The Use of UAV Mounted Sensors for Precise Detection of Bark Beetle Infestation

 ,
,  , , ,
, , ,
Abstract
:
1. Introduction
2. Materials and Methods
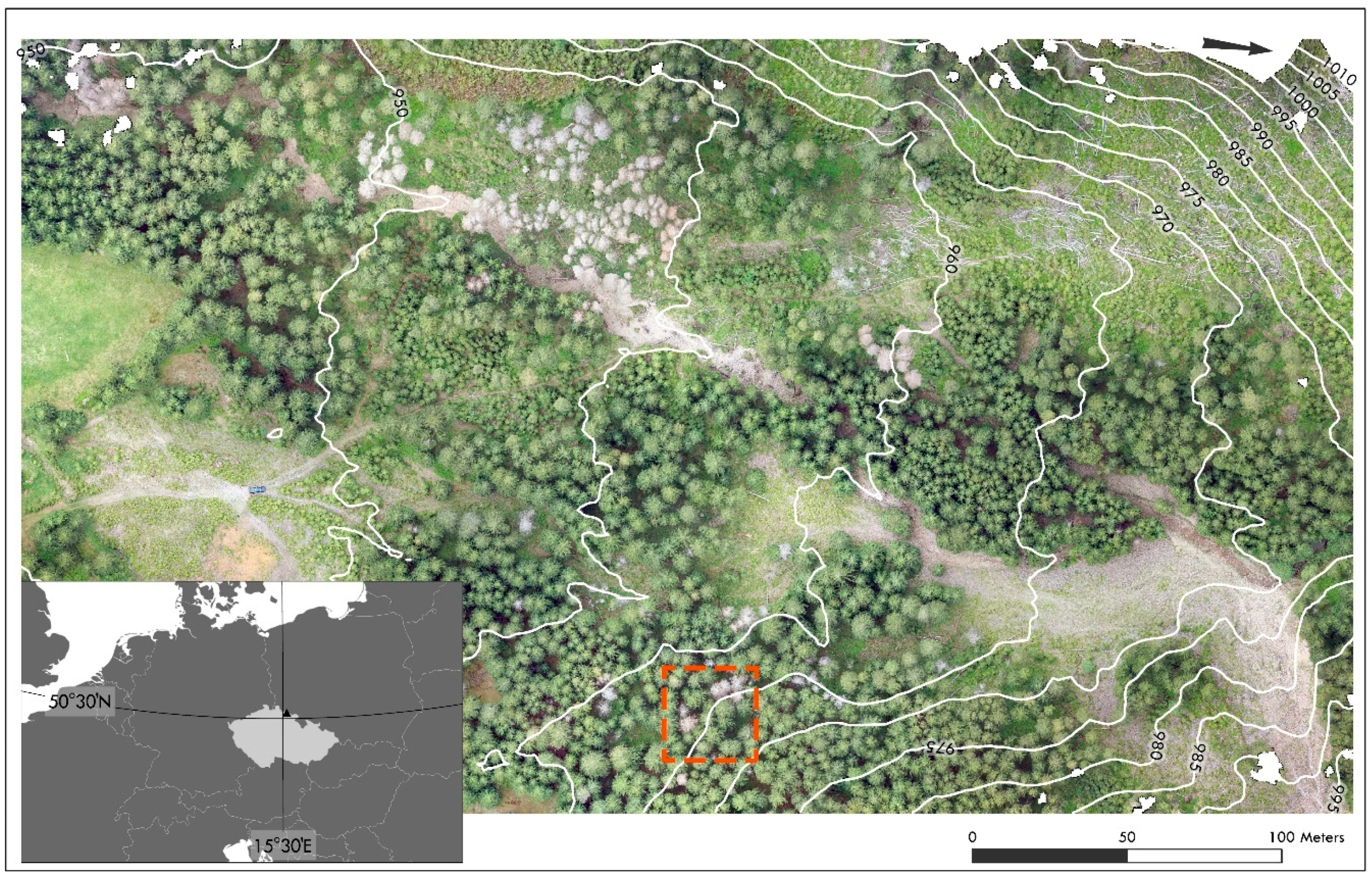
2.1. Study Site
2.2. Acquisition and Processing of UAV Imagery
2.3. Image Analysis
2.4. Statistical Analysis
2.5. Image Classification
3. Results
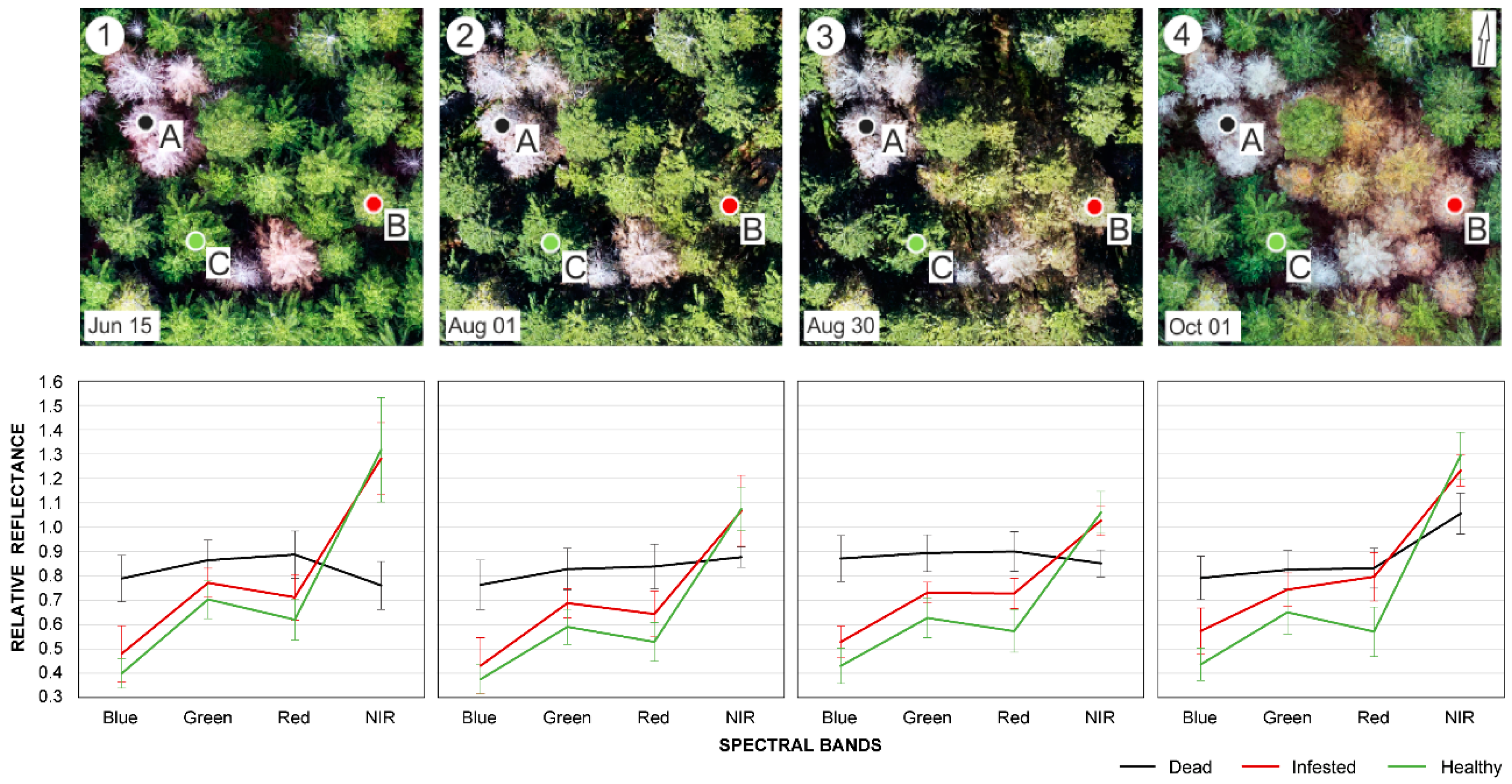
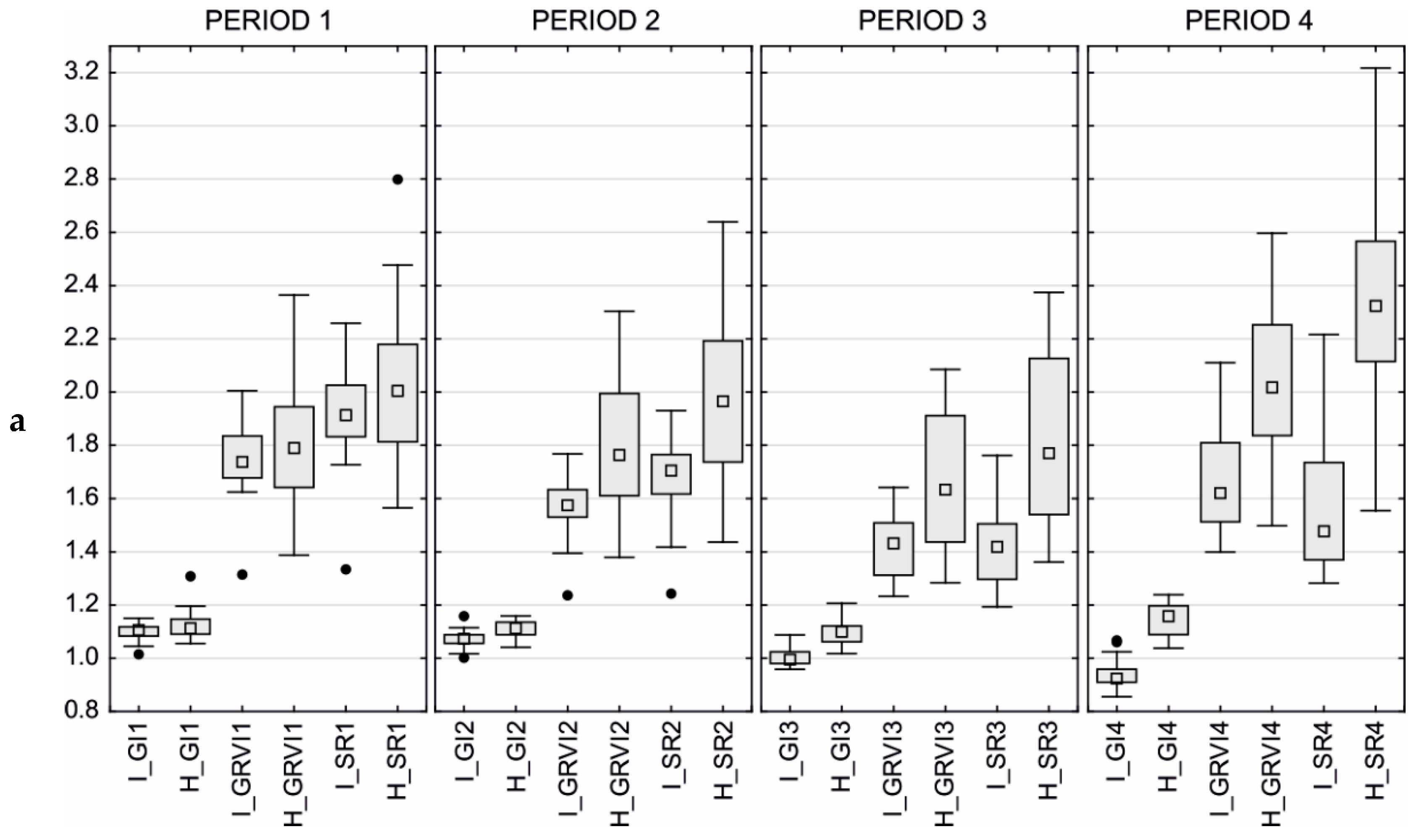
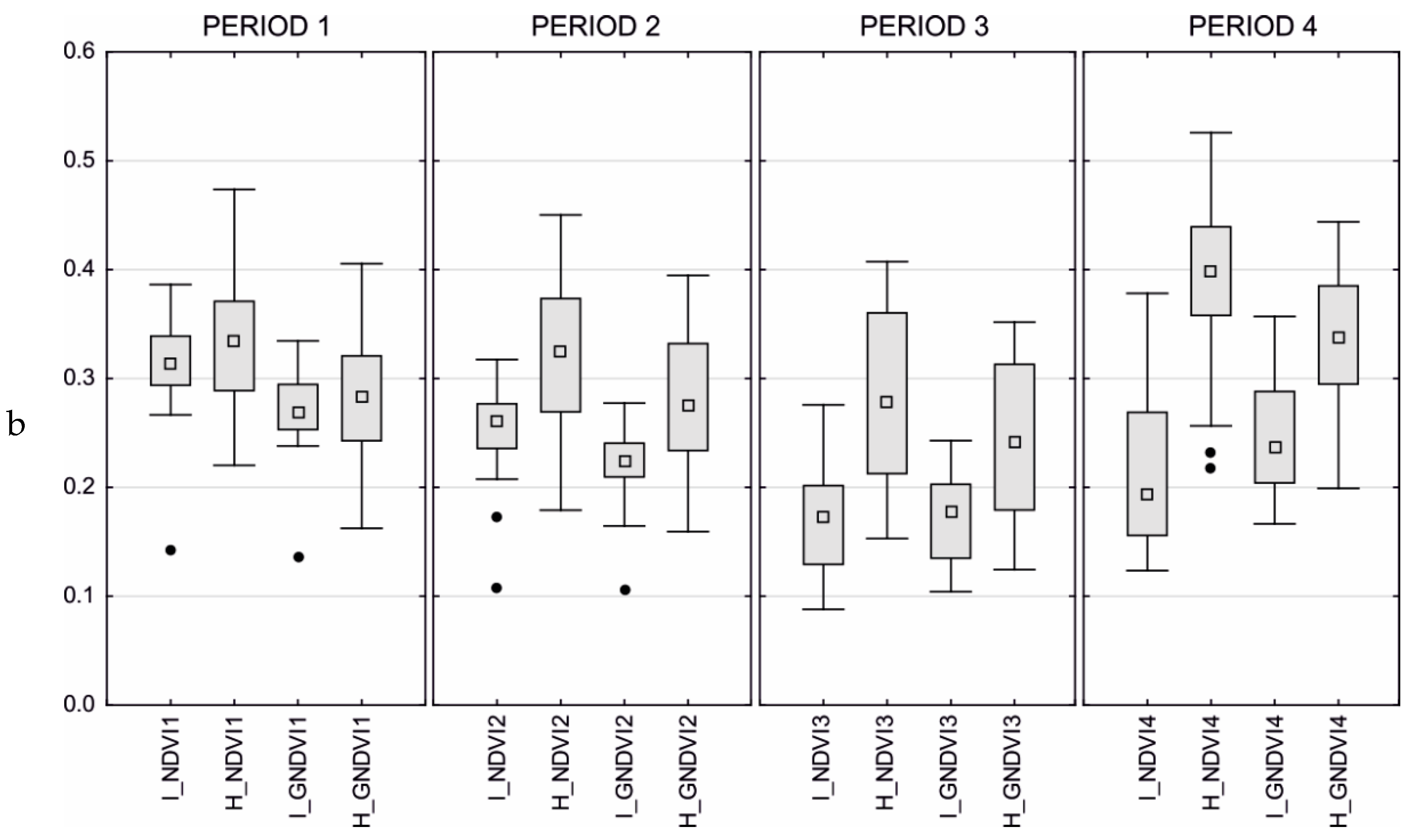
3.1. Spectral Comparison
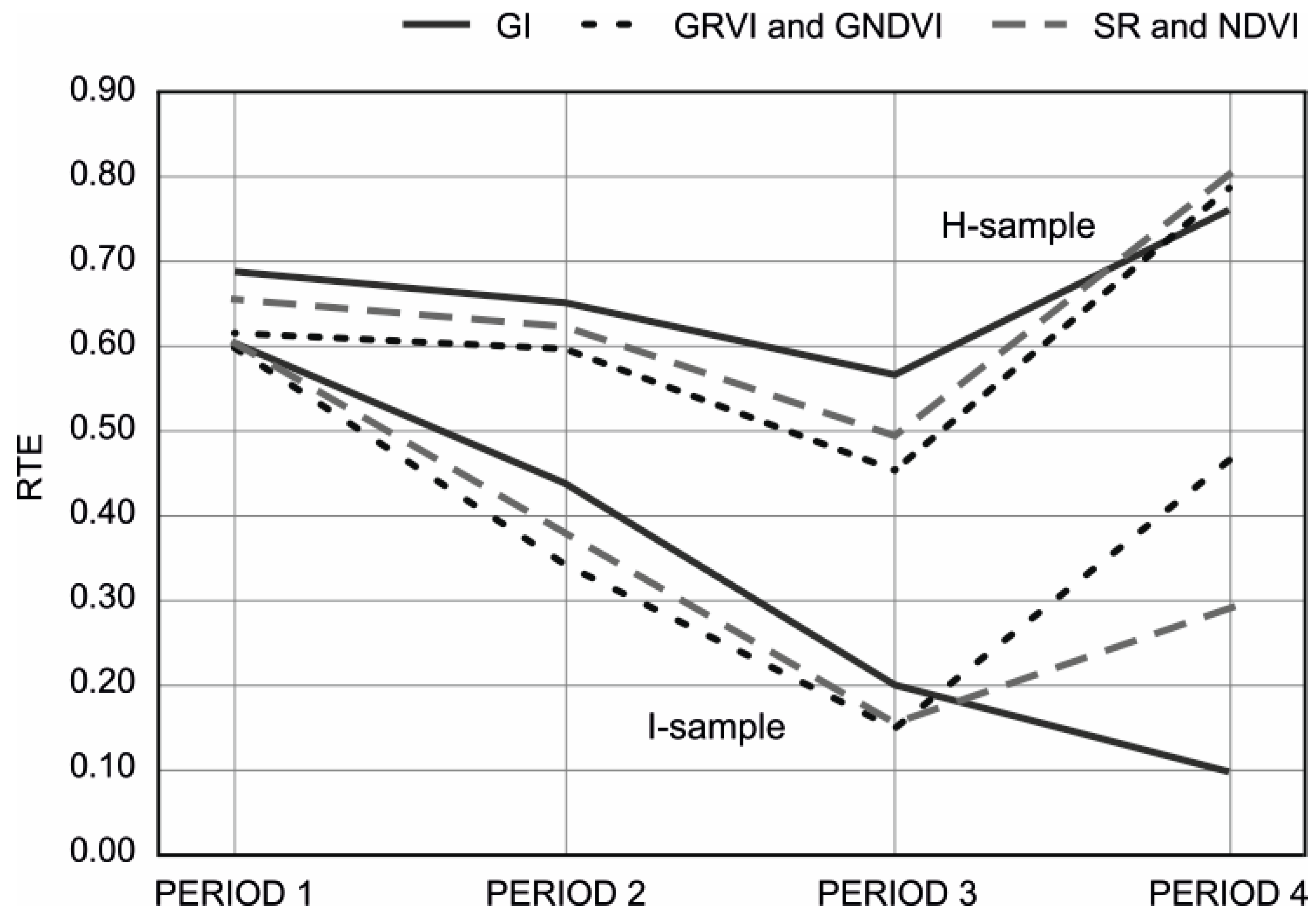
3.2. Statistical Evaluation
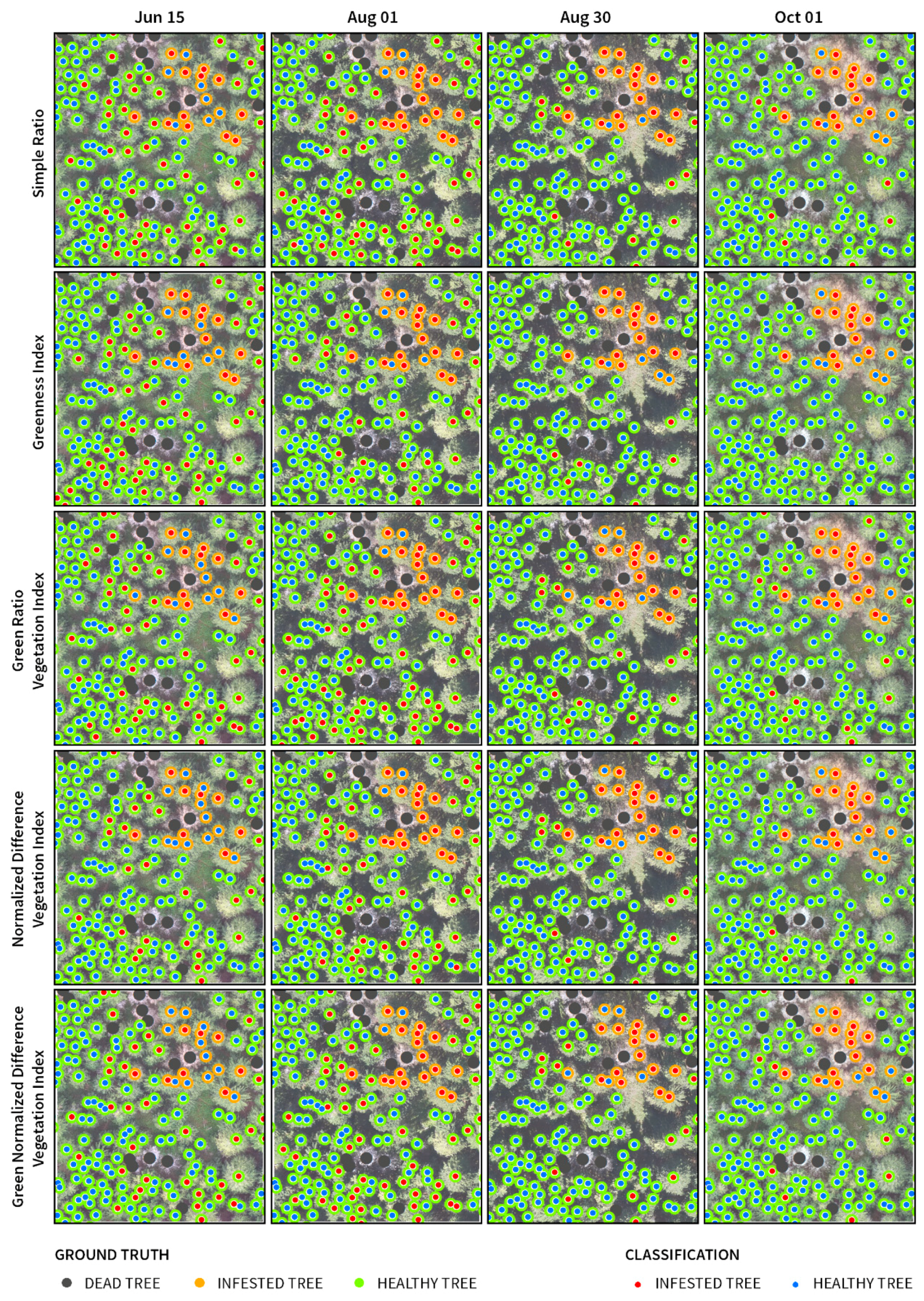
3.3. Image Classification
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Period 1 | Period 2 | Period 3 | Period 4 | |
|---|---|---|---|---|
| SR | H: 2.090 ± 0.299 | H: 2.065 ± 0.328 | H: 1.817 ± 0.320 | H: 2.226 ± 0.439 |
| I: 1.901 ± 0.231 | I: 1.653 ± 0.215 | I: 1.364 ± 0.146 | I: 1.530 ± 0.283 | |
| GI | H: 1.132 ± 0.043 | H: 1.114 ± 0.041 | H: 1.096 ± 0.036 | H: 1.138 ± 0.059 |
| I: 1.105 ± 0.043 | I: 1.073 ± 0.044 | I: 0.995 ± 0.036 | I: 0.929 ± 0.051 | |
| GRVI | H: 1.844 ± 0.223 | H: 1.849 ± 0.240 | H: 1.652 ± 0.249 | H: 1.945 ± 0.301 |
| I: 1.717 ± 0.160 | I: 1.535 ± 0.148 | I: 1.368 ± 0.105 | I: 1.638 ± 0.220 | |
| NDVI | H: 0.347 ± 0.064 | H: 0.340 ± 0.068 | H: 0.281 ± 0.081 | H: 0.369 ± 0.085 |
| I: 0.306 ± 0.062 | I: 0.241 ± 0.064 | I: 0.151 ± 0.050 | I: 0.201 ± 0.078 | |
| GNDVI | H: 0.292 ± 0.057 | H: 0.293 ± 0.058 | H: 0.239 ± 0.071 | H: 0.314 ± 0.070 |
| I: 0.261 ± 0.048 | I: 0.208 ± 0.047 | I: 0.154 ± 0.037 | I: 0.237 ± 0.060 |
Appendix C

References
- Seidl, R.; Thom, D.; Kautz, M.; Martin-Benito, D.; Peltoniemi, M.; Vacchiano, G.; Wild, J.; Ascoli, D.; Petr, M.; Honkaniemi, J.; et al. Forest disturbances under climate change. Nat. Clim. Chang. 2017, 7, 395–402. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Meigs, G.W.; Kennedy, R.E.; Cohen, W.B. A Landsat time series approach to characterize bark beetle and defoliator impacts on tree mortality and surface fuels in conifer forests. Remote Sens. Environ. 2011, 115, 3707–3718. [Google Scholar] [CrossRef]
- Raffa, K.F.; Aukema, B.H.; Bentz, B.J.; Carroll, A.L.; Hicke, J.A.; Turner, M.G.; Romme, W.H. Cross-scale Drivers of Natural Disturbances Prone to Anthropogenic Amplification: The Dynamics of Bark Beetle Eruptions. Bioscience 2008, 58, 501–517. [Google Scholar] [CrossRef] [Green Version]
- Näsi, R.; Honkavaara, E.; Lyytikäinen-Saarenmaa, P.; Blomqvist, M.; Litkey, P.; Hakala, T.; Viljanen, N.; Kantola, T.; Tanhuanpää, T.; Holopainen, M. Using UAV-based photogrammetry and hyperspectral imaging for mapping bark beetle damage at tree-level. Remote Sens. 2015, 7, 15467–15493. [Google Scholar] [CrossRef]
- Fassnacht, F.E.; Latifi, H.; Ghosh, A.; Joshi, P.K.; Koch, B. Assessing the potential of hyperspectral imagery to map bark beetle-induced tree mortality. Remote Sens. Environ. 2014, 140, 533–548. [Google Scholar] [CrossRef]
- Latifi, H.; Schumann, B.; Kautz, M.; Dech, S. Spatial characterization of bark beetle infestations by a multidate synergy of SPOT and Landsat imagery. Environ. Monit. Assess. 2014, 186, 441–456. [Google Scholar] [CrossRef] [PubMed]
- Bright, B.C.; Hudak, A.T.; Kennedy, R.E.; Meddens, A.J.H. Landsat time series and lidar as predictors of live and dead basal area across five bark beetle-affected forests. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 3440–3452. [Google Scholar] [CrossRef]
- Edburg, S.L.; Hicke, J.A.; Brooks, P.D.; Pendall, E.G.; Ewers, B.E.; Norton, U.; Gochis, D.; Gutmann, E.D.; Meddens, A.J.H. Cascading impacts of bark beetle-caused tree mortality on coupled biogeophysical and biogeochemical processes. Front. Ecol. Environ. 2012, 10, 416–424. [Google Scholar] [CrossRef]
- Müller, J.; Bußler, H.; Goßner, M.; Rettelbach, T.; Duelli, P. The European spruce bark beetle Ips typographus in a national park: From pest to keystone species. Biodivers. Conserv. 2008, 17, 2979–3001. [Google Scholar] [CrossRef]
- Aukema, J.E.; Leung, B.; Kovacs, K.; Chivers, C.; Britton, K.O.; Englin, J.; Frankel, S.J.; Haight, R.G.; Holmes, T.P.; Liebhold, A.M.; et al. Economic impacts of Non-Native forest insects in the continental United States. PLoS ONE 2011, 6, e24587. [Google Scholar] [CrossRef]
- Senf, C.; Pflugmacher, D.; Wulder, M.A.; Hostert, P. Characterizing spectral-temporal patterns of defoliator and bark beetle disturbances using Landsat time series. Remote Sens. Environ. 2015, 170, 166–177. [Google Scholar] [CrossRef]
- Hais, M.; Wild, J.; Berec, L.; Brůna, J.; Kennedy, R.; Braaten, J.; Brož, Z. Landsat imagery spectral trajectories-important variables for spatially predicting the risks of bark beetle disturbance. Remote Sens. 2016, 8, 687. [Google Scholar] [CrossRef]
- Latifi, H.; Fassnacht, F.E.; Schumann, B.; Dech, S. Object-based extraction of bark beetle (Ips typographus L.) infestations using multi-date LANDSAT and SPOT satellite imagery. Prog. Phys. Geogr. 2014, 38, 755–785. [Google Scholar] [CrossRef]
- Abdullah, H.; Darvishzadeh, R.; Skidmore, A.K.; Groen, T.A.; Heurich, M. European spruce bark beetle (Ips typographus L.) green attack affects foliar reflectance and biochemical properties. Int. J. Appl. Earth Obs. Geoinf. 2018, 64, 199–209. [Google Scholar] [CrossRef]
- Lausch, A.; Erasmi, S.; King, D.J.; Magdon, P.; Heurich, M. Understanding forest health with remote sensing-Part I-A review of spectral traits, processes and remote-sensing characteristics. Remote Sens. 2016, 8, 1029. [Google Scholar] [CrossRef]
- Lausch, A.; Erasmi, S.; King, D.J.; Magdon, P.; Heurich, M. Understanding forest health with Remote sensing-Part II-A review of approaches and data models. Remote Sens. 2017, 9, 129. [Google Scholar] [CrossRef]
- Meddens, A.J.H.; Hicke, J.A.; Vierling, L.A.; Hudak, A.T. Evaluating methods to detect bark beetle-caused tree mortality using single-date and multi-date Landsat imagery. Remote Sens. Environ. 2013, 132, 49–58. [Google Scholar] [CrossRef]
- Lausch, A.; Heurich, M.; Gordalla, D.; Dobner, H.J.; Gwillym-Margianto, S.; Salbach, C. Forecasting potential bark beetle outbreaks based on spruce forest vitality using hyperspectral remote-sensing techniques at different scales. For. Ecol. Manag. 2013, 308, 76–89. [Google Scholar] [CrossRef]
- Näsi, R.; Honkavaara, E.; Blomqvist, M.; Lyytikäinen-Saarenmaa, P.; Hakala, T.; Viljanen, N.; Kantola, T.; Holopainen, M. Remote sensing of bark beetle damage in urban forests at individual tree level using a novel hyperspectral camera from UAV and aircraft. Urban For. Urban Green. 2018, 30, 72–83. [Google Scholar] [CrossRef]
- Bright, B.C.; Hudak, A.T.; McGaughey, R.; Andersen, H.E.; Negrón, J. Predicting live and dead tree basal area of bark beetle affected forests from discrete-return lidar. Can. J. Remote Sens. 2013, 39, 37–41. [Google Scholar] [CrossRef]
- Stoyanova, M.; Kandilarov, A.; Koutev, V.; Nitcheva, O.; Dobreva, P. Potential of multispectral imaging technology for assessment coniferous forests bitten by a bark beetle in Central Bulgaria. MATEC Web Conf. 2018, 145, 01005. [Google Scholar] [CrossRef] [Green Version]
- Brovkina, O.; Cienciala, E.; Surový, P.; Janata, P. Unmanned aerial vehicles (UAV) for assessment of qualitative classification of Norway spruce in temperate forest stands. Geo-Spat. Inf. Sci. 2018, 21, 12–20. [Google Scholar] [CrossRef] [Green Version]
- Minařík, R.; Langhammer, J. Use of a multispectral UAV photogrammetry for detection and tracking of forest disturbance dynamics. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2016, 41, 711–718. [Google Scholar] [CrossRef]
- Dash, J.P.; Watt, M.S.; Pearse, G.D.; Heaphy, M.; Dungey, H.S. Assessing very high resolution UAV imagery for monitoring forest health during a simulated disease outbreak. ISPRS J. Photogramm. Remote Sens. 2017, 131, 1–14. [Google Scholar] [CrossRef]
- Komárek, J.; Klouček, T.; Prošek, J. The potential of Unmanned Aerial Systems: A tool towards precision classification of hard-to-distinguish vegetation types? Int. J. Appl. Earth Obs. Geoinf. 2018, 71, 9–19. [Google Scholar] [CrossRef]
- Müllerová, J.; Brůna, J.; Bartaloš, T.; Dvořák, P.; Vítková, M.; Pyšek, P. Timing Is Important: Unmanned Aircraft vs. Satellite Imagery in Plant Invasion Monitoring. Front. Plant Sci. 2017, 8, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Moudrý, V.; Gdulová, K.; Fogl, M.; Klápště, P.; Urban, R.; Komárek, J.; Moudrá, L.; Štroner, M.; Barták, V.; Solský, M. Comparison of leaf-off and leaf-on combined UAV imagery and airborne LiDAR for assessment of a post-mining site terrain and vegetation structure: Prospects for monitoring hazards and restoration success. Appl. Geogr. 2019, 104, 32–41. [Google Scholar] [CrossRef]
- Panagiotidis, D.; Abdollahnejad, A.; Surový, P. Determining tree height and crown diameter from high-resolution UAV Determining tree height and crown diameter from high-resolution UAV imagery. Int. J. Remote Sens. 2017, 38, 1–19. [Google Scholar] [CrossRef]
- Surový, P.; Almeida Ribeiro, N.; Panagiotidis, D. Estimation of positions and heights from UAV-sensed imagery in tree plantations in agrosilvopastoral systems. Int. J. Remote Sens. 2018, 39, 4786–4800. [Google Scholar] [CrossRef]
- Senf, C.; Seidl, R.; Hostert, P. Remote sensing of forest insect disturbances: Current state and future directions. Int. J. Appl. Earth Obs. Geoinf. 2017, 60, 49–60. [Google Scholar] [CrossRef] [Green Version]
- Hall, R.J.; Castilla, G.; White, J.C.; Cooke, B.J.; Skakun, R.S. Remote sensing of forest pest damage: A review and lessons learned from a Canadian perspective *. Can. Entomol. 2016, 148, S296–S356. [Google Scholar] [CrossRef]
- Safonova, A.; Tabik, S.; Alcaraz-Segura, D.; Rubtsov, A.; Maglinets, Y.; Herrera, F. Detection of Fir Trees (Abies sibirica) Damaged by the Bark Beetle in Unmanned Aerial Vehicle Images with Deep Learning. Remote Sens. 2019, 11, 643. [Google Scholar] [CrossRef]
- Bannari, A.; Morin, D.; Bonn, F.; Huete, A.R. A review of vegetation indices. Remote Sens. Rev. 1995, 13, 95–120. [Google Scholar] [CrossRef]
- Exelis Visual Information Solutions ENVI Help 2019. Available online: http://www.harrisgeospatial.com/docs/AtmosphericCo (accessed on 20 June 2018).
- Birth, G.S.; McVey, G.R. Measuring the Color of Growing Turf with a Reflectance Spectrophotometer1. Agron. J. 1968, 60, 640. [Google Scholar] [CrossRef]
- le Maire, G.; François, C.; Dufrêne, E. Towards universal broad leaf chlorophyll indices using PROSPECT simulated database and hyperspectral reflectance measurements. Remote Sens. Environ. 2004, 89, 1–28. [Google Scholar] [CrossRef]
- Sripada, R.P.; Heiniger, R.W.; White, J.G.; Meijer, A.D. Aerial color infrared photography for determining early in-season nitrogen requirements in corn. Agron. J. 2006, 98, 968. [Google Scholar] [CrossRef]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef] [Green Version]
- Rouse, J.W., Jr.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring vegetation systems in the Great Plains with ERTS. In Proceedings of the Third ERTS Symposium, Washington DC, USA, 10–14 December 1973; pp. 309–317. [Google Scholar]
- Gitelson, A.A.; Merzlyak, M.N. Remote estimation of chlorophyll content in higher plant leaves. Int. J. Remote Sens. 1997, 18, 2691–2697. [Google Scholar] [CrossRef]
- Noguchi, K.; Gel, Y.R.; Brunner, E.; Frank, K. Nparld: An R software package for the nonparametric analysis of longitudinal data in factorial experiments. J. Stat. Softw. 2012, 50. [Google Scholar] [CrossRef]
- Klouček, T.; Moravec, D.; Komárek, J.; Lagner, O.; Štych, P. Selecting appropriate variables for detecting grassland to cropland changes using high resolution satellite data. PeerJ 2018, 6, e5487. [Google Scholar] [CrossRef]
- Havašová, M.; Bucha, T.; Ferenčík, J.; Jakuš, R. Applicability of a vegetation indices-based method to map bark beetle outbreaks in the High Tatra Mountains. Ann. For. Res. 2015, 58, 295–310. [Google Scholar] [CrossRef]
- Foster, A.C.; Walter, J.A.; Shugart, H.H.; Sibold, J.; Negron, J. Spectral evidence of early-stage spruce beetle infestation in Engelmann spruce. For. Ecol. Manag. 2017, 384, 347–357. [Google Scholar] [CrossRef] [Green Version]
- Richardson, A.D.; Hufkens, K.; Milliman, T.; Aubrecht, D.M.; Chen, M.; Gray, J.M.; Johnston, M.R.; Keenan, T.F.; Klosterman, S.T.; Kosmala, M.; et al. Tracking vegetation phenology across diverse North American biomes using PhenoCam imagery. Sci. Data 2018, 5, 1–24. [Google Scholar] [CrossRef] [PubMed]
- Ma, L.; Li, M.; Ma, X.; Cheng, L.; Du, P.; Liu, Y. A review of supervised object-based land-cover image classification. ISPRS J. Photogramm. Remote Sens. 2017, 130, 277–293. [Google Scholar] [CrossRef]





| Indices | Formula | Reference |
|---|---|---|
| Simple Ratio | [35] | |
| Greenness Index | [36] | |
| Green Ratio Vegetation Index | [37] | |
| Normalized Difference Vegetation Index | [38,39] | |
| Green Normalized Difference Vegetation Index | [40] |
| Period 1 | Period 2 | Period 3 | Period 4 | |
|---|---|---|---|---|
| SR | 2.007/1.911 (0.342) | 1.966/1.706 (0.001) | 1.771/1.420 (<0.001) | 2.326/1.478 (<0.001) |
| GI | 1.112/1.106 (0.245) | 1.115/1.075 (0.001) | 1.097/0.995 (<0.001) | 1.156/0.921 (<0.001) |
| GRVI | 1.793/1.735 (0.581) | 1.762/1.576 (0.002) | 1.636/1.431 (0.001) | 2.020/1.620 (<0.001) |
| NDVI | 0.335/0.313 (0.342) | 0.326/0.261 (0.001) | 0.278/0.173 (<0.001) | 0.399/0.193 (<0.001) |
| GNDVI | 0.284/0.269 (0.581) | 0.276/0.223 (0.002) | 0.241/0.177 (0.001) | 0.338/0.237 (<0.001) |
| Time | 15 June 2017 | 1 August 2017 | 30 August 2017 | 1 October 2017 | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| GI | H | I | ∑ | UA | H | I | ∑ | UA | H | I | ∑ | UA | H | I | ∑ | UA | |
| H | 30 | 1 | 31 | 0.97 | 33 | 1 | 34 | 0.97 | 38 | 2 | 40 | 0.95 | 39 | 1 | 40 | 0.98 | |
| I | 10 | 9 | 19 | 0.47 | 7 | 9 | 16 | 0.56 | 2 | 8 | 10 | 0.80 | 1 | 9 | 10 | 0.90 | |
| ∑ | 40 | 10 | 50 | 40 | 10 | 50 | 40 | 10 | 50 | 40 | 10 | 50 | |||||
| PA | 0.75 | 0.90 | 0.78 | 0.83 | 0.90 | 0.84 | 0.95 | 0.80 | 0.92 | 0.98 | 0.90 | 0.96 | |||||
| NDVI | H | I | ∑ | UA | H | I | ∑ | UA | H | I | ∑ | UA | H | I | ∑ | UA | |
| H | 28 | 3 | 31 | 0.90 | 32 | 1 | 33 | 0.97 | 36 | 3 | 39 | 0.92 | 39 | 2 | 41 | 0.95 | |
| I | 12 | 7 | 19 | 0.37 | 8 | 9 | 17 | 0.53 | 4 | 7 | 11 | 0.64 | 1 | 8 | 9 | 0.89 | |
| ∑ | 40 | 10 | 50 | 40 | 10 | 50 | 40 | 10 | 50 | 40 | 10 | 50 | |||||
| PA | 0.70 | 0.70 | 0.70 | 0.80 | 0.90 | 0.82 | 0.90 | 0.70 | 0.86 | 0.98 | 0.80 | 0.94 | |||||
| SR | H | I | ∑ | UA | H | I | ∑ | UA | H | I | ∑ | UA | H | I | ∑ | UA | |
| H | 24 | 2 | 26 | 0.92 | 30 | 1 | 33 | 0.97 | 35 | 3 | 38 | 0.92 | 38 | 2 | 40 | 0.95 | |
| I | 16 | 8 | 24 | 0.33 | 10 | 9 | 17 | 0.47 | 5 | 7 | 12 | 0.58 | 2 | 8 | 10 | 0.80 | |
| ∑ | 40 | 10 | 50 | 40 | 10 | 50 | 40 | 10 | 50 | 40 | 10 | 50 | |||||
| PA | 0.60 | 0.80 | 0.64 | 0.75 | 0.90 | 0.78 | 0.88 | 0.70 | 0.84 | 0.95 | 0.80 | 0.92 | |||||
| GNDVI | H | I | ∑ | UA | H | I | ∑ | UA | H | I | ∑ | UA | H | I | ∑ | UA | |
| H | 23 | 3 | 26 | 0.89 | 30 | 1 | 31 | 0.97 | 35 | 4 | 39 | 0.90 | 38 | 2 | 40 | 0.95 | |
| I | 17 | 7 | 24 | 0.29 | 10 | 9 | 19 | 0.47 | 5 | 6 | 11 | 0.55 | 2 | 8 | 10 | 0.80 | |
| ∑ | 40 | 10 | 50 | 40 | 10 | 50 | 40 | 10 | 50 | 40 | 10 | 50 | |||||
| PA | 0.58 | 0.70 | 0.60 | 0.75 | 0.90 | 0.78 | 0.88 | 0.60 | 0.82 | 0.95 | 0.80 | 0.92 | |||||
| GRVI | H | I | ∑ | UA | H | I | ∑ | UA | H | I | ∑ | UA | H | I | ∑ | UA | |
| H | 22 | 2 | 24 | 0.92 | 29 | 1 | 30 | 0.97 | 35 | 3 | 38 | 0.92 | 35 | 2 | 37 | 0.95 | |
| I | 18 | 8 | 26 | 0.31 | 11 | 9 | 20 | 0.45 | 5 | 7 | 12 | 0.58 | 5 | 8 | 13 | 0.62 | |
| ∑ | 40 | 10 | 50 | 40 | 10 | 50 | 40 | 10 | 50 | 40 | 10 | 50 | |||||
| PA | 0.55 | 0.80 | 0.60 | 0.73 | 0.90 | 0.76 | 0.88 | 0.70 | 0.84 | 0.88 | 0.80 | 0.86 | |||||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Klouček, T.; Komárek, J.; Surový, P.; Hrach, K.; Janata, P.; Vašíček, B. The Use of UAV Mounted Sensors for Precise Detection of Bark Beetle Infestation. Remote Sens. 2019, 11, 1561. https://doi.org/10.3390/rs11131561
Klouček T, Komárek J, Surový P, Hrach K, Janata P, Vašíček B. The Use of UAV Mounted Sensors for Precise Detection of Bark Beetle Infestation. Remote Sensing. 2019; 11(13):1561. https://doi.org/10.3390/rs11131561
Chicago/Turabian StyleKlouček, Tomáš, Jan Komárek, Peter Surový, Karel Hrach, Přemysl Janata, and Bedřich Vašíček. 2019. "The Use of UAV Mounted Sensors for Precise Detection of Bark Beetle Infestation" Remote Sensing 11, no. 13: 1561. https://doi.org/10.3390/rs11131561