
Global 10 m Land Use Land Cover Datasets: A Comparison of Dynamic World, World Cover and Esri Land Cover

 , , and
, , and
Abstract
:1. Introduction
2. Materials and Methods
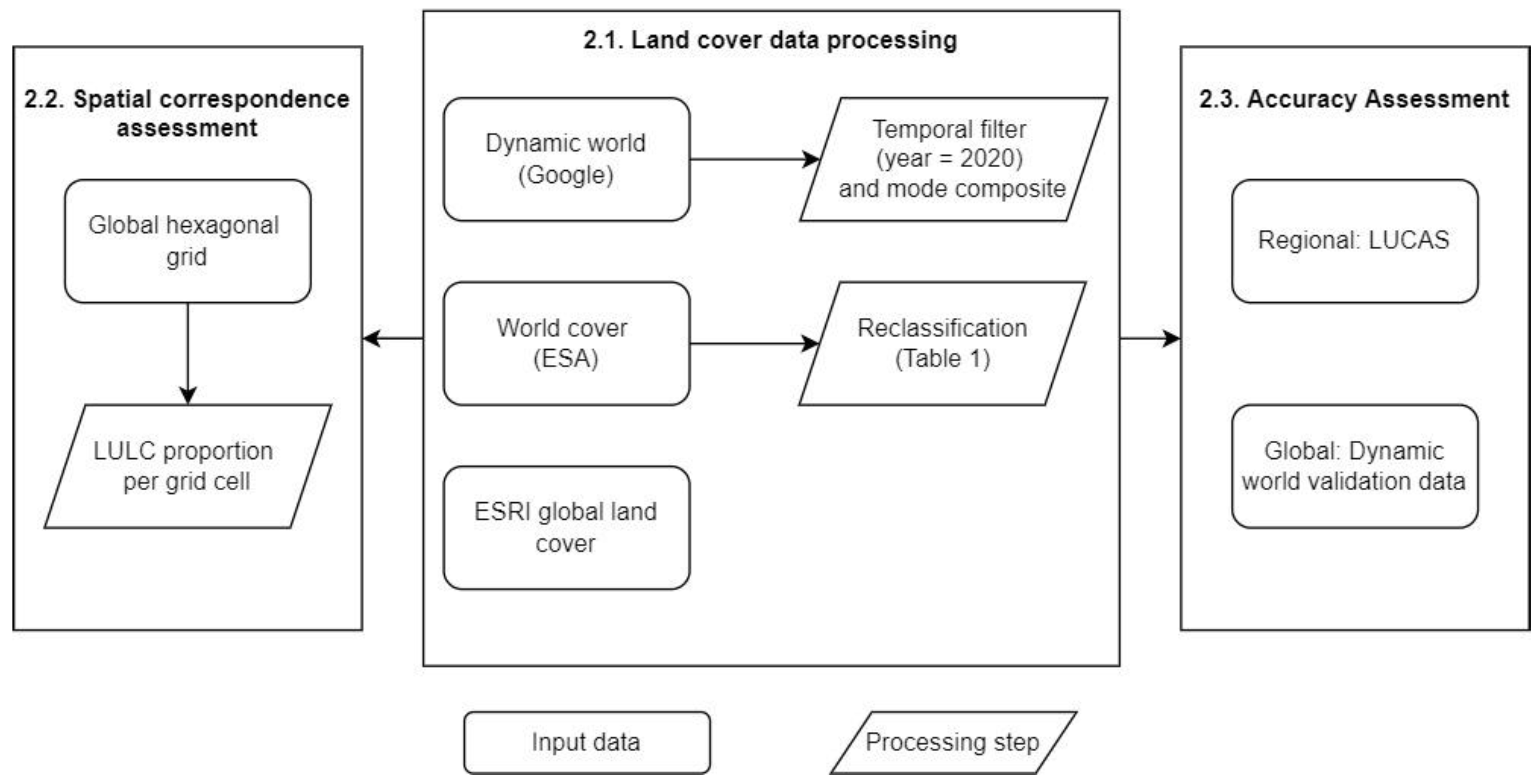
2.1. Land Cover Data Processing
2.2. Spatial Correspondence Assessment
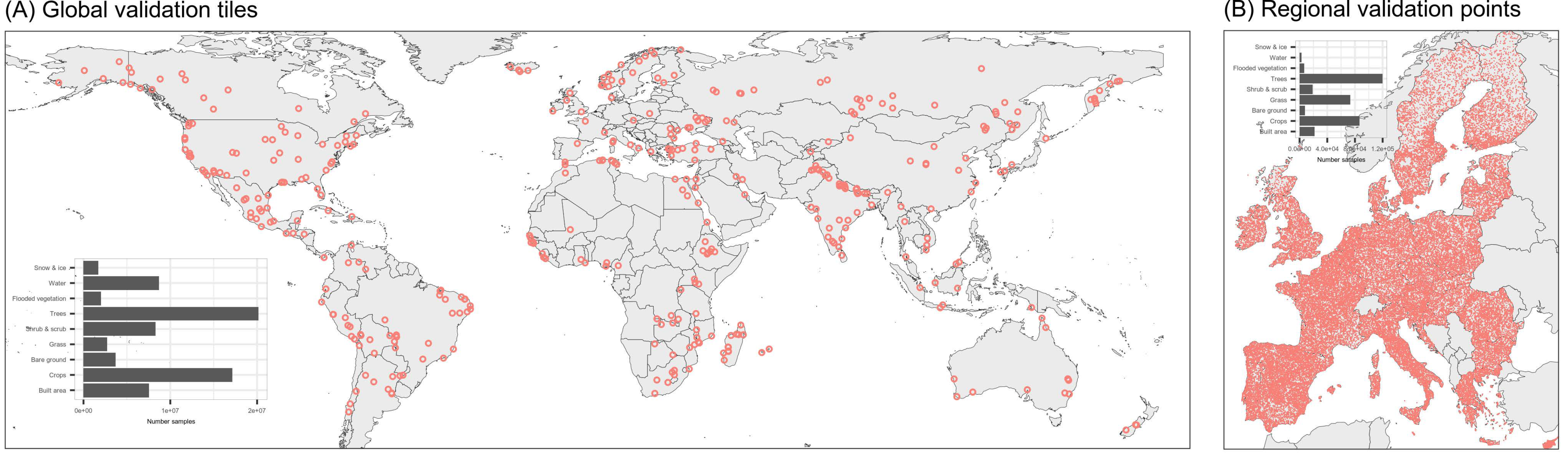
2.3. Accuracy Assessment
2.4. Implementation Details
3. Results
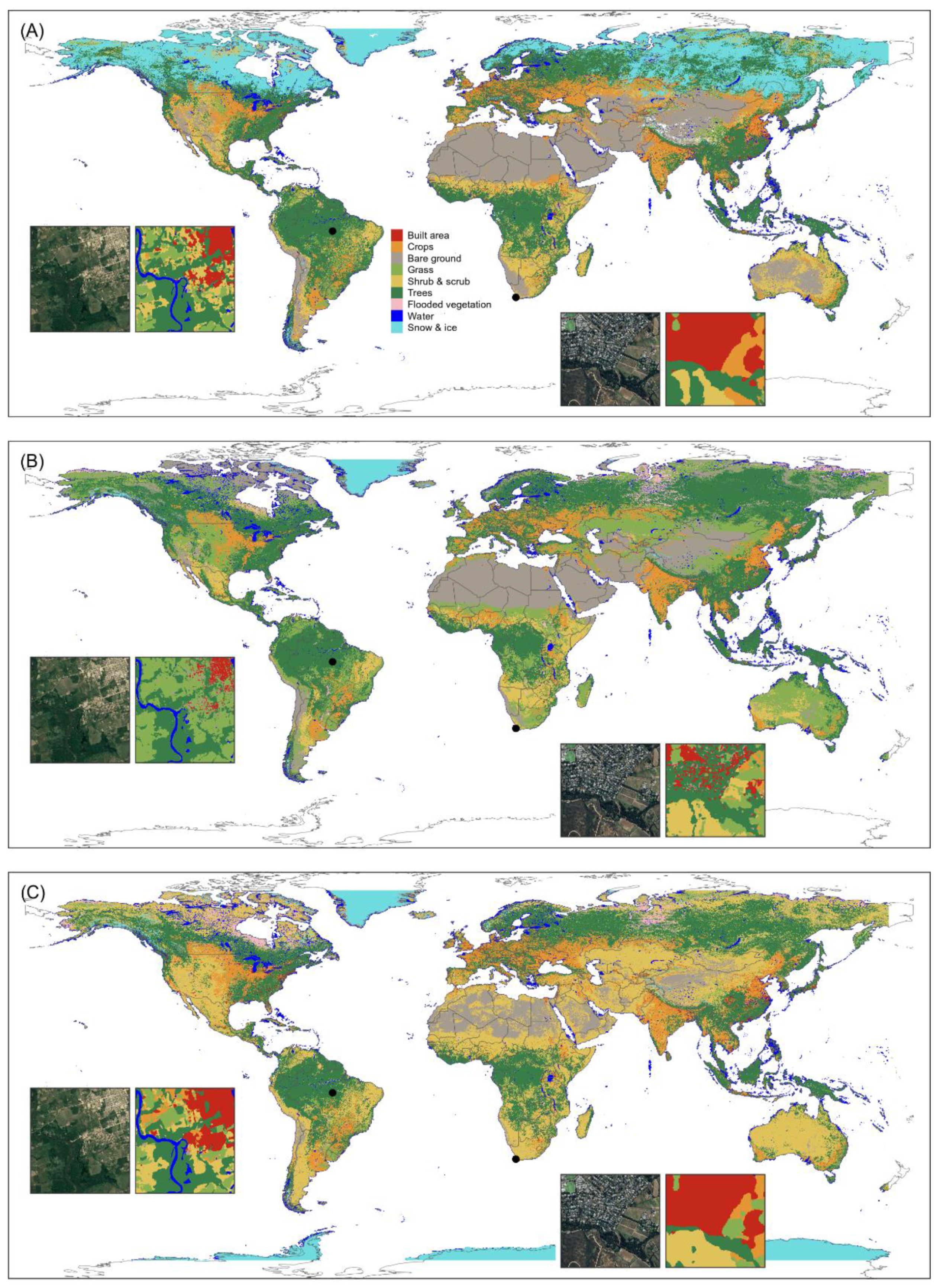
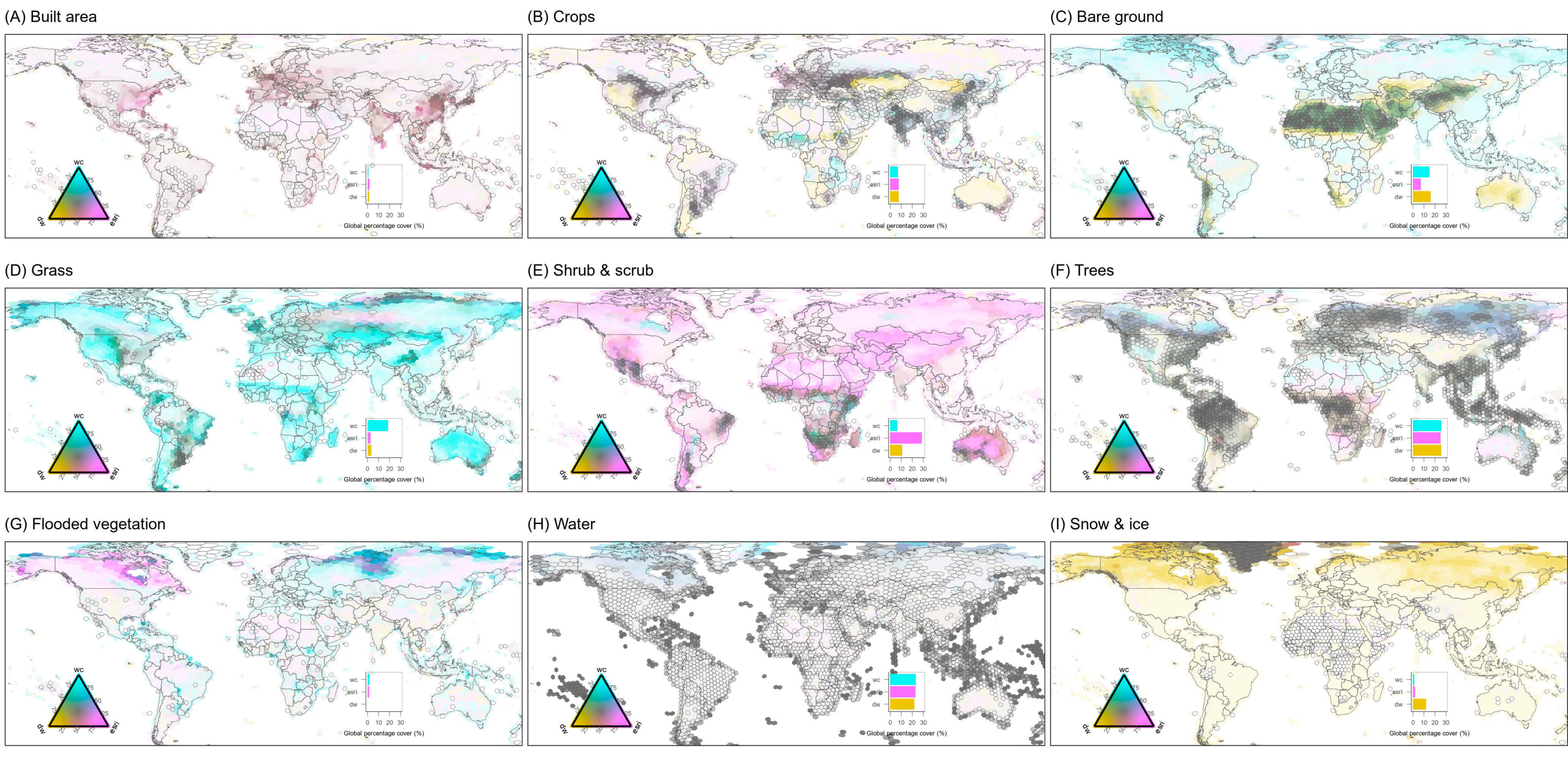
3.1. Spatial Correspondence
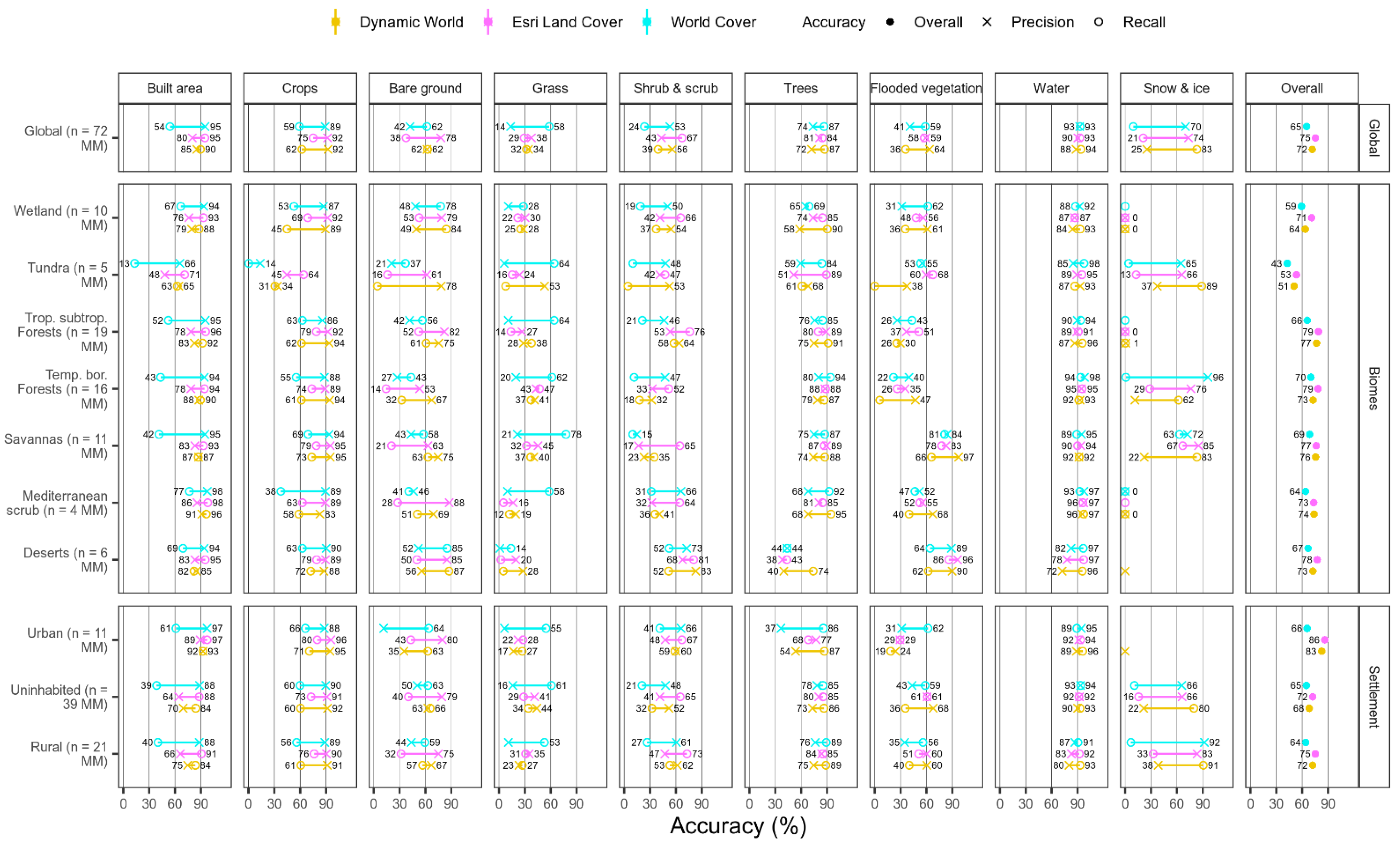
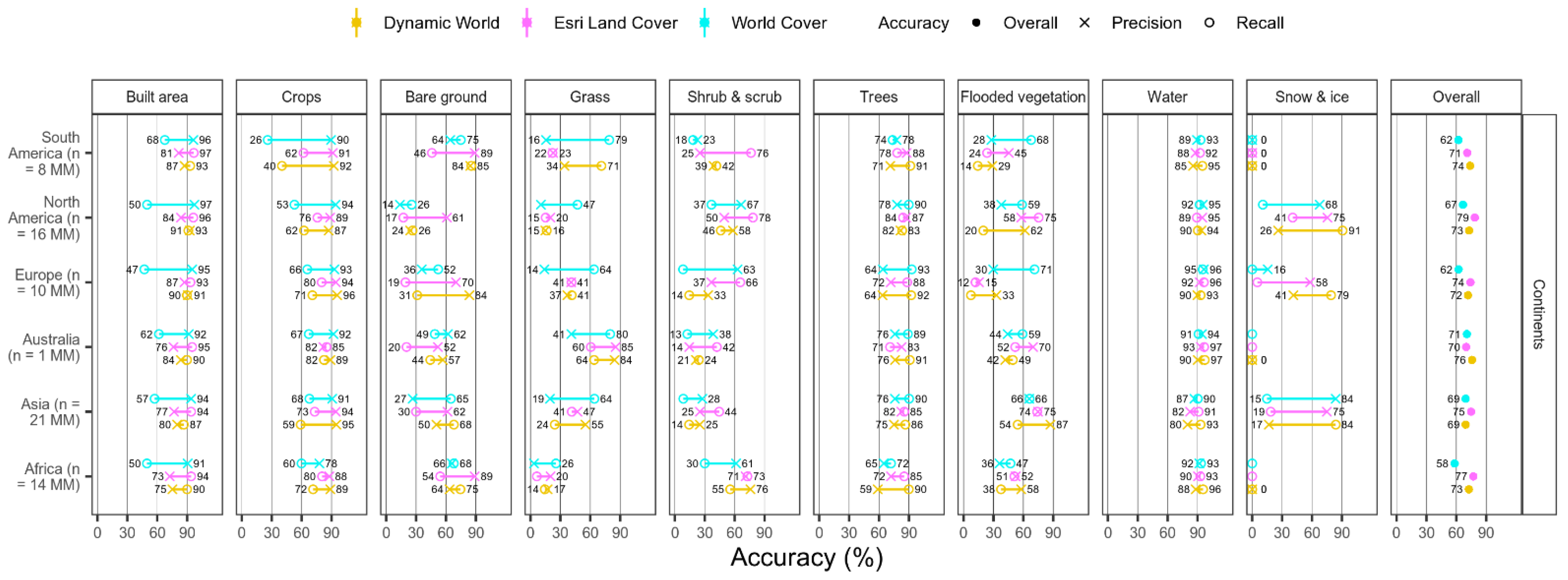
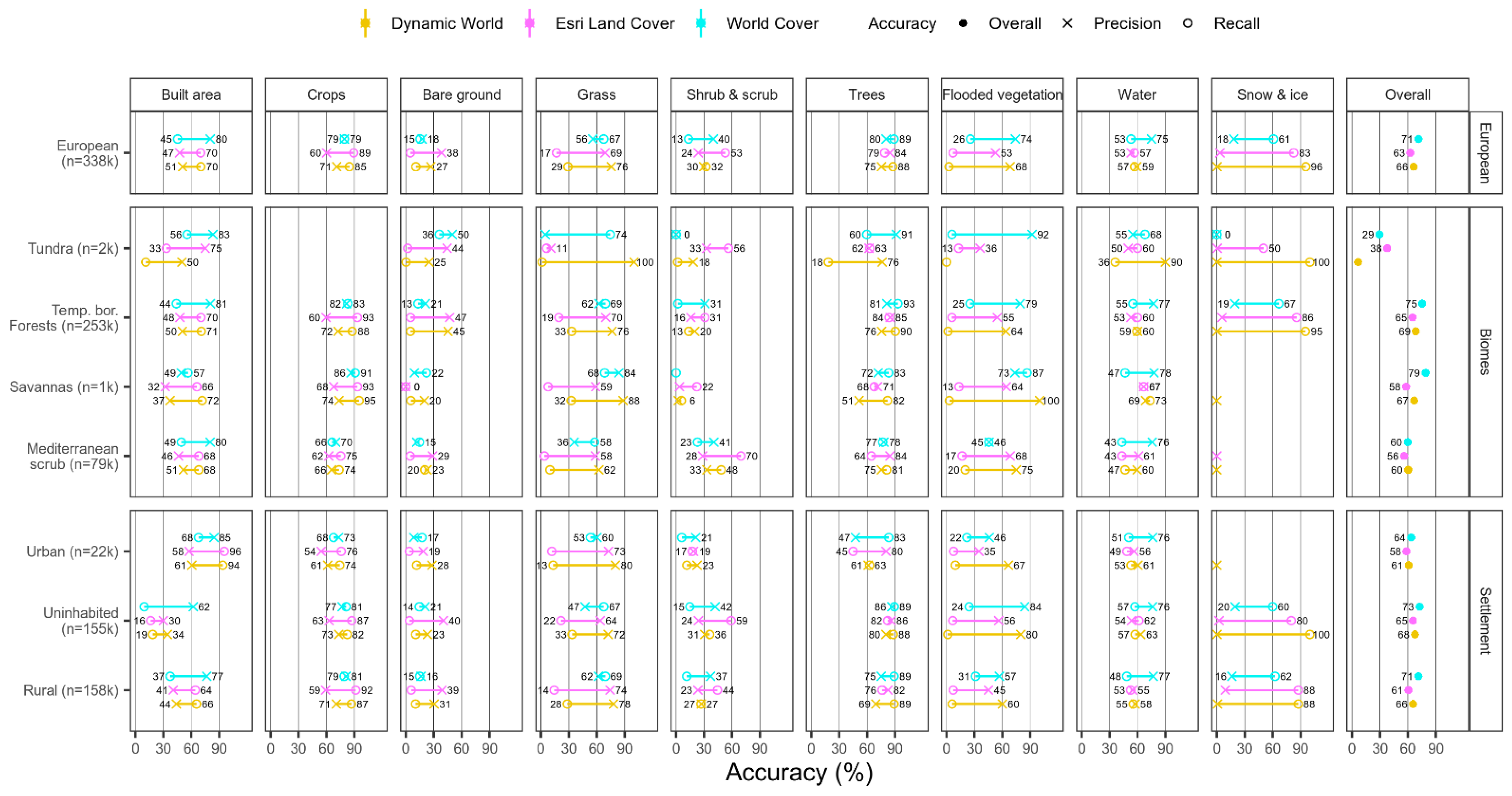
3.2. Accuracy
4. Discussion
4.1. Explaining the Differences between Global LULC Products
4.1.1. Minimum Mapping Unit
4.1.2. Classification Typology
4.1.3. Modeling and Validation Methods
4.2. Recommendations for Users
- Regardless of LULC product, users should implement design-based inference when calculating LULC areas or changes and avoid drawing conclusions from simple ‘pixel-counting’, which leads to biased area estimates [35]. Design-based inference involves generating a post-classification reference (validation or “ground truth”) sample that is implemented with a probability sampling design (e.g., simple random or stratified random), which can be used to quantify unbiased area and accuracy estimates.
- In general, users can rely on water, built area, trees and crops being mapped with the highest accuracy, while shrub and scrub, grass, bare ground and flooded vegetation have the lowest accuracies. With this in mind, it may be beneficial to simplify the LULC typology by merging classes with low accuracies into aggregate classes if your use-case allows it.
- Users should be aware of the biases in global LULC products (reported relative to one another). Specifically, WC is biased toward estimating greater grass cover, Esri towards shrub and scrub cover and DW towards snow and ice.
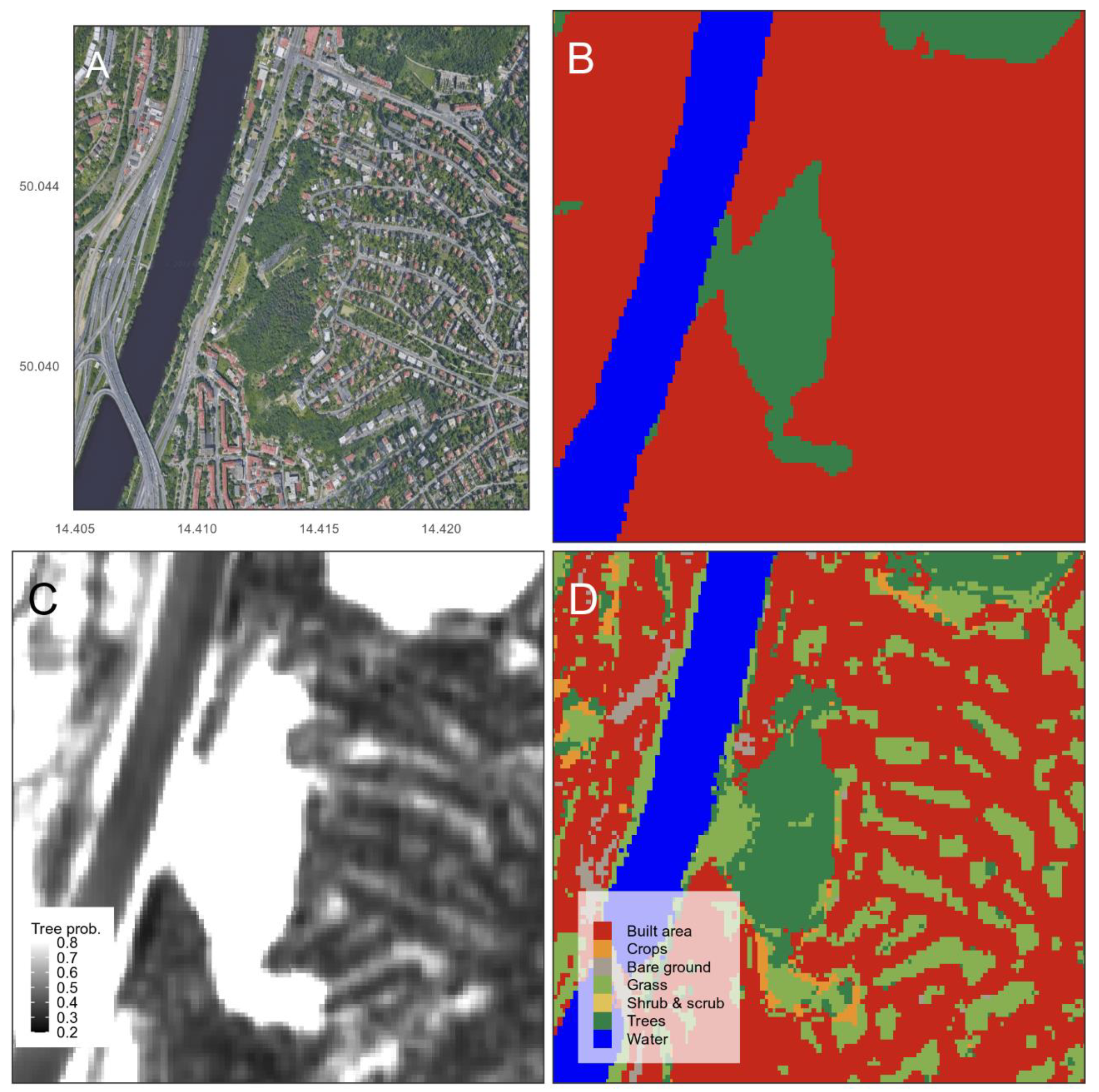
- WC is most appropriate when considering an MMU of <100 m2 or when a user wants to resolve smaller landscape elements. For example, WC is advantageous in urban areas and complex agricultural landscapes with small or thin vegetation structures, such as trees or hedge rows.
- Based on our supplementary analysis of the DW compositing method (Figure S1), we find that the type of temporal aggregation of DW predictions has very little effect on global and regional accuracy. However, we note that changing the seasonal extent of temporal aggregation (e.g., growing-season composite) may have significant effects on accuracy (although we did not test this here).
- The delivery format of DW in near real-time, covering the entire Sentinel-2 image collection and including LULC class-specific probability scores, is qualitatively unique from Esri and WC, which only produce annual LULC maps without probability scores. We encourage users to take advantage of this unique aspect to DW by exploring novel possibilities discussed in the section below.
4.3. Potential for Future Research
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chaves, M.E.D.; Picoli, M.C.A.; Sanches, I.D. Recent Applications of Landsat 8/OLI and Sentinel-2/MSI for Land Use and Land Cover Mapping: A Systematic Review. Remote Sens. 2020, 12, 3062. [Google Scholar] [CrossRef]
- Phiri, D.; Simwanda, M.; Salekin, S.; Nyirenda, V.R.; Murayama, Y.; Ranagalage, M. Sentinel-2 Data for Land Cover/Use Mapping: A Review. Remote Sens. 2020, 12, 2291. [Google Scholar] [CrossRef]
- Liu, L.; Zhang, X.; Gao, Y.; Chen, X.; Shuai, X.; Mi, J. Finer-Resolution Mapping of Global Land Cover: Recent Developments, Consistency Analysis, and Prospects. J. Remote Sens. 2021, 2021, 5289697. [Google Scholar] [CrossRef]
- Kavvada, A.; Metternicht, G.; Kerblat, F.; Mudau, N.; Haldorson, M.; Laldaparsad, S.; Friedl, L.; Held, A.; Chuvieco, E. Towards Delivering on the Sustainable Development Goals Using Earth Observations. Remote Sens. Environ. 2020, 247, 111930. [Google Scholar] [CrossRef]
- Lawrence, P.J.; Chase, T.N. Representing a New MODIS Consistent Land Surface in the Community Land Model (CLM 3.0). J. Geophys. Res. Biogeosci. 2007, 112, G01023. [Google Scholar] [CrossRef]
- Kurkowski, N.P.; Stensrud, D.J.; Baldwin, M.E. Assessment of Implementing Satellite-Derived Land Cover Data in the Eta Model. Weather Forecast. 2003, 18, 404–416. [Google Scholar] [CrossRef] [Green Version]
- Andrew, M.E.; Wulder, M.A.; Nelson, T.A. Potential Contributions of Remote Sensing to Ecosystem Service Assessments. Prog. Phys. Geogr. Earth Environ. 2014, 38, 328–353. [Google Scholar] [CrossRef] [Green Version]
- Martínez-Harms, M.J.; Balvanera, P. Methods for Mapping Ecosystem Service Supply: A Review. Int. J. Biodivers. Sci. Ecosyst. Serv. Manag. 2012, 8, 17–25. [Google Scholar] [CrossRef]
- Chakraborty, T.; Sarangi, C.; Lee, X. Reduction in Human Activity Can Enhance the Urban Heat Island: Insights from the COVID-19 Lockdown. Environ. Res. Lett. 2021, 16, 054060. [Google Scholar] [CrossRef]
- Randin, C.F.; Ashcroft, M.B.; Bolliger, J.; Cavender-Bares, J.; Coops, N.C.; Dullinger, S.; Dirnböck, T.; Eckert, S.; Ellis, E.; Fernández, N.; et al. Monitoring Biodiversity in the Anthropocene Using Remote Sensing in Species Distribution Models. Remote Sens. Environ. 2020, 239, 111626. [Google Scholar] [CrossRef]
- Sydenham, M.A.K.; Venter, Z.S.; Eldegard, K.; Moe, S.R.; Steinert, M.; Staverløkk, A.; Dahle, S.; Skoog, D.I.J.; Hanevik, K.A.; Skrindo, A.; et al. High Resolution Prediction Maps of Solitary Bee Diversity Can Guide Conservation Measures. Landsc. Urban Plan. 2022, 217, 104267. [Google Scholar] [CrossRef]
- Hersperger, A.M.; Grădinaru, S.R.; Pierri Daunt, A.B.; Imhof, C.S.; Fan, P. Landscape Ecological Concepts in Planning: Review of Recent Developments. Landsc. Ecol. 2021, 36, 2329–2345. [Google Scholar] [CrossRef] [PubMed]
- Gao, Y.; Skutsch, M.; Paneque-Gálvez, J.; Ghilardi, A. Remote Sensing of Forest Degradation: A Review. Environ. Res. Lett. 2020, 15, 103001. [Google Scholar] [CrossRef]
- Edens, B.; Maes, J.; Hein, L.; Obst, C.; Siikamaki, J.; Schenau, S.; Javorsek, M.; Chow, J.; Chan, J.Y.; Steurer, A.; et al. Establishing the SEEA Ecosystem Accounting as a Global Standard. Ecosyst. Serv. 2022, 54, 101413. [Google Scholar] [CrossRef]
- Sulla-Menashe, D.; Gray, J.M.; Abercrombie, S.P.; Friedl, M.A. Hierarchical Mapping of Annual Global Land Cover 2001 to Present: The MODIS Collection 6 Land Cover Product. Remote Sens. Environ. 2019, 222, 183–194. [Google Scholar] [CrossRef]
- Buchhorn, M.; Lesiv, M.; Tsendbazar, N.-E.; Herold, M.; Bertels, L.; Smets, B. Copernicus Global Land Cover Layers—Collection 2. Remote Sens. 2020, 12, 1044. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Chen, J.; Liao, A.; Cao, X.; Chen, L.; Chen, X.; He, C.; Han, G.; Peng, S.; Lu, M.; et al. Global Land Cover Mapping at 30 m Resolution: A POK-Based Operational Approach. ISPRS J. Photogramm. Remote Sens. 2015, 103, 7–27. [Google Scholar] [CrossRef] [Green Version]
- Cole, L.J.; Kleijn, D.; Dicks, L.V.; Stout, J.C.; Potts, S.G.; Albrecht, M.; Balzan, M.V.; Bartomeus, I.; Bebeli, P.J.; Bevk, D.; et al. A Critical Analysis of the Potential for EU Common Agricultural Policy Measures to Support Wild Pollinators on Farmland. J. Appl. Ecol. 2020, 57, 681–694. [Google Scholar] [CrossRef]
- Hanssen, F.; Barton, D.; Cimburova, Z. Mapping Urban Tree Canopy Cover Using Airborne Laser Scanning—Applications to Urban Ecosystem Accounting for Oslo; NINA Report: Trondheim, Norway, 2019. [Google Scholar]
- Zhu, Z.; Wulder, M.A.; Roy, D.P.; Woodcock, C.E.; Hansen, M.C.; Radeloff, V.C.; Healey, S.P.; Schaaf, C.; Hostert, P.; Strobl, P. Benefits of the Free and Open Landsat Data Policy. Remote Sens. Environ. 2019, 224, 382–385. [Google Scholar] [CrossRef]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-Scale Geospatial Analysis for Everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Schramm, M.; Pebesma, E.; Milenković, M.; Foresta, L.; Dries, J.; Jacob, A.; Wagner, W.; Mohr, M.; Neteler, M.; Kadunc, M.; et al. The OpenEO API–Harmonising the Use of Earth Observation Cloud Services Using Virtual Data Cube Functionalities. Remote Sens. 2021, 13, 1125. [Google Scholar] [CrossRef]
- Brown, C.F.; Brumby, S.P.; Guzder-Williams, B.; Birch, T.; Hyde, S.B.; Mazzariello, J.; Czerwinski, W.; Pasquarella, V.J.; Haertel, R.; Ilyushchenko, S.; et al. Dynamic World, Near Real-Time Global 10 m Land Use Land Cover Mapping. Sci. Data 2022, 9, 251. [Google Scholar] [CrossRef]
- Zanaga, D.; Van De Kerchove, R.; De Keersmaecker, W.; Souverijns, N.; Brockmann, C.; Quast, R.; Wevers, J.; Grosu, A.; Paccini, A.; Vergnaud, S.; et al. ESA WorldCover 10 m 2020 V100. OpenAIRE 2021. [Google Scholar] [CrossRef]
- Karra, K.; Kontgis, C.; Statman-Weil, Z.; Mazzariello, J.C.; Mathis, M.; Brumby, S.P. Global Land Use/Land Cover with Sentinel 2 and Deep Learning; IEEE: Manhattan, NY, USA, 2021; pp. 4704–4707. [Google Scholar]
- R Core Team. R: A Language and Environment for Statistical Computing 2021. R Foundation for Statistical Computing, Vienna, Austria. Available online: https://www.R-project.org/ (accessed on 21 July 2022).
- D’Andrimont, R.; Yordanov, M.; Martinez-Sanchez, L.; Eiselt, B.; Palmieri, A.; Dominici, P.; Gallego, J.; Reuter, H.I.; Joebges, C.; Lemoine, G.; et al. Harmonised LUCAS In-Situ Land Cover and Use Database for Field Surveys from 2006 to 2018 in the European Union. Sci. Data 2020, 7, 352. [Google Scholar] [CrossRef]
- Dinerstein, E.; Olson, D.; Joshi, A.; Vynne, C.; Burgess, N.D.; Wikramanayake, E.; Hahn, N.; Palminteri, S.; Hedao, P.; Noss, R. An Ecoregion-Based Approach to Protecting Half the Terrestrial Realm. BioScience 2017, 67, 534–545. [Google Scholar] [CrossRef] [PubMed]
- Pesaresi, M.; Freire, S. GHS Settlement Grid Following the REGIO Model 2014 in Application to GHSL Landsat and CIESIN GPW V4-Multitemporal (1975–1990–2000–2015). JRC Data Cat. 2016. Available online: http://data.europa.eu/89h/jrc-ghsl-ghs_smod_pop_globe_r2016a (accessed on 21 July 2022).
- Halvorsen, R.; Skarpaas, O.; Bryn, A.; Bratli, H.; Erikstad, L.; Simensen, T.; Lieungh, E. Towards a Systematics of Ecodiversity: The EcoSyst Framework. Glob. Ecol. Biogeogr. 2020, 29, 1887–1906. [Google Scholar] [CrossRef]
- Büttner, G. CORINE Land Cover and Land Cover Change Products. In Land Use and Land Cover Mapping in Europe; Springer: Berlin/Heidelberg, Germany, 2014; pp. 55–74. [Google Scholar]
- Venter, Z.S.; Sydenham, M.A.K. Continental-Scale Land Cover Mapping at 10 m Resolution Over Europe (ELC10). Remote Sens. 2021, 13, 2301. [Google Scholar] [CrossRef]
- Pflugmacher, D.; Rabe, A.; Peters, M.; Hostert, P. Mapping Pan-European Land Cover Using Landsat Spectral-Temporal Metrics and the European LUCAS Survey. Remote Sens. Environ. 2019, 221, 583–595. [Google Scholar] [CrossRef]
- Büttner, G.; Maucha, G. The Thematic Accuracy of Corine Land Cover 2000. Assessment Using LUCAS (Land Use/Cover Area Frame Statistical Survey). Eur. Environ. Agency Cph. Den. 2006, 7, 1–85. [Google Scholar]
- Olofsson, P.; Foody, G.M.; Herold, M.; Stehman, S.V.; Woodcock, C.E.; Wulder, M.A. Good Practices for Estimating Area and Assessing Accuracy of Land Change. Remote Sens. Environ. 2014, 148, 42–57. [Google Scholar] [CrossRef]
- Stehman, S.V.; Foody, G.M. Key Issues in Rigorous Accuracy Assessment of Land Cover Products. Remote Sens. Environ. 2019, 231, 111199. [Google Scholar] [CrossRef]
- Friedl, M.A.; Woodcock, C.E.; Olofsson, P.; Zhu, Z.; Loveland, T.; Stanimirova, R.; Arevalo, P.; Bullock, E.; Hu, K.-T.; Zhang, Y.; et al. Medium Spatial Resolution Mapping of Global Land Cover and Land Cover Change Across Multiple Decades From Landsat. Front. Remote Sens. 2022, 3, 894571. [Google Scholar] [CrossRef]
- Sales, M.H.; De Bruin, S.; Souza, C.; Herold, M. Land Use and Land Cover Area Estimates from Class Membership Probability of a Random Forest Classification. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–11. [Google Scholar] [CrossRef]
- Khatami, R.; Mountrakis, G.; Stehman, S.V. Predicting Individual Pixel Error in Remote Sensing Soft Classification. Remote Sens. Environ. 2017, 199, 401–414. [Google Scholar] [CrossRef]
- Ebrahimy, H.; Mirbagheri, B.; Matkan, A.A.; Azadbakht, M. Per-Pixel Land Cover Accuracy Prediction: A Random Forest-Based Method with Limited Reference Sample Data. ISPRS J. Photogramm. Remote Sens. 2021, 172, 17–27. [Google Scholar] [CrossRef]
- Lang, N.; Jetz, W.; Schindler, K.; Wegner, J.D. A High-Resolution Canopy Height Model of the Earth. arXiv 2022, arXiv:2204.08322. [Google Scholar]
- Pasquarella, V.J.; Arévalo, P.; Bratley, K.H.; Bullock, E.L.; Gorelick, N.; Yang, Z.; Kennedy, R.E. Demystifying LandTrendr and CCDC Temporal Segmentation. Int. J. Appl. Earth Obs. Geoinf. 2022, 110, 102806. [Google Scholar] [CrossRef]
- Potere, D.; Schneider, A. A Critical Look at Representations of Urban Areas in Global Maps. GeoJournal 2007, 69, 55–80. [Google Scholar] [CrossRef]
- Meng, L.; Mao, J.; Zhou, Y.; Richardson, A.D.; Lee, X.; Thornton, P.E.; Ricciuto, D.M.; Li, X.; Dai, Y.; Shi, X. Urban Warming Advances Spring Phenology but Reduces the Response of Phenology to Temperature in the Conterminous United States. Proc. Natl. Acad. Sci. USA 2020, 117, 4228–4233. [Google Scholar] [CrossRef]
- Uroy, L.; Alignier, A.; Mony, C.; Foltête, J.-C.; Ernoult, A. How to Assess the Temporal Dynamics of Landscape Connectivity in Ever-Changing Landscapes: A Literature Review. Landsc. Ecol. 2021, 36, 2487–2504. [Google Scholar] [CrossRef]
- Notte, A.L.; Czúcz, B.; Vallecillo, S.; Polce, C.; Maes, J. Ecosystem Condition Underpins the Generation of Ecosystem Services: An Accounting Perspective. One Ecosyst. 2022, 7, e81487. [Google Scholar] [CrossRef]
- McGill, B.J. Towards a Unification of Unified Theories of Biodiversity. Ecol. Lett. 2010, 13, 627–642. [Google Scholar] [CrossRef]
- Jakobsson, S.; Töpper, J.P.; Evju, M.; Framstad, E.; Lyngstad, A.; Pedersen, B.; Sickel, H.; Sverdrup-Thygeson, A.; Vandvik, V.; Velle, L.G. Setting Reference Levels and Limits for Good Ecological Condition in Terrestrial Ecosystems–Insights from a Case Study Based on the IBECA Approach. Ecol. Indic. 2020, 116, 106492. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dynamic World | Esri LULC | World Cover |
|---|---|---|
| Built Area | Built Area | Built-up |
| Clusters of human-made structures or individual very large human-made structures. Contained industrial, commercial and private building and the associated parking lots. A mixture of residential buildings, streets, lawns, trees, isolated residential structures or buildings surrounded by vegetative land cover. Major road and rail networks outside of the predominant residential areas. Large homogeneous impervious surfaces, including parking structures, large office buildings and residential housing developments containing clusters of cul-de-sacs. | Human-made structures; major road and rail networks; large homogenous impervious surfaces, including parking structures, office buildings and residential housing; examples: houses, dense villages/towns/cities, paved roads, asphalt. | Land covered by buildings, roads and other man-made structures, such as railroads. Buildings include both residential and industrial buildings. Urban green (parks, sport facilities) is not included in this class. Waste dump deposits and extraction sites are considered as bare. |
| Crops | Crops | Cropland |
| Human planted/plotted cereals, grasses and crops. | Human planted/plotted cereals, grasses and crops not at tree height; examples: corn, wheat, soy, fallow plots of structured land. | Land covered with annual cropland that is sowed/planted and harvestable at least once within the 12 months after the sowing/planting date. The annual cropland produces a herbaceous cover and is sometimes combined with some tree or woody vegetation. Note that perennial woody crops will be classified as the appropriate tree cover or shrub land cover type. Greenhouses are considered as built-up. |
| Bare ground | Bare ground | Barren/sparse vegetation |
| Areas of rock or soil containing very sparse to no vegetation. Large areas of sand and deserts with no to little vegetation. Large individual or dense networks of dirt roads. | Areas of rock or soil with very sparse to no vegetation for the entire year; large areas of sand and deserts with no to little vegetation; examples: exposed rock or soil, desert and sand dunes, dry salt flats/pans, dried lake beds, mines. | Lands with exposed soil, sand or rocks and never has more than 10 % vegetated cover during any time of the year. |
| Moss and Lichen | ||
| Land covered with lichens and/or mosses. Lichens are composite organisms formed from the symbiotic association of fungi and algae. Mosses contain photo-autotrophic land plants without true leaves, stems, roots but with leaf- and stemlike organs. | ||
| Grass | Grass | Grassland |
| Open areas covered in homogenous grasses with little to no taller vegetation. Other homogenous areas of grass-like vegetation (blade-type leaves) that appear different from trees and shrubland. Wild cereals and grasses with no obvious human plotting (i.e., not a structured field). | Open areas covered in homogenous grasses with little to no taller vegetation; wild cereals and grasses with no obvious human plotting (i.e., not a plotted field); examples: natural meadows and fields with sparse to no tree cover, open savanna with few to no trees, parks/golf courses/lawns, pastures. | This class includes any geographic area dominated by natural herbaceous plants (plants without persistent stem or shoots above ground and lacking definite firm structure): (grasslands, prairies, steppes, savannahs, pastures) with a cover of 10% or more, irrespective of different human and/or animal activities, such as: grazing, selective fire management, etc. Woody plants (trees and/or shrubs) can be present assuming their cover is less than 10%. It may also contain uncultivated cropland areas (without harvest/bare soil period) in the reference year. |
| Shrub and scrub | Shrub and scrub | Shrubland |
| Mix of small clusters of plants or individual plants dispersed on a landscape that shows exposed soil and rock. Scrub-filled clearings within dense forests that are clearly not taller than trees. Appear grayer/browner due to less dense leaf cover. | Mix of small clusters of plants or single plants dispersed on a landscape that shows exposed soil or rock; scrub-filled clearings within dense forests that are clearly not taller than trees; examples: moderate to sparse cover of bushes, shrubs and tufts of grass, savannas with very sparse grasses, trees or other plants. | This class includes any geographic area dominated by natural shrubs having a cover of 10% or more. Shrubs are defined as woody perennial plants with persistent and woody stems and without any defined main stem being less than 5 m tall. Trees can be present in scattered form if their cover is less than 10%. Herbaceous plants can also be present at any density. The shrub foliage can be either evergreen or deciduous. |
| Trees | Trees | Trees |
| Any significant clustering of dense vegetation, typically with a closed or dense canopy. Taller and darker than surrounding vegetation (if surrounded by other vegetation). | Any significant clustering of tall (~15 feet or higher) dense vegetation, typically with a closed or dense canopy; examples: wooded vegetation, clusters of dense tall vegetation within savannas, plantations, swamp or mangroves (dense/tall vegetation with ephemeral water or canopy too thick to detect water underneath). | This class includes any geographic area dominated by trees with a cover of 10% or more. Other land cover classes (shrubs and/or herbs in the understorey, built-up, permanent water bodies…) can be present below the canopy, even with a density higher than trees. Areas planted with trees for afforestation purposes and plantations (e.g., oil palm, olive trees) are included in this class. This class also includes tree-covered areas seasonally or permanently flooded with fresh water except for mangroves. |
| Flooded vegetation | Flooded vegetation | Herbaceous wetland |
| Areas of any type of vegetation with obvious intermixing of water. Do not assume an area is flooded if flooding is observed in another image. Seasonally flooded areas that are a mix of grass/shrub/trees/bare ground. | Areas of any type of vegetation with obvious intermixing of water throughout a majority of the year; seasonally flooded area that is a mix of grass/shrub/trees/bare ground; examples: flooded mangroves, emergent vegetation, rice paddies and other heavily irrigated and inundated agriculture. | Land dominated by natural herbaceous vegetation (cover of 10% or more) that is permanently or regularly flooded by fresh, brackish or salt water. It excludes unvegetated sediment (see 60), swamp forests (classified as tree cover) and mangroves see 95). |
| Mangroves | ||
| Taxonomically diverse, salt-tolerant tree and other plant species, which thrive in intertidal zones of sheltered tropical shores, “overwash” islands and estuaries. | ||
| Water | Water | Open water |
| Water is present in the image. Contains little to no sparse vegetation, no rock outcrop and no built-up features, such as docks. Does not include land that can or has previously been covered by water. | Areas where water was predominantly present throughout the year; may not cover areas with sporadic or ephemeral water; contains little to no sparse vegetation, no rock outcrop nor built up features, such as docks; examples: rivers, ponds, lakes, oceans, flooded salt plains. | This class includes any geographic area covered for most of the year (more than 9 months) by water bodies: lakes, reservoirs and rivers. Can be either fresh- or salt-water bodies. In some cases, the water can be frozen for part of the year (less than 9 months). |
| Snow and ice | Snow and ice | Snow and ice |
| Large homogenous areas of thick snow or ice, typically only in mountain areas or highest latitudes. Large homogenous areas of snowfall. | Large homogenous areas of permanent snow or ice, typically only in mountain areas or highest latitudes; examples: glaciers, permanent snowpack, snow fields. | This class includes any geographic area covered by snow or glaciers persistently. |
| LULC Class | LUCAS Classes Used and Descriptions |
|---|---|
| Built area | Artificial land (A00): Areas characterized by an artificial and often impervious cover of constructions and pavement. Includes roofed built-up areas and non-built-up area features, such as parking lots and yards. Excludes non-built-up linear features, such as roads, and other artificial areas, such as bridges and viaducts, mobile homes, solar panels, power plants, electrical substations, pipelines, water sewage plants and open dump sites. |
| Cropland | Cropland (B00): Areas where seasonal or perennial crops are planted and cultivated, including cereals, root crops, non-permanent industrial crops, dry pulses, vegetables, flowers, fodder crops, fruit trees and other permanent crops. Excludes temporary grasslands, which are artificial pastures that may only be planted for one year. |
| Bare ground | Bare land and lichens/moss (F00): Areas with no dominant vegetation cover on at least 90% of the area or areas covered by lichens/moss. Excludes other bare soil, which includes bare arable land, temporarily unstocked areas within forests, burnt areas, secondary land cover for tracks and parking areas/yards. |
| Grass | Grassland (E00): Land predominantly covered by communities of grassland, grass-like plants and forbs. This class includes permanent grassland and permanent pasture that is not part of a crop rotation (normally for 5 years or more). It may include sparsely occurring trees within a limit of a canopy below 10% and shrubs within a total limit of cover (including trees) of 20%. May include: dry grasslands, dry edaphic meadows, steppes with gramineae and artemisia, plain and mountainous grassland, wet grasslands, alpine and subalpine grasslands, saline grasslands, arctic meadows, set aside land within agricultural areas (including unused land where revegetation is occurring) and clear cuts within previously existing forests. Excludes spontaneously re-vegetated surfaces consisting of agricultural land that has not been cultivated this year or the years before, clear-cut forest areas, industrial “brownfields” and storage land. |
| Shrub and scrub | Shrubland (D00): Areas dominated (at least 10% of the surface) by shrubs and low woody plants normally not able to reach >5 m of height. It may include sparsely occurring trees with a canopy below 10%. Excludes berries, vineyards and orchards. |
| Trees | Woodland (C00): Areas with a tree canopy cover of at least 10%, including woody hedges and palm trees. Includes a range of coniferous and deciduous forest types. Excludes forest tree nurseries, young plantations or natural stands (<10% canopy cover) dominated by shrubs or grass. |
| Flooded vegetation | Wetlands (H00): Wetlands located inland and having fresh water and wetlands located on marine coasts or having salty or brackish water as well as areas of a marine origin. |
| Water | Water areas (G10 to G40): Inland or coastal areas without vegetation and covered by water and flooded surfaces, or likely to be so over a large part of the year. |
| Snow and ice | Glaciers, permanent snow (G50): Areas covered by glaciers (generally measured at the time of their greatest expansion in the season) or permanent snow. |
| Accuracy | Dynamic World | Esri | World Cover |
|---|---|---|---|
| Global validation | 72% | 75% | 65% |
| Regional validation (European) | 66% | 63% | 71% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Venter, Z.S.; Barton, D.N.; Chakraborty, T.; Simensen, T.; Singh, G. Global 10 m Land Use Land Cover Datasets: A Comparison of Dynamic World, World Cover and Esri Land Cover. Remote Sens. 2022, 14, 4101. https://doi.org/10.3390/rs14164101
Venter ZS, Barton DN, Chakraborty T, Simensen T, Singh G. Global 10 m Land Use Land Cover Datasets: A Comparison of Dynamic World, World Cover and Esri Land Cover. Remote Sensing. 2022; 14(16):4101. https://doi.org/10.3390/rs14164101
Chicago/Turabian StyleVenter, Zander S., David N. Barton, Tirthankar Chakraborty, Trond Simensen, and Geethen Singh. 2022. "Global 10 m Land Use Land Cover Datasets: A Comparison of Dynamic World, World Cover and Esri Land Cover" Remote Sensing 14, no. 16: 4101. https://doi.org/10.3390/rs14164101