1. Introduction
Tree species information is an important indicator for describing the biodiversity of forest ecosystems [
1,
2,
3]. Accurate tree species identification plays an important role in managing forest resources, monitoring forest competition, assessing stand health, and valuing ecological benefits [
4]. Manual field survey for individual tree species identification is usually an accurate and reliable method [
5], however it is time consuming, costly, and does not allow for large-scale forest species identification [
6,
7]. Unmanned aerial vehicles (UAV) remote sensing technology, with its characteristics of flexibility, efficiency and convenience [
8], provides a new means of identifying tree species and obtaining information on the distribution of tree species in large areas of forests [
9]. The technology can be equipped with a variety of sensors (such as high-resolution cameras, multispectral or hyperspectral sensors, and Light Detection and Ranging (LiDAR) to obtain a wealth of multi-source remote sensing data. Multi/hyperspectral data, characterized by the integration of maps and spectra [
10,
11], provide a wealth of spatial, radiometric, and spectral information for forest species identification and remain a favorite alternative for describing forest canopy information [
12]. However, multi/hyperspectral data cannot penetrate the canopy and accurate acquisition of individual tree information remains a serious challenge for complex forest canopy situations, such as different canopy sizes, overlapping canopies, and confusion between canopy and background.
Unlike multispectral and hyperspectral, LiDAR sensors acquire three-dimensional point cloud information and vertical structure information of the forest by emitting high-frequency pulses from laser transmitters [
13]. Researches on forestry applications of LiDAR data have focused on individual tree segmentation [
14,
15,
16] and forest structure parameter extraction such as stand height, crown width, and biomass [
17,
18,
19]. Some researchers have also used height as well as intensity information from LiDAR data for tree species classification [
20,
21].
In the past decades, machine learning methods such as Support Vector Machines (SVM) [
22,
23,
24], Random Forests (RF) [
25,
26], and Artificial Neural Networks have been widely used in the field of tree species classification and identification [
27]. Among them, SVM has become the mainstream method in forest tree species classification [
23]. However, SVM is over-reliant on the choice of kernel functions and optimal parameters, and has low generalization ability. Therefore, some researchers have attempted to carry out studies on tree species classification and identification, taking advantage of deep learning techniques in feature extraction. Hamraz et al. [
16] uses deep convolutional neural networks to classify needles and deciduous leaves from single tree data obtained by segmentation based on airborne LiDAR data. Hu et al. [
28] proposed a method combining convolutional neural networks, convolutional generative adversarial networks (CGANs), and AdaBoost classifiers to identify diseased pine trees using red, green, and blue (RGB) drone images, with a recall of 95%. Zhang et al. [
10] used an improved three-dimensional convolutional neural network (3D-1D CNN) tree species classification model based on hyperspectral data to achieve short time, large area, and high accuracy classification mapping of multiple tree species in complex terrain at the forest stand scale.
Current researches on tree species classification usually focus on stand and regional scales [
28], and most of the tree species identification at the individual tree scale is obtained by a two-step operation combining the classification results of stand classification and the results of individual tree crown segmentation [
11,
16]. However, in the complex forest environment, the generalization performance of these methods is poor, and the accuracy is relatively low.
With further developments in deep learning, researchers have developed an advanced instance segmentation model named the Mask region-based convolution neural network (Mask R-CNN), which integrates the core tasks of target detection and semantic segmentation to identify the boundaries of target objects precisely at the pixel level, enabling end-to-end training [
29]. Mask R-CNN had made progress in the recognition of targets using high spatial resolution images [
30,
31]. For example, Wang et al. [
30] proposed an automatic extraction algorithm using Mask R-CNN based on multispectral images and achieved crop identification with relatively high accuracy. Zhang et al. [
31] proposed an improved Mask R-CNN model for individual tree segmentation and recognition from UAV images with an accuracy of more than 75%. The above methods are based on a single data source and use the idea of sharp changes in the grey scale values of the canopy edges for target object recognition, which has achieved good results in simple and less heterogeneous environments. However, there are more uncertainties in the results in forest environments with high densities, irregular canopy boundaries, and mutual shading [
32]. The vertical structure information obtained from LiDAR data is a useful complement to individual tree crown extraction, however, the basic backbone networks of Mask R-CNN (e.g., ResNet50, ResNet101) cannot selectively utilize the unique deep features from each of the multiple data sources [
29]. In addition, the cross-entropy loss function ignores the prediction loss of the boundary in the segmentation task, which reduces the accuracy of the segmentation boundary [
31]. Therefore, how to fuse the spectral information provided by high spatial resolution image data and the vertical structure information provided by LiDAR data to achieve end-to-end individual tree species classification is an urgent problem needing to be solved [
33,
34].
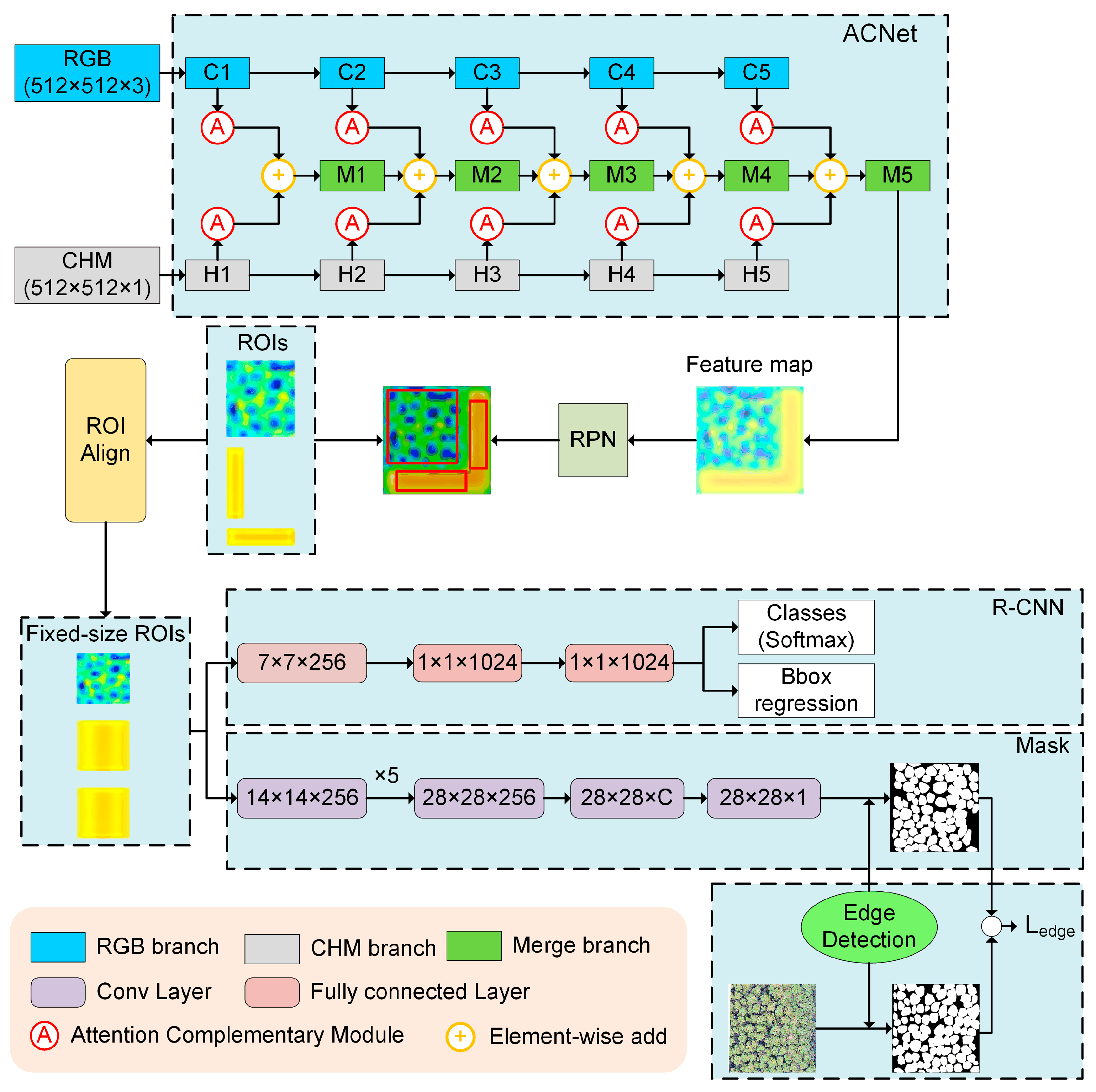
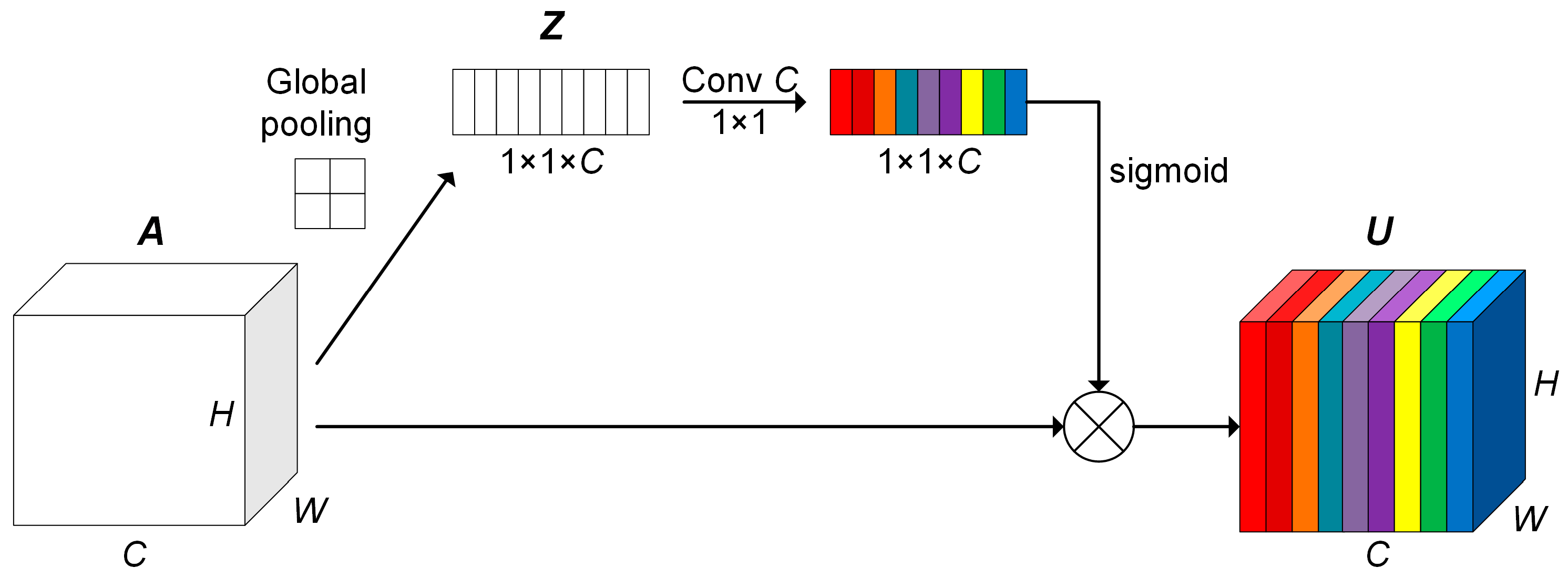
Here, we design an improved Mask R-CNN network named the attention complementary network (ACNet) and edge detection R-CNN (ACE R-CNN) for individual tree species identification in complex forest environments using UAV RGB images and LiDAR data. Firstly, we propose a backbone network named ACNet to replace the basic backbone of Mask R-CNN, which fuses features extracted from high-resolution RGB images and canopy height model (CHM) data by an attention complementary module (ACM). The features extracted from the RGB and CHM branches are weighted and the weighted features are added to the fusion branch by introducing an attention module that can highlight certain important features. We then propose to add an edge loss function, presenting the loss between the predicted and ground-truth mask contours to the Mask R-CNN loss function to improve the edge accuracy of the crown segmentation. The edge loss is computed by introducing an edge detection filter in the Mask branch. Finally, we evaluate the performance of our proposed ACE R-CNN framework for individual tree species identification with different data input methods, different backbone networks, and different edge detection methods in different subregions composed of different tree species. Our proposed ACE R-CNN framework allows for end-to-end individual tree species identification with fast training speed and high accuracy, which provides a new solution for obtaining individual tree-level tree species distribution information in forest resource surveys.
4. Discussion
In this study, an instance segmentation framework called ACE R-CNN was designed by introducing the ACM and edge loss to realize identification of individual tree species in an end-to-end manner by integrating UAV high-spatial resolution RGB images and LiDAR data. Compared with traditional Mask R-CNN, which uses only RGB data as data input, the addition of CHM data can significantly improve the accuracy of individual tree species identification (
Table 5 and
Table 6). This is due to the fact that CHM can provide the height information of vegetation [
32], which is important for the identification of individual trees and the determination of crown boundary locations.
Our proposed ACNet could better facilitate CHM information as a complement to RGB (
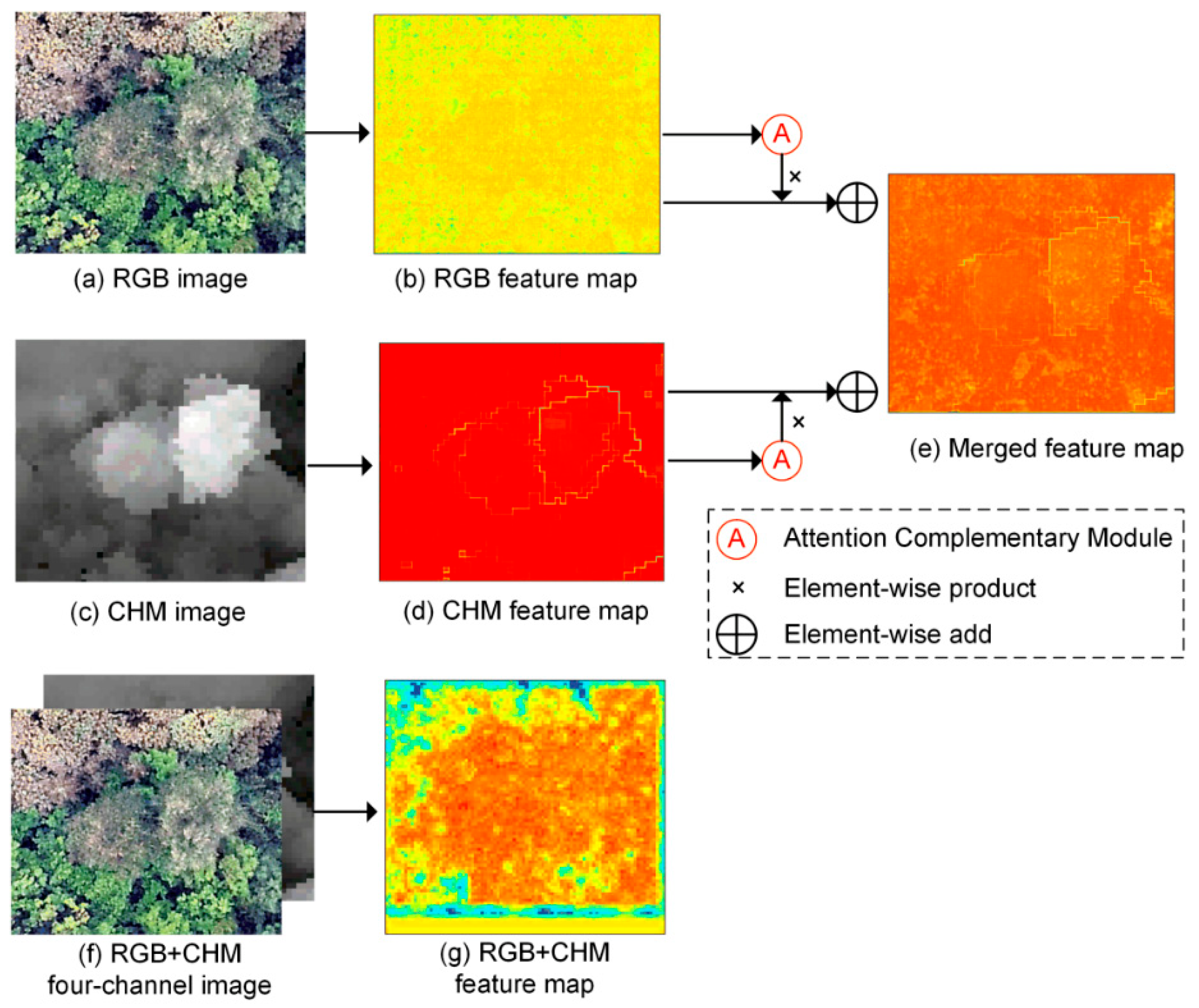
Table 6). This is because ACNet introduced ACM can selectively learn the combination features of each pixel from RGB and CHM, effectively separating vegetation from the ground surface and helping to complete the identification of individual tree species. We compared the differences in feature extraction backbone networks between ACNet and ResNet50-FPN and visualized some of the results of feature extraction for analysis (
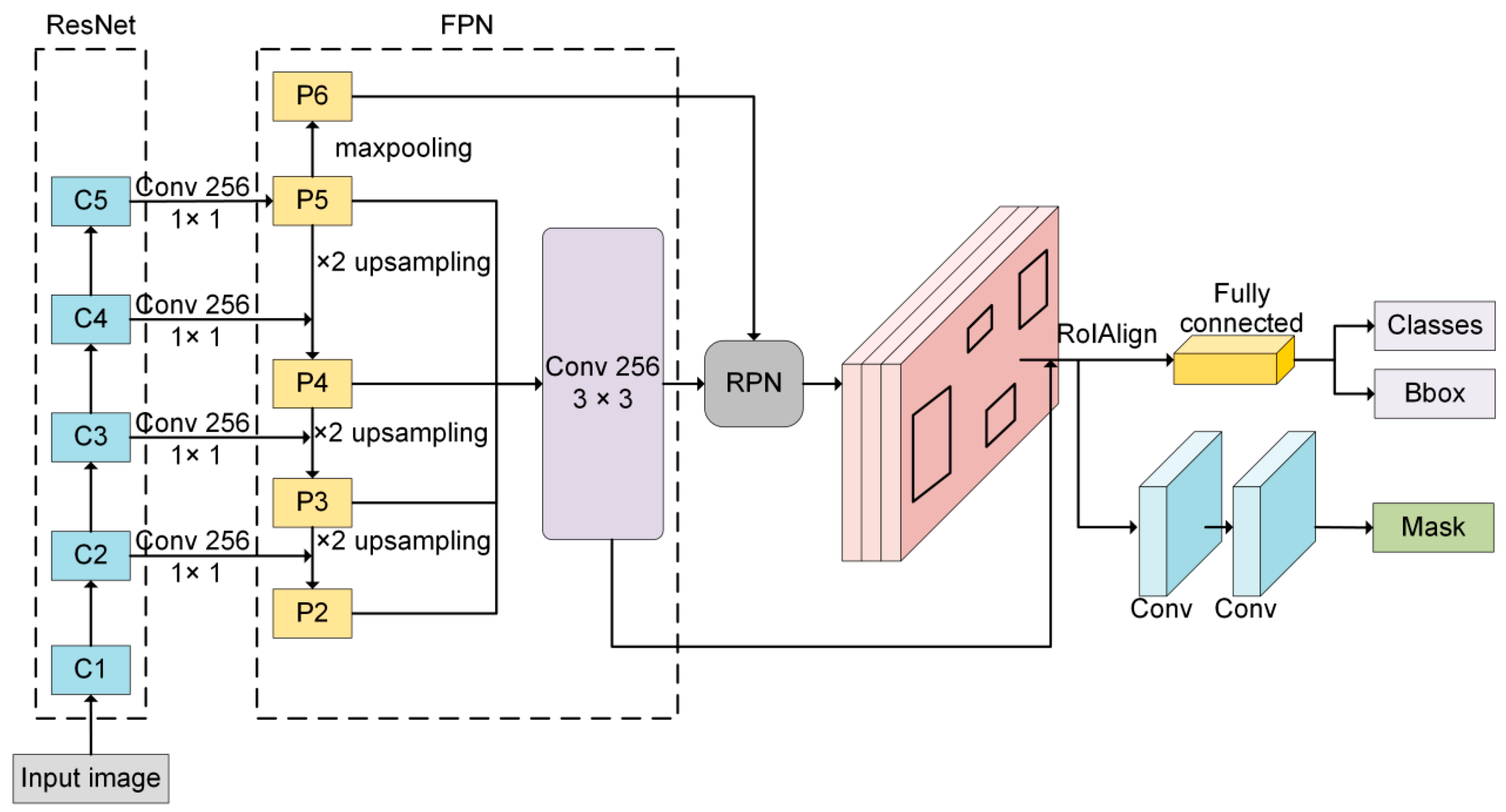
Figure 10). In order to match human vision, we choose low-level features from C-2, H-2, M-2 in ACNet, and C-2 in ResNet50-FPN, respectively (
Figure 3 and
Figure 4). The feature map extracted from the RGB branch (
Figure 10b) contains more effective visual information and focuses on the instance content and its global features. The feature map extracted from the CHM branch (
Figure 10d) focuses more on the crown boundary information. The feature map of the ACNet fusion branch is shown in
Figure 10e. It can be seen that after fusing the features of the two branches, the RGB and CHM information is fully combined, which is beneficial for individual tree information extraction and segmentation. The features (
Figure 10g) extracted by ResNet50-FPN from the four-channel image (
Figure 10f) composed of RGB and CHM are able to express more crown information than the features extracted using only RGB images (
Figure 10b), but the crown boundary information is not prominent, so the performance improvement for segmentation of individual tree instances is limited.
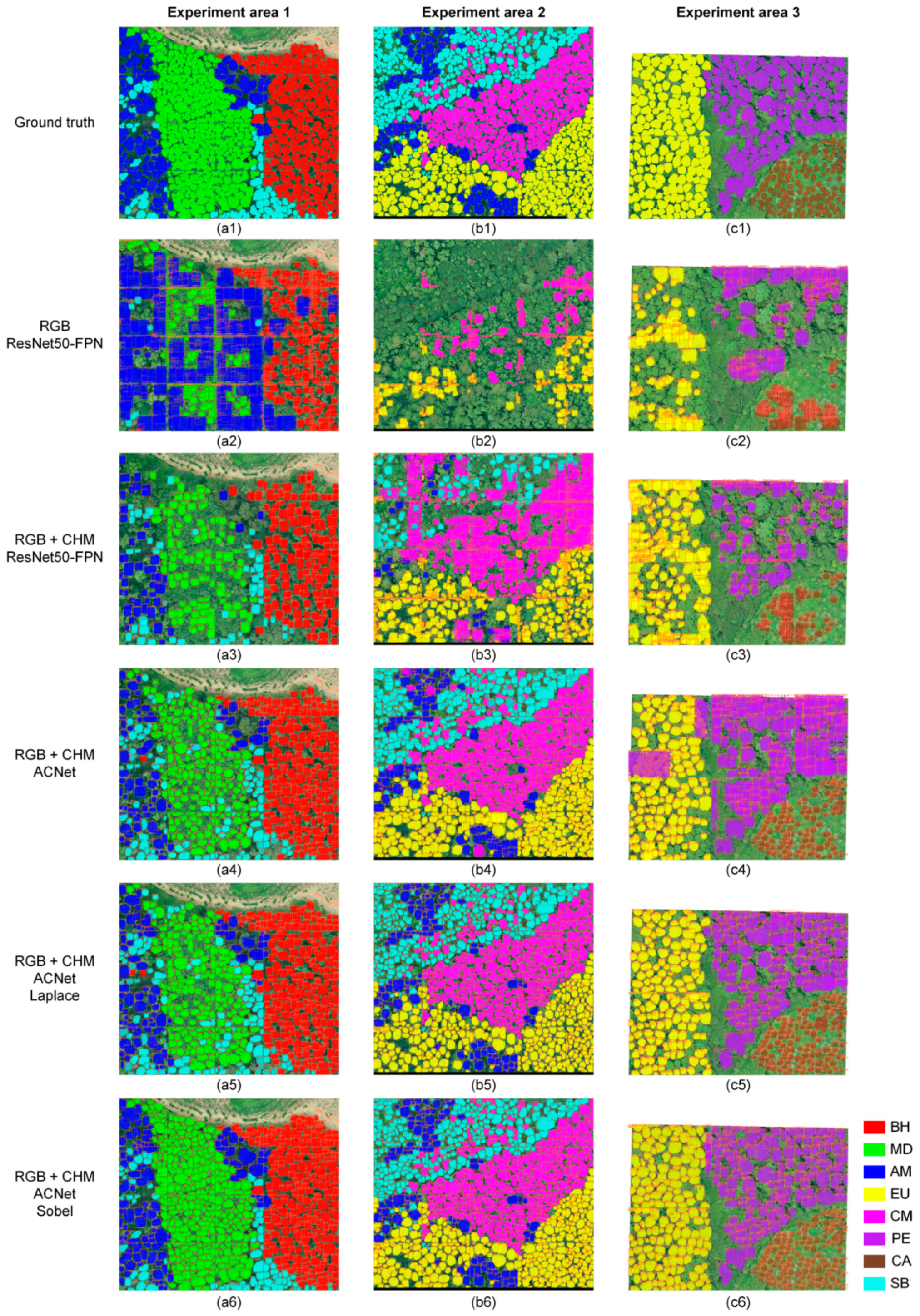
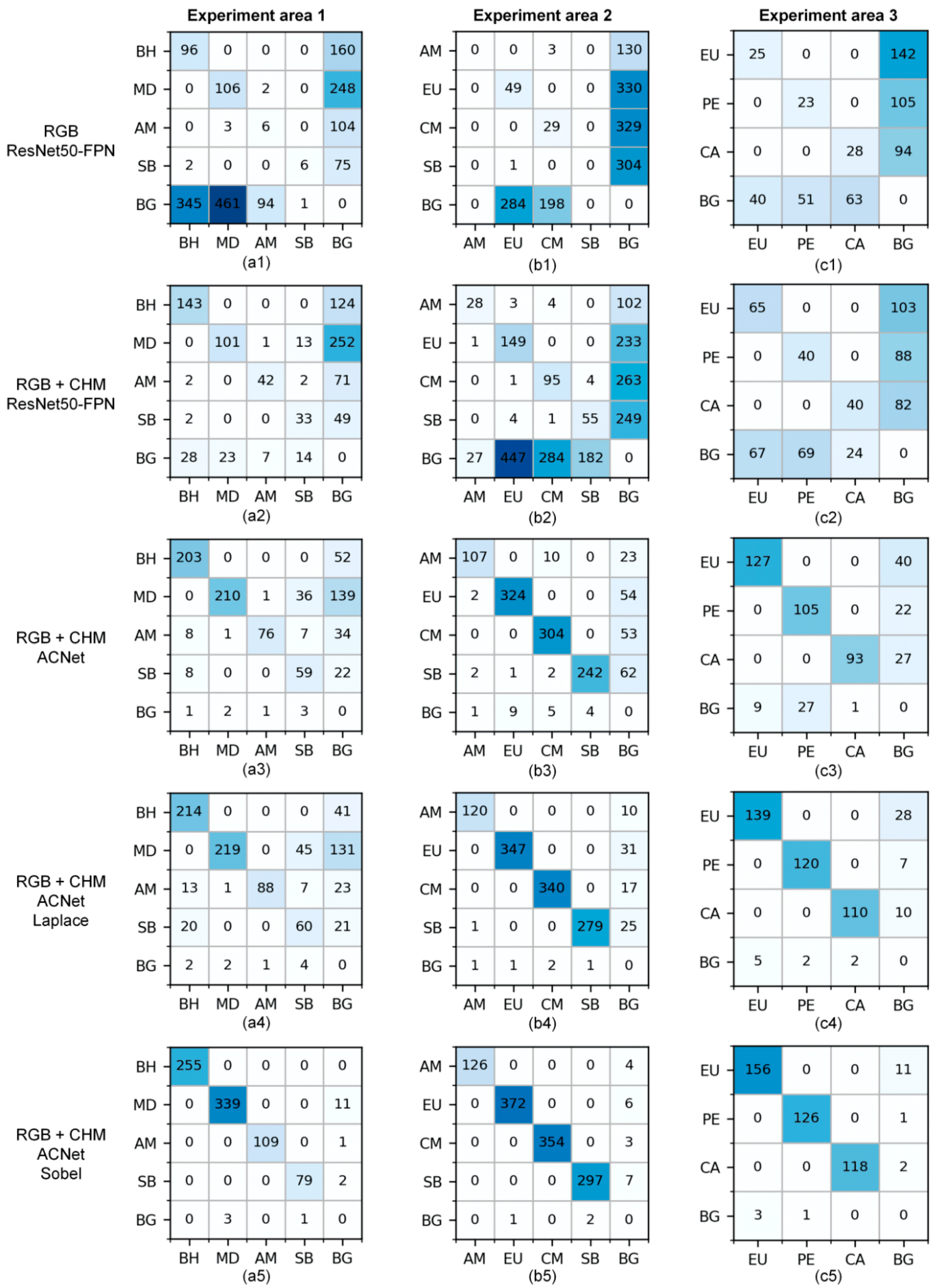
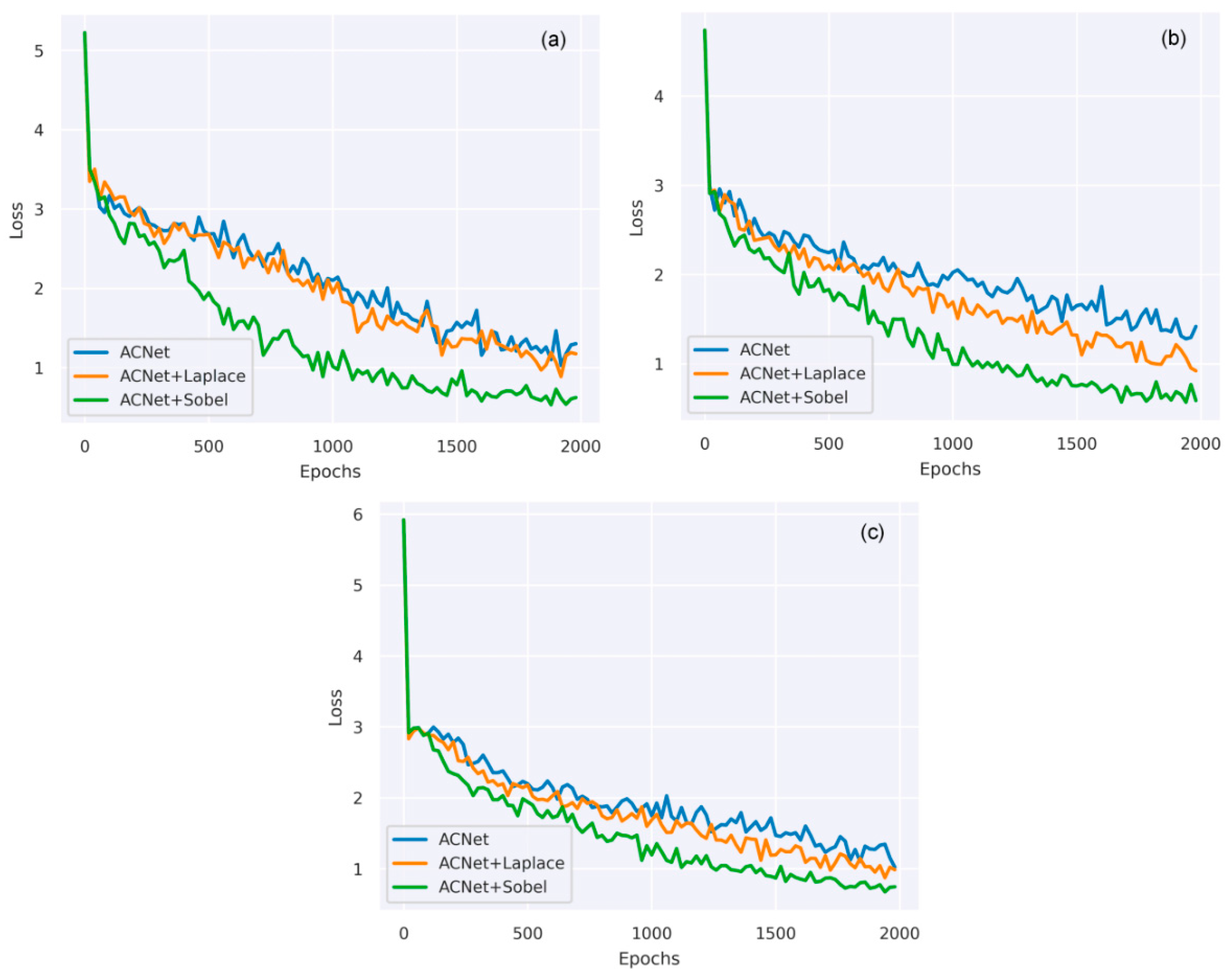
To train the model to have faster speed and improve the training accuracy, we also evaluated the performance of two traditional edge detection filters (Sobel and Laplacian) (
Table 7). The performance of ACE R-CNN with edge detection filters for individual tree species identification was significantly improved (
Figure 7). This can be attributed to the fact that the addition of edge loss promotes the agreement between the predicted and ground-truth mask edges. The Sobel edge detector is superior to the Laplacian edge detector because the Laplacian edge detector is more susceptible to noise and cannot respond to real edges [
48].
It is worth noting that ACE R-CNN uses the spectral information and texture information provided by RGB images for individual tree species identification, and regions with simple tree species composition can achieve better performance (
Table 7). However, the spectral information of RGB images includes only three visible bands, and it is difficult to describe the fine spectral features of the tree crown, which will limit the effect of individual tree species identification in forest environments with complex tree species [
10]. In future study, high spatial resolution hyperspectral images and LiDAR point cloud data can be used to seek higher accuracy of individual tree species identification [
11,
49,
50,
51]. The robustness of the model will be evaluated in areas of more complex natural forests (mixed trees with different species and ages). Furthermore, we will expand the number of samples and balance the proportion of different tree species in dataset [
52,
53]. Overall, our proposed ACE R-CNN architecture can provide a reference for higher accuracy individual tree species identification in high-density and complex forest environments.
5. Conclusions
In this study, we proposed an improved Mask R-CNN instance segmentation algorithm named ACE R-CNN for individual tree species identification integrating UAV high-spatial resolution RGB images and LiDAR data. ACE R-CNN uses a multi-branch attentional architecture backbone network called ACNet, which is able to selectively complement the weighted features extracted from RGB and CHM branches to the fusion branch by introducing ACM. In addition, edge loss is added into the loss function to further improve the edge precision of the segmentation mask. Through different comparative experiments, the results show that, compared with RGB data alone, the combination of RGB and CHM data is more suitable for individual tree species identification. Compared with the ResNet50-FPN backbone network, the ACNet backbone network has better performance in instance segmentation of individual tree species and could significantly improve the identification accuracy of individual tree species. The ACE R-CNN with an edge detection filter can not only further improve the accuracy of individual tree species identification, but also accelerate the convergence rate of errors. The ACE R-CNN with Sobel filter has the best identification result, with a P, R, F1-score, and AP of tree species all higher than 0.9 in the three test areas. It is a low cost, high-speed, and high efficiency solution for individual tree species identification, and achieves high-precision identification of individual tree species under the high canopy density condition. Moreover, it is of great significance for forest management and forest parameter estimations such as biomass and canopy density.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}