1. Introduction
Remote sensing (RS) is capable of collecting information from objects with no physical contact through satellite and aerial-based platforms and is widely applied in geological survey, urban resources management, and disaster monitoring [
1,
2]. To achieve a high performance in the aforementioned applications, an automatic and fast detection method for ground objects with high accuracy in a robust way is desirable. The deep learning method, a pioneering method in remote sensing area that develops rapidly, with high accuracy, robustness, and fast inference speed, is widely used in object detection and classification tasks.
Semantic segmentation, as a method of deep learning, is used to classify pictures at the pixel level. Therefore, this method can describe the information contained in a picture to the greatest extent, including the category, position, and image proportion of each object [
3]. Currently, there are two kinds of models to solve image segmentation problems, one is the convolution neural network (CNN)-based model and the other is the transformer architecture based model. It is acknowledged that, with the increase of training data in the remote sensing area, a CNN-based model will reach a threshold; however, on the contrary, a transformer-based model can continuously improve the performance [
4]. To this end, to segment remote sensing images with massive data, the transformer-based model can realize its full potential.
The remote sensing image segmentation performance is highly related to two factors: the acquisition of spatial information and the establishment of global relations [
5]. Spatial information is also called structural information, referring to the texture, shape and structured information of the image. In CNN structure, spatial information is inevitably damaged because it relies on convolution and pooling operations to extract features and reduce the image resolution [
6].
However, the transformer structure utilizes a serialization process for the image and introduces position embedding to describe the position relationship instead of requiring convolution and pooling operations, and thus the spatial information of the original image can be kept [
7]. Global relation describes the semantic relationship between categories, which can be efficiently established by using attention mechanism.
An attention mechanism is the main component of a transformer structure, which aims to obtain the feature representations through bridging the relationship between each pixel; therefore, global relations are established from beginning to end. However, the vanilla CNN structure does not have an attention mechanism, and, even if the attention mechanism is introduced in CNN, the performance is far weaker than the transformer structure. To this end, the transformer structure outperforms the CNN structure regarding to the acquisition of spatial information and the establishment of global relations. Therefore, the transformer architectures are widely applied in segmentation tasks to replace CNNs.
Vision transformer [
8] is the first transformer architecture in computer vision, outperforming the CNN-based methods in a large margin at image-level classification task. However, it is not adequate for the segmentation task since the decoder (also called segmentation head) is not introduced here. SETR [
9] based on the vision transformer architecture introduces segmentation components and, finally, achieved state-of-the-art performance on the segmentation task.
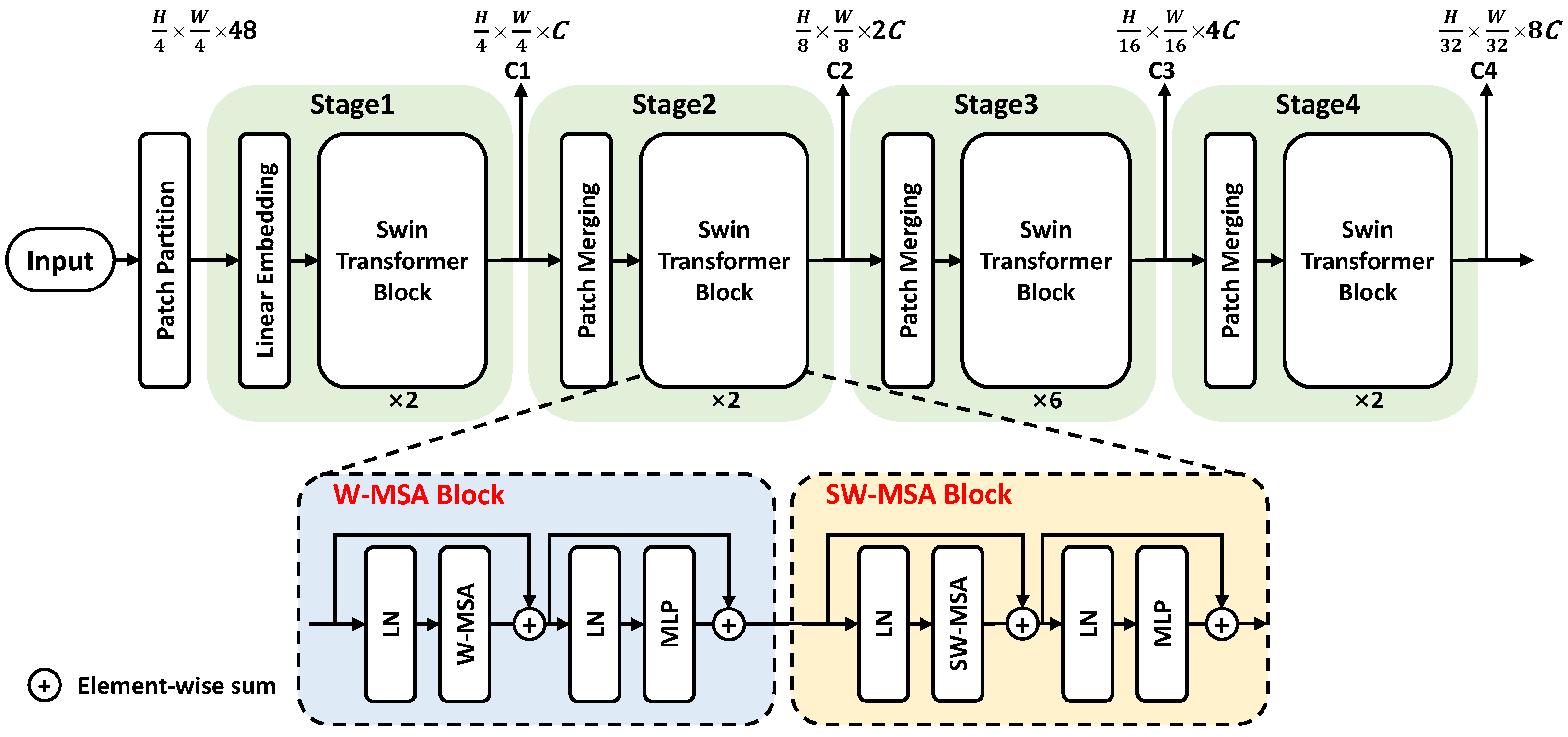
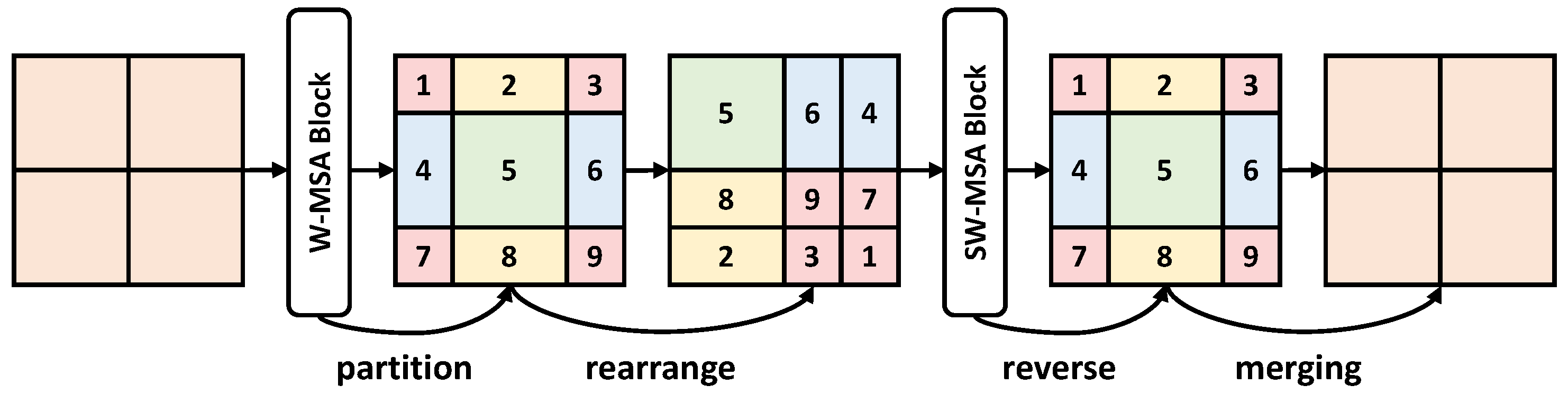
Although SETR explores a feasible way of applying the transformer in the segmentation task, it is inefficient to obtain spatial information and with a high computation load. To cope with the aforementioned drawbacks, we introduce the shifted window transformer (Swin transformer [
10]), which adopts a hierarchical transformer block to obtain multi-scale features, which is useful to obtain spatial information.
Although the Swin transformer has achieved better performance on segmentation tasks compared with basic transformer, there are two main problems to be addressed for the remote sensing image segmentation task. First, high efficiency is required since the massive data collected by satellite platforms will cost plenty of computing resources. Second, blurry edge and irregular edge caused by the relative movement of the objects and satellite platforms heavily impairs the segmentation performance.
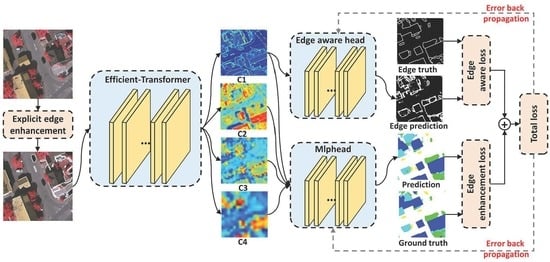
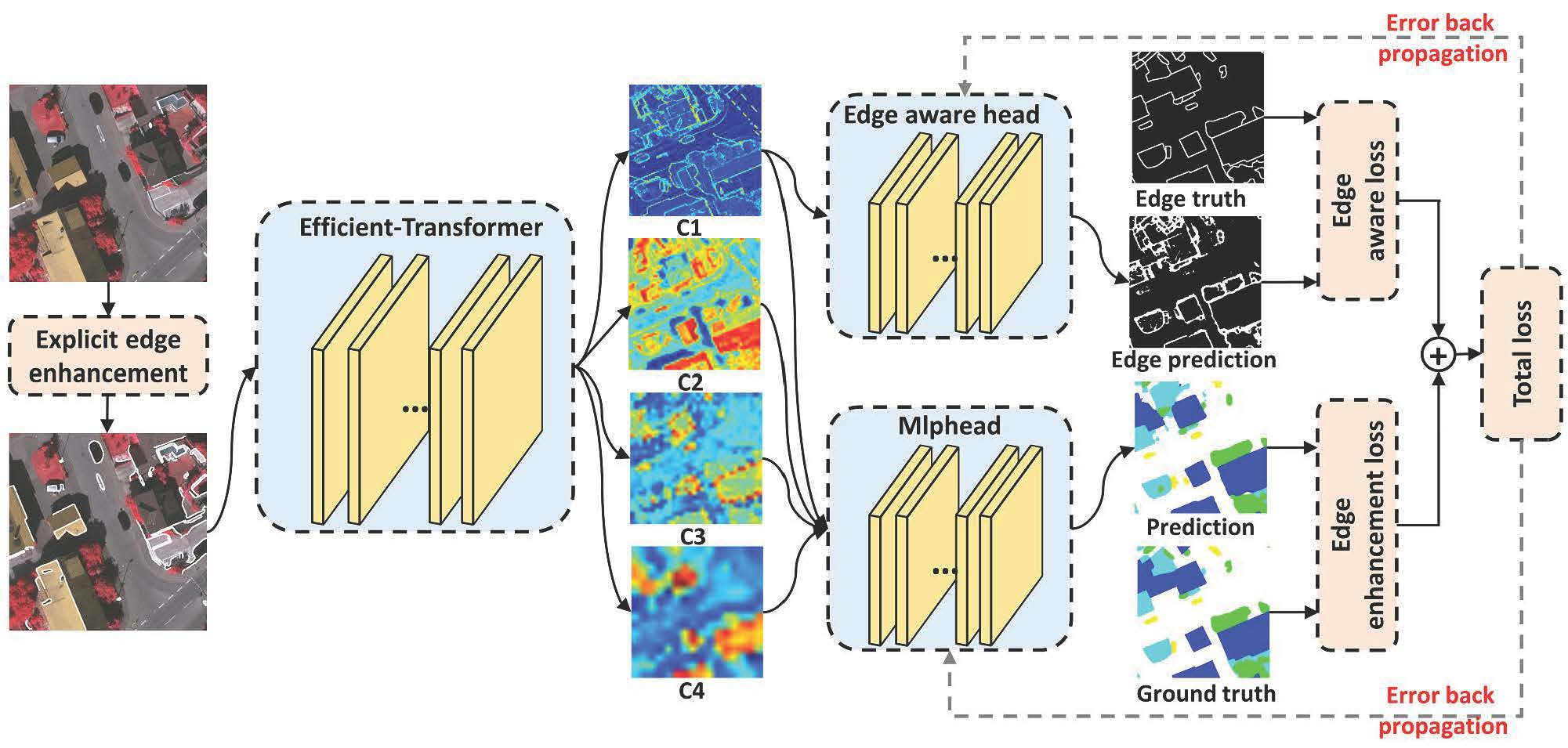
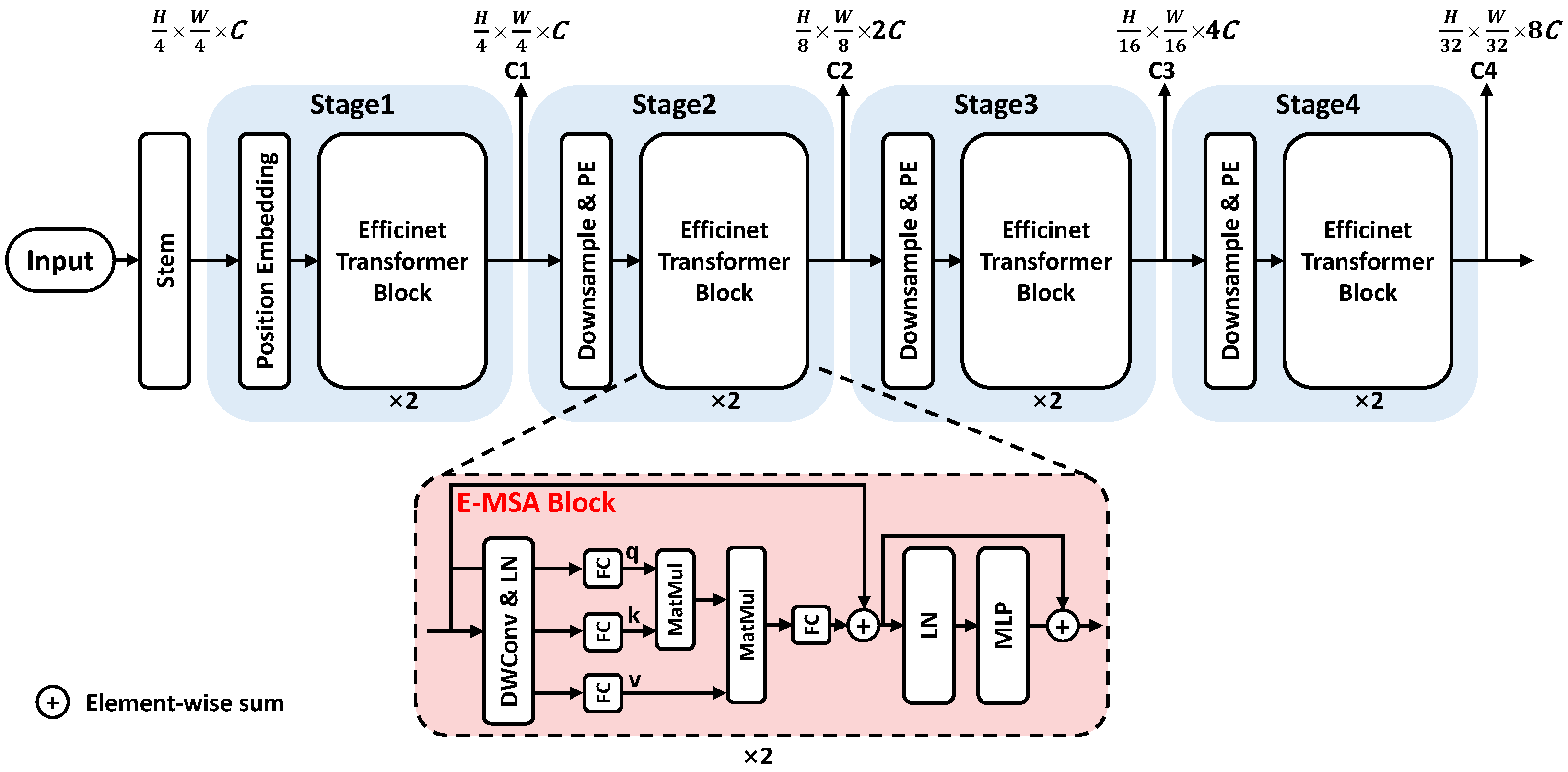
In this paper, we propose the following well-designed architecture to make the Swin transformer lightweight while improving the edge segmentation performance. First, we introduced an Efficient transformer backbone [
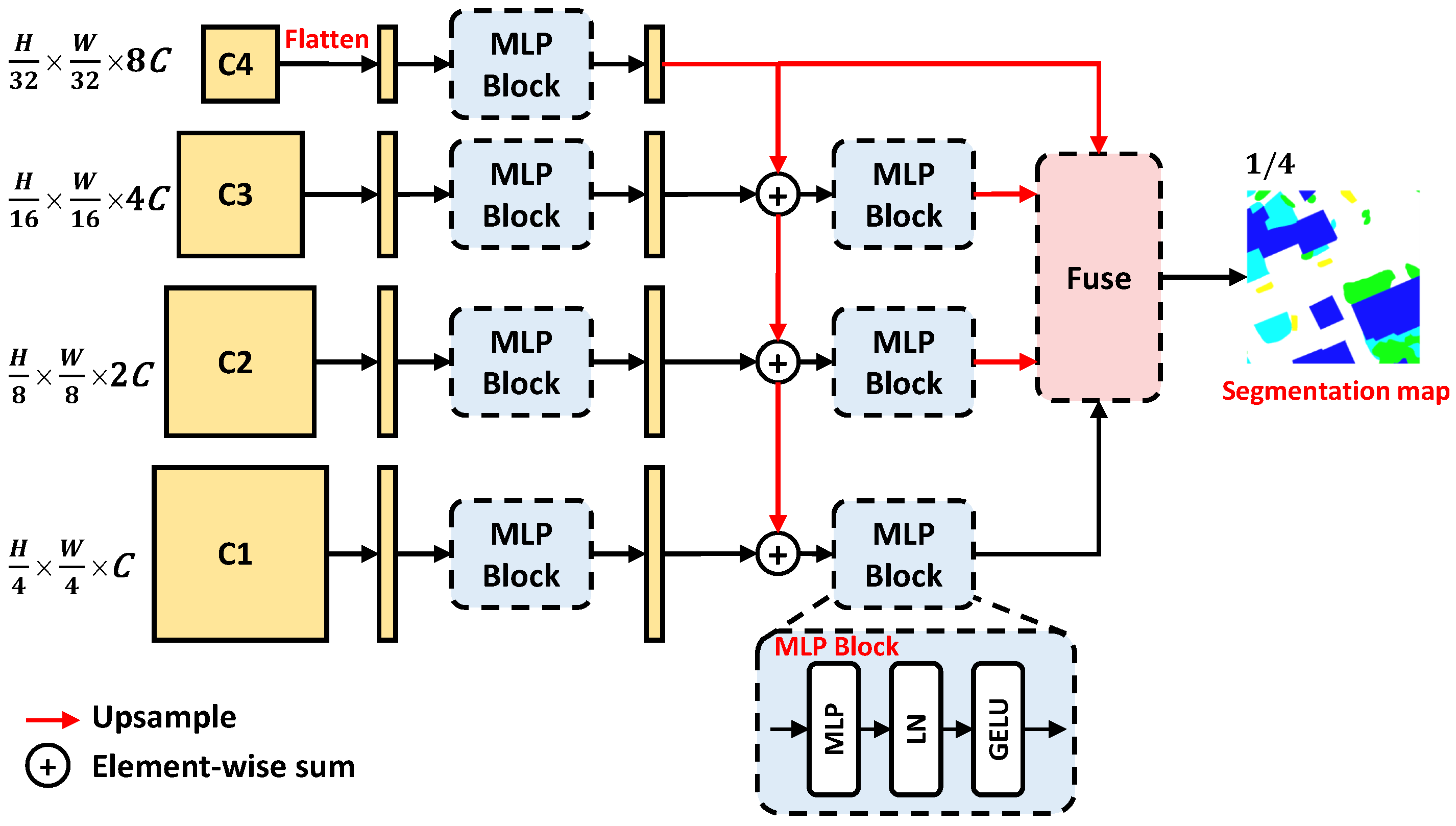
11] to replace the original Swin transformer backbone at the first attempt by reducing the number of transformer blocks and applying a more lightweight transformer design to save the computation load. Second, we designed a pure transformer-based segmentation head called a multilayer perceptron head (mlphead) to replace the complex uperhead of the Swin transformer to further decrease the computational load and realize a pure transformer structure [
12].
In particular, a pure transformer architecture can be helpful to accelerate the inference speed [
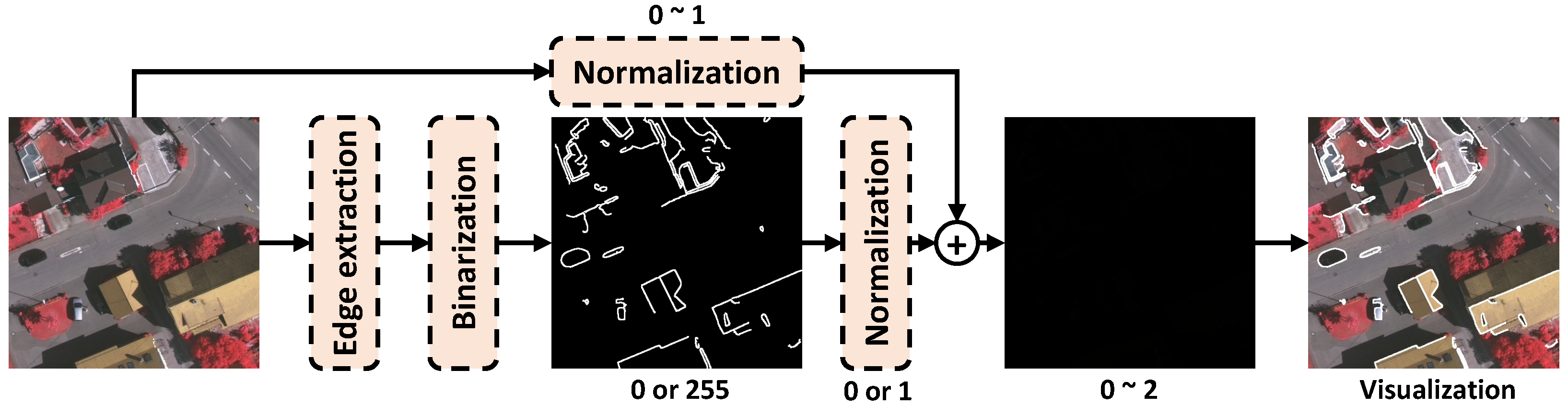
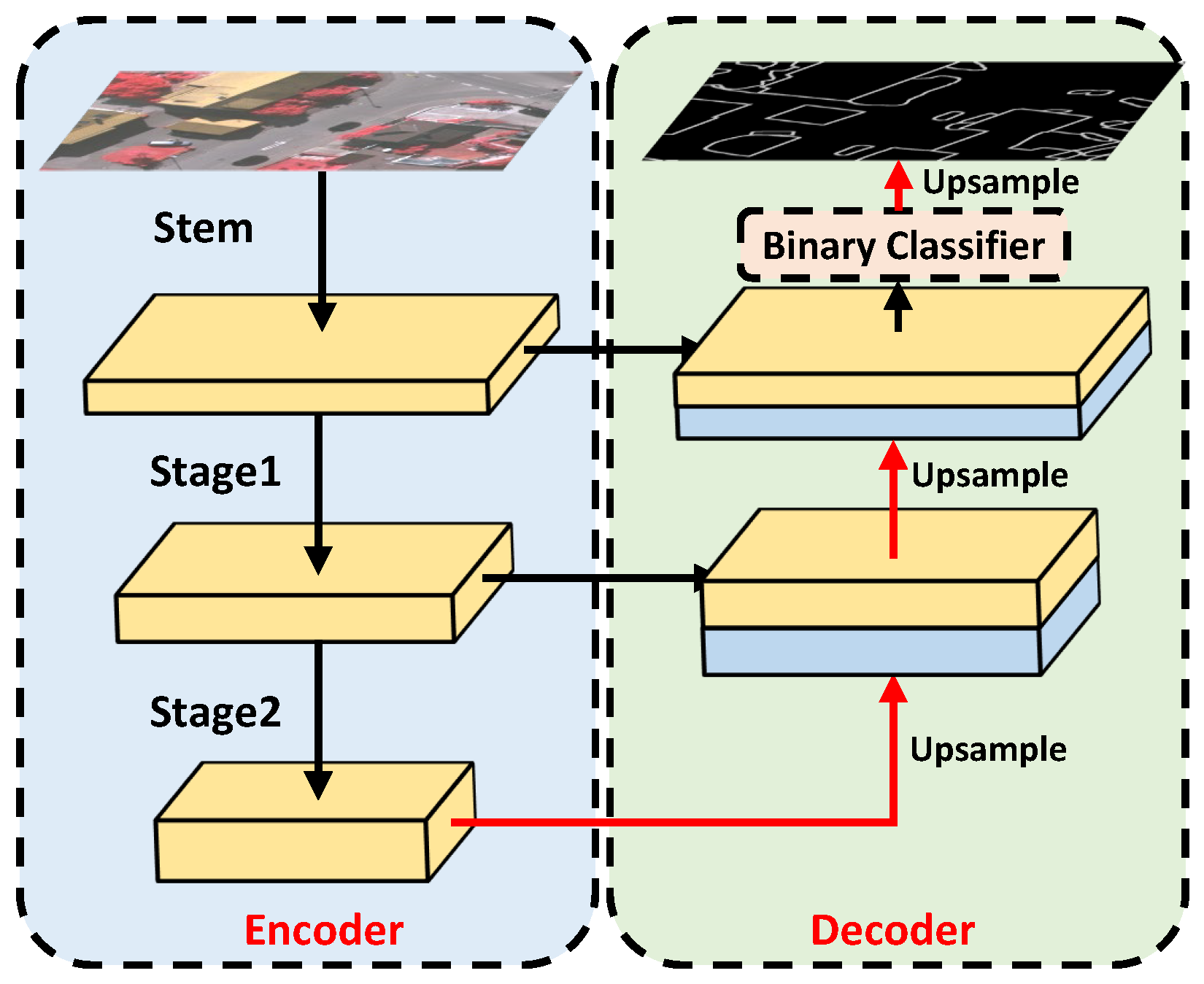
13]. Then, in order to improve the edge segmentation performance, the hierarchical transformer designs are introduced in the Efficient transformer to generate multi-scale features that contain high-resolution features and high-level semantic features to rebuild edge details. Finally, the explicit edge enhancement and implicit edge enhancement methods are proposed to force the model to pay more attention to the segmentation of object edge.
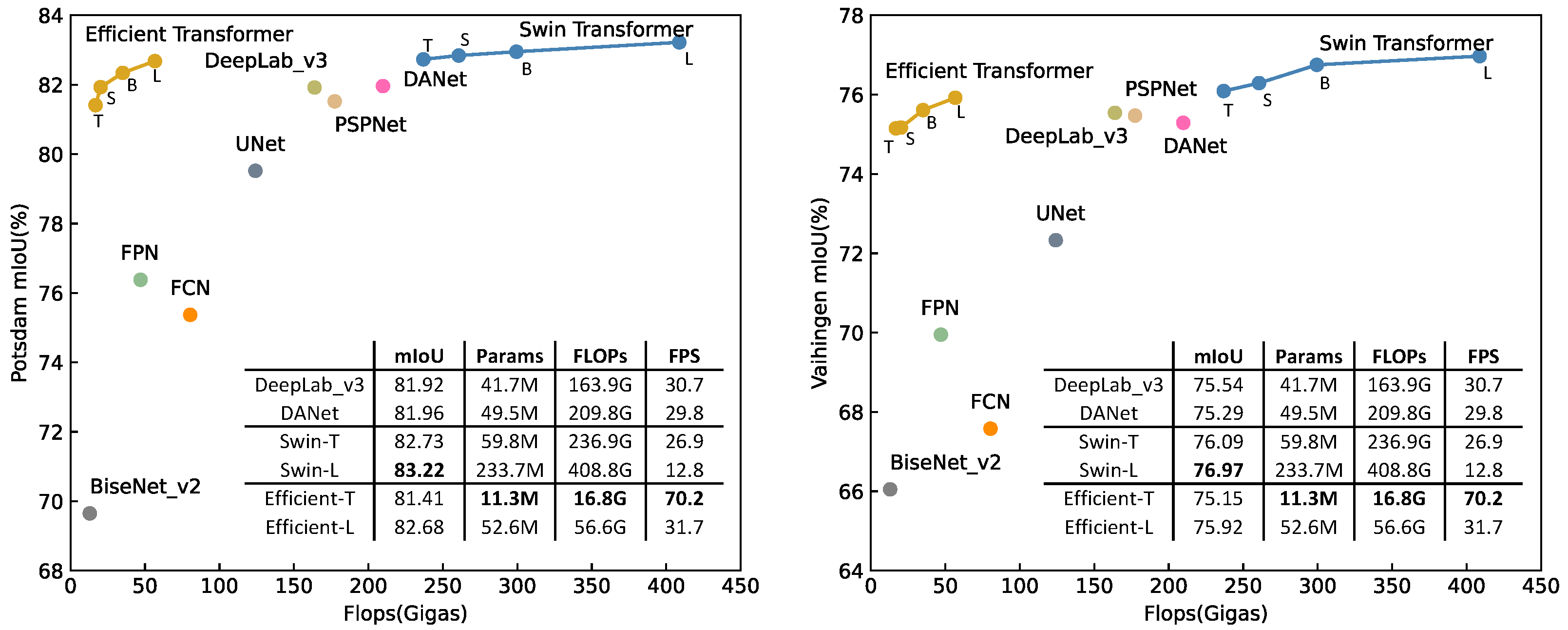
Two experimental datasets, Potsdam and Vaihingen, were adopted to evaluate the proposed methods, as can be seen in
Figure 1, the proposed Efficient transformer achieved a trade off between computational complexity (Flops) and accuracy (mean intersection over union abbreviated as mIoU), and the Swin transformer surpassed CNN-based methods. The code is available at
https://github.com/zyxu1996/Efficient-Transformer, accessed on 1 August 2021.
The main contributions of this work are summarized as follows:
A Swin transformer was introduced to better establish the global relations and proved effective to achieve state-of-the-art performance on the remote-sensing Potsdam and Vaihingen datasets at the first attempt.
A lightweight Efficient transformer backbone and pure transformer mlphead were proposed to reduce the computation load of Swin transformer and accelerate the inference speed.
Explicit edge enhancement and implicit edge enhancement methods proposed to cope with the object edge extraction problem in the transformer architecture.
2. Related Work
In this section, some related work regarding state-of-the-art (SOTA) remote sensing applications and the model designs are introduced, including CNN-based models and transformer-based models, which provide experiences to resolve four main problems in remote sensing segmentation: the acquisition of spatial information, the reconstruction of edge details, the establishment of global relations, and lightweight architecture designs.
CNN-based models: CNN-based methods are specialized in obtaining local representations, hence the spatial information (e.g., shape and texture) and edge details are more concerned, yet the global relations are limited to local representations. The classical CNN architecture FCN [
6] uses pooling layers to obtain features, which impairs the spatial information. First, to repair the spatial information decreased in the pooling operation, UNet [
14] proposed a skip connection to bridge shallow layers and deep layers, thus, finding the lost spatial information from shallow layers.
Second, to obtain the sharp edge, BARNet [
15] proposed a boundary-aware (also called edge-aware) loss embedded on a multi-level feature fusion block to obtain a sharp semantic edge. HRCNet [
5] combined boundary-aware loss and boundary-aware module to improve the edge segmentation results on tiny objects. Third, as for the establishment of global relations, multi-scale fusion and attention mechanisms were introduced in CNN architectures. DeepLab [
16] proposed atrous spatial pyramid pooling (ASPP) to obtain different receptive field information so that the model could establish the relation between local and global. PSPNet [
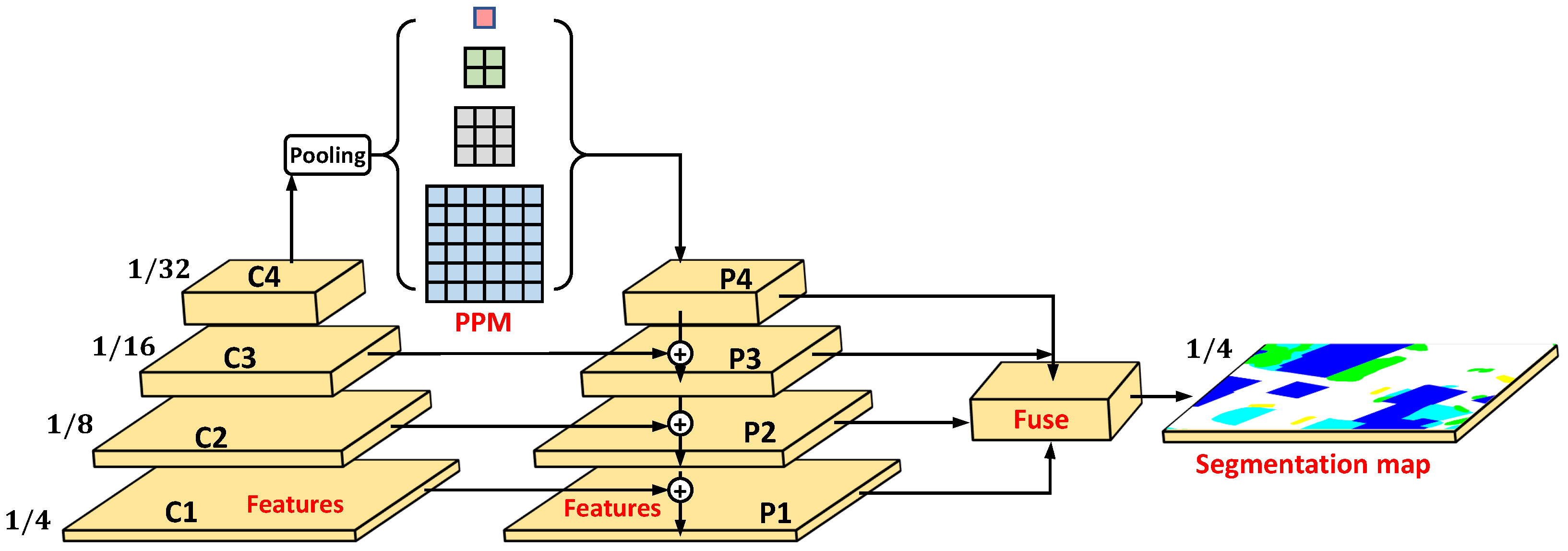
17] proposed the pyramid pooling module (PPM) to directly fuse information from different scales, leading to fused information from different regions.
The FPN [
18] structure designed a cascade addition operation to fuse multi-scale features step by step, thus, making the final segmentation results suited for multi-scale inputs. DANet [
19] employs the self-attention mechanism to build the relation between local pixel and global pixels by calculating the coefficient matrix of the local pixel to obtain the contributions of global pixels and leading to good performance on the Cityscapes dataset. Finally, a lightweight design is required after adding many extra modules.
GCNet [
20] adopted a simplified self-attention mechanism to establish global relations and achieves a similar performance but costs less computation resources. Instead of building the relations between pixels, SENet [
21] designed a learnable module to obtain the weights of each channel to establish the relations in the channel dimension and greatly reduced the computation load. BiseNet [
22,
23] and MobileNet [
24,
25] used well-designed lightweight backbones to realize real-time inferring in mobile devices.
Among all the aforementioned CNN models, the problems of spatial information extraction, edge reconstruction, and lightweight designs are solved to some extent; however, the global relations establishment is far from resolved.
Transformer-based models: Transformer architecture is good at establishing global relations since the attention-mechanism-based designs compose the basic transformer unit but are less robust at extracting local information. Therefore, by referring to CNN designs, the transformer architecture can perfectly resolve the four problems. A shift from CNNs to transformers recently began with the Vision transformer (ViT [
8]), which is the first work to apply the transformer structure to image tasks.
Based on the pioneering work, many following works made improvements. First, to obtain the spatial information, SETR [
9] and TransUNet [
26] adopted the skip connections (proposed by UNet [
14]) to connect shallow layers and deep layers, which first surpassed CNN-based models in segmentation tasks. However, the ViT variants, such as SETR and TransUNet, have high computation complexity, damaging the application of the transformer in segmentation tasks.
Therefore, a lightweight transformer design is urgently needed. Second, to make the transformer architecture lightweight, SegFormer [
27] proposed a simple and efficient design without positional encoding and uses a simple decoder (segmentation head) to obtain the final segmentation results, thus, achieving a competitive performance to the models with the same complexity. ResT [
11] designed an efficient transformer block to reduce the computation load of the original transformer backbone. Third, although these transformers established global relations and also applied lightweight designs, the edge processing is rarely mentioned.
Moreover, uncertain edge definitions are common in the ground truth of remote sensing images, which affected the performance [
28]. To deal with such edge problems, three approaches are introduced here: (a) Fusing high-resolution features is helpful to restore the edge information as these features usually retain more complete structure and edge details [
29]. (b) Using smoother upsampling methods can ensure a smoother edge of the object [
18]. (c) Edge enhancement approaches, such as edge supervision [
5], are capable of urging the model to pay more attention to the object edge, learning more detailed edge information.
Finally, to resolve the four problems, we first adopt the transformer-based architecture where the global relations establishment have been perfectly realized. Then, we use the hierarchical transformer design to obtain spatial information. We propose the Efficient transformer model, which contains an efficient transformer backbone and pure transformer mlphead to achieve lightweight designs. Finally, the explicit and implicit edge enhancement methods are proposed to deal with the blurry edge problem.
4. Experimental Results
The experimental results are arranged as following parts: the study of Swin transformer segmentation model, ablation experiments regarding to our proposed architectures (e.g., the Efficient transformer backbone, mlphead, and two edge processing methods), and comparison with SOTA models on the Potsdam and Vaihingen datasets.
4.1. Datasets and Experimental Settings
Potsdam dataset (
https://www2.isprs.org/commissions/comm2/wg4/benchmark/2d-sem-label-potsdam/ accessed on 29 July 2021): The Potsdam dataset was collected by aerial cameras with a resolution of
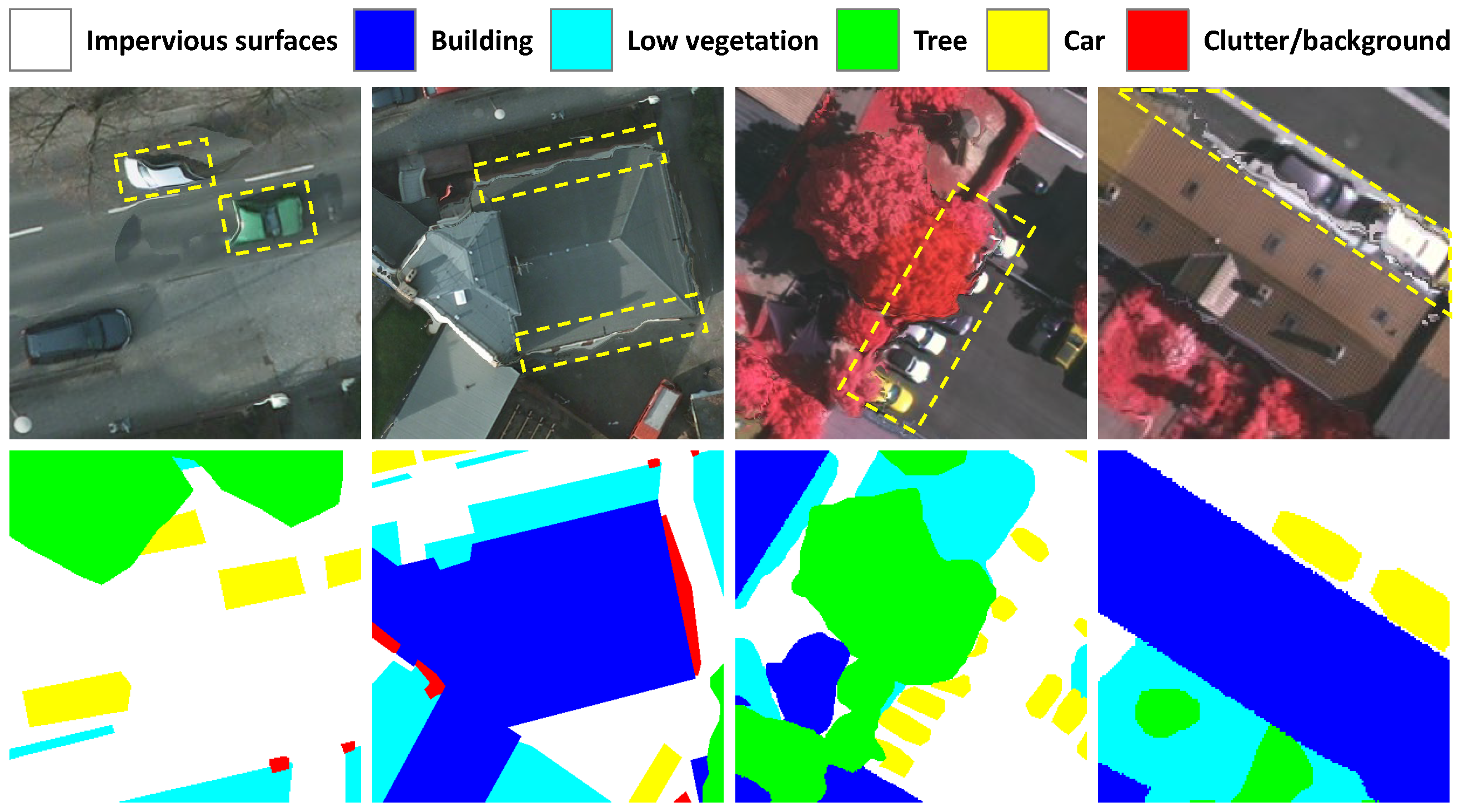
pixels over Potsdam City, and the ground sampling distance was 5 cm. The dataset has 38 samples, with 24 for training and 14 for testing. Each sample contains three images with true orthophoto (TOP), digital surface model (DSM), and ground truth, respectively. TOP is composed of three bands of red (R), green (G), and blue (B). DSM consists of the near infrared (NIR) band, which is used to reflect ground height information. Ground truth contains a total of six categories marked in different colors, namely impervious surfaces (white), building (blue), low vegetation (cyan), tree (green), car (yellow), and cluster/background (red).
Vaihingen dataset (
https://www2.isprs.org/commissions/comm2/wg4/benchmark/2d-sem-label-vaihingen/ accessed on 29 July 2021): The Vaihingen Dataset presents a relatively small village with many detached buildings, where the defined object categories are the same as the Potsdam dataset. The dataset was collected by an aerial camera with a resolution from
to
pixels. This dataset contains 33 samples, with 16 for training and 17 for testing. Unlike the Potsdam dataset, TOP of Vaihingen consists of NIR, R, and G bands so that TOP may look different from natural images (e.g., vegetation is red). In addition, it also contains the DSM and ground truth of the same number of categories.
Remark: We only use TOP for training without extra DSM information. Due to memory limitations, we cut TOP and ground truth into
pixels’ patches for training, and use the blending approach in [
5] to restore the large mosaics for evaluating. The dataset is divided according to the official recommendations (training:testing = 24:14 on Potsdam and training:testing = 16:17 on Vaihingen). Precision, Recall, F1, Overall accuracy (OA), and mean intersection over union (mIoU) are used to evaluate the accuracy of the model. Furthermore, Floating-Point Operations Per Second (Flops) and Params are used to evaluate the complexity of the model. The aforementioned metrics are as follows.
where
,
,
, and
represent true, false, positive, and negative, respectively.
denotes the pixels of truly predicted positive class,
is the truly predicted negative pixels,
is the falsely predicted positive pixels, and
is the falsely predicted negative pixels.
4.2. Study for Swin Transformer
Studies have been conducted to explore the potential application of Swin transformer structure in the field of remote sensing image segmentation (on the Potsdam and Vaihingen datasets), including pre-trained weights of Swin transformer, the best input size, the best optimizer, etc. In addition, various segmentation heads have also also compared, including apchead [
37], aspphead [
16], asppplushead [
38], dahead [
19], dnlhead [
39], fcnhead [
6], fpnhead [
18], gchead [
20], psahead [
40], psphead [
17], seghead [
29], unethead [
14], uperhead [
30], as well as our proposed mlphead, to evaluate, which head is the most suitable for remote sensing image segmentation tasks. All the experiments below use Swin-B as the baseline and are performed on the Vaihingen dataset without using Testing Time Augmentation (TTA).
4.2.1. Study for Pre-Trained Weights
In this section, the pre-trained weights of Swin transformer on the public datasets are first discussed. To explore the importance of initializing pre-trained weights, we compare different initializing pre-trained weights during the training process, which include without pre-trained weight (w/o), ImageNet 1k (1k means the category numbers) [
41], ImageNet 22k, ImageNet 22k to 1k (pre-training on ImageNet 22k and fine tuning on ImageNet 1k), and Ade20k [
42].
The pre-trained sizes of , or pixels, are meantime discussed. All experiments are performed on the Vaihingen dataset, using input size to train 100 epochs, and using Swin transformer base (Swin-B) as the baseline. Swin-B has two model scales, which are large shifted windows size 12 (w12) and small shifted windows size 7 (w7).
In this study, mIoU is selected as the main reference metric to be compared. As is shown in
Table 2, the following results can be concluded. First, the pre-trained weight is very helpful to improve the accuracy of the model, where the model with pre-trained weights obtained an increase of almost 6% on mIoU compared with w/o. Second, it is difficult for the model w/o pre-trained weights to improve the model accuracy even if the training epoch increases from 100 to 1000.
Third, the ImageNet 22k pre-trained dataset is better than other pre-trained datasets (OA in bold). Fourth, the pre-trained size is better than pre-trained size in performance and computational complexity. Fifth, the pre-trained weight on segmentation dataset Ade20k is not better than the classification dataset ImageNet 22k, because the training data of the Ade20k dataset is much less than ImageNet 22k.
Therefore, large scale pre-training determines the segmentation performance rather than the type of pre-training dataset. Finally, although the mIoU score of using the small-scale remote sensing dataset Potsdam is not good, there is still a significant improvement in comparison with w/o using pre-trained weights (mIoU increased from 70.17% to 71.56%.)
The training size is fixed to
during the training process; however, the pre-trained weight is obtained with size
or
, which may affect the final accuracy. Therefore, we further explore the impact on model accuracy when training with different training sizes and pre-trained sizes. The experimental results are shown in
Table 3. It can be seen that with a larger training size, the accuracy will obtain an increase because the larger training size provides a larger receptive field.
However, due to memory limitations, it is better to use for the complexity-accuracy trade-off. Moreover, when the pre-trained size and training size maintain the same resolution, the OA of the model does not significantly improve, and thus the training size is still the main reason for determining the accuracy of the model. The following experiments will use the current complexity-accuracy trade-off configuration with ImageNet 22k pre-trained weight, training size and Swin-B w7 model.
4.2.2. Study for Optimizer
The optimizer plays a paramount role part in deep learning models, directly determining the optimization direction and final performance of the model [
43]. Commonly used optimizers in semantic segmentation are SGD [
44] and AdamW [
45]. SGD is a commonly used optimizer for CNN models, to ensure stable convergence of the model leading to a good convergence performance. AdamW is considered because it has a faster convergence rate than SGD; however, the training process is unstable and heavily depends on the appropriate weight decay and L2 normalization parameters. As a result, AdamW is usually used in the transformer structure with a slower convergence to speed up the model convergence.
The Vision transformer (ViT) model is considered sensitive to the choice of the optimizer (AdamW or SGD); however, it is unknown whether the Swin transformer is also sensitive to the type of optimizers. Therefore, a comparative study was conducted to evaluate the performance of using SGD and AdamW on the Swin transformer structure. It can be seen from
Table 4 that AdamW performs better than SGD, and the mIoU can increase by more than 1% by replacing the optimizer.
In addition, when the auxiliary segmentation head (Aux) is added (w for with segmentation head and w/o for no segmentation head), the mIoU can be further increased by about 0.4%. This shows that the Swin transformer still relies on the optimizer selection, and the AdamW optimizer can achieve better performance. As is shown in
Figure 11, the AdamW optimizer has a faster convergence rate and lower loss than SGD, which yields the superiority of AdamW being applied in the Swin transformer.
4.2.3. Study for Segmentation Head
The segmentation head determines the utilized degree of features extracted from the backbone, which is a crucial factor to obtain a good segmentation result. After the backbone extracting the features, the segmentation head restores these features to the input image size and finally discriminates categories pixel by pixel. Therefore, a powerful segmentation head is highly important to realize the full performance of the backbone. To this end, we compare dozens of commonly used segmentation heads to explore what kind of head can better achieve the performance based on Swin transformer backbone. The Swin transformer has four output features, named C1, C2, C3 and C4, with corresponding resolutions of , , , and . The semantic information contained in these features is gradually increased, and the spatial information is gradually decreased.
By observing the number of input layers in
Table 5, the head using at least two input layers obviously has a higher accuracy (mIoU over 76%). In comparison with aspphead, asppplushead integrates shallow features C1 so that the mIoU improves 6.63%, meaning that integrated features at different scales is essential to improve the final performance. In addition, it can be found that when taking only C4 as the input of the segmentation head, such as apchead, dahead, dnlhead, gchead, and psahead, the attention-mechanism-based designs achieve poor performance.
Instead, heads incorporating different scales information, such as asppplushead, fpnhead, seghead, unethead, upperhead, and mlphead, are capable of obtaining good performance. As a result, based on these findings, the proposed mlphead head based on multi-scale fusion can achieve good performance. It is worth noting that the Flops of mlphead are only of the upperhead, and the params is the lowest of all heads.
Further, the impact of different input layers on the final performance is also compared. C1, C2, C3, and C4 are the input sizes of
,
,
, and
, respectively. We use stride 4 (s4), s8, s16, and s32 to represent the multiples of the corresponding downsampling size to correspond to the four input sizes. As is depicted in
Table 6, aspphead and dahead with poor performance are chosen to explore the performance of different input layers. It can be seen that when C1 or C4 is used, the mIoU is low because C1 lacks semantic information and C4 lacks spatial information. When C3 is used, a good balance between spatial information and semantic information can be achieved, but it is still slightly lower than using all four layers. To guarantee lower Flops and Params, C3 can be used as the input of the segmentation head.
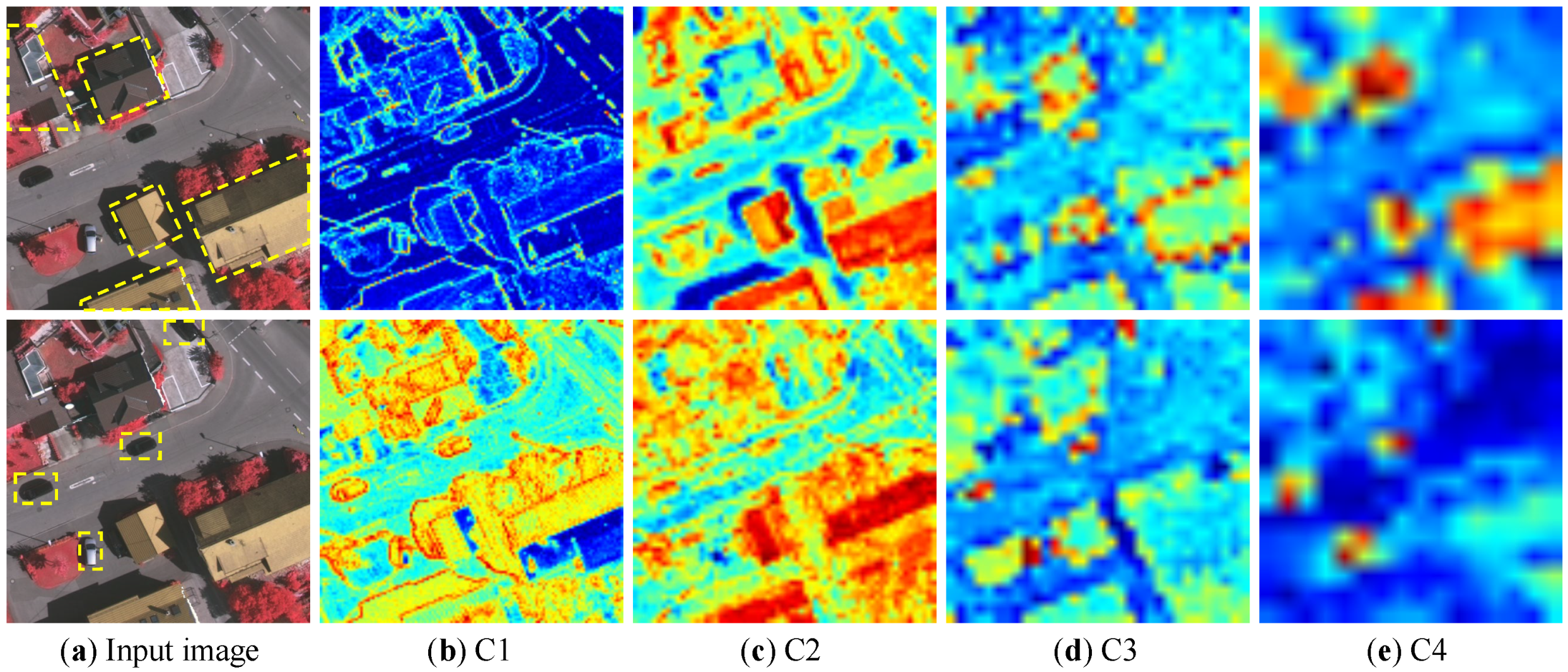
Finally, to intuitively understand the features contained in each layer of input layers, the features of C1, C2, C3, and C4 are visualized in
Figure 12, where the red parts indicate the areas of concern. It can be seen from left to right that the buildings (with yellow dashed box) in the image of first row are gradually concerned.
As can be seen, the feature C1 focuses on the edges of all the objects, the feature C2 focuses on the rectangular shape including most of the buildings, the feature C3 only focuses on the edge of buildings, and the feature C4 only focuses the building category, which reveals that the attention of the model is gradually transferred from random categories to specific category (e.g., building category in first low). Moreover, it also explains why the C3 can achieve the best performance among the four layers, since the C3 layer can distinguish different categories while retaining spatial information (e.g., the edge). The category car in the second row also presents the same conclusion.
4.3. Efficient Transformer Backbone and Mlphead
In practical scenarios, the inference speed (usually expressed by processing images per second, abbreviated as img/s) of the model is important to make real-time predictions. When the input image size is fixed, the efficiency of the model mainly depends on the complexity of the model, which is usually related to the Flops and Params. However, the model inference speed is not linearly related to the Flops and Params. Therefore, in this experiment, we introduce the model inference speed evaluation index img/s to evaluate whether the model can complete the video real-time inference requirements. In
Table 7, we compare the four combinations of the Swin transformer, uperhead, Efficient transformer, and mlphead to evaluate the advantages of Efficient transformer and mlphead in inference speed.
It can be seen from
Table 7 that with the same uperhead, comparing Swin-B and Efficient-B, the mIoU of Efficient-B drops by 0.66%, but the inference speed increases to 24.7 img/s, meeting the real-time requirements (usually 25 img/s). When the head is replaced with the lighter mlphead, the inference speed is increased by 2.5 times (47.9 img/s). Therefore, when a small amount of accuracy is sacrificed, the model can meet the requirements of real-time inference, which is of great significance to the practical application of the model and saving computing resources.
4.4. Edge Processing Methods
To verify the effectiveness of our proposed explicit edge enhancement (EEE) and implicit edge enhancement (IEE) methods, an ablation experiment is carried out on the Vaihingen dataset based on the Efficient-T with the mlphead model. This can be found in
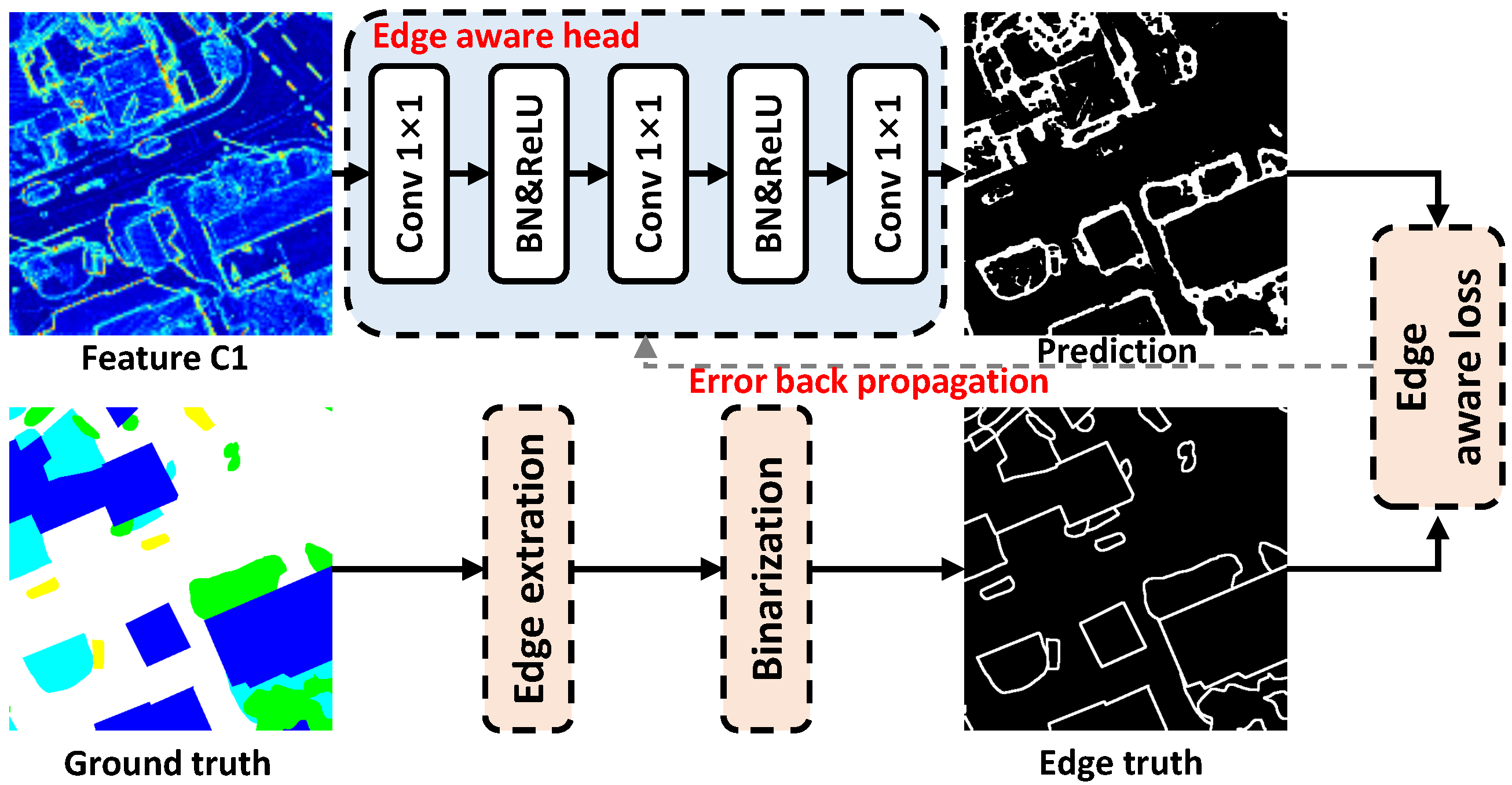
Table 8, the effectiveness of auxiliary edge fusion (AEF), edge supervision (ES), and edge enhancement loss (EEL) methods are evaluated. It can be seen that by using the proposed explicit and implicit edge enhancement methods, the IEE improves the mIoU by 0.48%, the EEE improves the mIoU by 0.36%.
When combining explicit edge enhancement and implicit edge enhancement methods, the final mIoU obtains a 0.59% increase, and it seems that the effects of IEE and EEE are overlapping. We compare the results of adding IEE and EEE methods on the Vaihingen and Potsdam datasets in
Table 9. The mIoU of Potsdam obtains a 1.06% increase, and the Vaihingen mIoU improves 0.59%. As the Potsdam dataset has more complex scenes, the Efficient-T without edge enhancement methods found it more difficult to predict a fine edge, and thus the edge enhancement methods may produce more obvious improvements.
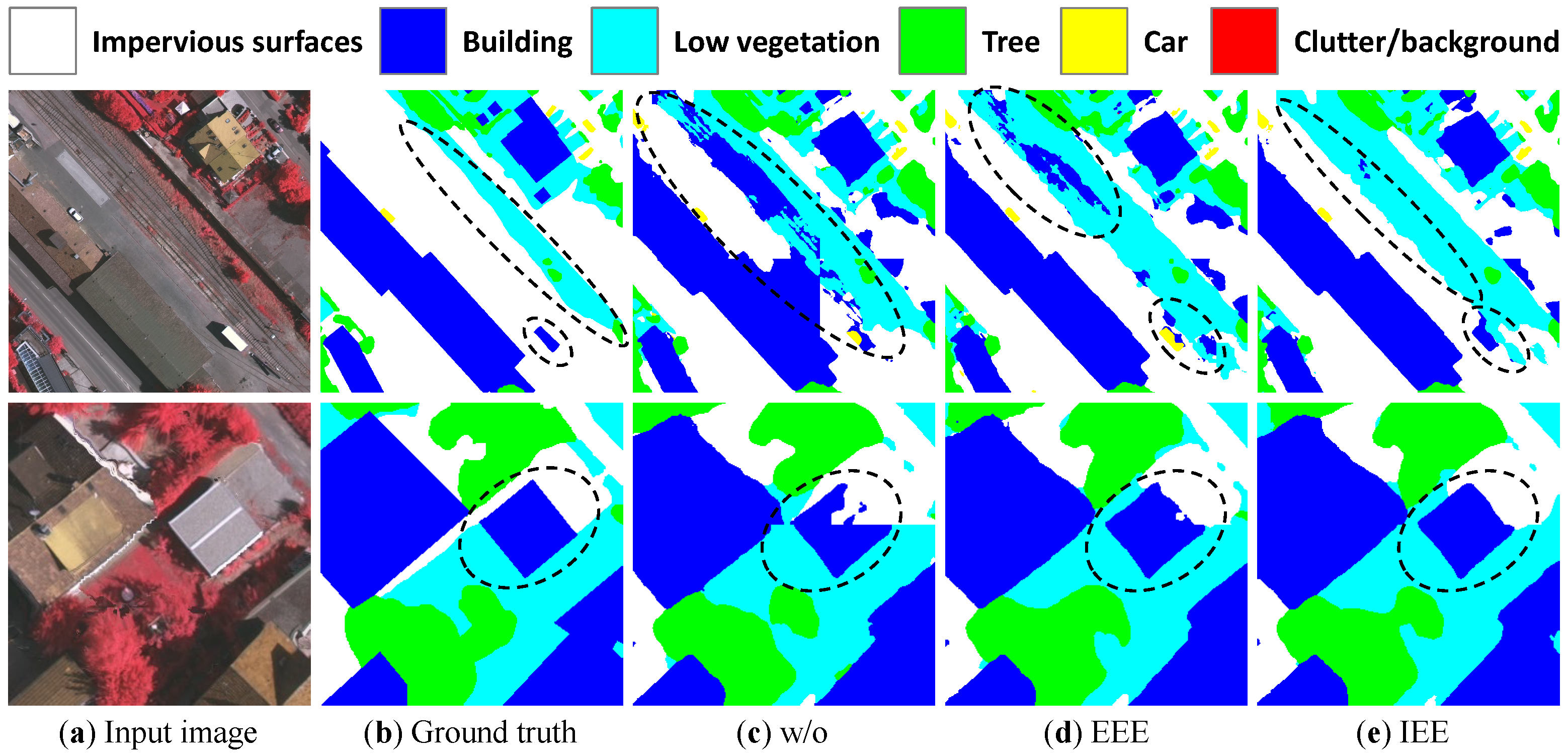
Finally, we also compare the visual effects of employing the explicit edge enhancement and implicit edge enhancement methods.
Figure 13 shows the improvements in the edge part, where the edge of without (w/o) any edge processing methods is irregular and wrongly classified (see ellipse). Using EEE or IEE can obtain a sharper edge, especially by employing the IEE method, the edge improves a great deal.
4.5. Comparison to SOTA Methods
Previous experiments have deeply discussed the application of the Swin transformer in remote sensing tasks and verified our proposed Efficient transformer, mlphead, and edge enhancement methods. In this section, based on our previous experimental configuration and the same parameter settings, we compare some classic CNN models, including FCN [
6], FPN [
18], PSPNet [
17], UNet [
14], BiseNet_v2 [
23], DeepLab_v3 [
16], and DANet [
19], as well as the Swin transformer studied in this article. The Efficient transformer with mlphead model, including Efficient-T, Efficient-S, Efficient-B, and Efficient-L are compared.
We evaluate the accuracy and complexity of the model on the Vaihingen and Potsdam datasets. For a fair comparison, the CNN models all use ImageNet 1k pre-trained weights to initialize the models, and all models are with no Testing Time Augmentation (TTA). On the Potsdam dataset, to avoid the overfitting problem, we add a mixup data augmentation strategy.
Results on Vaihingen: As can be seen from
Table 10, in comparison with DeepLab_v3, Swin-L obtains an improvement of 1.33%, 0.45%, 0.89%, 0.80%, and 1.43% on Recall, Precision, F1, OA, and mIoU, respectively. However, the shortcomings of Swin-L are also obvious. For instance, the cost of Flops and Params is 2.5 times and 5.6 times of DeepLab_v3. On the contrary, our proposed Efficient-L model costs fewer calculations. Compared with DeepLab_v3, it obtains an improvement of 0.38%, 0.07%, 0.22%, 0.22%, and 0.38% on Recall, Precision, F1, OA, and mIoU, respectively, but only
of the Flops and 1.3 times the Params are used.
Moreover, the Efficient-T model only uses 16.78G Flops and 11.30M Params, which is almost equivalent to BiseNet_v2, but mIoU improved by 9.1%. Therefore, it can be concluded that the Efficient transformer model is better than the CNN model in terms of the accuracy and complexity, and although the Swin transformer is far better than the CNN model in terms of accuracy, the excessive complexity may be a major problem.
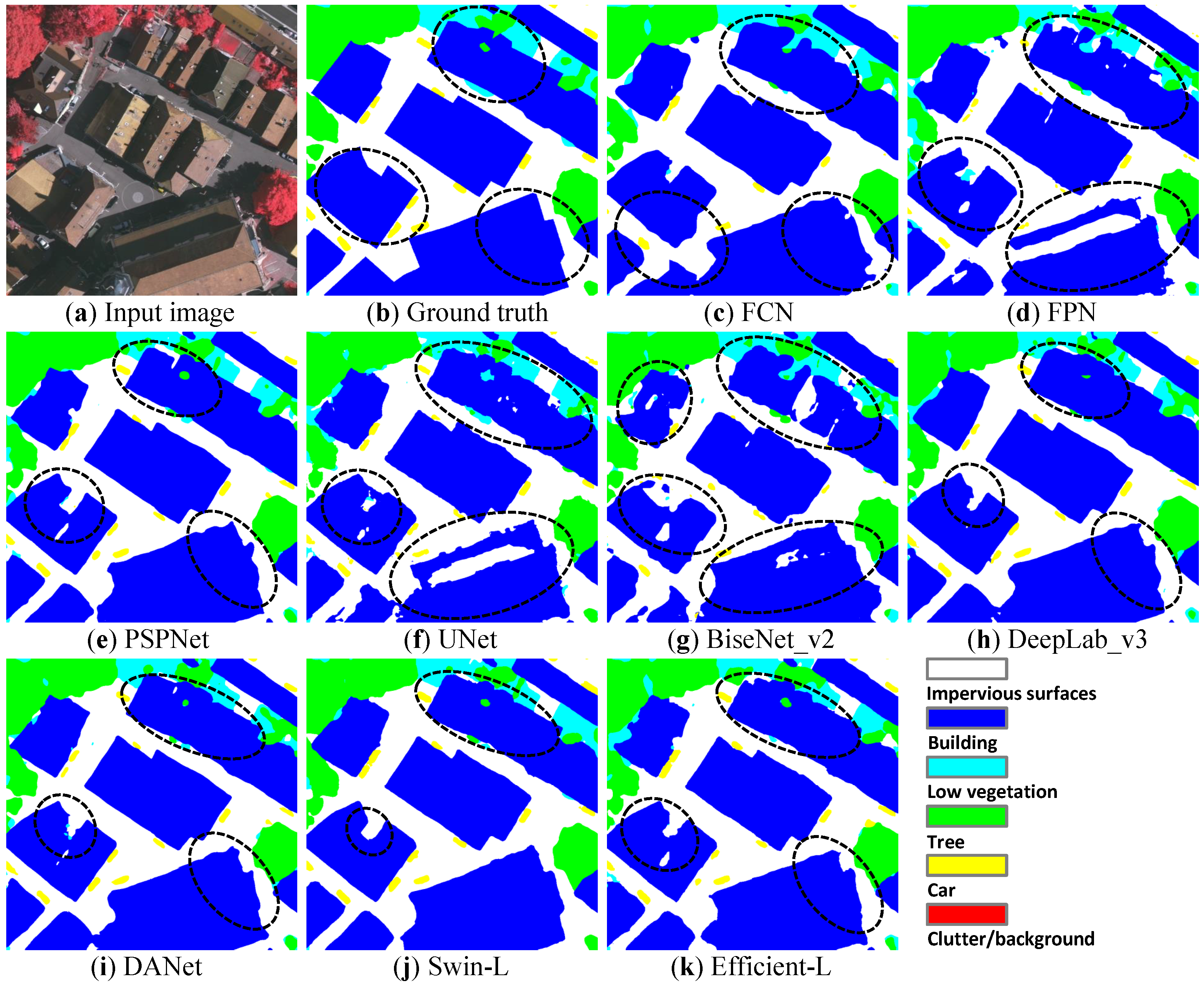
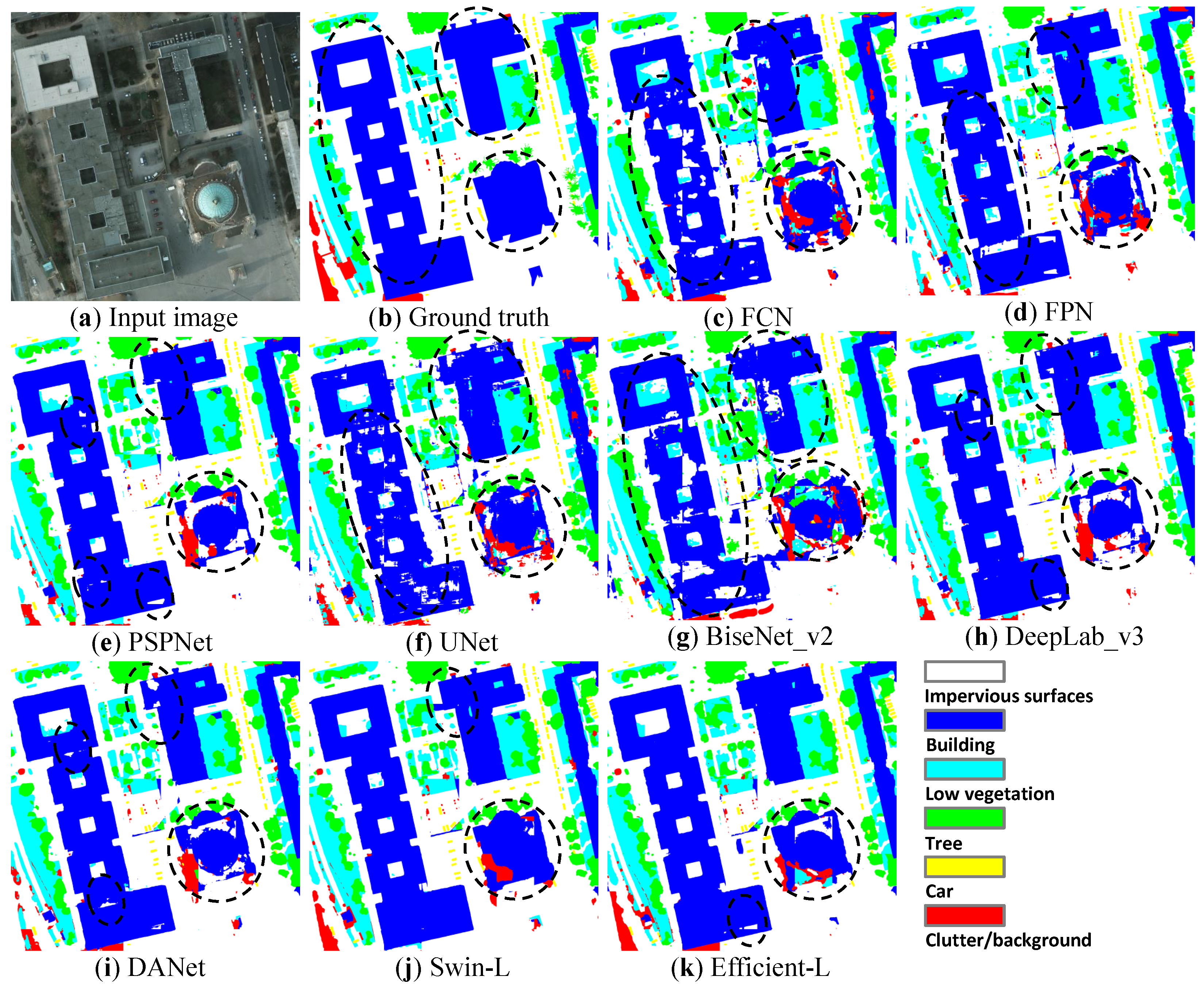
Results on Potsdam: As can be seen from
Table 11, compared to DANet, the best-performing CNN model on the Potsdam dataset, Swin-L obtains 0.97%, 0.54%, 0.75%, 0.65%, and 1.26% improvements on Recall, Precision, F1, OA, and mIoU, respectively. Efficient-L gains 0.6%, 0.27%, 0.43%, 0.44%, and 0.72% improvements on Recall, Precision, F1, OA, and mIoU, respectively. It can be found that on the Potsdam dataset, Efficient-L achieves a performance closer to Swin-L, and the scores of Swin-T, Swin-S, Swin-B, and Swin-L are also closer, which indicates that the Efficient transformer can obtain greater benefits on large scale datasets.
In addition, from the prediction maps of
Figure 14 and
Figure 15, the transformer models can clearly achieve better segmentation results on large scale objects (e.g., buildings) compared with the CNN models, which are attributed to the global relation modeling ability of transformers.
5. Discussion
To exploit the large differences between transformer-based methods and the CNN-based methods, a comparative study on the Vaihingen and Potsdam datasets was conducted. For a fair comparison, both methods use Testing Time Augmentation (TTA), including flip and multi-scale testing. Flip includes horizontal mirror flip and vertical mirror flip, and the ratio of multi-scale testing is set as 0.5, 0.75, 1.0, 1.25, and 1.5. The methods for comparison include three CNN methods, which were the top 1 method on the Vaihingen challenge called HUSTW5, the top 1 method on the Potsdam challenge called SWJ_2 [
46], and a previous SOTA work HRCNet_W48 [
5], and the two transformer-based methods proposed in this article, namely Swin-L with uperhead, Efficient-L with mlphead.
The results are shown in
Table 12. First, observing the results on the Vaihingen dataset, it can be found that transformer-based methods were significantly better than the CNN methods in most of the accuracy metrics by taking HRCNet_W48 as the benchmark. On the Potsdam dataset, Efficient-L and Swin-L also easily outperformed the CNN-based methods in all the accuracy metrics. When using the same TTA strategy, Efficient-L outperformed Swin-L on mIoU, presenting that Efficient-L can obtain higher benefits from TTA.
Then, by observing the results of OA and mIoU, it is found that transformer-based methods had less improvement in OA value but a larger increase in mIoU. The OA metric is used to describe the correctly classified proportion of pixels in the classification of a picture, mIoU describes the degree of overlap between two regions. Therefore, when the OA is approximately the same, the method with high mIoU has higher prediction accuracy.
Then, we calculate the IoU of each category. The comparison results are shown in
Table 13. On the Vaihingen dataset, the IoU of the Car category has significantly improved owing to cascade addition architecture in the segmentation head, improving the ability to recognize small objects. In addition, the use of large scale pre-trained weights makes it possible to achieve good classification performance even on the small scale dataset of Vaihingen when the proportion of car category is very low.
On the Potsdam dataset, since the data of each category is sufficient, the improvement effect of each category is relatively close. Efficient-L and Swin-L have a significant improvement in the low vegetation category, showing that the transformer structure has an advantage in dealing with large scale irregular categories, which is attributed to the establishment of global relations.
In
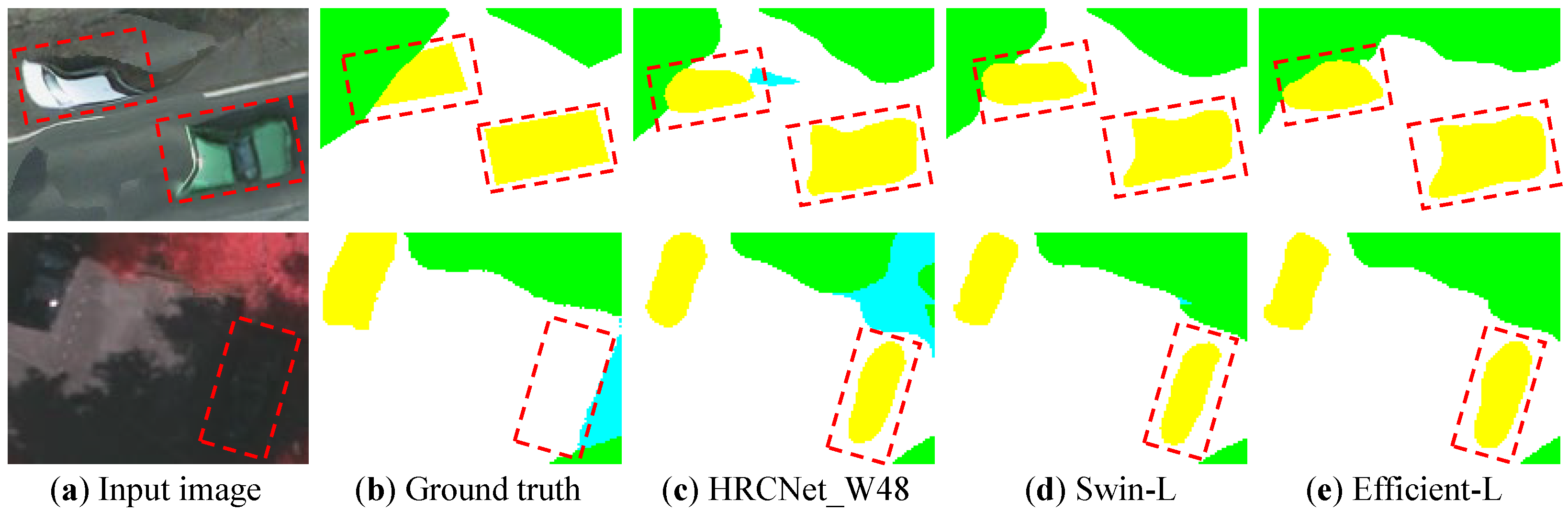
Figure 16, we compare different methods when dealing with blurry areas. The top image displays blurry areas of the cars, and the bottom image shows the missing target in the ground truth. The transformer-based methods (Swin-L and Efficient-L) tend to predict better edges of blurry areas, which are close to the input image, instead of the revised ground truth. HRCNet_W48 is slightly weak at dealing with blurry input, even making wrong predictions (blue pixels). As for the imperceptible objects in the shadow, all the compared deep learning methods can correctly identify the objects.
6. Conclusions
In this paper, the hierarchical Swin transformer was introduced, and we first attempted to deal with remote sensing image semantic segmentation. Based on that, a novel transformer was proposed to cope with high computation loads and blurry edge problems. In particular, we first propose a novel segmentation model composing of Efficient transformer and mlphead to reduce the computation load. The Efficient transformer has a lower computational complexity but competitive performance to the Swin transformer, and mlphead is a pure transformer design enabling acceleration of the inference speed.
Composing the two lightweight designs, the Efficient transformer (e.g., Efficient-B, see
Table 7) achieved 47.9 img/s inference speed with
pixels input, greatly outperforming the real-time inference speed of 25 img/s. In addition, explicit and implicit enhancement methods are well designed to improve the edge segmentation. By using the two edge enhancement methods, the original blurry edge can be significantly improved. Finally, the proposed Efficient transformer was compared with state-of-the-art models and achieved a tremendous improvement where Efficient-L achieved 77.34% and 83.66% on mIoU scores on the Vaihingen and Potsdam datasets, respectively.
In comparison with previous SOTA works HRCNet_48, Efficient-L obtained a 3.23% mIoU improvement on Vaihingen and 2.46% mIoU improvement on Potsdam. In the future, a better edge extractor in the explicit enhancement method is desired to further promote remote sensing segmentation performance.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}