
Multi-Parameter Inversion of AIEM by Using Bi-Directional Deep Neural Network

Abstract
:1. Introduction
2. Materials and Methods
2.1. Experimental Data
2.2. Method
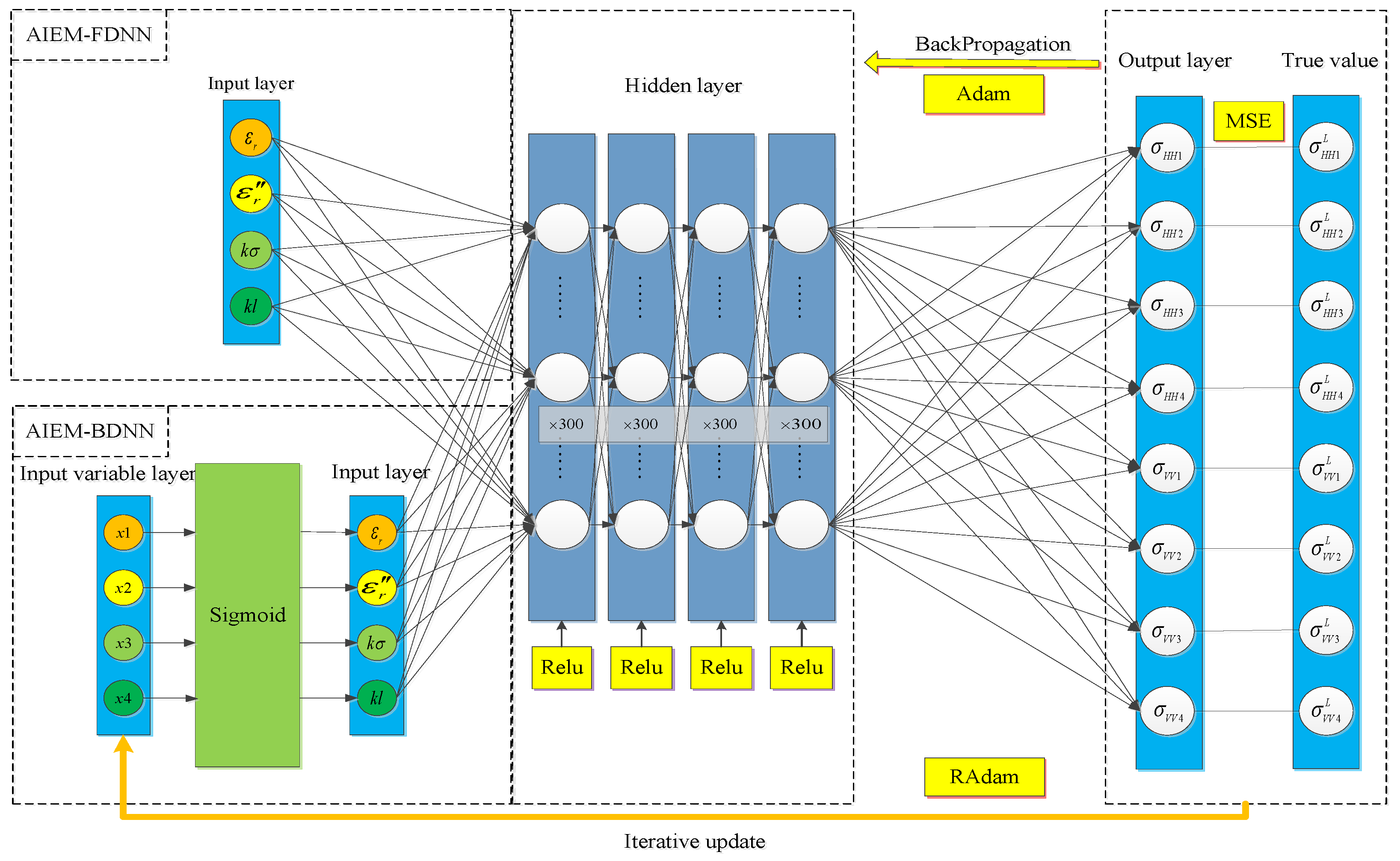
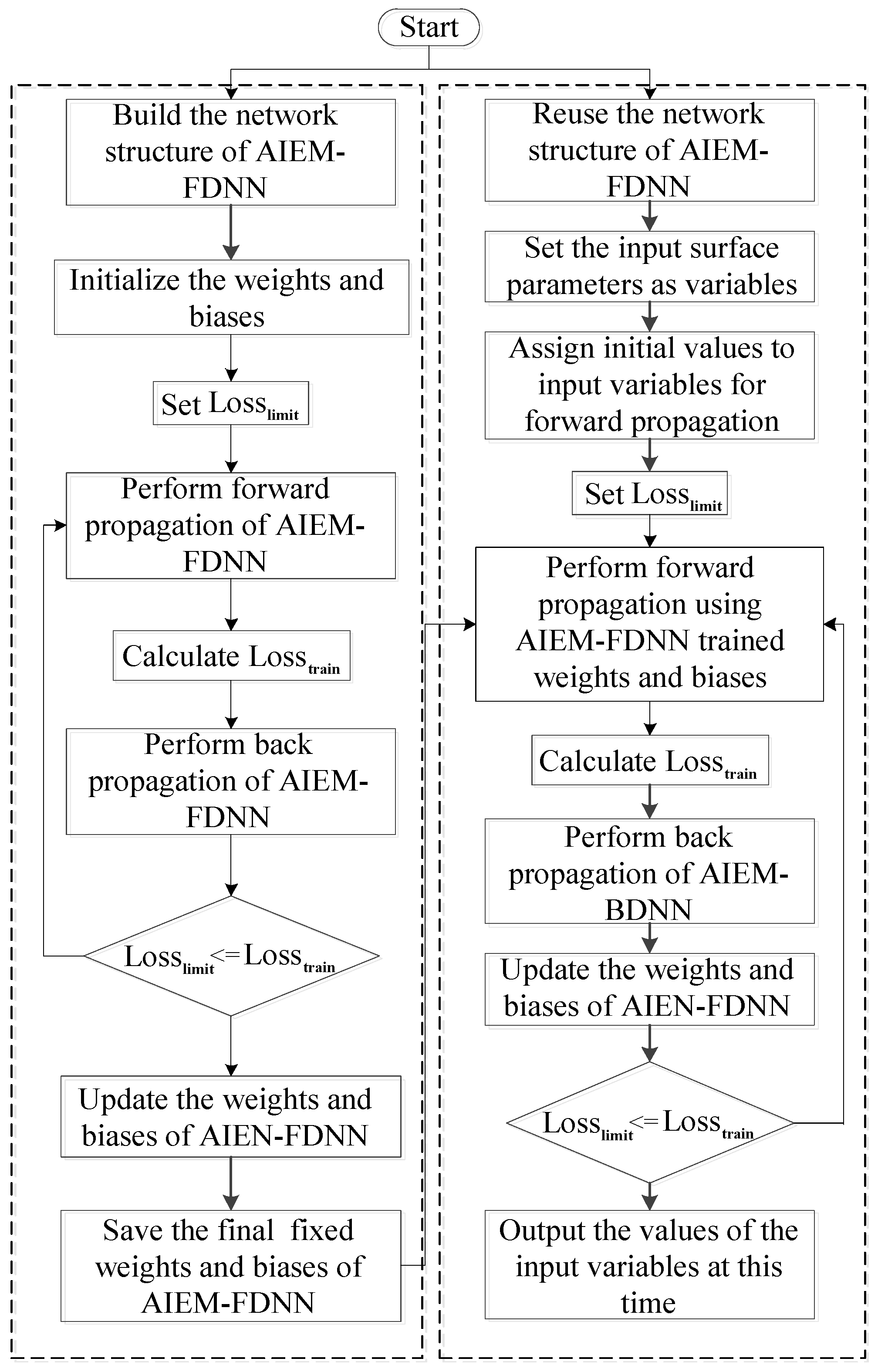
2.2.1. Framework of the Bi-Directional Deep Neural Network
2.2.2. AIEM-Based Forward Deep Neural Network
2.2.3. AIEM-Based Backward Deep Neural Network
3. Results
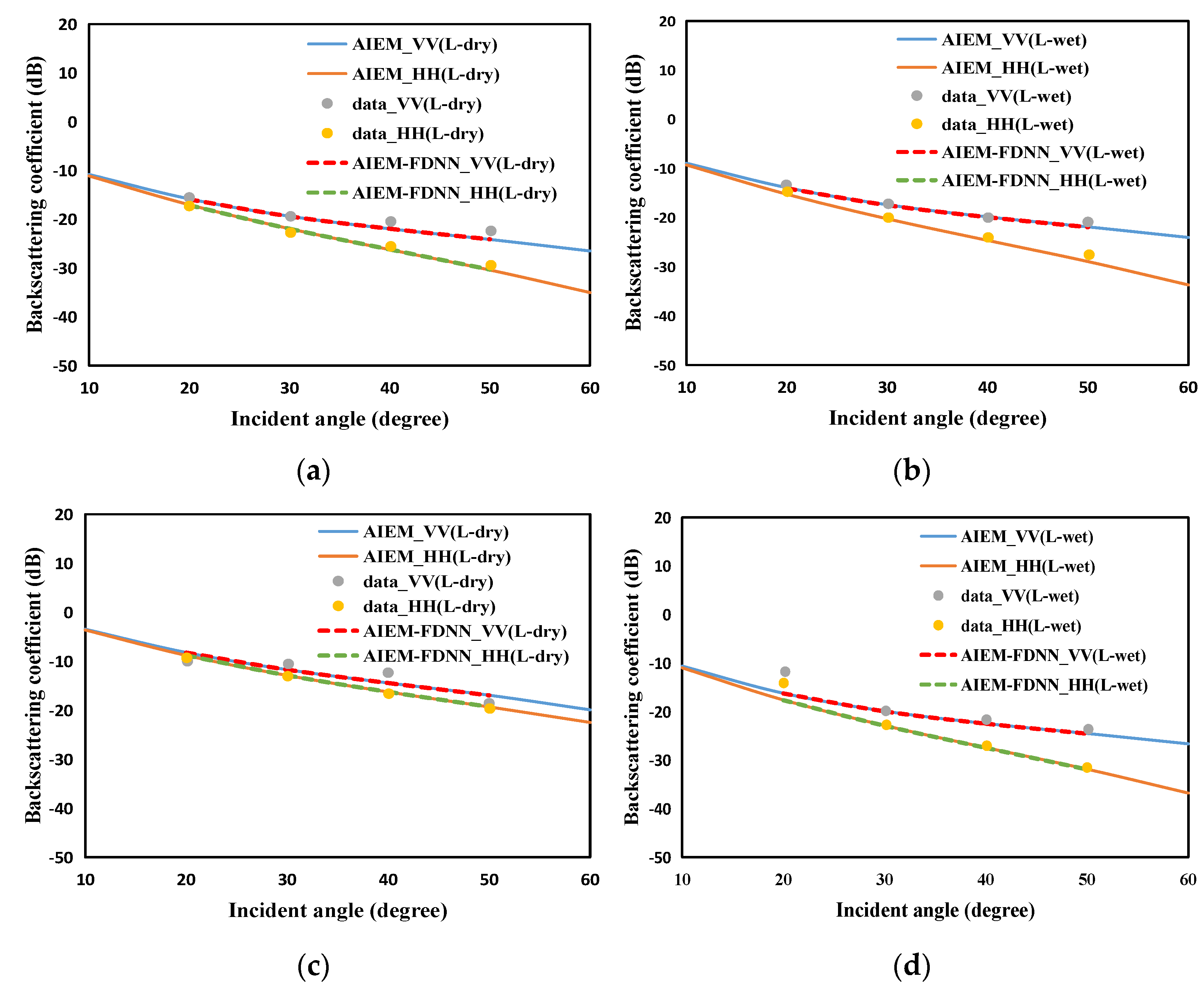
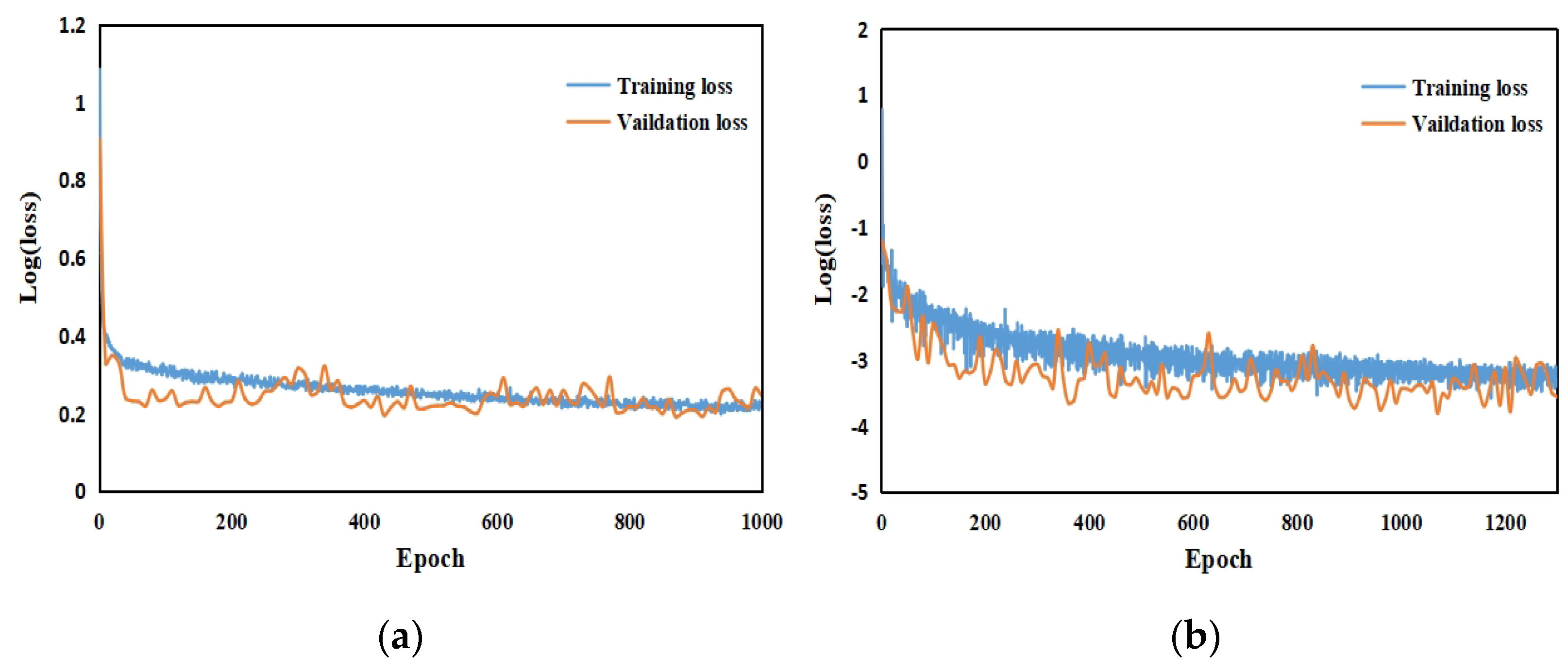
3.1. Performance of the AIEM-Based Forward Deep Neural Network
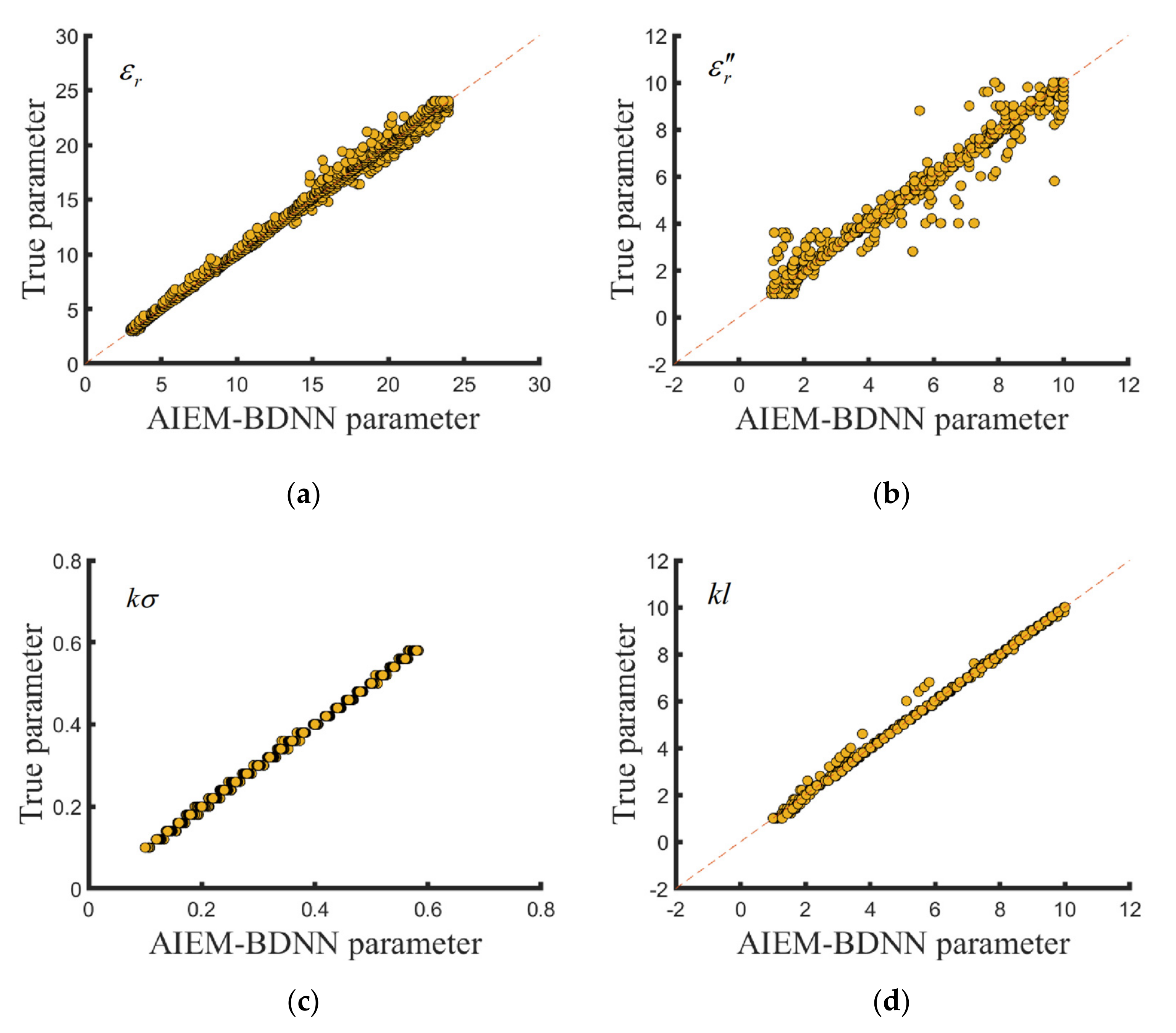
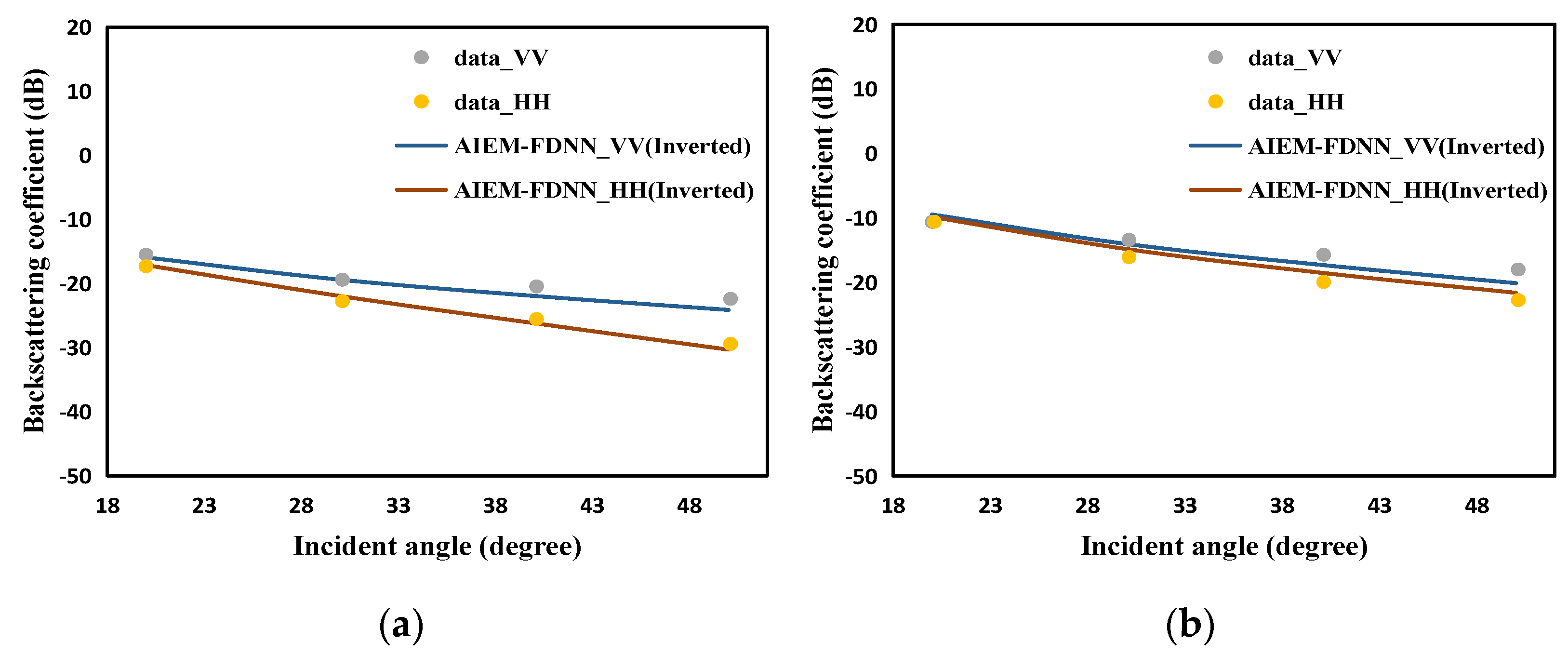
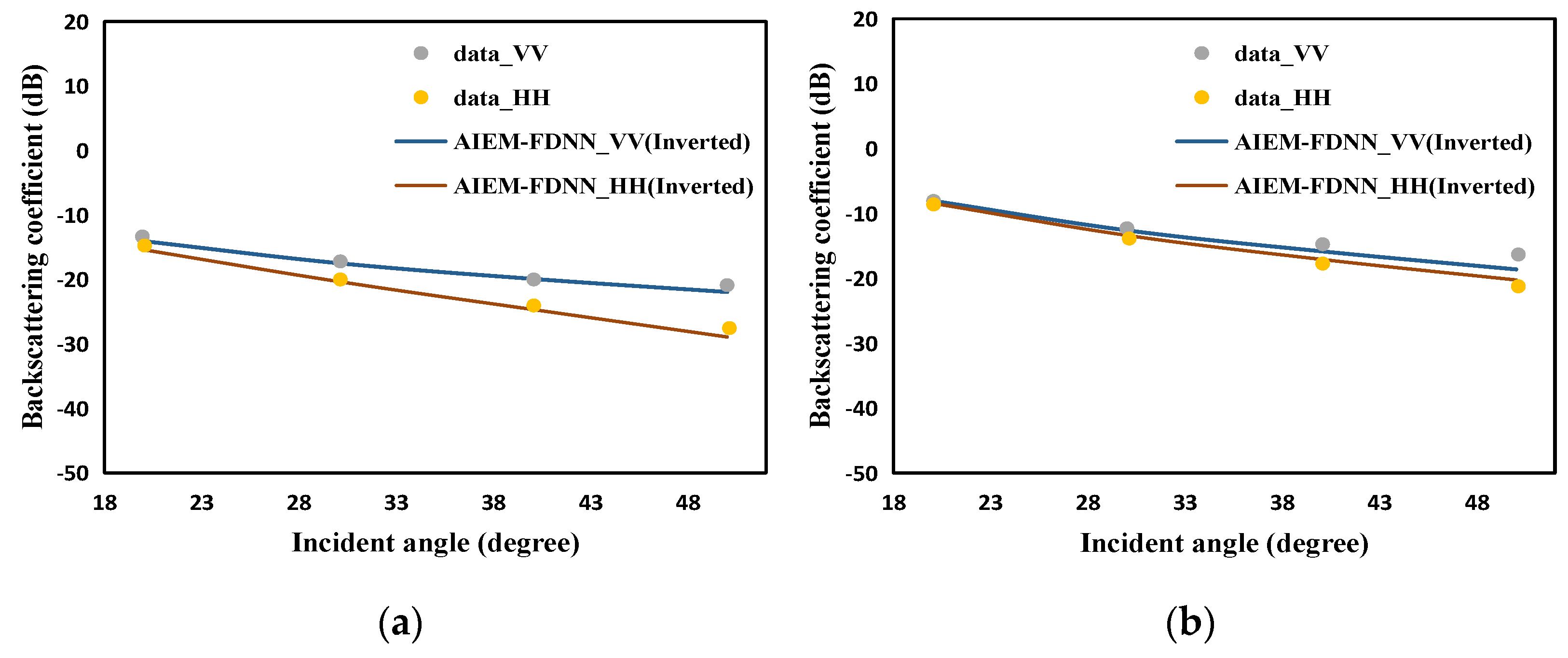
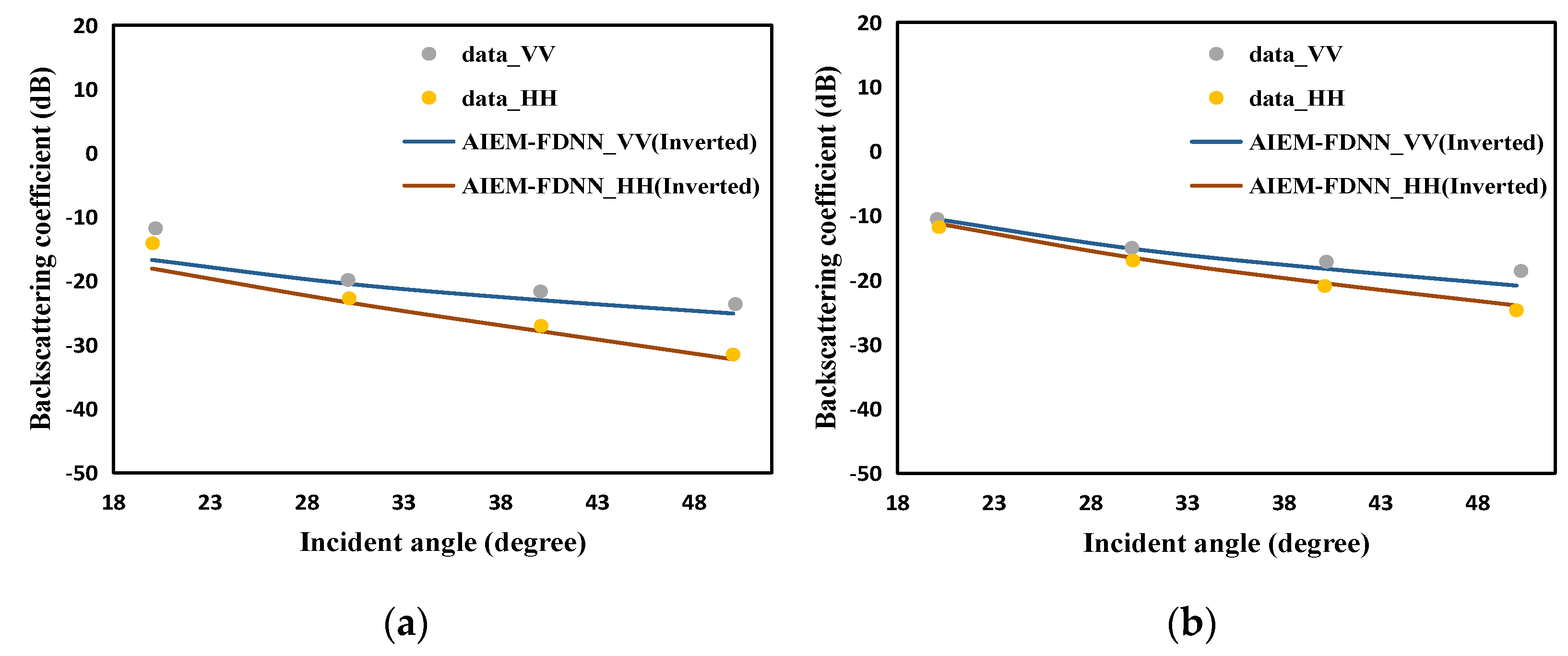
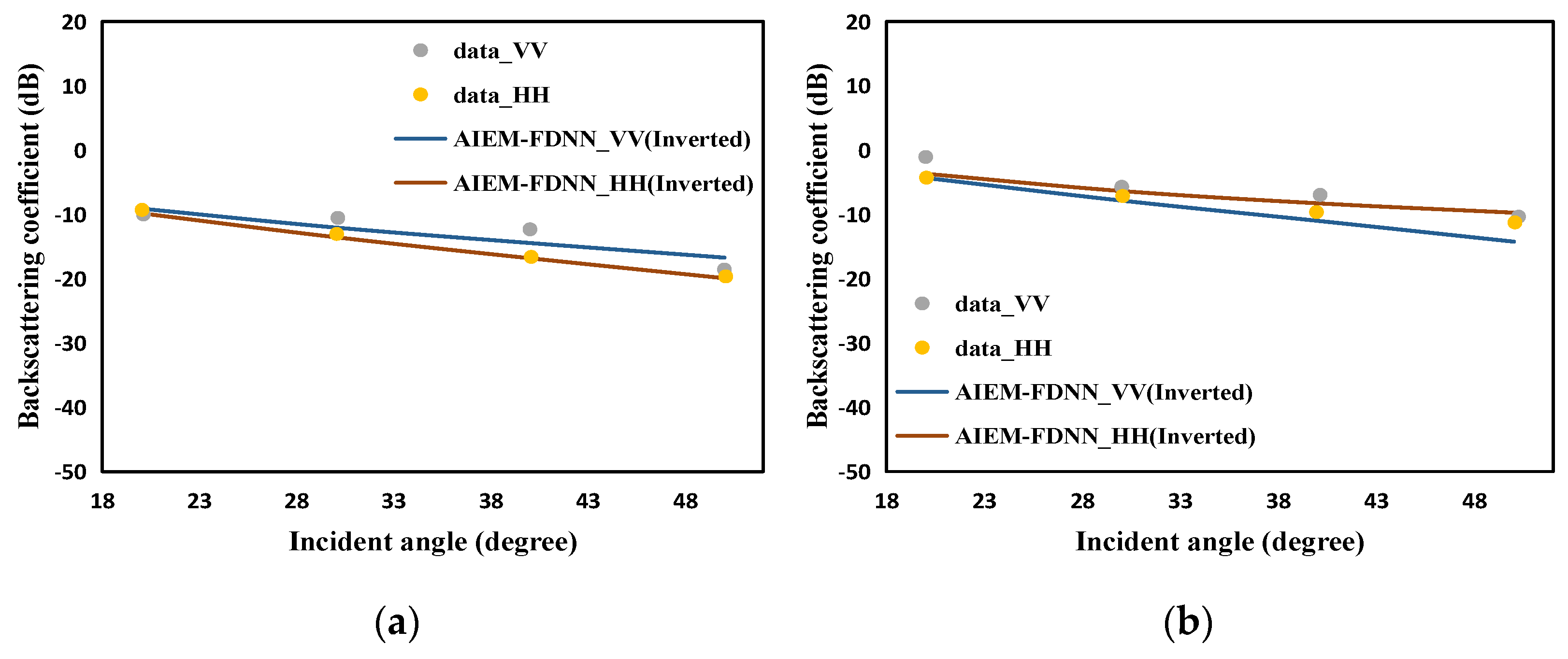
3.2. Performance of the AIEM-Based Backward Deep Neural Network
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
| Algorithm A1: Bi-directional Deep Neural Network |
| Input: The input surface parameters and , the true backscattering coefficients , the maximum epoch I, the weights matrix and , the bias vector and , the nonlinear activation function , the loss function MSE, the learning rate 1: initialize and 2: for j = 1; j ≤ I do |
| 3: |
| 4: |
| 5: |
| 6: , |
| 7: if convergence then |
| 8: break loop |
| 9: end if |
| 10: j = j + 1 |
| 11: end for |
| 12: return and |
| 13: Initialize |
| 14: for k = 1; k ≤ I do |
| 15: |
| 16: |
| 17: |
| 18: |
| 19: if convergence then |
| 20: break loop |
| 21: end if |
| 22: k = k + 1 |
| 23: end for |
| 24: return |
| Output: Inversion results |
References
- Mohammad, H.M.; Amir, A.; Hamid, S.S. Substitution of satellite-based land surface temperature defective data using GSP method. Adv. Space Res. 2021, 67, 3106–3124. [Google Scholar]
- Kim, Y.; Jackson, T.; Bindlish, R.; Lee, H.; Hong, S. Monitoring soybean growth using L-, C- and X-band scatterometer data. Int. J. Remote Sens. 2013, 34, 4069–4082. [Google Scholar] [CrossRef]
- Yang, H.; Guo, H.D.; Wang, C.L.; Li, X.W.; Yue, H.Y. Polarimetric SAR surface parameters inversion based on network. J. Remote Sens. 2002, 6, 451–455. [Google Scholar]
- Shen, X.; Mao, K.; Qin, Q.; Hong, Y.; Zhang, G. Bare surface soil moisture estimation using double-angle and dual-polarization L-band radar data. IEEE Trans. Geosci. Remote Sens. 2013, 51, 3931–3942. [Google Scholar] [CrossRef]
- Chiang, C.Y.; Chen, K.S.; Yang, Y.; Wang, S.Y. Computation of backscattered fields in polarimetric SAR imaging simulation of complex targets. IEEE Trans. Geosci. Remote Sens. 2022, 60, 2004113. [Google Scholar] [CrossRef]
- Sancer, M. Modified Beckmann-Kirchhoff scattering model for rough surface with large incident and scattering angles. Opt. Eng. 2007, 46, 078002. [Google Scholar]
- Thorsos, E.I. The validity of the perturbation approximation for rough surface scattering using a Gaussian roughness spectrum. Acoust. Soc. Am. 1989, 86, 261–277. [Google Scholar] [CrossRef]
- Soto-Crespo, J.M.; VesPerinas, M.N.; Friberg, A.T. Scattering from slightly rough random surfaces: A detailed study on the validity of the small perturbation method. J. Opt. Soc. Am. A 1990, 7, 1185–12017. [Google Scholar] [CrossRef] [Green Version]
- Gilbert, M.S.; Johnson, M.S. A study of the higher-order small-slope approximation for scattering from a Gaussian rough surface. Waves Random Media 2003, 13, 137–149. [Google Scholar] [CrossRef]
- Berginc, G.; Bourrely, C. The small-slope approximation method applied to a three-dimensional slab with rough boundaries. Prog. Electromagn. Res. 2007, 73, 131–211. [Google Scholar] [CrossRef] [Green Version]
- Xu, F.; Jin, Y.Q. Imaging simulation of po-larimetric SAR for a comprehensive terrain scene using the mapping and projection algorithm. IEEE Trans. Geosci. Remote Sens. 2006, 44, 3219–3234. [Google Scholar] [CrossRef]
- Zeng, J.Y.; Chen, K.S.; Bi, H.Y.; Zhao, T.J.; Yang, X.F. A comprehensive analysis of rough soil surface scattering and emission predicted by AIEM with comparison to numerical simulations and experimental measurements. IEEE Trans. Geosci. Remote Sens. 2017, 55, 1696–1708. [Google Scholar] [CrossRef]
- Chen, K.S.; Wu, T.D.; Tsang, L.; Li, Q.; Shi, J.; Fung, A.K. Emission of rough surfaces calculated by the integral equation method with comparison to three-dimensional moment method simulations. IEEE Trans. Geosci. Remote Sens. 2003, 41, 90–101. [Google Scholar] [CrossRef]
- Ulaby, F.T.; Sarabandi, K.; Mcdonald, K.Y.L.E.; Whitt, M.; Dobson, M.C. Michigan microwave canopy scattering model. Int. J. Remote Sens. 1990, 11, 1223–1253. [Google Scholar] [CrossRef]
- Dubois, P.; Van Zyl, J.; Engman, T. Measuring soil moisture with imaging radars. IEEE Trans. Geosci. Remote Sens. 1995, 33, 915–926. [Google Scholar] [CrossRef] [Green Version]
- Oh, Y. Quantitative retrieval of soil moisture content and surface roughness from multipolarized radar observations of bere soil surfaces. IEEE Trans. Geosci. Remote Sens. 2004, 42, 596–601. [Google Scholar] [CrossRef]
- Zhao, S.T. Inverse calculation of hydrogeological parameters in Henan based on improved genetic algorithm. Ground Water 2019, 41, 77–79. [Google Scholar]
- Wang, L.X.; Wang, A.Q.; Huan, Z.X. Parameter inversion of rough surface optimization based on multiple algorithms for SVM. Chin. J. Comput. Phys. 2019, 36, 577–585. [Google Scholar]
- Peurifoy, J.; Shen, Y.; Jing, L.; Yang, Y.; Cano-Renteria, F.; DeLacy, B.G.; Joannopoulos, J.D.; Tegmark, M.; Soljačić, M. Nanophotonic particle simulation and inverse design using artificial neural networks. Sci. Adv. 2018, 4, eaar4206. [Google Scholar] [CrossRef] [Green Version]
- Li, G.; Li, X.Z.; Liu, D.J.; Wang, L.H.; Yu, Z.F. A bidirectional deep neural network for accurate silicon color design. Adv. Mater. 2019, 31, 1905467. [Google Scholar]
- Xu, F.; Wang, H.P.; Jin, Y.Q. Deep learning as applied in SAR target recognition and terrain classification. J. Radars 2017, 6, 136–148. [Google Scholar]
- Sharifzadeh, F.; Akbarizadeh, G.; Kavian, Y.S. Ship classification in SAR images using a new hybrid CNN-MLP classifier. J. Indian Soc. Remote Sens. 2019, 47, 551–562. [Google Scholar] [CrossRef]
- Ding, J.; Chen, B.; Liu, H.W.; Huang, M.Y. Convolutional Neural Network with Data Augmentation for SAR Target Recognition. IEEE Geosci. Remote Sens. Lett. 2016, 13, 364–368. [Google Scholar] [CrossRef]
- Niu, S.R.; Qiu, X.L.; Lei, B.; Ding, C.B.; Fu, K. Parameter extraction based on deep neural network for SAR target simulation. IEEE Trans. Geosci. Remote Sens. 2020, 58, 4901–4914. [Google Scholar] [CrossRef]
- Oh, Y.; Sarabandi, K.; Ulaby, F.T. An empirical model and inversion technique for radar scattering from bare soil surfaces. IEEE Trans. Geosci. Remote Sens. 1992, 30, 370–381. [Google Scholar] [CrossRef]
- Yang, Y.; Chen, K.S.; Shang, G.F. Surface parameters retrieval from fully bistatic radar scattering data. Remote Sens. 2019, 11, 596. [Google Scholar] [CrossRef] [Green Version]
- Chen, K.S. Radar Scattering and Imaging of Rough Surfaces, 1st ed.; CRC Press: Boca Raton, FL, USA, 2021; pp. 160–163. [Google Scholar]
- Yang, Y.; Chen, K.S.; Tsang, L.; Yu, L. Depolarized backscattering of rough surface by AIEM model. IEEE J. Sel. Top. Appl. Earth Sci. Remote Sens. 2017, 10, 4740–4752. [Google Scholar] [CrossRef]
- Zhang, Y.Y.; Wu, Z.S.; Zhang, Y.S. The effective permittivity and roughness parameters inversion by the land backscattering measured data. Chin. J. Radio Sci. 2016, 31, 79–84. [Google Scholar]
- So, S.; Badloe, T.; Noh, J.; Bravo-Abad, J.; Rho, J. Deep learning enable inverse design in nanophotonics. Nanophotonics 2020, 9, 1041–1057. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Li, X.Z.; Wu, Q.X.; Wang, L.H.; Li, G. Neural network enabled metasurface design for phase manipulation. Opt. Express 2021, 29, 2521–2528. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Surface Number | Freq. (GHz) | ||||||
|---|---|---|---|---|---|---|---|
| S1-dry | 1.5 GHz | 0.13 | 2.6 | 0.40 | 8.4 | 7.99 | 2.02 |
| 4.75 GHz | 0.4 | 8.4 | 8.77 | 1.04 | |||
| S1-wet | 1.5 GHz | 0.13 | 2.6 | 15.57 | 3.71 | ||
| 4.75 GHz | 0.4 | 8.4 | 15.42 | 2.15 | |||
| S2-dry | 1.5 GHz | 0.1 | 3.1 | 0.32 | 9.9 | 5.85 | 1.46 |
| 4.75 GHz | 0.32 | 9.8 | 6.66 | 0.68 | |||
| S2-wet | 1.5 GHz | 0.1 | 3.1 | 14.43 | 3.47 | ||
| 4.75 GHz | 0.32 | 9.8 | 14.47 | 1.99 | |||
| S3-dry | 1.5 GHz | 0.35 | 2.6 | 1.12 | 8.4 | 7.70 | 1.95 |
| 4.75 GHz | 1.11 | 8.4 | 8.50 | 1.00 | |||
| S3-wet | 1.5 GHz | 0.35 | 2.6 | 15.34 | 3.66 | ||
| 4.75 GHz | 1.11 | 8.4 | 15.23 | 2.12 |
| Parameter | Value |
|---|---|
| Real part of the dielectric constant) | 2–26 |
| Imaginary part of the dielectric constant) | 0.1–10.1 |
| Normalized root mean square height) | 0.1–1 |
| Normalized relative lenght) | 1–10.8 |
| Range of incident angle) | |
| Polarization mode | HH, VV |
| 0.01–0.5 | |
| 0–0.5 | |
| Surface roughness spectrum (S) | Exponential |
| Parameter | Value |
|---|---|
| Weight initialization method | Uniform distribution initialization |
| Activation function | ReLU |
| Loss function | MSE |
| Optimizer | Adam |
| Learning rate | 0.001 |
| Learning decay rate | 0.9 |
| Hidden layers | 4 |
| Hidden neurons | 300 |
| Epoch | 1300 |
| Batch size | 20 |
| Polarization | RMSE | |
|---|---|---|
| VV | 20° | 0.1055% |
| VV | 30° | 0.0585% |
| VV | 40° | 0.0557% |
| VV | 50° | 0.0708% |
| HH | 20° | 0.0905% |
| HH | 30° | 0.0589% |
| HH | 40° | 0.0661% |
| HH | 50° | 0.0655% |
| Parameter | Value |
|---|---|
| Input value initialization method | Xavier Initialization |
| Activation function | ReLU |
| Loss function | MSE |
| Optimizer | RAdam |
| Learning rate | 0.001 |
| Learning decay rate | 0.9 |
| Hidden layers | 4 |
| Hidden neurons | 300 |
| Epoch | 10,000 |
| Parameter | RMSE | Similarity(1-RMSE) |
|---|---|---|
| 0.0244 | 97.56% | |
| 0.0886 | 91.14% | |
| 0.0096 | 99.04% | |
| 0.0155 | 98.45% |
| Surface Number | POLARSCAT (Measured) | AIEM-BDNN (Inverted) | ||||||
|---|---|---|---|---|---|---|---|---|
| S1-dry | 7.99 | 2.02 | 0.13 | 2.6 | 9.07 | 1.23 | 0.13 | 2.81 |
| 8.77 | 1.04 | 0.40 | 8.4 | 9.33 | 1.19 | 0.40 | 8.49 | |
| S1-wet | 15.57 | 3.71 | 0.13 | 2.6 | 15.19 | 4.09 | 0.13 | 2.79 |
| 15.42 | 2.15 | 0.40 | 8.4 | 16.00 | 0.36 | 0.40 | 8.44 | |
| S2-dry | 5.85 | 1.46 | 0.10 | 3.1 | 3.02 | 2.96 | 0.16 | 1.29 |
| 6.66 | 0.68 | 0.32 | 9.8 | 3.23 | 0.95 | 0.36 | 1.00 | |
| S2-wet | 14.43 | 3.47 | 0.10 | 3.1 | 10.58 | 5.43 | 0.10 | 3.09 |
| 14.47 | 1.99 | 0.32 | 9.8 | 14.91 | 1.63 | 0.32 | 9.88 | |
| S3-dry | 7.7 | 1.95 | 0.35 | 2.6 | 7.41 | 2.53 | 0.31 | 1.89 |
| 8.5 | 1.00 | 1.11 | 8.4 | 9.34 | 0.42 | 0.99 | 6.66 | |
| S3-wet | 15.34 | 3.66 | 0.35 | 2.6 | 20.79 | 4.49 | 0.32 | 1.04 |
| 15.23 | 2.12 | 1.11 | 8.4 | 15.00 | 4.58 | 0.99 | 8.86 | |
| RMSE | 2.36 | 1.21 | 0.055 | 2.69 | ||||
| nRMSE | 0.1328 | 0.2386 | 0.0617 | 0.3029 | ||||
| Bi-Directional DNN | BP | |||
|---|---|---|---|---|
| Parameter | RMSE | Similarity (1-RMSE) | RMSE | Similarity (1-RMSE) |
| 0.0244 | 97.56% | 0.0528 | 94.72% | |
| 0.0886 | 91.14% | 0.4948 | 50.52% | |
| 0.0096 | 99.04% | 0.0457 | 95.43% | |
| 0.0155 | 98.45% | 0.0374 | 96.26% | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; He, Z.; Yang, Y.; Ding, D.; Ding, F.; Dang, X.-W. Multi-Parameter Inversion of AIEM by Using Bi-Directional Deep Neural Network. Remote Sens. 2022, 14, 3302. https://doi.org/10.3390/rs14143302
Wang Y, He Z, Yang Y, Ding D, Ding F, Dang X-W. Multi-Parameter Inversion of AIEM by Using Bi-Directional Deep Neural Network. Remote Sensing. 2022; 14(14):3302. https://doi.org/10.3390/rs14143302
Chicago/Turabian StyleWang, Yu, Zi He, Ying Yang, Dazhi Ding, Fan Ding, and Xun-Wang Dang. 2022. "Multi-Parameter Inversion of AIEM by Using Bi-Directional Deep Neural Network" Remote Sensing 14, no. 14: 3302. https://doi.org/10.3390/rs14143302