1. Introduction
High-frequency surface-wave radar (HFSWR) plays an important role in marine surveillance and vessel target detection due to its capability for all-weather and large-scale, over-the-horizon monitoring [
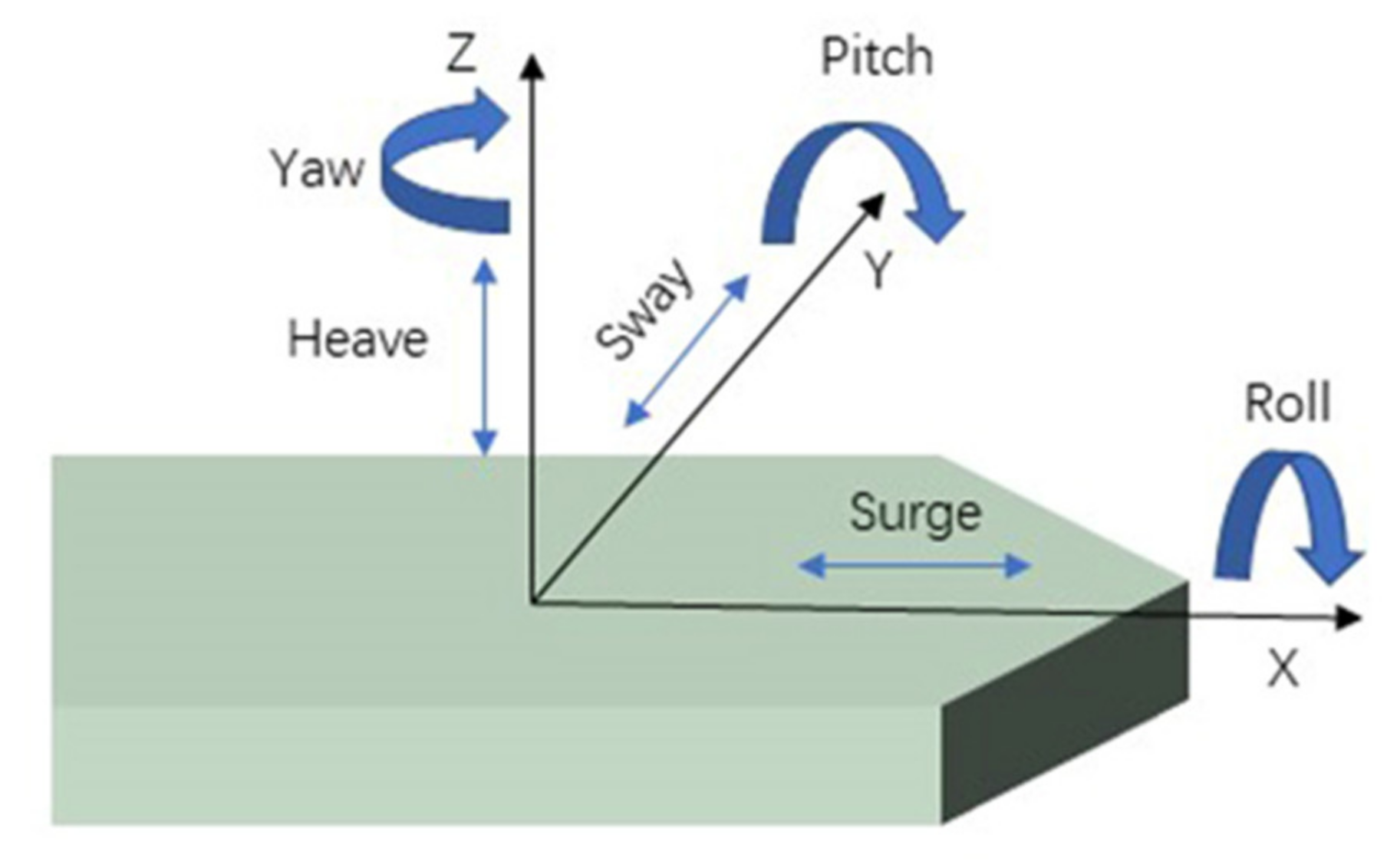
1]. In comparison with land-based HFSWRs, shipborne HFSWRs offer greater flexibility and a wider detection range. However, the motion of the platform, including six-degree-of-freedom (6-DOF) motion and forward motion, leads to the spread of ship targets and a corresponding broadening of sea clutter in the range-Doppler (RD) spectrum [
2], making target detection very difficult.
Walsh et al. [
3,
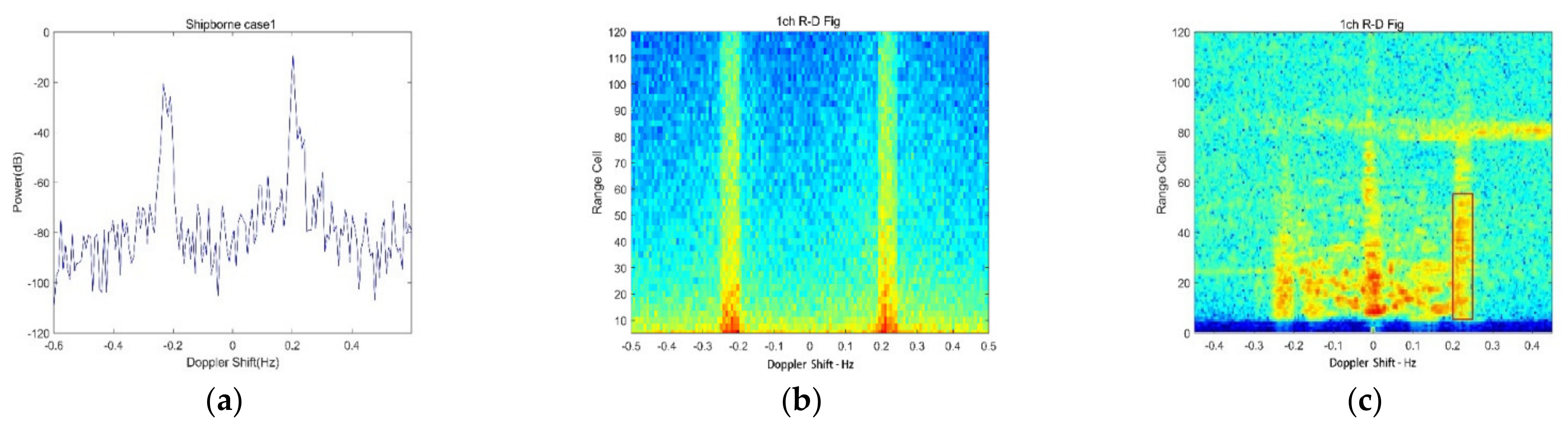
4] derived the first- and second-order HFSWR sea surface scattering cross-sectional areas for an antenna mounted on a floating platform under the influence of a wobbling motion. In their simulations, they showed that additional peaks appear in the Doppler spectrum when the antenna is subjected to wobble. Later, Ma et al. [
5] analyzed the first- and second-order sea surface scattering cross-sectional areas of HFSWR under the influence of pitch and roll movements of a floating platform and found that the motion-induced peaks appeared symmetrically in the Doppler frequencies. Meanwhile, Yao et al. [
6] derived the sea surface scattering cross-sectional area for first- and second-order HFSWR on the basis of a 6-DOF oscillatory motion model. The results showed that 6-DOF oscillatory motions can generate additional symmetrically distributed peaks in the radar spectrum. The location and intensity of these peaks depends on the angular frequency and amplitude of each one-dimensional oscillatory motion. Simulation results in [
6] have also shown that the Doppler spectrum expands due to the forward movement of the ship, which is detrimental to target detection. Gill et al. [
7] proposed a method based on ocean backscatter for mitigating the effect of antenna motion in the Doppler spectrum of high-frequency radars. Zhang et al. [
8] modeled the spatio-temporal distribution of sea echoes from a shipborne radar platform under variable speed and analyzed the relationship between platform velocity and sea clutter propagation. However, the focus of these studies was solving the sea clutter propagation problem, not the target detection problem. In 2021, Yang et al. [
9] determined the effects of platform motion and sea current on target echo by modeling and analyzing the effects of platform 6-DOF, forward movement, and sea current on echo delay, and verified the validity of the model through simulation experiments and actual measurement.
Time-frequency (TF) analysis methods in HFSWR target detection have major advantages over traditional CFAR detection and peak detection in terms of accuracy and false-alarm rate. Classical linear methods, such as the short-time Fourier transform (STFT) and wavelet transform (WT) [
10], can extend one-dimensional time-series signals to the two-dimensional TF plane, but the TF representations generated by traditional analysis methods are usually ambiguous due to the limitations of Heisenberg’s inaccuracy measurement principle. To overcome the drawbacks of traditional methods, in 2016, Huang et al. [
11] proposed the synchrosqueezing transform (SST) based on the STFT and WT for signal redistribution and synchronous compression. Simulations have shown that the synchronous compression transform can improve the resolution of the TF representation, but for linear frequency modulation signals the SST method cannot produce a focused TF representation. Therefore, in 2019 Yu et al. [
12] proposed a multisynchrosqueezing transform (MSST) TF analysis method based on the SST, and the simulation showed that although the TF representation was still sufficient in energy after several iterations, it remained limited for more complex cases. Inspired by the SST, in 2017 Yu et al. [
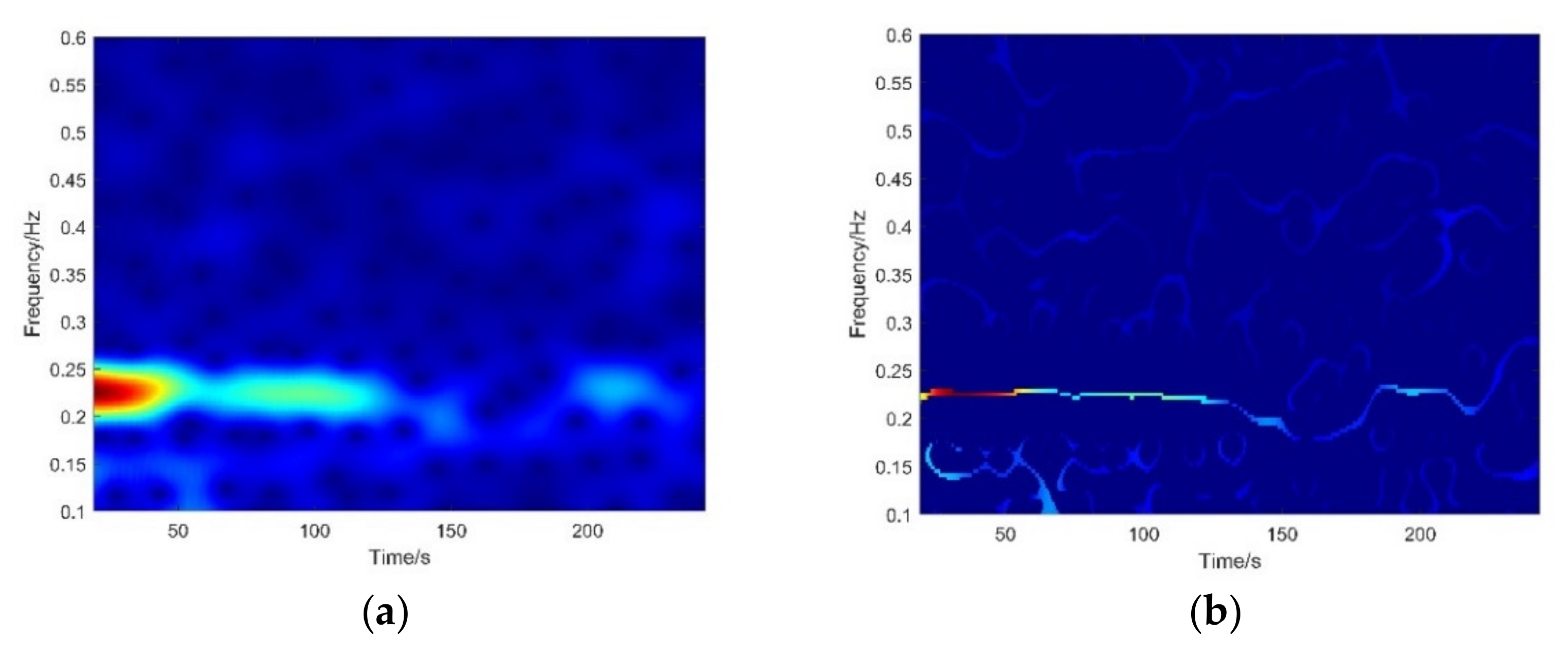
13] proposed a TF analysis method based on the STFT post-processing technique, the synchroextracting transform (SET), which compresses all TF coefficients into the instantaneous frequency (IF) trajectory. Unlike the SST compression, the main idea of SET is to retain only the TF information of the STFT results that are most relevant to the time-varying features of the signal, and to remove most of the smeared TF energy, greatly increasing the energy concentration of the new TF representation. In 2021, Cai et al. [
14] applied the SET method to the azimuth detection of HFSWR and showed through simulation experiments that the method is significantly better than CFAR detection for improving detection efficiency and reducing directional errors, especially in the case of a low signal-to-noise ratio (SNR).
In terms of target detection, in 2017 Li et al. [
15] proposed a TF analysis motion target detection algorithm based on spectral refinement and wavelet-scale rearrangement. The simulation and experimental results showed better detection for vessel targets with small differences in Doppler frequencies and for targets near sea clutter. Chen et al. [
16], also in 2017, proposed a two-dimensional multi-signal classification method based on sparse recovery to improve the target-detection capability of HFSWR. The above methods all detect targets away from sea clutter or near its edges. In 2018, Wang et al. [
17] proposed a method for detecting targets within the sea clutter zone using in situ sea state information, but this was shown through experiments to be useful for target detection only in specific scenarios. In 2021, Wu et al. [
18] proposed an algorithm for target detection under the occlusion of strong clutter and a complex interference environment, which uses a Faster R-CNN network to localize the clutter and interference region and then a two-stage cascade algorithm to detect the region. Experiments have shown that the method has good results for detecting targets obscured by clutter and interference areas, but its performance degrades when detecting targets completely obscured by sea clutter.
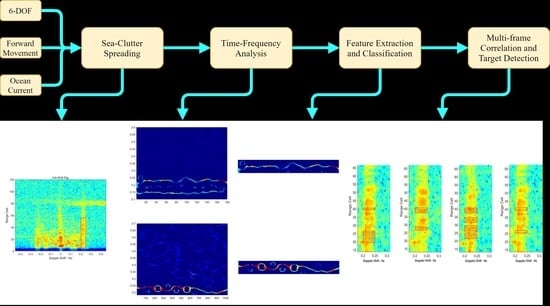
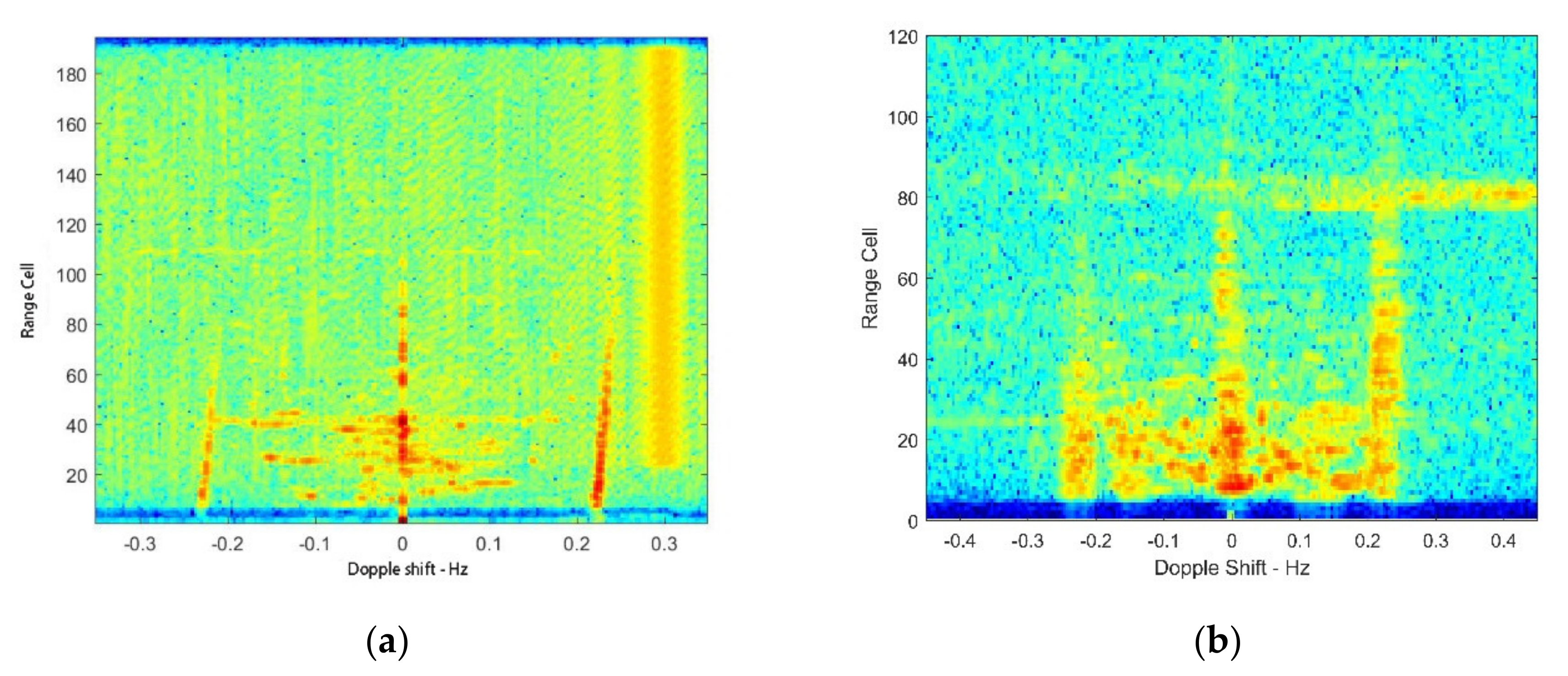
The aim of this paper is to establish a platform-motion model to mathematically analyze the effects of platform motion on echo signals and to focus mainly on the sea clutter spreading in order to locate the target in the sea clutter coverage area for the next step. Both simulations and field experiments verified the validity of this model. One TFI is obtained by using the SET on the clutter region, and a convolutional neural network (CNN) is designed to bifurcate the TFI to obtain the location of the suspected target. Eventually, the exact location of the target is determined by multi-frame correlation.
The structure of this paper is as follows.
Section 1 gives a brief introduction to the existing research results related to this paper. In
Section 2, the differences between shore−based HFSWR and shipborne HFSWR are compared, and the difficulties of shipborne HFSWR in the target side are pointed out. At the same time, the process framework of this article is given. In
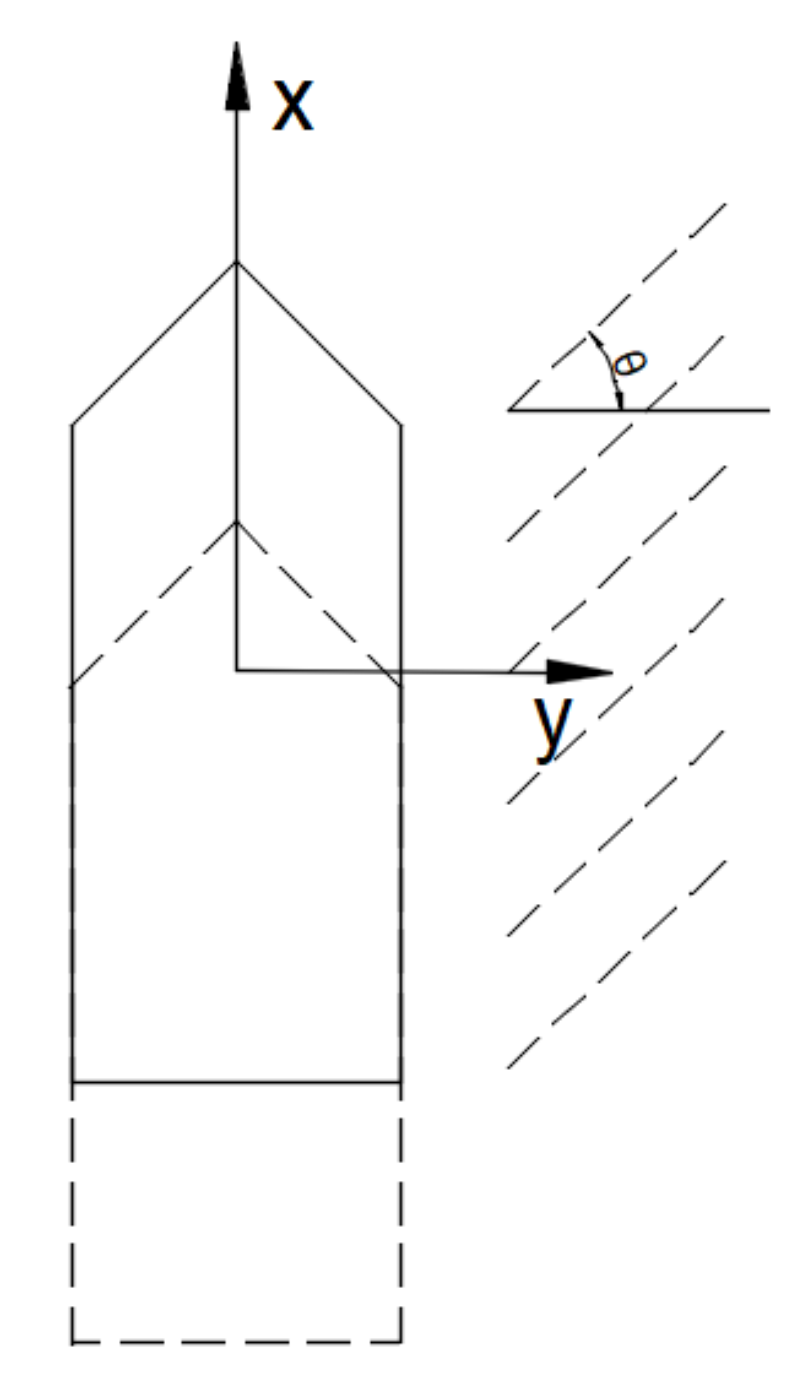
Section 3, we model the frequency direction of the HFSWR on the ship platform, and carry out theoretical analysis and finally obtain the sea clutter widening area. In
Section 4, the time-frequency analysis is carried out according to the sea clutter broadening area determined in the previous section, and the TF map is classified by CNN to obtain the classification results.
Section 5 uses the multi-frame correlation method to remove the false alarm target and the exact position of the real target point. Finally,
Section 6 gives the conclusion.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}