
Optimal Control of Industrial Pollution under Stochastic Differential Models
Abstract
:1. Introduction
1.1. Research Questions
- How can industrial enterprises construct effective pollution control strategies and efficiently use pollution treatment devices to control the total amount of pollutants?
- How can industrial enterprises minimize the total expected discounted environmental costs (including environmental damage costs and pollution control costs) in pollution control?
1.2. Novelty of the Current Study
- In addition to output, we take some stochastic factors into consideration when modeling the pollution treatment, which brings the model closer to reality.
- A new optimal control strategy is proposed to control the single industrial pollution of enterprises, which determines the starting time and intensity of pollution control in order to prevent the total amount of pollutants from being overloaded and to minimize the total cost of the enterprise.
1.3. Literature Review
2. The Model
- (1)
- the environmental damage cost:
- (2)
- The pollution treatment cost:
- (i)
- ,
- (ii)
- ,
- (iii)
- ,
- (iv)
- (v)
- .
3. Formulation of Mathematical Model
- A continuation region:
- A pollution control region:
- (i)
- (ii)
- .
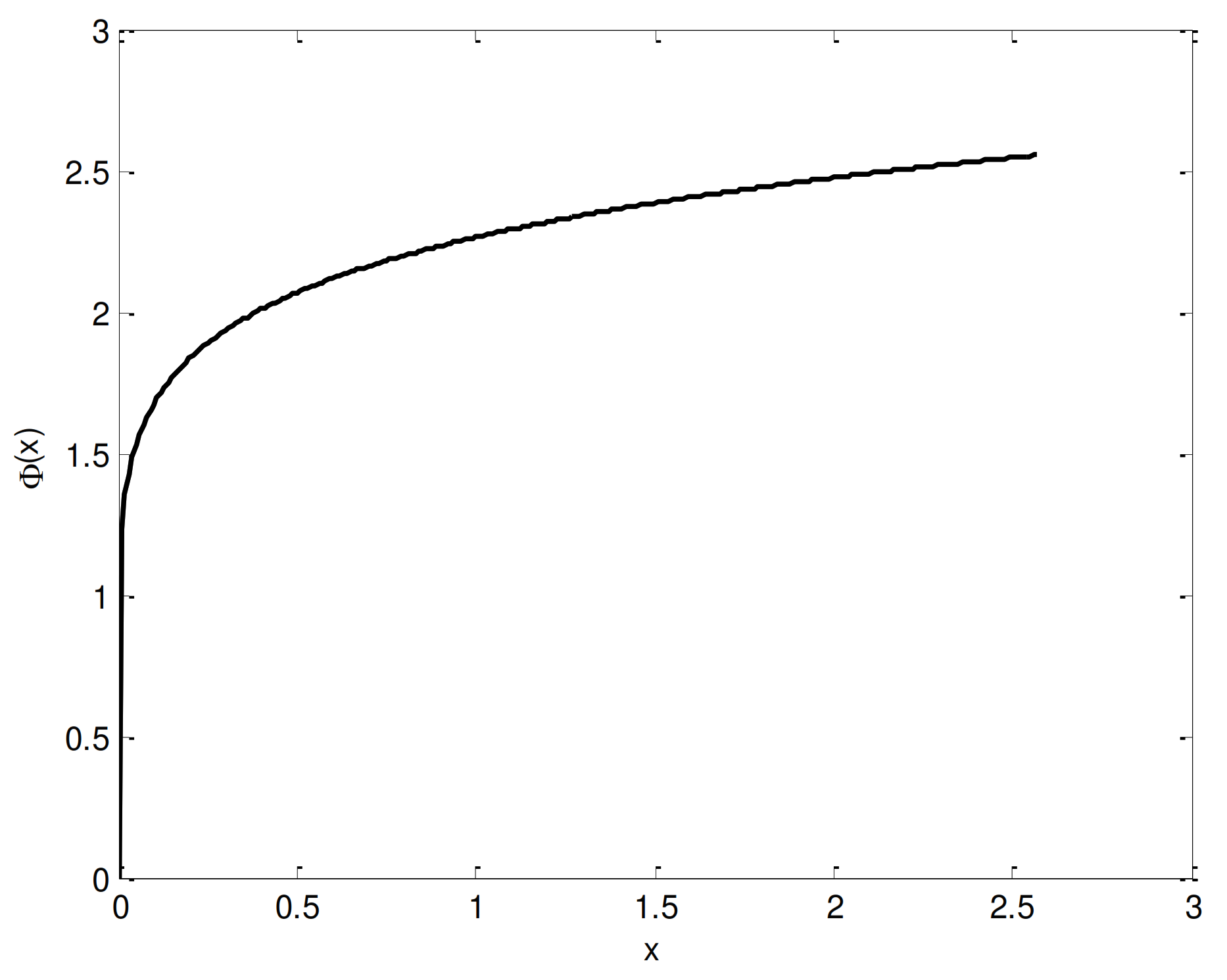
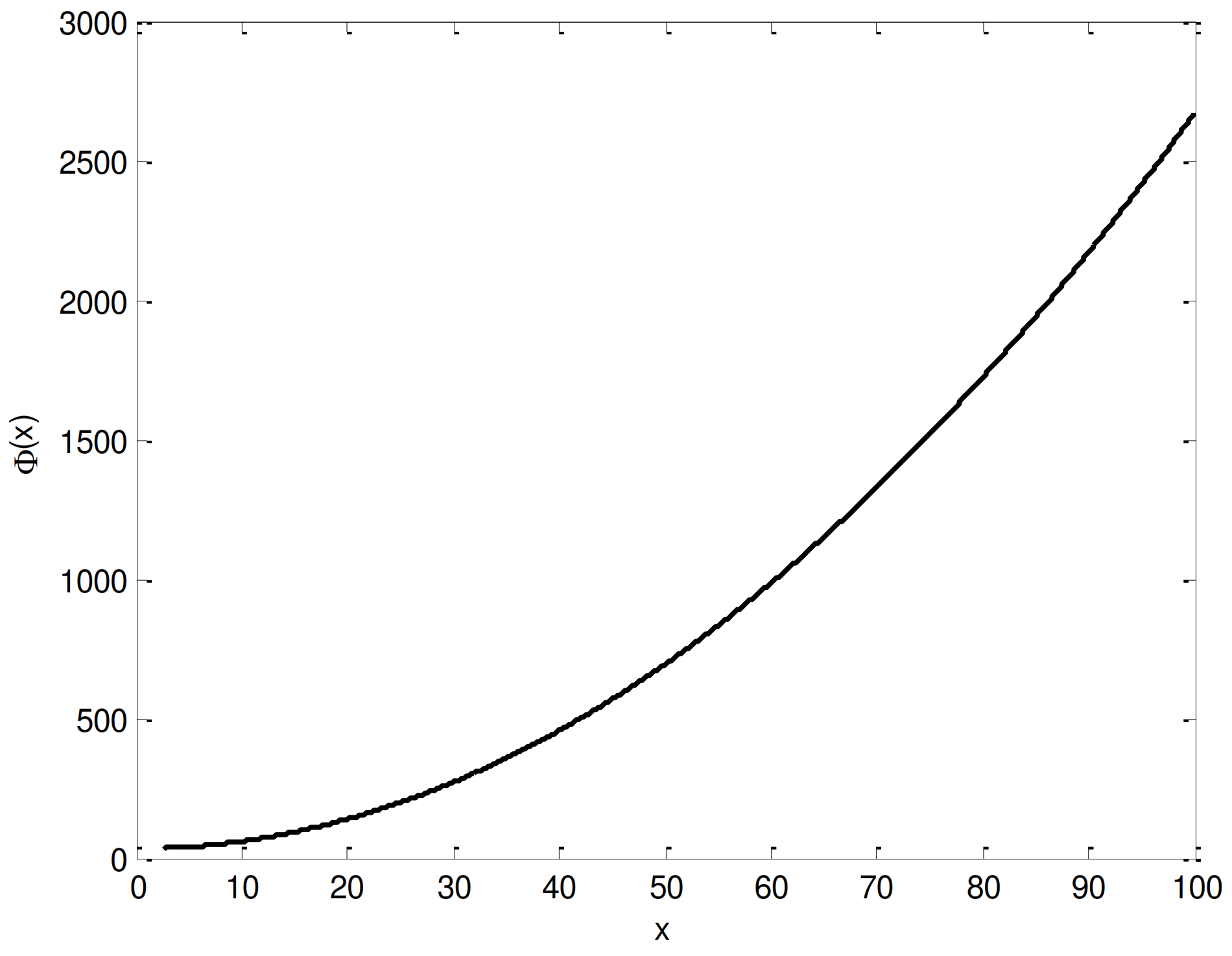
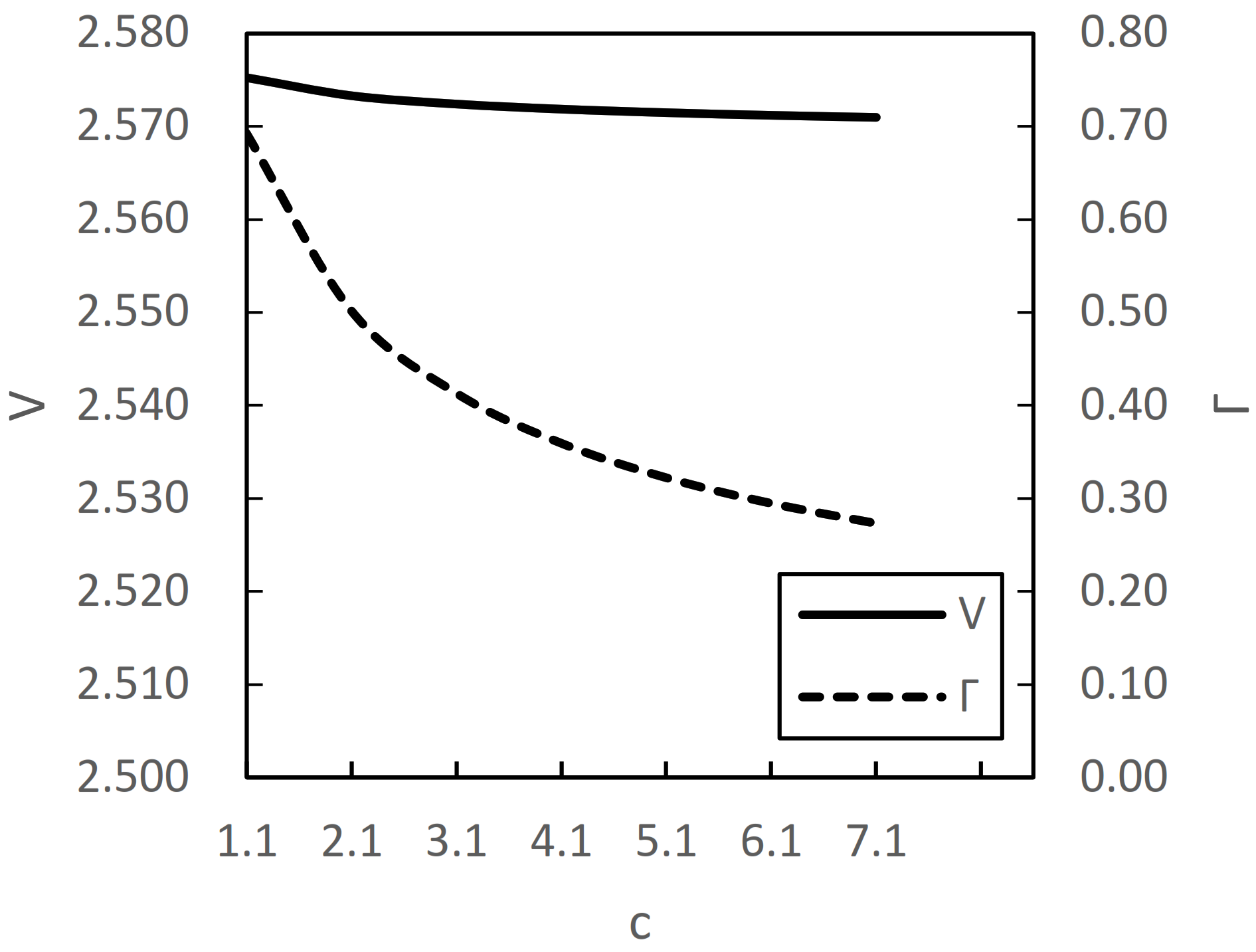
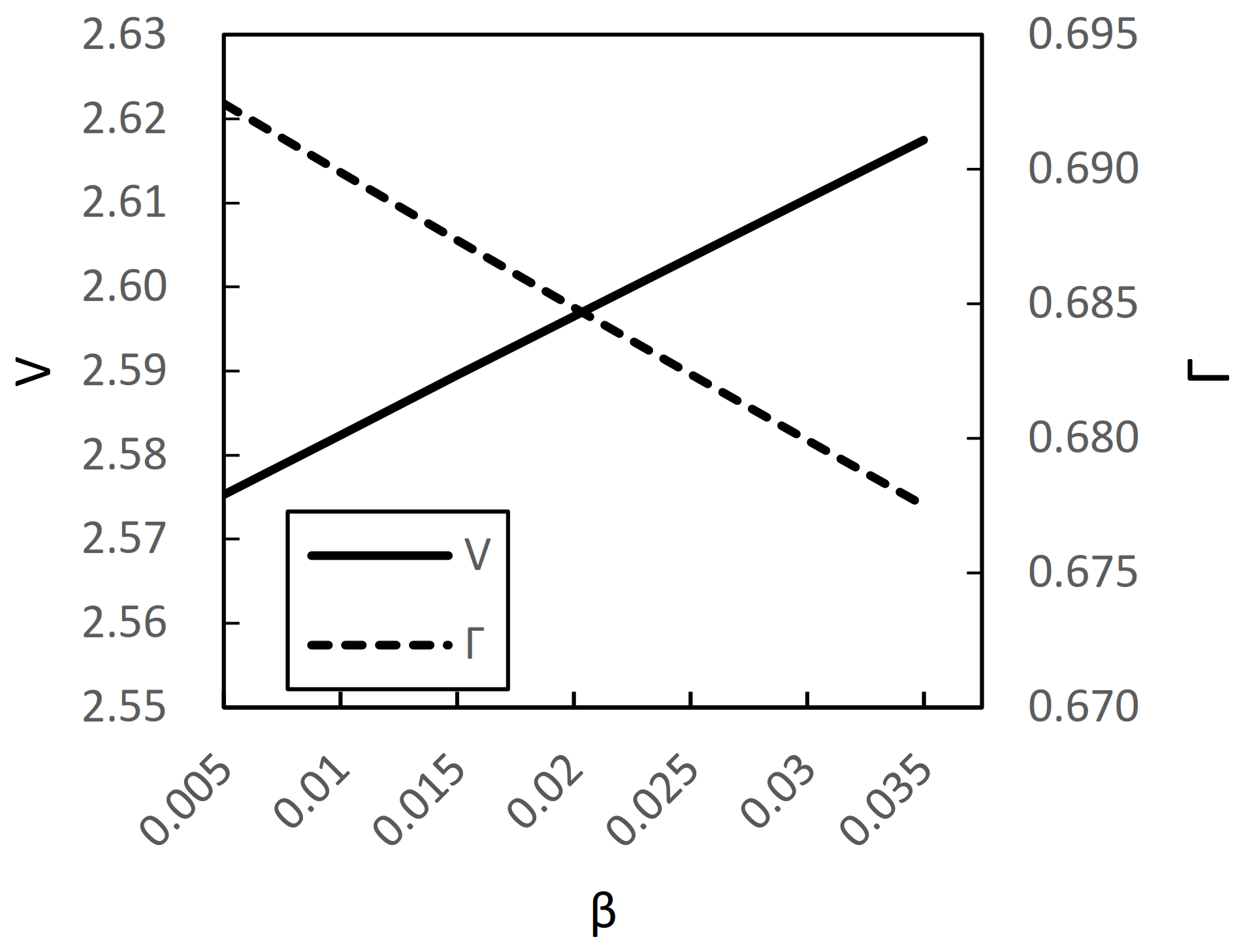
4. Numerical Computations and Sensitive Analysis
- V = 2.5753, = 0.6925.
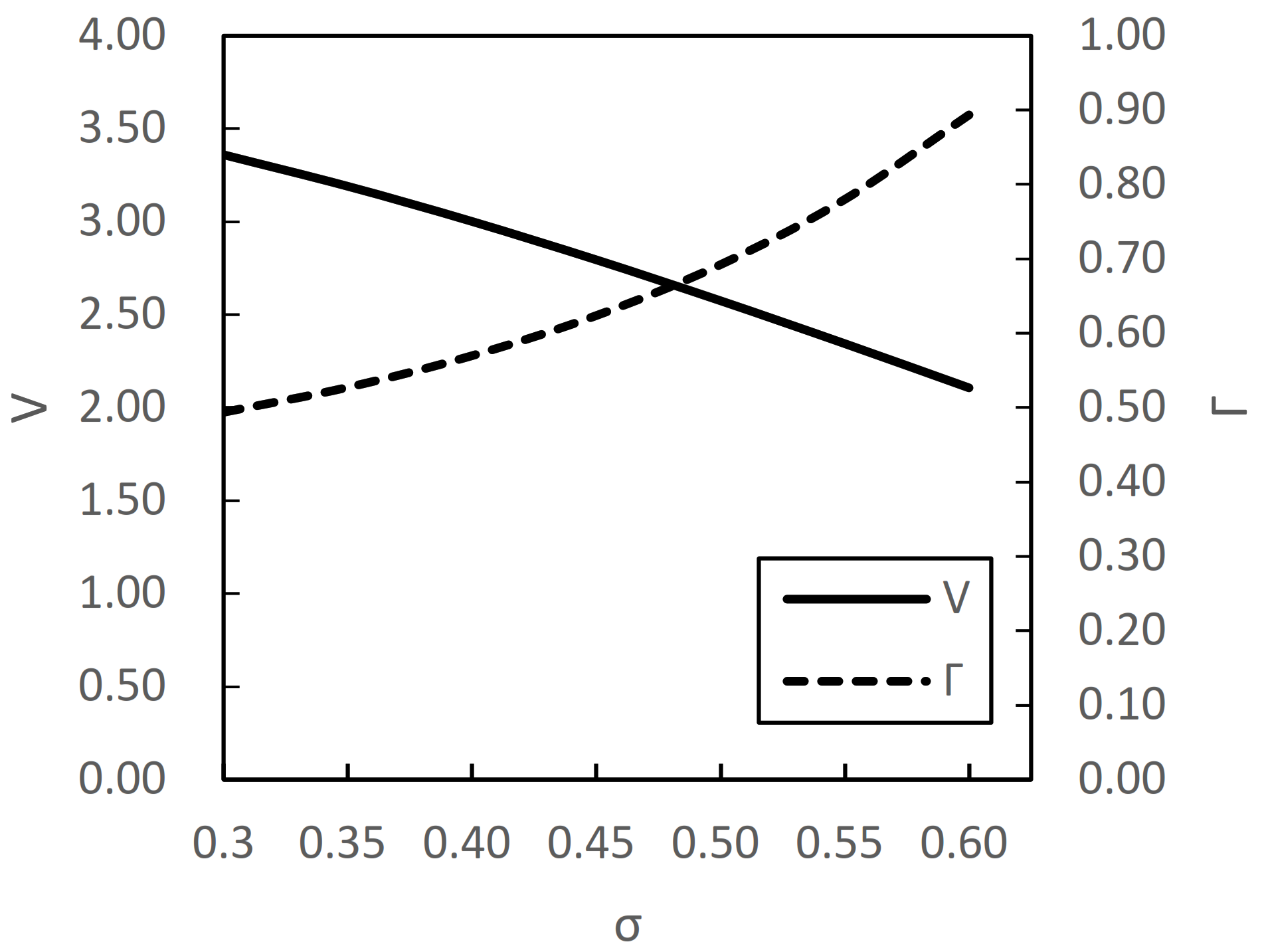
4.1. The Impact of Change on the Volatility
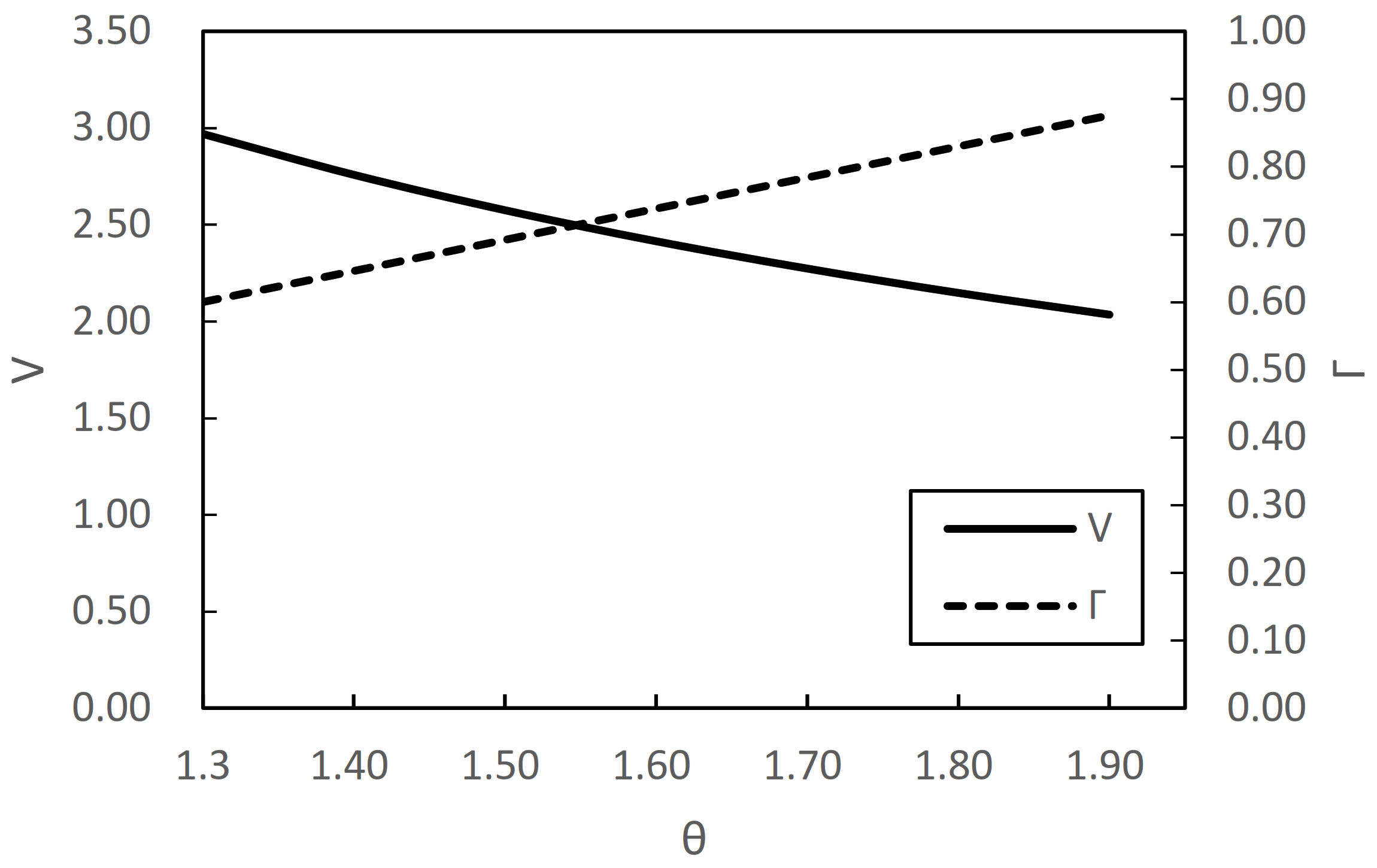
4.2. The Impact of Change in Cost Parameters
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Derivation of
Appendix B. Proof of Proposition 2
References
- Copeland, B.R.; Taylor, M.S. Trade and Transboundary Pollution 1. In The Economics of International Trade and the Environment; CRC Press: Boca Raton, FL, USA, 2001; pp. 119–142. [Google Scholar]
- Bertinelli, L.; Camacho, C.; Zou, B. Carbon capture and storage and transboundary pollution: A differential game approach. Eur. J. Oper. Res. 2014, 237, 721–728. [Google Scholar] [CrossRef]
- Sedakov, A.; Qiao, H.; Wang, S. A model of river pollution as a dynamic game with network externalities. Eur. J. Oper. Res. 2021, 290, 1136–1153. [Google Scholar] [CrossRef]
- Yu, Q.-W.; Wu, F.-P.; Zhang, Z.-F.; Wan, Z.-C.; Shen, J.-Y.; Zhang, L.-N. Technical inefficiency, abatement cost and substitutability of industrial water pollutants in Jiangsu Province, China. J. Clean. Prod. 2021, 280, 124260. [Google Scholar] [CrossRef]
- Ali, I.; Khan, S.U. Threshold of stochastic SIRS epidemic model from infectious to susceptible class with saturated incidence rate using spectral method. Symmetry 2022, 14, 1838. [Google Scholar] [CrossRef]
- Ali, I.; Khan, S.U. Asymptotic Behavior of Three Connected Stochastic Delay Neoclassical Growth Systems Using Spectral Technique. Mathematics 2022, 10, 3639. [Google Scholar] [CrossRef]
- Robison, H.D. Who pays for industrial pollution abatement? Rev. Econ. Stat. 1985, 67, 702–706. [Google Scholar] [CrossRef]
- Freeman, H.; Harten, T.; Springer, J.; Randall, P.; Curran, M.A.; Stone, K. Industrial pollution prevention! A critical review. J. Air Waste Manag. Assoc. 1992, 42, 618–656. [Google Scholar] [CrossRef]
- Shen, T.T.; Shen, T.T. Industrial Pollution Prevention; Springer: Berlin/Heidelberg, Germany, 1995. [Google Scholar]
- Sell, N.J. Industrial Pollution Control: Issues and Techniques; John Wiley & Sons: Hoboken, NJ, USA, 1992. [Google Scholar]
- Arami, M.; Limaee, N.Y.; Mahmoodi, N.M.; Tabrizi, N.S. Removal of dyes from colored textile wastewater by orange peel adsorbent: Equilibrium and kinetic studies. J. Colloid Interface Sci. 2005, 288, 371–376. [Google Scholar] [CrossRef]
- Zahrim, A.Y.; Gilbert, M.L.; Janaun, J. Treatment of Pulp and Paper Mill Effluent Using Photo-fentons Process. J. Appl. Sci. 2007, 7, 2164–2167. [Google Scholar] [CrossRef] [Green Version]
- Orhon, D.; Babuna, F.G.; Karahan, O. Industrial Wastewater Treatment by Activated Sludge; IWA Publishing: London, UK, 2009. [Google Scholar]
- Rajeshwari, K.; Balakrishnan, M.; Kansal, A.; Lata, K.; Kishore, V. State-of-the-art of anaerobic digestion technology for industrial wastewater treatment. Renew. Sustain. Energy Rev. 2000, 4, 135–156. [Google Scholar] [CrossRef]
- Muga, H.E.; Mihelcic, J.R. Sustainability of wastewater treatment technologies. J. Environ. Manag. 2008, 88, 437–447. [Google Scholar] [CrossRef]
- Patwardhan, A.D. Industrial Wastewater Treatment; PHI Learning Pvt. Ltd.: New Delhi, India, 2017. [Google Scholar]
- Rosu, B.; Condrachi, L.; Rosu, A.; Arseni, M.; Murariu, G. Optimizing the Performance of a Simulated Wastewater Treatment Plant by the Relaxation Method. EIRP Proc. 2021, 16. [Google Scholar]
- Eskeland, G.S.; Jimenez, E. Policy instruments for pollution control in developing countries. World Bank Res. Obs. 1992, 7, 145–169. [Google Scholar] [CrossRef] [Green Version]
- Afsah, S.; Laplante, B.; Wheeler, D. Controlling Industrial Pollution: A New Paradigm; SSRN: Rochester, NY, USA, 1996. [Google Scholar]
- Pargal, S.; Wheeler, D. Informal regulation of industrial pollution in developing countries: Evidence from Indonesia. J. Political Econ. 1996, 104, 1314–1327. [Google Scholar] [CrossRef]
- García, J.H.; Sterner, T.; Afsah, S. Public disclosure of industrial pollution: The PROPER approach for Indonesia? Environ. Dev. Econ. 2007, 12, 739–756. [Google Scholar] [CrossRef] [Green Version]
- Dong, L.; Fujita, T.; Dai, M.; Geng, Y.; Ren, J.; Fujii, M.; Wang, Y.; Ohnishi, S. Towards preventative eco-industrial development: An industrial and urban symbiosis case in one typical industrial city in China. J. Clean. Prod. 2016, 114, 387–400. [Google Scholar] [CrossRef]
- Corcoran, E.; Nellemann, C.; Baker, E.; Bos, R.; Osborn, D.; Savelli, H. The central role of wastewater management in sustainable development. A Rapid Response Assessment. United Nations Environment Programme, UN-HABITAT, GRID-Arendal. J. Environ. Prot. 2010, 3, 12–29. [Google Scholar]
- Sonune, A.; Ghate, R. Developments in wastewater treatment methods. Desalination 2004, 167, 55–63. [Google Scholar] [CrossRef]
- Crini, G.; Lichtfouse, E. Advantages and disadvantages of techniques used for wastewater treatment. Environ. Chem. Lett. 2019, 17, 145–155. [Google Scholar] [CrossRef]
- Varjani, S.; Joshi, R.; Srivastava, V.K.; Ngo, H.H.; Guo, W. Treatment of wastewater from petroleum industry: Current practices and perspectives. Environ. Sci. Pollut. Res. 2020, 27, 27172–27180. [Google Scholar] [CrossRef]
- Akella, R.; Kumar, P. Optimal control of production rate in a failure prone manufacturing system. IEEE Trans. Autom. Control 1986, 31, 116–126. [Google Scholar] [CrossRef] [Green Version]
- Korn, R. Optimal impulse control when control actions have random consequences. Math. Oper. Res. 1997, 22, 639–667. [Google Scholar] [CrossRef]
- Ohnishi, M.; Tsujimura, M. An impulse control of a geometric Brownian motion with quadratic costs. Eur. J. Oper. Res. 2006, 168, 311–321. [Google Scholar] [CrossRef]
- Cadenillas, A.; Choulli, T.; Taksar, M.; Zhang, L. Classical and impulse stochastic control for the optimization of the dividend and risk policies of an insurance firm. Math. Financ. Int. J. Math. Stat. Financ. Econ. 2006, 16, 181–202. [Google Scholar] [CrossRef]
- Cadenillas, A.; Zapatero, F. Classical and impulse stochastic control of the exchange rate using interest rates and reserves. Math. Financ. 2000, 10, 141–156. [Google Scholar] [CrossRef]
- Bensoussan, A.; Liu, R.H.; Sethi, S.P. Optimality of an (s,S) policy with compound Poisson and diffusion demands: A quasi-variational inequalities approach. SIAM J. Control Optim. 2005, 44, 1650–1676. [Google Scholar] [CrossRef]
- Cadenillas, A.; Lakner, P.; Pinedo, M. Optimal control of a mean-reverting inventory. Oper. Res. 2010, 58, 1697–1710. [Google Scholar] [CrossRef] [Green Version]
- Bensoussan, A.; Long, H.; Perera, S.; Sethi, S. Impulse control with random reaction periods: A central bank intervention problem. Oper. Res. Lett. 2012, 40, 425–430. [Google Scholar] [CrossRef]
- Perera, S.; Long, H. An approximation scheme for impulse control with random reaction periods. Oper. Res. Lett. 2017, 45, 585–591. [Google Scholar] [CrossRef]
- Ouaret, S.; Kenné, J.P.; Gharbi, A. Production and replacement policies for a deteriorating manufacturing system under random demand and quality. Eur. J. Oper. Res. 2018, 264, 623–636. [Google Scholar] [CrossRef]
- Perera, S.; Gupta, V.; Buckley, W. Management of online server congestion using optimal demand throttling. Eur. J. Oper. Res. 2020, 285, 324–342. [Google Scholar] [CrossRef]
- Atasu, A.; Van Wassenhove, L.N.; Sarvary, M. Efficient take-back legislation. Prod. Oper. Manag. 2009, 18, 243–258. [Google Scholar] [CrossRef]
- Atasu, A.; Subramanian, R. Extended producer responsibility for e-waste: Individual or collective producer responsibility? Prod. Oper. Manag. 2012, 21, 1042–1059. [Google Scholar] [CrossRef]
- Chang, S.; Qin, W.; Wang, X. Dynamic optimal strategies in transboundary pollution game under learning by doing. Phys. A Stat. Mech. Its Appl. 2018, 490, 139–147. [Google Scholar] [CrossRef]
- Kohler, W.E.; Johnson, L.W. Elementary Differential Equations; Pearson Addison-Wesley: Boston, MA, USA, 2006. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| Pollution generated by the enterprise at time t when there is no pollution treatment | |
| Pollution generated by the enterprise at time t during the treatment period | |
| Intensity of pollution treatment | |
| The start time of the i-th pollution treatment period | |
| The duration of the i-th pollution treatment period | |
| s | Pollution treatment policy |
| The growth rate of the pollution when there is no treatment | |
| The volatility of the total pollution | |
| The growth rate of pollution during the pollution treatment period | |
| V | A positive threshold |
| Parameters | μ | θ | σ | β | r | c | K | λ |
|---|---|---|---|---|---|---|---|---|
| Baseline | 1.50 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, L.; Ding, H.; Zhong, Y.; Wang, C. Optimal Control of Industrial Pollution under Stochastic Differential Models. Sustainability 2023, 15, 5609. https://doi.org/10.3390/su15065609
Xiao L, Ding H, Zhong Y, Wang C. Optimal Control of Industrial Pollution under Stochastic Differential Models. Sustainability. 2023; 15(6):5609. https://doi.org/10.3390/su15065609
Chicago/Turabian StyleXiao, Lu, Huacong Ding, Yu Zhong, and Chaojie Wang. 2023. "Optimal Control of Industrial Pollution under Stochastic Differential Models" Sustainability 15, no. 6: 5609. https://doi.org/10.3390/su15065609