

Multi-Temporal InSAR Deformation Monitoring Zongling Landslide Group in Guizhou Province Based on the Adaptive Network Method
 , , , ,
, , , ,
Abstract
:1. Introduction
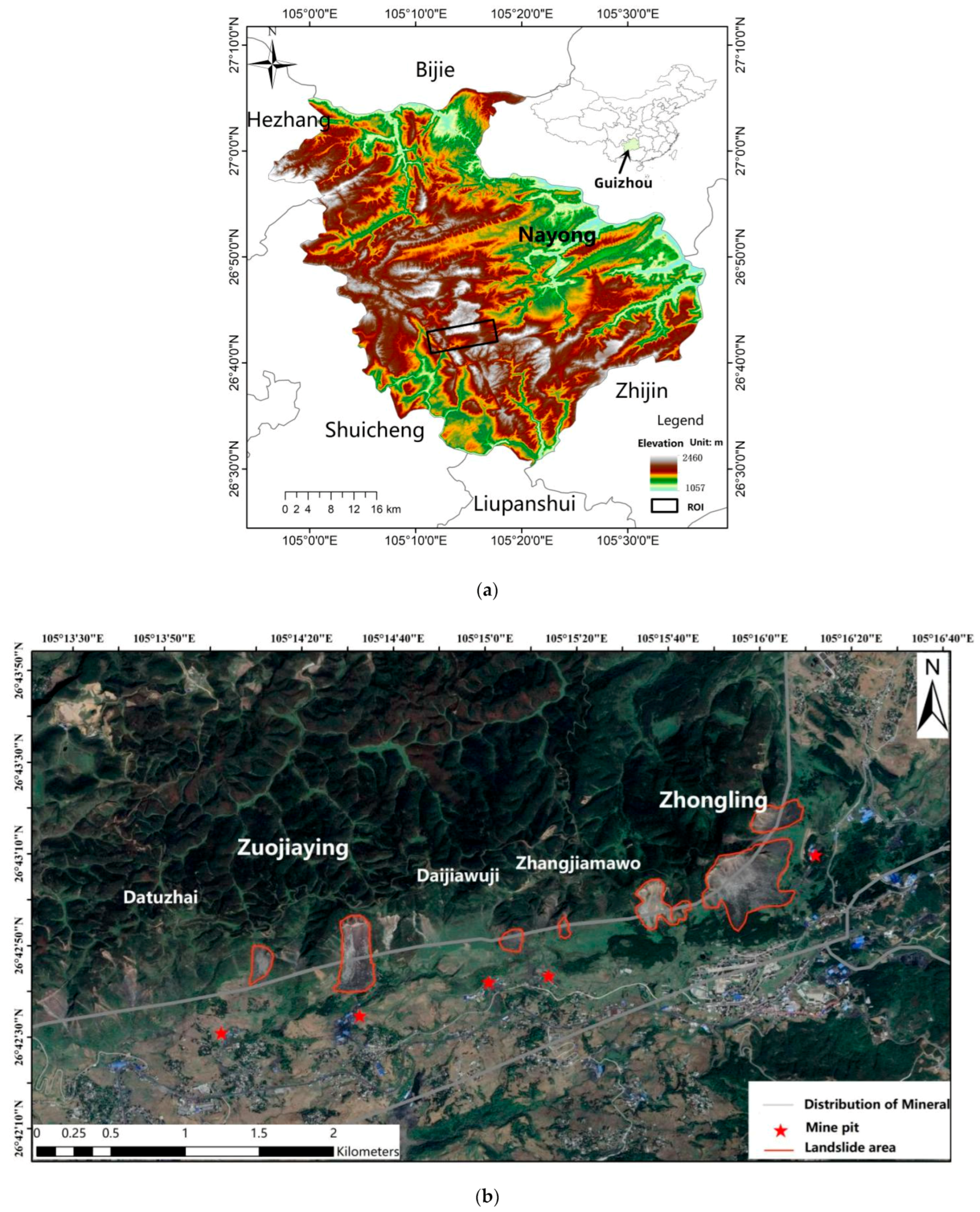
2. Study Area and Data Source
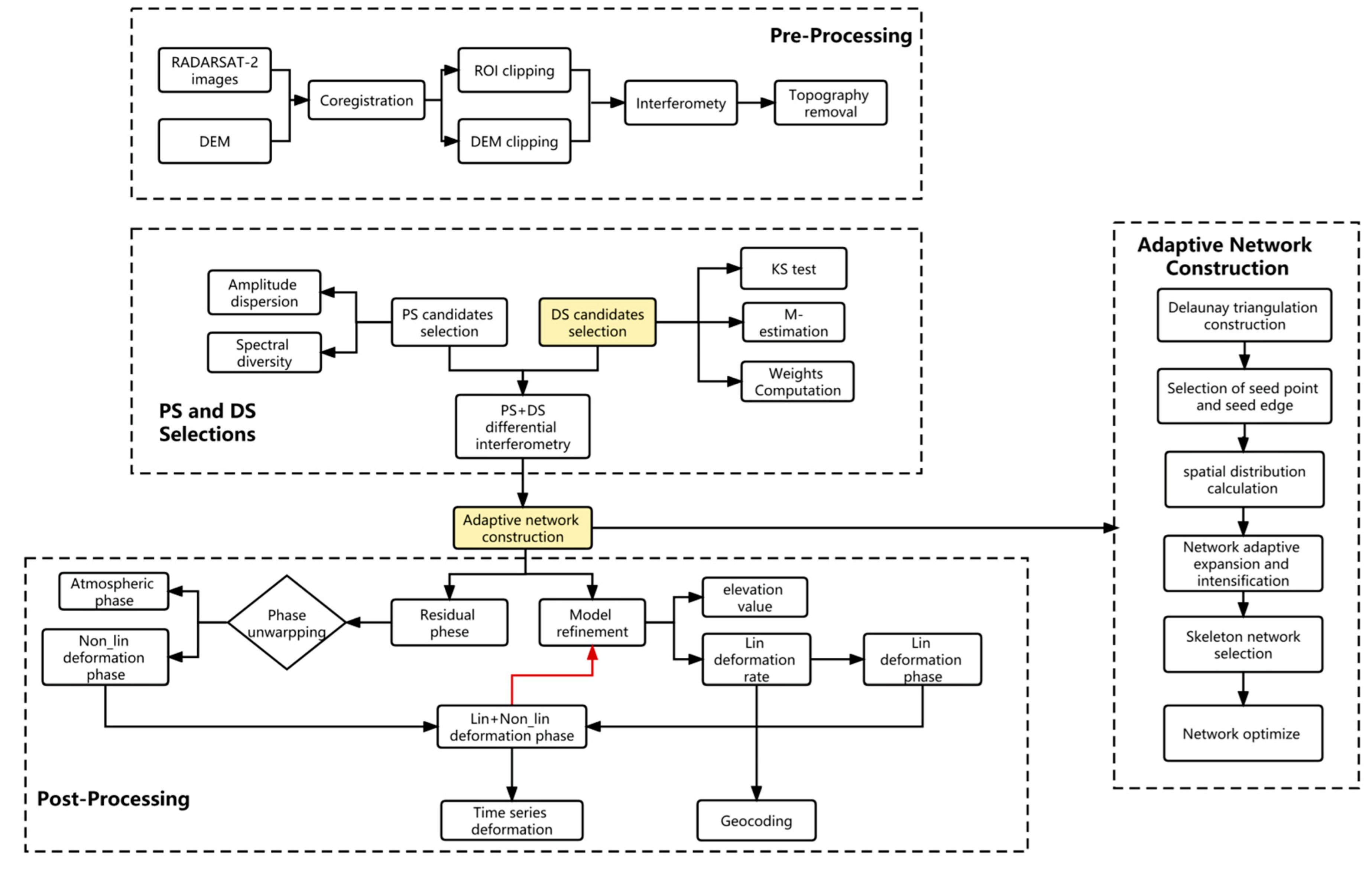
3. Method
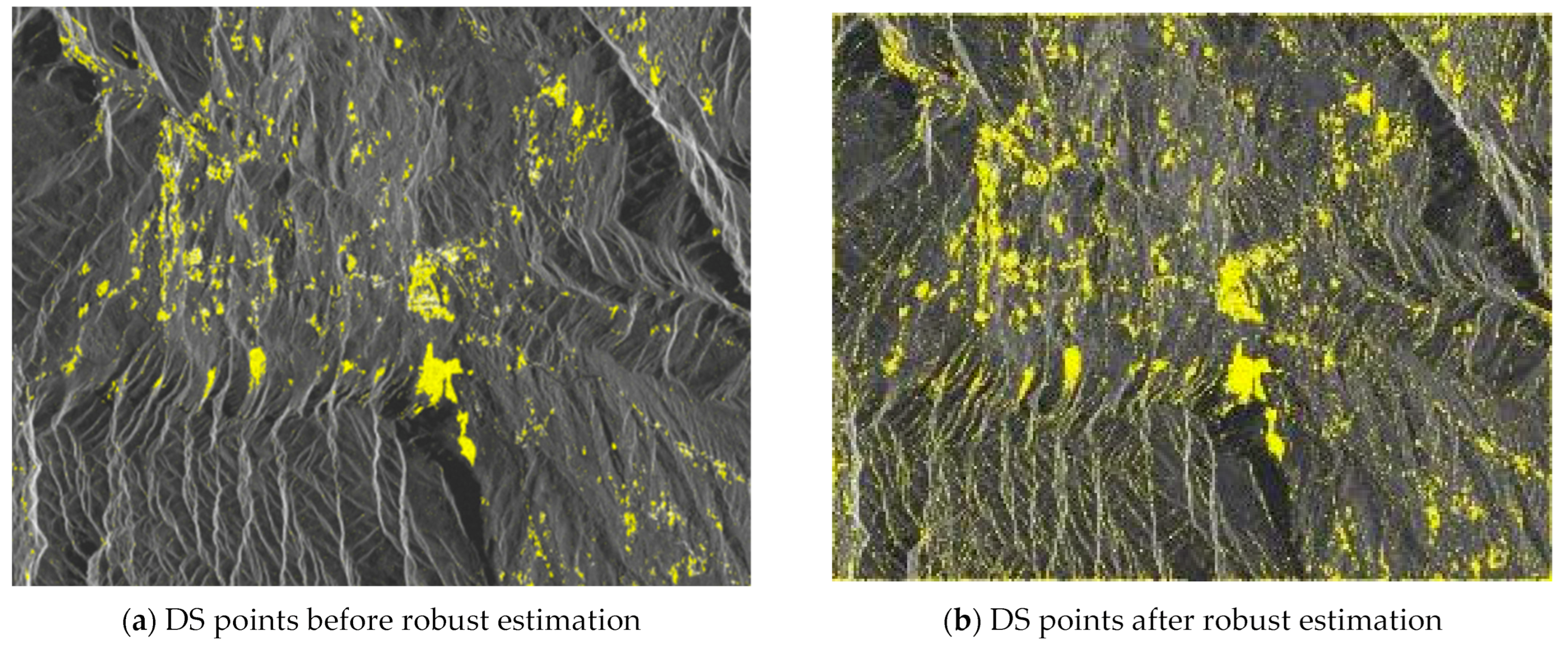
3.1. Robust Estimation of DS Points
3.2. Adaptive Network
3.2.1. Initial Delaunay Triangulation Network Construction
3.2.2. Selection of Seed Point and Seed Edge
3.2.3. Adaptive Expansion and Intensification of Network
3.2.4. Selection of the Skeleton Network and Network Optimization
4. Experimental Results
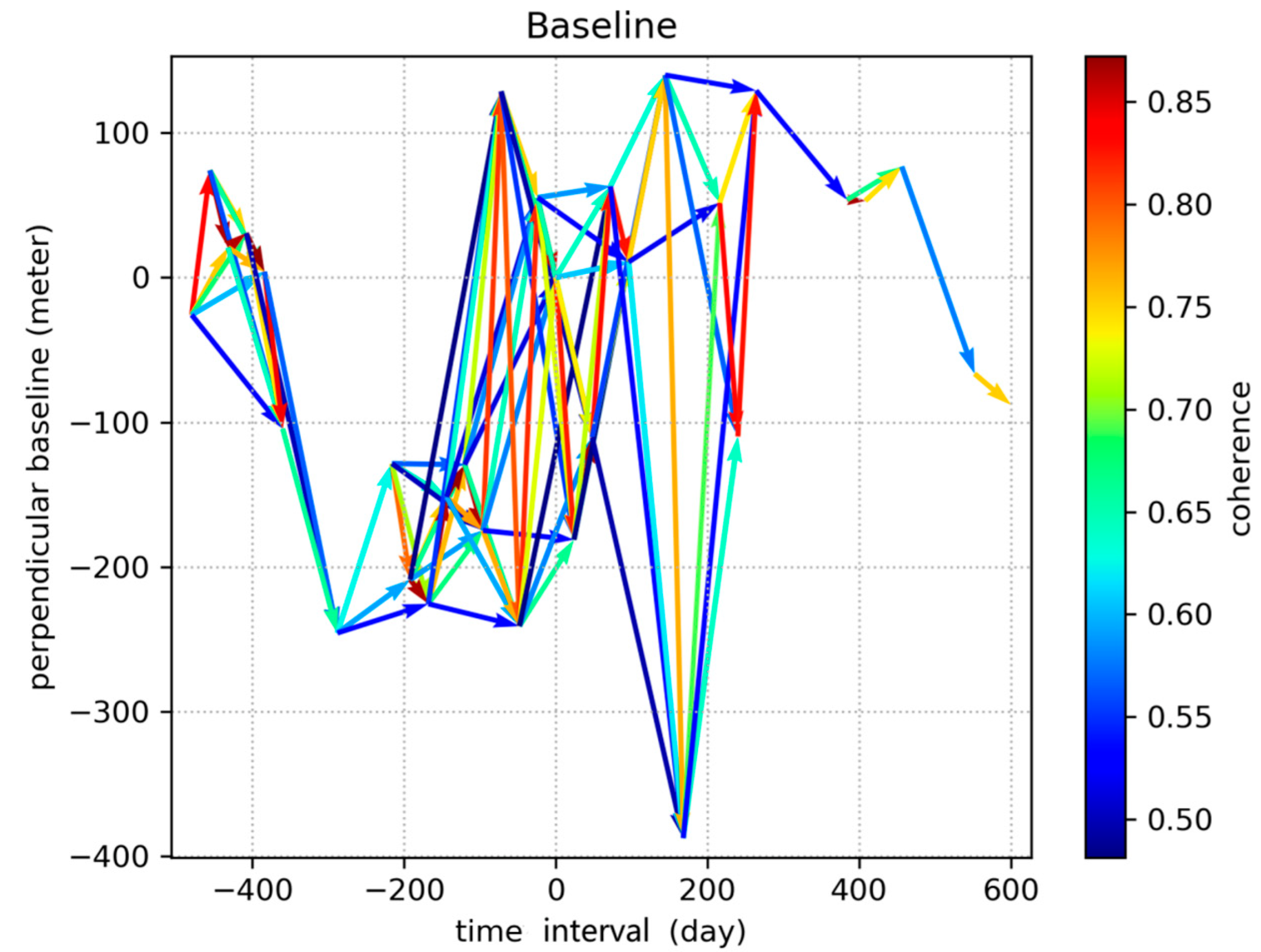
4.1. RADARSAT-2 Pre-Processing
4.2. PS and DS Selections
4.3. Adaptive Network Construction
4.4. Post-Processing
5. Discussion
5.1. Analysis of Robust Estimation Results
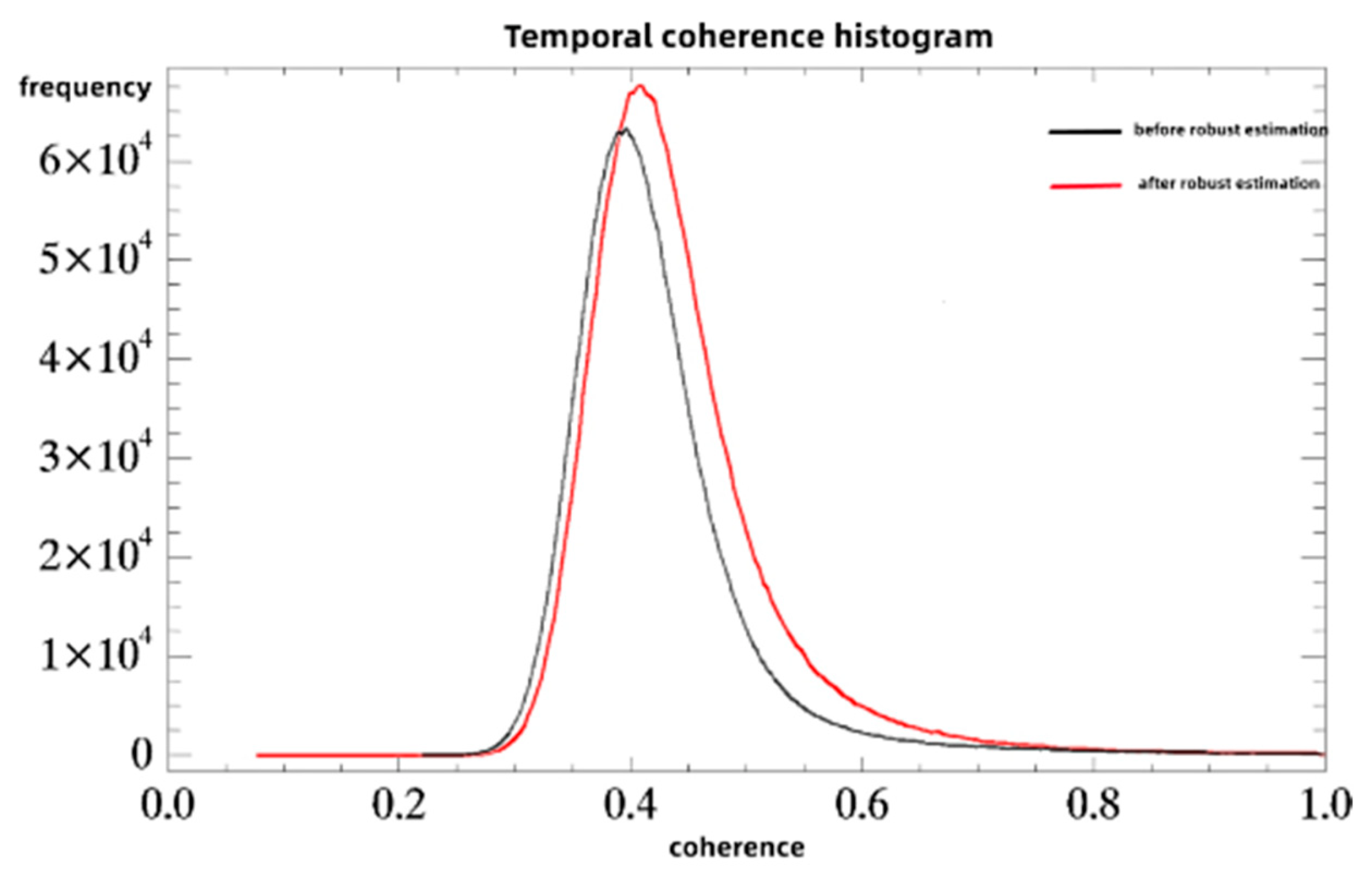
5.1.1. Temporal Coherence
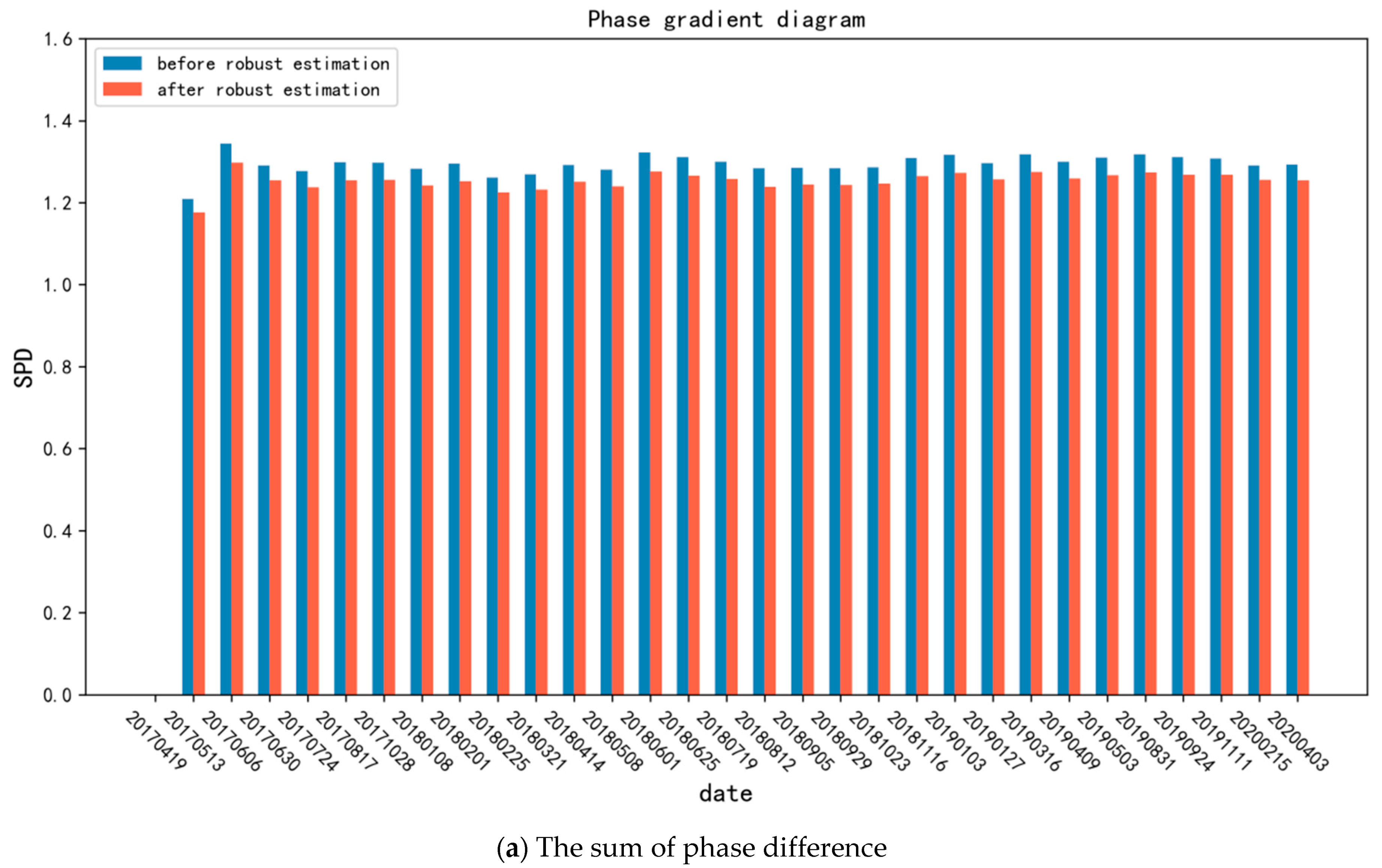
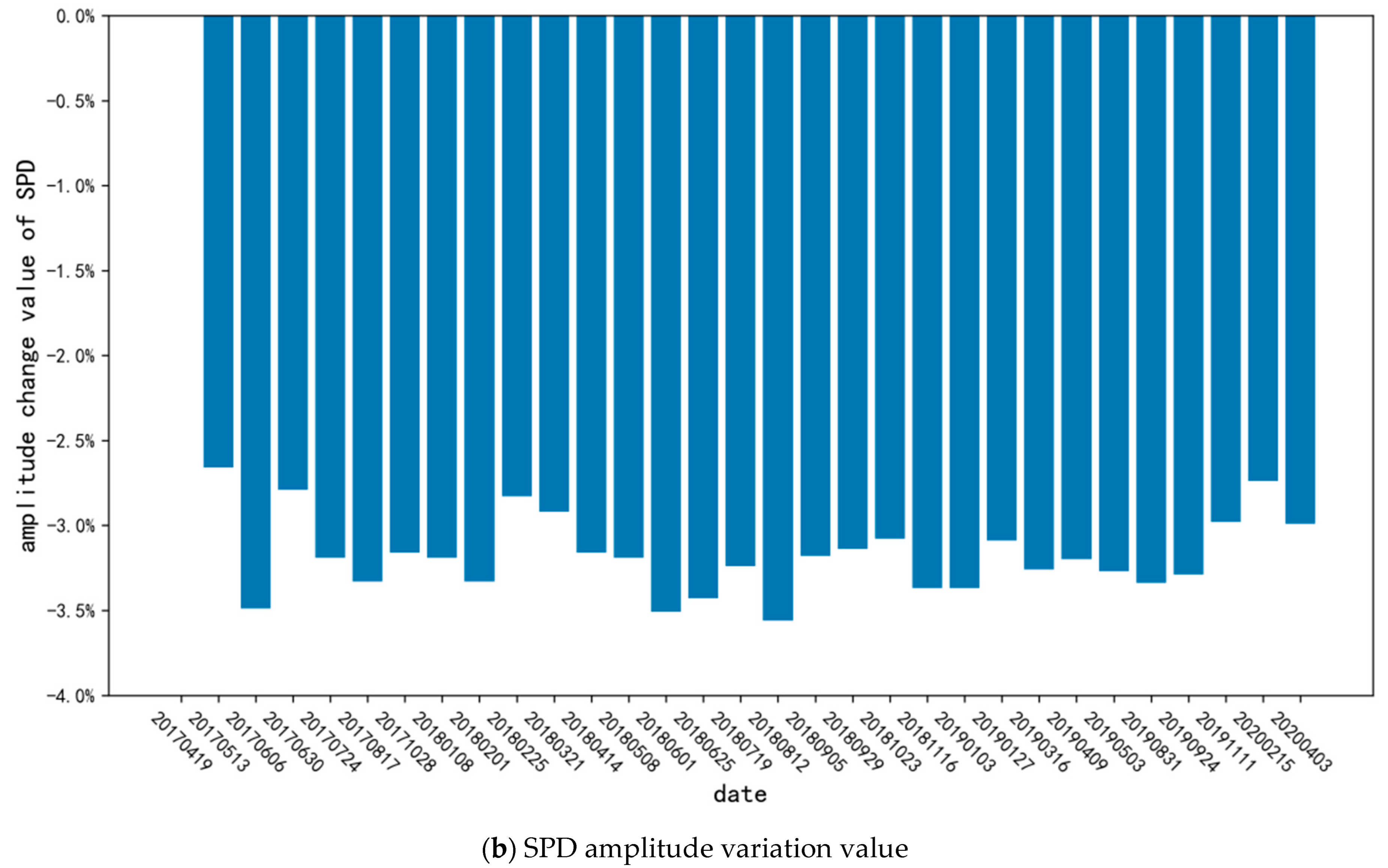
5.1.2. Interferometry Phase
5.2. Adaptive Network Analysis
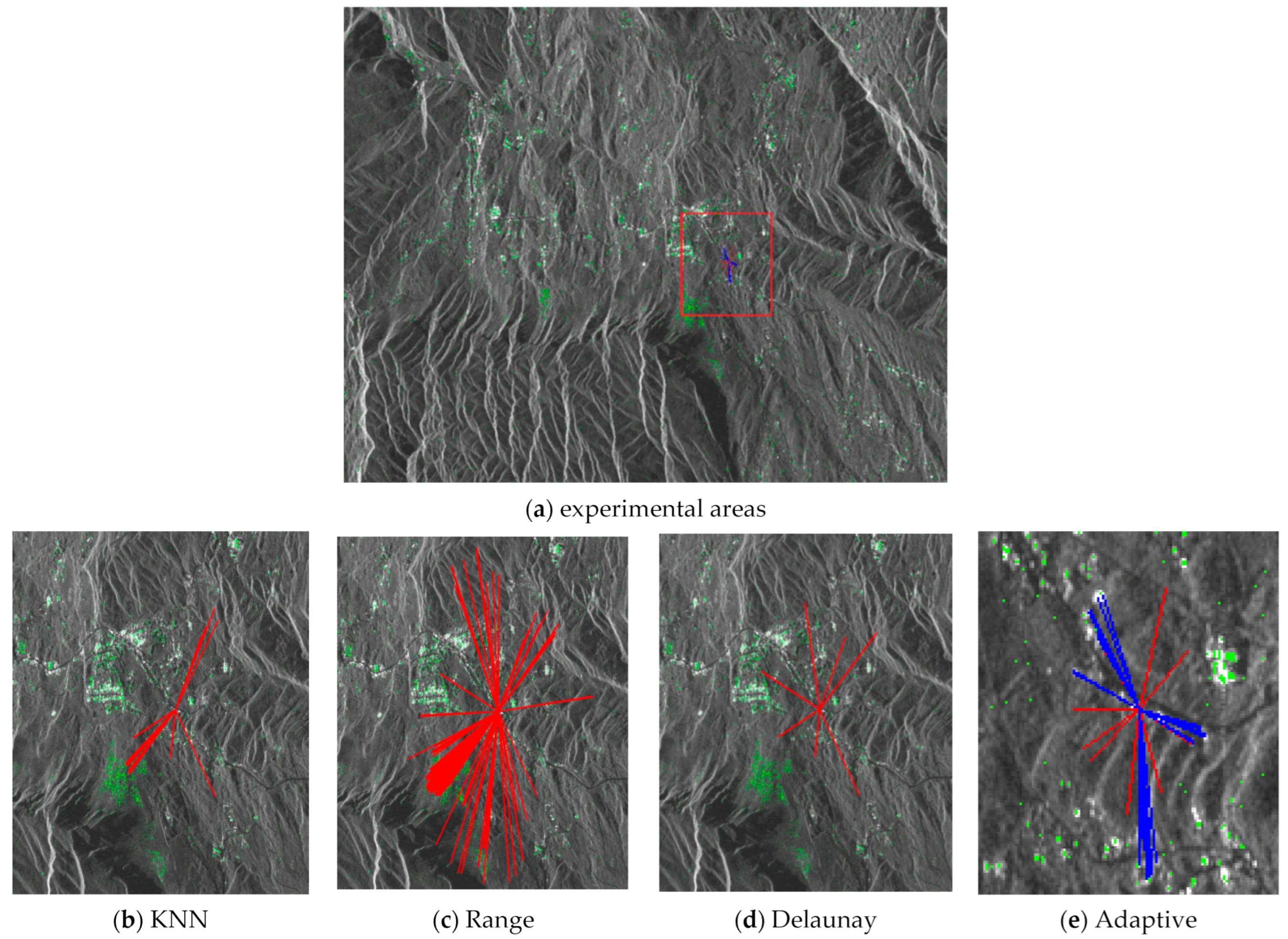
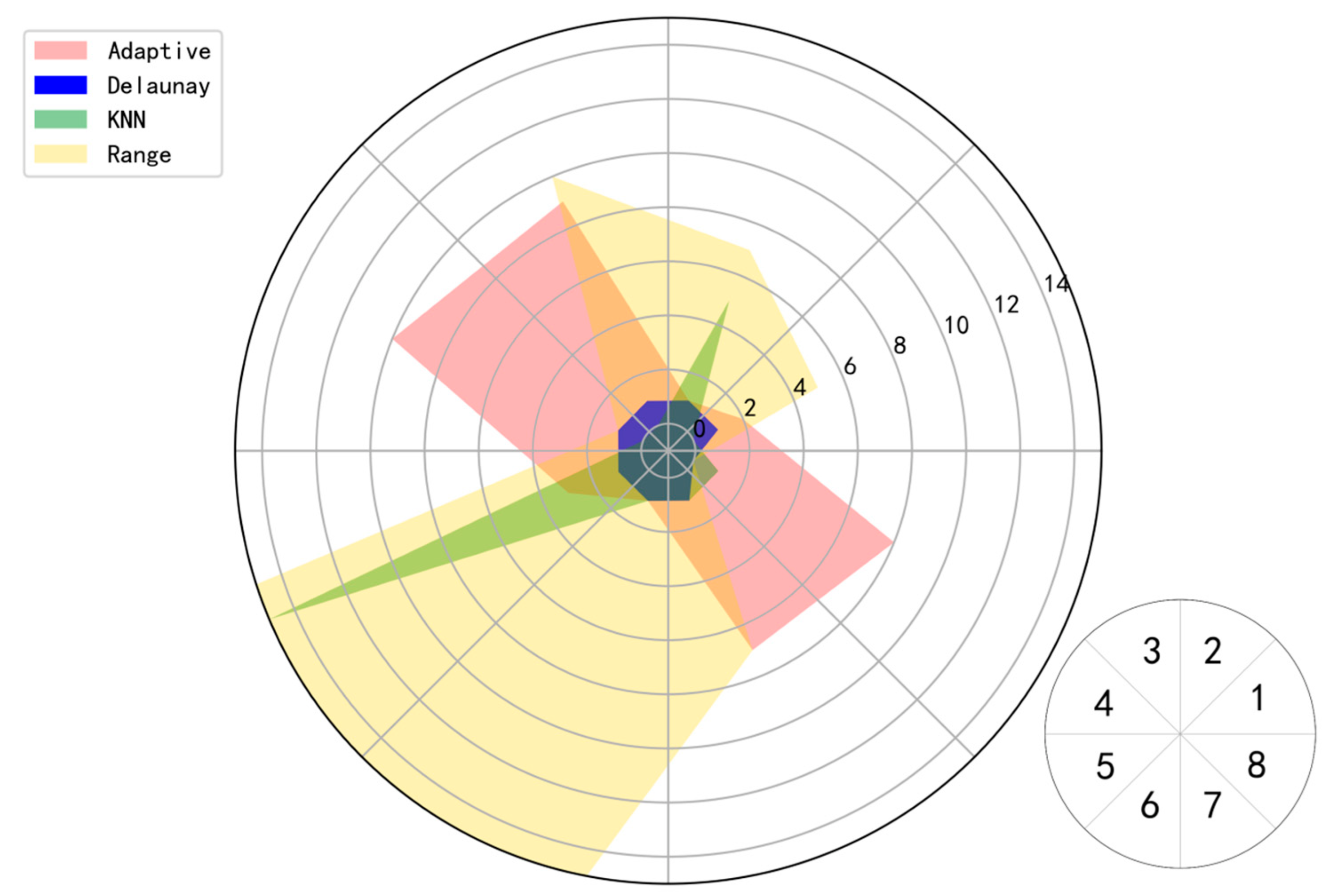
5.2.1. Single Point Analysis
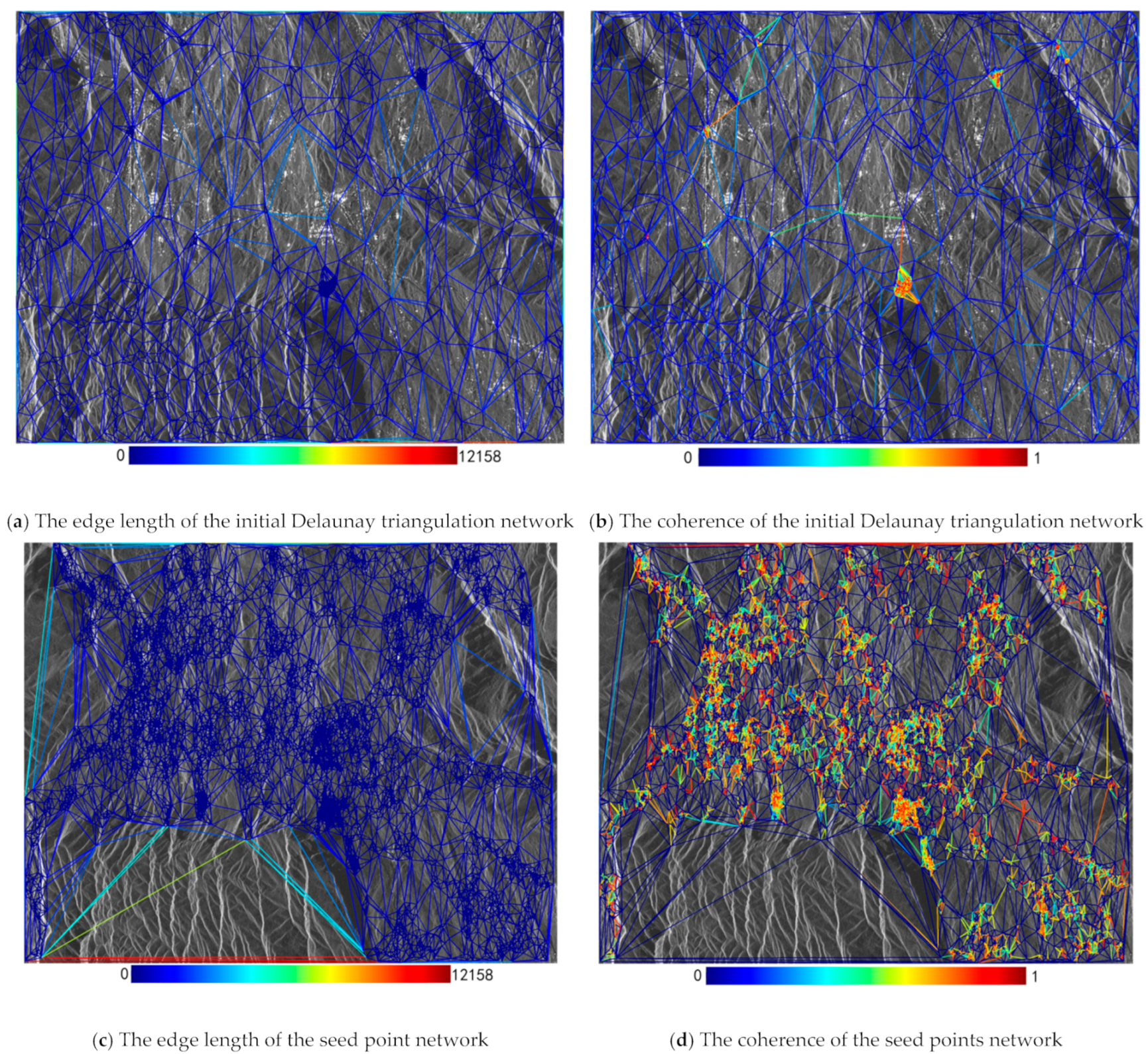
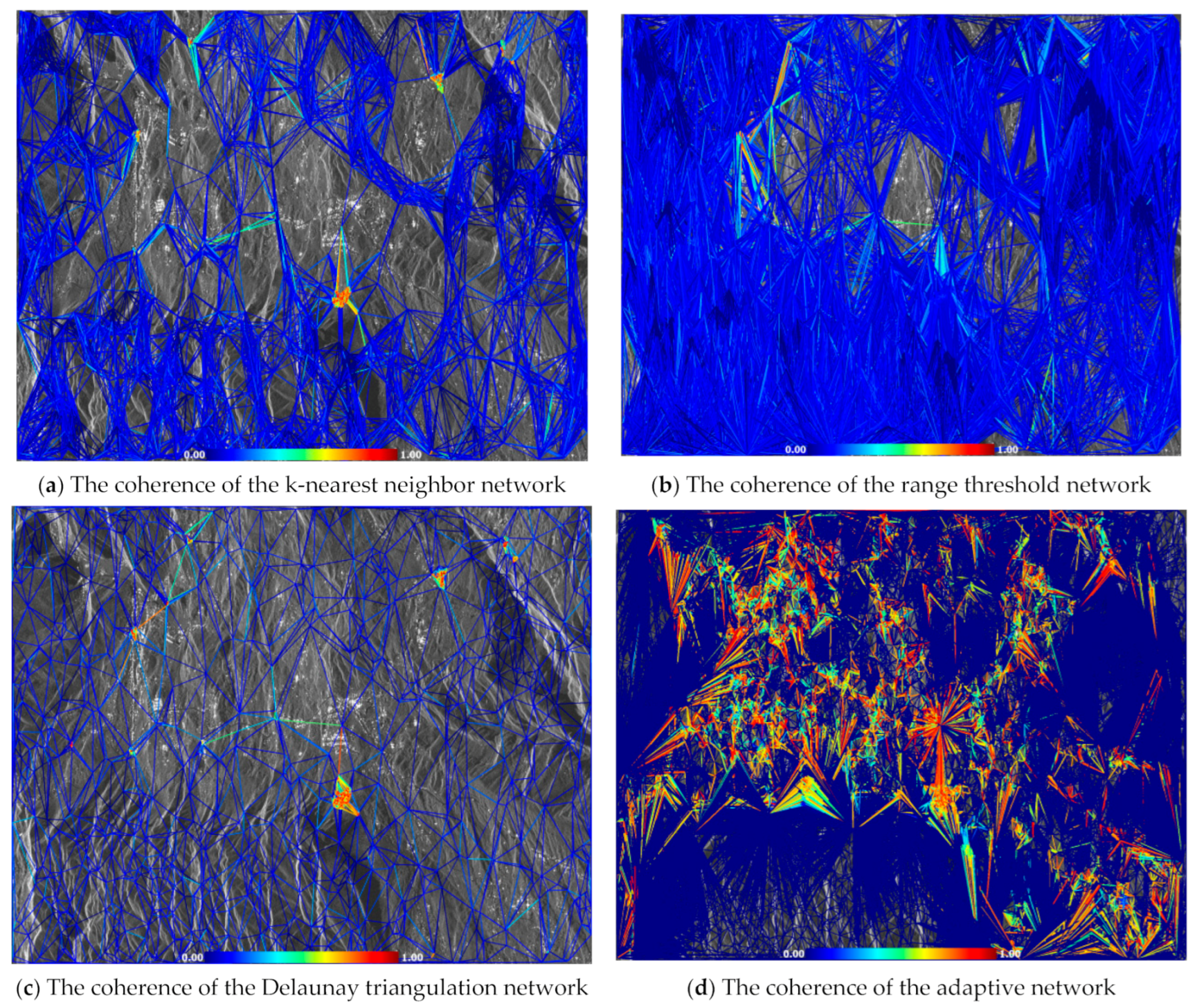
5.2.2. Initial Network Coherence and Edge Length
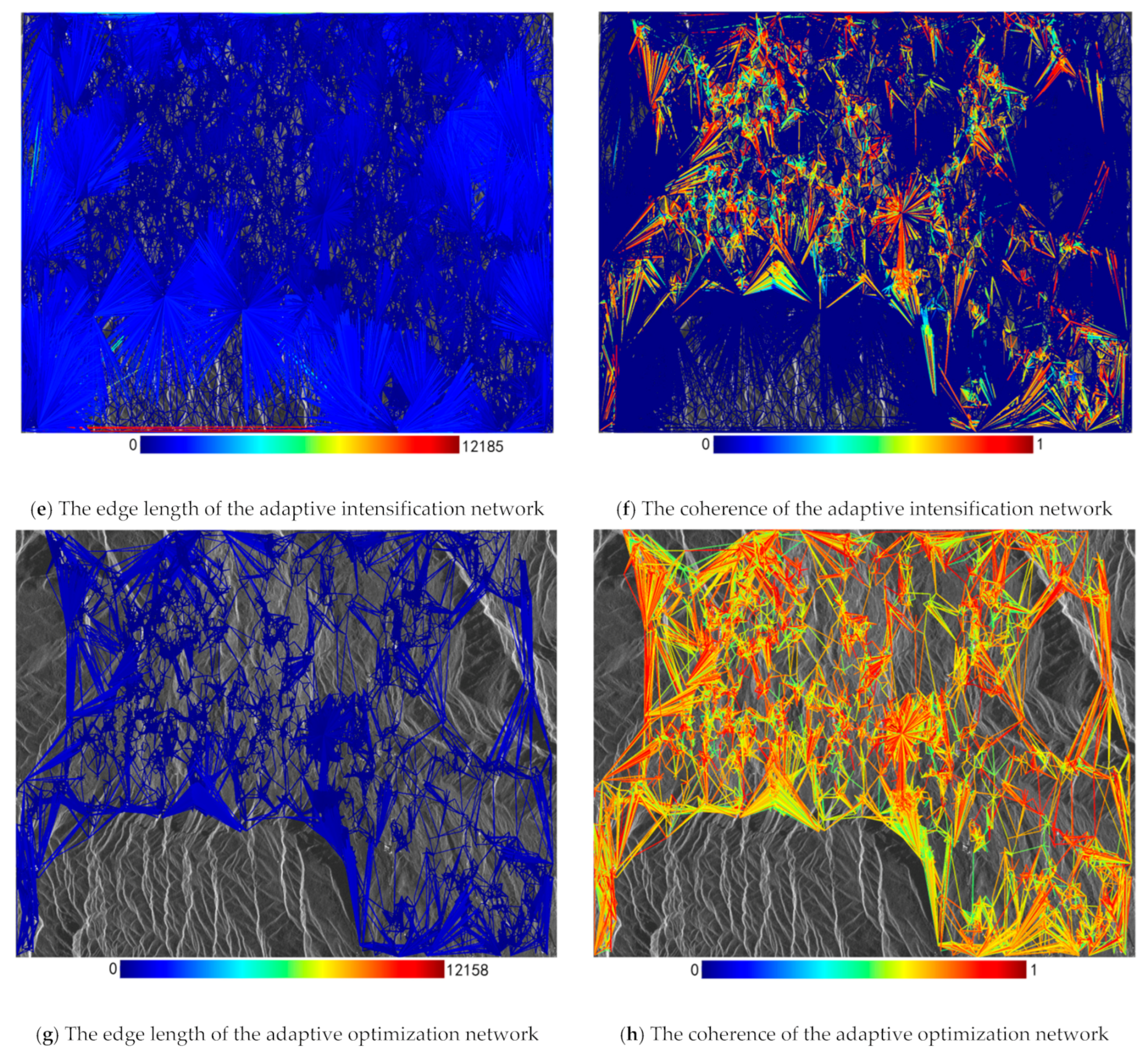
5.2.3. Skeleton Network Coherence and Edge Length
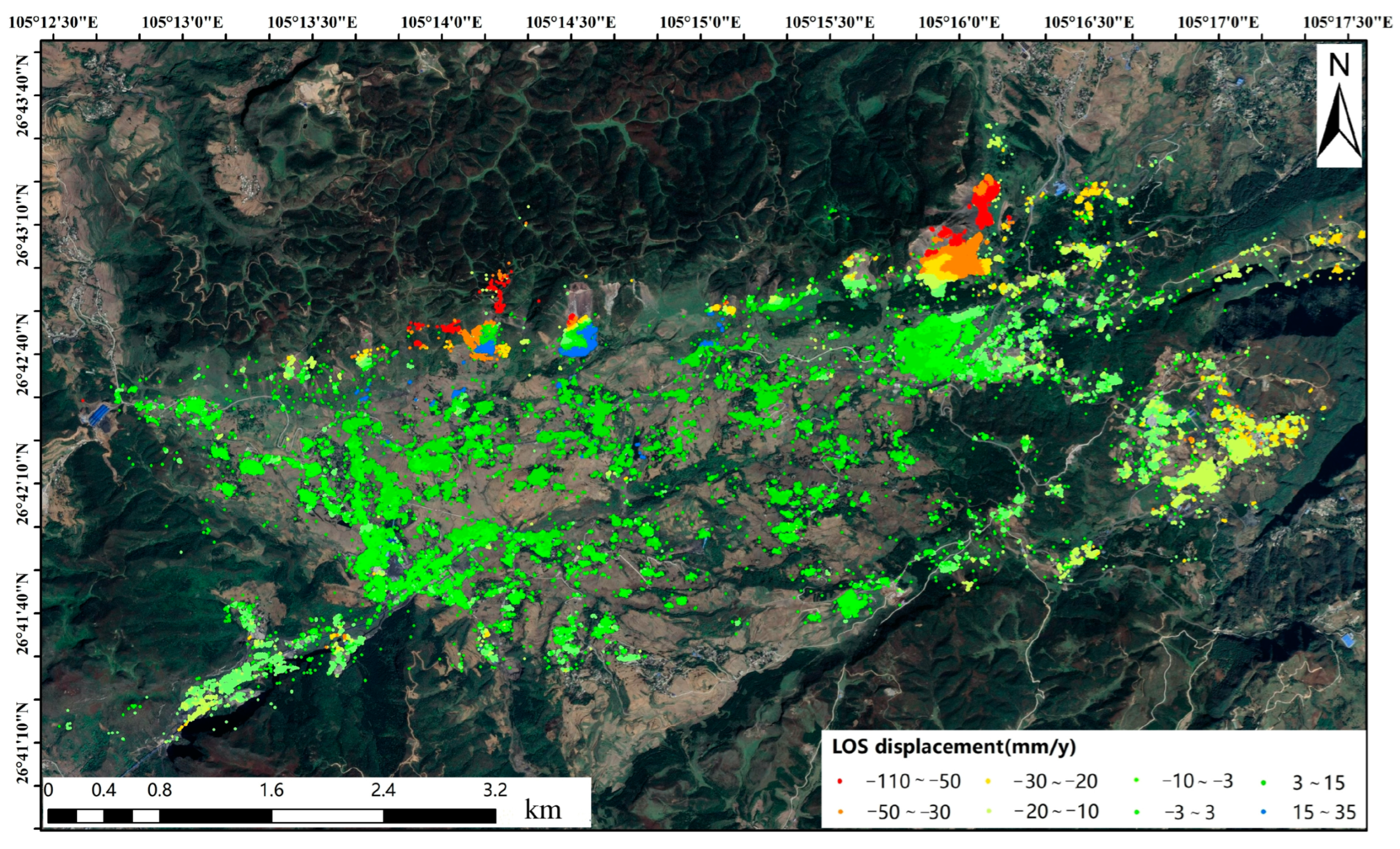
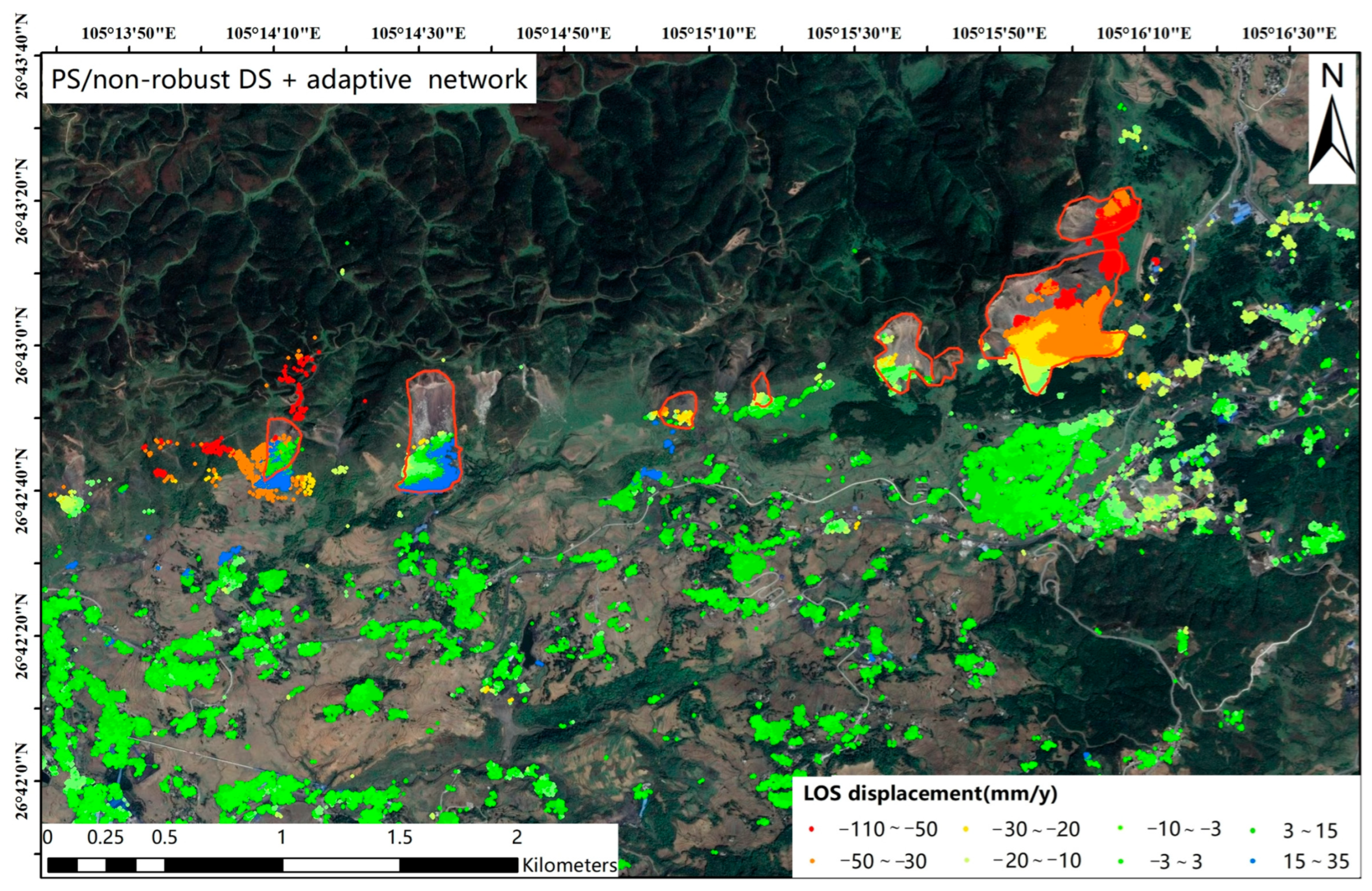
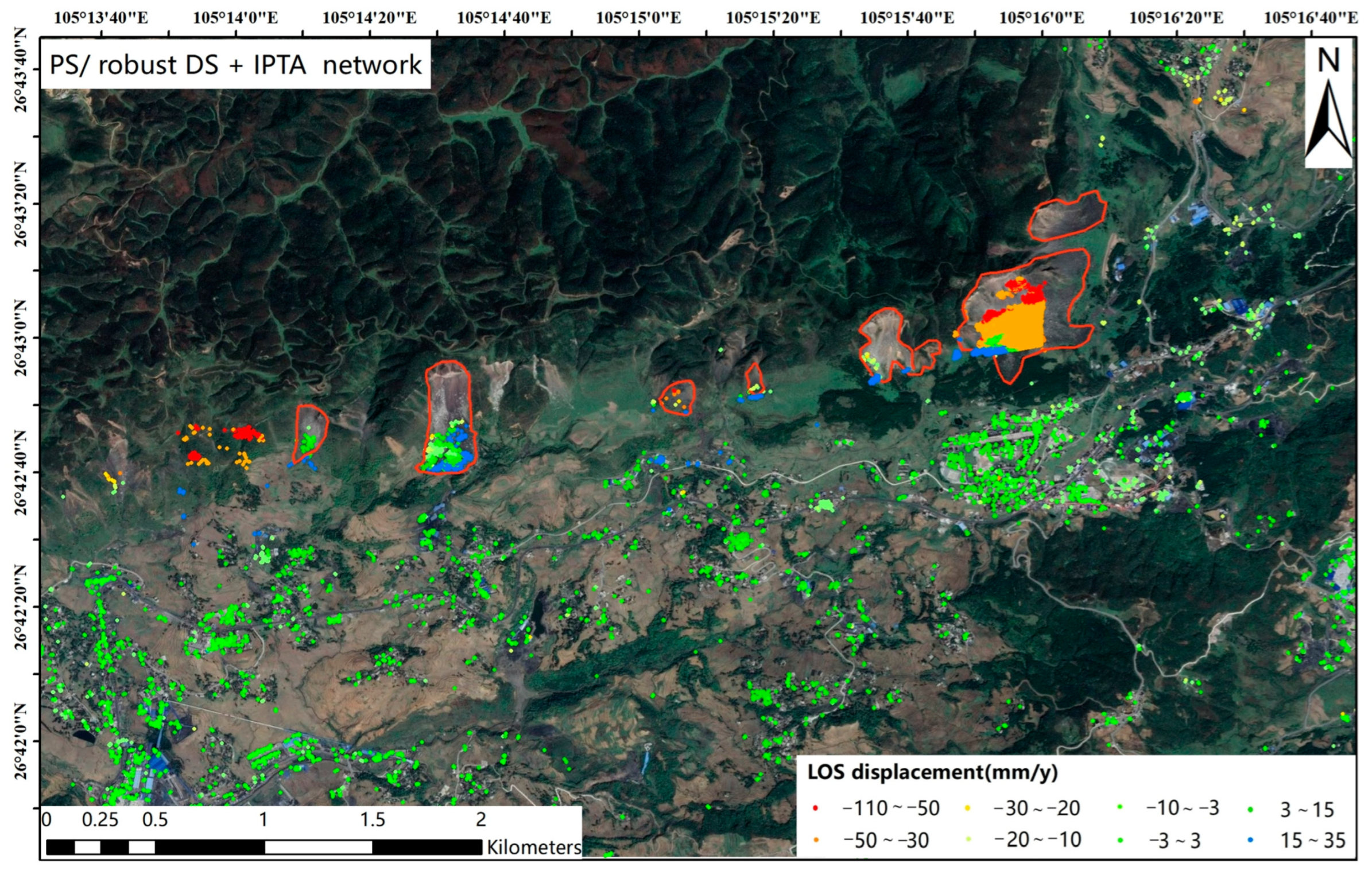
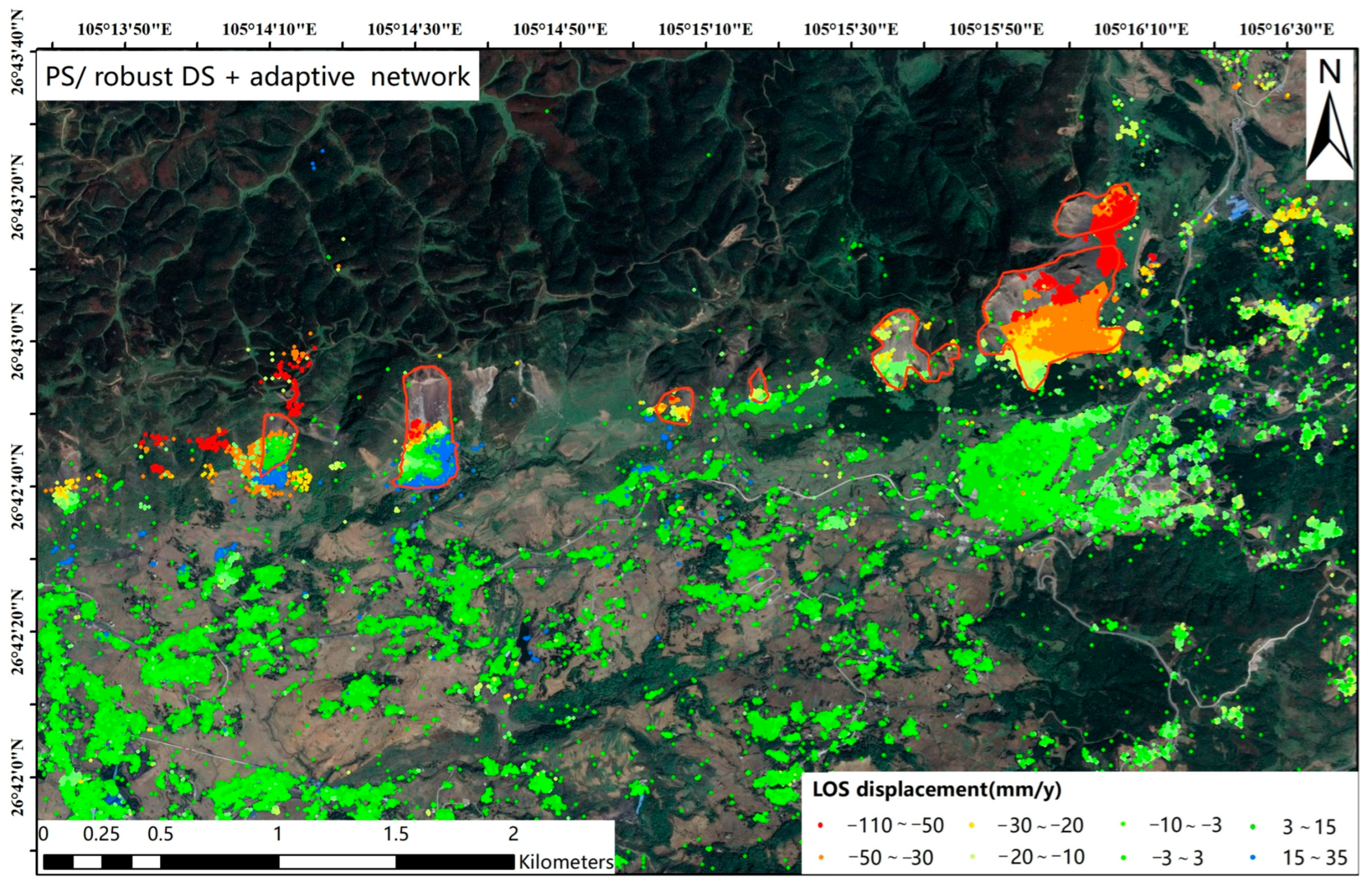
5.3. Final Result of Zongling Landslide Group
6. Conclusions
7. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Esmaeili, M.; Motagh, M. Improved Persistent Scatterer analysis using Amplitude Dispersion Index optimization of dual polarimetry data. ISPRS J. Photogramm. Remote Sens. 2016, 117, 108–114. [Google Scholar] [CrossRef]
- Colesanti, C.; Ferretti, A.; Novali, F.; Prati, C.; Rocca, F. Sar monitoring of progressive and seasonal ground deformation using the permanent scatterers technique. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1685–1701. [Google Scholar] [CrossRef] [Green Version]
- Crosetto, M.; Biescas, E.; Duro, J.; Closa, J.; Arnaud, A. Generation of Advanced ERS and Envisat Interferometric SAR Products Using the Stable Point Network Technique. Photogramm. Eng. Remote Sens. 2008, 74, 443–450. [Google Scholar] [CrossRef]
- Ferretti, A.; Prati, C.; Rocca, F. Nonlinear Subsidence Rate Estimation Using permanent scatterers in differential SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2202–2212. [Google Scholar] [CrossRef] [Green Version]
- Ferretti, A.; Prati, C.; Rocca, F. Permanent scatterers in SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2001, 39, 8–20. [Google Scholar] [CrossRef]
- Hooper, A.; Segall, P.; Zebker, H. Persistent scatterer interferometric synthetic aperture radar for crustal deformation analysis, with application to Volcán Alcedo, Galápagos. J. Geophys. Res. 2006, 112, B07407. [Google Scholar] [CrossRef] [Green Version]
- Kampes, B.M.; Hanssen, R.F. Ambiguity resolution for permanent scatterer interferometry. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2446–2453. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Wang, C.; Xie, C.; Zhang, H.; Tang, Y.; Zhang, Z.; Shen, C. Monitoring of large-scale landslides in Zongling, Guizhou, China, with improved distributed scatterer interferometric SAR time series methods. Landslides 2020, 17, 1777–1795. [Google Scholar] [CrossRef]
- Costantini, M.; Falco, S.; Malvarosa, F.; Minati, F.; Trillo, F.; Vecchioli, F. Persistent Scatterer Pair Interferometry: Approach and Application to COSMO-SkyMed SAR Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 2869–2879. [Google Scholar] [CrossRef]
- Ferretti, A.; Fumagalli, A.; Novali, F.; Prati, C.; Rocca, F.; Rucci, A. A New Algorithm for Processing Interferometric Data-Stacks: SqueeSAR. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3460–3470. [Google Scholar] [CrossRef]
- Bamler, R.; Harti, P. Synthetic aperture radar interferometry. Inverse Probl. 1998, 14, 1–54. [Google Scholar] [CrossRef]
- Xue, F.; Lv, X.; Dou, F.; Yun, Y. A Review of Time-Series Interferometric SAR Techniques: A Tutorial for Surface Deformation Analysis. IEEE Geosci. Remote Sens. Mag. 2020, 8, 22–42. [Google Scholar] [CrossRef]
- Berardino, P.; Fornaro, G.; Lanari, R.; Sansosti, E. A New Algorithm for Surface Deformation Monitoring Based on Small Baseline Differential SAR Interferograms. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2375–2383. [Google Scholar] [CrossRef] [Green Version]
- Hooper, A.; Zebker, H.; Segall, P.; Kampes, B. A new method for measuring deformation on volcanoes and other natural terrains using InSAR persistent scatterers. Geophys. Res. Lett. 2004, 31, L23611. [Google Scholar] [CrossRef]
- Zhang, L.; Ding, X.; Lu, Z. Ground settlement monitoring based on temporarily coherent points between two SAR acquisitions. ISPRS J. Photogramm. Remote Sens. 2011, 66, 146–152. [Google Scholar] [CrossRef]
- Perissin, D.; Teng, W. Repeat-Pass SAR Interferometry With Partially Coherent Targets. IEEE Trans. Geosci. Remote Sens. 2011, 50, 271–280. [Google Scholar] [CrossRef]
- Wang, Y.; Zhu, X.X.; Bamler, R. Retrieval of phase history parameters from distributed scatterers in urban areas using very high resolution SAR data. ISPRS J. Photogramm. Remote Sens. 2012, 73, 89–99. [Google Scholar] [CrossRef] [Green Version]
- Stephens, M.A. Use of the Kolmogorov–Smirnov, Cramér–Von Mises and related statistics without extensive tables. J. R. Stat. Soc. Ser. B Methodol. 1970, 32, 115–122. [Google Scholar] [CrossRef]
- Cao, N.; Lee, H.; Jung, H.C. A Phase-Decomposition-Based PSInSAR Processing Method. IEEE Trans. Geosci. Remote Sens. 2015, 54, 1074–1090. [Google Scholar] [CrossRef]
- Schmitt, M.; Schönberger, J.L.; Stilla, U. Adaptive Covariance Matrix Estimation for Multi-Baseline InSAR Data Stacks. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6807–6817. [Google Scholar] [CrossRef]
- Delaunay, B. Sur la sphere vide. Bull. Acad. Sci. USSR 1934, 793–800. (In French) [Google Scholar]
- Mora, O.; Mallorqui, J.J.; Broquetas, A. Linear and nonlinear terrain deformation maps from a reduced set of interferometric sar images. IEEE Trans. Geosci. Remote Sens. 2003, 41, 2243–2253. [Google Scholar] [CrossRef]
- Costantini, M.; Falco, S.; Malvarosa, F.; Minati, F. A new method for identification and analysis of persistent scatterers in series of SAR images. In Proceedings of the IGARSS 2008—2008 IEEE International Geoscience and Remote Sensing Symposium, Boston, MA, USA, 8–11 July 2008; pp. 449–452. [Google Scholar] [CrossRef]
- Costantini, M.; Malvarosa, F.; Minati, F. A General Formulation for Redundant Integration of Finite Differences and Phase Unwrapping on a Sparse Multidimensional Domain. IEEE Trans. Geosci. Remote Sens. 2011, 50, 758–768. [Google Scholar] [CrossRef]
- Ma, P.; Liu, Y.; Wang, W.; Lin, H. Optimization of PSInSAR networks with application to TomoSAR for full detection of single and double persistent scatterers. Remote Sens. Lett. 2019, 10, 717–725. [Google Scholar] [CrossRef]
- Ma, Z.-F.; Jiang, M.; Khoshmanesh, M.; Cheng, X. Time Series Phase Unwrapping Based on Graph Theory and Compressed Sensing. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5204412. [Google Scholar] [CrossRef]
- Yang, X.Z.; Xue, L.G. Characteristics of Maoshi Tourism Natural Resources and Classification of Scenic Spots in Zunyi. Guizhou Geol. 1994, 11, 6. [Google Scholar]
- Wang, S.-J.; Liu, Q.-M.; Zhang, D.-F. Karst rocky desertification in southwestern China: Geomorphology, landuse, impact and rehabilitation. Land Degrad. Dev. 2004, 15, 115–121. [Google Scholar] [CrossRef]
- Yin, Y.; Sun, P.; Zhu, J.; Yang, S. Research on catastrophic rock avalanche at Guanling, Guizhou, China. Landslides 2011, 8, 517–525. [Google Scholar] [CrossRef]
- Xing, A.; Wang, G.; Li, B.; Jiang, Y.; Feng, Z.; Kamai, T. Long-runout mechanism and landsliding behaviour of large catastrophic landslide triggered by heavy rainfall in Guanling, Guizhou, China. Can. Geotech. J. 2005, 52, 971–981. [Google Scholar] [CrossRef]
- Xing, A.; Xu, Q.; Zhu, Y.; Zhu, J.; Jiang, Y. The August 27, 2014, rock avalanche and related impulse water waves in Fuquan, Guizhou, China. Landslides 2016, 13, 411–422. [Google Scholar] [CrossRef]
- Fan, X.; Xu, Q.; Scaringi, G.; Zheng, G.; Huang, R.; Dai, L.; Ju, Y. The “long” runout rock avalanche in Pusa, China, on August 28, 2017: A preliminary report. Landslides 2019, 16, 139–154. [Google Scholar] [CrossRef]
- Zhu, Y.; Xu, S.; Zhuang, Y.; Dai, X.; Lv, G.; Xing, A. Characteristics and runout behaviour of the disastrous 28 August 2017 rock avalanche in Nayong, Guizhou, China. Eng. Geol. 2019, 259, 105154. [Google Scholar] [CrossRef]
- Ollila, E.; Koivunen, V. Influence functions for array covariance matrix estimators. In Proceedings of the 2003 IEEE Workshop on Statistical Signal Processing, St. Louis, MO, USA, 28 September–1 October 2004; pp. 462–465. [Google Scholar] [CrossRef]
- Zoubir, A.M.; Koivunen, V.; Chakhchoukh, Y.; Muma, M. Robust Estimation in Signal Processing: A Tutorial-Style Treatment of Fundamental Concepts. IEEE Signal Process. Mag. 2012, 29, 61–80. [Google Scholar] [CrossRef]
- Tan, W.Y. On the complex analogue of Bayesian estimation of a multivariate regression model. Ann. Inst. Stat. Math. 1973, 25, 135–152. [Google Scholar] [CrossRef]
- Kotz, S.; Nadarajah, S. Multivariate T-Distributions and Their Applications; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Ollila, E.; Croux, C.; Oja, H. Influence function and asymptotic efficiency of the affine equivariant rank covariance matrix. Stat. Sin. 2002, 14, 297–316. [Google Scholar]
- Visuri, S.; Koivunen, V.; Oja, H. Sign and rank covariance matrices. J. Stat. Plan. Inference 2000, 91, 557–575. [Google Scholar] [CrossRef]
- Werner, C.; Wegmuller, U.; Strozzi, T.; Wiesmann, A. Interferometric point target analysis for deformation mapping. In Proceedings of the IGARSS 2003 IEEE International Geoscience and Remote Sensing Symposium, Toulouse, France, 21–25 July 2003; pp. 4362–4364. [Google Scholar] [CrossRef]
- Samiei-Esfahany, S.; Martins, J.E.; van Leijen, F.; Hanssen, R.F. Phase Estimation for Distributed Scatterers in InSAR Stacks Using Integer Least Squares Estimation. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5671–5687. [Google Scholar] [CrossRef] [Green Version]
- Parizzi, A.; Brci, R. Adaptive InSAR Stack Multilooking Exploiting Amplitude Statistics: A Comparison Between Different Techniques and Practical Results. IEEE Geosci. Remote Sens. Lett. 2011, 8, 441–445. [Google Scholar] [CrossRef] [Green Version]
- Goel, K.; Adam, N. A Distributed Scatterer Interferometry Approach for Precision Monitoring of Known Surface Deformation Phenomena. IEEE Trans. Geosci. Remote Sens. 2013, 52, 5454–5468. [Google Scholar] [CrossRef]
- Li, Z.; Zou, W.; Ding, X.; Chen, Y.; Liu, G. A Quantitative Measure for the Quality of INSAR Interferograms Based on Phase Differences. Photogramm. Eng. Remote Sens. 2004, 70, 1131–1137. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| k-Nearest Neighbor Network | Range Threshold Network | Delaunay Triangulation Network | Adaptive Network | |
|---|---|---|---|---|
| average coherence | 0.492 | 0.503 | 0.451 | 0.614 |
| average edge length | 1008.72 | 325.073 | 999.63 | 74.946 |
| number of edges | 25,461 | 323,341 | 6043 | 367,652 |
| spatial distribution of highly coherent edges | non-uniform | non-uniform | non-uniform | uniform |
| k-Nearest Neighbor Network | Range Threshold Network | Delaunay Triangulation Network | Adaptive Network | |
|---|---|---|---|---|
| edges number of the initial network | 25,461 | 323,341 | 6043 | 367,652 |
| edges number of skeleton network | 11,505 | 191,814 | 2873 | 214,113 |
| utilization of edges | 0.45 | 0.59 | 0.47 | 0.58 |
| spatial connectivity of highly coherent edges | disconnected | disconnected | disconnected | connected |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Y.; Tian, B.; Xie, C.; Guo, Y.; Fang, H.; Yang, Y.; Wang, Q.; Zhang, M.; Shen, C.; Wei, R. Multi-Temporal InSAR Deformation Monitoring Zongling Landslide Group in Guizhou Province Based on the Adaptive Network Method. Sustainability 2023, 15, 894. https://doi.org/10.3390/su15020894
Zhu Y, Tian B, Xie C, Guo Y, Fang H, Yang Y, Wang Q, Zhang M, Shen C, Wei R. Multi-Temporal InSAR Deformation Monitoring Zongling Landslide Group in Guizhou Province Based on the Adaptive Network Method. Sustainability. 2023; 15(2):894. https://doi.org/10.3390/su15020894
Chicago/Turabian StyleZhu, Yu, Bangsen Tian, Chou Xie, Yihong Guo, Haoran Fang, Ying Yang, Qianqian Wang, Ming Zhang, Chaoyong Shen, and Ronghao Wei. 2023. "Multi-Temporal InSAR Deformation Monitoring Zongling Landslide Group in Guizhou Province Based on the Adaptive Network Method" Sustainability 15, no. 2: 894. https://doi.org/10.3390/su15020894