
Energy-Efficient Cooperative MIMO Formation for Underwater MI-Assisted Acoustic Wireless Sensor Networks


Abstract
:1. Introduction
1.1. Related Works
1.2. Contributions and Characteristics
- A mathematical model is developed to analyze the energy consumption of underwater MI-assisted acoustic cooperative MIMO networks, which considers the heterogeneity of local and long-haul transmissions, and the data aggregation to reduce spatial correlation.
- A cooperative MIMO size optimization (CMSO) algorithm based on the energy consumption model is proposed, to determine whether to adopt cooperative MIMO and to derive the optimal cooperative MIMO size in theory. It is worth noting that the power allocation for MI and acoustic communication under the maximum transmission power constraint is especially considered.
- In the underwater MI-assisted acoustic cooperative MIMO networks, the expected transmission distance is determined by the distance between the node and the surface BS. Under the requirement of ensuring the network’s connectivity, we propose a competitive cooperative MIMO formation (CCMF) algorithm to select appropriate MN and form cooperative MIMO to prolong network lifetime, in which the optimal cooperative MIMO size determined by the CMSO algorithm is taken as an essential parameter.
2. Preliminaries
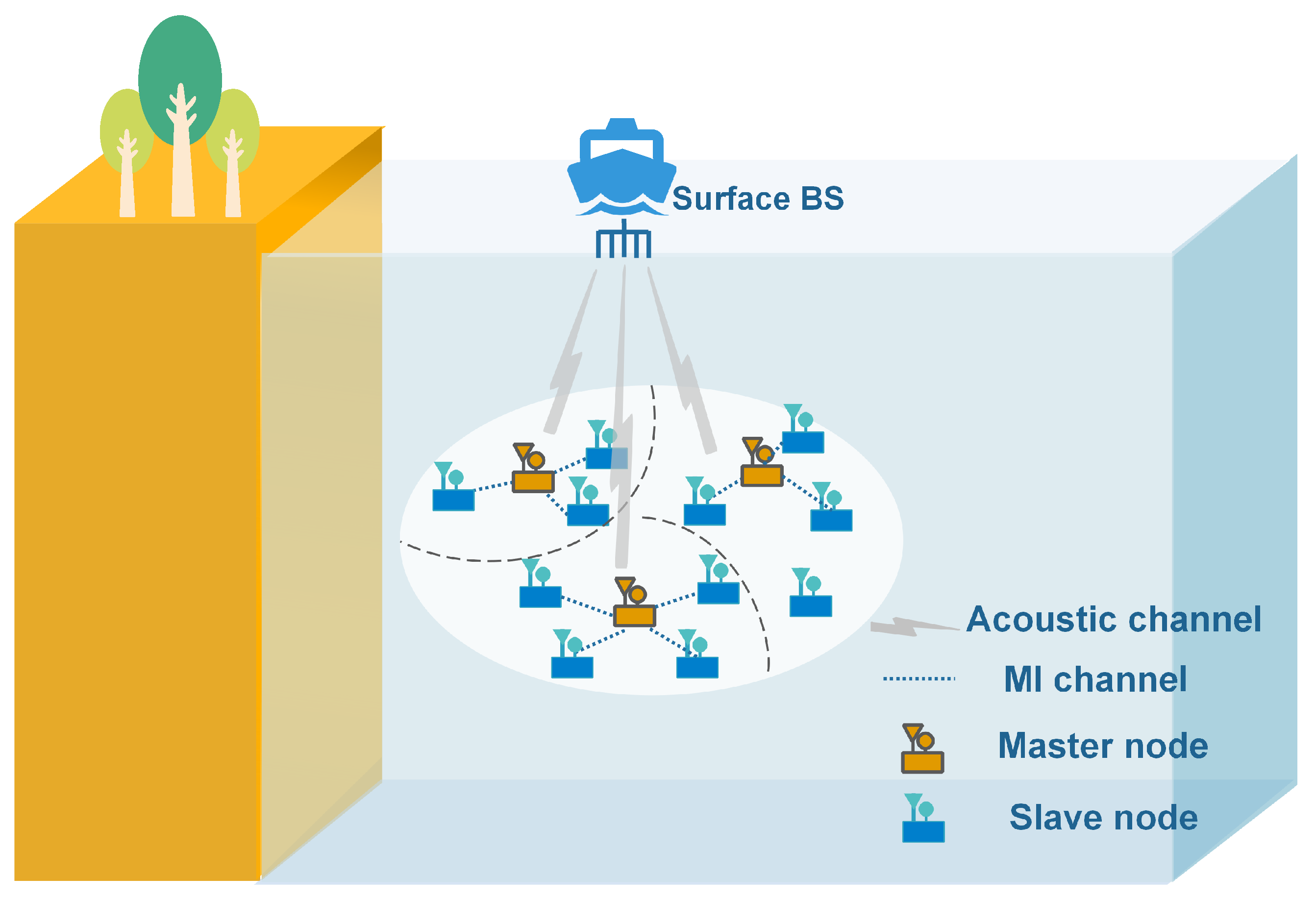
2.1. Scenario and Notation
- The underwater environment is basically stable.
- Sensors nodes and surface BS are not affected by water flow.
- Their locations are known with the help of localization techniques.
2.2. Transmission Scheme
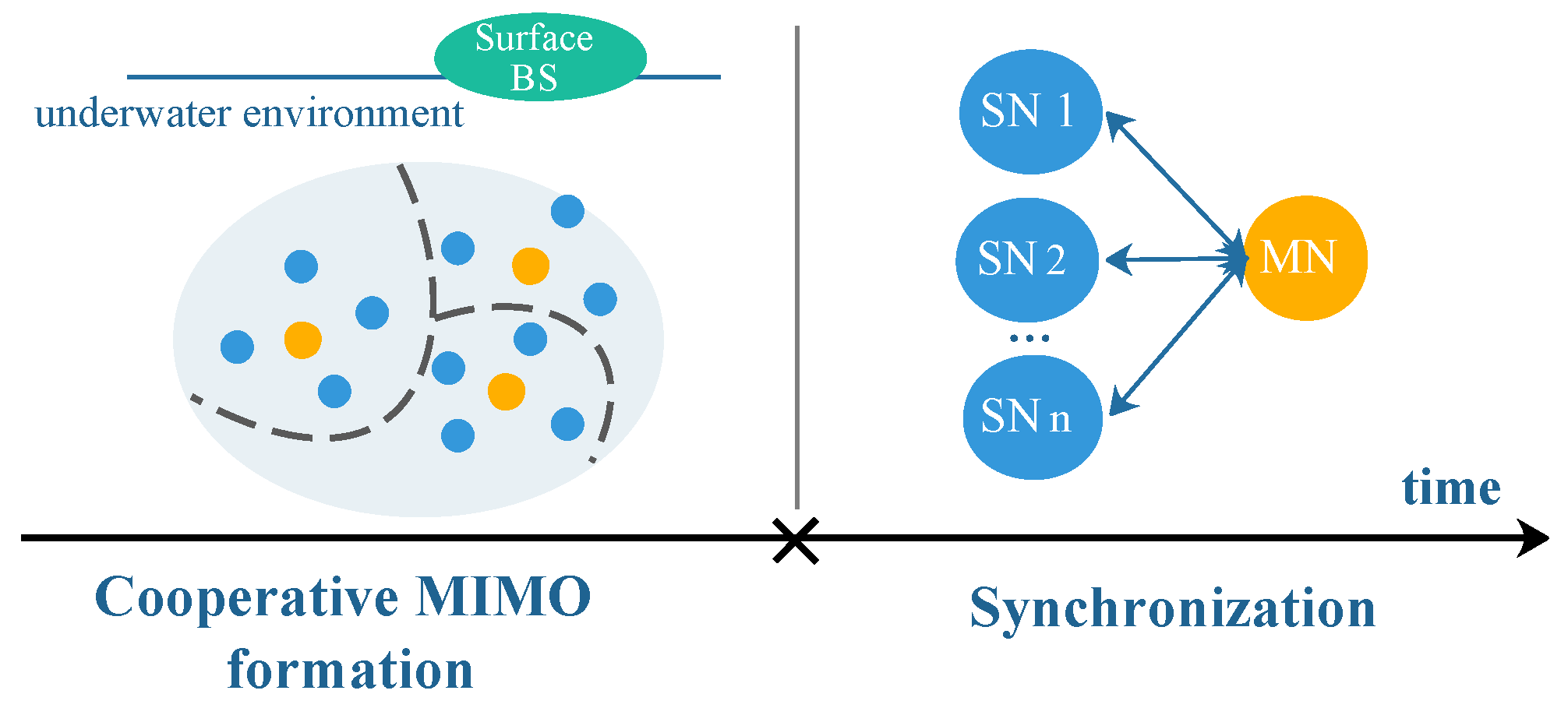
- Phase 1 (Cooperative MIMO formation) The MN is selected according to the location of the nodes and the number of nodes required to form cooperative MIMO in theory. Then, the remaining nodes are chosen by MN as SN to form a cooperative MIMO. The process is described in detail in Section 4.
- Phase 2 (Synchronization) The SNs adjust their clocks and frequencies to that of MN by Timing-Sync Protocol for Sensor Networks (TPSN) [36]. For beamforming communications, the CSI of the MN also needs to be delivered to the SNs to compute the beamforming codebook. By considering the optimal phase control, the channel delay can be compensated for by the phase control, and the SNR at the received side can be maximized.
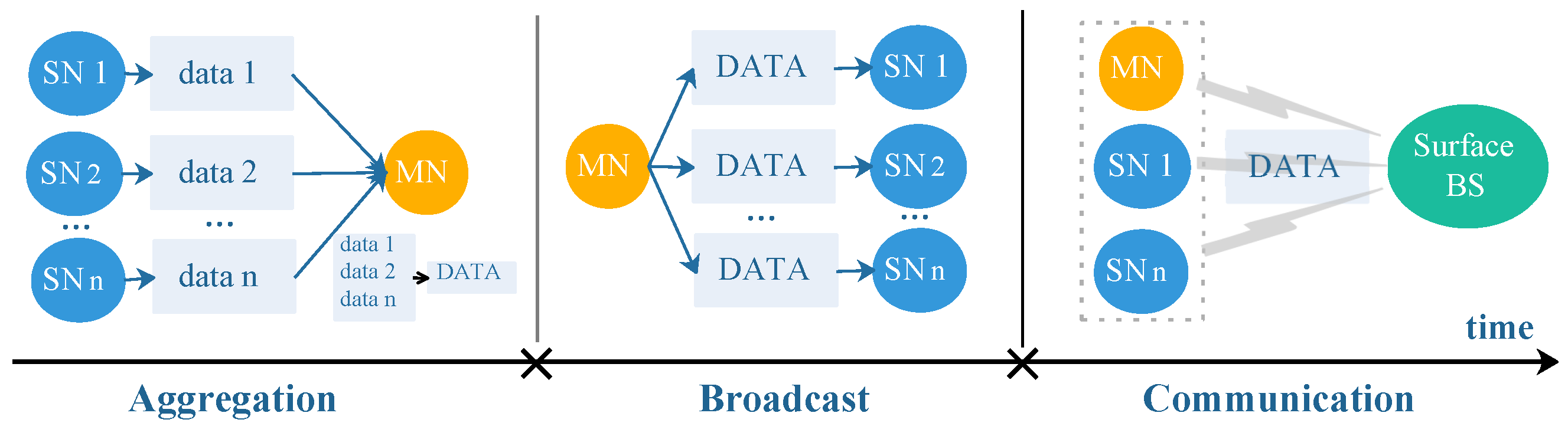
- Phase 3 (Aggregation). The MN collects the detection information of SNs and compresses the data according to the spatial correlation of the information.
- Phase 4 (Broadcast). The MN broadcasts the compressed data to their SNs.
- Phase 5 (Communication). Individual nodes concurrently transmit the compressed data over the acoustic channel to the surface BS using a beamforming scheme.
2.3. Channel Characteristics
3. Cooperative MIMO Size Optimization
3.1. Energy Model
3.2. Cooperative MIMO Size Optimization
| Algorithm 1 Cooperative MIMO size optimization (CMSO) algorithm. |
| Input: |
| d, , . |
| Output: |
| , , , , Index. |
| 1: Initialization: Determine the interval by via (20). |
| 2: i = 1. |
| 3: whiledo |
| 4: With the fixed , obtain the optimal and , via (23). |
| 5: if then |
| 6: Index = 1. |
| 7: else |
| 8: Index = 0. |
| 9: end if |
| 10: i = i + 1. |
| 11: end while |
| 12: if Index = 1 then |
| 13: Get the optimal , and get , correspondingly. |
| 14: Calculate the energy consumption without cooperative MIMO by n = 0 via (12). |
| 15: if , update , then |
| 16: Index = 2. |
| 17: . |
| 18: end if |
| 19: end if |
4. Cooperative MIMO Formation Procedure
4.1. MN Selection
4.2. Competitive Cooperative MIMO Formation Algorithm
| Algorithm 2 Competitive cooperative MIMO formation (CCMF) algorithm. |
| Input: |
| Sensor nodes’ location and residue energy |
| Output: |
| , |
| 1: Initialization: Each node runs Algorithm 1 to get its own optimal size , then calculates and sorts its VoN in the descending order as . |
| 2: . |
| 3: whiledo |
| 4: Set as the MN of the cooperative MIMO i, and the nodes within the optimal range of are |
| 5: if then |
| 6: Tire inflation process |
| 7: end if |
| 8: if and then |
| 9: Delete from the list |
| 10: end if |
| 11: , |
| 12: |
| 13: end while |
| 14: , |
| Algorithm 3 Tire inflation process. |
| Input: |
| , , , , , , |
| Output: |
| , |
| 1: |
| 2: Deflation process: |
| 3: ifthen |
| 4: while do |
| 5: |
| 6: Update the neighbor nodes using |
| 7: end while |
| 8: end if |
| 9: Inflation process: |
| 10: ifthen |
| 11: while do |
| 12: if then |
| 13: |
| 14: Update the neighbor nodes using |
| 15: else |
| 16: Delete from the list |
| 17: end if |
| 18: end while |
| 19: end if |
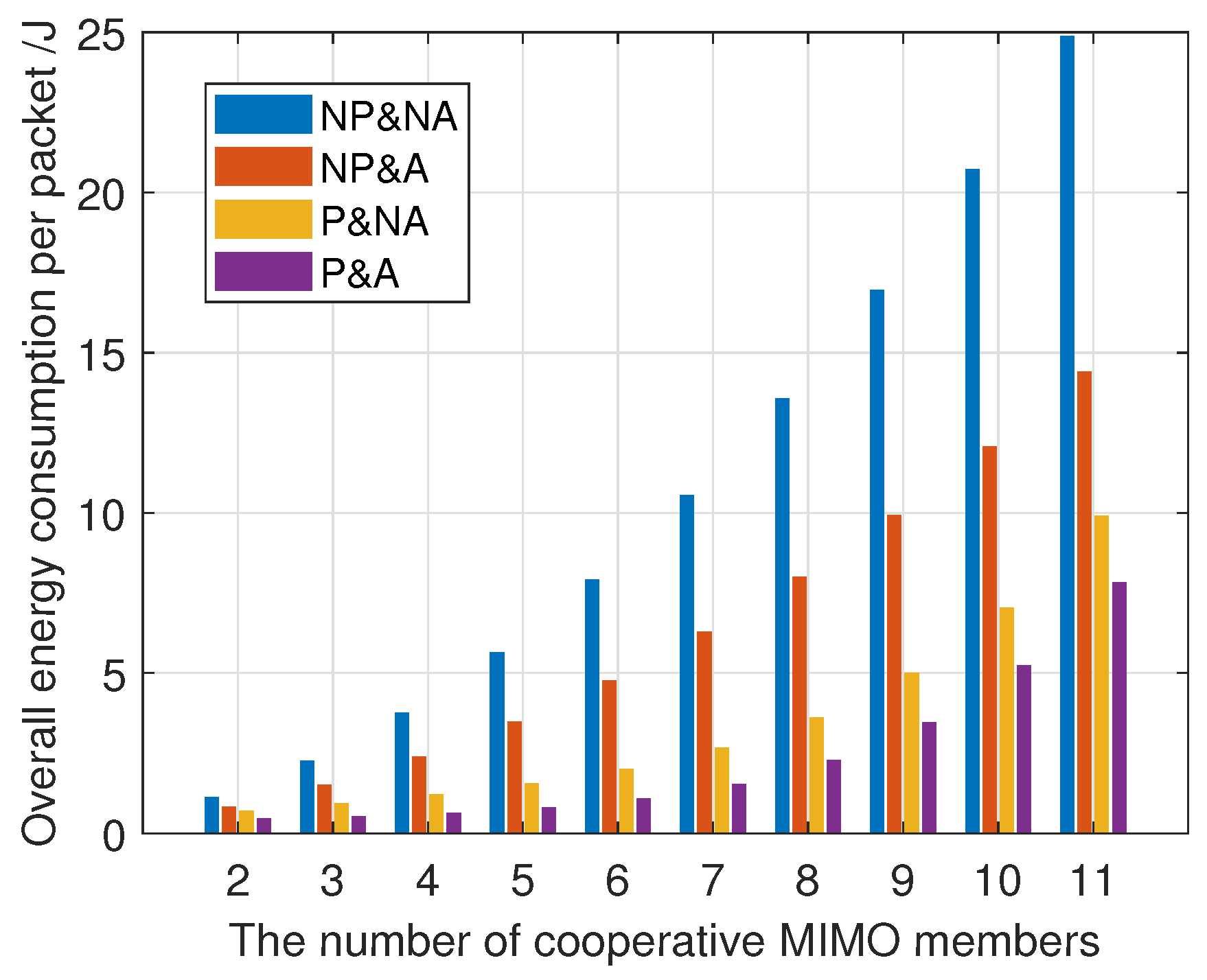
5. Results and Analysis
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Darehshoorzadeh, A.; Boukerche, A. Underwater sensor networks: A new challenge for opportunistic routing protocols. IEEE Commun. Mag. 2015, 53, 98–107. [Google Scholar] [CrossRef]
- Villa, J.; Aaltonen, J.; Virta, S.; Koskinen, K.T. A Co-Operative Autonomous Offshore System for Target Detection Using Multi-Sensor Technology. Remote Sens. 2020, 12, 4106. [Google Scholar] [CrossRef]
- Mezni, H.; Driss, M.; Boulila, W.; Ben Atitallah, S.; Sellami, M.; Alharbi, N. SmartWater: A Service-Oriented and Sensor Cloud-Based Framework for Smart Monitoring of Water Environments. Remote Sens. 2022, 14, 922. [Google Scholar] [CrossRef]
- Guo, H.; Sun, Z.; Wang, P. Joint Design of Communication, Wireless Energy Transfer, and Control for Swarm Autonomous Underwater Vehicles. IEEE Trans. Veh. Technol. 2021, 70, 1821–1835. [Google Scholar] [CrossRef]
- Stojanovic, M.; Preisig, J. Underwater acoustic communication channels: Propagation models and statistical characterization. IEEE Commun. Mag. 2009, 47, 84–89. [Google Scholar] [CrossRef]
- Singer, A.C.; Nelson, J.K.; Kozat, S.S. Signal Processing for Underwater Acoustic Communications. IEEE Commun. Mag. 2009, 47, 90–96. [Google Scholar] [CrossRef]
- Coutinho, R.; Boukerche, A.; Vieira, L.; Loureiro, A. On the design of green protocols for underwater sensor networks. IEEE Commun. Mag. 2016, 54, 67–73. [Google Scholar] [CrossRef]
- Zhang, J.; Zheng, Y.R. Frequency-Domain Turbo Equalization with Soft Successive Interference Cancellation for Single Carrier MIMO Underwater Acoustic Communications. IEEE Trans. Wirel. Commun. 2011, 10, 2872–2882. [Google Scholar] [CrossRef]
- Pailhas, Y.; Petillot, Y.; Brown, K.; Mulgrew, B. Spatially Distributed MIMO Sonar Systems: Principles and Capabilities. IEEE J. Ocean. Eng. 2017, 42, 738–751. [Google Scholar] [CrossRef] [Green Version]
- Sklivanitis, G.; Cao, Y.; Batalama, S.N.; Su, W. Distributed MIMO Underwater Systems: Receiver Design and Software-defined Testbed Implementation. In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016. [Google Scholar]
- Kai, T.; Duman, T.M.; Proakis, J.G.; Stojanovic, M. Cooperative MIMO-OFDM communications: Receiver design for Doppler-distorted underwater acoustic channels. In Proceedings of the Signals, Systems & Computers, Pacific Grove, CA, USA, 7–10 November 2010. [Google Scholar]
- Brown, D.R.; Poor, H.V. Time-Slotted Round-Trip Carrier Synchronization for Distributed Beamforming. IEEE Trans. Signal Process. 2008, 56, 5630–5643. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Desai, S.; Soham, S.D.; Wang, P.; Han, J.; Sun, Z. Underwater Cooperative MIMO Communications using Hybrid Acoustic and Magnetic Induction Technique. Comput. Netw. 2020, 173, 487–502. [Google Scholar] [CrossRef] [Green Version]
- Guo, H.; Sun, Z.; Wang, P. Multiple Frequency Band Channel Modeling and Analysis for Magnetic Induction Communication in Practical Underwater Environments. IEEE Trans. Veh. Technol. 2017, 66, 6619–6632. [Google Scholar] [CrossRef]
- Kisseleff, S.; Akyildiz, I.F.; Gerstacker, W.H. Survey on Advances in Magnetic Induction-Based Wireless Underground Sensor Networks. IEEE Internet Things J. 2017, 5, 4843–4856. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Wang, P.; Sun, Z. Realizing Underwater Communication through Magnetic Induction. IEEE Commun. Mag. 2015, 53, 42–48. [Google Scholar] [CrossRef]
- Desai, S.; Sudev, V.D.; Tan, X.; Wang, P.; Sun, Z. Enabling Underwater Acoustic Cooperative MIMO Systems by Metamaterial-Enhanced Magnetic Induction. In Proceedings of the 2019 IEEE Wireless Communications and Networking Conference, Marrakesh, Morocco, 15–18 April 2019. [Google Scholar]
- Ren, Q.; Sun, Y.; Li, S.; Zhang, L.; Sun, Z. On Connectivity of Wireless Underwater Sensor Networks Using MI-assisted Acoustic Distributed Beamforming. In Proceedings of the 2019 14th International Conference on Underwater Networks Systems (WUWNET’19), Atlanta, GA, USA, 23–25 October 2019; pp. 370–378. [Google Scholar]
- Ren, Q.; Sun, Y.; Huo, Y.; Zhang, L.; Li, S. Connectivity on Underwater MI-Assisted Acoustic Cooperative MIMO Networks. Sensors 2020, 20, 3317. [Google Scholar] [CrossRef]
- Pattem, S.; Krishnamachari, B.; Govindan, R. The impact of spatial correlation on routing with compression in wireless sensor networks. In Proceedings of the International Symposium on Information Processing in Sensor Networks, Berkeley, CA, USA, 27 April 2004. [Google Scholar]
- Krishnamachari, L.; Estrin, D.; Wicker, S. The Impact of Data Aggregation in Wireless Sensor Networks. In Proceedings of the International Conference on Distributed Computing Systems Workshops, Vienna, Austria, 2–5 July 2002. [Google Scholar]
- Heinzelman, W.; Chandrakasan, A.; Balakrishnan, H. An Application-Specific Protocol Architecture for Wireless Microsensor Networks. IEEE Trans. Wirel. Commun. 2002, 1, 660–670. [Google Scholar] [CrossRef] [Green Version]
- Yen, H.H.; Lin, C.L. Integrated channel assignment and data aggregation routing problem in wireless sensor networks. IET Commun. 2009, 3, 784–793. [Google Scholar] [CrossRef]
- Moh, M.; Kim, E.J.; Moh, T.S. Design and analysis of distributed power scheduling for data aggregation in wireless sensor networks. Int. J. Sens. Netw. 2006, 1, 143–155. [Google Scholar] [CrossRef]
- Cui, S.; Goldsmith, A.; Bahai, A. Energy-efficiency of MIMO and Cooperative MIMO Techniques in Sensor Networks. IEEE J. Sel. Areas Commun. 2004, 22, 1089–1098. [Google Scholar] [CrossRef]
- Jayaweera, S.K. Virtual MIMO-based Cooperative Communication for Energy-constrained Wireless Sensor Networks. IEEE Trans. Wirel. Commun. 2006, 5, 984–989. [Google Scholar] [CrossRef]
- Aminzadeh, R.; Kashefi, F. Energy-Efficient Cooperative Communication in a Clustered Wireless Sensor Network. IEEE Trans. Veh. Technol. 2008, 57, 3618–3628. [Google Scholar]
- Zhou, Z.; Zhou, S.; Cui, J.H.; Cui, S. Energy-Efficient Cooperative Communication Based on Power Control and Selective Single-Relay in Wireless Sensor Networks. IEEE Trans. Wirel. Commun. 2008, 7, 3066–3078. [Google Scholar] [CrossRef]
- Siam, M.Z.; Krunz, M.; Cui, S.; Muqattash, A. Energy-efficient protocols for wireless networks with adaptive MIMO capabilities. Wirel. Netw. 2010, 16, 199–212. [Google Scholar] [CrossRef] [Green Version]
- Rosas, F.; Oberli, C. Effect of the CSI on the energy consumption of MIMO communications. IEEE Trans. Wirel. Commun. 2015, 14, 4156–4169. [Google Scholar] [CrossRef]
- Gao, Q.; Zuo, Y.; Zhang, J.; Peng, X. Improving Energy Efficiency in a Wireless Sensor Network by Combining Cooperative MIMO with Data Aggregation. IEEE Trans. Veh. Technol. 2010, 59, 3956–3965. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Fei, L.; Gao, Q.; Peng, X.H. Energy-Efficient Multihop Cooperative MISO Transmission with Optimal Hop Distance in Wireless Ad Hoc Networks. IEEE Trans. Wirel. Commun. 2011, 10, 3426–3435. [Google Scholar] [CrossRef] [Green Version]
- Guo, S.; Wang, F.; Yang, Y.; Xiao, B. Energy-Efficient Cooperative for Simultaneous Wireless Information and Power Transfer in Clustered Wireless Sensor Networks. IEEE Trans. Commun. 2015, 63, 4405–4417. [Google Scholar] [CrossRef]
- Ayatollahi, H.; Tapparello, C.; Heinzelman, W. MAC-LEAP: Multi-antenna, Cross layer, Energy Adaptive Protocol—ScienceDirect. Ad Hoc Netw. 2019, 83, 91–110. [Google Scholar] [CrossRef]
- Zhang, Y.; Su, Y.; Shen, X.; Wang, A.; Wang, B.; Liu, Y.; Bai, W. Reinforcement Learning Based Relay Selection for Underwater Acoustic Cooperative Networks. Remote Sens. 2022, 14, 1417. [Google Scholar] [CrossRef]
- Ganeriwal, S.; Kumar, R.; Srivastava, M.B. Timing-sync Protocol for Sensor Networks. In Proceedings of the 2003 International Conference on Embedded Networked Sensor Systems, Los Angeles, CA, USA, 5–7 November 2003. [Google Scholar]
- Brechovskich, L.M.; Lysanov, J.P. Fundamentals of Ocean Acoustics; Springer: Berlin/Heidelberg, Germany, 1991. [Google Scholar]
- Domingo, M.C. Magnetic Induction for Underwater Wireless Communication Networks. IEEE Trans. Antennas Propag. 2012, 60, 2929–2939. [Google Scholar] [CrossRef]
- Li, Y.; Wang, S.; Jin, C.; Zhang, Y.; Jiang, T. A Survey of Underwater Magnetic Induction Communications: Fundamental Issues, Recent Advances, and Challenges. IEEE Commun. Surv. Tutor. 2019, 21, 2466–2487. [Google Scholar] [CrossRef]
- Ghoreyshi, S.M.; Shahrabi, A.; Boutaleb, T.; Khalily, M. Mobile Data Gathering with Hop-Constrained Clustering in Underwater Sensor Networks. IEEE Access 2019, 7, 21118–21132. [Google Scholar] [CrossRef]
- Yu, W.; Chen, Y.; Wan, L.; Zhang, X.; Xu, X. An Energy Optimization Clustering Scheme for Multi-Hop Underwater Acoustic Cooperative Sensor Networks. IEEE Access 2020, 8, 89171–89184. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Notation |
|---|---|
| The radius of the transmitting coil | |
| The radius of the receiving coil | |
| The number of turns of the transmitting coil | |
| The number of turns of the receiving coil | |
| The self inductance of the transmitting coil | |
| The self inductance of the receiving coil | |
| The resistance of the transmitting coil | |
| The resistance of the receiving coil | |
| The impedance of the transmitting coil | |
| The impedance of the receiving coil | |
| The reflected impedance of the receiver on the transmitter | |
| The reflected impedance of the transmitter on the receiver | |
| The load impedance |
| Parameter | Value |
|---|---|
| Maximal transmission power of MI [41] | 50 W |
| Maximal transmission power of acoustic [41] | 50 W |
| Circuits’ power consumed [41] | 0.158 W |
| Frequency of MI [13] | 1 MHz |
| Data transmission rate of MI [13,31] | 40 kbit/s |
| Data transmission rate of acoustic [13,31] | 20 kbit/s |
| Frequency of ac [13] | 10 kHz |
| Circuits’ size [13] | 0.1 m |
| Total noise for MI [13] | mW |
| Shipping activity factor s [35] | 0.5 |
| Wind speed [35] | 0 m/s |
| Packet lengths D | 50 bits |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, Q.; Sun, Y.; Wang, T.; Zhang, B. Energy-Efficient Cooperative MIMO Formation for Underwater MI-Assisted Acoustic Wireless Sensor Networks. Remote Sens. 2022, 14, 3641. https://doi.org/10.3390/rs14153641
Ren Q, Sun Y, Wang T, Zhang B. Energy-Efficient Cooperative MIMO Formation for Underwater MI-Assisted Acoustic Wireless Sensor Networks. Remote Sensing. 2022; 14(15):3641. https://doi.org/10.3390/rs14153641
Chicago/Turabian StyleRen, Qingyan, Yanjing Sun, Tingting Wang, and Beibei Zhang. 2022. "Energy-Efficient Cooperative MIMO Formation for Underwater MI-Assisted Acoustic Wireless Sensor Networks" Remote Sensing 14, no. 15: 3641. https://doi.org/10.3390/rs14153641