Sentinel-3A SRAL Global Statistical Assessment and Cross-Calibration with Jason-3


Abstract
:
1. Introduction
2. Data and Methods
2.1. Sentinel-3A Data
2.2. Jason-3 Data
2.3. Data Analysis Methods
3. Results and Discussion
3.1. Edited Measurements
3.2. Cycle by Cycle Statistical Analyses
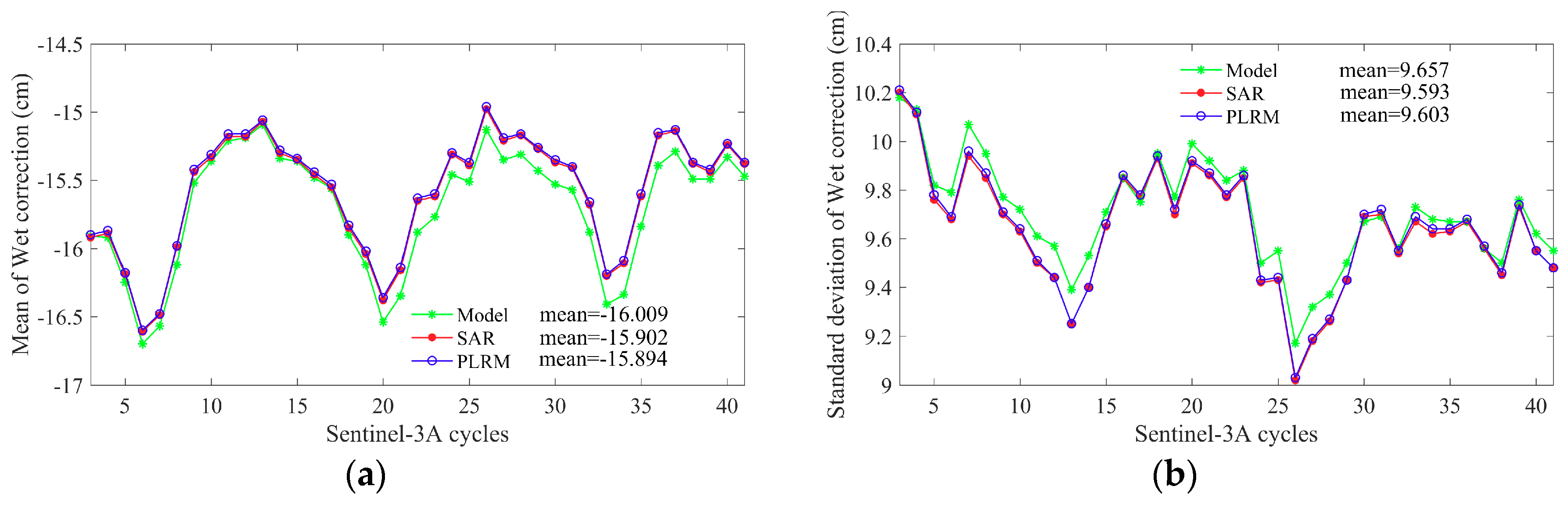
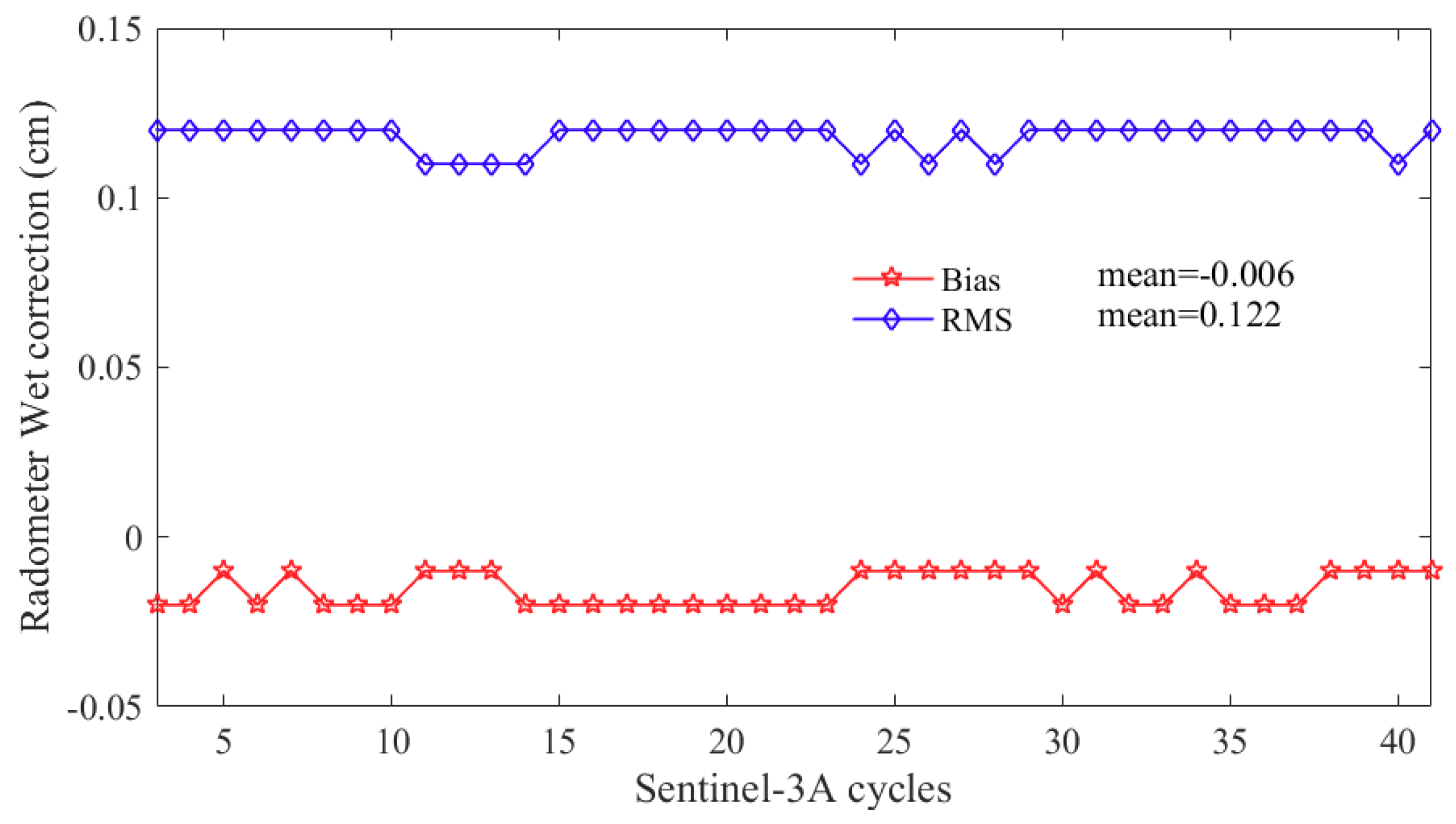
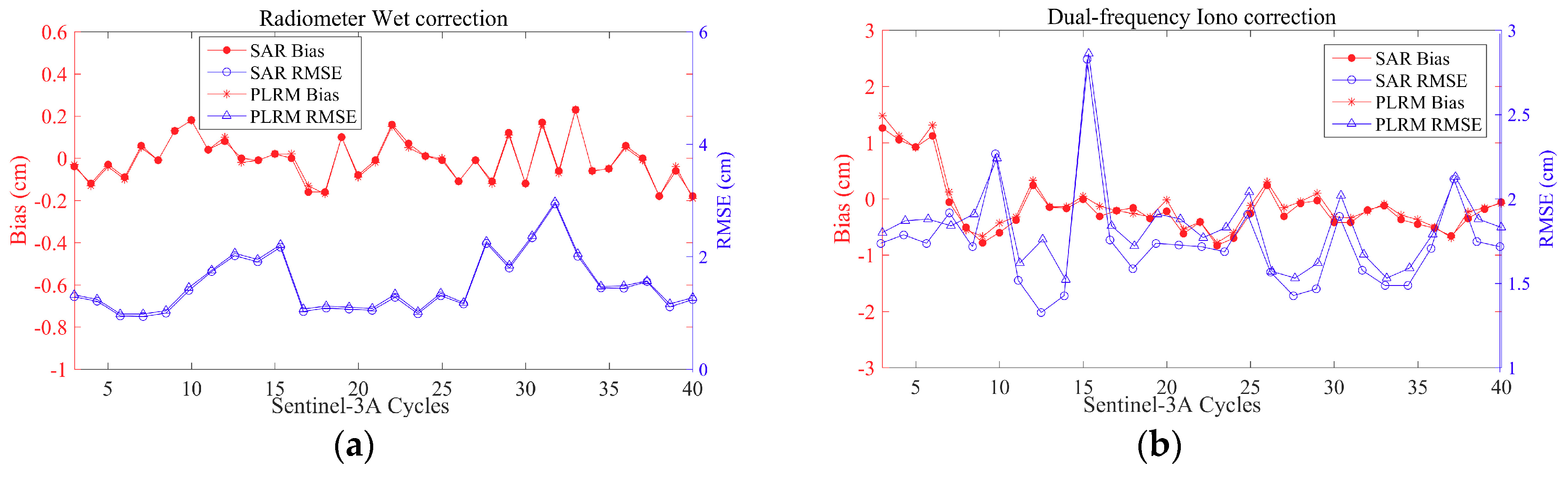
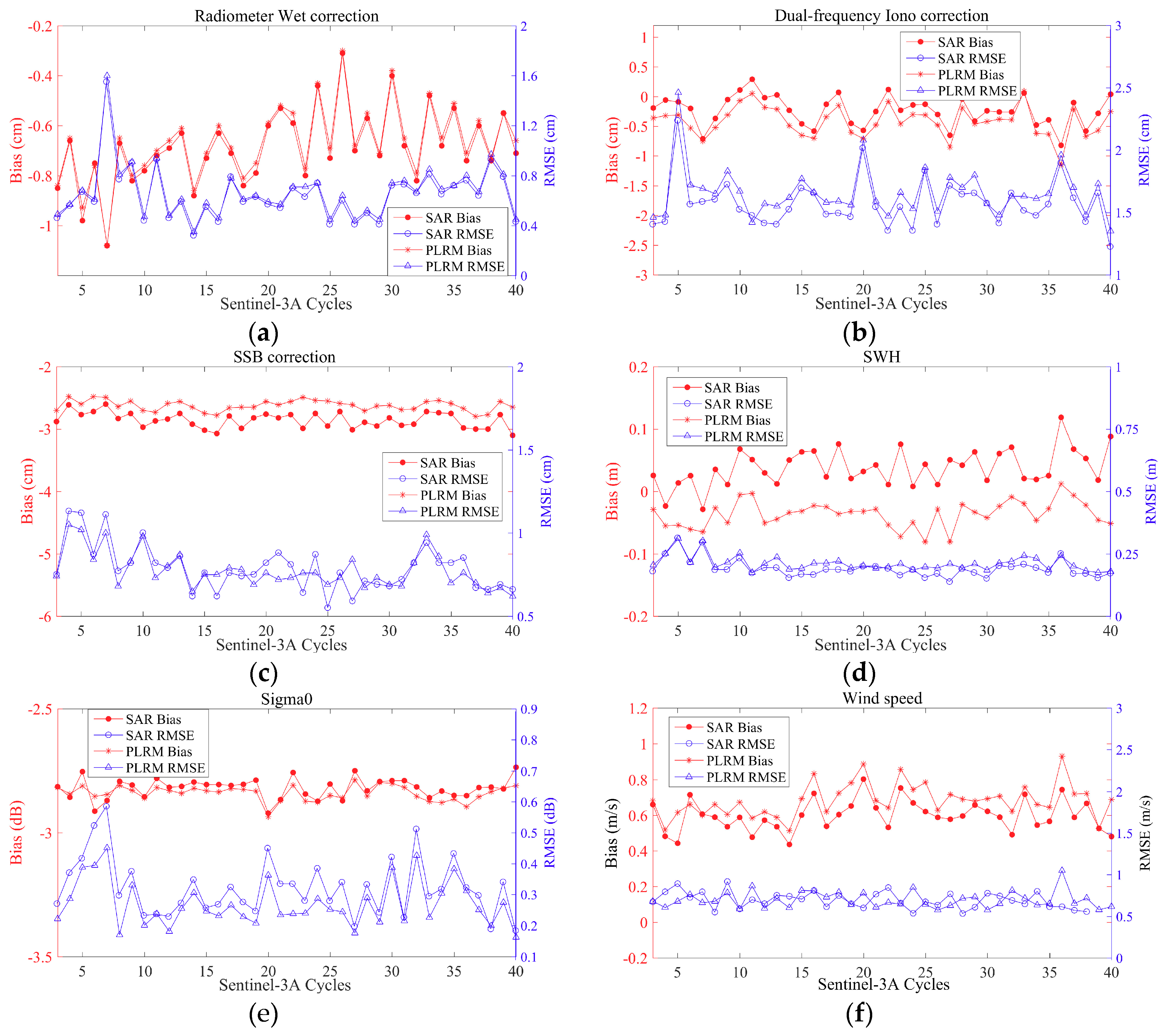
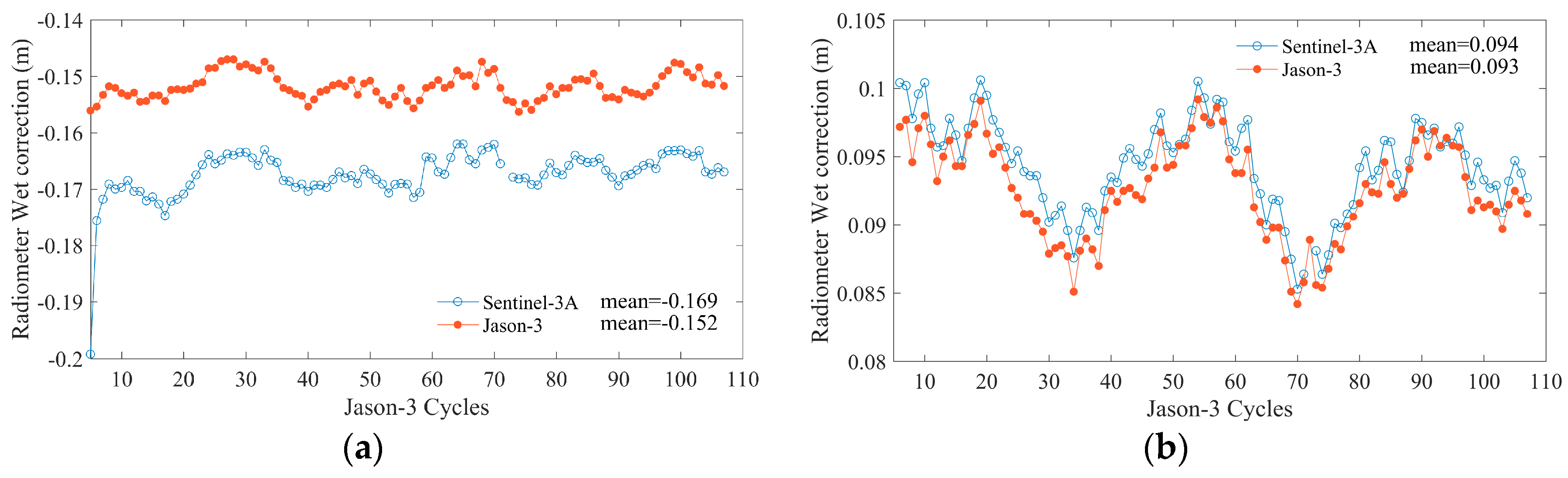
3.2.1. Wet Tropospheric Correction
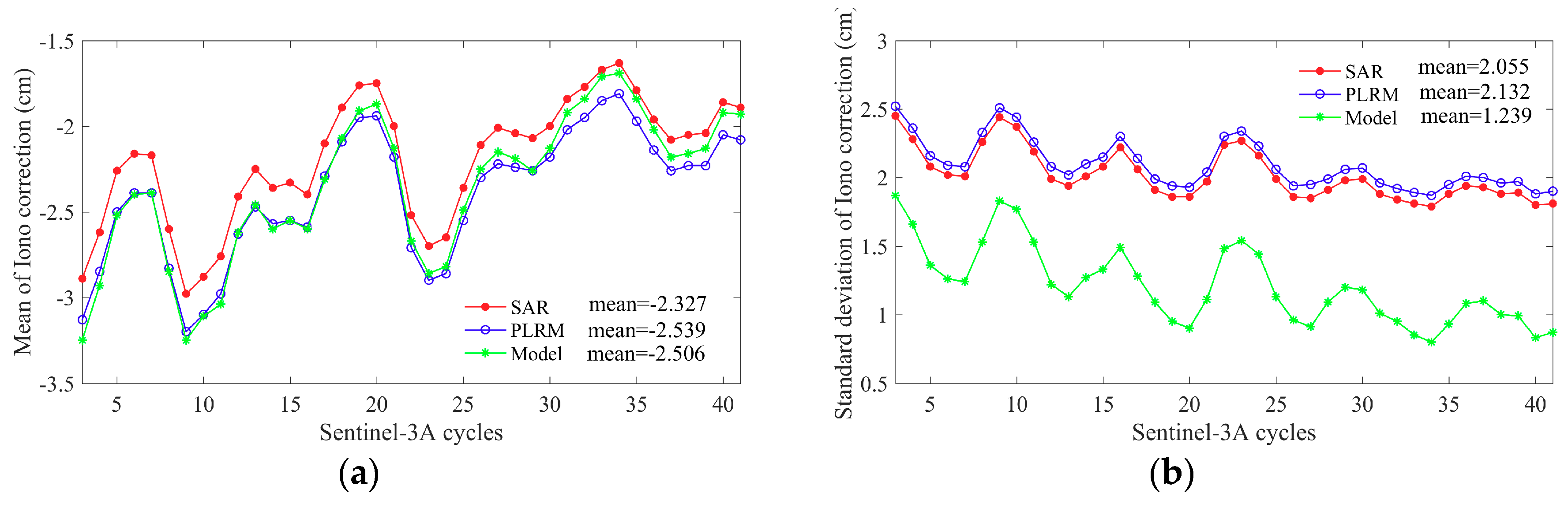
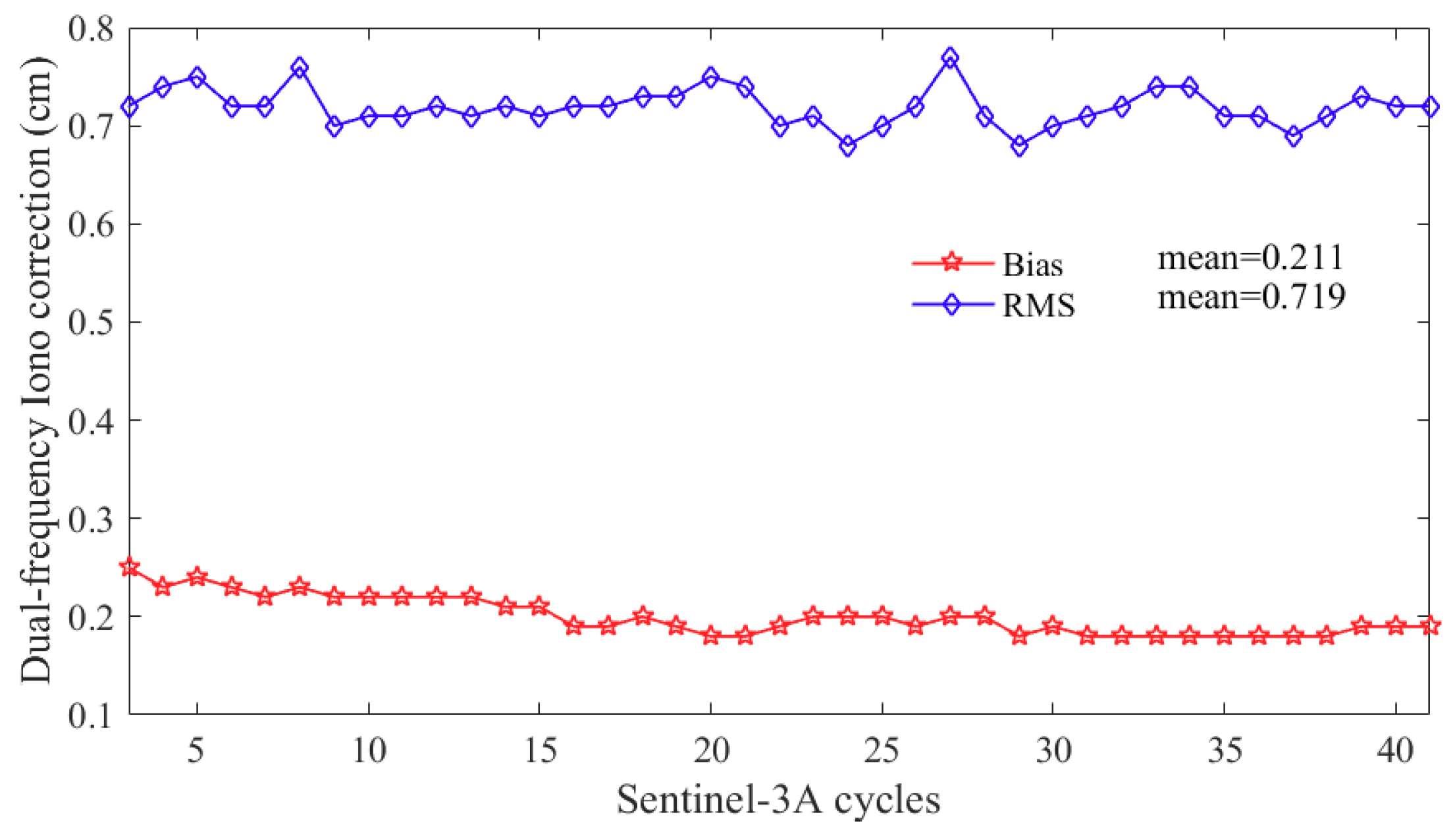
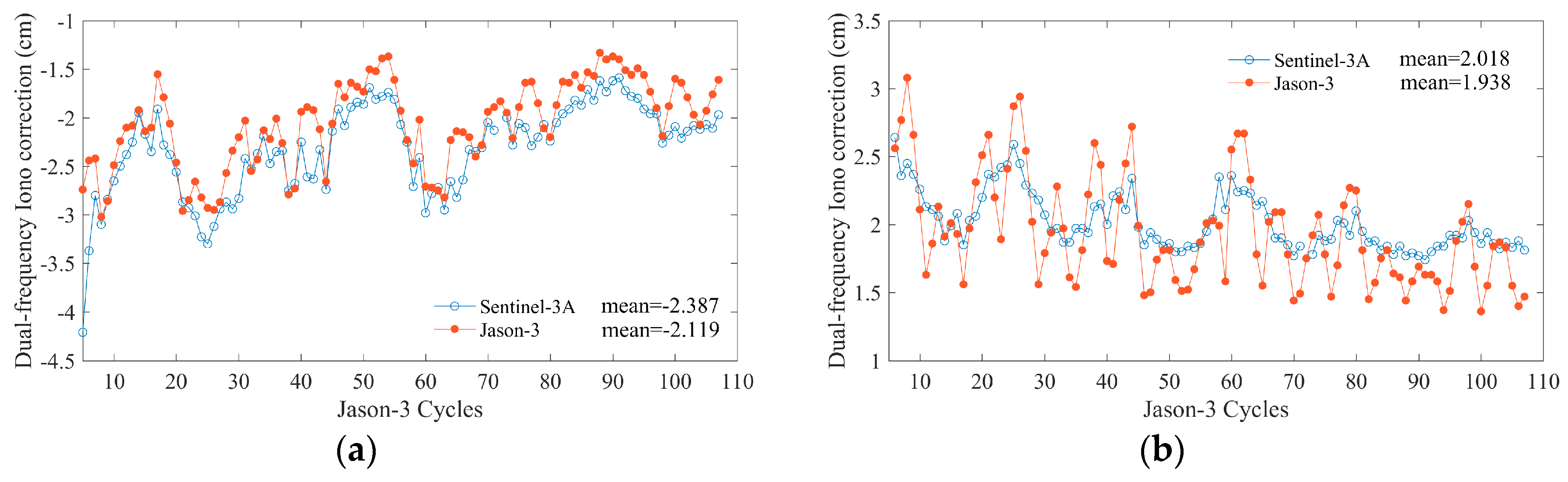
3.2.2. Ionospheric Correction
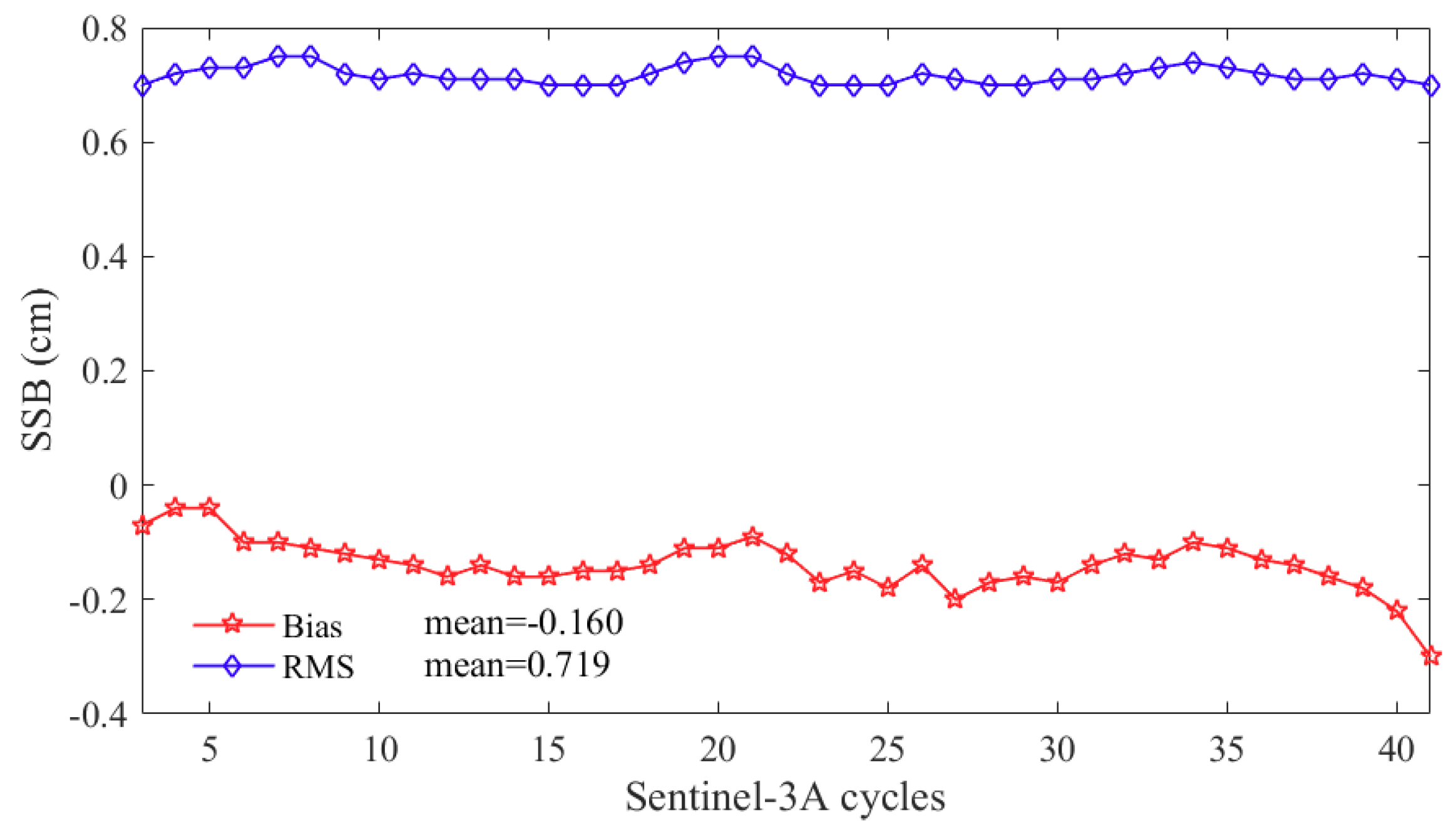
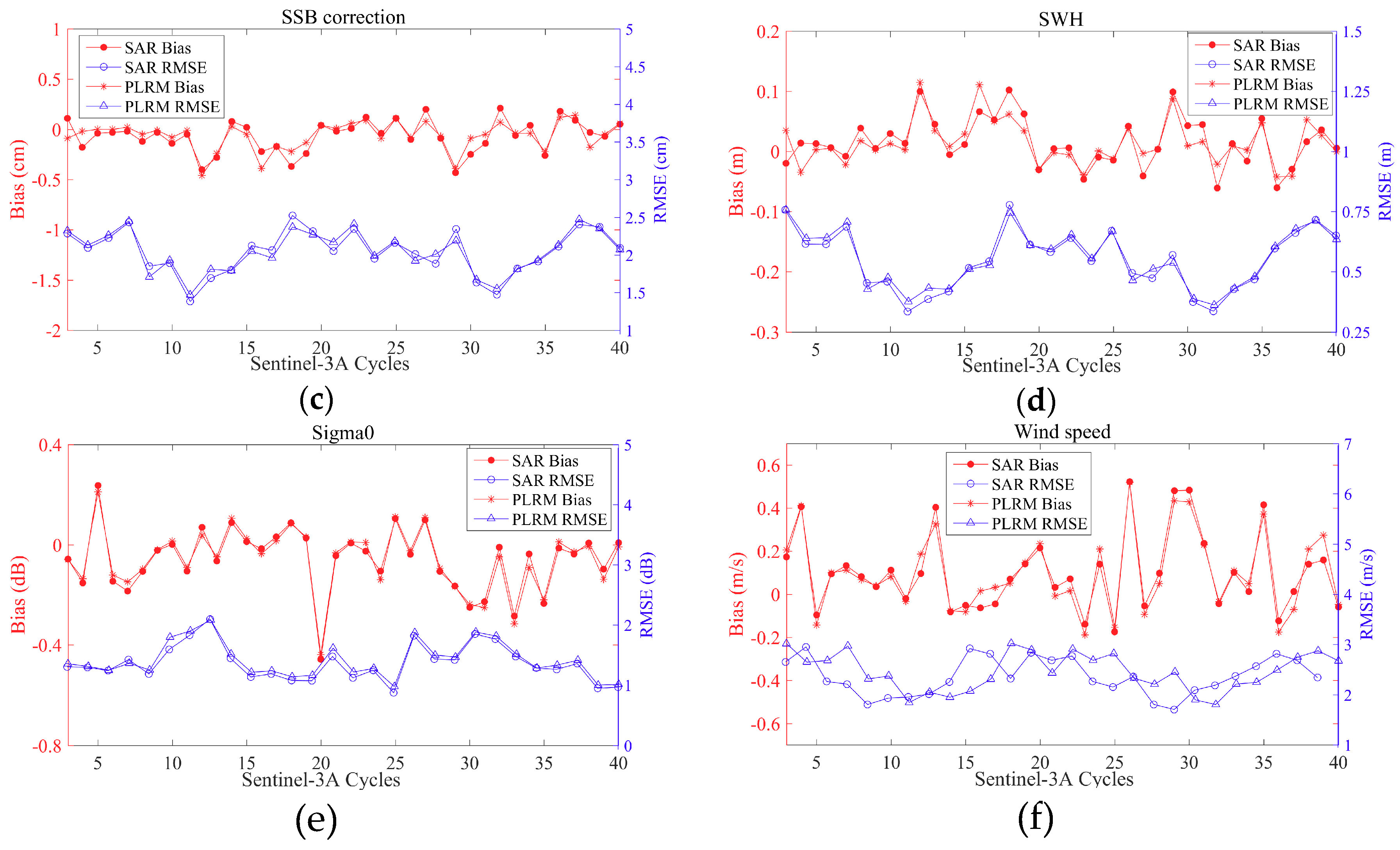
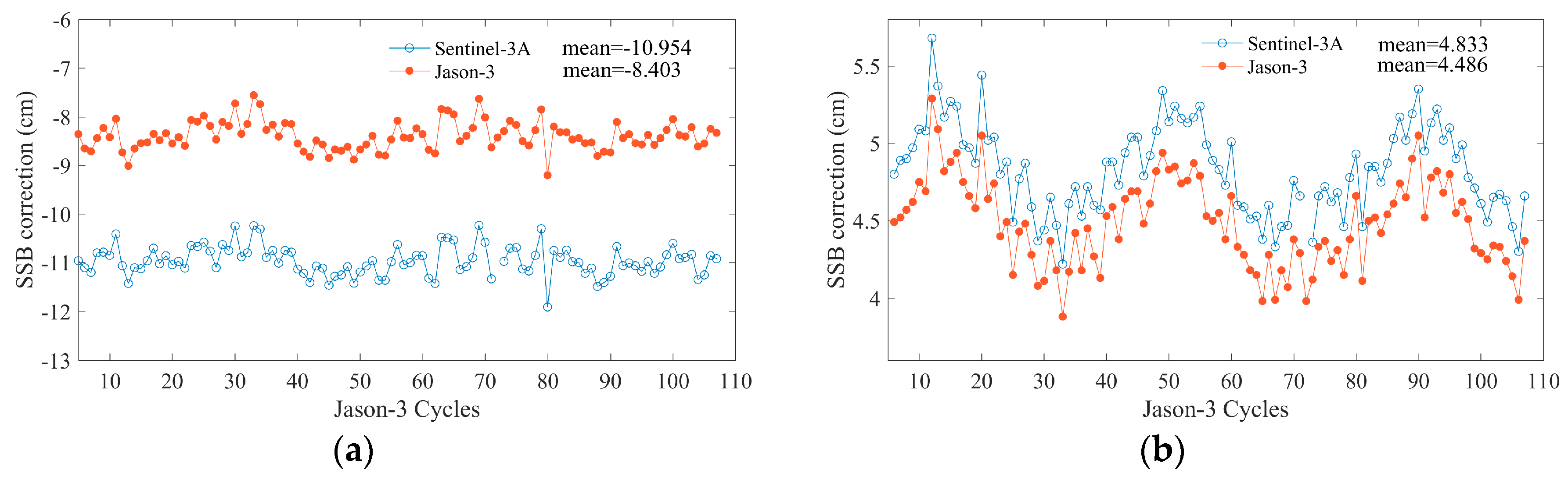
3.2.3. Sea State Bias (SSB) Correction
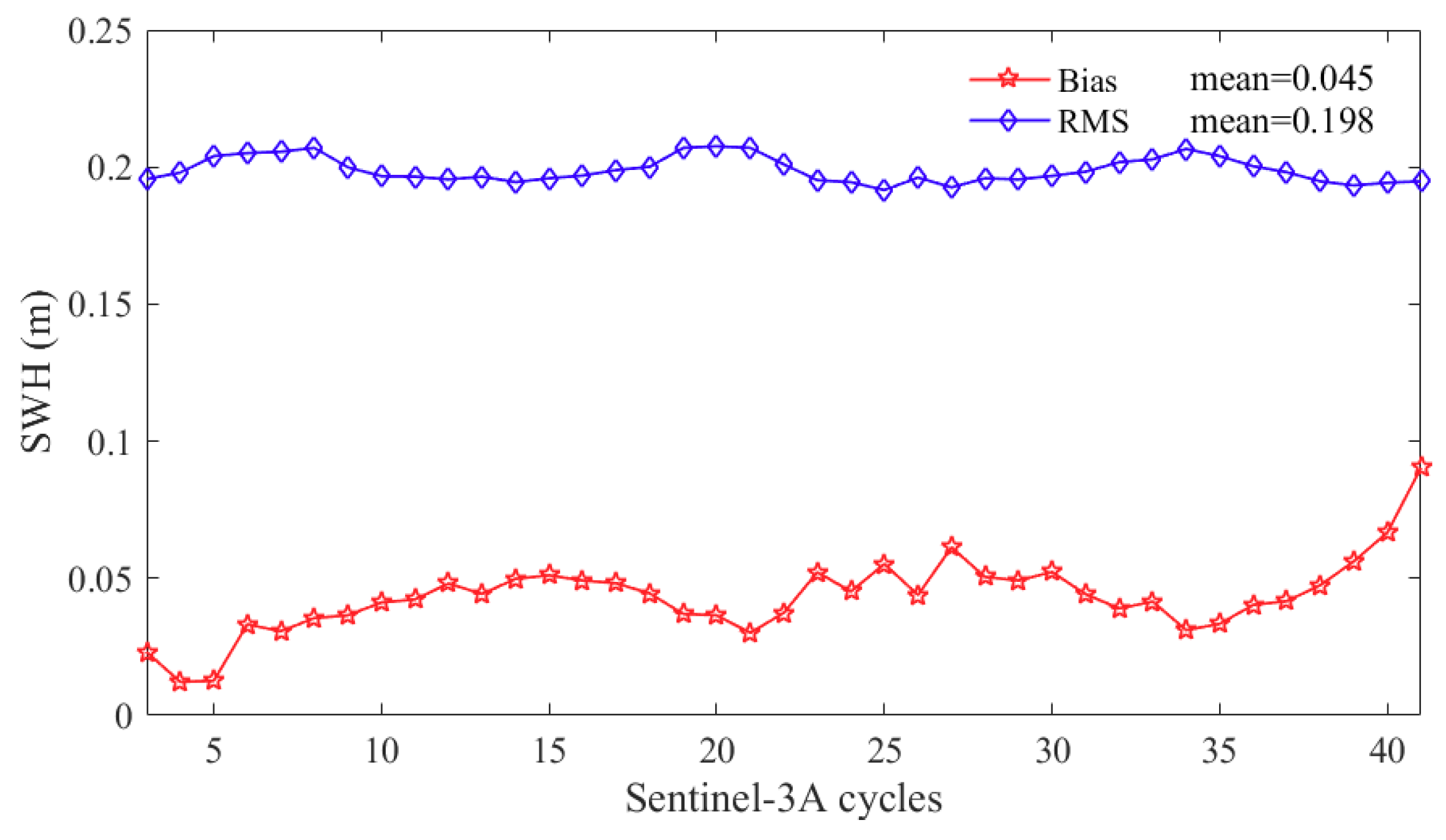
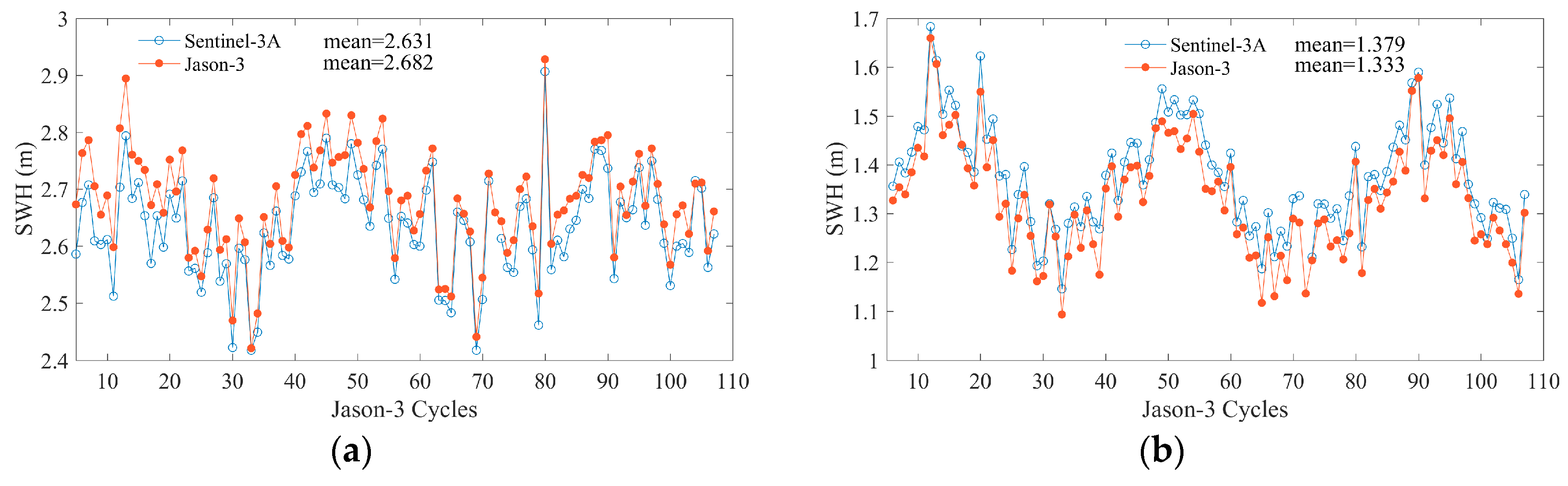
3.2.4. Significant Wave Height
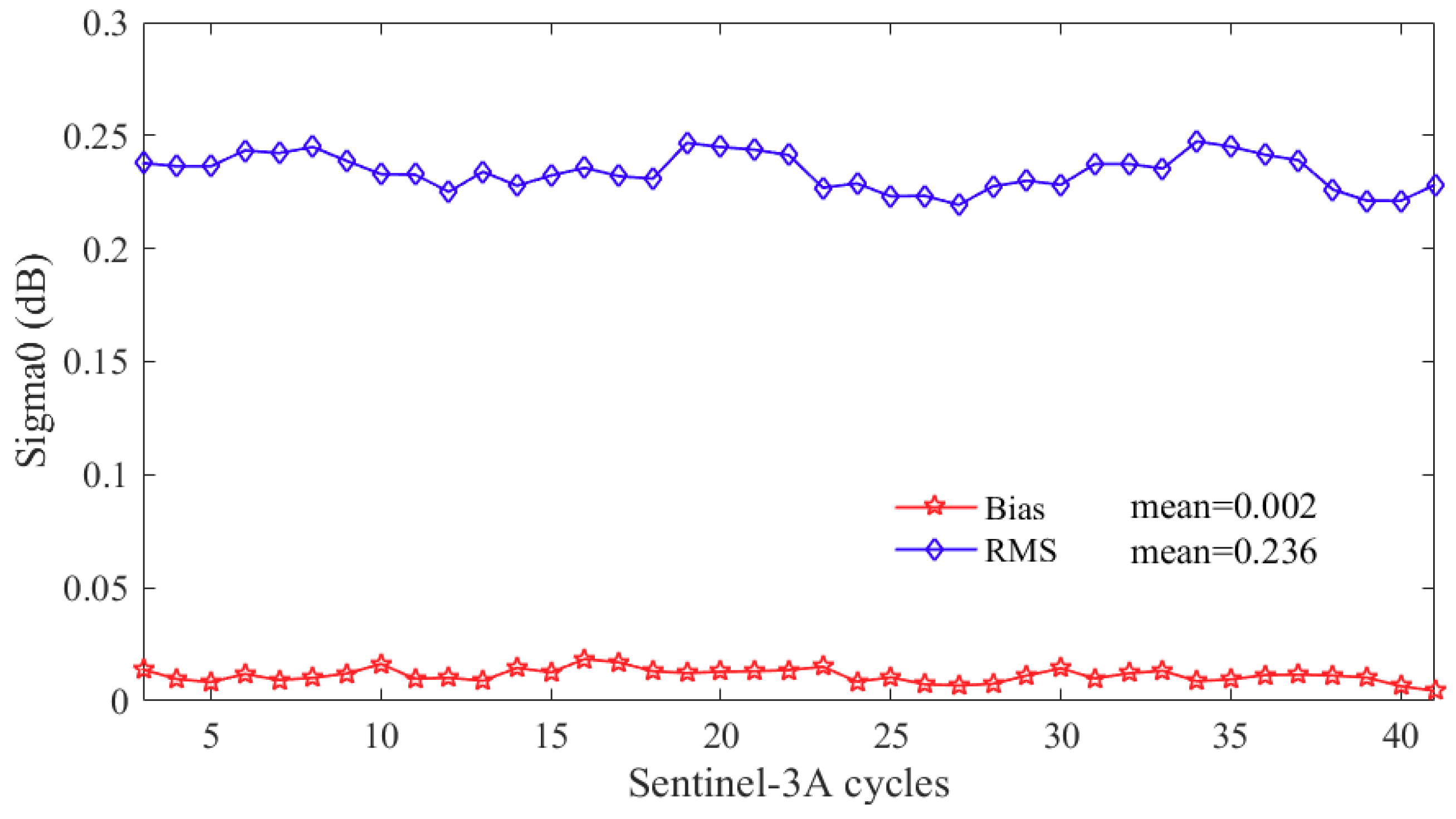
3.2.5. Backscattering Coefficient (Sigma0)
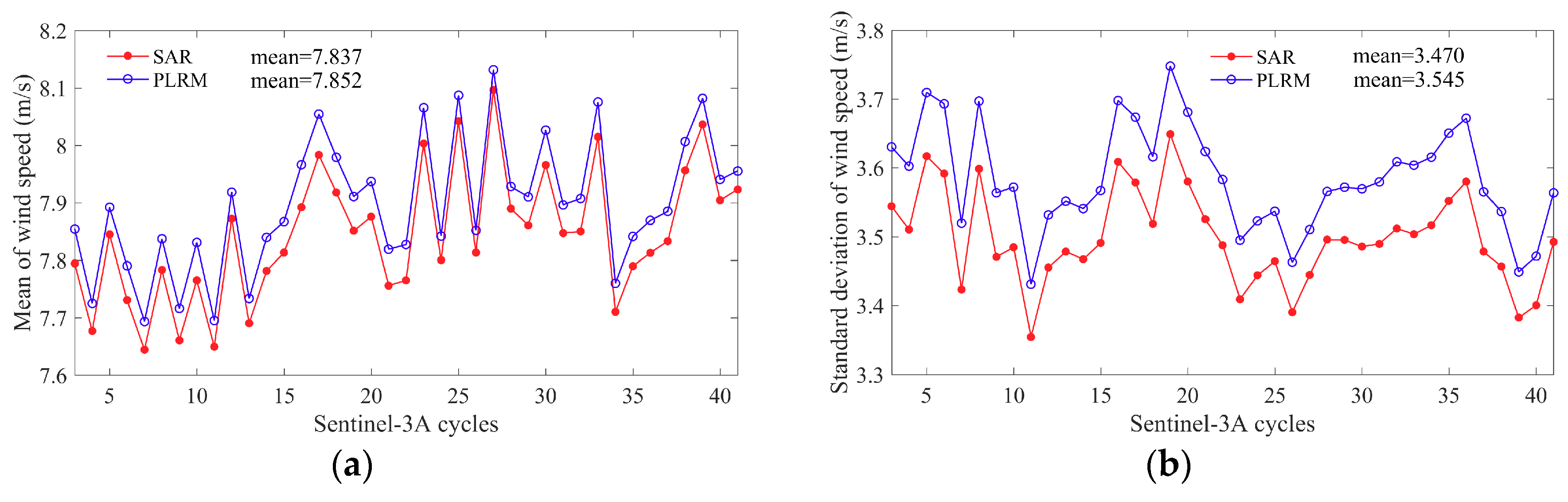
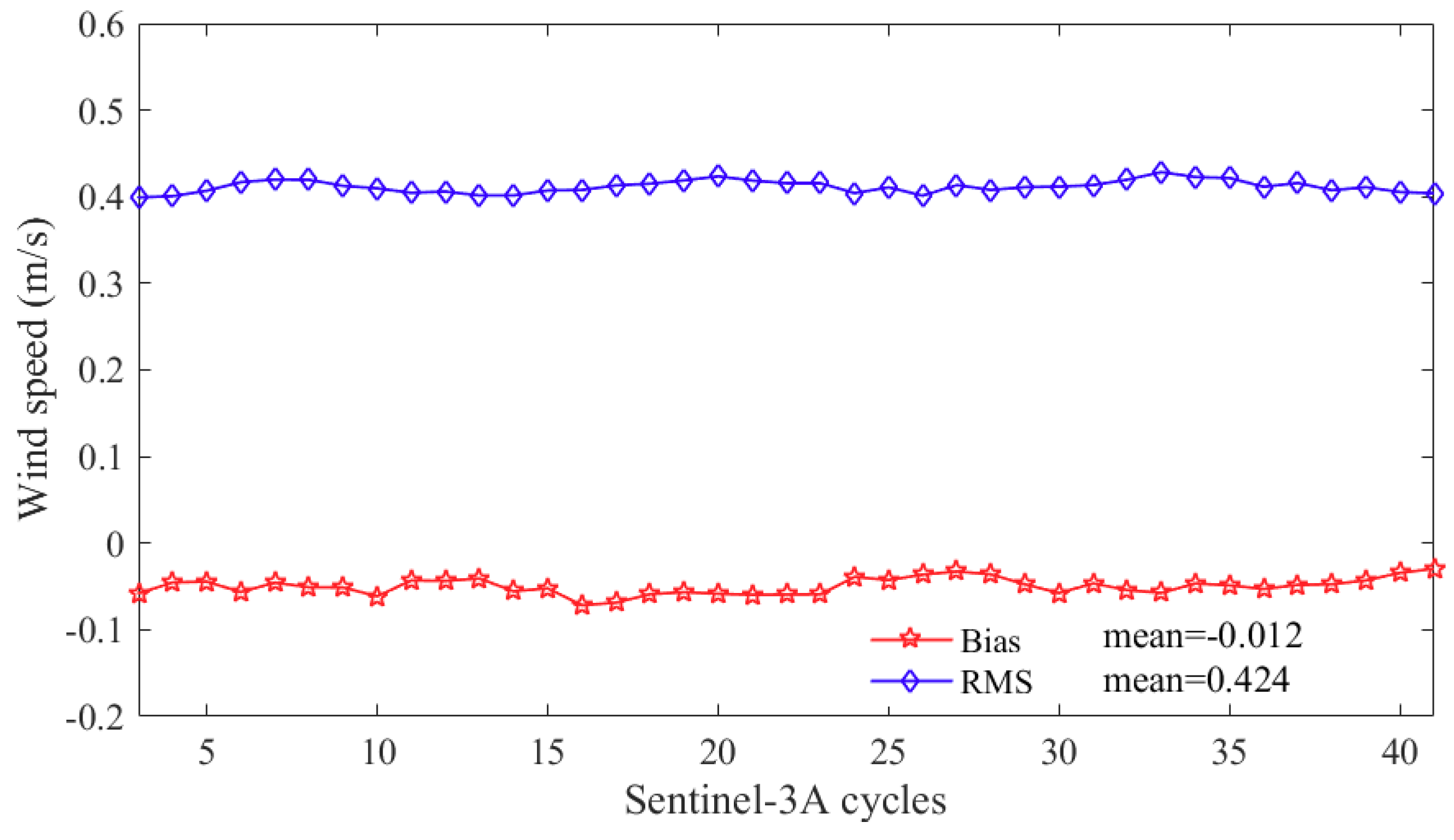
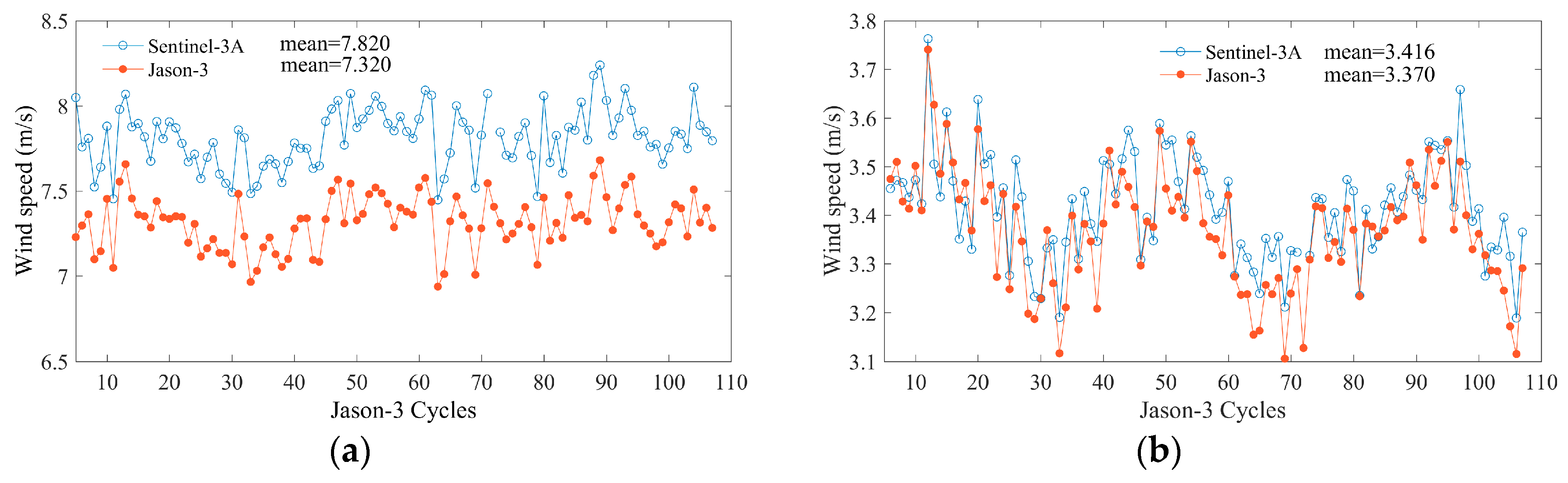
3.2.6. Wind Speed
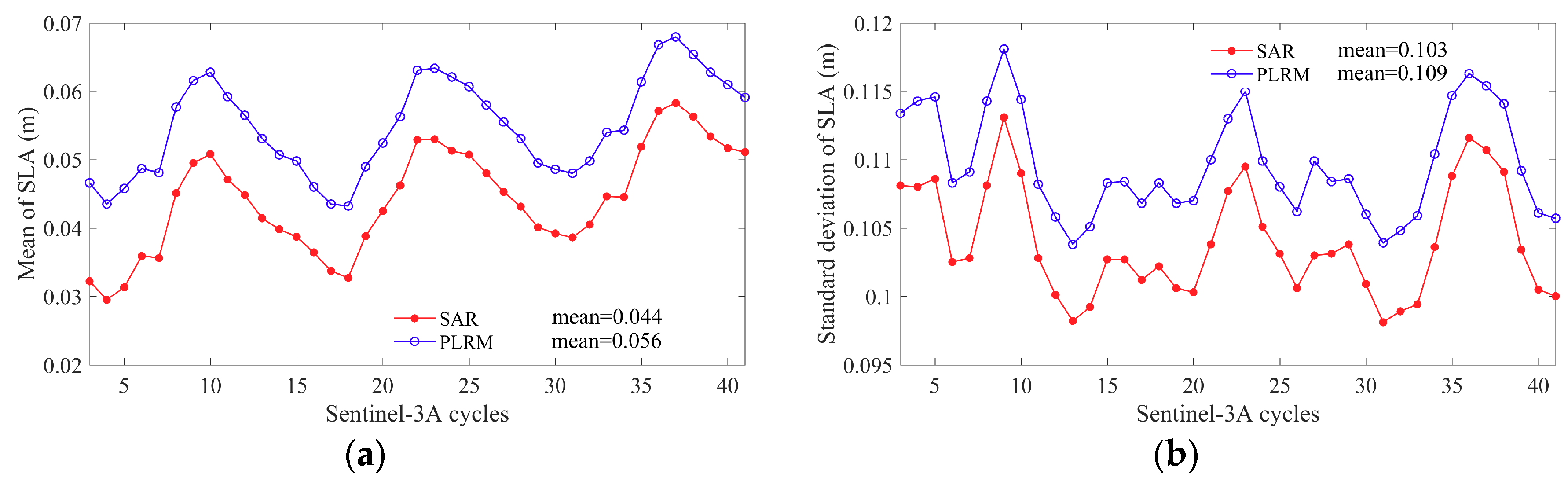
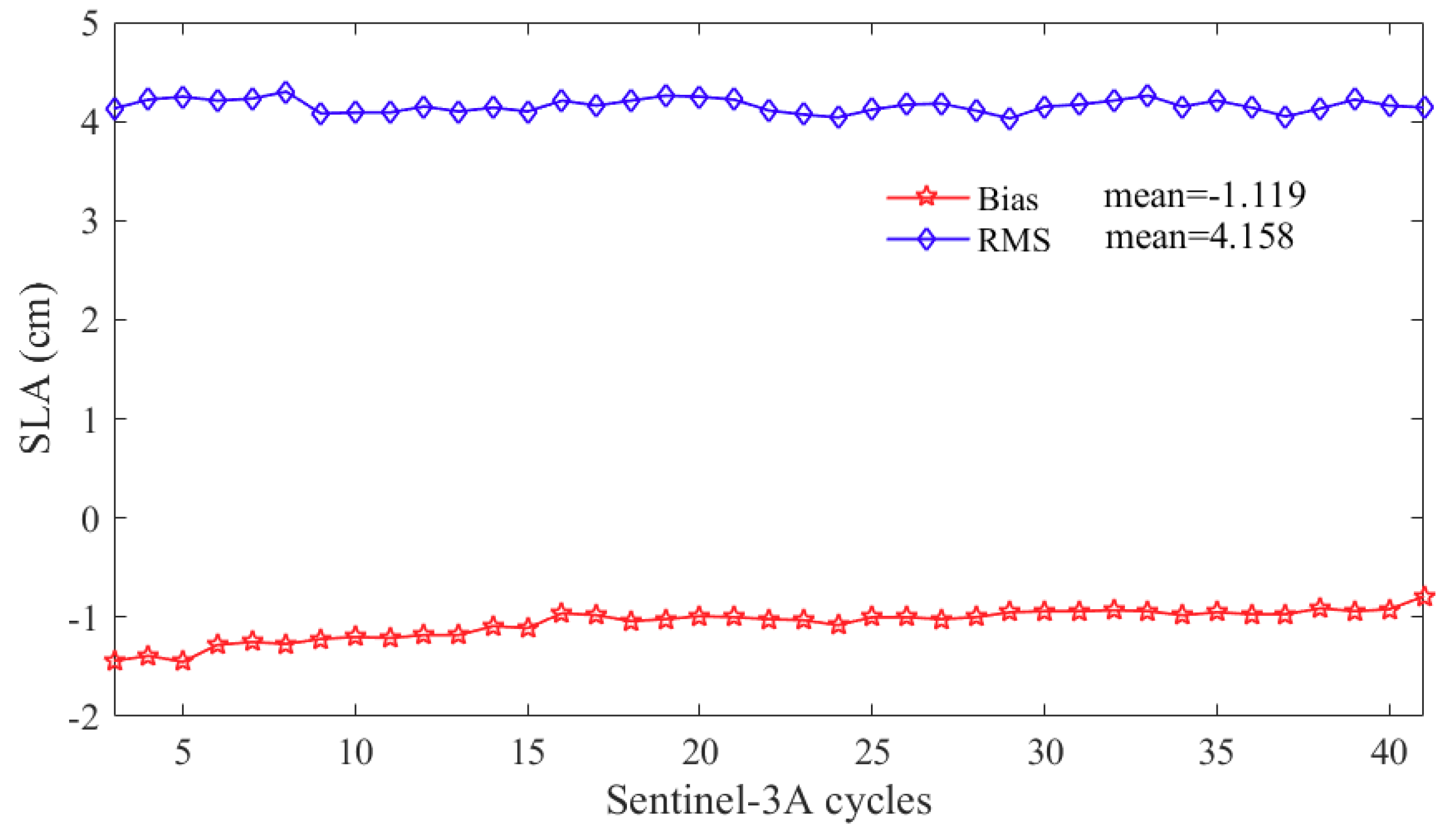
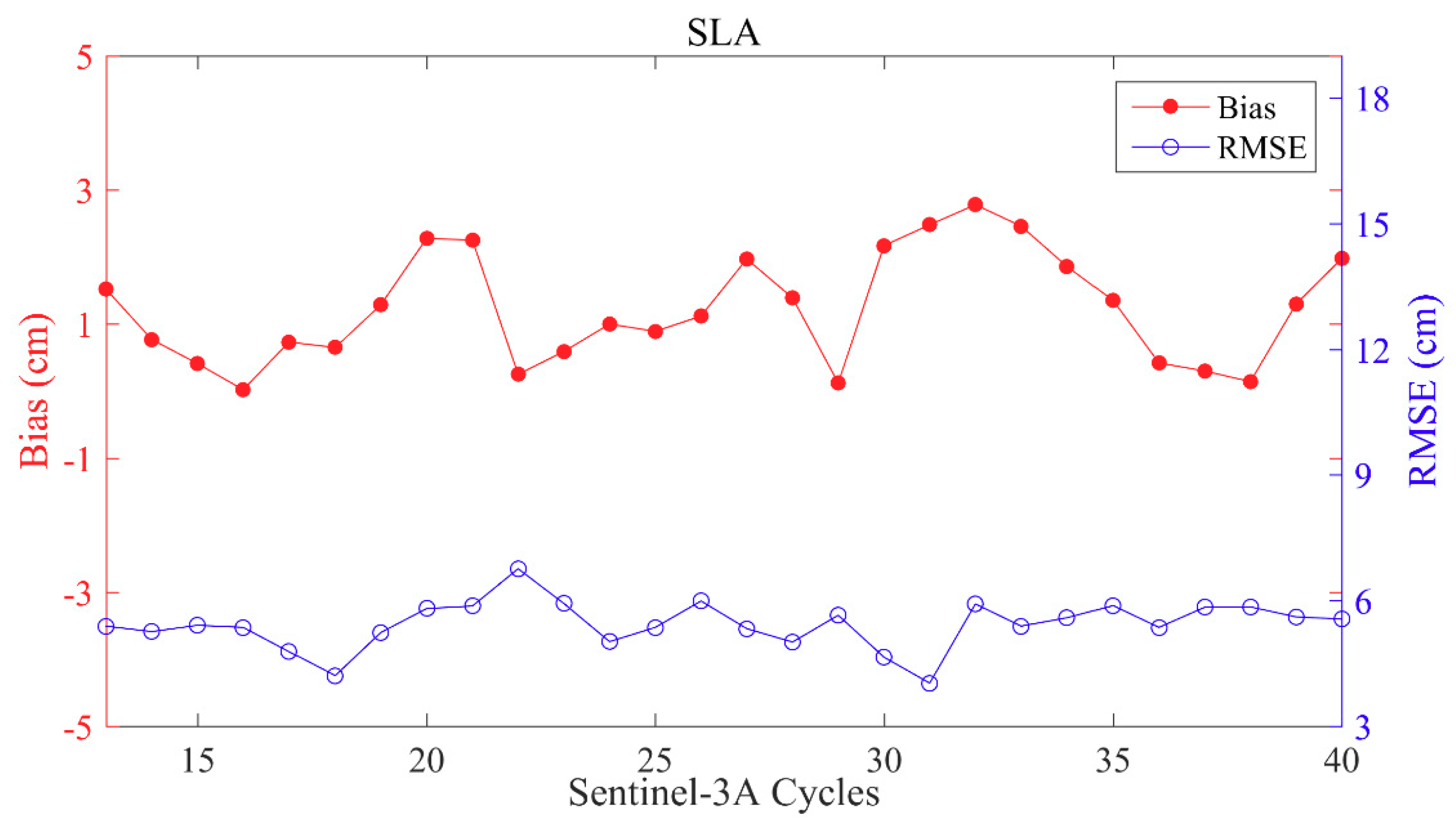
3.2.7. Sea Surface Height
3.3. Comparisons at Self-Crossovers
3.4. Comparisons with Jason-3
3.4.1. Cross-Calibration with Jason-3
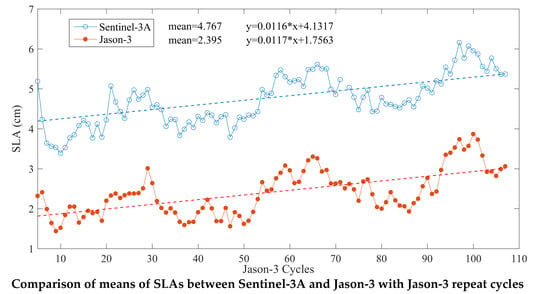
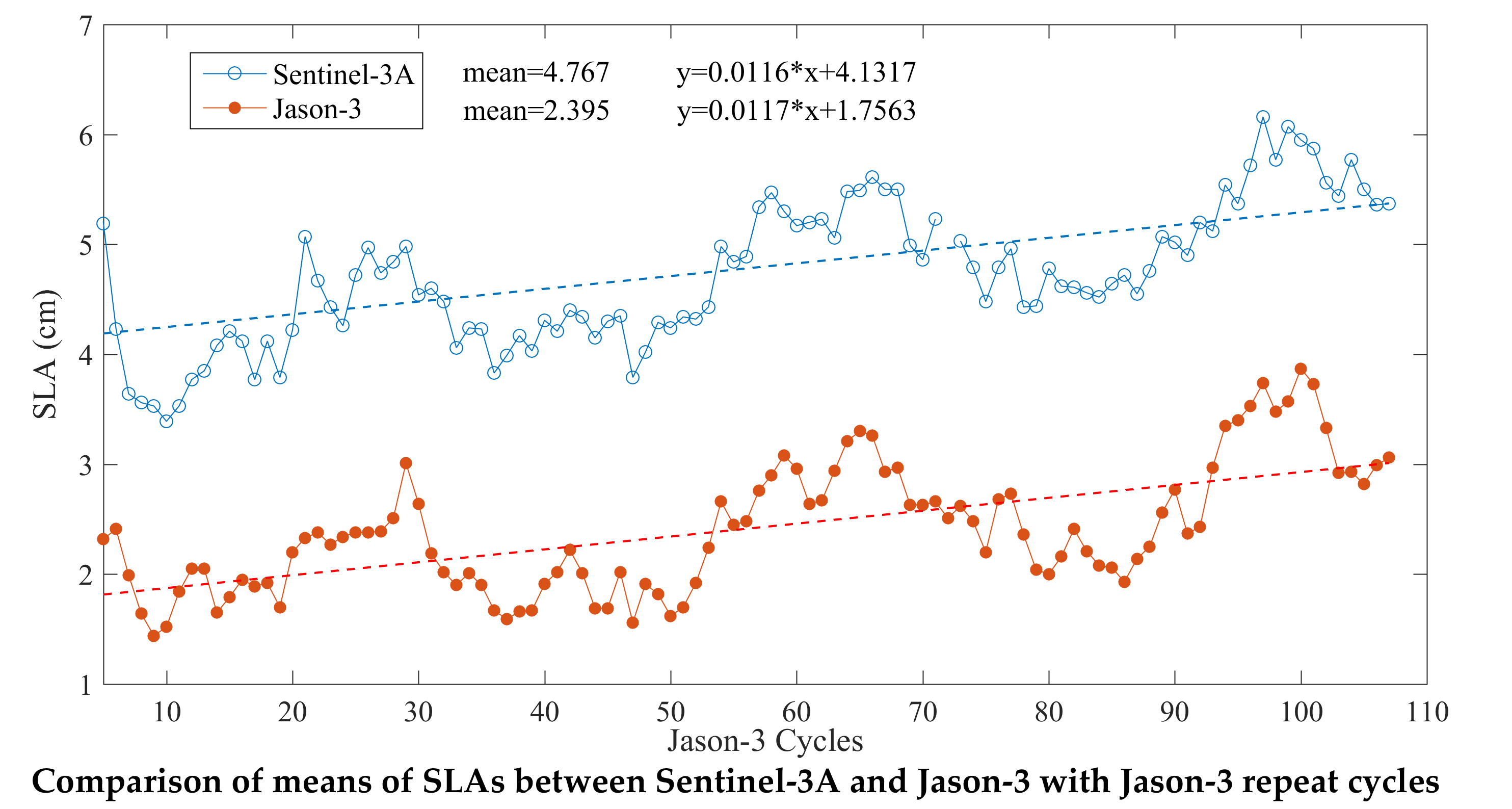
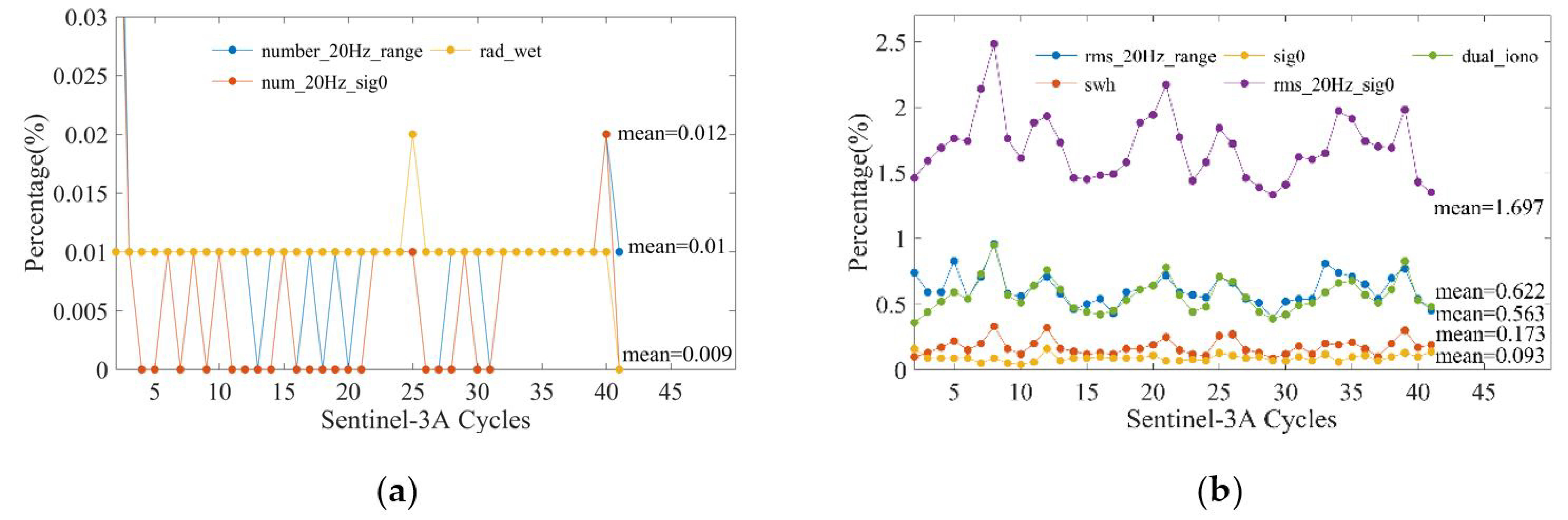
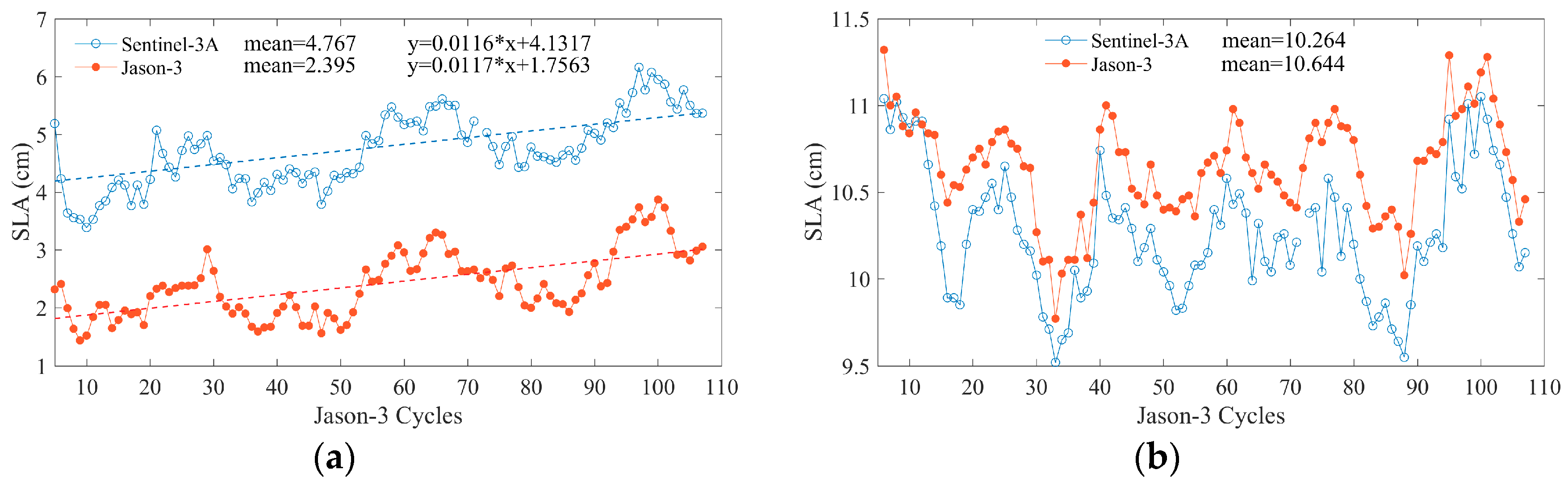
3.4.2. Cycle by Cycle Statistical Analysis on Jason-3 Cycle
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Donlon, C.; Berruti, B.; Buongiorno, A.; Ferreira, M.H.; Femenias, P.; Frerick, J.; Goryl, P.; Klein, U.; Laur, H.; Mavrocordatos, C.; et al. The Global Monitoring for Environment and Security (GMES) Sentinel-3 mission. Remote Sens. Environ. 2012, 120, 37–57. [Google Scholar] [CrossRef]
- Le Roy, Y.; Deschaux-Beaume, M.; Mavrocordatos, C.; Aguirre, M.; Heliere, F. SRAL SAR radar altimeter for sentinel-3 mission. In Proceedings of the 2007 IEEE International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–28 July 2007. [Google Scholar]
- Le Roy, Y.; Deschaux-Beaume, M.; Mavrocordatos, C.; Borde, F. SRAL, A radar altimeter designed to measure a wide range of surface types. In Proceedings of the 2009 IEEE International Geoscience and Remote Sensing Symposium, Cape Town, South Africa, 12–17 July 2009. [Google Scholar] [CrossRef]
- Mitchum, G.T. Monitoring the Stability of Satellite Altimeters with Tide Gauges. J. Atmos. Ocean. Technol. 1998, 15, 721–730. [Google Scholar] [CrossRef]
- Vincent, P.; Desai, S.D.; Dorandeu, J.; Ablain, M.; Soussi, B.; Callahan, P.S.; Haines, B.J. Jason-1 Geophysical Performance Evaluation. Mar. Geod. 2003, 26, 167–186. [Google Scholar] [CrossRef]
- Perbos, J.; Escudier, P.; Parisot, F.; Zaouche, G.; Vincent, P.; Menard, Y.; Manon, F.; Kunstmann, G.; Royer, D.; Fu, L.L. Jason-1: Assessement of the System Performances. Mar. Geod. 2003, 26, 147–157. [Google Scholar] [CrossRef]
- Dorandeu, J.; Ablain, M.; Faugere, Y.; Mertz, F.; Soussi, B.; Vincent, P. Jason-1 global statistical evaluation and performance assessment: Calibration and cross-calibration results. Mar. Geod. 2004, 27, 345–372. [Google Scholar] [CrossRef]
- Ablain, M.; Philipps, S.; Picot, N.; Bronner, E. Jason-2 Global Statistical Assessment and Cross-Calibration with Jason-1. Mar. Geod. 2010, 33, 162–185. [Google Scholar] [CrossRef]
- Ablain, M.; Philipps, S.; Thibaut, P.; Picot, N.; Lombard, A. Global Quality Assessment of Jason-2 measurements and consistency with Jason-1. In Proceedings of the AGU 2008 Fall Meeting, San Francisco, CA, USA, 15–19 December 2008. [Google Scholar]
- Faugere, Y.; Dorandeu, J.; Lefevre, F.; Picot, N.; Femenias, P. Envisat Ocean Altimetry Performance Assessment and Cross-calibration. Sensors 2006, 6, 100–130. [Google Scholar] [CrossRef] [Green Version]
- Prandi, P.; Philipps, S.; Pignot, V.; Picot, N. SARAL/AltiKa Global Statistical Assessment and Cross-Calibration with Jason-2. Mar. Geod. 2015, 38, 297–312. [Google Scholar] [CrossRef]
- Dettmering, D.; Schwatke, C.; Bosch, W. Global Calibration of SARAL/AltiKa Using Multi-Mission Sea Surface Height Crossovers. Mar. Geod. 2015, 38, 206–218. [Google Scholar] [CrossRef]
- Data Product Quality Reports. Available online: https://sentinel.esa.int/web/sentinel/technical-guides/sentinel-3-altimetry/data-quality-reports (accessed on 15 May 2019).
- Jason-3 GDR Quality Assessment Report Cycle 094 (SALP-RP-JALT3-EX-23103-CLS094). Available online: ftp://avisoftp.cnes.fr/Niveau0/AVISO/pub/jason-3/gdr_d_validation_report (accessed on 13 June 2019).
- Sentinel-3 SRAL Marine User Handbook (EUM/OPS-SEN3/MAN/17/920901, v1A e-signed). Available online: https://www.eumetsat.int/website/wcm/idc/idcplg?IdcService=GET_FILE&dDocName=PDF_S3_SRAL_HANDBOOK&RevisionSelectionMethod=LatestReleased&Rendition=Web (accessed on 5 May 2019).
- Gao, B.; Chan, P.K.; Li, R. A global water vapor data set obtained by merging the SSMI and MODIS data. Geophys. Res. Lett. 2004, 31. [Google Scholar] [CrossRef]
- Yang, J.G.; Zhang, J. Validation of Sentinel-3A/3B Satellite Altimetry Wave Heights with Buoys and Jason-3 Data. Sensors 2019, 19, 2914. [Google Scholar] [CrossRef]































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Ku Band | C Band |
|---|---|---|
| Frequency | 13.575 GHz | 5.41 GHz |
| Bandwidth | 350 MHz | 320 MHz |
| Tracking modes | Closed loop and open loop | |
| LRM pulse repetition frequency | 1920 Hz | |
| SAR mode pulse repetition frequency | 18 kHz | |
| SAR along track solution | ~300 m | |
| Parameter | Minimum | Maximum |
|---|---|---|
| Orbit-Range | −130 m | 100 m |
| Sea level Anomaly | −2 m | 2 m |
| Number of 20 Hz range measurements | 10 | - |
| Standard deviation of 20 Hz range measurements | 0 m | 0.2 m |
| Dry tropospheric correction | −2.5 m | −1.9 m |
| Wet tropospheric correction | −0.5 m | −0.001 m |
| Dual frequency ionosphere correction | −0.4 m | 0.04 m |
| Sea state bias correction | −0.5 m | 0 m |
| Backscattering coefficient | 5.0 dB | 28.0 dB |
| Standard deviation of 20 Hz Sigma0 measurements | 0 dB | 0.7 dB |
| Number of 20 Hz Sigma0 measurements | 10 | - |
| Significant wave height | 0 m | 11 m |
| Wind speed | 0 m/s | 30 m/s |
| Ocean tide | −5 m | 5 m |
| Solid earth tide | −1 m | 1 m |
| Pole tide | −0.15 m | 0.15 m |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, J.; Zhang, J.; Wang, C. Sentinel-3A SRAL Global Statistical Assessment and Cross-Calibration with Jason-3. Remote Sens. 2019, 11, 1573. https://doi.org/10.3390/rs11131573
Yang J, Zhang J, Wang C. Sentinel-3A SRAL Global Statistical Assessment and Cross-Calibration with Jason-3. Remote Sensing. 2019; 11(13):1573. https://doi.org/10.3390/rs11131573
Chicago/Turabian StyleYang, Jungang, Jie Zhang, and Changying Wang. 2019. "Sentinel-3A SRAL Global Statistical Assessment and Cross-Calibration with Jason-3" Remote Sensing 11, no. 13: 1573. https://doi.org/10.3390/rs11131573