

Bifurcation Analysis of a Photovoltaic Power Source Interfacing a Current-Mode-Controlled Boost Converter with Limited Current Sensor Bandwidth for Maximum Power Point Tracking

 , , and
, , and
Abstract
:1. Introduction
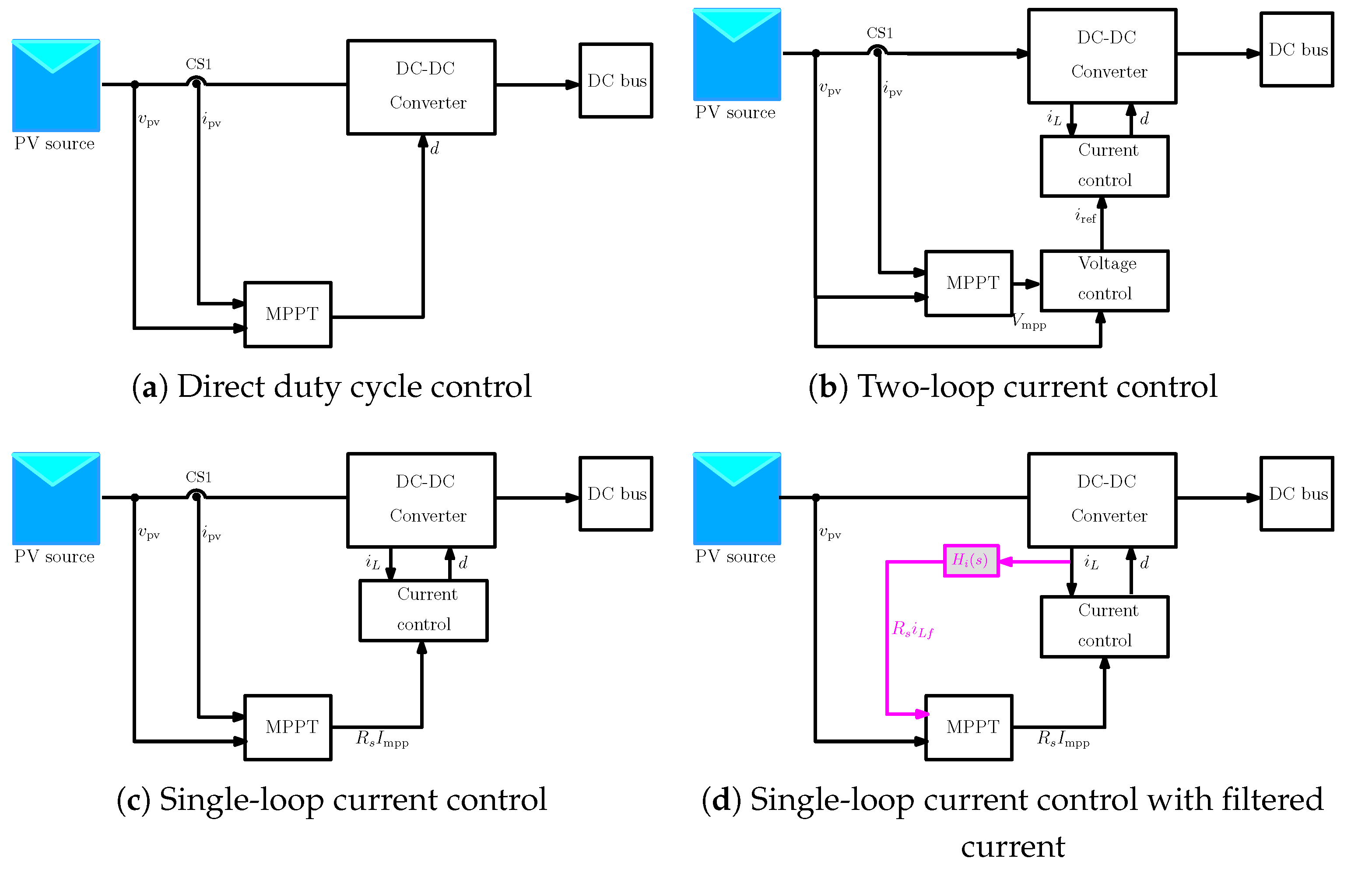
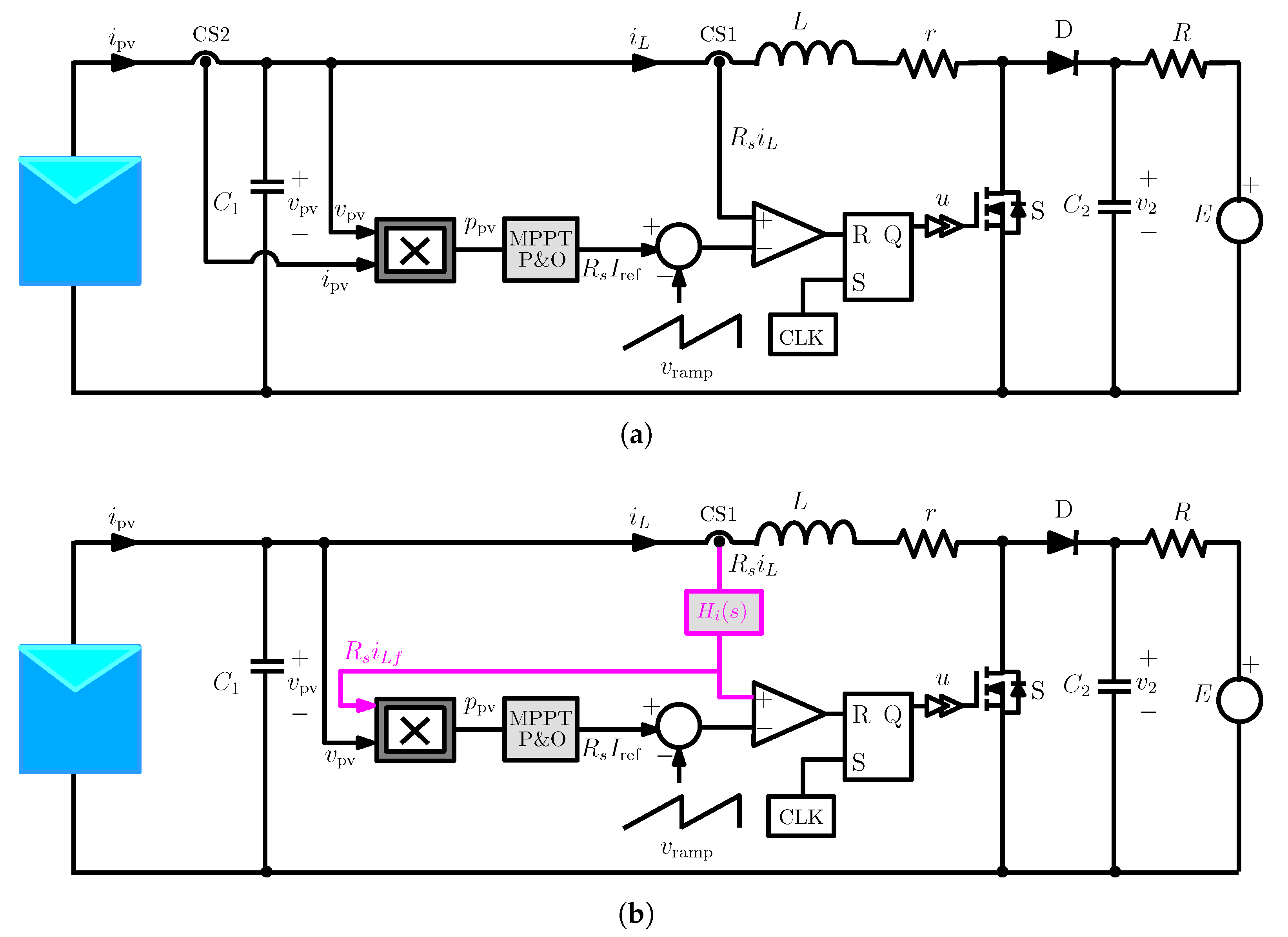
- Propose a flexible control based on the inductor current filtered by a low-pass filter integrating a relevant MPPT P&O algorithm to estimate the average value of the PV source power;
- Propose suitable orbital stability tools such as Floquet theory to study the stability of the overall system under consideration as a function of the cut-off frequency of the low-pass filter and the amplitude of the ramp signal;
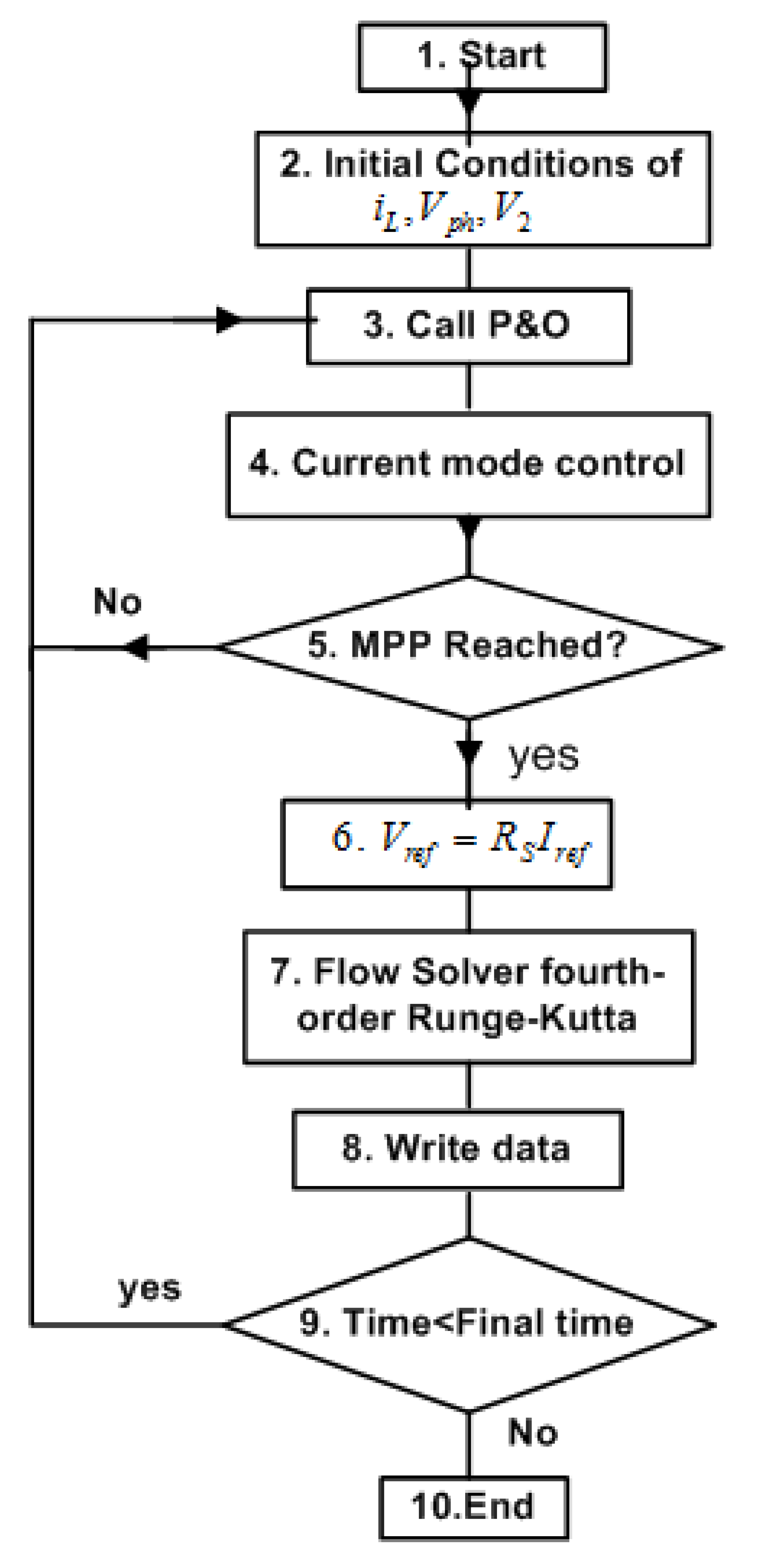
- Develop a bifurcation analysis of the DC-DC power system with MATLAB/SIMULINK based on the fourth-order Runge–Kutta numerical method for a deep study of the stability;
- Develop a bifurcation analysis of the DC-DC power system with the PSIM software that is close to experimental interpretation of the DC-DC system dynamic.
2. Materials and Methods
2.1. System Evaluation
2.2. Mathematical Modeling
2.3. Steady-State Analysis
2.4. Floquet Theory
2.4.1. The Piecewise Linear State-Space Switched Model Close to the Maximum Power Point
2.4.2. Stability Analysis Using Floquet Theory
3. Results and Discussions
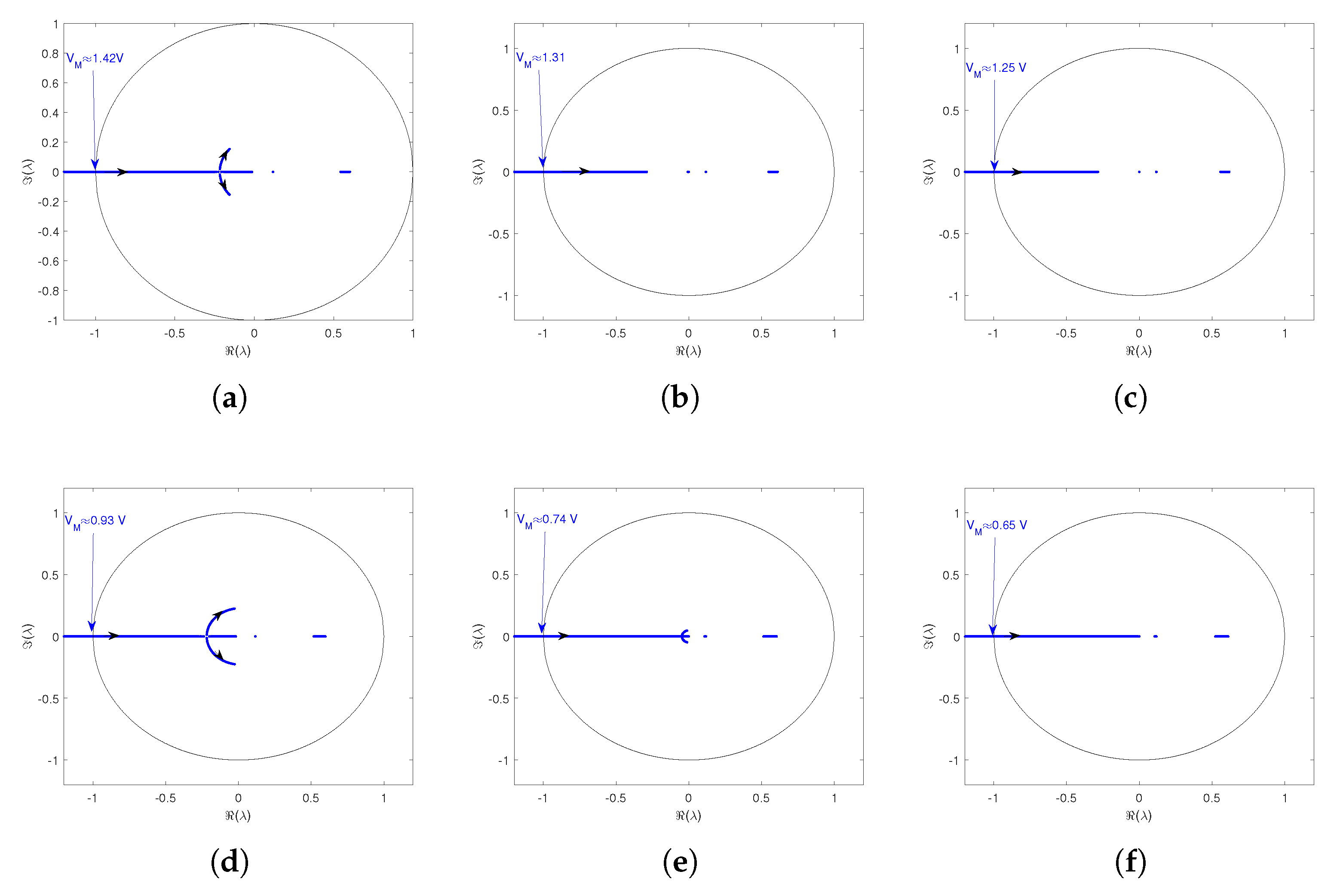
3.1. Floquet Theory on the Stability
3.1.1. Simulations Results in MATLAB/SIMULINK Software
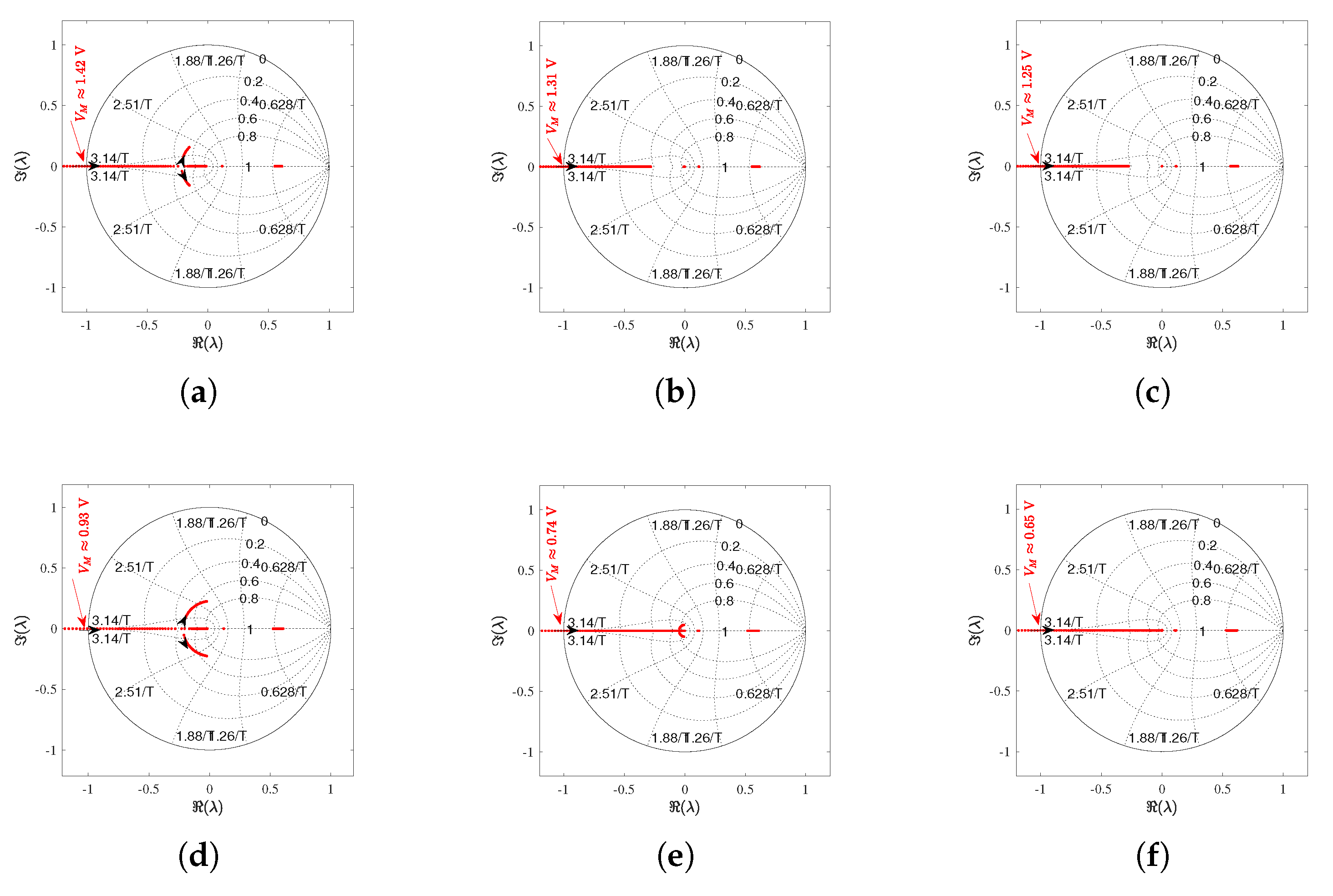
3.1.2. Simulations Results in PSIM Software
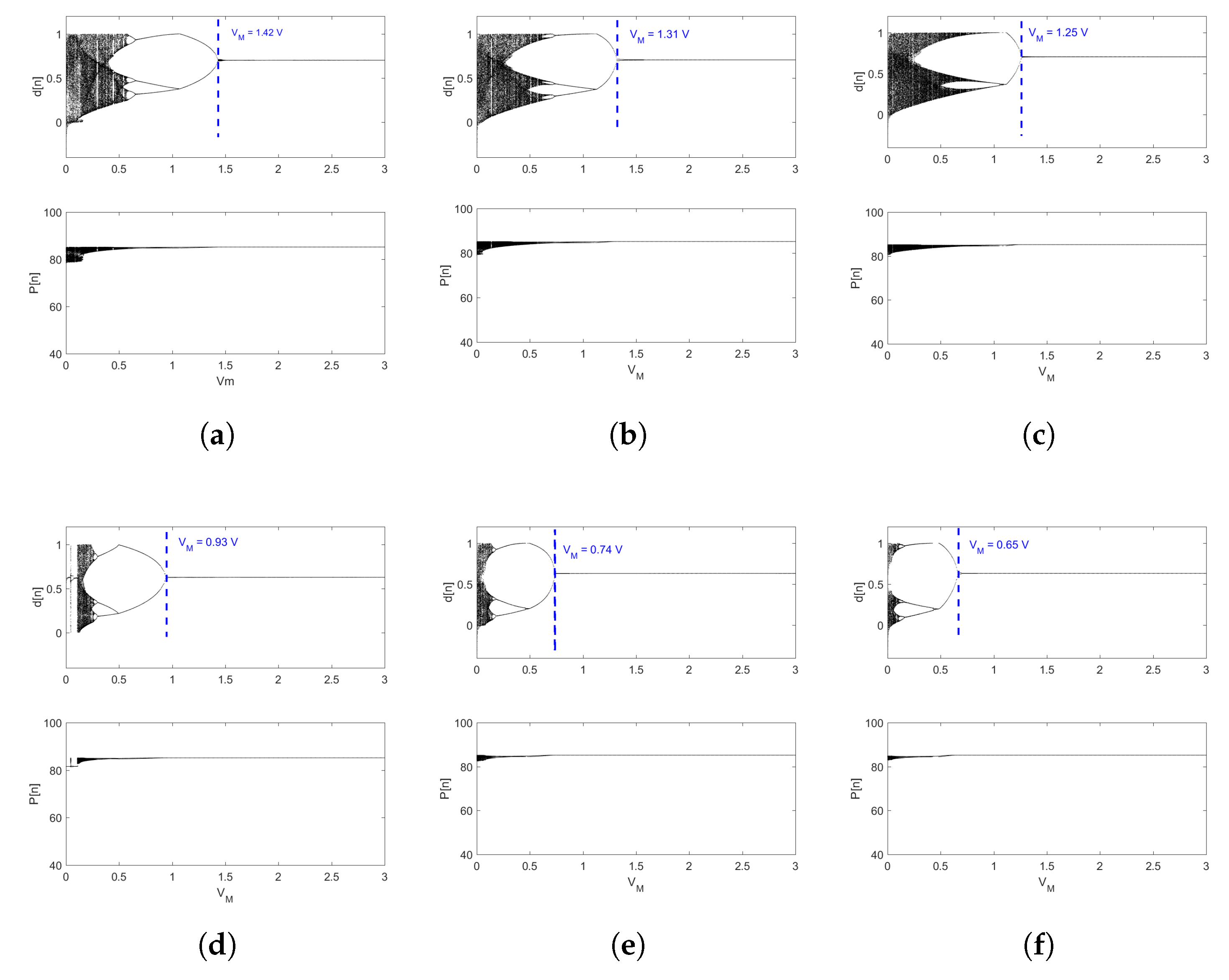
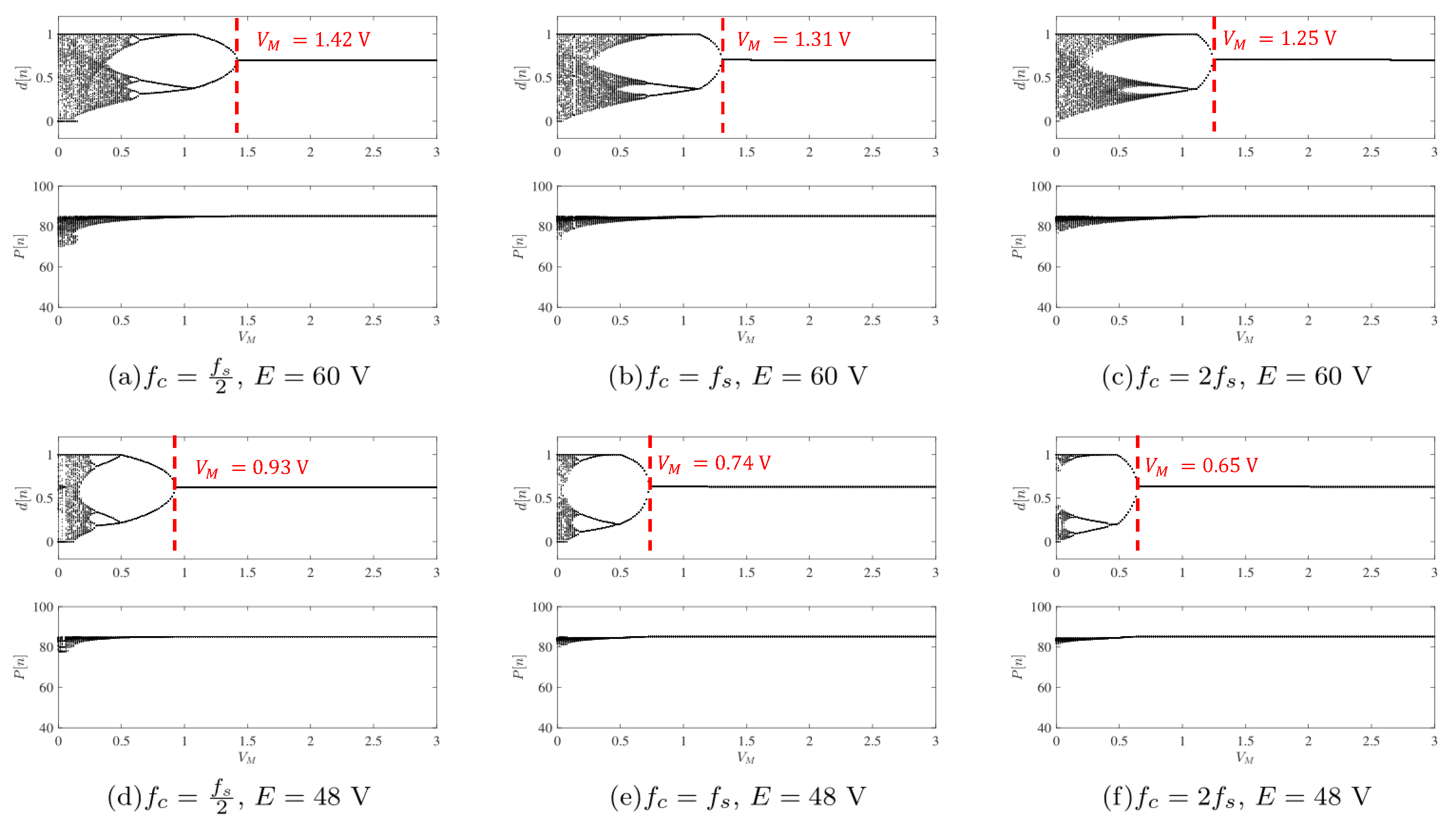
3.2. Bifurcation Behavior from the Nonlinear Circuit-Level Switched Model with the Linear Model of the PV Generator from MATLAB/SIMULINK Software
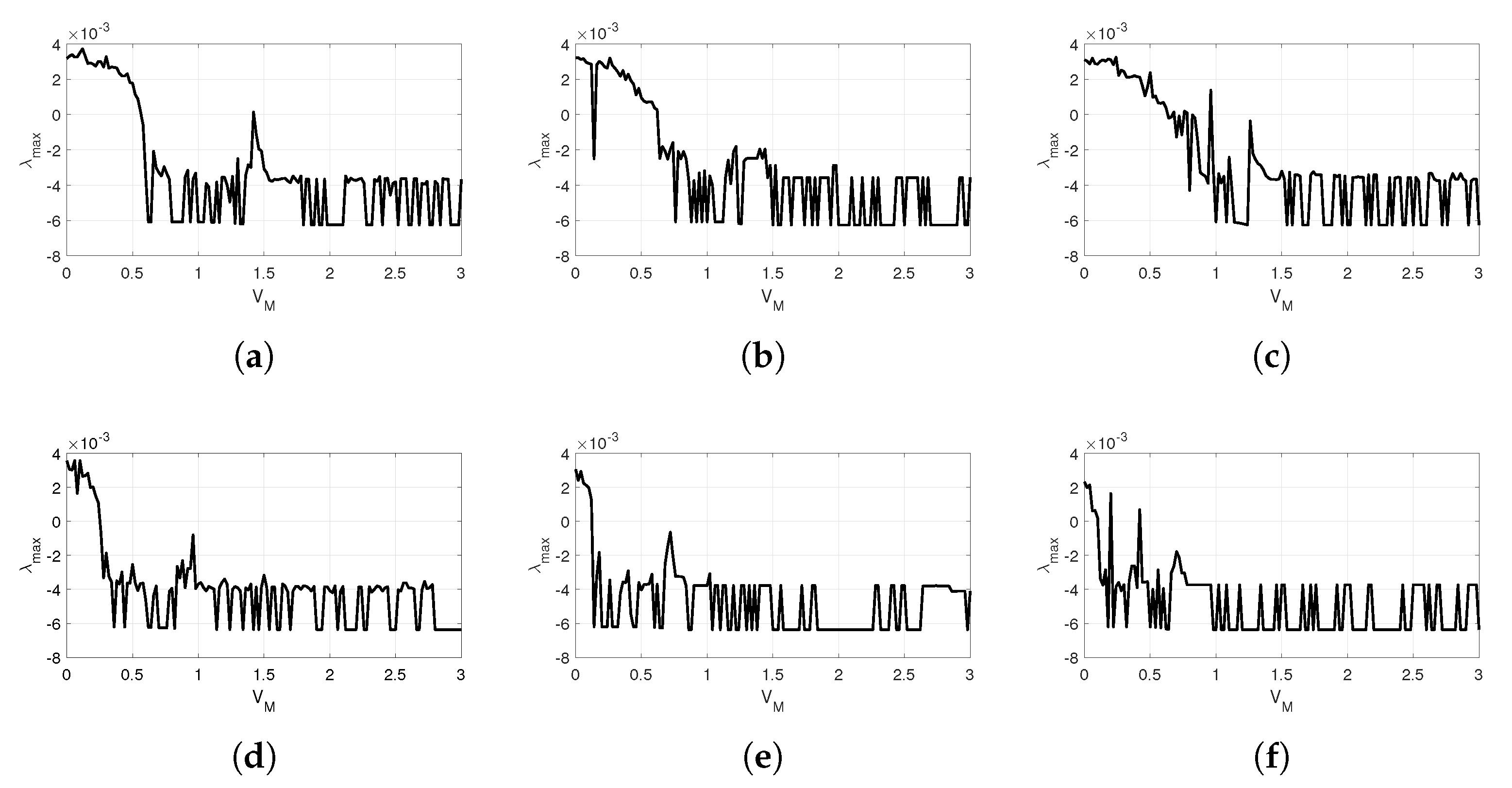
3.3. Bifurcation Behavior from the Nonlinear Circuit-Level Switched Model with the Nonlinear Model of the PV Generator from PSIM Software
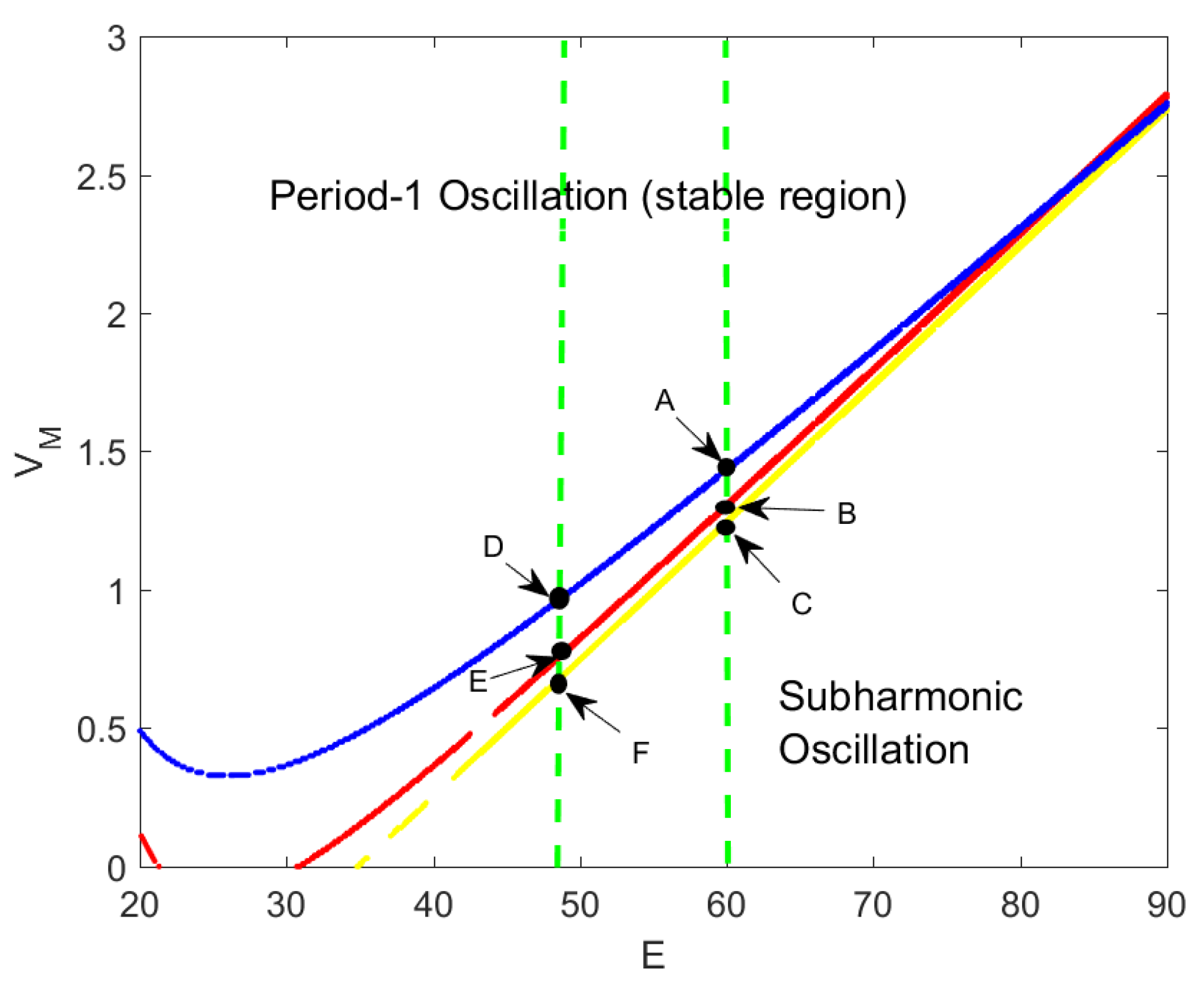
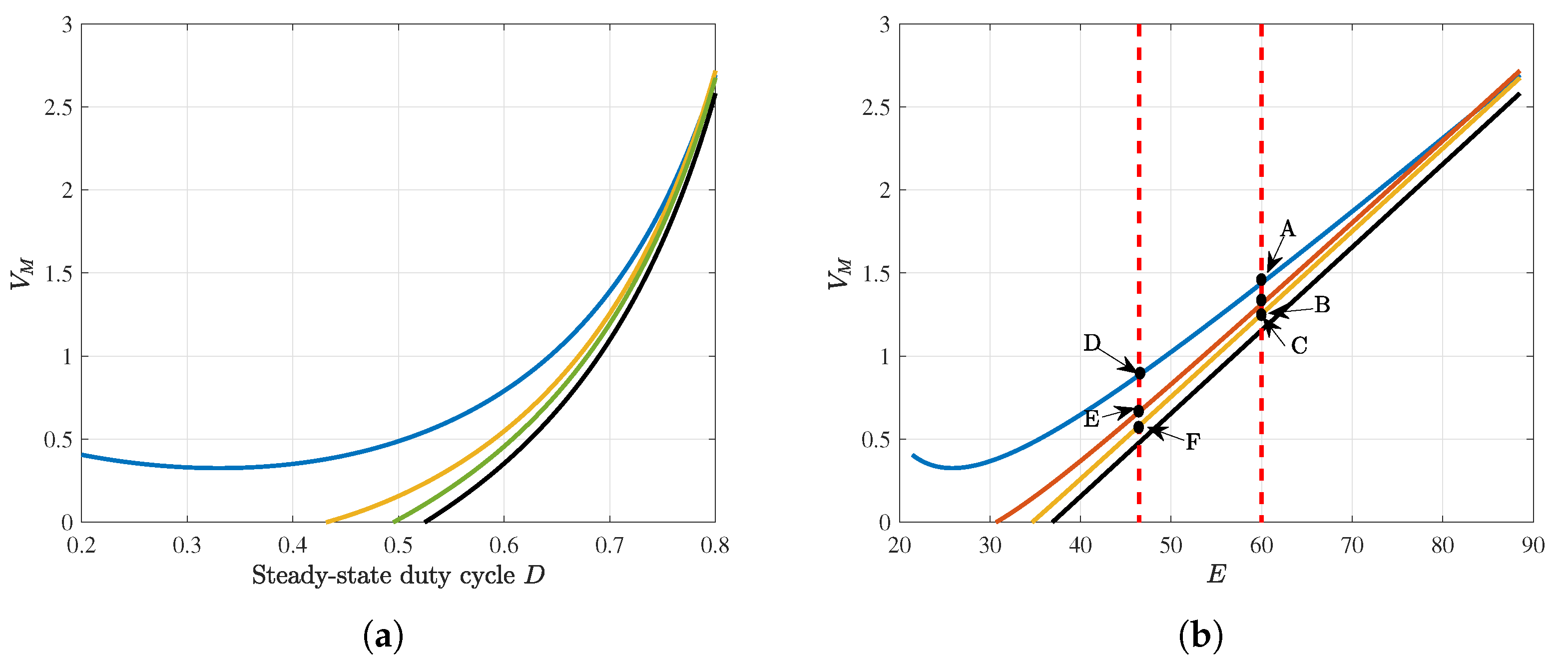
3.4. Stability Boundaries in the Parameter Space
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Srinivasarao, P.; Peddakapu, K.; Mohamed, M.; Deepika, K.K.; Sudhakar, K. Simulation and experimental design of adaptive-based maximum power point tracking methods for photovoltaic systems. Comput. Electr. Eng. 2021, 89, 106910. [Google Scholar] [CrossRef]
- Kishore, D.K.; Mohamed, M.; Sudhakar, K.; Peddakapu, K. Swarm intelligence-based MPPT design for PV systems under diverse partial shading conditions. Energy 2023, 265, 126366. [Google Scholar] [CrossRef]
- Kishore, D.K.; Mohamed, M.; Sudhakar, K.; Peddakapu, K. An improved grey wolf optimization based MPPT algorithm for photovoltaic systems under diverse partial shading conditions. Proc. J. Phys. Conf. Ser. 2022, 2312, 012063. [Google Scholar] [CrossRef]
- Syafiq, A.; Pandey, A.; Adzman, N.; Abd Rahim, N. Advances in approaches and methods for self-cleaning of solar photovoltaic panels. Sol. Energy 2018, 162, 597–619. [Google Scholar] [CrossRef]
- Bourourou, F.; Tadjer, S.A.; Habi, I. Wind Power Conversion Chain Harmonic Compensation using APF Based on FLC. Alger. J. Renew. Energy Sustain. Dev. 2020, 2, 75–83. [Google Scholar] [CrossRef]
- Rana, K.; Kumar, V.; Sehgal, N.; George, S.; Azar, A.T. Efficient maximum power point tracking in fuel cell using the fractional-order PID controller. In Renewable Energy Systems; Azar, A.T., Kamal, N.A., Eds.; Advances in Nonlinear Dynamics and Chaos (ANDC); Academic Press: Cambridge, MA, USA, 2021; pp. 111–132. [Google Scholar]
- Fekik, A.; Azar, A.T.; Kamal, N.A.; Serrano, F.E.; Hamida, M.L.; Denoun, H.; Yassa, N. Maximum Power Extraction from a Photovoltaic Panel Connected to a Multi-cell Converter. In Proceedings of the International Conference on Advanced Intelligent Systems and Informatics, Cairo, Egypt, 19–21 October 2020; Hassanien, A.E., Slowik, A., Snášel, V., El-Deeb, H., Tolba, F.M., Eds.; Springer International Publishing: Cham, Switzerland, 2021; pp. 873–882. [Google Scholar]
- Ammar, H.H.; Azar, A.T.; Shalaby, R.; Mahmoud, M.I. Metaheuristic Optimization of Fractional Order Incremental Conductance (FO-INC) Maximum Power Point Tracking (MPPT). Complexity 2019, 2019, 1–13. [Google Scholar] [CrossRef]
- Amara, K.; Malek, A.; Bakir, T.; Fekik, A.; Azar, A.T.; Almustafa, K.M.; Bourennane, E.B.; Hocine, D. Adaptive neuro-fuzzy inference system based maximum power point tracking for stand-alone photovoltaic system. Int. J. Model. Identif. Control 2019, 33, 311–321. [Google Scholar] [CrossRef]
- Ben Smida, M.; Sakly, A.; Vaidyanathan, S.; Azar, A.T. Control-Based Maximum Power Point Tracking for a Grid-Connected Hybrid Renewable Energy System Optimized by Particle Swarm Optimization. In Advances in System Dynamics and Control; Azar, A.T., Vaidyanathan, S., Eds.; Advances in Systems Analysis, Software Engineering, and High Performance Computing (ASASEHPC); IGI Global: Hershey, PA, USA, 2018; pp. 58–89. [Google Scholar]
- El Aroudi, A. A new approach for accurate prediction of subharmonic oscillation in switching regulators—Part I: Mathematical derivations. IEEE Trans. Power Electron. 2016, 32, 5651–5665. [Google Scholar] [CrossRef]
- Femia, N.; Petrone, G.; Spagnuolo, G.; Vitelli, M. A technique for improving P&O MPPT performances of double-stage grid-connected photovoltaic systems. IEEE Trans. Ind. Electron. 2009, 56, 4473–4482. [Google Scholar]
- Pu, Q.; Zhu, X.; Liu, J.; Cai, D.; Fu, G.; Wei, D.; Sun, J.; Zhang, R. Integrated optimal design of speed profile and fuzzy PID controller for train with multifactor consideration. IEEE Access 2020, 8, 152146–152160. [Google Scholar] [CrossRef]
- Hosseini, S.; Taheri, S.; Pouresmaeil, E.; Espinoza-Trejo, D.R. Enhancement of A Photovoltaic Inverter Efficiency Using A Shade-Tolerant MPPT. In Proceedings of the IECON 2021—47th Annual Conference of the IEEE Industrial Electronics Society, IEEE, Toronto, ON, Canada, 13–16 October 2021; pp. 1–5. [Google Scholar]
- Garcerá, G.; Figueres, E.; Mocholí, A. Novel three-controller average current mode control of DC-DC PWM converters with improved robustness and dynamic response. IEEE Trans. Power Electron. 2000, 15, 516–528. [Google Scholar] [CrossRef]
- Estcourt, C.; Stirrup, O.; Mapp, F.; Copas, A.; Howarth, A.; Owusus, M.W.; Low, N.; Saunders, J.; Mercer, C.; Flowers, P.; et al. O18. 3 Characteristics and outcomes of people who used Accelerated Partner Therapy for chlamydia in the LUSTRUM cluster cross-over randomised control trial. Sex. Transm. Infect. 2021, 97, A58. [Google Scholar]
- Bianconi, E.; Calvente, J.; Giral, R.; Mamarelis, E.; Petrone, G.; Ramos-Paja, C.A.; Spagnuolo, G.; Vitelli, M. A fast current-based MPPT technique employing sliding mode control. IEEE Trans. Ind. Electron. 2012, 60, 1168–1178. [Google Scholar] [CrossRef]
- Hosseini, S.; Taheri, S.; Farzaneh, M.; Taheri, H. A high-performance shade-tolerant MPPT based on current-mode control. IEEE Trans. Power Electron. 2019, 34, 10327–10340. [Google Scholar] [CrossRef]
- Weidong, J.; Wang, L.; Wang, J.; Zhang, X.; Wang, P. A carrier-based virtual space vector modulation with active neutral-point voltage control for a neutral-point-clamped three-level inverter. IEEE Trans. Ind. Electron. 2018, 65, 8687–8696. [Google Scholar] [CrossRef]
- Garcia-Teruel, A.; Forehand, D. A review of geometry optimisation of wave energy converters. Renew. Sustain. Energy Rev. 2021, 139, 110593. [Google Scholar] [CrossRef]
- Guo-Hua, Z.; Bo-Cheng, B.; Jian-Ping, X.; Yan-Yan, J. Dynamical analysis and experimental verification of valley current controlled buck converter. Chin. Phys. B 2010, 19, 050509. [Google Scholar] [CrossRef]
- El Aroudi, A.; Al-Numay, M.; Garcia, G.; Al Hossani, K.; Al Sayari, N.; Cid-Pastor, A. Analysis of nonlinear dynamics of a quadratic boost converter used for maximum power point tracking in a grid-interlinked PV system. Energies 2018, 12, 61. [Google Scholar] [CrossRef] [Green Version]
- Erickson, R.W.; Maksimović, D. Principles of steady-state converter analysis. In Fundamentals of Power Electronics; Springer: Berlin/Heidelberg, Germany, 2020; pp. 15–41. [Google Scholar]
- El Aroudi, A.; Zhioua, M.; Al-Numay, M.; Garraoui, R.; Al-Hosani, K. Stability Analysis of a Boost Converter with an MPPT Controller for Photovoltaic Applications. In Proceedings of the Mediterranean Conference on Information & Communication Technologies, Saidia, Morocco, 7–9 May 2015; Springer: Berlin/Heidelberg, Germany, 2016; pp. 483–491. [Google Scholar]
- Dongmo Wamba, M.; Montagner, J.P.; Romanowicz, B. Imaging deep-mantle plumbing beneath La Réunion and Comores hot spots: Vertical plume conduits and horizontal ponding zones. Sci. Adv. 2023, 9, eade3723. [Google Scholar] [CrossRef]
- Wamba, M.; Montagner, J.P.; Romanowicz, B.; Barruol, G. Multi-Mode Waveform Tomography of the Indian Ocean Upper and Mid-Mantle Around the Réunion Hotspot. J. Geophys. Res. Solid Earth 2021, 126, e2020JB021490. [Google Scholar] [CrossRef]
- Kagho, L.; Dongmo, M.; Pelap, F. Dynamics of an Earthquake under Magma Thrust Strength. J. Earthq. 2015, 2015, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Pelap, F.; Fomethe, A.; Dongmo, M.; Kagho, L.; Tanekou, G.; Makenne, Y. Direction effects of the pulling force on the first order phase transition in a one block model for earthquakes. J. Geophys. Eng. 2014, 11, 045007. [Google Scholar] [CrossRef]
- Dongmo, M.; Kagho, L.; Pelap, F.; Tanekou, G.; Makenne, Y.; Fomethe, A. Water effects on the first-order transition in a model of earthquakes. Int. Sch. Res. Not. 2014, 2014. [Google Scholar] [CrossRef] [Green Version]
- Giaouris, D.; Elbkosh, A.; Banerjee, S.; Zahawi, B.; Pickert, V. Stability of switching circuits using complete-cycle solution matrices. In Proceedings of the 2006 IEEE International Conference on Industrial Technology, Mumbai, India, 16–18 August 2006; pp. 1954–1959. [Google Scholar]
- Giaouris, D.; Banerjee, S.; Zahawi, B.; Pickert, V. Stability analysis of the continuous-conduction-mode buck converter via Filippov’s method. IEEE Trans. Circuits Syst. I Regul. Pap. 2008, 55, 1084–1096. [Google Scholar] [CrossRef] [Green Version]
- Giaouris, D.; Banerjee, S.; Zahawi, B.; Pickert, V. Control of fast scale bifurcations in power-factor correction converters. IEEE Trans. Circuits Syst. II Express Briefs 2007, 54, 805–809. [Google Scholar] [CrossRef] [Green Version]
- Tucker, W. Computing accurate Poincaré maps. Phys. D Nonlinear Phenom. 2002, 171, 127–137. [Google Scholar] [CrossRef]
- Giaouris, D.; Banerjee, S.; Stergiopoulos, F.; Papadopoulou, S.; Voutetakis, S.; Zahawi, B.; Pickert, V.; Abusorrah, A.; Al Hindawi, M.; Al-Turki, Y. Foldings and grazings of tori in current controlled interleaved boost converters. Int. J. Circuit Theory Appl. 2014, 42, 1080–1091. [Google Scholar] [CrossRef]
- Sahan, B.; Vergara, A.N.; Henze, N.; Engler, A.; Zacharias, P. A single-stage PV module integrated converter based on a low-power current-source inverter. IEEE Trans. Ind. Electron. 2008, 55, 2602–2609. [Google Scholar] [CrossRef]
- Deane, J.H.; Hamill, D.C. Instability, subharmonics and chaos in power electronic systems. In Proceedings of the 20th Annual IEEE Power Electronics Specialists Conference, Milwaukee, WI, USA, 26–29 June 1989; pp. 34–42. [Google Scholar]
- Wolf, A.; Swift, J.B.; Swinney, H.L.; Vastano, J.A. Determining Lyapunov exponents from a time series. Phys. D Nonlinear Phenom. 1985, 16, 285–317. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Deng, Z.; Li, W. A precise Runge–Kutta integration and its application for solving nonlinear dynamical systems. Appl. Math. Comput. 2007, 184, 496–502. [Google Scholar] [CrossRef]
- Banerjee, S.; Ranjan, P.; Grebogi, C. Bifurcations in two-dimensional piecewise smooth maps-theory and applications in switching circuits. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 2000, 47, 633–643. [Google Scholar] [CrossRef] [Green Version]
- Robert, B.; Robert, C. Border collision bifurcations in a one-dimensional piecewise smooth map for a PWM current-programmed H-bridge inverter. Int. J. Control 2002, 75, 1356–1367. [Google Scholar] [CrossRef]
- Wolf, D.M.; Varghese, M.; Sanders, S.R. Bifurcation of power electronic circuits. J. Frankl. Inst. 1994, 331, 957–999. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| 10 F | |
| L | 200 H |
| r | 100 m |
| E | 48 V and 60 V |
| 200 m | |
| 1 | |
| 47 F | |
| updated according to (9) | |
| 50 kHz | |
| variable | |
| Variable |
| Parameters | Values |
|---|---|
| Maximum power | 85.17 W |
| Voltage at maximum power | 18.28 V |
| Current at maximum power | 4.66 A |
| Maximum power | 85.17 W |
| Short-circuit current | 5 A |
| Open-circuit voltage | V |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kengne, E.R.M.; Kammogne, A.S.T.; Siewe, M.S.; Tamo, T.T.; Azar, A.T.; Mahlous, A.R.; Tounsi, M.; Khan, Z.I. Bifurcation Analysis of a Photovoltaic Power Source Interfacing a Current-Mode-Controlled Boost Converter with Limited Current Sensor Bandwidth for Maximum Power Point Tracking. Sustainability 2023, 15, 6097. https://doi.org/10.3390/su15076097
Kengne ERM, Kammogne AST, Siewe MS, Tamo TT, Azar AT, Mahlous AR, Tounsi M, Khan ZI. Bifurcation Analysis of a Photovoltaic Power Source Interfacing a Current-Mode-Controlled Boost Converter with Limited Current Sensor Bandwidth for Maximum Power Point Tracking. Sustainability. 2023; 15(7):6097. https://doi.org/10.3390/su15076097
Chicago/Turabian StyleKengne, Edwige Raissa Mache, Alain Soup Tewa Kammogne, Martin Siewe Siewe, Thomas Tatietse Tamo, Ahmad Taher Azar, Ahmed Redha Mahlous, Mohamed Tounsi, and Zafar Iqbal Khan. 2023. "Bifurcation Analysis of a Photovoltaic Power Source Interfacing a Current-Mode-Controlled Boost Converter with Limited Current Sensor Bandwidth for Maximum Power Point Tracking" Sustainability 15, no. 7: 6097. https://doi.org/10.3390/su15076097