
Use of One-Stage Detector and Feature Detector in Infrared Video on Transport Infrastructure and Tunnels

Abstract
:1. Introduction
2. Related Work
2.1. Application of Machine Learning in Vehicle Detection
2.2. Detecting Thermal Fields on an Objects
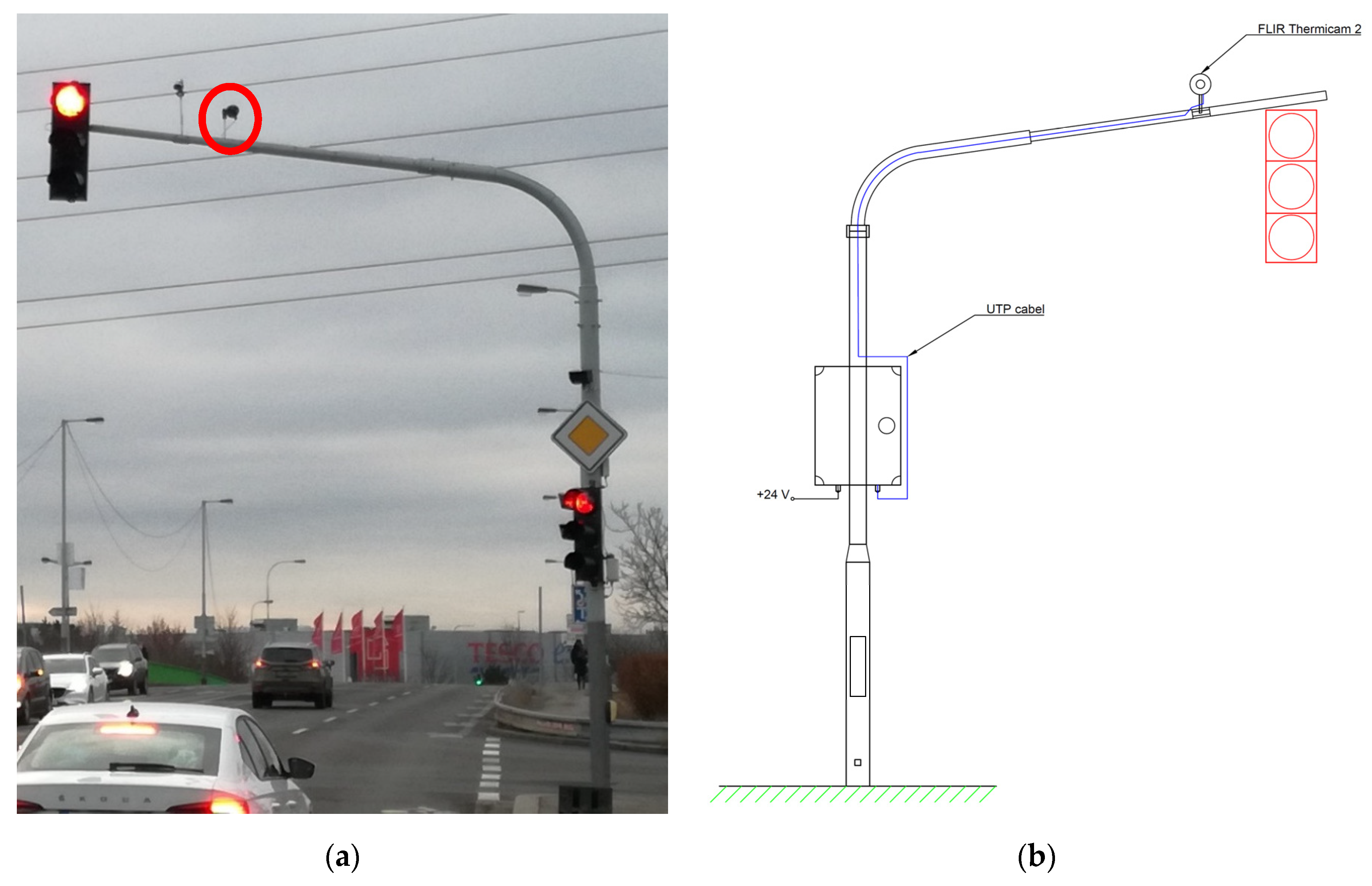
3. Materials and Methods
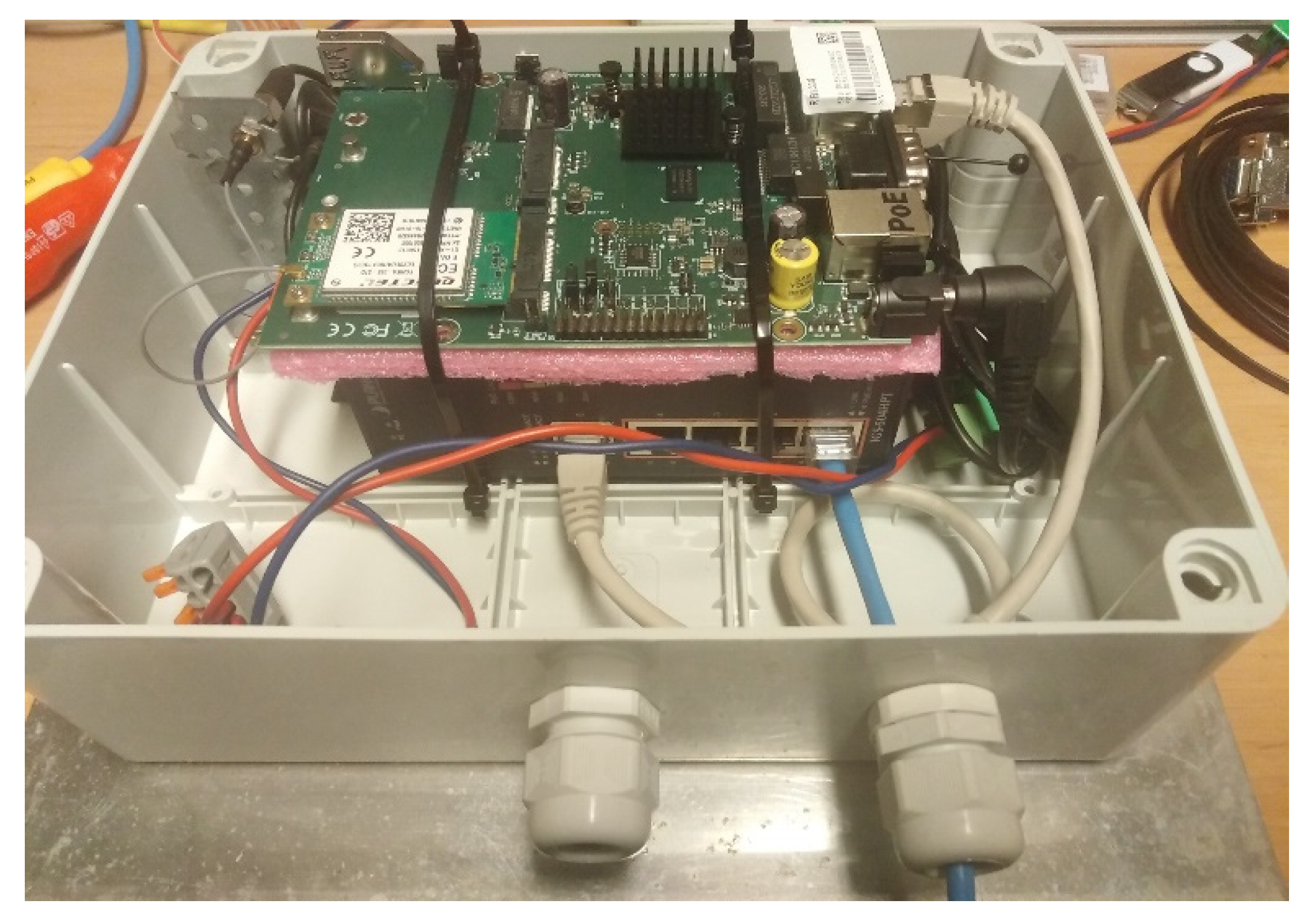
- The camera is connected to the POE power supply [54] (Power over Ethernet) using a UTP (Unshielded Twisted Pair) cable.
- The POE is connected to a modem [55] with an Ethernet interface and an embedded data SIM card with unlimited data.
- The data is sent via a GSM (Global System for Mobile Communications) interface to the server—the connection is via a remote desktop using a VPN (Virtual Private Network) protocol.
3.1. Study Hypothesis
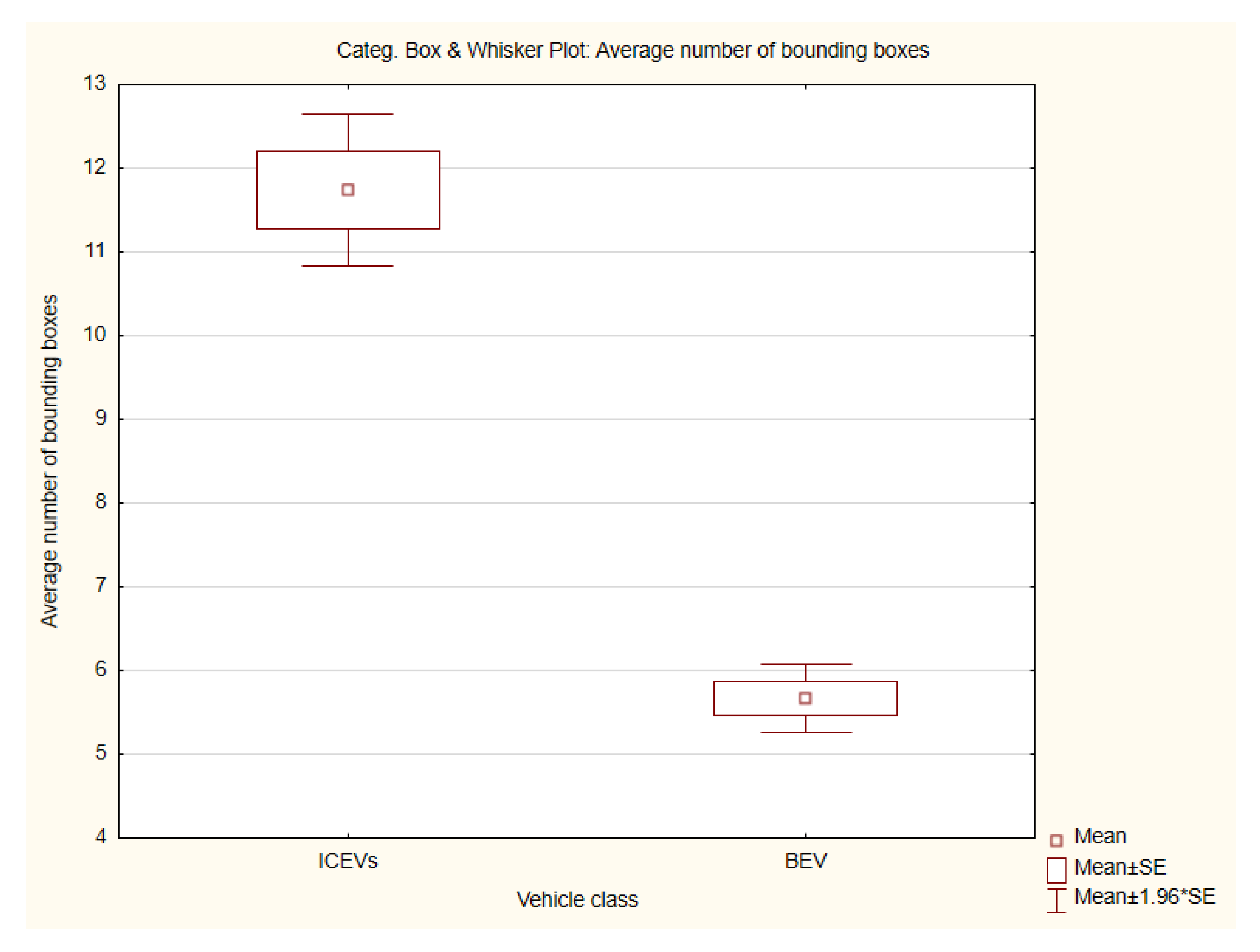
- Hypothesis H0: the ICEVs category does not have a significant difference in the average number of detection windows detected by the MSER algorithm compared to the BEV TESLA.
- Hypothesis H1: The ICEVs vehicle category has a significant difference in the average number of detection windows detected by the MSER algorithm compared to the BEV TESLA vehicle.
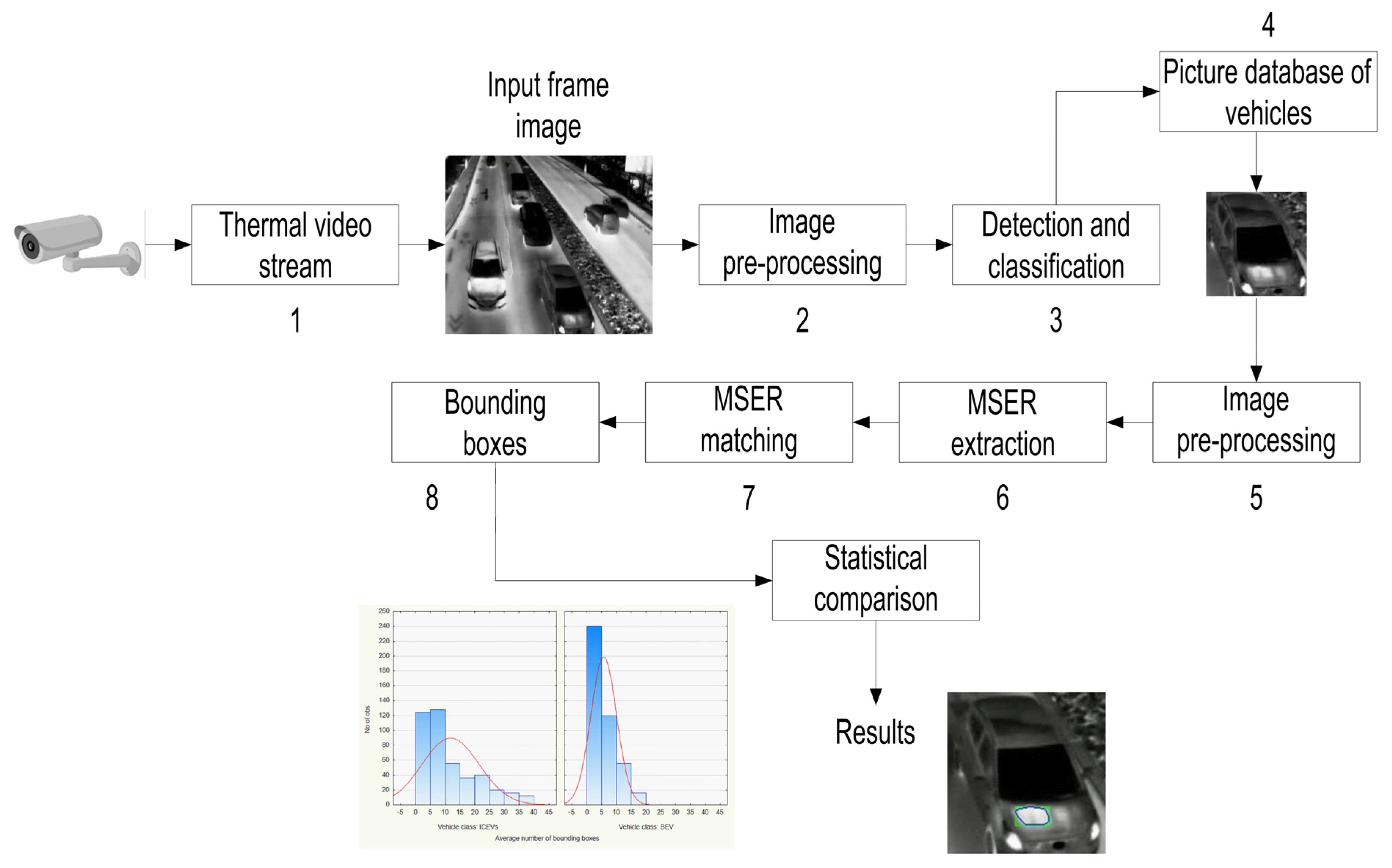
3.2. Proposed Method of Data Processing
- CAR;
- VAN;
- BUS.
- Assembling the thermal camera and its targeting.
- Cutting the video stream into individual frames based on FPS recording and pre-processing the frames (resizing) as a modified image input to train the object detector.
- Object detector training.
- Creation of vehicle database—breakdown into BEV TESLA and other ICEV categories.
- The algorithm retrieves an image of a detected vehicle from the database; the image is pre-processed.
- Detecting MSER regions.
- Matching MSER regions according to pre-set parameters.
- Formation of bounding boxes based on convex hulls of MSERs.
- Statistical comparison of bounding boxes between the BEV and ICEV categories.
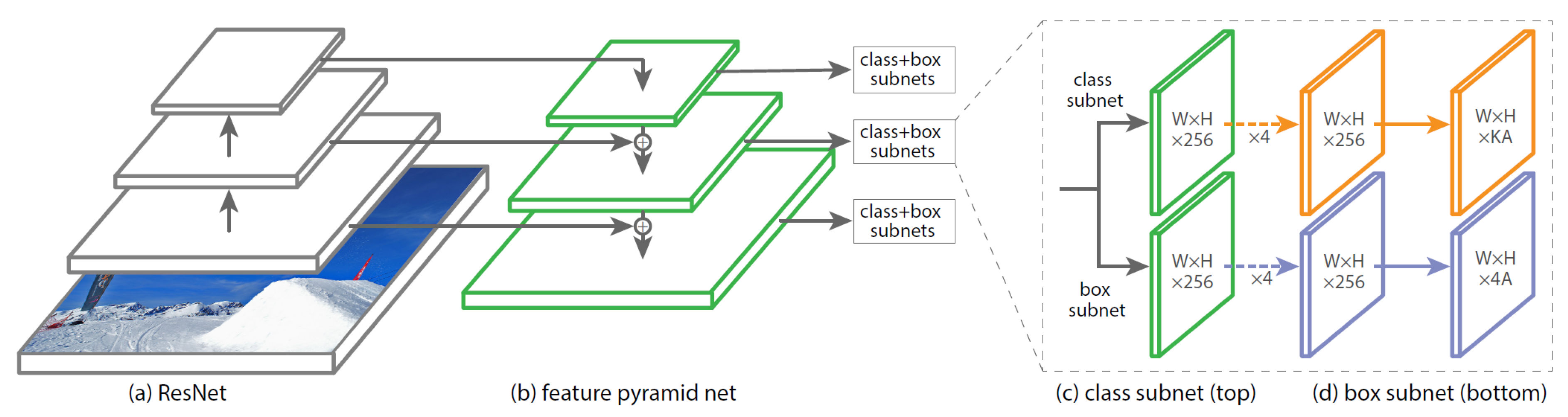
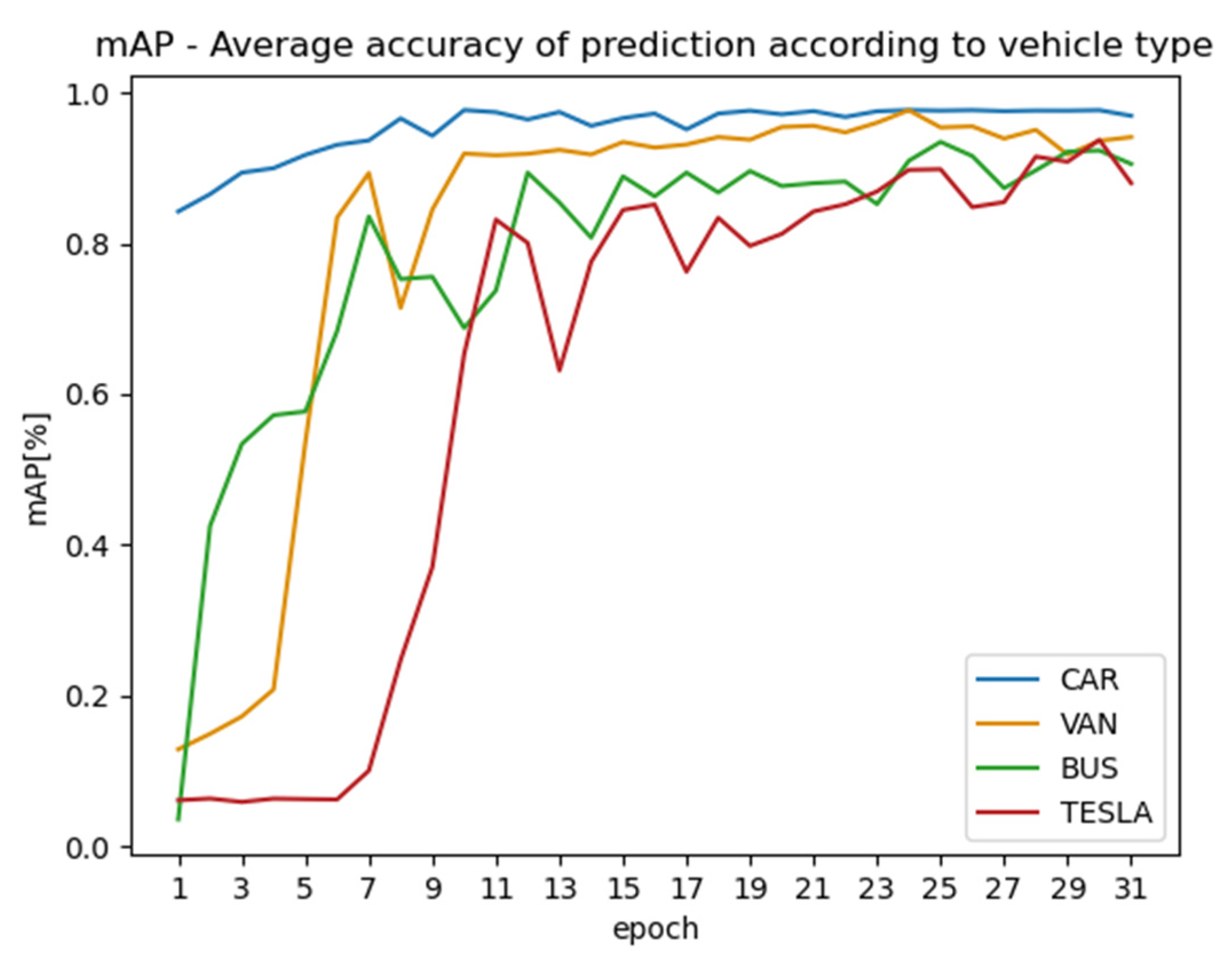
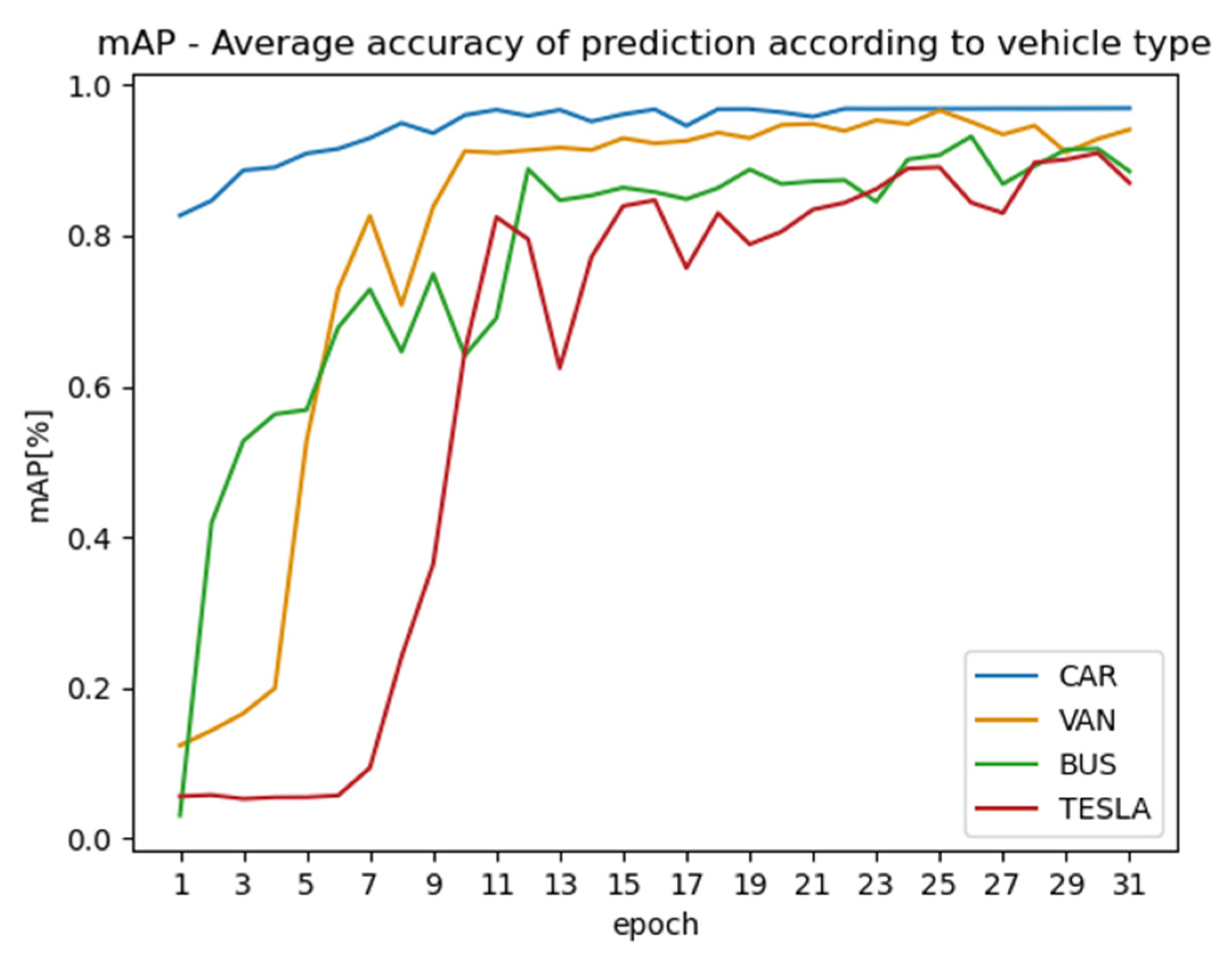
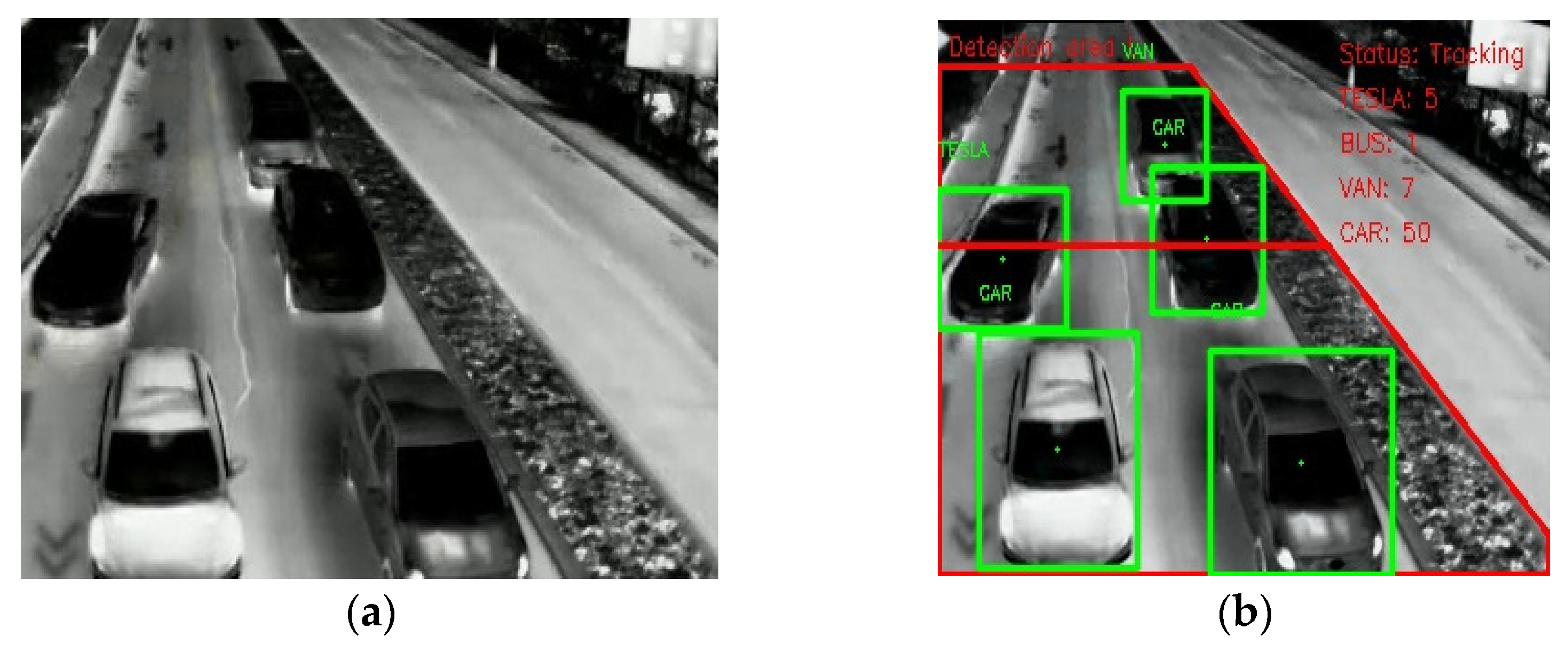
3.2.1. Object Detection
- Backbone network ResNet
- It is a pre-trained convolutional neural network.
- It is used to extract features from the input image.
- It works as a basic feature extractor for object detection.
- It uses the principle of truncated connections.
- Model RetinaNet
- Discretizes the output space of bounding boxes into a set of initial bounding boxes in different aspect ratios and scales according to the location on the feature map.
- At prediction time, the network generates a score for the presence of each object category in each initial bounding box and adjusts the box to better match the shape of the object.
- It combines predictions from multiple feature maps with different resolutions to naturally handle objects of different sizes.
- It uses a loss function, which is a dynamically scaled cross-entropy loss where the scaling factor decreases to zero as confidence in the correct class increases [24].
- Classification subnet—a subnetwork that extracts object class information from the object detector and solves classification problem.
- Regression subnet—subnetwork that extracts information about the coordinates of objects in the image from the FPN and solves the regression problem.
3.2.2. Image Pre-Processing
- Noise removal
- Image resizing
3.2.3. MSER Detection
- Maximally stable extremal regions creation;
- Select MSERs which belong to range of predetermined thresholds parameters;
- Create bounding boxes;
- Cull overlapping blobs;
- Make list of unique regions.
- Delta: Step size between intensity threshold levels. The more delta increases, the fewer regions are detected.
- Minimal area: Minimum total area of object in pixels.
- Maximum variation: Specify maximum region variation.
- IOU_thresh: IOU (intersection over union) threshold.
- Matrix: Matrix representation of image.
- Ranges of parameters according to Table 1 below were used to create hulls of MSERs.
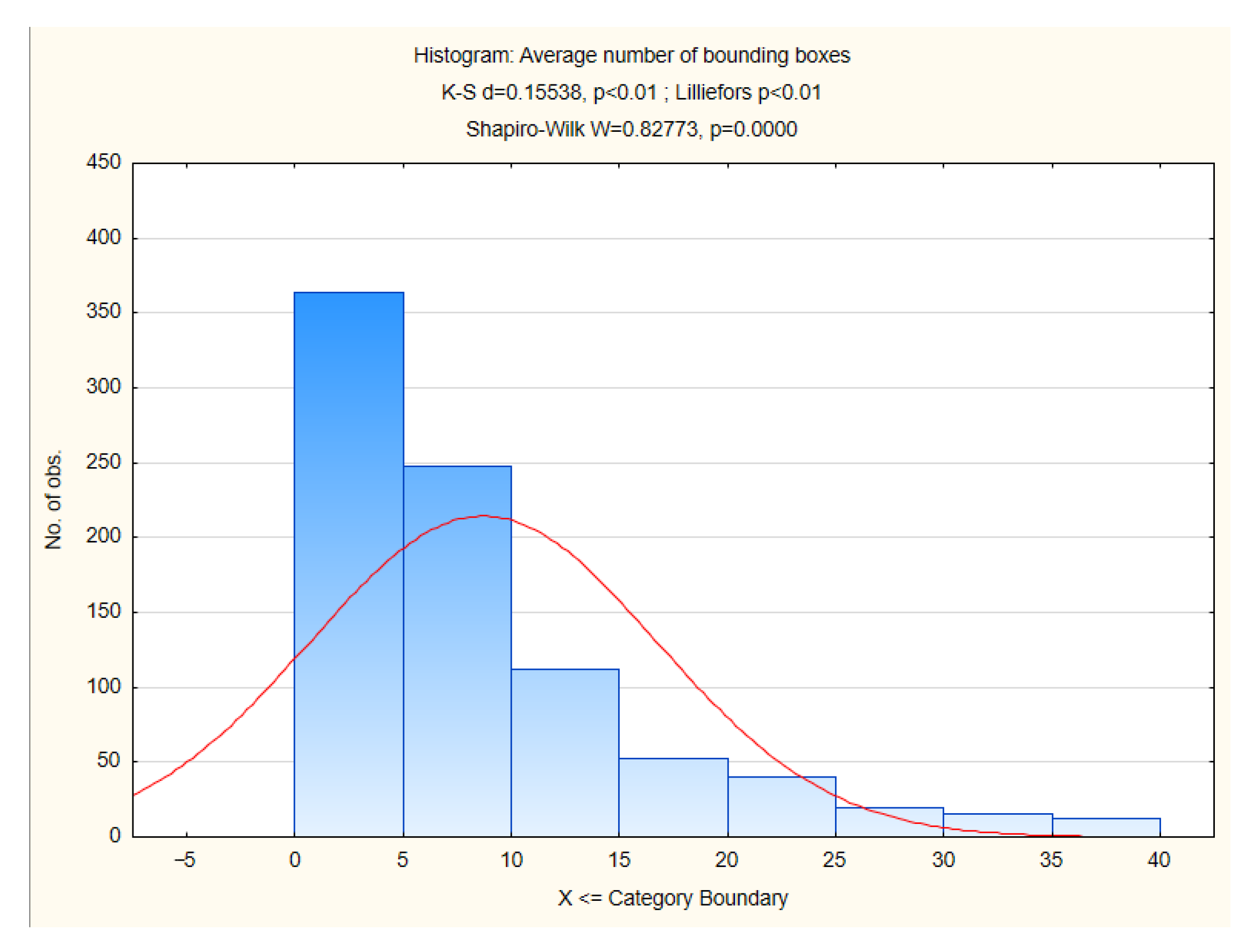
3.3. Statistical Metric for Network Evaluation
- Confusion matrix,
- Intersection over Union (IoU),
- Recall,
- Precision.
4. Analysis and Results
5. Discussion
- Complementing the MSER algorithm with an MSER region classifier using methods such as SVM, Hu moments and Random Naïve Bayes (RNB), etc.
- Extending the database with other BEV manufacturers and include other vehicle types such as trucks and deepening the quality of the object detector training and its accuracy results.
- Acquisition of infrared imagery and thermal data from tunnels and validation of the assumptions and hypotheses of use for security detection.
- Validation of vehicle detection in the categories of trucks and goods transport can have a major positive effect on safety in critical infrastructure, especially in tunnel structures, not only in terms of vehicle failures, semi-trailers, etc. but also in terms of goods transported. For example, the transport of dangerous goods under the ADR (Accord Dangereuses Route) agreement.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bastan, M.; Yap, K.H.; Chau, L.P. Remote detection of idling cars using infrared imaging and deep networks. Neural Comput. Appl. 2020, 32, 3047–3057. [Google Scholar] [CrossRef] [Green Version]
- Nam, Y.; Nam, Y.-C. Vehicle classification based on images from visible light and thermal cameras. EURASIP J. Image 2018, 2018. [Google Scholar] [CrossRef] [Green Version]
- Ligocki, A.; Jelinek, A.; Zalud, L.; Rahtu, E. Fully Automated DCNN-Based Thermal Images Annotation Using Neural Network Pretrained on RGB Data. Sensors 2021, 21, 1552. [Google Scholar] [CrossRef] [PubMed]
- Sangnoree, A.; Chamnongthai, K. Thermal-image processing and statistical analysis for vehicle category in nighttime traffic. J. Vis. Commun. Image Represent. 2017, 48, 88–109. [Google Scholar] [CrossRef]
- Akula, A.; Ghosh, R.; Kumar, S.; Sardana, H.K. WignerMSER: Pseudo-Wigner Distribution Enriched MSER Feature Detector for Object Recognition in Thermal Infrared Images. IEEE Sens. J. 2019, 19, 4221–4228. [Google Scholar] [CrossRef]
- Thomas, B.; Zebitz, S.; Jørgen, H.; Thorhauge, H.; Ole, B.; Osmann, T.K.; Bala, E.; Bo, Ø.; Jensen, O.B. Thermal Imaging Systems for Real-Time Applications in Smart Cities Gade. Int. J. Comput. Appl. Technol. 2016, 53, 291–308. [Google Scholar] [CrossRef] [Green Version]
- Fu, T.; Stipancic, J.; Zangenehpour, S.; Miranda-Moreno, L.; Saunier, N. Automatic Traffic Data Collection under Varying Lighting and Temperature Conditions in Multimodal Environments: Thermal versus Visible Spectrum Video-Based Systems. J. Adv. Transp. 2017, 2017, 5142732. [Google Scholar] [CrossRef]
- Gholamhosseinian, A.; Seitz, J. Vehicle Classification in Intelligent Transport Systems: An Overview, Methods and Software Perspective. IEEE Open J. Intell. Transp. Syst. 2021, 2, 173–194. [Google Scholar] [CrossRef]
- Vollmer, M.; Möllmann, K.-P. Infrared Thermal Imaging: Fundamentals, Research and Applications; John Wiley & Sons: Weinheim, Germany, 2018; ISBN 978-3-527-41351-5. [Google Scholar]
- Zhou, J.; Gao, D.; Zhang, D. Moving Vehicle Detection for Automatic Traffic Monitoring. IEEE Trans. Veh. Technol. 2007, 56, 51–59. [Google Scholar] [CrossRef] [Green Version]
- Brož, J.; Tichý, T.; Angelakis, V.; Bělinová, Z. Usage of V2X Applications in Road Tunnels. Appl. Sci. 2022, 12, 4624. [Google Scholar] [CrossRef]
- Hruboš, M.; Nemec, D.; Bubeníková, E.; Holečko, P.; Spalek, J.; Mihálik, M.; Bujňák, M.; Andel, J.; Tichy, T. Model-based predictive detector of a fire inside the road tunnel for intelligent vehicles. J. Adv. Transp. 2021, 2021, 663494. [Google Scholar] [CrossRef]
- Bosilj, P.; Kijak, E.; Lefèvre, S.; Bosilj, P.; Kijak, E.; Lefèvre, S.; Mser, B.; Stable, M. Beyond MSER: Maximally Stable Regions using Tree of Shapes. In Proceedings of the British Machine Vision Conference (BMVC), Cardiff, UK, 9–12 September 2019. [Google Scholar]
- Nistor, S.C.; Ileni, T.A.; Dărăbant, A.S. Automatic development of deep learning architectures for image segmentation. Sustainability 2020, 12, 9707. [Google Scholar] [CrossRef]
- Avery, R.P.; Wang, Y.; Rutherford, G.S. Length-based vehicle classification using images from uncalibrated video cameras. In Proceedings of the 7th International IEEE Conference on Intelligent Transportation Systems, Washington, WA, USA, 3–6 October 2004; pp. 737–742. [Google Scholar] [CrossRef]
- Zangenehpour, S.; Miranda-Moreno, L.F.; Saunier, N. Automated classification based on video data at intersections with heavy pedestrian and bicycle traffic: Methodology and application. Transp. Res. Part C Emerg. Technol. 2015, 56, 161–176. [Google Scholar] [CrossRef]
- Murthy, C.B.; Hashmi, M.F.; Bokde, N.D.; Geem, Z.W. Investigations of object detection in images/videos using various deep learning techniques and embedded platforms-A comprehensive review. Appl. Sci. 2020, 10, 3280. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet classification with deep convolutional neural networks. NIPS 2012, 60, 84–90. [Google Scholar] [CrossRef] [Green Version]
- Song, H.; Liang, H.; Li, H.; Dai, Z.; Yun, X. Vision-based vehicle detection and counting system using deep learning in highway scenes. Eur. Transp. Res. Rev. 2019, 11, 51. [Google Scholar] [CrossRef] [Green Version]
- Zou, Z.; Shi, Z.; Guo, Y.; Ye, J. Object Detection in 20 Years: A Survey. arXiv 2019, arXiv:1905.05055. [Google Scholar]
- Arinaldi, A.; Pradana, J.A.; Gurusinga, A.A. Detection and classification of vehicles for traffic video analytics. Procedia Comput. Sci. 2018, 144, 259–268. [Google Scholar] [CrossRef]
- Wu, J. Introduction to Convolutional Neural Networks. arXiv 2015, arXiv:1511.08458. [Google Scholar]
- Rosebrock, A. Deep Learning for Computer Vision with Python (ImageNet); PyImageSearch: Albuquerque, NM, USA, 2017. [Google Scholar]
- Lin, T.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal Loss for Dense Object Detection. arXiv 2017, arXiv:1708.02002. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef] [PubMed]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.-Y.; Berg, A.C. SSD: Single Shot MultiBox Detector. In Proceedings of the The European Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 21–37. [Google Scholar]
- Lin, T.-Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature Pyramid Networks for Object Detection. In Proceedings of the 2019 IEEE International Conference on Parallel & Distributed Processing with Applications, Big Data & Cloud Computing, Sustainable Computing & Communications, Social Computing & Networking, Xiamen, China, 16–18 December 2019; pp. 1500–1504. [Google Scholar] [CrossRef]
- Dong, Z.; Pei, M.; He, Y.; Liu, T.; Dong, Y.; Jia, Y. Vehicle type classification using unsupervised convolutional neural network. In Proceedings of the 2014 22nd International Conference on Pattern Recognition, Stockholm, Sweden, 24–28 August; pp. 172–177. [CrossRef]
- Bautista, C.M.; Dy, C.A.; Mañalac, M.I.; Orbe, R.A.; Cordel, M.; Manalac, M.I.; Orbe, R.A.; Cordel, M. Convolutional neural network for vehicle detection in low resolution traffic videos. In Proceedings of the 2016 IEEE Region 10 Symposium (TENSYMP), Bali, Indonesia, 9–11 May 2016; 2016; pp. 277–281. [Google Scholar]
- Fan, Q.; Brown, L.; Smith, J. A closer look at Faster R-CNN for vehicle detection. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gothenburg, Sweden, 19–22 June 2016; pp. 124–129. [Google Scholar] [CrossRef]
- Chu, W.; Liu, Y.; Shen, C.; Cai, D.; Hua, X.S. Multi-task vehicle detection with region-of-interest voting. IEEE Trans. Image Process. 2018, 27, 432–441. [Google Scholar] [CrossRef]
- Cai, Y.; Liu, Z.; Sun, X.; Chen, L.; Wang, H.; Zhang, Y. Vehicle Detection Based on Deep Dual-Vehicle Deformable Part Models. J. Sensors 2017, 2017, 5627281. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Liu, Y.; Zhao, Z.; Zhang, Y.; He, L. A deep learning approach of vehicle multitarget detection from traffic video. J. Adv. Transp. 2018, 2018, 7075814. [Google Scholar] [CrossRef] [Green Version]
- Yoichiro, I. A method of robust moving vehicle detection for bad weather using an infrared thermography camera. In Proceedings of the 2008 International Conference on Wavelet Analysis and Pattern Recognition, Hong Kong, China, 30–31 August 2008; 2008; Volume 1, pp. 86–90. [Google Scholar]
- Iwasaki, Y.; Misumi, M.; Nakamiya, T. Robust Vehicle Detection under Various Environments to Realize Road Traffic Flow Surveillance Using an Infrared Thermal Camera. Sci. World J. 2015, 2015, 947272. [Google Scholar] [CrossRef] [Green Version]
- Iwasaki, Y.; Misumi, M.; Nakamiya, T. Robust Vehicle Detection under Various Environmental Conditions Using an Infrared Thermal Camera and Its Application to Road Traffic Flow Monitoring. Sensors 2013, 13, 7756–7773. [Google Scholar] [CrossRef]
- Svorc, D.; Tichy, T.; Ruzicka, M. Detection of the electric vehicle using thermal characteristics. In Proceedings of the 2020 Smart City Symposium Prague (SCSP), Prague, Czech Republic, 25 June 2020; 2020; pp. 1–5. [Google Scholar]
- Tichý, T.; Švorc, D.; Růžička, M.; Bělinová, Z. Thermal Feature Detection of Vehicle Categories in the Urban Area. Sustainability 2021, 13, 6873. [Google Scholar] [CrossRef]
- Teutsch, M.; Krüger, W. Classification of small boats in infrared images for maritime surveillance. In Proceedings of the 2010 International WaterSide Security Conference, Carrara, Italy, 3–5 November 2010. [Google Scholar] [CrossRef]
- Teutsch, M.; Müller, T. Hot spot detection and classification in LWIR videos for person recognition. Autom. Target Recognit. XXIII 2013, 8744, 87440F. [Google Scholar] [CrossRef]
- Kuchár, P.; Pirník, R.; Tichý, T.; Rástočný, K.; Skuba, M.; Tettamanti, T.; Ruiz, J.A.; Llamazares, A.; Lauer, M.; Cartenì, A. Noninvasive Passenger Detection Comparison Using Thermal Imager and IP Cameras. Sustainability 2021, 13, 12928. [Google Scholar] [CrossRef]
- Matas, J.; Chum, O.; Urban, M.; Pajdla, T. Robust wide-baseline stereo from maximally stable extremal regions. Image Vis. Comput. 2004, 22, 761–767. [Google Scholar] [CrossRef]
- Nistér, D.; Stewénius, H. Linear Time Maximally Stable Extremal Regions. In Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Berlin/Heidelberg, Germany, 2008; pp. 183–196. Volume 5303, ISBN 3540886850. [Google Scholar]
- Obdrzalek, S.; Matas, J. Object Recognition using Local Affine Frames on Distinguished Regions. In Proceedings of the British Machine Vision Conference 2002, Cardiff, UK, 2–5 September 2002; p. 9. [Google Scholar]
- Donoser, M.; Bischof, H. Efficient Maximally Stable Extremal Region (MSER) tracking. In Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, New York, NY, USA, 17–22 June 2006; Volume 1, pp. 553–560. [Google Scholar] [CrossRef]
- Kristensen, F.; Maclean, W.J. Real-time extraction of maximally stable extremal regions on an FPGA. In Proceedings of the 2007 IEEE International Symposium on Circuits and Systems, New Orleans, LA, USA, 27–30 May 2007; pp. 165–168. [Google Scholar] [CrossRef]
- Forss, P.; Lowe, D.G. Shape Descriptors for Maximally Stable Extremal Regions. In Proceedings of the 2007 IEEE 11th International Conference on Computer Vision, Rio de Janeiro, Brazil, 14–21 October 2007; p. 8. [Google Scholar] [CrossRef] [Green Version]
- Bosilj, P.; Lefèvre, S.; Kijak, E.; Bosilj, P.; Lefèvre, S.; Kijak, E.; Image, H.; Simplification, R.; Bosilj, P. Hierarchical Image Representation Simplification Driven by Region Complexity. Image Anal. Process. 2013, 8156, 562–571. [Google Scholar] [CrossRef] [Green Version]
- Huang, W.; Qiao, Y.; Tang, X. Robust scene text detection with convolution neural network induced MSER trees. In Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Berlin/Heidelberg, Germany, 2014; Volume 8692, pp. 497–511. [Google Scholar] [CrossRef] [Green Version]
- Jones, R. Component Trees for Image Filtering and Segmentation. Available online: ttps://www.iwaenc.org/proceedings/1997/nsip97/pdf/scan/ns970311.pdf (accessed on 18 October 2022).
- Caselles, V.; Monasse, P. Geometric Description of Images as Topographic Maps; Springer: Berlin/Heidelberg, Germany, 2010; Volume 1984. [Google Scholar] [CrossRef]
- ThermiCam2—The World’s First Integrated Thermal Traffic Detector|Teledyne FLIR. Available online: https://www.flir.eu/products/thermicam2/?model=10-7432 (accessed on 21 August 2022).
- User Manual TRAFICAM X-STREAM2 EU. Available online: https://www.flir.eu/support/ (accessed on 15 August 2022).
- i4wifi.cz|PLANET IGS-504HPT. Available online: https://www.i4wifi.cz/cs/180572-planet-prumyslovy-poe-switch-5x1gb-4x-poe-802-3at-36-120w-40az75-c-dual-12-56vdc-ip40-fanless?gclid=Cj0KCQjwr4eYBhDrARIsANPywCgTBhynU1qWAq1Mn6YSGhbka3RuFRxq8W8wSMTNrhIEoRS-UqcXzEgaAiCxEALw_wcB (accessed on 21 August 2022).
- i4wifi.cz|Routerboard MikroTik RBM33G. Available online: https://www.i4wifi.cz/cs/211077-routerboard-mikrotik-rbm33g (accessed on 21 August 2022).
- Švorc, D.; Tichý, T.; Růžička, M. An infrared video detection and categorization system based on machine learning. Neural Netw. World 2021, 31, 261–277. [Google Scholar] [CrossRef]
- Google TensorFlow. Available online: https://www.tensorflow.org/ (accessed on 7 October 2022).
- TzuTa Lin LabelImg Heartexlabs/LabeIimg Wiki GitHub. Available online: https://github.com/heartexlabs/labelImg/wiki/LabelImg (accessed on 26 November 2022).
- Home-OpenCV. Available online: https://opencv.org/ (accessed on 7 October 2022).
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Chollet, F. Others Keras: The Python Deep Learning API. Available online: https://keras.io/ (accessed on 24 March 2021).
- Perd’och, M. Maximally Stable Extremal Regions and Local Geometry for Visual Correspondences. Ph.D. Thesis, CTU PRAGUE, Prague, Czech Republic, 2011. [Google Scholar]
- VLFeat-Tutorials > MSER Feature Detector. Available online: https://www.vlfeat.org/overview/mser.html (accessed on 3 September 2022).
- Mean Average Precision (mAP) Explained: Everything You Need to Know. Available online: https://www.v7labs.com/blog/mean-average-precision (accessed on 31 October 2022).
- Mean Average Precision (mAP) Explained|Paperspace Blog. Available online: https://blog.paperspace.com/mean-average-precision/ (accessed on 28 November 2021).
- MAP (Mean Average Precision) Might Confuse You!|by Shivy Yohanandan|Towards Data Science. Available online: https://towardsdatascience.com/map-mean-average-precision-might-confuse-you-5956f1bfa9e2 (accessed on 21 October 2022).
- Dodge, Y. The Concise Encyclopedia of Statistics; Springer: New York, NY, USA, 2008; ISBN 978-0-387-31742-7. [Google Scholar]
- Anatomy of Loss Functions: Questions and Answers-SDS Club. Available online: https://sdsclub.com/anatomy-of-loss-functions-questions-and-answers/ (accessed on 22 October 2022).
- Tichy, T.; Broz, J.; Smerda, T.; Lokaj, Z. Application of Cybersecurity Approaches within Smart Cities and ITS. In Proceedings of the 2022 Smart City Symposium Prague (SCSP), Prague, Czech Republic, 26–27 May 2022; 2022; pp. 1–7. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Range of Parameters | Effect of Increase on the Number of Detections |
|---|---|---|
| ∆ | 1–10 | decrease |
| Minimal_Area | 400, 500, 600 | decrease |
| Maximum_variation | 0.1, 0.15, 0.2, 0.25 | increase |
| IOU_thresh | 0.7, 0.8, 0.9, 0.95 | increase |
| Key Findings | Proposed System |
|---|---|
| Vehicle detection | Classification of the type (BEV/ICEV) of vehicle |
| Data verification | Statistical confirmation of thermal differentiation of BEV and ICEV propulsions |
| Innovation | Concept of thermal detection and usage of MSER alg. for classification of vehicle propulsions |
| Applicability | Testing and operation in real traffic conditions |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Švorc, D.; Tichý, T.; Růžička, M.; Ivasienko, P. Use of One-Stage Detector and Feature Detector in Infrared Video on Transport Infrastructure and Tunnels. Sustainability 2023, 15, 2122. https://doi.org/10.3390/su15032122
Švorc D, Tichý T, Růžička M, Ivasienko P. Use of One-Stage Detector and Feature Detector in Infrared Video on Transport Infrastructure and Tunnels. Sustainability. 2023; 15(3):2122. https://doi.org/10.3390/su15032122
Chicago/Turabian StyleŠvorc, David, Tomáš Tichý, Miroslav Růžička, and Petr Ivasienko. 2023. "Use of One-Stage Detector and Feature Detector in Infrared Video on Transport Infrastructure and Tunnels" Sustainability 15, no. 3: 2122. https://doi.org/10.3390/su15032122