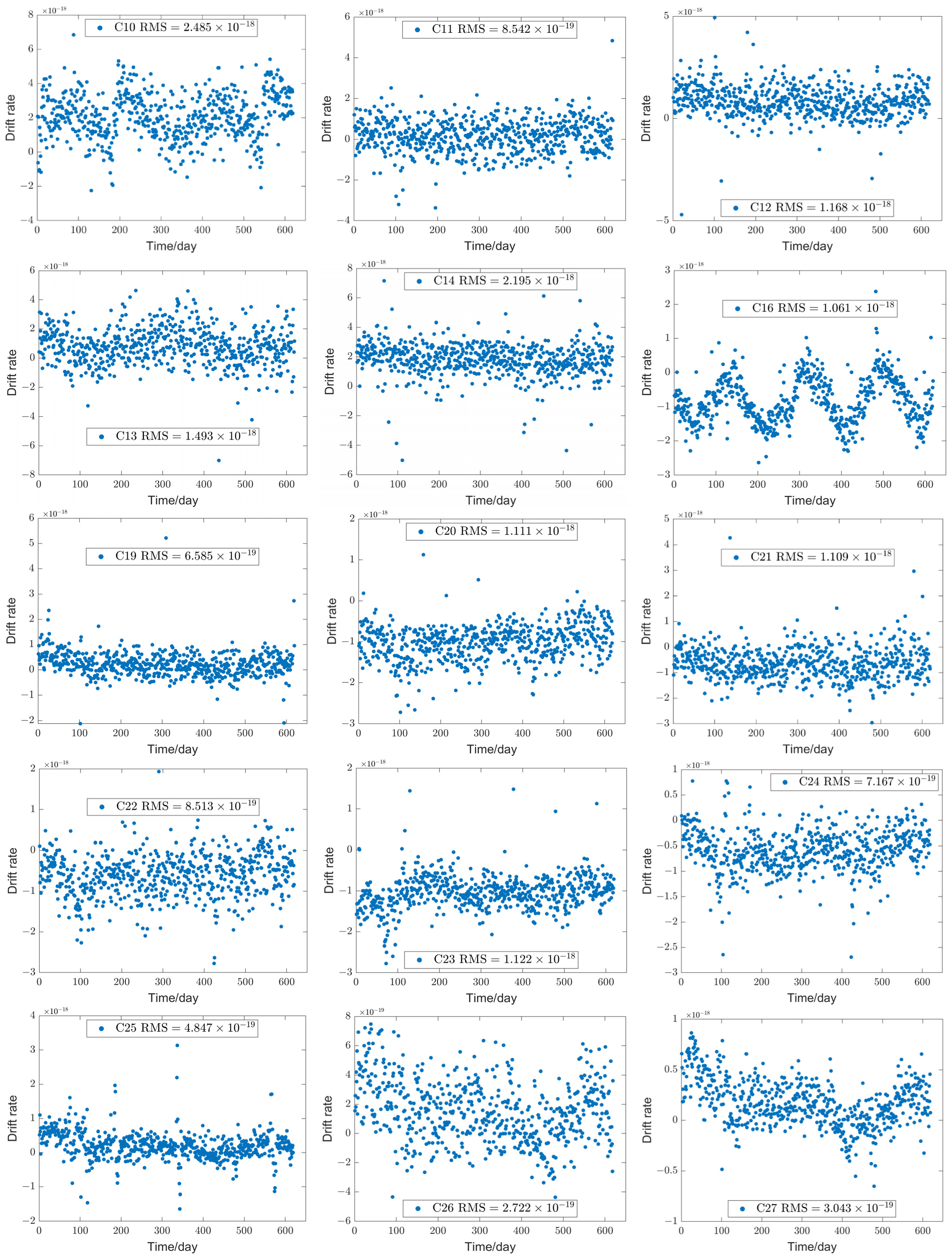
- In terms of frequency drift rate, the drift rate and the daily drift rate are calculated to comprehensively reflect the short-term and long-term drift characteristics of the atomic clock.
- (3)
- The calculation of frequency stability requires large volumes of data to obtain high confidence levels. The frequency stability is calculated when the smoothing time is 10,200 s (smoothing factor of 34) and 86,400 s (smoothing factor of 288), representing the stability of 10,000 s and the daily stability, respectively. The stability index is given in different months to reflect its change trend.
4. Characteristics of the BDS Satellite Clock
4.1. Satellite Atomic Clock Model and Noise Characteristic
4.2. Frequency Drift Rate
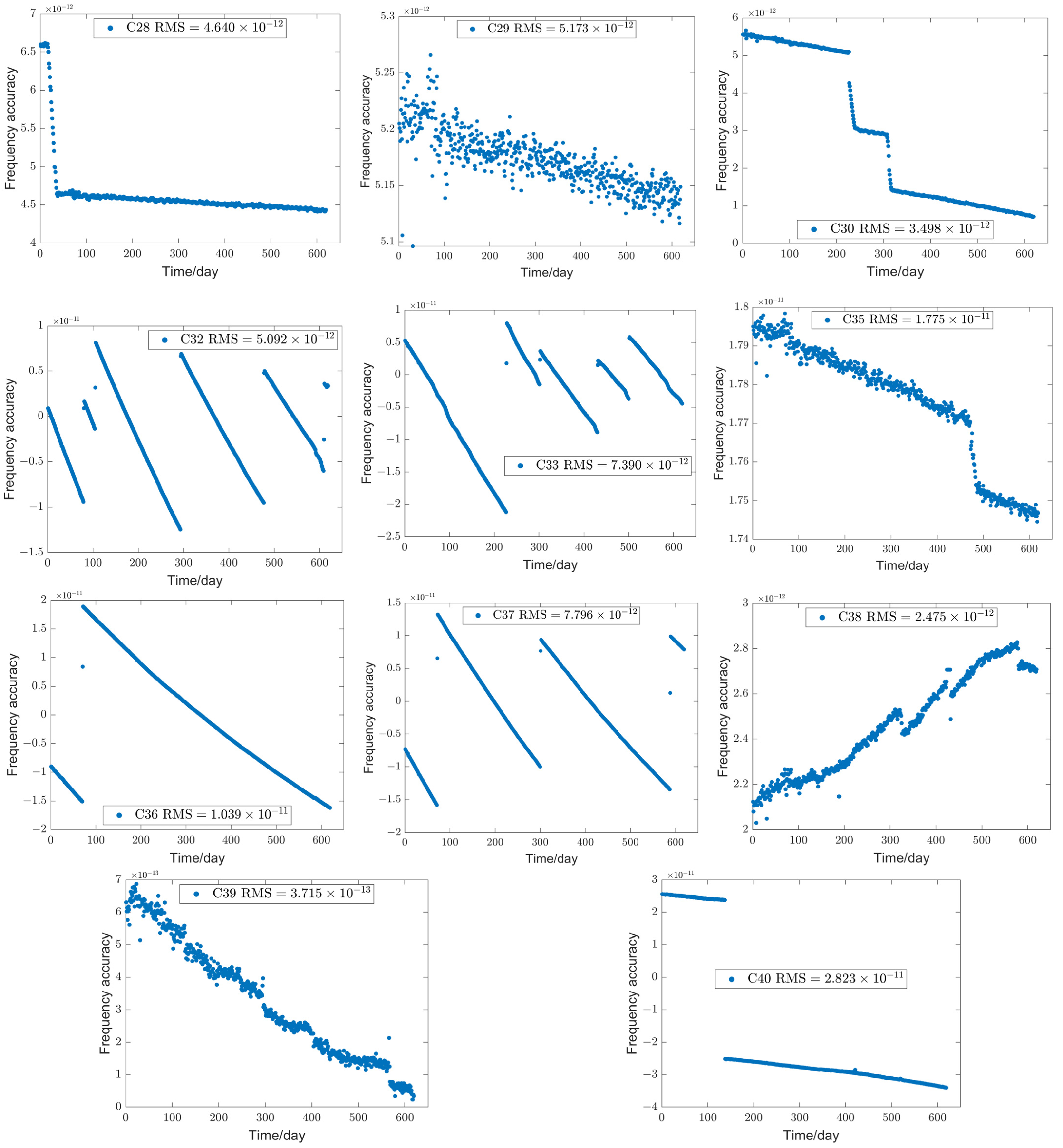
4.3. Frequency Accuracy
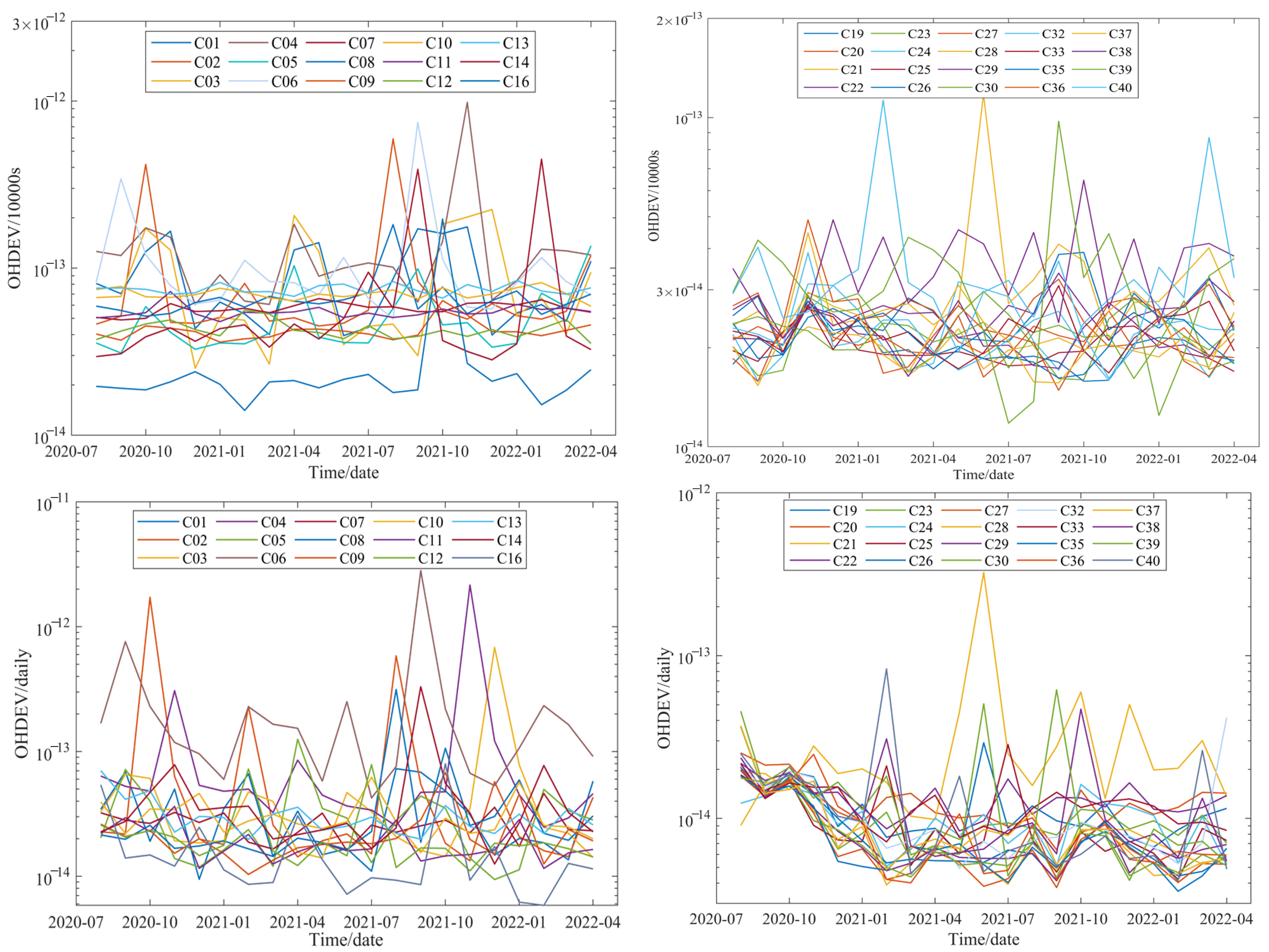
4.4. Frequency Stability
5. Summary Analysis
- (1)
- Data quality. The MAD-based method is effective in processing a large number of satellite atomic clock offset data. The error rate of the original data of satellites launched by BDS-2 in the early stage was unacceptable, which reflects that the operating life would be exhausted. Similarly, the data efficiency of satellite clocks launched in the later stage was low, which was caused by the commissioning phase and would be improved when entering the stable operation stage.
- (2)
- Fitting residuals and periodic characteristics. The daily fitting residual of the BDS-2 satellite clock is within the range of 0.25–0.6 ns, while that of BDS-3 is in the range of 0.1–0.2 ns. The daily fitting residual is processed by FFT, and the main period terms of the satellite atomic clock obtained are close to 1 time or 1/2 of its orbital period. Specifically, 24 h and 12 h for Geo and IGSO and 12.92 h and 6.46 h for MEO, where the main period term of the orbital period is related to the influence of diurnal variation and solar light pressure, or it is related to the periodic change of the distance between the satellite and the earth during the elliptical orbit of the satellite (one circle around the earth must undergo two semi major axis and semi minor axis changes). In addition, the fitting residuals of the atomic clocks of GEO and IGSO satellites show a periodic variation law of about half a year, which may be related to the earth’s revolution.
- (3)
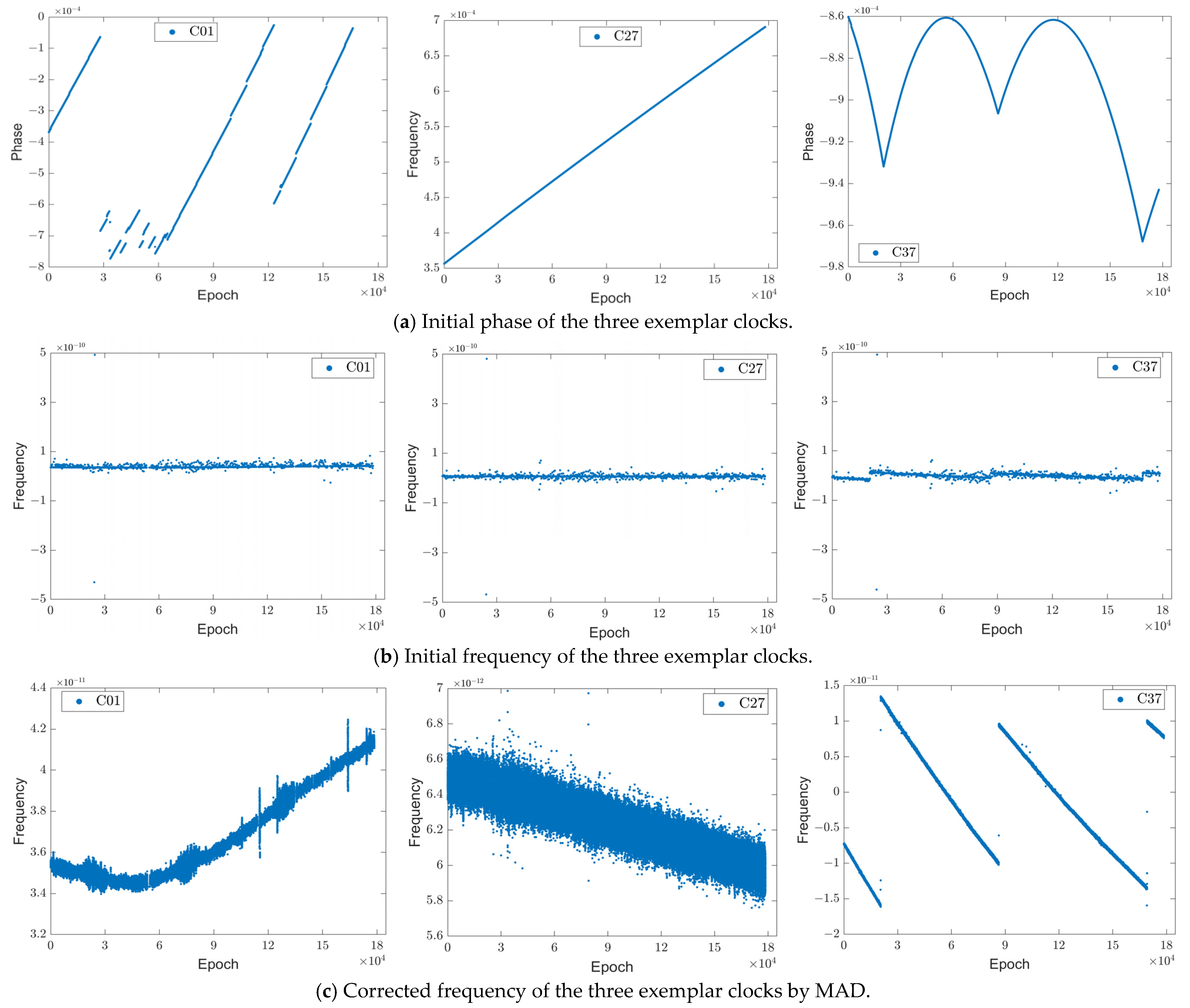
- Frequency drift rate. The early BDS-2 satellite atomic clock has a large drift rate due to long service life, with more frequency modulation points and phase modulation points. The drift rate of RAFS launched at the later stage is at the same level as that of BDS-3, and the drift rate of PHM is optimal, whose phase change tends to be linear over the whole sampling period. In addition, the drift rates of GEO and IGSO showed a significant periodic term variation trend of about half a year, which was similar to the variation characteristics of the fitting residuals.
- (4)
- Frequency accuracy. The frequency accuracy of the BDS-2 atomic clock is at the 10−11 level, while that of BDS-3 is at the 10−12 level. The PHM has better continuity and a smaller fluctuation range. The change of frequency accuracy within the sampling time tends to be linear, and is superior to that of RAFS.
- (5)
- Frequency stability. The stability of the BDS-2 satellite clock is half an order of magnitude inferior to that of BDS-3. In particular, the five satellites C01–C05, which have been in service for a long time, not only have a low overall frequency stability, but also have greater fluctuations than other satellite clocks. Among the three satellites with different orbits, MEO has the optimal frequency stability, followed by IGSO, whilst GEO has the worst performance. The average daily frequency stability of BDS-3 satellite atomic clocks was 1.19 × 10−14 over the whole test period, and increasing to 3~8 × 10−15 with the stable operation of the system.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xu, X.; Li, M.; Li, W.; Liu, J. Performance Analysis of Beidou-2/Beidou-3e Combined Solution with Emphasis on Precise Orbit Determination and Precise Point Positioning. Sensors 2018, 18, 135. [Google Scholar] [CrossRef] [PubMed]
- Wang, M.; Wang, J.; Dong, D.; Meng, L.; Chen, J.; Wang, A.; Cui, H. Performance of BDS-3: Satellite visibility and dilution of precision. GPS Solut. 2019, 23, 2. [Google Scholar] [CrossRef]
- Lv, Y.; Geng, T.; Zhao, Q.; Liu, J. Characteristics of BeiDou experimental satellite clocks. Remote Sens. 2018, 10, 1847. [Google Scholar] [CrossRef]
- Jaduszliwer, B.; Camparo, J. Past, present and future of atomic clocks for GNSS. GPS Solut. 2021, 25, 27. [Google Scholar] [CrossRef]
- Huang, G.; Yu, H.; Guo, H.; Zhang, J.; Fu, W.; Tian, J. Analysis of the Mid-long Term Characterization for BDS On-orbit Satellite Clocks (in Chinese). Geomat. Inf. Sci. Wuhan Univ. 2017, 42, 982–988. [Google Scholar]
- China’s BeiDou Navigation Satellite System. (GEO/IGSO/MEO). Available online: http://www.BeiDou.gov.cn/xt/gfxz/201712/P020171221333863515306.pdf (accessed on 2 August 2022).
- Zha, J.; Zhang, B.; Liu, T.; Hou, P. Ionosphere-weighted undifferenced and uncombined PPP-RTK: Theoretical models and experimental results. GPS Solut. 2021, 25, 135. [Google Scholar] [CrossRef]
- Zhang, B.; Chen, Y.; Yuan, Y. PPP-RTK based on undifferenced and uncombined observations: Theoretical and practical aspects. J. Geod. 2019, 93, 1011–1024. [Google Scholar] [CrossRef]
- Zhang, B.; Teunissen, P.J.G. Characterization of multi-GNSS between-receiver differential code biases using zero and short baselines. Sci. Bull. 2015, 60, 1840–1849. [Google Scholar] [CrossRef]
- Steigenberger, P.; Montenbruck, O. Galileo status: Orbits, clocks, and positioning. GPS Solut. 2017, 21, 319–331. [Google Scholar] [CrossRef]
- Xie, W.; Huang, G.; Wang, L.; Li, P.; Cui, B.; Wang, H.; Cao, Y. Long-term performance detection and evaluation of GLONASS onboard satellite clocks. Measurement 2021, 175, 109091. [Google Scholar] [CrossRef]
- Zaminpardaz, S.; Teunissen, P. Analysis of Galileo IOV + FOC signals and E5 RTK performance. GPS Solut. 2017, 21, 1855–1870. [Google Scholar] [CrossRef]
- Waller, P.; Gonzalez, F.; Binda, S.; Sesia, I.; Hidalgo, I.; Tobias, G.; Tavellaet, P. The In-Orbit performances of GIOVE clocks. IEEE Trans. Ultras. Ferro. Freq. Cont. 2010, 57, 738–745. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Wang, Y.; Yu, C.; Xu, F.; Dou, X. Spaceborne atomic clock performance review of BDS-3 MEO satellites. Measurement 2021, 175, 109075. [Google Scholar] [CrossRef]
- Hauschild, A.; Montenbruck, O.; Sleewaegen, J.; Huisman, L.; Teunissen, P. Characterization of Compass M-1 signals. GPS Solut. 2011, 16, 117–126. [Google Scholar] [CrossRef]
- Wang, B.; Lou, Y.; Liu, J.; Zhao, Q.; Su, X. Analysis of BDS satellite clocks in orbit. GPS Solut. 2016, 20, 783–794. [Google Scholar] [CrossRef]
- Xie, X.; Geng, T.; Zhao, Q.; Liu, J.; Wang, B. Performance of BDS-3: Measurement Quality Analysis, Precise Orbit and Clock Determination. Sensors 2017, 17, 1233. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Q.; Wang, C.; Guo, J.; Wang, B.; Liu, J. Precise orbit and clock determination for BeiDou-3 experimental satellites with yaw attitude analysis. GPS Solut. 2017, 22, 367. [Google Scholar] [CrossRef]
- Wu, Z.; Zhou, S.; Hu, X.; Liu, L.; Shuai, T. Performance of the BDS3 experimental satellite passive hydrogen maser. GPS Solut. 2018, 22, 647. [Google Scholar] [CrossRef]
- Yan, X.; Huang, G.; Zhang, Q.; Liu, C.; Wang, L.; Qin, Z. Early analysis of precise orbit and clock offset determination for the satellites of the global BeiDou-3 system. Adv. Space Res. 2019, 63, 1270–1279. [Google Scholar] [CrossRef]
- Xu, X.; Wang, X.; Liu, J.; Zhao, Q. Characteristics of BD3 Global Service Satellites: POD, Open Service Signal and Atomic Clock Performance. Remote Sens. 2019, 11, 1559. [Google Scholar] [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Prange, L.; Deng, Z.; Zhao, Q.; Perosanz, F.; Romero, I.; Noll, C.; Stuerze, A.; Weber, G. The Multi-GNSS Experiment (MGEX) of the International GNSS Service (IGS)- Achievements, prospects and challenges. Adv. Space Res. 2017, 59, 1671–1697. [Google Scholar] [CrossRef]
- Gu, S.; Mao, F.; Gong, X.; Lou, L.; Xu, X.; Zhou, Y. Evaluation of BDS-2 and BDS-3 Satellite Atomic Clock Products and Their Effects on Positioning. Remote Sens. 2021, 13, 5041. [Google Scholar] [CrossRef]
- Wu, Y.; Yang, B.; Xiao, S.; Wang, M. Atomic Clock Models and Frequency Stability Analyses. Geomat. Inf. Sci. Wuhan Univ. 2019, 44, 1226–1232. [Google Scholar]
- Cao, X.; Kuang, K.; Ge, Y.; Shen, F.; Zhang, S.; Li, J. An efficient method for undifferenced BDS-2/BDS-3 high-rate clock estimation. GPS Solut. 2022, 26, 66. [Google Scholar] [CrossRef]
- Huang, G.; Cui, B.; Xu, Y.; Zhang, Q. Characteristics and Performance Evaluation of Galileo On-orbit Satellites Atomic Clocks during 2014–2017. Adv. Space Res. 2018, 63, 2899–2911. [Google Scholar] [CrossRef]
- Wu, W.; Guo, F.; Zheng, J. Analysis of Galileo signal-in-space range error and positioning performance during 2015–2018. Satell. Navi. 2020, 1, 6. [Google Scholar] [CrossRef]
- Xie, W.; Huang, G.; Cui, B.; Li, P.; Cao, Y.; Wang, H.; Chen, Z.; Shao, B. Characteristics and performance evaluation of QZSS onboard satellite clocks. Sensors 2019, 19, 5147. [Google Scholar] [CrossRef]
- Zhou, R.; Hu, Z.; Zhao, Q.; Li, P.; Wang, W.; He, C.; Cai, C.; Pan, Z. Elevation-dependent pseudorange variation characteristics analysis for the new-generation BeiDou satellite navigation system. GPS Solut. 2018, 22, 60. [Google Scholar] [CrossRef]
- Qin, W.; Ge, Y.; Wei, P.; Dai, P.; Yang, X. Assessment of the BDS-3 on-board clocks and their impact on the PPP time transfer performance. Measurement 2020, 153, 107356. [Google Scholar] [CrossRef]
- Huang, C.; Cui, B.; Zhang, Q.; Li, P. Switching and Performance Variations of On-Orbit BDS Satellite Clocks. Adv. Space Res. 2018, 10, 47. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System | Orbit | PRN | Clock Types | Launch Date | Time (Day) |
|---|---|---|---|---|---|
| BDS-2 | GEO | C01 | RAFS | 17 May 2019 | 1030 |
| C02 | RAFS | 25 October 2012 | 3425 | ||
| C03 | RAFS | 12 June 2016 | 2099 | ||
| C04 | RAFS | 31 October 2010 | 4150 | ||
| C05 | RAFS | 24 February 2012 | 3669 | ||
| IGSO | C06 | RAFS | 31 July 2010 | 4242 | |
| C07 | RAFS | 17 December 2010 | 4103 | ||
| C08 | RAFS | 9 April 2011 | 3990 | ||
| C09 | RAFS | 26 July 2011 | 3882 | ||
| C10 | RAFS | 1 December 2011 | 3754 | ||
| C13 | RAFS | 29 March 2016 | 2174 | ||
| C16 | RAFS | 10 July 2018 | 1341 | ||
| MEO | C11 | RAFS | 29 April 2012 | 3604 | |
| C12 | RAFS | 29 April 2012 | 3604 | ||
| C14 | RAFS | 18 September 2012 | 3462 | ||
| BDS-3 | MEO | C19 | RAFS | 5 November 2017 | 1588 |
| C20 | RAFS | 5 November 2017 | 1588 | ||
| C21 | RAFS | 12 February 2018 | 1489 | ||
| C22 | RAFS | 12 February 2018 | 1489 | ||
| C23 | RAFS | 29 July 2018 | 1322 | ||
| C24 | RAFS | 29 July 2018 | 1322 | ||
| C25 | PHM | 24 August 2018 | 1296 | ||
| C26 | PHM | 24 August 2018 | 1296 | ||
| C27 | PHM | 11 January 2018 | 1521 | ||
| C28 | PHM | 11 January 2018 | 1521 | ||
| C29 | PHM | 29 March 2018 | 1444 | ||
| C30 | PHM | 29 March 2018 | 1444 | ||
| C32 | RAFS | 19 September 2018 | 1270 | ||
| C33 | RAFS | 19 September 2018 | 1270 | ||
| C34 | PHM | 15 October 2018 | 1244 | ||
| C35 | PHM | 15 October 2018 | 1244 | ||
| C36 | RAFS | 18 November 2018 | 1210 | ||
| C37 | RAFS | 18 November 2018 | 1210 | ||
| C41 | PHM | 16 December 2019 | 817 | ||
| C42 | PHM | 16 December 2019 | 817 | ||
| C43 | PHM | 23 November 2019 | 840 | ||
| C44 | PHM | 23 November 2019 | 840 | ||
| C45 | RAFS | 22 September 2019 | 902 | ||
| C46 | RAFS | 22 September 2019 | 902 | ||
| IGSO | C38 | PHM | 20 April 2019 | 1057 | |
| C39 | PHM | 24 June 2019 | 992 | ||
| C40 | PHM | 4 November 2019 | 859 | ||
| GEO | C59 | PHM | 1 November 2018 | 1227 | |
| C60 | PHM | 9 March 2020 | 733 | ||
| C61 | PHM | 23 June 2020 | 627 |
| System | PRN | Drift Rate | Daily Drift | Accuracy | Stability | Daily Stability | Residuals (ns) | Cycle 1 (h) | Cycle 2 (h) | Cycle 3 (h) |
|---|---|---|---|---|---|---|---|---|---|---|
| BDS-2 | C01 | 2.46 | 17.62 | 3.69 | 9.07 | 3.42 | 0.47 | 12.08 | 24.00 | 8.02 |
| C02 | 9.70 | 81.78 | 3.11 | 10.03 | 14.40 | 0.37 | 24.07 | 12.02 | 8.01 | |
| C03 | 3.56 | 150.29 | 4.79 | 9.22 | 6.29 | 0.45 | 24.02 | 12.07 | 8.03 | |
| C04 | 18.12 | 251.26 | 16.58 | 14.96 | 16.20 | 0.59 | 24.00 | 12.00 | 8.00 | |
| C05 | 4.49 | 148.90 | 4.83 | 5.28 | 3.17 | 0.33 | 24.00 | 12.00 | 6.00 | |
| C06 | 10.03 | 86.12 | 4.39 | 12.61 | 29.30 | 0.47 | 24.00 | 12.00 | 8.00 | |
| C07 | 10.30 | 99.39 | 3.97 | 5.75 | 2.64 | 0.56 | 24.00 | 12.00 | 8.00 | |
| C08 | 2.11 | 103.99 | 2.57 | 6.79 | 4.07 | 0.41 | 24.00 | 12.00 | 6.00 | |
| C09 | 1.34 | 9.99 | 2.82 | 4.25 | 2.23 | 0.34 | 24.00 | 12.00 | 8.00 | |
| C10 | 2.48 | 18.08 | 0.58 | 7.05 | 3.06 | 0.53 | 24.00 | 12.00 | 6.00 | |
| C11 | 0.85 | 7.37 | 2.34 | 5.49 | 1.89 | 0.35 | 27.94 | 12.92 | 6.46 | |
| C12 | 1.17 | 9.66 | 1.64 | 4.29 | 2.27 | 0.27 | 12.92 | 28.34 | 6.46 | |
| C13 | 1.49 | 11.54 | 1.53 | 7.47 | 3.09 | 0.54 | 24.00 | 12.00 | 6.00 | |
| C14 | 2.19 | 17.64 | 6.24 | 7.77 | 4.78 | 0.25 | 12.92 | 6.46 | 28.34 | |
| C16 | 1.06 | 9.19 | 1.47 | 2.88 | 1.76 | 0.26 | 24.00 | 12.00 | 8.00 | |
| Mean | 4.76 | 68.19 | 4.04 | 7.53 | 6.57 | 0.41 | - | - | - | |
| BDS-3 | C19 | 0.66 | 5.91 | 1.17 | 2.59 | 1.18 | 0.16 | 12.92 | 6.46 | 4.27 |
| C20 | 1.11 | 10.05 | 0.84 | 2.48 | 1.31 | 0.17 | 12.92 | 6.46 | 4.29 | |
| C21 | 1.11 | 11.41 | 1.27 | 3.33 | 3.82 | 0.21 | 12.92 | 6.46 | 4.29 | |
| C22 | 0.85 | 10.55 | 0.73 | 2.59 | 1.35 | 0.19 | 12.92 | 6.46 | 4.29 | |
| C23 | 1.12 | 10.30 | 0.68 | 2.25 | 1.14 | 0.13 | 6.46 | 12.92 | 4.30 | |
| C24 | 0.72 | 6.28 | 0.85 | 2.37 | 0.99 | 0.14 | 12.92 | 6.46 | 4.30 | |
| C25 | 0.48 | 4.41 | 0.95 | 2.01 | 1.00 | 0.12 | 6.46 | 12.92 | 12.02 | |
| C26 | 0.27 | 2.76 | 0.90 | 2.01 | 0.81 | 0.11 | 12.92 | 6.46 | 12.02 | |
| C27 | 0.30 | 3.00 | 0.62 | 2.13 | 0.73 | 0.12 | 6.46 | 12.92 | 4.30 | |
| C28 | 0.26 | 2.33 | 0.46 | 2.04 | 0.75 | 0.13 | 6.46 | 12.92 | 4.30 | |
| C29 | 0.26 | 2.37 | 0.52 | 2.18 | 0.80 | 0.13 | 6.46 | 12.92 | 4.30 | |
| C30 | 0.29 | 3.11 | 0.35 | 2.16 | 1.07 | 0.13 | 6.46 | 12.92 | 4.30 | |
| C32 | 1.03 | 8.74 | 0.51 | 2.24 | 1.10 | 0.14 | 6.46 | 12.92 | 4.30 | |
| C33 | 1.09 | 9.41 | 0.74 | 2.22 | 1.20 | 0.15 | 12.92 | 6.46 | 28.34 | |
| C35 | 0.27 | 2.54 | 1.78 | 2.12 | 0.76 | 0.14 | 12.92 | 6.46 | 28.34 | |
| C36 | 0.63 | 5.45 | 1.04 | 2.30 | 0.91 | 0.12 | 6.46 | 12.92 | 4.30 | |
| C37 | 0.92 | 8.02 | 0.78 | 2.22 | 0.99 | 0.12 | 6.46 | 4.30 | 12.92 | |
| C38 | 0.80 | 7.45 | 0.25 | 3.58 | 1.30 | 0.26 | 8.00 | 24.00 | 12.00 | |
| C39 | 0.54 | 5.75 | 0.04 | 3.27 | 1.24 | 0.25 | 24.00 | 12.00 | 8.00 | |
| C40 | 1.48 | 11.93 | 2.82 | 3.53 | 1.39 | 0.30 | 24.00 | 8.00 | 12.00 | |
| Mean | 0.71 | 6.59 | 0.86 | 2.48 | 1.19 | 0.16 | - | - | - | |
| All | Mean | 2.73 | 37.39 | 2.22 | 4.64 | 3.50 | 0.27 | - | - | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, Y.; Xu, J.; Wu, M.; Li, F. Analysis of the Long-Term Characteristics of BDS On-Orbit Satellite Atomic Clock: Since BDS-3 Was Officially Commissioned. Remote Sens. 2022, 14, 4535. https://doi.org/10.3390/rs14184535
Liang Y, Xu J, Wu M, Li F. Analysis of the Long-Term Characteristics of BDS On-Orbit Satellite Atomic Clock: Since BDS-3 Was Officially Commissioned. Remote Sensing. 2022; 14(18):4535. https://doi.org/10.3390/rs14184535
Chicago/Turabian StyleLiang, Yifeng, Jiangning Xu, Miao Wu, and Fangneng Li. 2022. "Analysis of the Long-Term Characteristics of BDS On-Orbit Satellite Atomic Clock: Since BDS-3 Was Officially Commissioned" Remote Sensing 14, no. 18: 4535. https://doi.org/10.3390/rs14184535