1. Introduction
The advancement of electric vehicles is driven by the ambition to reduce emissions to increase the consumption of fuels [
1]. In this situation of India and China, the shortage of energy is anticipated to happen rapidly because of a reduction in the future availability of fossil fuels and a 76% hike in necessity in the period from 2020 to 2045 [
2]. Carbon emissions and waste are decreased by employing renewable energy [
3]. Due to this, there is an increase in demand for clean, pollution-free renewable energy that emits only 30 carbon dioxides [
4]. Industry and researchers have utilized advanced PV modules for many purposes due to consecutive reductions in the price of PV panels and power electronics components [
5]. To maximize a PV array’s capacity, the MPPT approach with a DC-DC converter topology is commonly utilized [
6]. No carbon emissions are produced. Industry and researchers have utilized the advanced solar PV array for many applications because of continuous reductions of price in power electronics components and PV panels [
7]. The MPPT approach with DC-DC converters typically maximizes a PV array’s capacity [
8]. Various MPPT control techniques have been proposed, with fractional open/short-circuit control methods, incremental conductivity (INC), and perturbation and observation (P&O) being the most often used conventional techniques. These techniques result in a high turnout in a steady-state activity [
9]. These algorithms were verified to be not effective as when the weather is bad, conversion ratios are slow, and bigger variances prevent them from obtaining an overall maximum power point (MPP) in settings with partial shading conditions. To deal with these problems, MPPT with a bioinspired optimization algorithm has been proposed.
The artificial immune system (AIS) and the metaheuristic genetic algorithm (GA) were applied to overcome such nonlinear uncertain conditions because of the appropriate particular sensor and the complicated circuitry [
10]. However, immune cells have a huge population structure and adaptive machinery, which results in a poor conversion rate and a lengthy conversion time for AIS and GA algorithms [
11]. Crossover procedures are used in conjunction with computational convergence time to enhance the mutation. Many MPPT techniques with bioinspired optimization are implemented to challenge such difficulty [
12]. FSA is a fish life-inspired methodology designed to reduce grade point average assessment (GMPP) oscillations. Numerous control settings are needed for PSO’s random accelerating value choosing, and it may be a significant drawback. The bioinspired optimization techniques presently have more tracking efficiency, a high convergence rate, and low transients [
13]. Gray wolf (GW), ant colony (AC), glowworm optimization algorithm, and fish swarm algorithm (FSA) are a few examples. However, due to less bee availability and the weather being unpredictable, the poor conversion rate in ABC approaches [
14,
15].
Due to a shortfall of contingency and a heavy nest population, the cuckoo search algorithm is a more productive way for nonlinear-based issues, although its rate of melting is moderate. Due to this, several researchers have implemented this bioinspired approach based on photovoltaic system investigation. Considering the difficulty present in MPPT techniques, this paper proposed a novel MPPT control technique for MPA. It does not need hardware data from PV, as it can exactly and rapidly search to find the GMPP. This work object is to enhance the overall performance of PV-powered electric vehicles. In this technology, the BLDC motor is used in PV-powered e-vehicles. The MPA technique has been implemented to increase the complete performance of the system. The MPA technique features a faster convergence rate and a better method to locate GMPP. An observation of MPPT output has been illustrated to determine the effectiveness of the suggested approach in this framework.
For maximum power tracking from solar PV, making use of combined MPPT, different techniques were presented by scientists. In the following segment, the different MPPT approach for EVs driven by BLDC is surveyed, and it was designed for maximum power tracking.
The complete paper’s structure is provided below: The literature review is presented in
Section 2. the proposed work is explained in
Section 3.
Section 4 and
Section 5 give the control techniques which were used in the proposed work, followed by its results in
Section 6 and conclusion in
Section 7.
2. Literature Review
Himabindu et al. [
16] presented the partially solar-powered EV. The EV’s energy efficiency is greater than that of fuel-powered vehicles without taking electricity generation, transmission, and efficiency into account. Moreover, for a limited solar-powered EV, the unique prototype of a lightweight EV was elaborated on in this paper. The development of the unique energy-efficient prototype of EV and the possibility of a limited solar-based EV was discussed. Lakshmiprabha et al. [
17] presented the BLDC motor with a PV-based electric vehicle approach. The approach for developing the BLDC driven with PV-powered EV, which was a potential solution for the lake of impending, was explained in this work. The approaches to finding the right parts of this application were explored, and both of them were tested and simulated in a real-world application. The integrated system of the PV-powered EV features the BLDC motor, batteries, battery charger controller, solar module, and a DC-DC boost converter. Ahmad et al. [
18] demonstrated that the nature of the autoindustry was changing as a result of worries about oil supply, foreign relations, and fuel prices. There were numerous hybrid technologies available at the time, due to the availability of hydrogen. Among the oldest vehicles using alternative fuel, the vehicle integrated with solar power has several applications in the expanding EV market. The development of the solar-powered telemetry system for high-speed cars helps in improving the understanding of the vehicle’s power aspects and the operation implemented in EVs. This work inspected the position and history of electric vehicles and solar energy, in addition to a standard solar vehicle.
García et al. [
19] conferred on e-rickshaws driven by a BLDC motor a fuzzy logic controller (FLC)-based technique to develop ideal power management for regenerative braking. The FLC was adapted to control the separate power management for the battery and for the supercapacitor, to supply the output of the e-rickshaw driven by BLDC. E-rickshaw enhanced operating time by the solar-powered approach to boost the operation, and using simulated testing rickshaws was verified, which exposed the examination of the BLDC’s performance under several operating conditions. If the need for power increases suddenly in a temporary situation, the supercapacitor manages the complete need for power. The power ratio is divided to enable the battery to be deeply discharged, increasing battery life. Ho et al. [
20] explained the integration of electric power systems for the EV. The objective of this work was to introduce the theoretical arrangement to successfully integrate EVs into electric interconnected networks. The advanced structure was split into power market environments and the grid technical operations. Participants in both processes, as well as their actions, were all considered and fully explained. Moreover, various simulations, with the dynamic and analysis of steady-state behavior, were explained to make clear the impacts and benefits originating from the EVs and integration of the grid using the cited methodology. Oubelaid et al. [
21] demonstrated the controlling techniques for hybrid electric vehicles. Global optimization techniques and dynamic programming were mainly employed to evaluate the powertrain configuration’s prospective fuel efficiency. These control procedures cannot be applied directly until advanced driving conditions could be likely at the time of real-world application; even so, the results obtained with this noncausal method delivered the criteria for analyzing the best possible control technique that is attainable.
Lan et al. [
22] conferred the creation of the Japanese government’s EV policy. The scope of this work was to inspect the policy for the creation of alternative vehicles to traditional vehicles, the outcomes of government actions, and the requirement of a technological adaptability program supported by the government. The effects of this scheme on the methods of innovation were explored through the use of this viewpoint and technological literature improvement. The complete network with the assistance was investigated, further to the context in which this different policy has been used since the early 1970s. Saha et al. [
23] demonstrated for EVs with BLDC Motors that are electric, hybrid, and plug-in hybrid an effective regenerative braking system using battery/ultracapacitor. The ultracapacitor used a suitable inverter switching template for energy regeneration and/or regenerative braking to store the vehicle’s kinetic energy. Due to this, no extra power electronics interfaces were needed. Simultaneously, the EV’s front and back wheels received braking force from the artificial neural network controller, which is responsible for distributing it. To attain steady torque braking, additionally, the PI controller was used to vary the PWM operating cycle. Li et al. [
24] explained that the BLDC motors are controlled by a hybrid sliding-mode system without a position sensor (HSMC). This research gave effective and reliable control techniques for the position-sensorless EV using the BLDC motor. To adopt the BLDC motor sensorless control of the BLDC motor, the back EMF finding technique was initially implemented and enhanced. The corresponding circuits of regulating systems were presented, as well as the creation of energy regeneration and standard driving mathematical models. A technique for the EV HSMC approach was implemented to promise by integrating both the system effectiveness and using the high-order sliding-mode approach; the nonsingle terminal sliding mode has sustained stability.
Gupte et al. [
25] have conferred on transmission a selectively aligned surface (PMBLDC) for the HEV motor. A programmable and adjustable generated voltage constant in an axial-flux PMBLDCM was used to achieve the field weakening. This quality was exclusively suitable in motors for driving vehicles with vast ratios of constant-power speeds, where it was imperative to get rid of gear shifts and shrink the overall motor drive’s size. The advantages of this method’s high pole count were discussed, and the simulation’s impact on the kilovolt-ampere motor drive, acceleration, maximum speed, and efficiency was described over regular driving cycles. The e-vehicles with BLDC motors used in this system are energized using solar PV. The MPA technique is derived concerning enhancing the system’s total efficiency. For efficient MPP tracking from a PV array, scientists took help of the MPA technique.
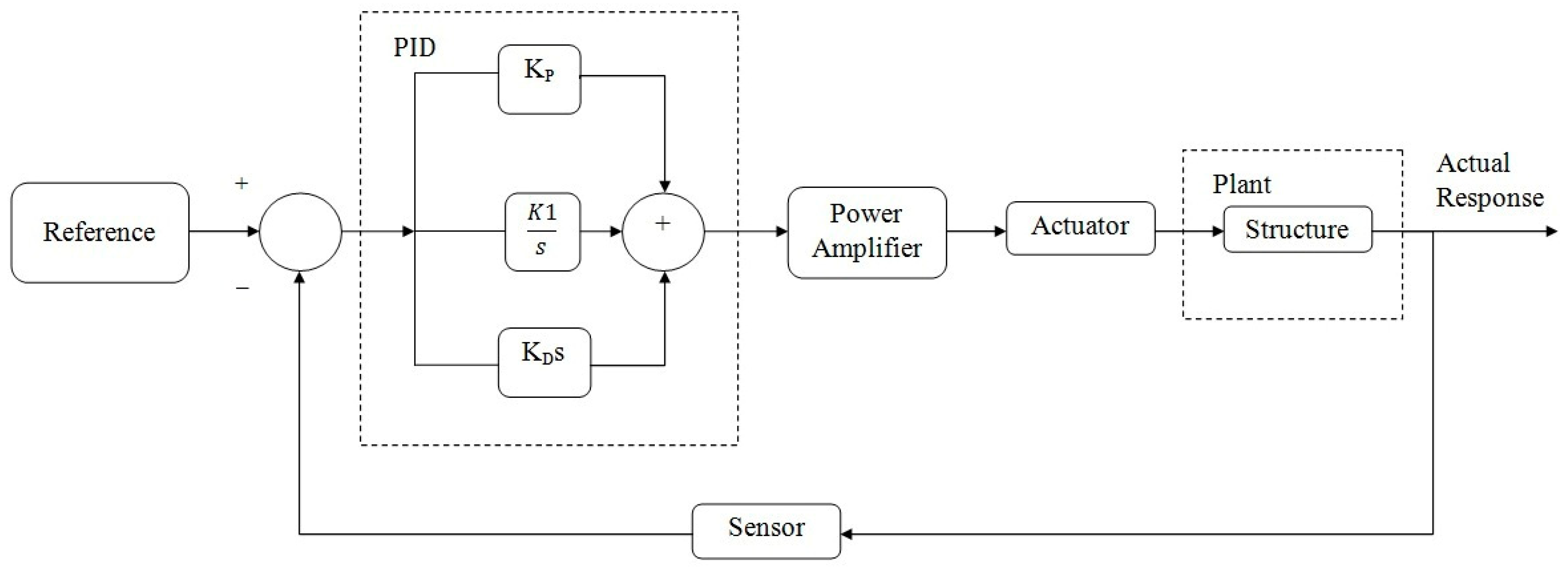
5. BLDC Motor Control Based on PID
PID consists of a set of conditions that could be applied to give a closed-loop control system precise regulation. In a closed-loop control process, the controlling device receives continuous real-time measurements of the process being controlled to ensure it reaches the desired range. The computed value, also known as the “process variable”, is made by the controlling device to resemble the indented value, also known as the “set point”. To complete the desired work effectively, the PID control algorithm is adapted. The most important of these is proportionate control, which measures the error value and creates proportionate changes to lower the error in the control variable. Proportional control is mostly used in many control systems. The PID controller continuously evaluates the difference between the process variable and the set point and makes the necessary corrections. Derivative control monitors the process variable’s rate of change and modifies the output variable to take unexpected changes into account.
Each of the three control functions is directed by a user-defined parameter. These characteristics may differ from one control system to another, and as a result, they must be modified for the best control precision. Finding the values of these parameters is known as PID tuning. Although many people think of PID tuning as “black magic”, it is always known as a precise mathematical process.
There are numerous ways to accomplish PID tuning, and any of the methods can be used to tune any system. While some PID controlling methods require more devices than others, they typically produce more accurate output with low effort. The fundamental objective of the PID controller is to execute algorithm-based tuning constants. The control engineer delivers the current plant process value and the operator’s intended operating value (set point). In most situations, the controller will conduct to bring the process value as close to the set point as is practical. To perform a simple process control loop, PID algorithms will be implemented by the control engineer.
PID Controlling
The main goal of the PID controller is to maintain the constant output level so that there is no difference (error) between the process variable (Pv) and the set point (SP). The valve may control the flow of gas to a heater, the water level of the tank, the temperature of a chiller, the flow through a pipe, the pressure of the pipe, or any other method for process control and shown in
Figure 11.
where,
X = total controller error,
ITAE*= absolute integral-time error.
= error signal between a reference voltage and load.
The MPA-based control method is implemented in the proposed work. It is explained in
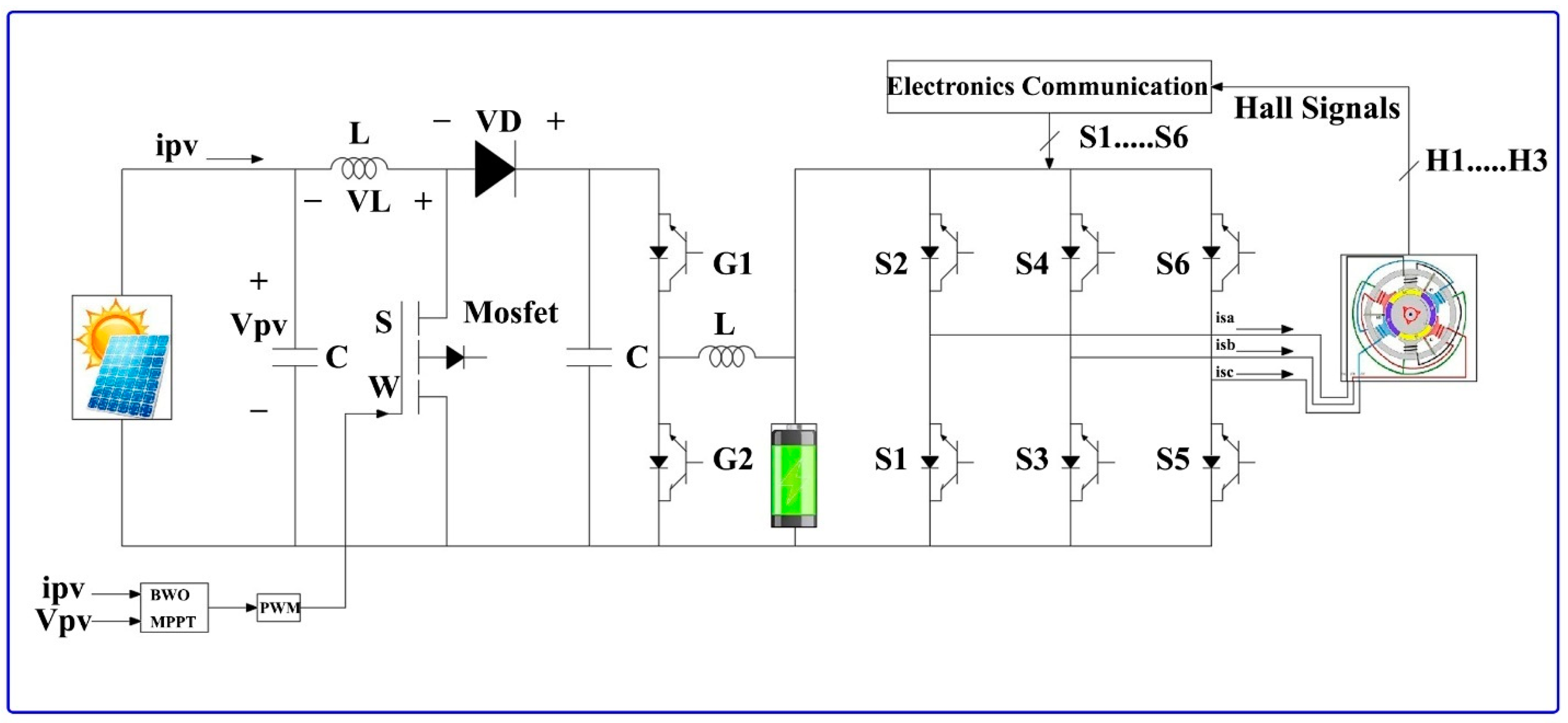
Section 4 and provides a detailed explanation of the PID approach utilized for BLDC motors with electronic commutation. It is the most common strategy for controlling the 3ϕ AC motor speed and torque by utilizing the current control method. When the BLDC motors are operated at both high and low speeds, at that time there is no precise speed control and ripple in torque. For applications such as washing machines, PID is very important. The VSI switching signals were produced by the motor’s “electronic commutation”. The Hall effect sensor is attached to the stator and is used to find the rotor position angle. These Hall effect signals are changed into six switching pulses, which are used to control the switches of the voltage source inverter.
6. Results and Discussion
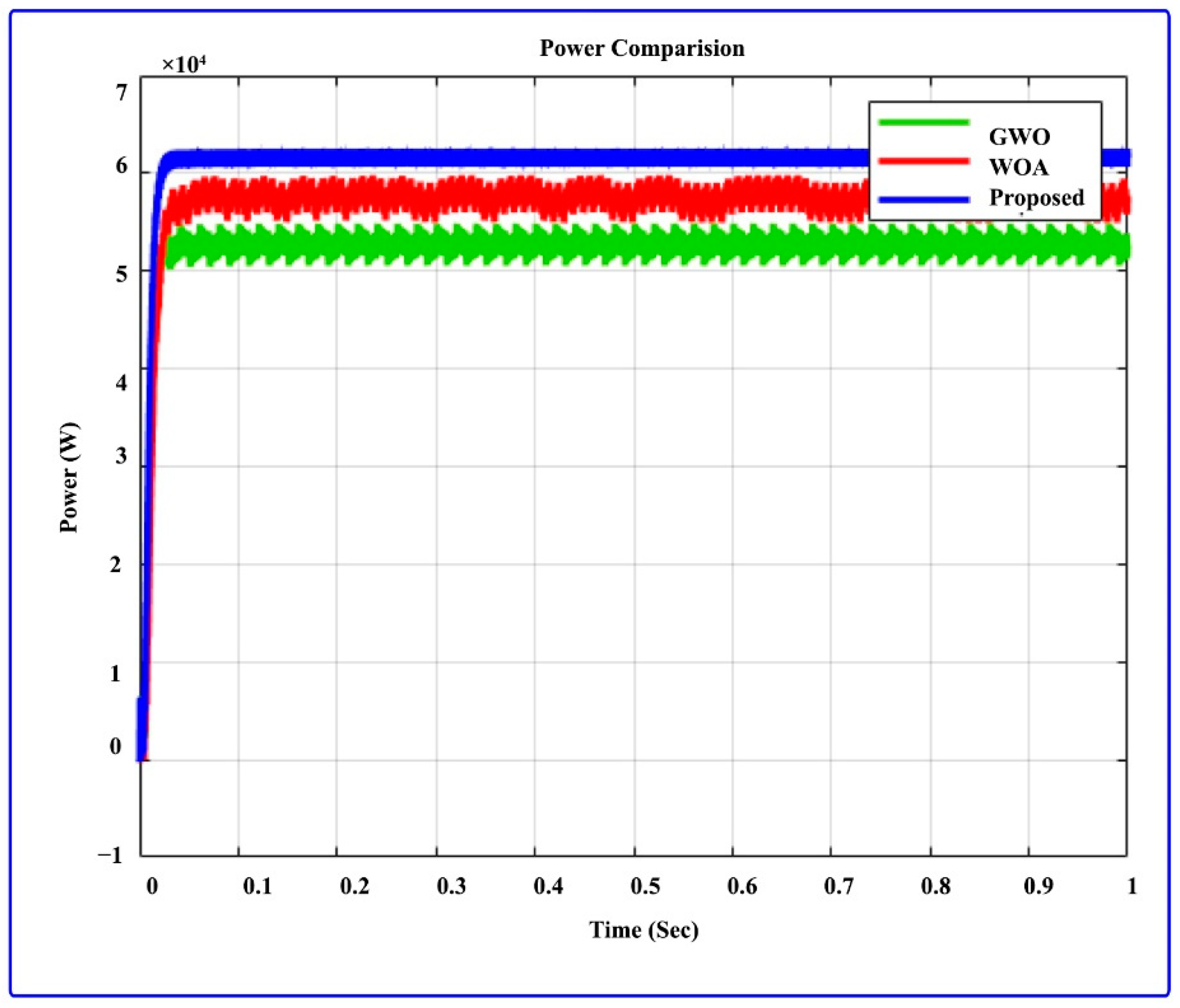
The solar PV panels used to generate the power of 500 W, in addition to power connecting the DC-DC converter, are included in the proposed work; it was made by using MATLAB/Simulink software. To charge a vehicle battery, the power extract from PV is used. In this configuration, we are powering a BLDC motor rating of 3000 rpm, 256 V, 1 kW, and a BLDC motor with a series batteries rating of 220 V, 90.4348 Ah. The current and voltage extract from the solar array is given as MPPT input, and the switch in the DC-DC converter is activated by PWM signal, enabling the implementation of the MPPT from the solar array. The proposed MPA-based MPPT control algorithm is correlated to the GWO and WOA MPPT control bioinspired algorithms to assess how well it performs.
The findings of this study are examined in four modes, which are described in the following section:
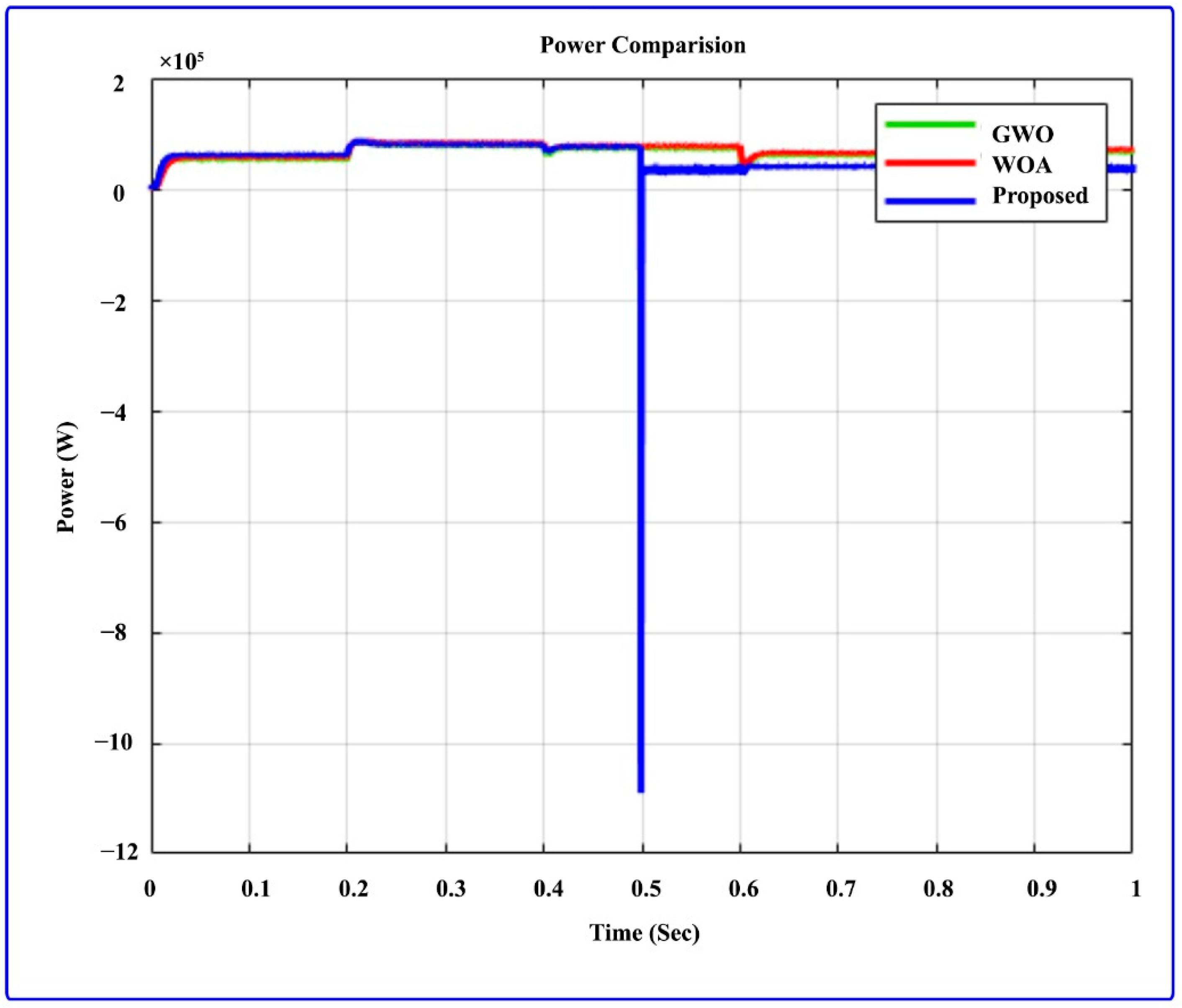
The MATLAB Simulink software is used to simulate the suggested work under 25 °C constant temperature and a constant irradiation of 1000 W/m
2, as shown in
Figure 12. Meanwhile the settling time is 0.06 s and 0.035 s for power through the GWO and WOA, respectively. This produces a high fluctuating signal. The output power through the MPA is settled in 0.02 s. In the first case, the PV panel temperature is 25 °C constant, and the PV irradiance is 1000 W/m
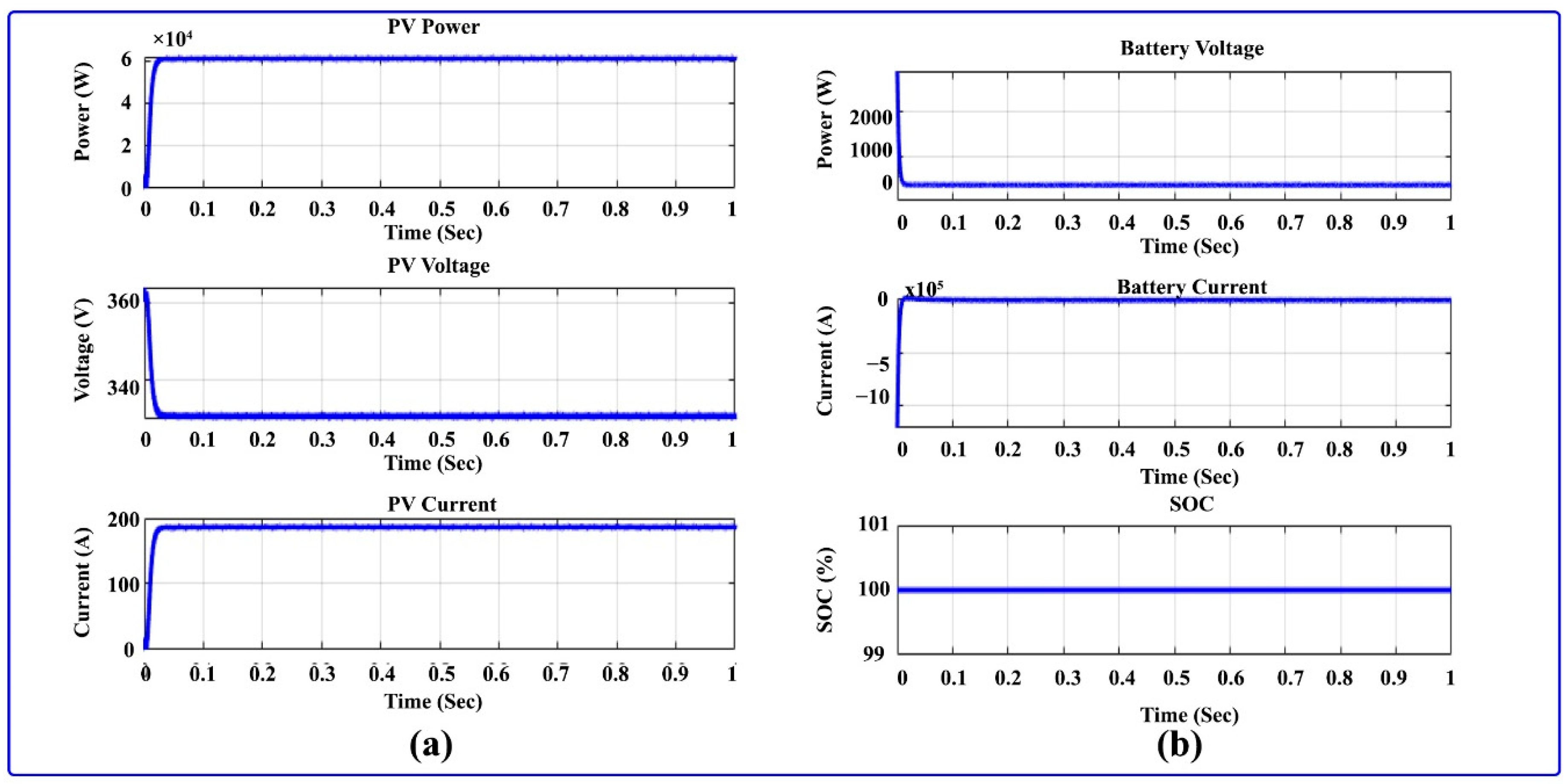
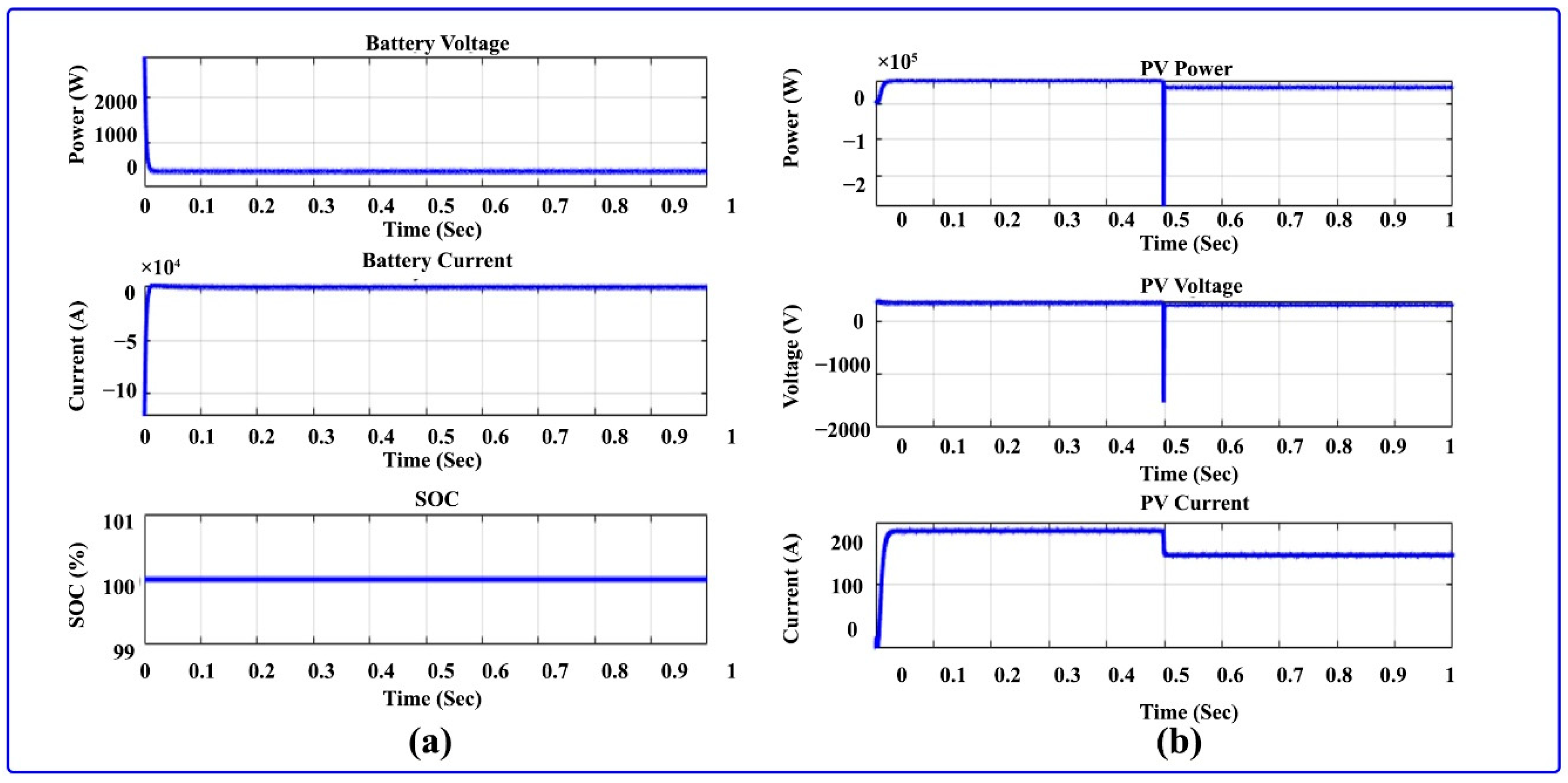
2. In affixing, the BLDC motor speed is set at 3000 rpm constant, and the battery voltage and PV power outputs are analyzed in
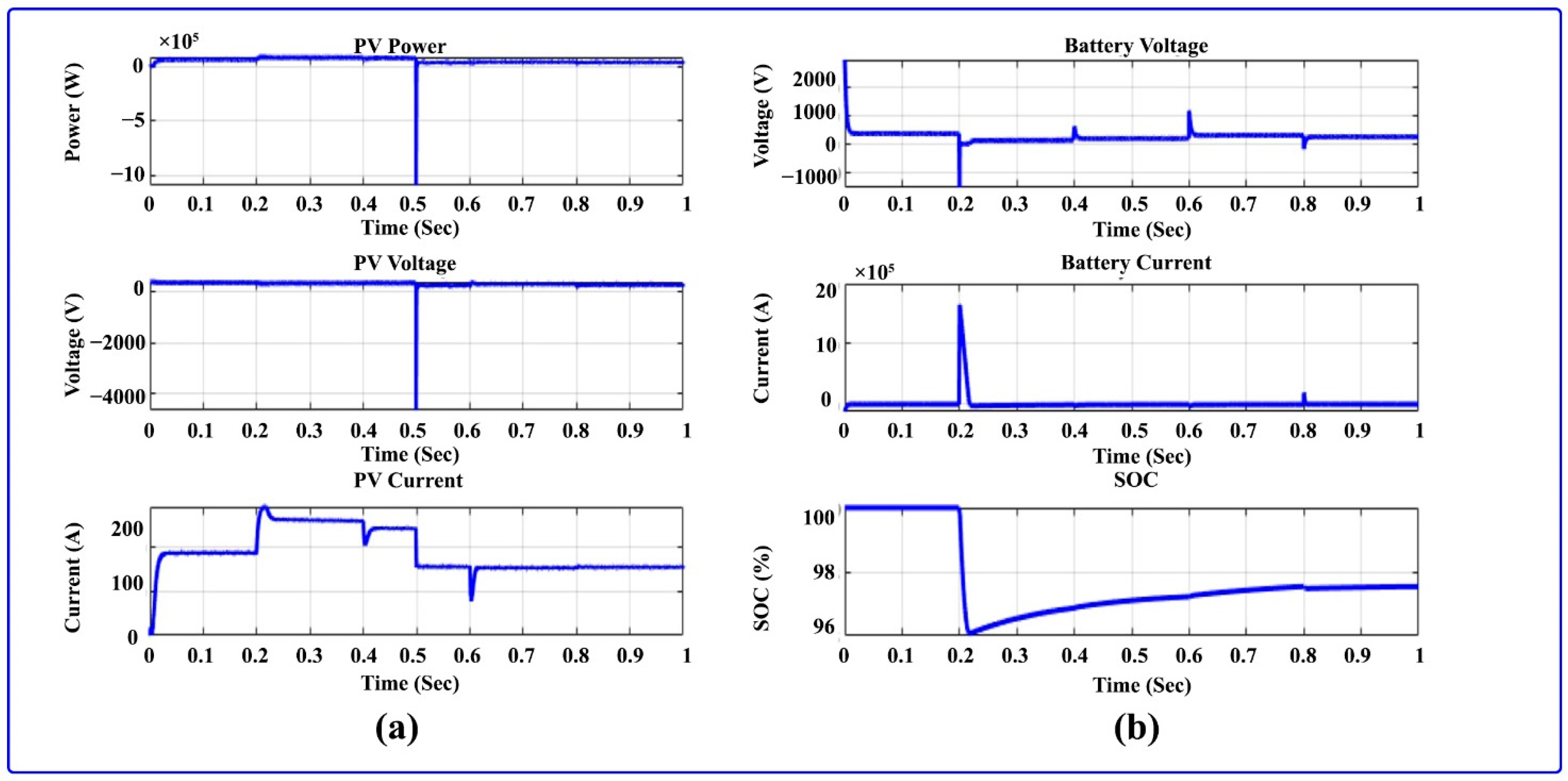
Figure 13. The PV current, PV voltage, and PV power are illustrated in
Figure 13; the solar PV power reaches 62 kW and settles in 0.02 s, and the PV current and voltage are obtained at 185 A and 340 V, respectively.
Figure 13 demonstrates the outputs of the battery, which are the current, SOC, and output voltage of the battery. The battery current and voltage are obtained at 480 A and 360 V, respectively, and battery SOC is reached at 100% in discharging mode.
7. BLDC Motor Outputs
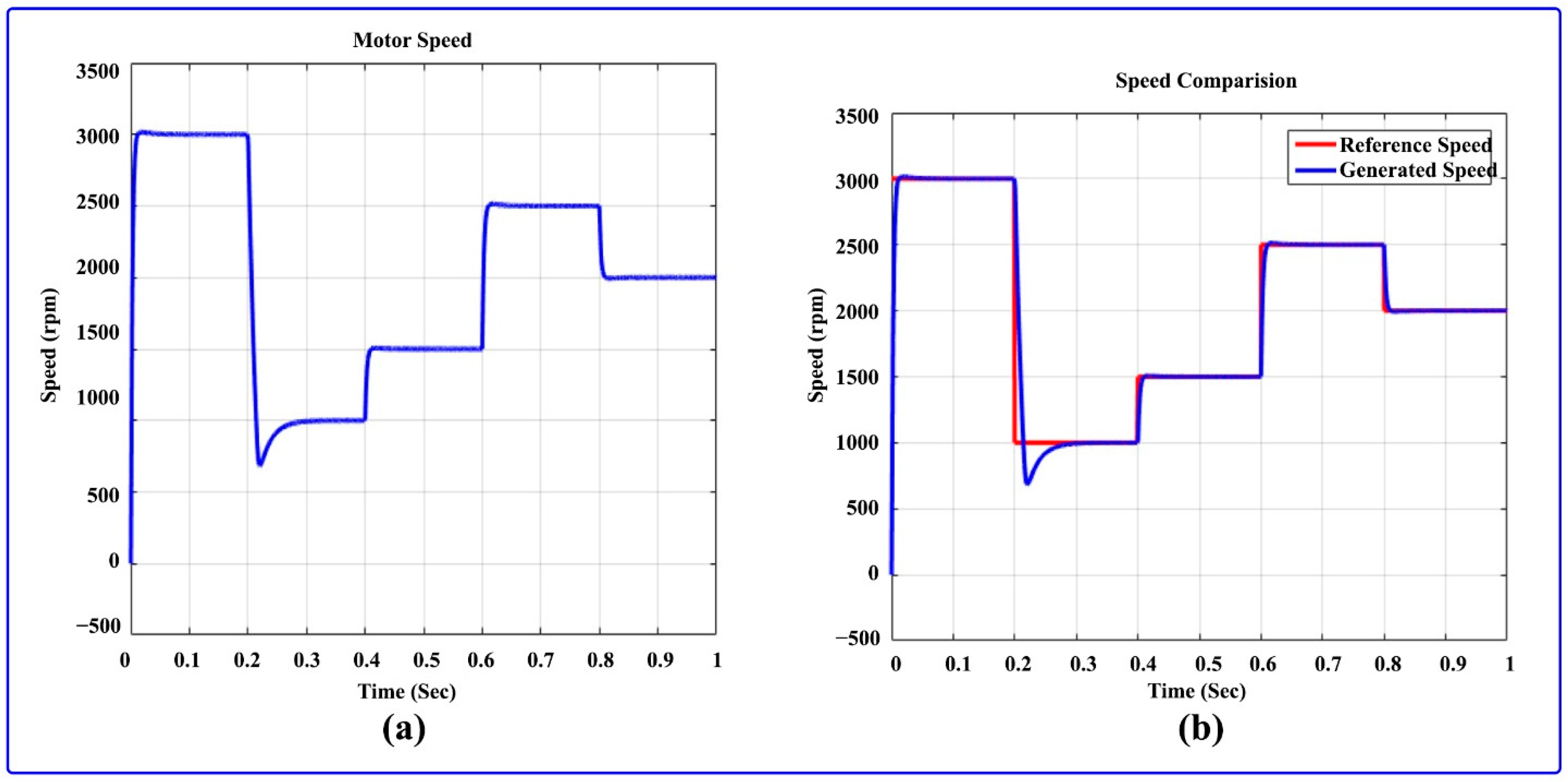
The BLDC motor output is illustrated in
Figure 14 and
Figure 15. Here,
Figure 14 shows the speed and the BLDC motor comparison. At first, 3000 rpm is set as a reference speed for one second.
Figure 14a illustrates the BLDC motor speed, which is set to a constant speed of 3000 rpm, and
Figure 14b demonstrates the speed and reference speed comparison.
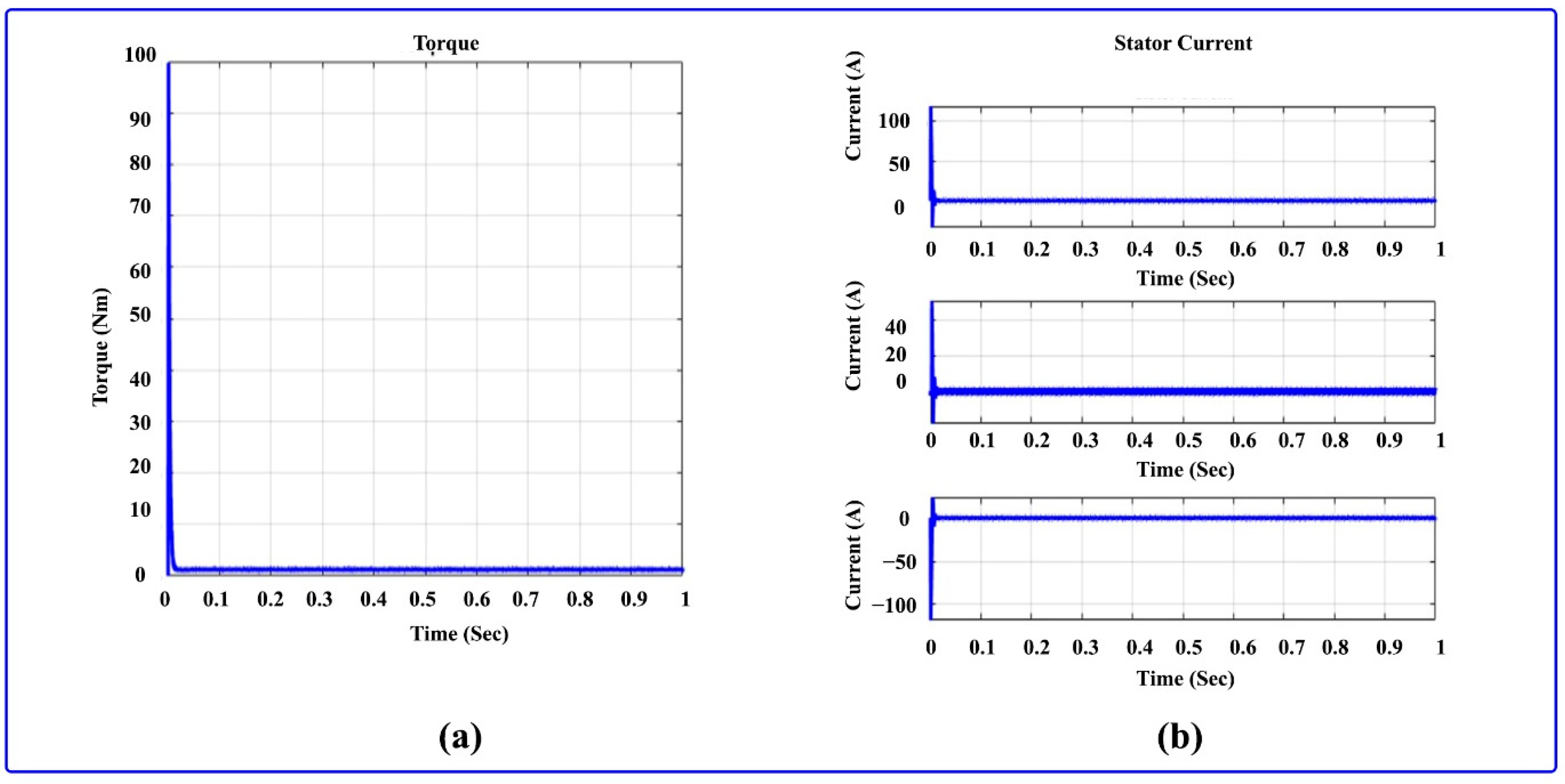
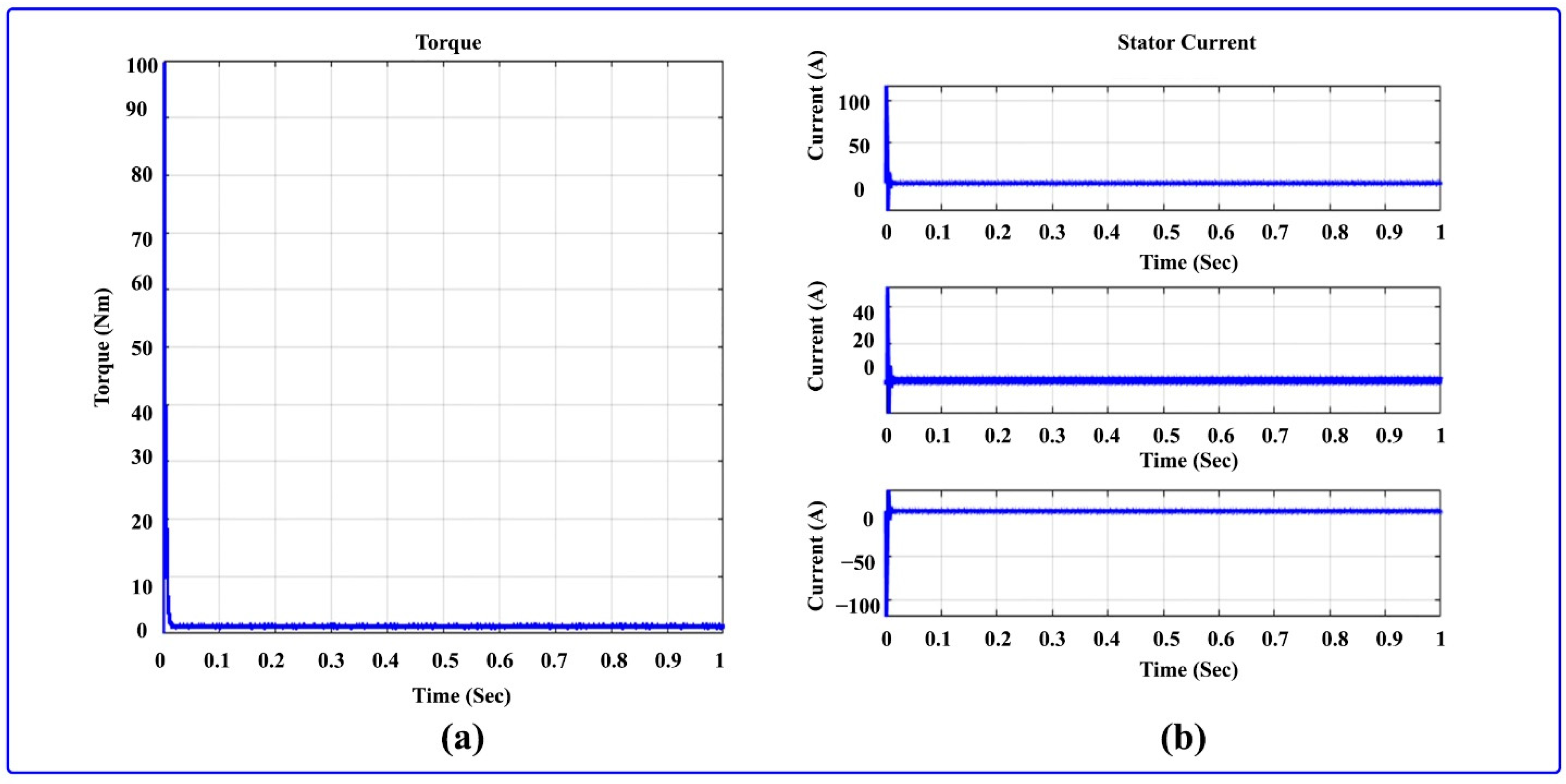
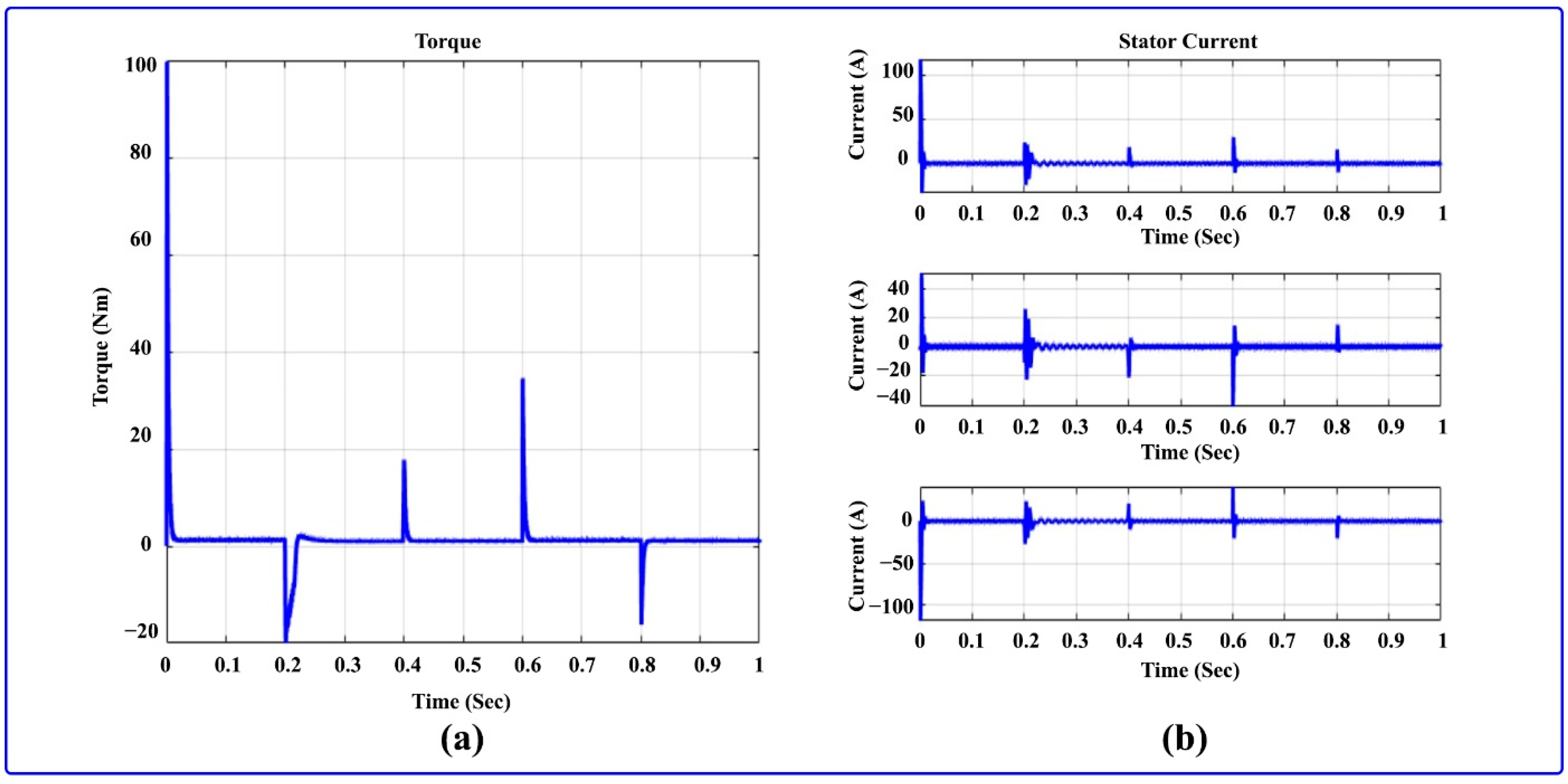
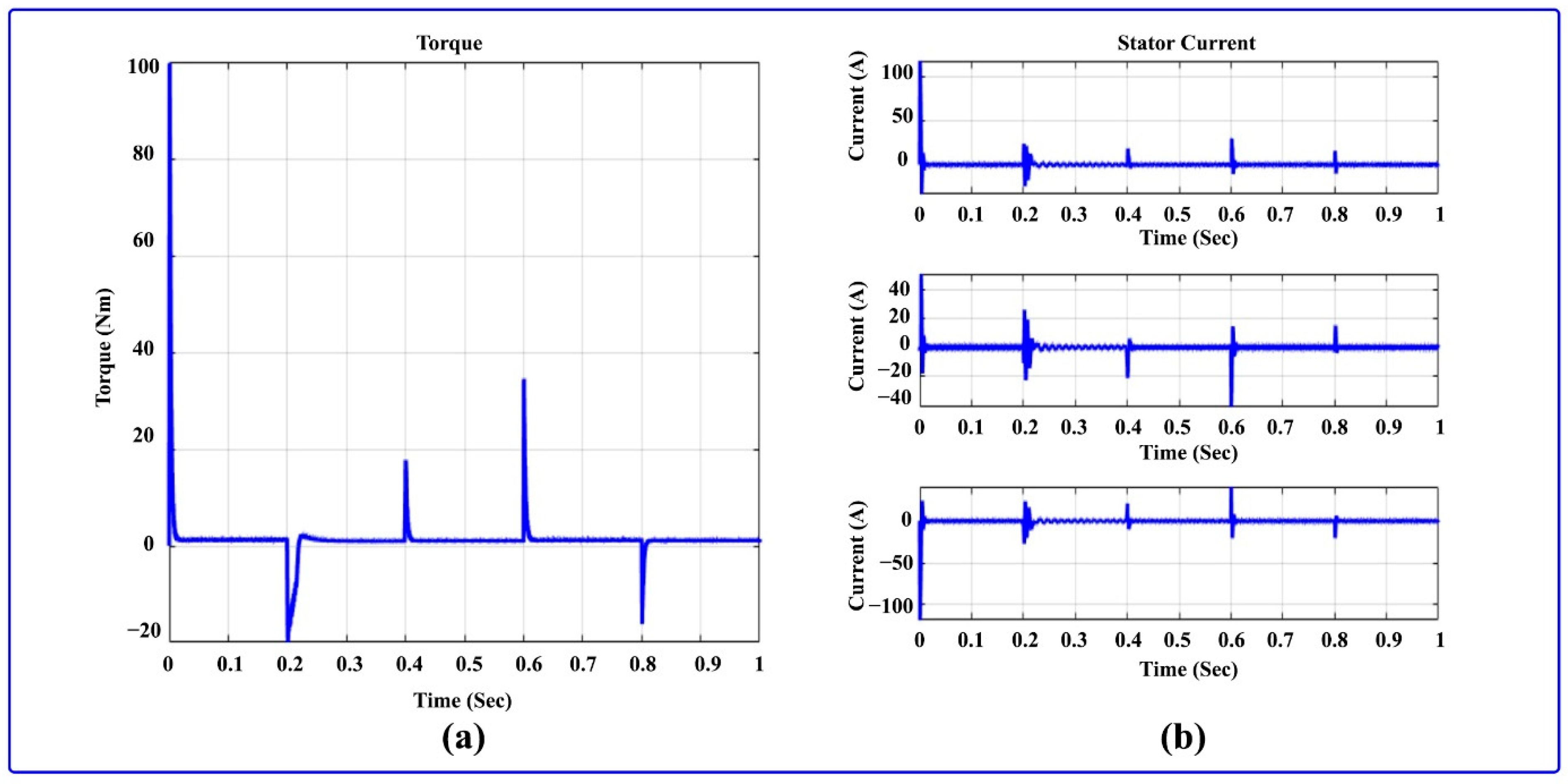
Figure 15 shows the stator current and torque of the BLDC motor. Here, a stator current of 3 ϕ is used to demonstrate how the BLDC motor’s torque is reached at 1.2 Nm.
Figure 15a at the beginning increases at 100 Nm, and at 0.02 s it decreases to 1.2 Nm.
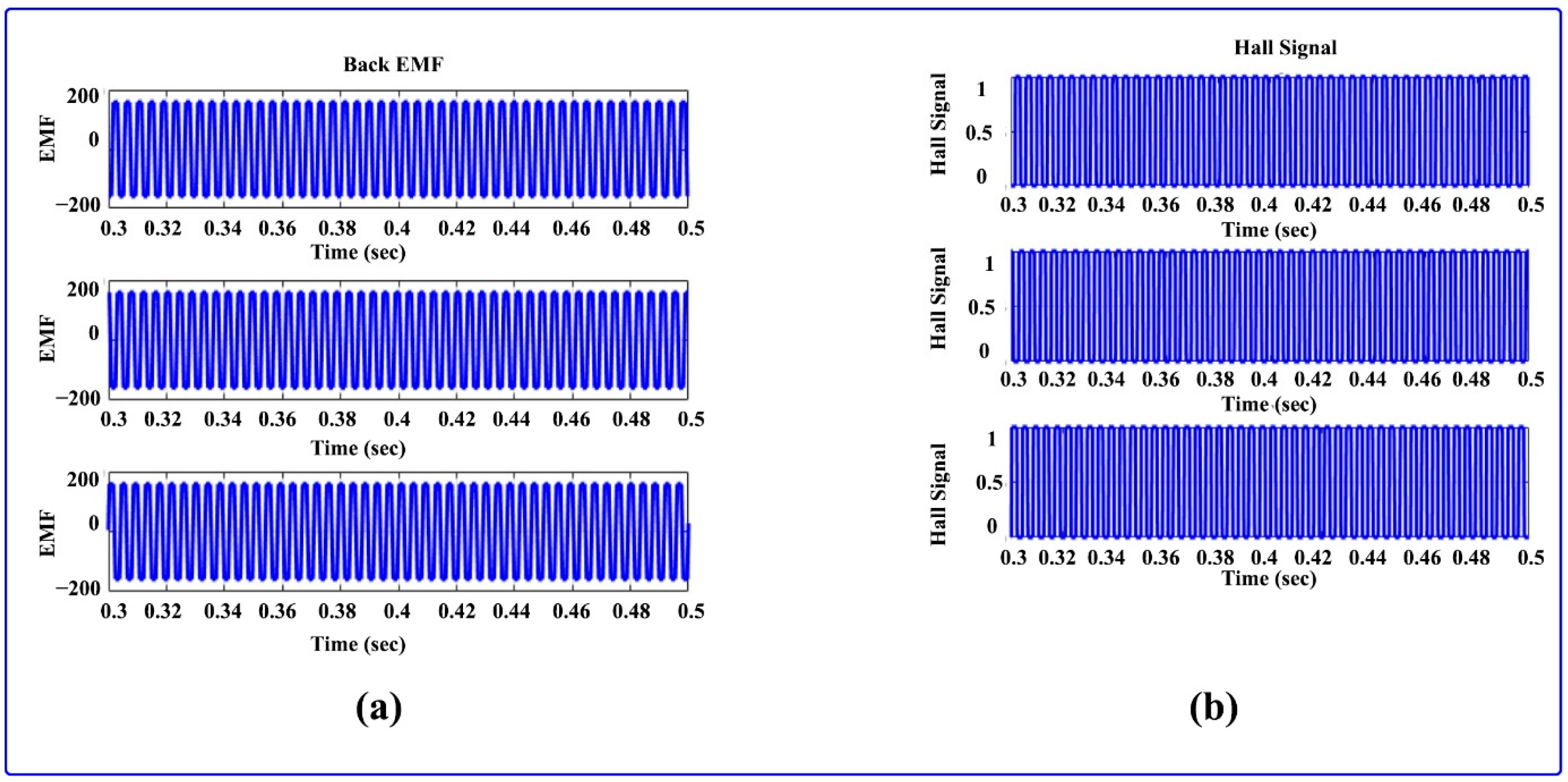
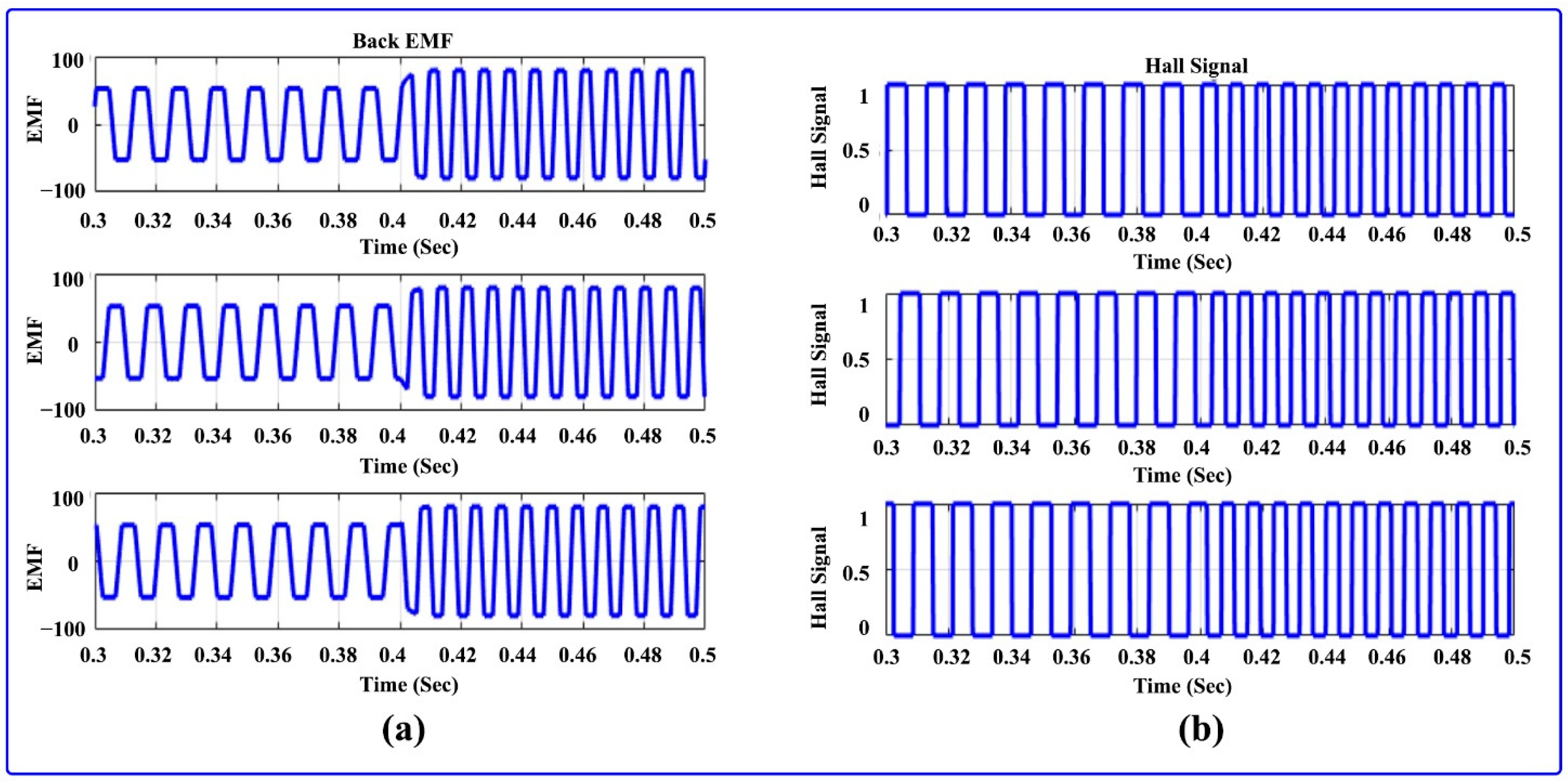
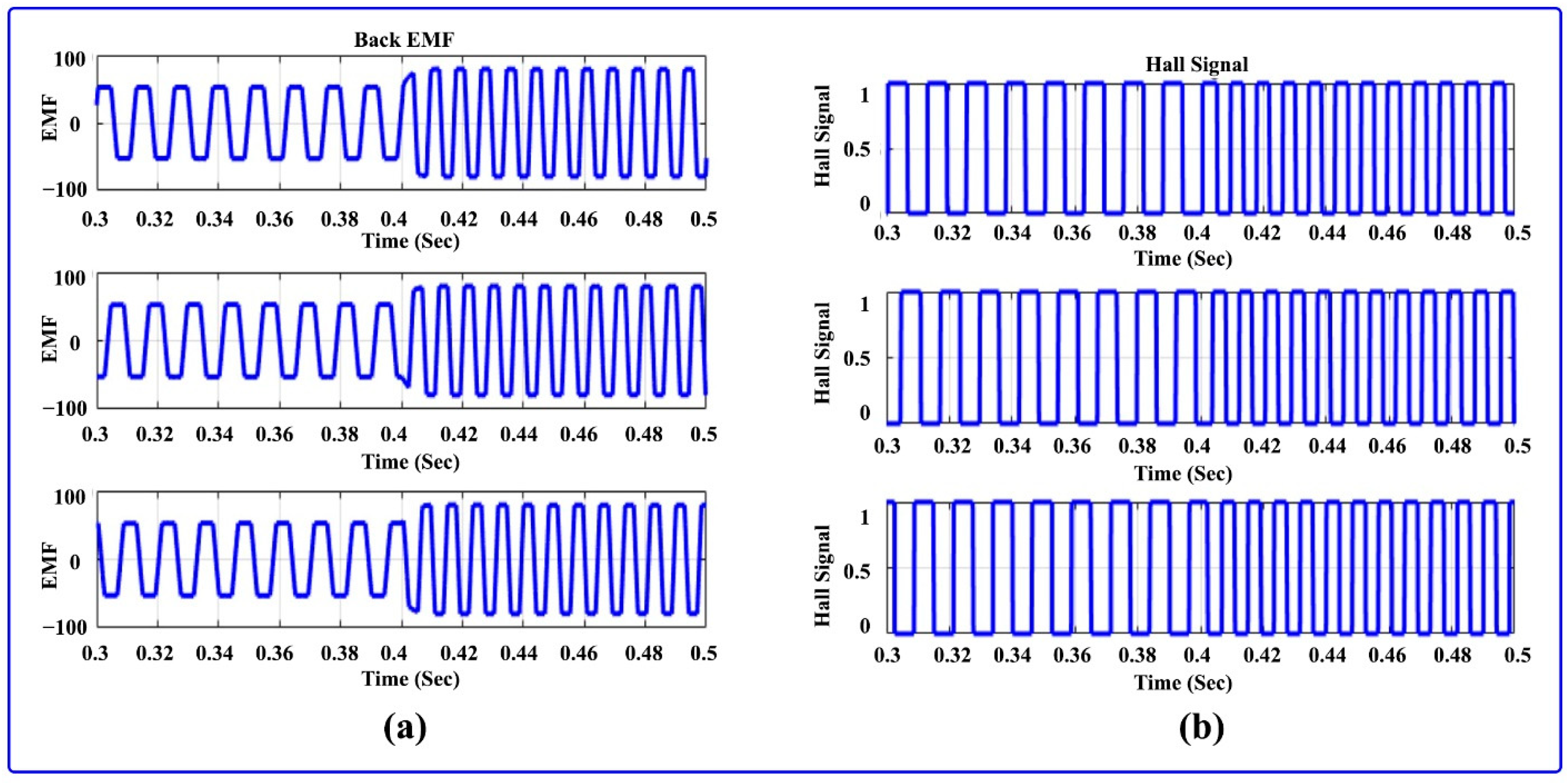
Figure 16 illustrates the Hall signal and back EMF of the BLDC motor.
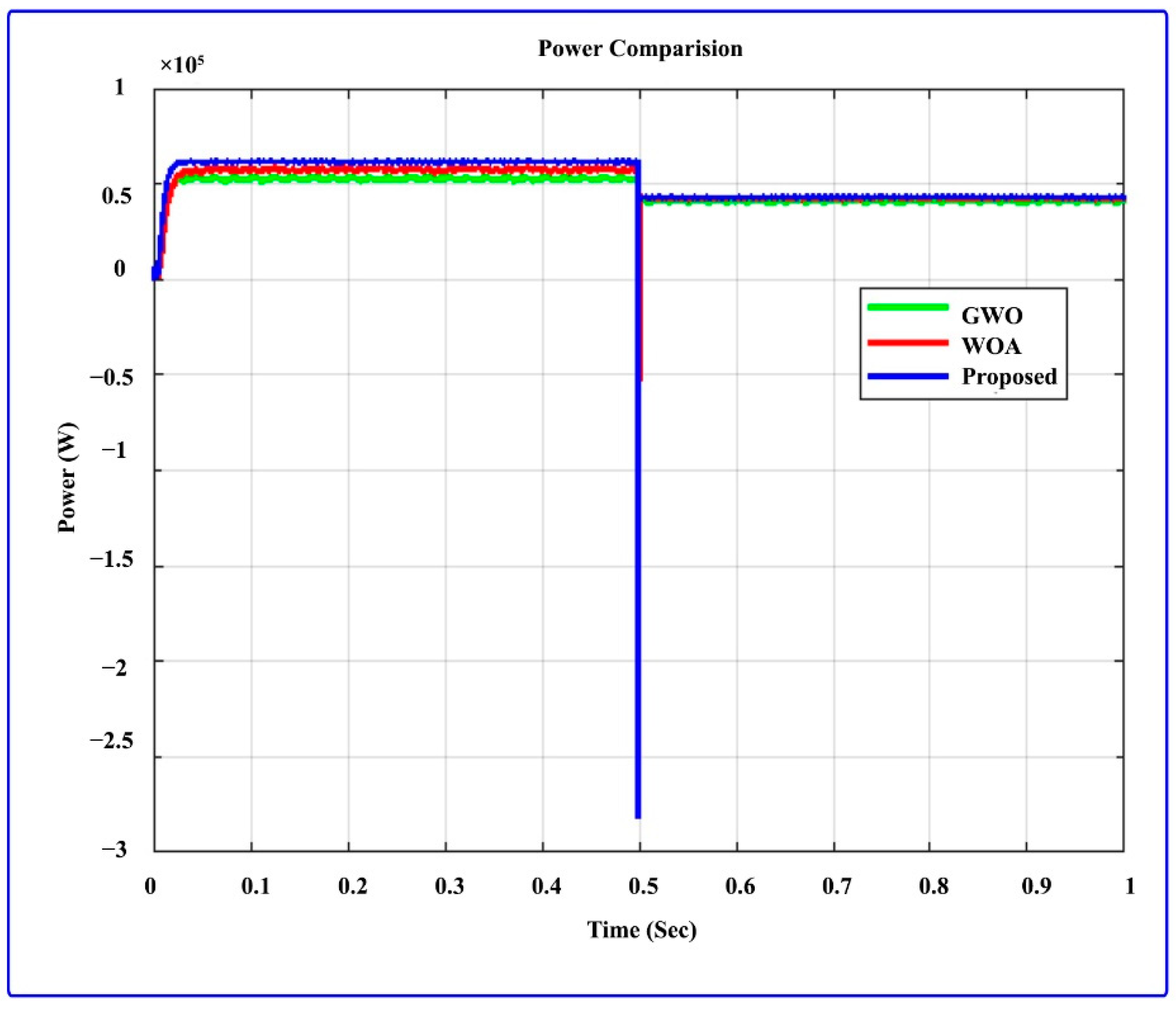
The MATLAB Simulink software is used to simulate the suggested work for 0–0.5 s in 1000 W/m
2 irradiation, 0.5–1 s in 500 W/m
2, with 3000 rpm motor speed and 25 °C constant temperature. In
Figure 17, the power flow across the MPA is settled in 0.02 s. The power through the GWO and WOA is settled in 0.06 and 0.35 s, respectively. This produces a highly fluctuated signal. The suggested power from solar PV reaches 63 kW in 0–0.5 s at an irradiance of 1000 W/m
2, as shown in the graph. Then, the power is changed to 40 kW after 0.5–1 s at an irradiance of 500 W/m
2. The suggested approach is related to the traditional approach, such as the GWO and WOA MPPT algorithm, and proves the advancement of the suggested method. The battery and PV output is depicted in
Figure 18.
Figure 18a illustrates the PV power, voltage, and current attained at 62 kW, 340 V, and 185 A, respectively, that were generated in solar PV at 0–0.5 s time range. The irradiance is 1000 W/m
2, and then suddenly PV power, PV current, and PV voltage raise to 61 kW, 175 A, and 325 V, respectively, and irradiance to 500 W/m
2.
The BLDC motor speed comparison at various irradiances is shown in
Figure 19. In
Figure 19a, the BLDC motor speed in regard to setting the reference speed of 3000 rpm for 0–0.5 s at PV irradiance is 1000 W/m
2. After 0.5 s at the same motor speed, PV irradiance is set to 500 W/m
2. The speed of the actual speed-to-reference speed comparisons is depicted in
Figure 19b. The torque of the BLDC motor and stator current is shown in
Figure 20;
Figure 20a shows the high torque starting stage of the motor after 0.01 s, which dropped immediately to settle at 0.01 s on 1.2 Nm. The comparison of speed during the constant speed and variable irradiance of the motor is shown in
Figure 20b. The Hall signal and back EMF of all phases are shown in
Figure 21a,b.
The input for this mode is variable motor speed and constant irradiance; 1000 W/m
2 for constant irradiance, 3000 W/m
2 for 0–0.2 s, 1000 W/m
2 for 0.2–0.4 s, 1500 W/m
2 for 0.6–0.8 s, 2500 W/m
2 for 0.6–0.8 s, and 2000 W/m
2 for 0.8–1 s for BLDC motor speed, respectively.
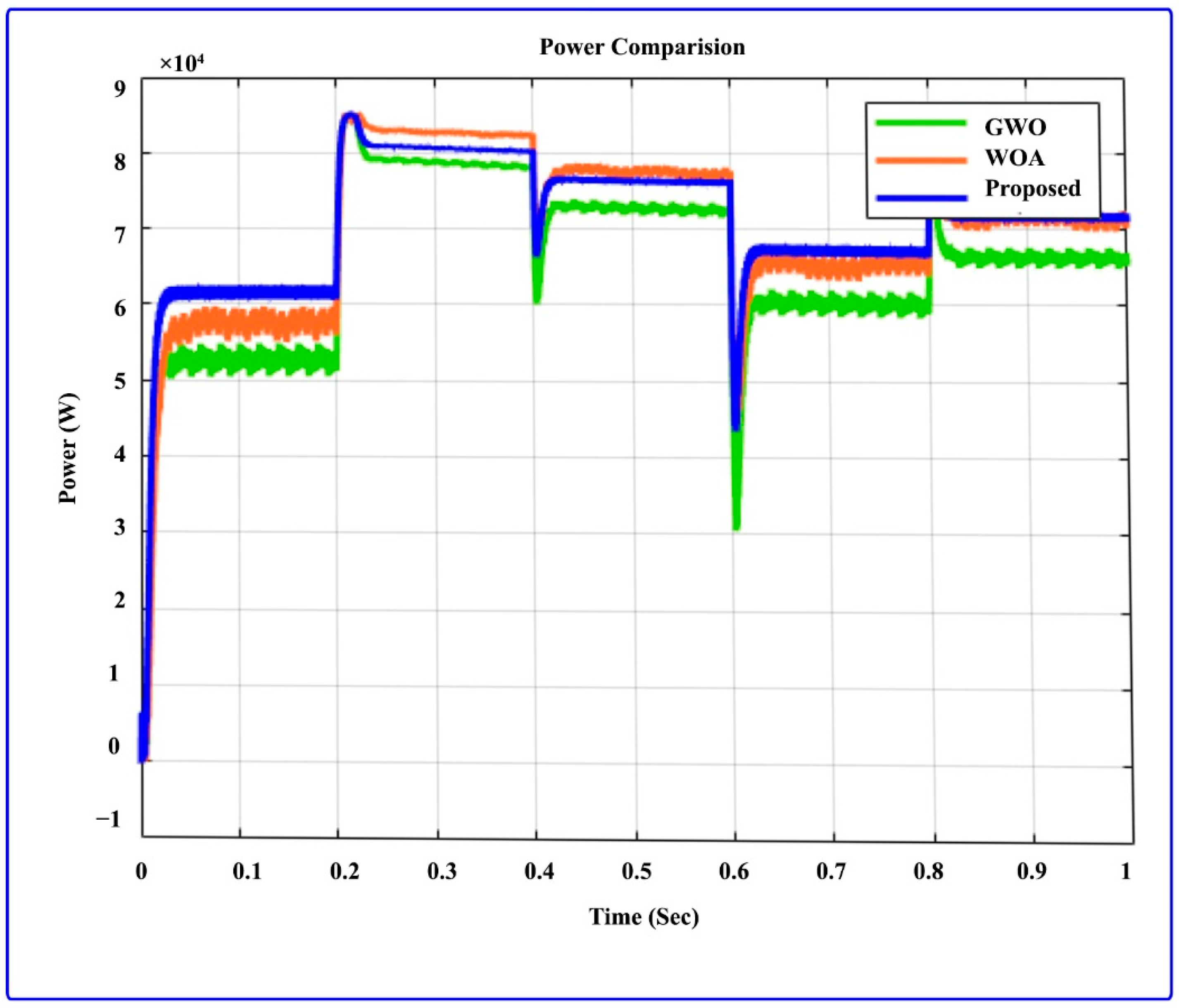
Figure 22 illustrates the PV power at the variable motor speed and constant irradiance comparison. The suggested approach is more admirable than the GWO and WOA. According to the variation in the motor speed, the power will be varied. When the motor speed is 3000 rpm, the suggested technique power will reach 62 kW. When the motor speed is decreased to 1000 rpm, the suggested technique power is increased from 62 KW to reach a power of 81 kW. Accordingly, for motor speeds of 1500 rpm, 2000 rpm, and 2500 rpm, the power of the suggested approach will be 78 kW, 70 kW, and 68 kW, respectively.
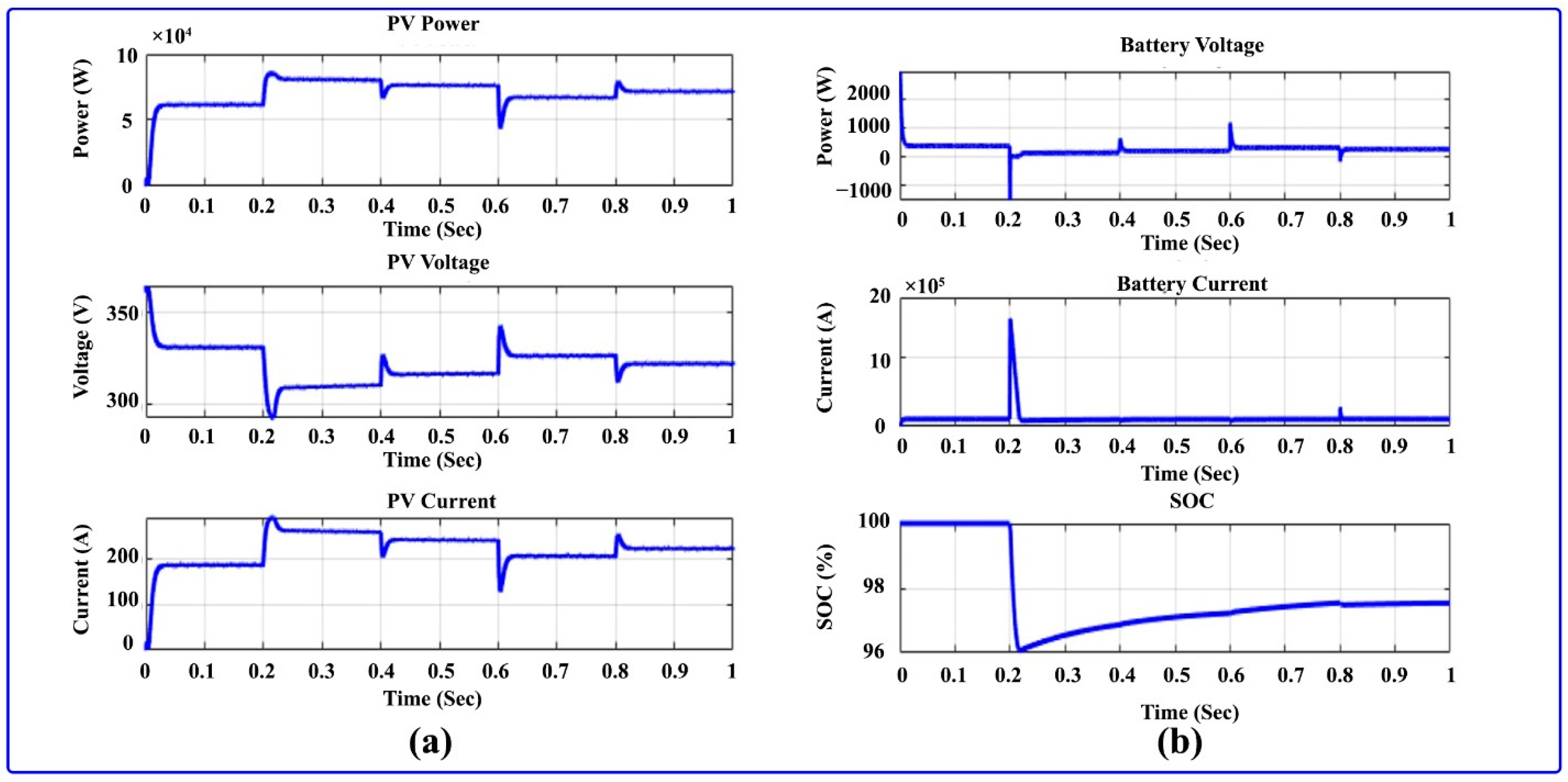
Figure 23 depicts the PV output and battery output at 1000 W/m
2 of constant irradiance, and variable speeds of 3000 between 0 and 0.2 s, 1000 from 0.4–0.6 s, 2500 from 0.6–0.8 s, and 2000 from 0.8–1 s are used. The PV current, power, and voltage are shown in
Figure 23a. In that PV power for the regular interval of (0.2, 0.4, 0.6, 0.8), high changes may occur for the regular interval. In the meantime, the voltage of PV is drained to 325 V, and the current of PV is increased to 220 A. The battery SOC, battery current, and voltage of the battery are depicted in
Figure 24. The changes in battery current and voltage, as well as battery charging and discharging, are caused by the variable motor-speed input. The BLDC motor Hall signal and back EMF at variable speed and constant irradiance are depicted in
Figure 25.
Figure 26 illustrates the comparison of power output at variable motor speed and variable irradiance. In this mode, variable irradiance is 1000 W/m
2 for 0–0.5 s before shifting to 500 W/m
2 for 0.5–1 s. Additionally, the speed is fixed at 3000 rpm for 0–0.2 s, 1000 rpm for 0.4–0.6 s, 1500 rpm for 0.6–0.8 s 2500 rpm, and 2000 rpm for 0.8–1 s. The advanced approach is related to the traditional approach to prove its advantages. The PV and battery output are depicted in
Figure 27. The output of the solar PV at variable speed and irradiance is illustrated in
Figure 27a. Power from PV varies concerning varying irradiance and variable speed. Between 0 and 0.5 s, the variable irradiance is changed to 1000 W/m
2 and 500 W/m
2 between 0.5–1 s. Furthermore, the BLDC motor speed is modified, from 0 to 0.2 s, 3000 rpm, 1000 to 0.4 s, 1500 to 0.6 s, 2500 to 0.8 s, and 2000 to 1 s. All outcomes from PV are changed in favor of the variable speed and variable irradiance.
Figure 27b shows the outputs of the battery current, battery voltage, and battery SoC. The BLDC motor speed and a comparison of its speed under different irradiation conditions are illustrated in
Figure 28. The motor’s speed relative to the reference speed for 1000, 1500, 2000, 2500, and 3000 rpm is demonstrated in
Figure 28a. The comparison speed to a reference speed is illustrated in
Figure 28b. The reference speed is denoted as a straight red line, and the BLDC motor’s actual speed is mentioned as a blue line. The variable speed is given to 0, 0.2, 0.4, 0.6, and 0.8 s time intervals at 3000, 1000, 1500, 2500, and 2000 rpm.
Figure 29 depicts the BLDC motor stator current and torque.
Figure 29a illustrates the torque. Due to modifications made to the speed of the BLDC motor and irradiance of the solar PV panel, the peak and dip on the torque are now visible.
Figure 29b illustrates all three-phase stator currents. Solar energy is used by the boost converter to power the 3000 rpm, 48 V, 1 kW BLDC motor and for battery charging. The operation of a variable speed BLDC motor is shown in
Figure 28. We started the motor for 0.2 s and set the reference speed of 3000 rpm. After that, for 0.4 s it is shifted to 1000 rpm, then for 0.6 s it is changed to 1500 rpm, and at the end, it is changed to 2500 rpm. The speed of the motor reaches the designated reference speed in less than 0.01 s.
Figure 29a shows the variation in the torque, first supplied at 100 Nm for 0.01 s. Due to speed changes, there are a few spikes in the torque.
Figure 29b illustrates the motor current, the result of which is a spike representing a change in speed.
Figure 30 illustrates the BLDC motor Hall signal and BLDC motor back EMF; it is varied with variation in speed of 1000, 1500, 2000, 2500, and 3000 rpm. According to the above results, the proposed approach is superior to the existing approach.
Table 1 and
Table 2 present the qualitative and quantitative comparative analysis of the existing [
29] and proposed optimization-based MPPT techniques, respectively. During quantitative analysis, the tracking time and efficiency measures are compared with the conventional P&O, FLC, and AFLC mechanisms. Then, the overall performance of the MPPT controlling algorithms is validated and compared during qualitative analysis based on the parameters of tracking speed, complexity, tracking efficiency, reliability, MPP oscillations, and tracking accuracy. The MPA-MPPT controlling technique provides highly improved results compared to the standard MPPT techniques.
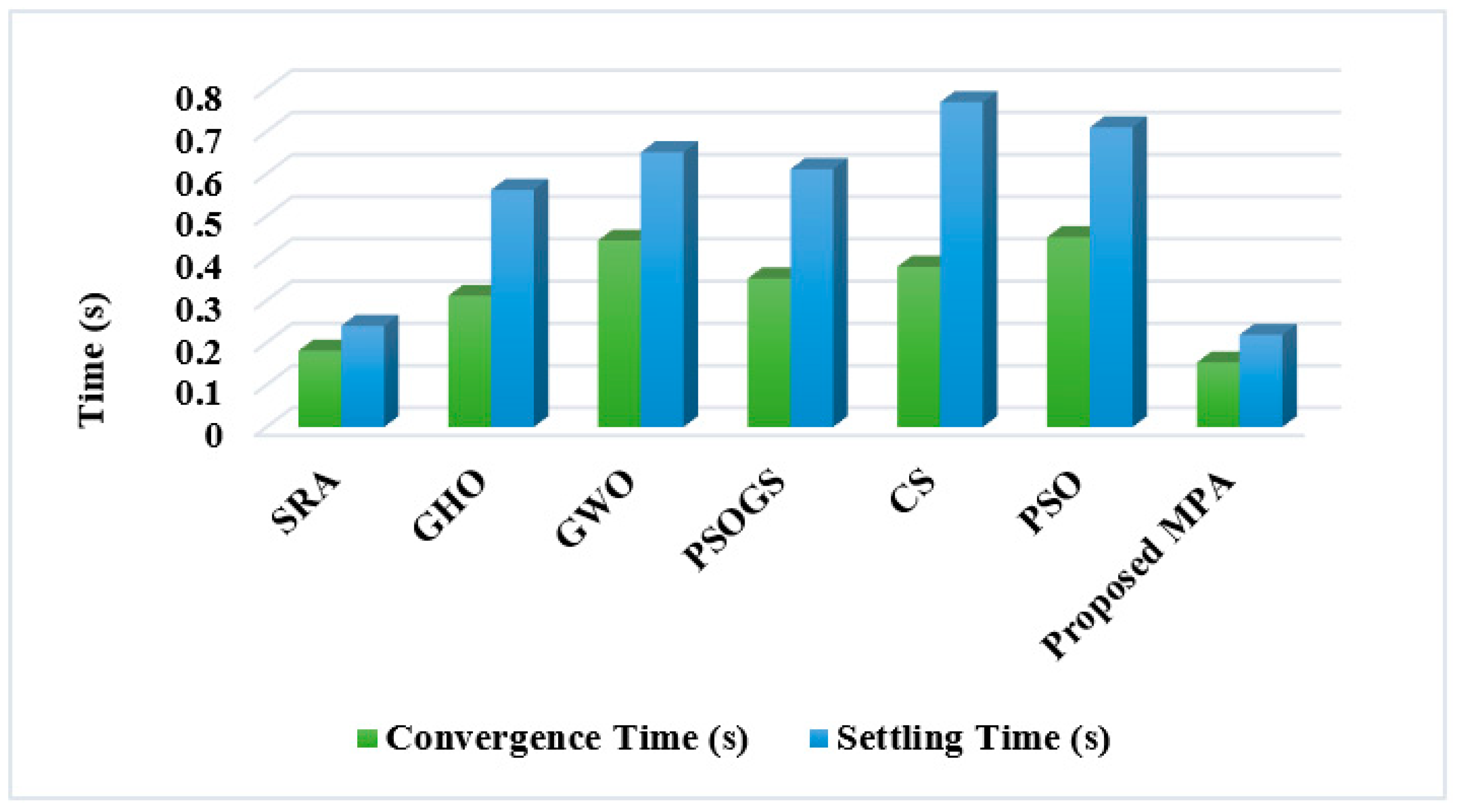
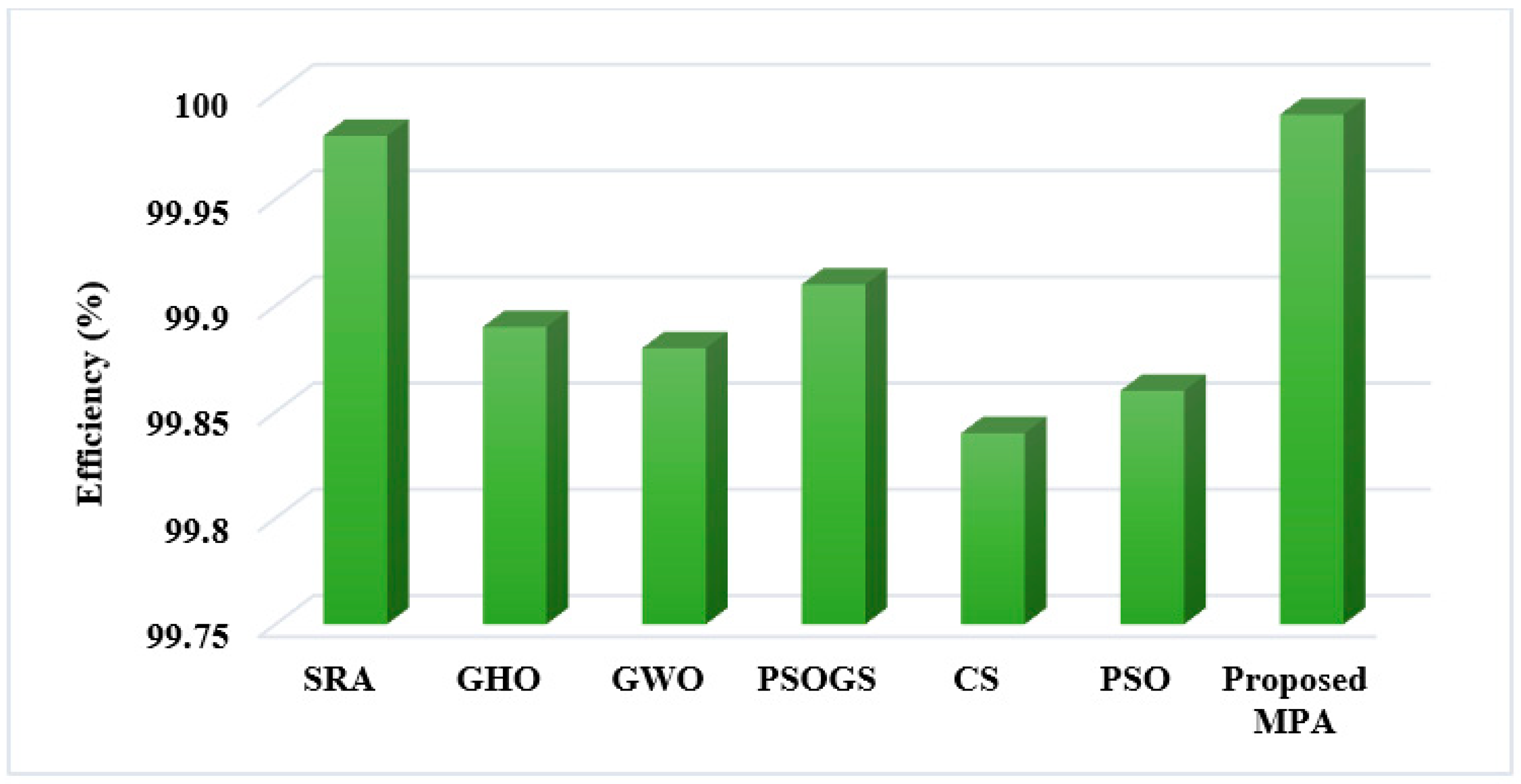
Table 3 presents the comparative analysis of existing [
30] and proposed optimization-based MPPT controlling techniques based on the parameters of convergence time, settling time, and efficiency. Then, its corresponding graphical illustrations are presented in
Figure 31 and
Figure 32, respectively. The estimated analysis proves that the time of the proposed MPA technique is greatly increased with high efficiency, which is highly superior to the other MPPT controlling techniques.

 ,
, 


































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}