
Numerical Analysis of an Explicit Smoothed Particle Finite Element Method on Shallow Vegetated Slope Stability with Different Root Architectures
Abstract
:1. Introduction
2. Materials and Methods
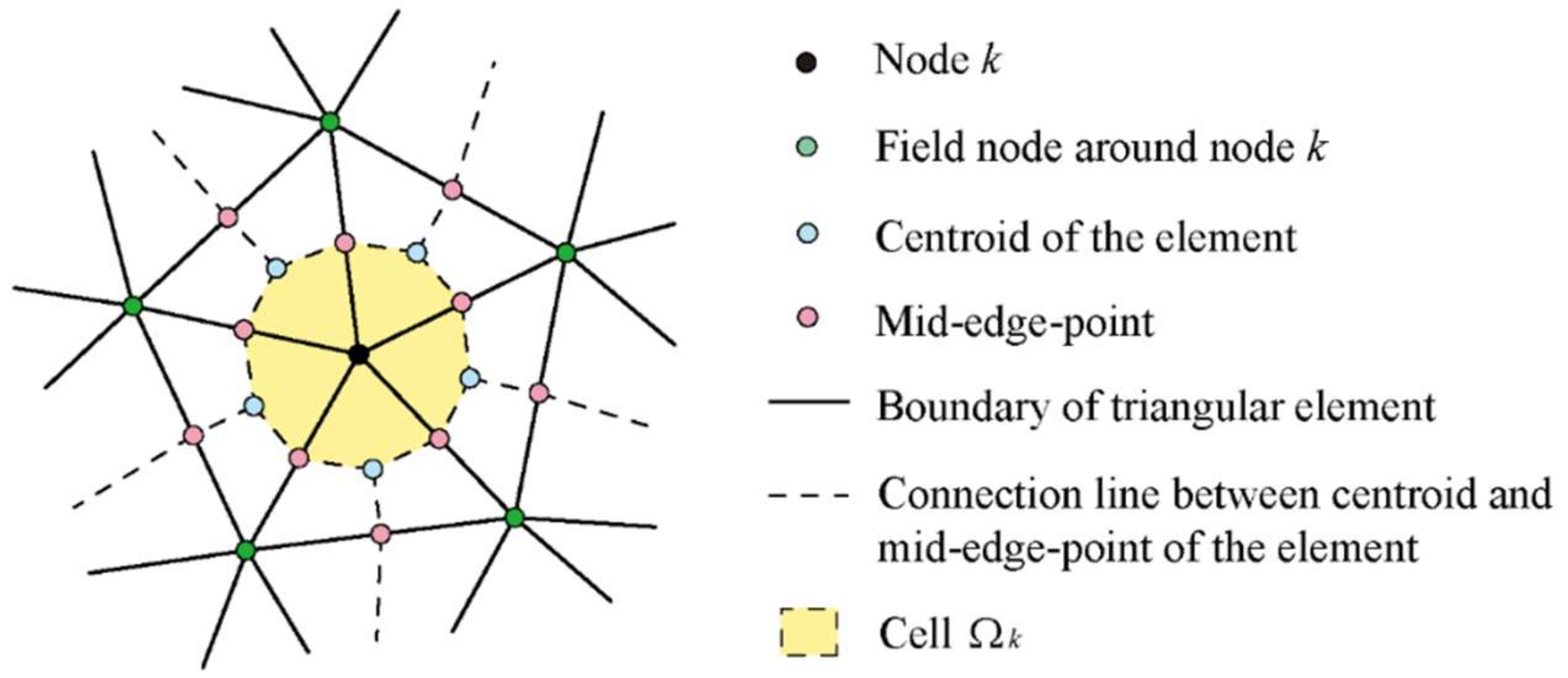
2.1. The eSPFEM Approaches
- (1)
- Generate mesh using Delaunay triangulation and alpha shape technique;
- (2)
- Acquire basic data of elements and nodes;
- (3)
- Calculate smoothed strains of nodes;
- (4)
- Update stresses of nodes through constitutive integration;
- (5)
- Calculate internal forces of nodes;
- (6)
- Update velocities and position.
2.2. Modelling the Mechanical Effect of Roots
2.3. Mechanical Effect of Root-Soil on Shallow Slope Stability
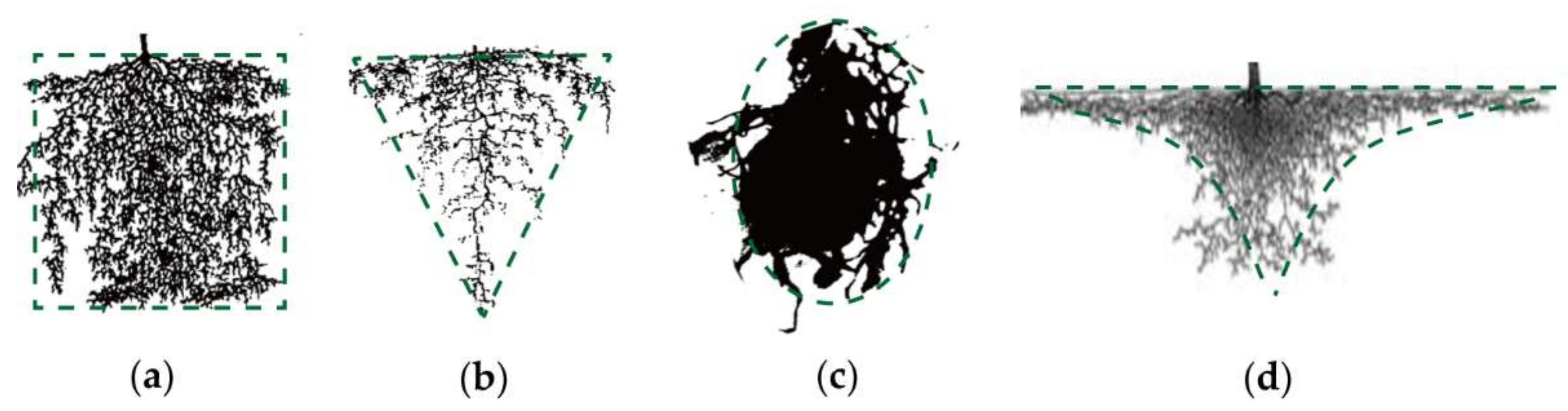
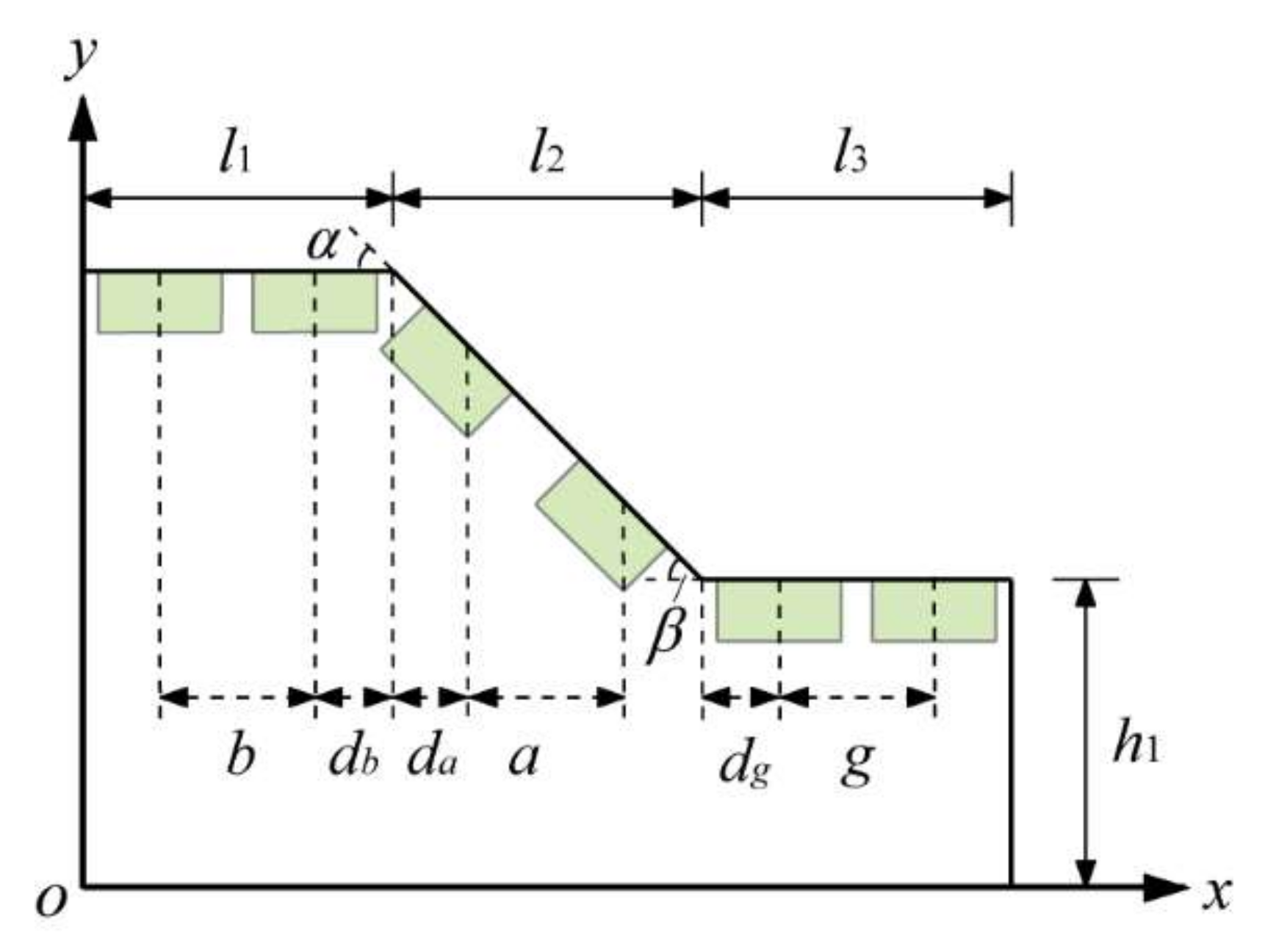
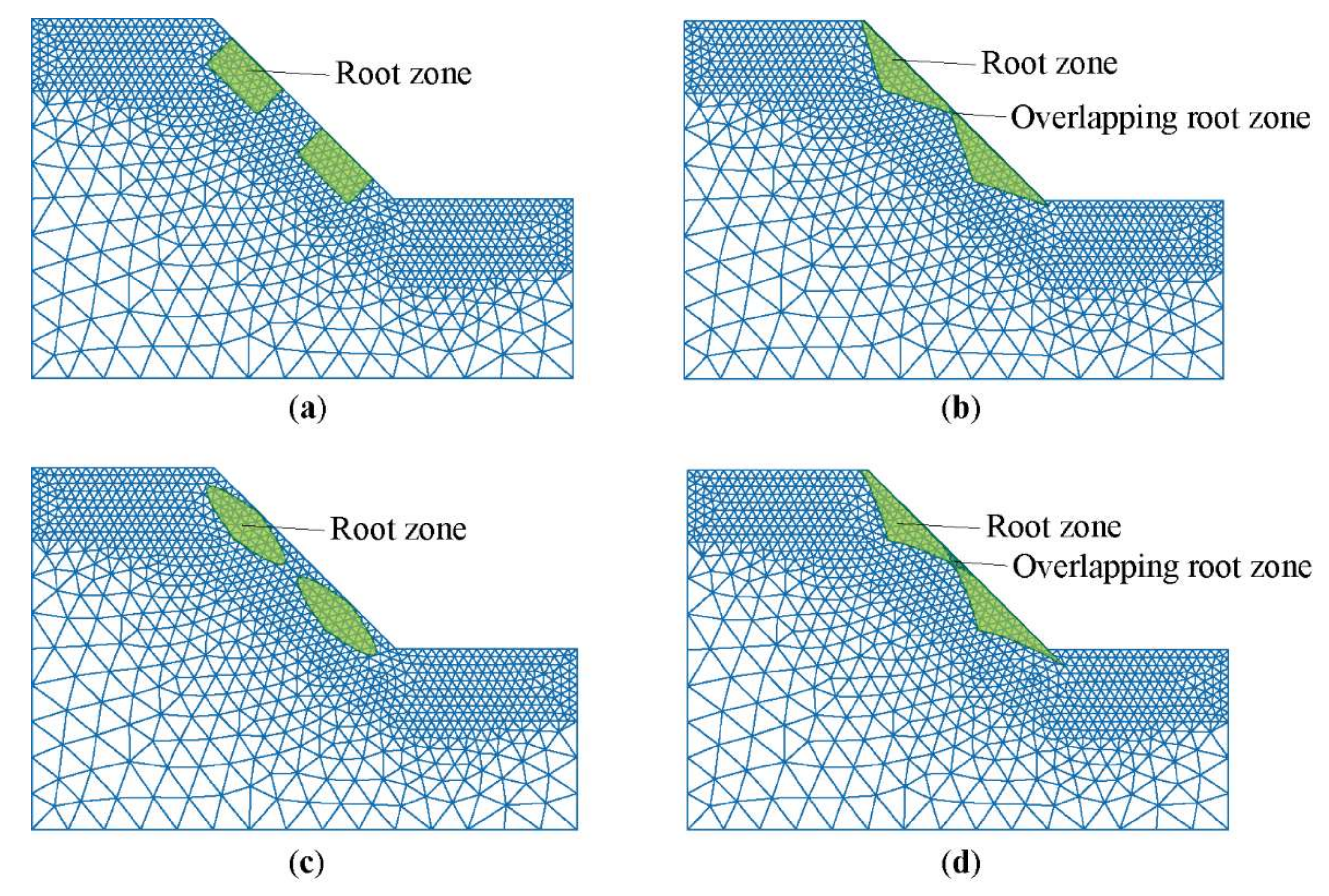
2.4. The Four Patterns of Root Geometry
2.4.1. Idealisation of Typical Patterns of Root Architecture
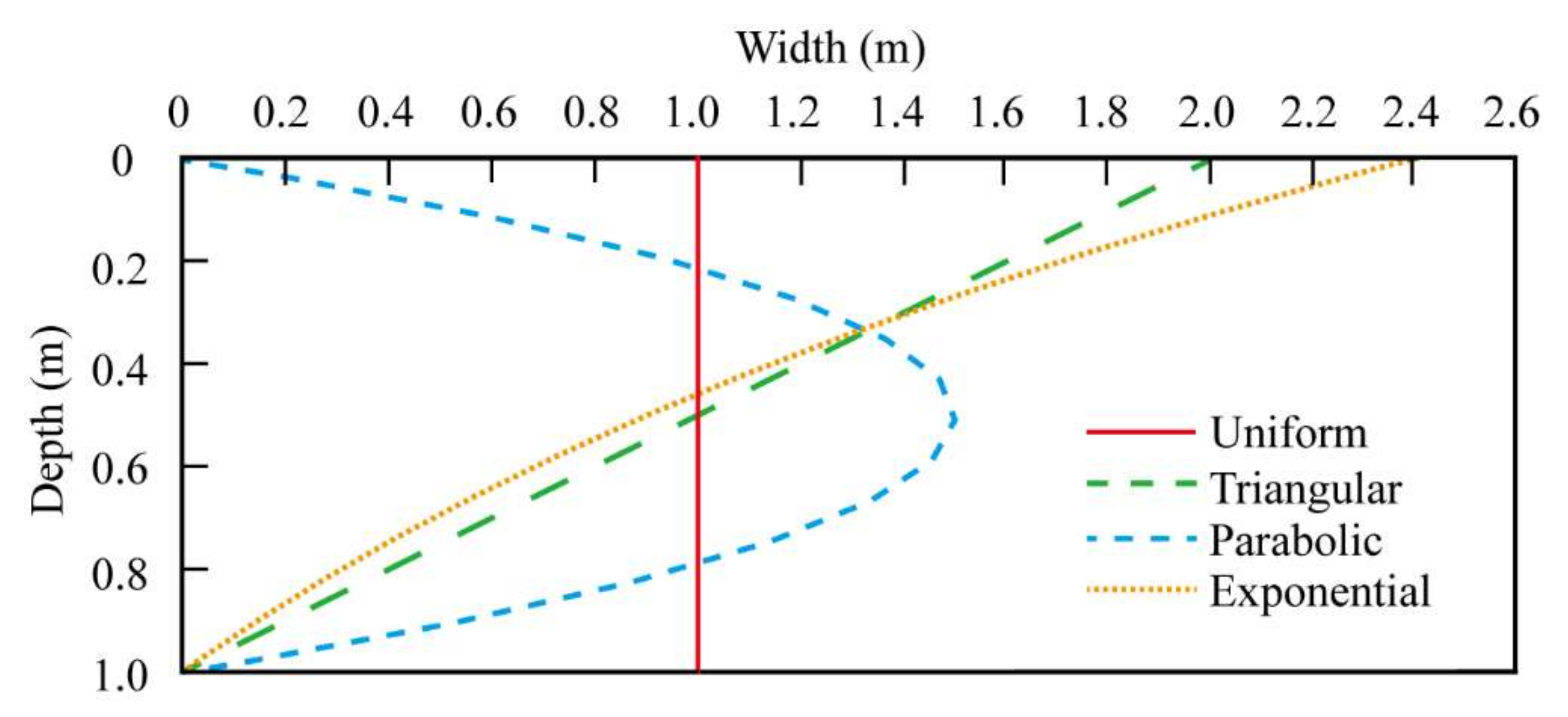
2.4.2. Root Architecture Functions on Slope
- Uniform distribution
- 2.
- Triangular distribution
- 3.
- Parabolic distribution
- 4.
- Exponential distribution
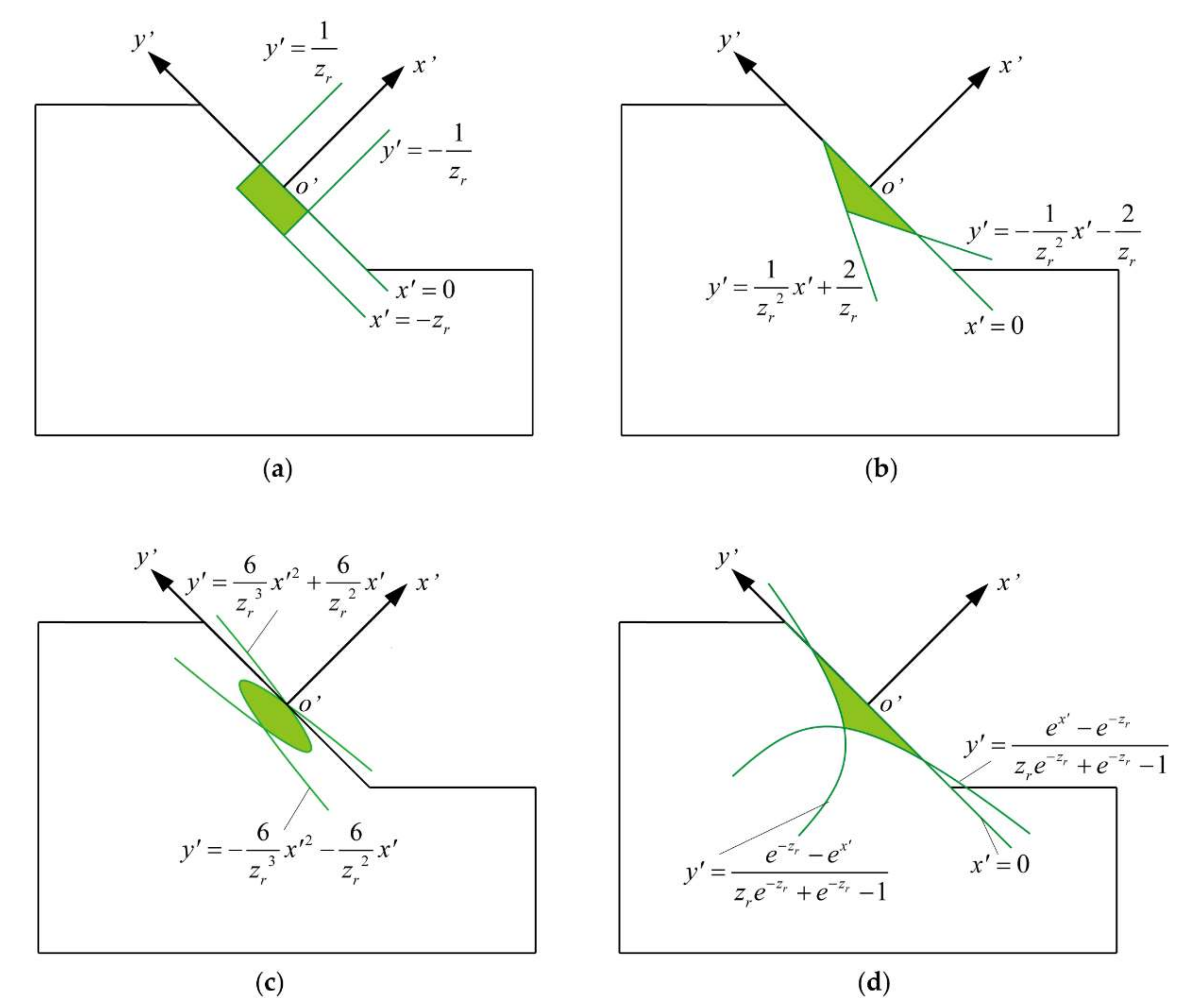
2.4.3. Root Architecture Functions after Coordinate Transformation
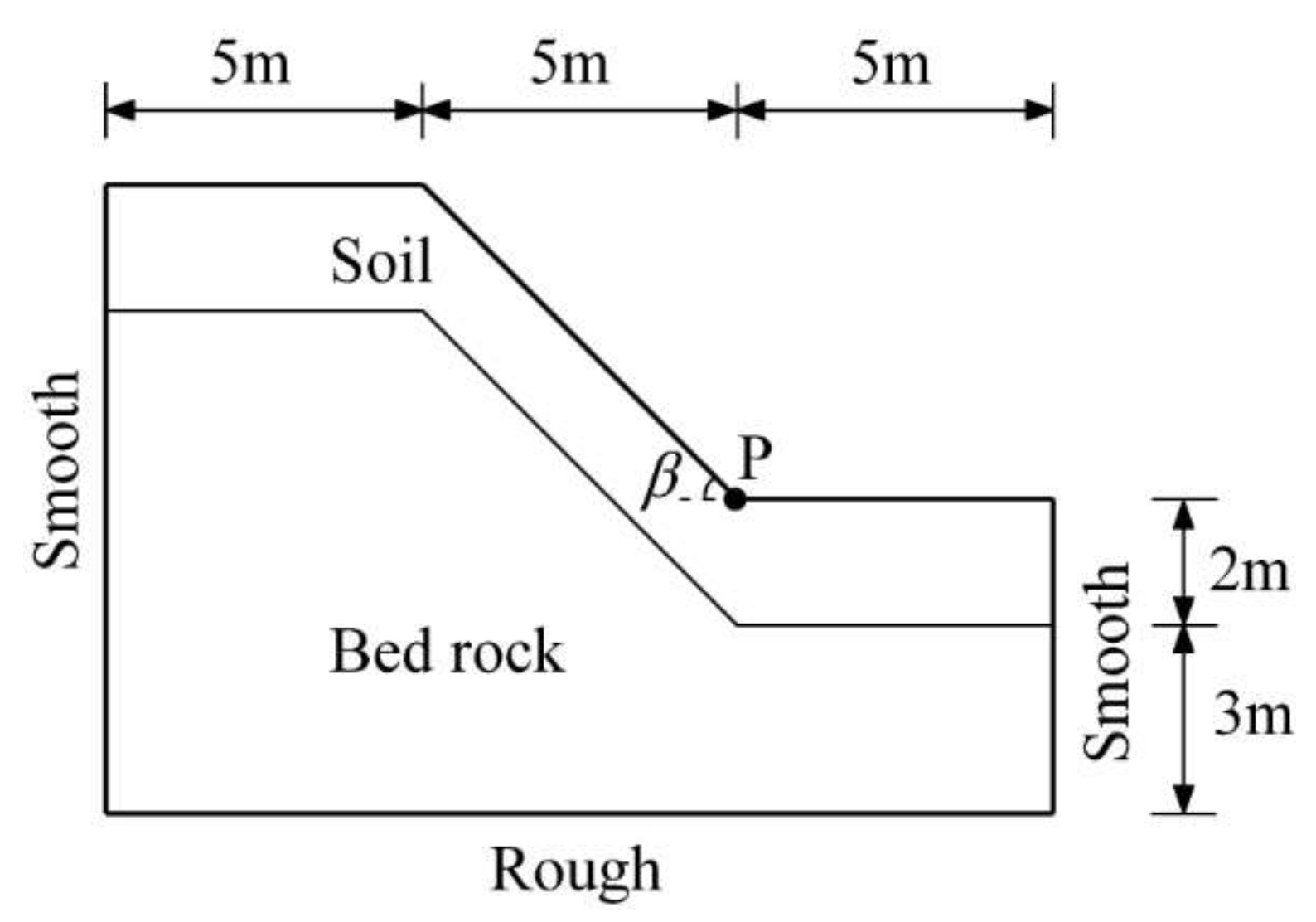
2.5. Numerical Implementation
3. Results
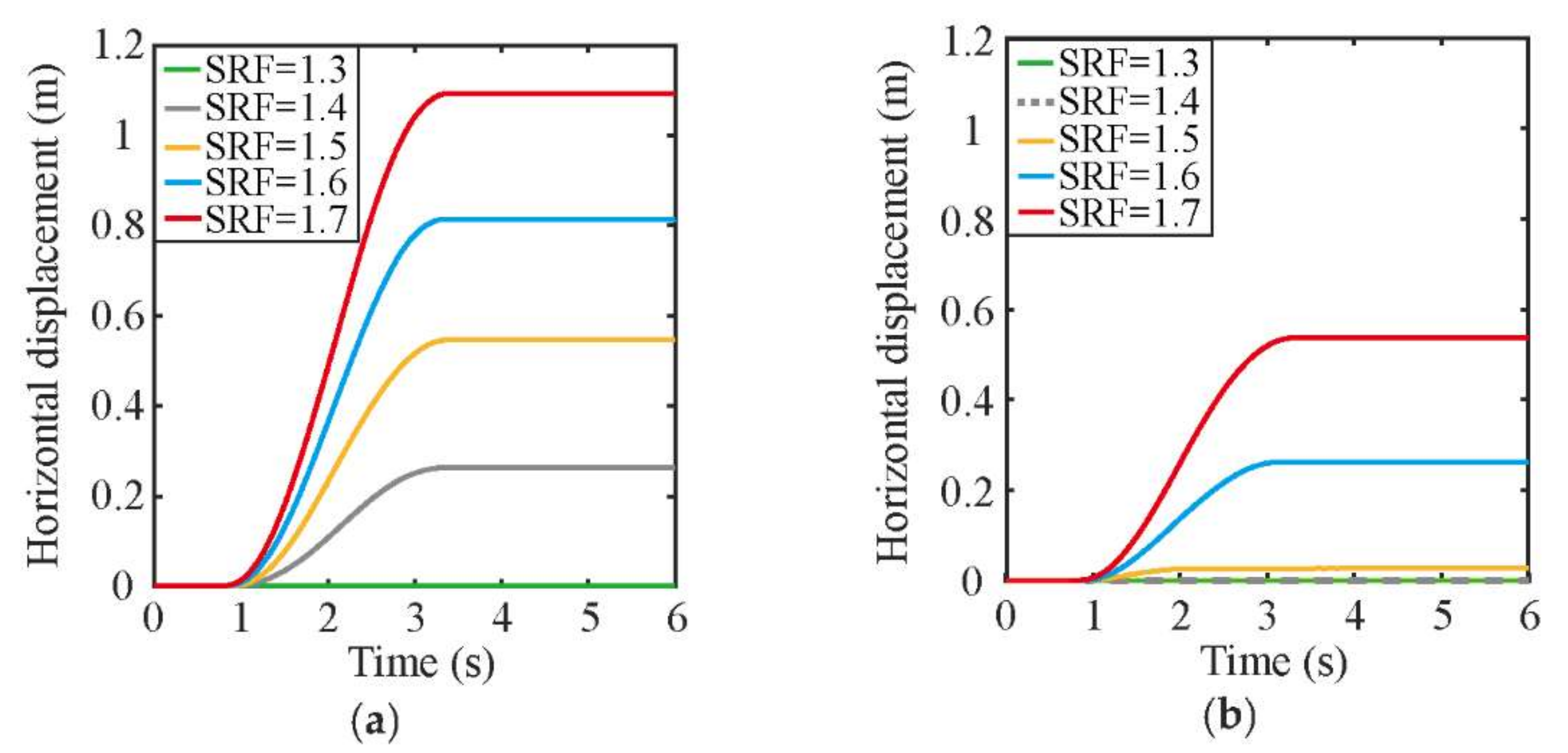
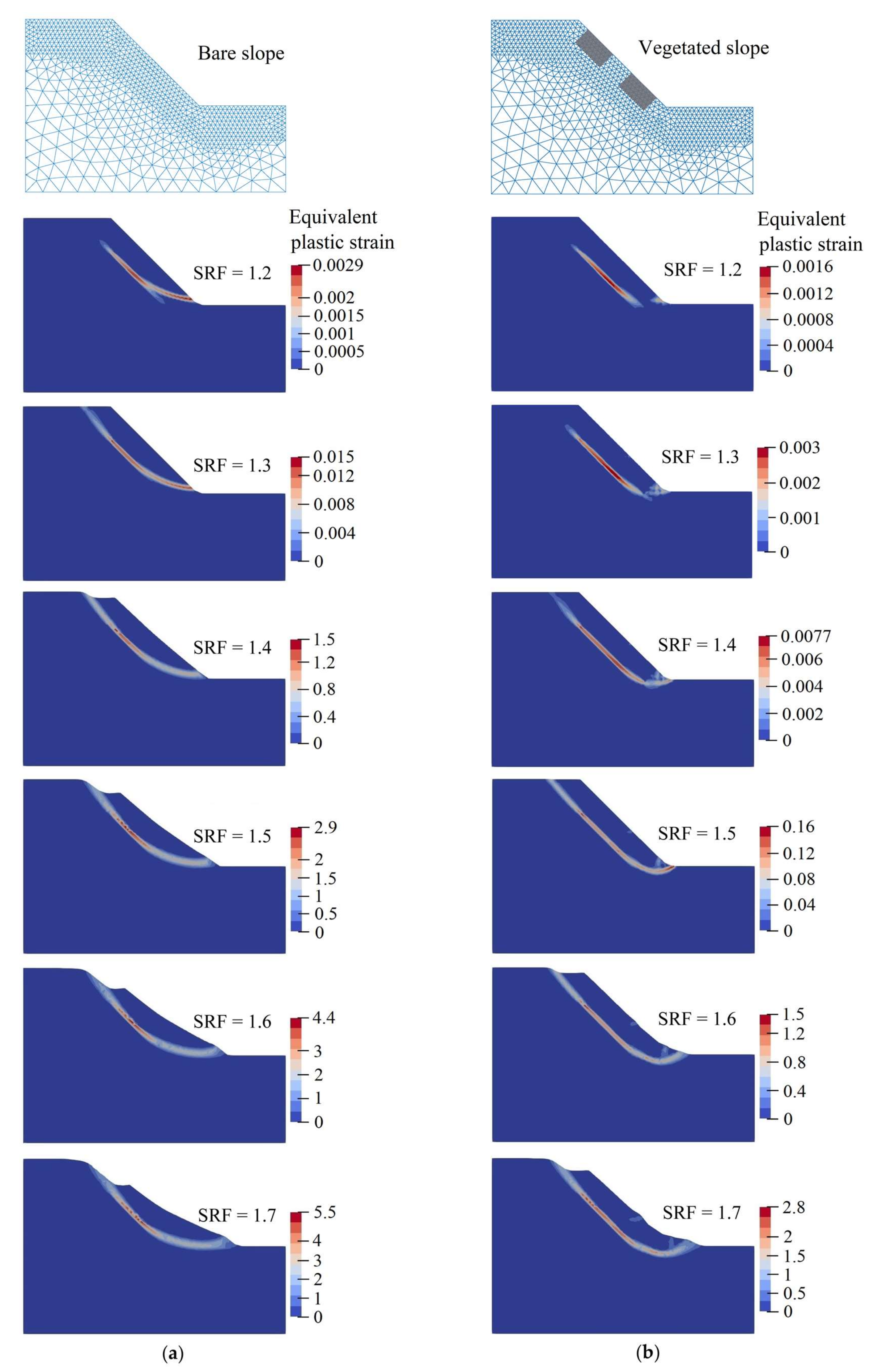
3.1. Comparison of the Instability of the Vegetated Slope and Bare Slope
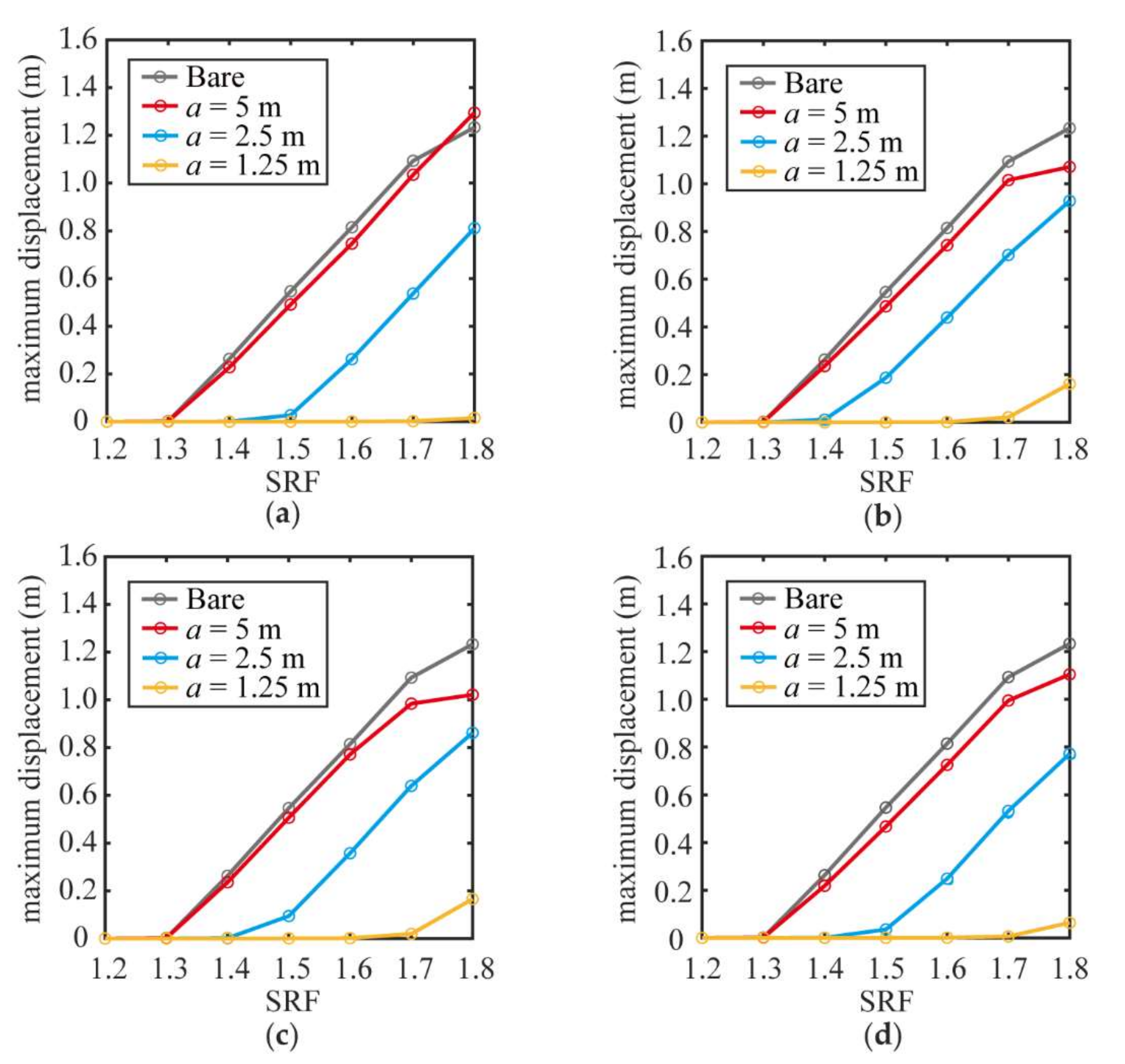
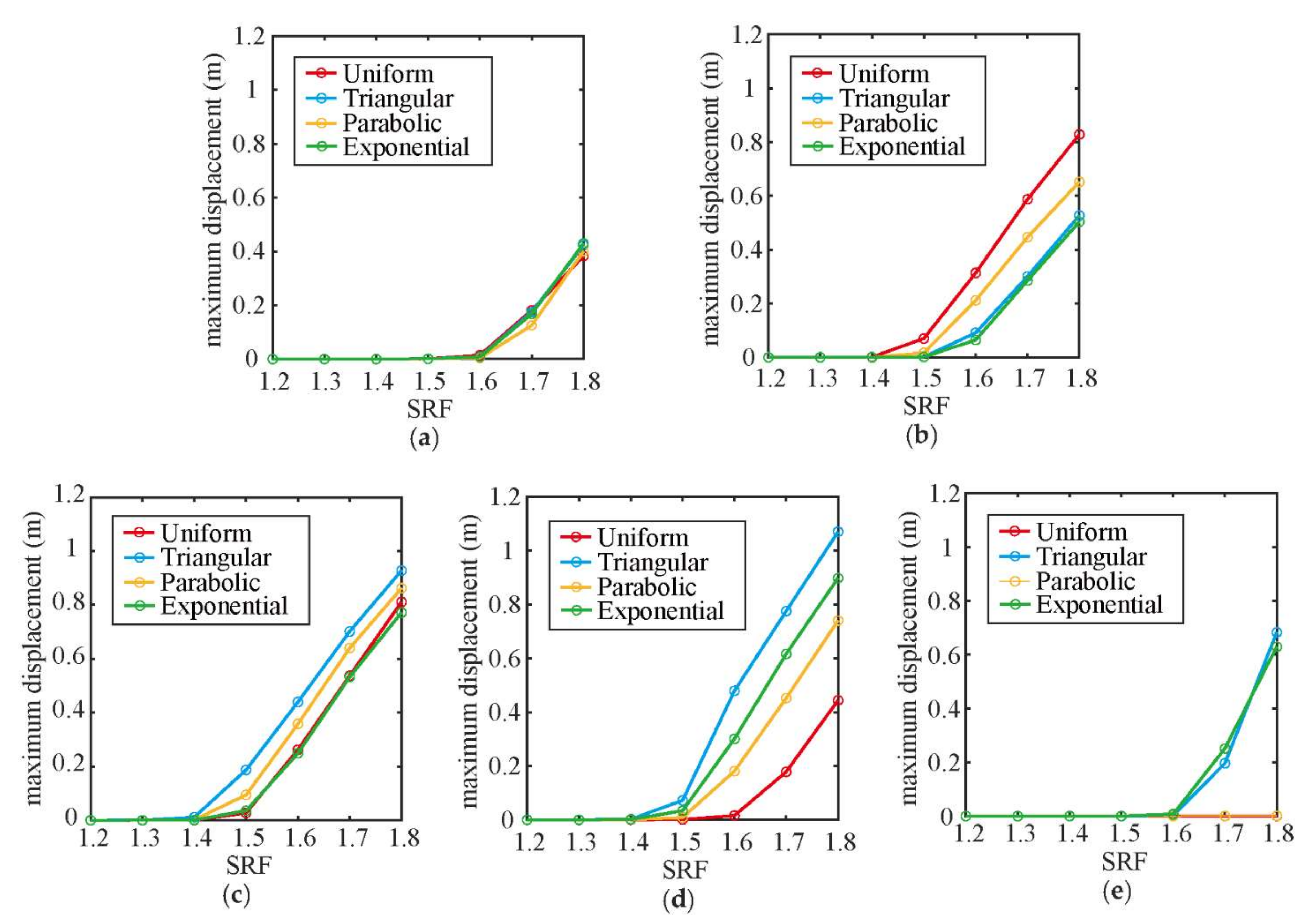
3.2. Effects of the Planting Distance on the Stability of the Vegetated Slopes
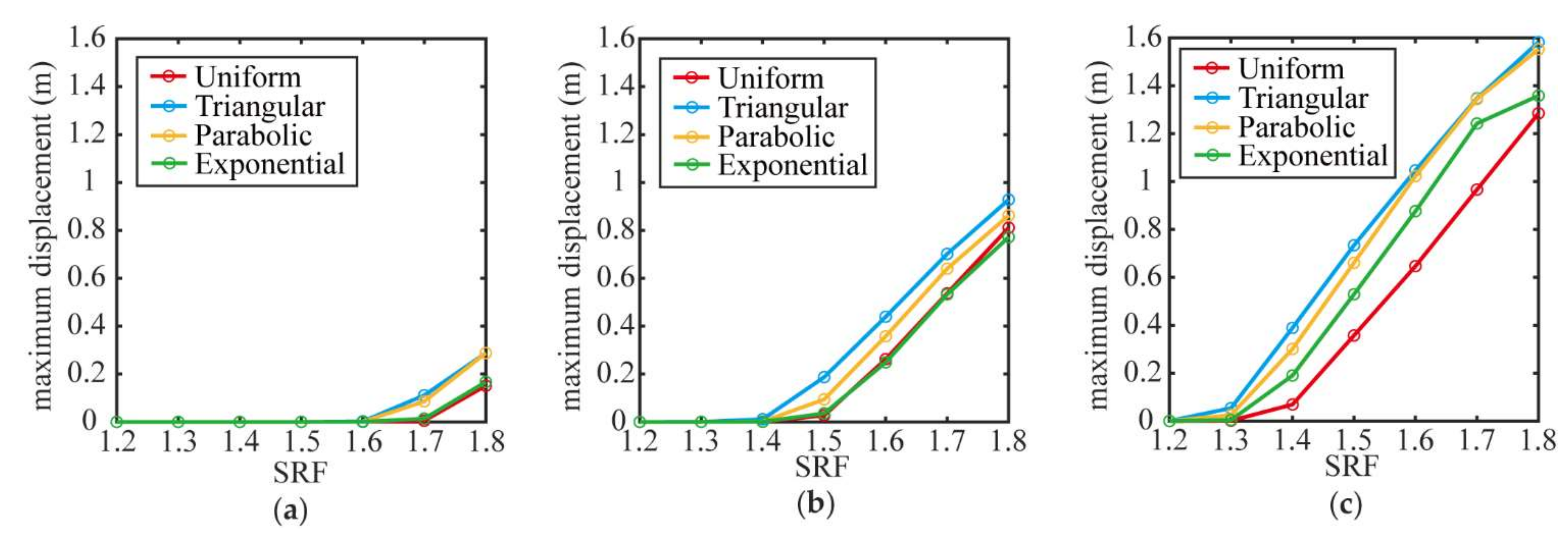
3.3. Role of the Root Depth in the Stability of the Vegetated Slopes
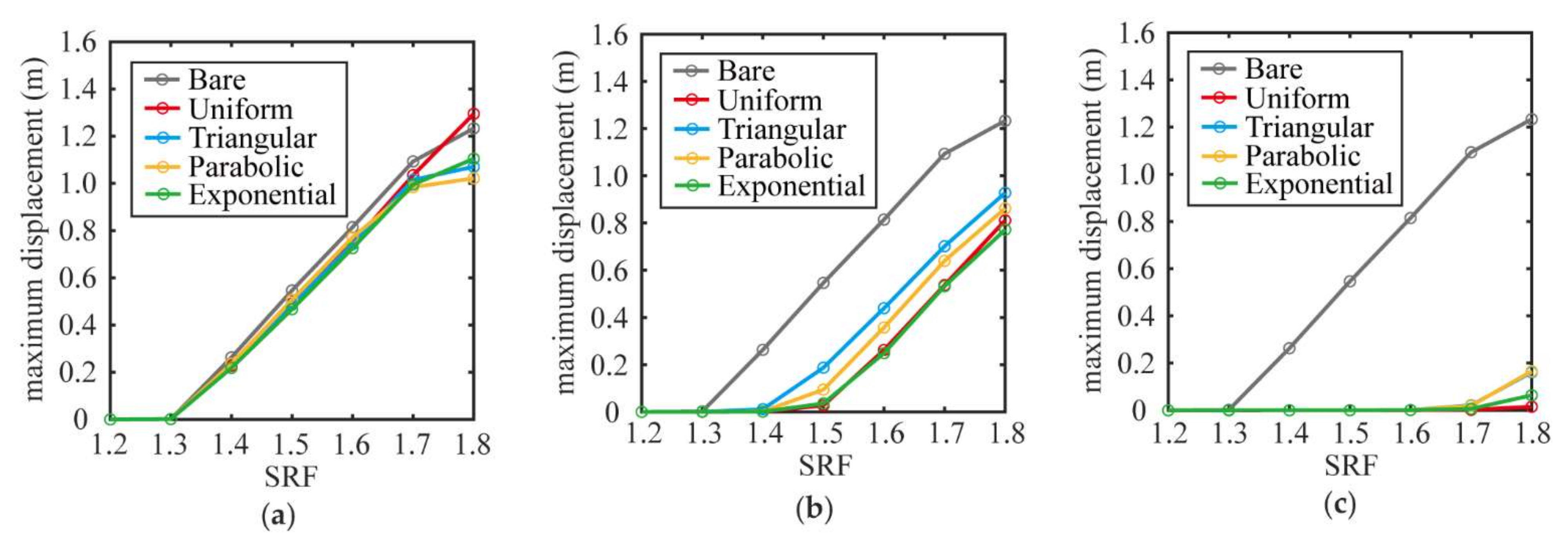
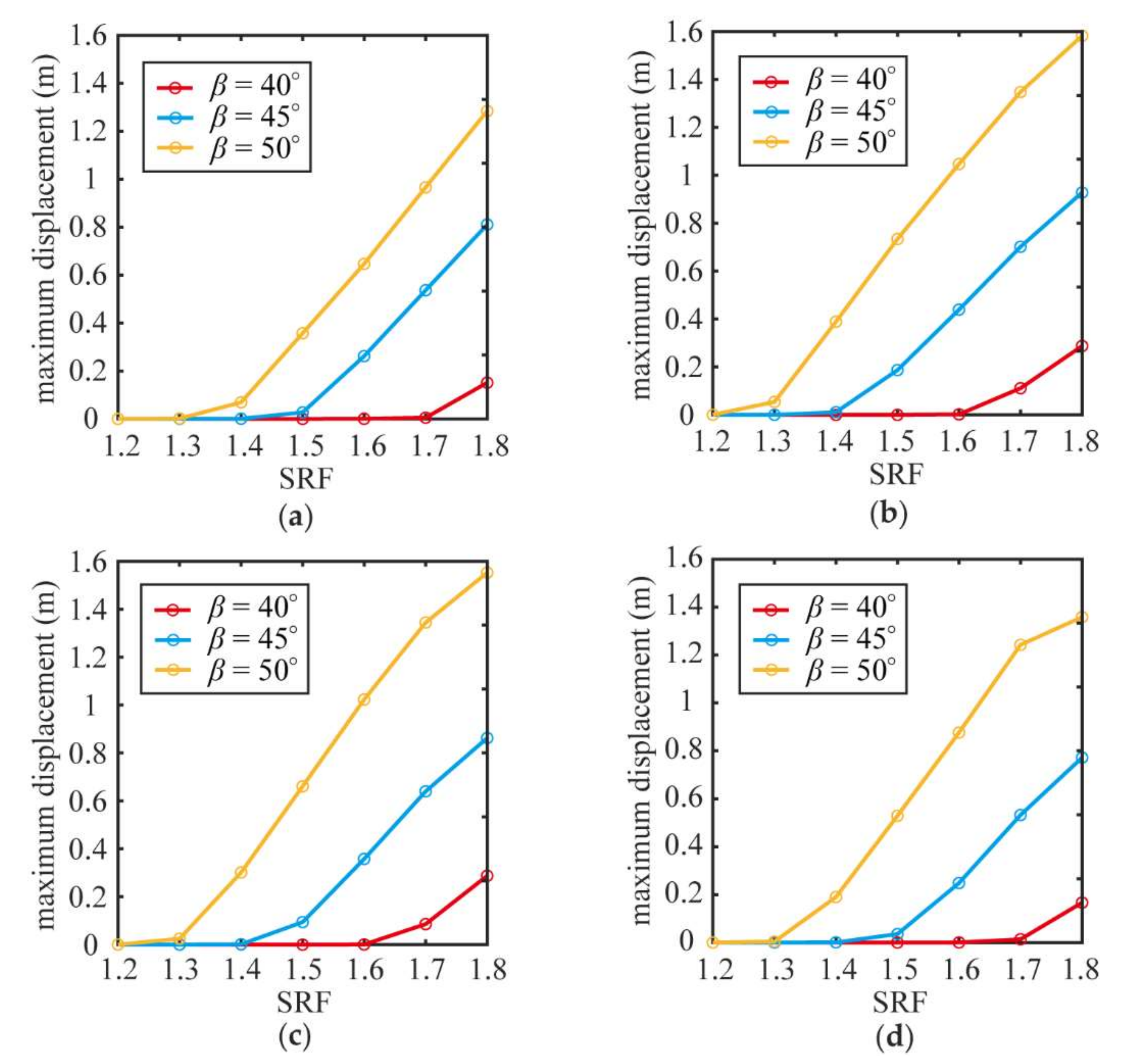
3.4. Effects of the Slope Angle on the Stability of the Vegetated Slopes
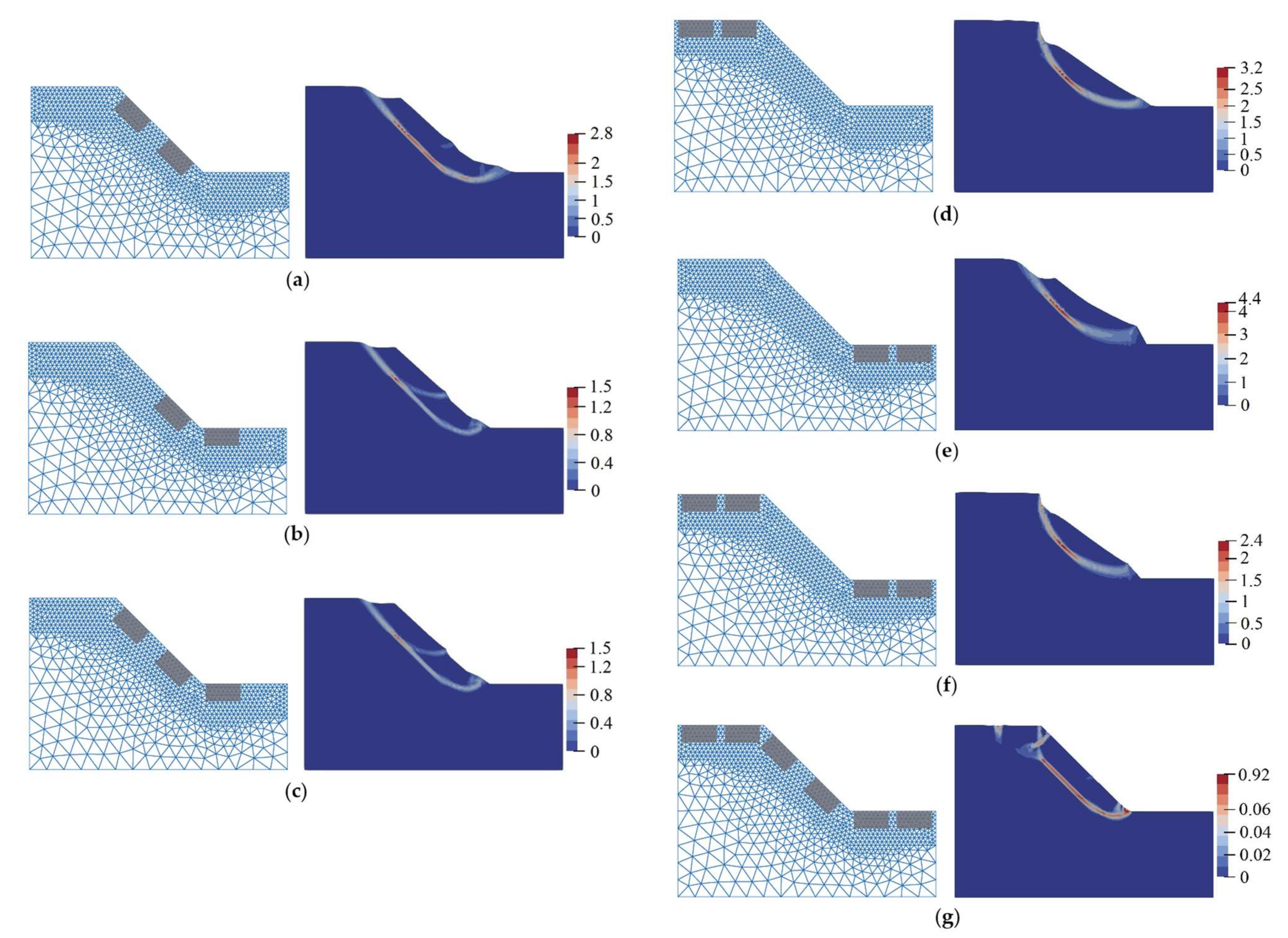
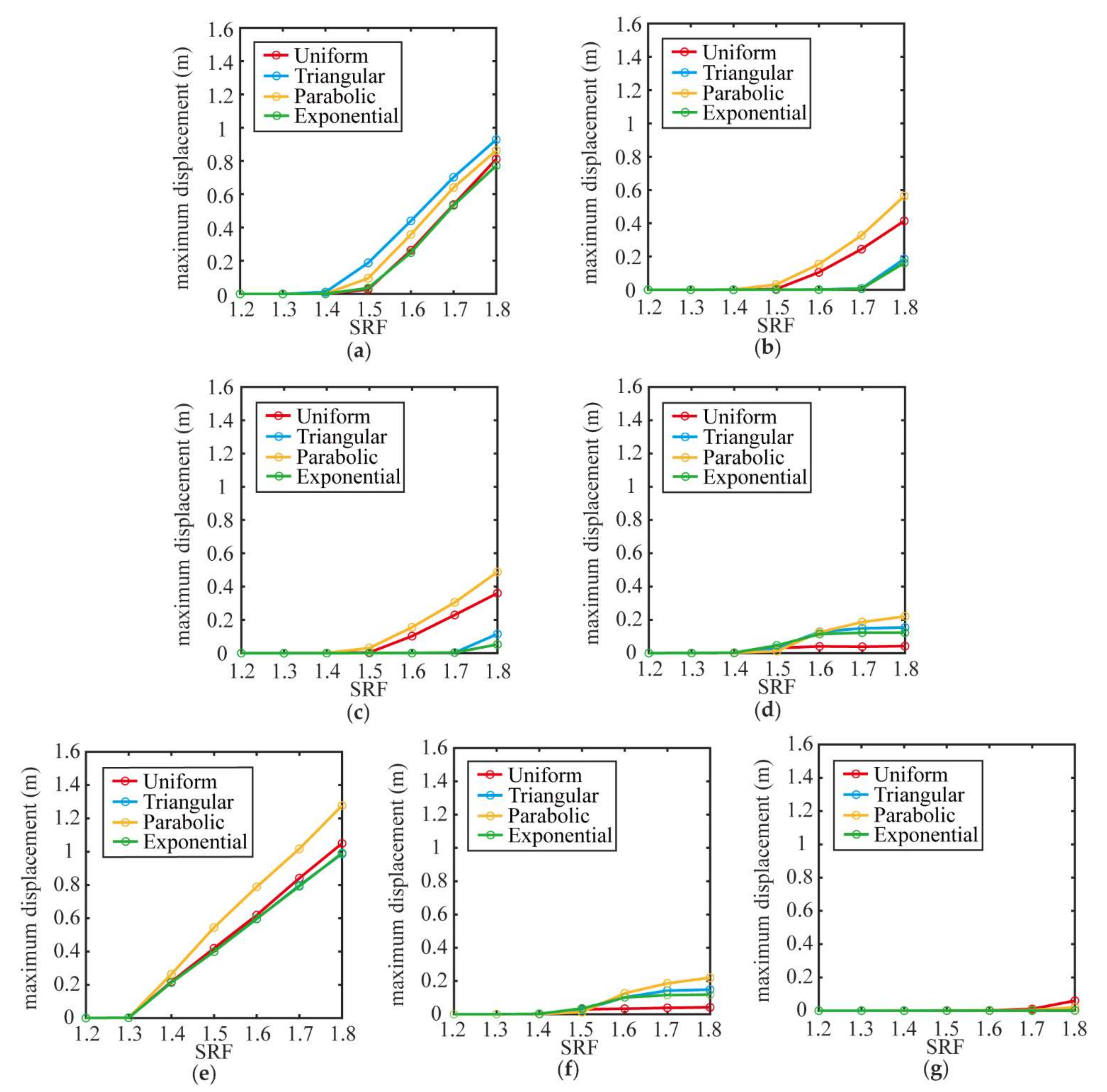
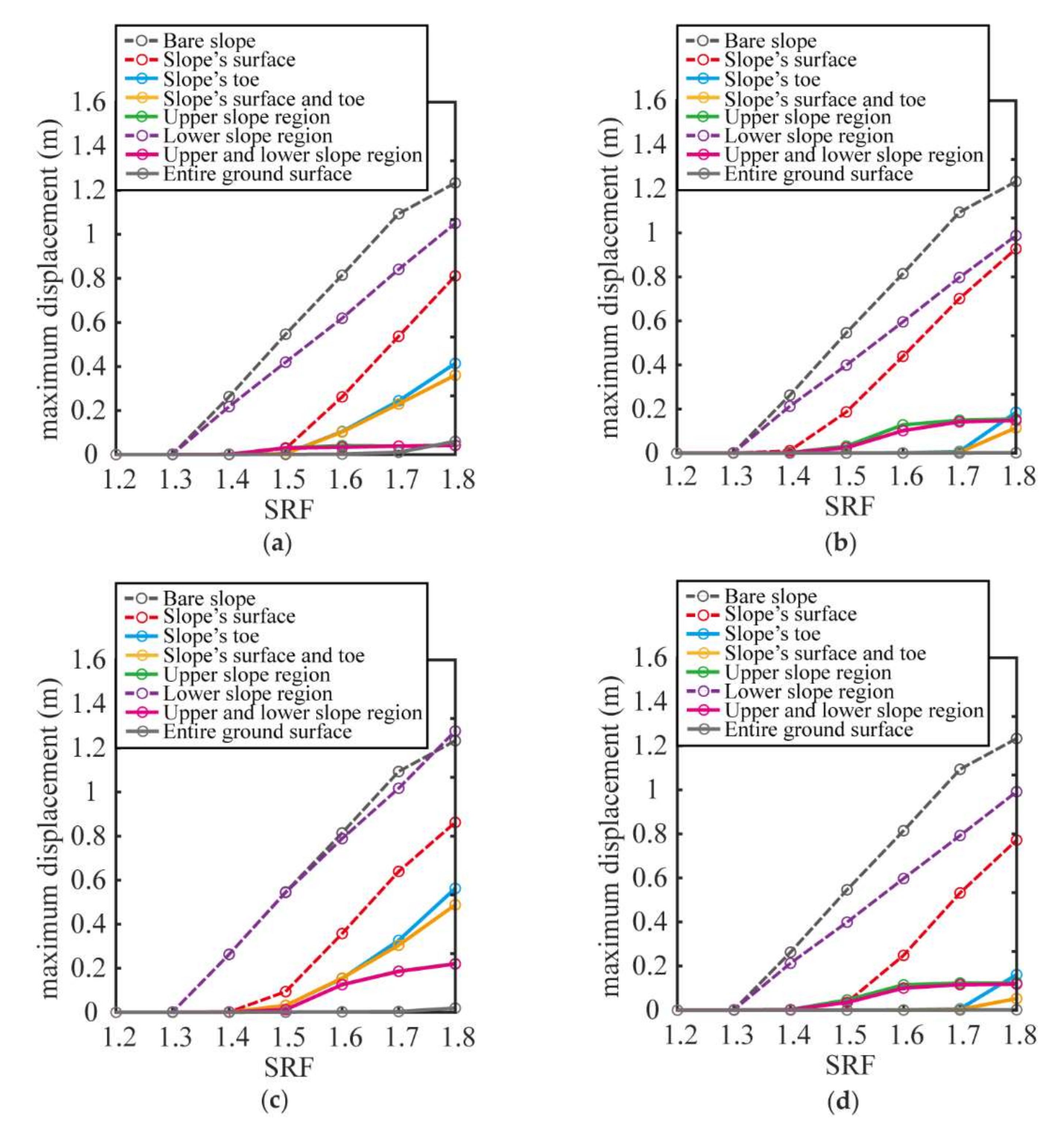
3.5. Influence of the Planting Location on the Stability of the Vegetated Slopes
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Heaphy, M.J.; Lowe, D.J.; Palmer, D.J.; Jones, H.S.; Gielen, G.J.H.P.; Oliver, G.R.; Pearce, S.H. Assessing drivers of plantation forest productivity on eroded and non-eroded soils in hilly land, eastern North Island, New Zealand. N. Z. J. For. Sci. 2014, 44, 24. [Google Scholar] [CrossRef]
- Schwarz, M.; Phillips, C.; Marden, M.; McIvor, I.R.; Douglas, G.B.; Watson, A. Modelling of root reinforcement and erosion control by ‘Veronese’poplar on pastoral hill country in New Zealand. N. Z. J. For. Sci. 2016, 46, 4. [Google Scholar] [CrossRef]
- Rees, S.W.; Ali, N. Tree induced soil suction and slope stability. Geomech. Geoengin. 2012, 7, 103–113. [Google Scholar] [CrossRef]
- Liu, H.W.; Feng, S.; Ng, C.W.W. Analytical analysis of hydraulic effect of vegetation on shallow slope stability with different root architectures. Comput. Geotech. 2016, 80, 115–120. [Google Scholar] [CrossRef]
- Montgomery, D.R.; Schmidt, K.M.; Greenberg, H.M.; Dietrich, W.E. Forest clearing and regional landsliding. Geology 2000, 28, 311–314. [Google Scholar] [CrossRef]
- Osman, N.; Barakbah, S.S. Parameters to predict slope stability—soil water and root profiles. Ecol. Eng. 2006, 28, 90–95. [Google Scholar] [CrossRef]
- Ni, J.; Leung, A.K.; Ng, C.W.W. Unsaturated hydraulic properties of vegetated soil under single and mixed planting conditions. Géotechnique 2019, 69, 554–559. [Google Scholar] [CrossRef]
- Stokes, A.; Atger, C.; Bengough, A.G.; Fourcaud, T.; Sidle, R.C. Desirable plant root traits for protecting natural and engineered slopes against landslides. Plant Soil 2009, 324, 1–30. [Google Scholar] [CrossRef]
- Schwarz, M.; Preti, F.; Giadrossich, F.; Lehmann, P.; Or, D. Quantifying the role of vegetation in slope stability: A case study in Tuscany (Italy). Ecol. Eng. 2010, 36, 285–291. [Google Scholar] [CrossRef]
- Ghestem, M.; Sidle, R.C.; Stokes, A. The influence of plant root systems on subsurface flow: Implications for slope stability. Bioscience 2011, 61, 869–879. [Google Scholar] [CrossRef]
- Wu, T.H. Root reinforcement of soil: Review of analytical models, test results, and applications to design. Can. Geotech. J. 2013, 50, 259–274. [Google Scholar] [CrossRef]
- Hawley, J.G.; Dymond, J.R. How much do trees reduce landsliding? J. Soil Water Conserv. 1988, 43, 495–498. [Google Scholar]
- Dymond, J.R.; Ausseil, A.-G.; Shepherd, J.D.; Buettner, L. Validation of a region-wide model of landslide susceptibility in the Manawatu–Wanganui region of New Zealand. Geomorphology 2006, 74, 70–79. [Google Scholar] [CrossRef]
- Abe, K.; Iwamoto, M. Preliminary experiment on shear in soil layers with a large-direct-shear apparatus. J. Jpn. For. Soc. 1986, 68, 61–65. [Google Scholar] [CrossRef]
- Docker, B.B.; Hubble, T.C.T. Quantifying the enhanced soil shear strength beneath four riparian tree species. Geomorphology 2008, 100, 400–418. [Google Scholar]
- Waldron, L.J. The shear resistance of root-permeated homogeneous and stratified soil. Soil Sci. Soc. Am. J. 1977, 41, 843–849. [Google Scholar] [CrossRef]
- Waldron, L.J.; Dakessian, S. Effect of grass, legume, and tree roots on soil shearing resistance. Soil Sci. Soc. Am. J. 1982, 46, 894–899. [Google Scholar] [CrossRef]
- Gray, D.H.; Ohashi, H. Mechanics of fiber reinforcement in sand. J. Geotech. Eng. 1983, 109, 335–353. [Google Scholar] [CrossRef]
- Jewell, R.A.; Wroth, C.P. Direct shear tests on reinforced sand. Geotechnique 1987, 37, 53–68. [Google Scholar] [CrossRef]
- Wu, T.H.; McOmber, R.M.; Erb, R.T.; Beal, P.E. Study of soil-root interaction. J. Geotech. Eng. 1988, 114, 1351–1375. [Google Scholar] [CrossRef]
- Frydman, S.; Operstein, V. Numerical simulation of direct shear of rootreinforced soil. Proc. Inst. Civ. Eng. Ground Improv. 2001, 5, 41–48. [Google Scholar] [CrossRef]
- Fourcaud, T.; Blaise, F.; Lac, P.; Castéra, P.; De Reffye, P. Numerical modelling of shape regulation and growth stresses in trees. Trees 2003, 17, 31–39. [Google Scholar] [CrossRef]
- Sidle, R.C. A theoretical model of the effects of timber harvesting on slope stability. Water Resour. Res. 1992, 28, 1897–1910. [Google Scholar] [CrossRef]
- Watson, A.; Phillips, C.; Marden, M. Root strength, growth, and rates of decay: Root reinforcement changes of two tree species and their contribution to slope stability. Plant Soil 1999, 217, 39–47. [Google Scholar] [CrossRef]
- Bishop, A.W. The use of the slip circle in the stability analysis of slopes. Geotechnique 1955, 5, 7–17. [Google Scholar] [CrossRef]
- Morgenstern, N.R.; Price, V.E. The analysis of the stability of general slip surfaces. Geotechnique 1965, 15, 79–93. [Google Scholar] [CrossRef]
- Zienkiewicz, O.C.; Humpheson, C.; Lewis, R.W. Associated and non-associated visco-plasticity and plasticity in soil mechanics. Geotechnique 1975, 25, 671–689. [Google Scholar] [CrossRef]
- Griffiths, D.V.; Lane, P.A. Slope stability analysis by finite elements. Geotechnique 1999, 49, 387–403. [Google Scholar] [CrossRef]
- Chok, Y.H.; Jaksa, M.B.; Kaggwa, W.S.; Griffiths, D.V. Assessing the influence of root reinforcement on slope stability by finite elements. Int. J. Geo-Eng. 2015, 6, 12. [Google Scholar] [CrossRef]
- Zhang, W.; Yuan, W.; Dai, B. Smoothed particle finite-element method for large-deformation problems in geomechanics. Int. J. Geomech. 2018, 18, 04018010. [Google Scholar] [CrossRef]
- Gray, D.H.; Barker, D. Root-soil mechanics and interactions. Riparian Veg. Fluv. Geomorphol. 2004, 8, 113–123. [Google Scholar] [CrossRef]
- Yuan, W.-H.; Liu, K.; Zhang, W.; Dai, B.; Wang, Y. Dynamic modeling of large deformation slope failure using smoothed particle finite element method. Landslides 2020, 17, 1591–1603. [Google Scholar] [CrossRef]
- Yin, Z.-Y.; Jin, Y.-F.; Zhang, X. Large deformation analysis in geohazards and geotechnics. J. Zhejiang Univ. A 2021, 22, 851–855. [Google Scholar] [CrossRef]
- Peng, C.; Zhan, L.; Wu, W.; Zhang, B. A fully resolved SPH-DEM method for heterogeneous suspensions with arbitrary particle shape. Powder Technol. 2021, 387, 509–526. [Google Scholar] [CrossRef]
- Zhan, L.; Peng, C.; Zhang, B.; Wu, W. A surface mesh represented discrete element method (SMR-DEM) for particles of arbitrary shape. Powder Technol. 2021, 377, 760–779. [Google Scholar] [CrossRef]
- Bui, H.H.; Fukagawa, R.; Sako, K.; Ohno, S. Lagrangian meshfree particles method (SPH) for large deformation and failure flows of geomaterial using elastic–plastic soil constitutive model. Int. J. Numer. Anal. Methods Geomech. 2008, 32, 1537–1570. [Google Scholar] [CrossRef]
- Lin, J.; Naceur, H.; Coutellier, D.; Laksimi, A. Geometrically nonlinear analysis of two-dimensional structures using an improved smoothed particle hydrodynamics method. Eng. Comput. 2015, 32, 779–805. [Google Scholar] [CrossRef]
- Abe, K.; Soga, K.; Bandara, S. Material point method for coupled hydromechanical problems. J. Geotech. Geoenviron. Eng. 2014, 140, 04013033. [Google Scholar] [CrossRef]
- Soga, K.; Alonso, E.; Yerro, A.; Kumar, K.; Bandara, S. Trends in large-deformation analysis of landslide mass movements with particular emphasis on the material point method. Géotechnique 2016, 66, 248–273. [Google Scholar] [CrossRef]
- Oñate, E.; Idelsohn, S.R.; Del Pin, F.; Aubry, R. The particle finite element method—an overview. Int. J. Comput. Methods 2004, 1, 267–307. [Google Scholar] [CrossRef]
- Monforte, L.; Arroyo, M.; Carbonell, J.M.; Gens, A. Numerical simulation of undrained insertion problems in geotechnical engineering with the Particle Finite Element Method (PFEM). Comput. Geotech. 2017, 82, 144–156. [Google Scholar] [CrossRef]
- Yuan, W.-H.; Wang, B.; Zhang, W.; Jiang, Q.; Feng, X.-T. Development of an explicit smoothed particle finite element method for geotechnical applications. Comput. Geotech. 2019, 106, 42–51. [Google Scholar] [CrossRef]
- Zhang, W.; Zhong, Z.-H.; Peng, C.; Yuan, W.-H.; Wu, W. GPU-accelerated smoothed particle finite element method for large deformation analysis in geomechanics. Comput. Geotech. 2021, 129, 103856. [Google Scholar] [CrossRef]
- Jin, Y.F.; Yuan, W.H.; Yin, Z.Y.; Cheng, Y.M. An edge-based strain smoothing particle finite element method for large deformation problems in geotechnical engineering. Int. J. Numer. Anal. Methods Geomech. 2020, 44, 923–941. [Google Scholar] [CrossRef]
- Wang, Z.Y.; Jin, Y.F.; Yin, Z.Y.; Wang, Y.Z. A novel coupled NS-PFEM with stable nodal integration and polynomial pressure projection for geotechnical problems. Int. J. Numer. Anal. Methods Geomech. 2022, 46, 2535–2560. [Google Scholar] [CrossRef]
- Jin, Y.-F.; Yin, Z.-Y.; Zhou, X.-W.; Liu, F.-T. A stable node-based smoothed PFEM for solving geotechnical large deformation 2D problems. Comput. Methods Appl. Mech. Eng. 2021, 387, 114179. [Google Scholar] [CrossRef]
- Jin, Y.-F.; Yin, Z.-Y. Two-phase PFEM with stable nodal integration for large deformation hydromechanical coupled geotechnical problems. Comput. Methods Appl. Mech. Eng. 2022, 392, 114660. [Google Scholar] [CrossRef]
- Meijer, G.J.; Muir Wood, D.; Knappett, J.A.; Bengough, G.A.; Liang, T. Analysis of coupled axial and lateral deformation of roots in soil. Int. J. Numer. Anal. Methods Geomech. 2019, 43, 684–707. [Google Scholar] [CrossRef]
- Zhang, X.; Krabbenhoft, K.; Sheng, D.; Li, W. Numerical simulation of a flow-like landslide using the particle finite element method. Comput. Mech. 2015, 55, 167–177. [Google Scholar] [CrossRef]
- Liu, G.R.; Nguyen-Thoi, T.; Nguyen-Xuan, H.B.; Lam, K.Y. A node-based smoothed finite element method (NS-FEM) for upper bound solutions to solid mechanics problems. Comput. Struct. 2009, 87, 14–26. [Google Scholar] [CrossRef]
- Liu, G.R.; Dai, K.Y.; Nguyen, T.T. A smoothed finite element method for mechanics problems. Comput. Mech. 2007, 39, 859–877. [Google Scholar] [CrossRef]
- Chen, J.S.; Wu, C.T.; Yoon, S.; You, Y. A stabilized conforming nodal integration for Galerkin mesh-free methods. Int. J. Numer. Methods Eng. 2001, 50, 435–466. [Google Scholar] [CrossRef]
- Dong, Y.; Cui, L.; Zhang, X. Multiple-GPU parallelization of three-dimensional material point method based on single-root complex. Int. J. Numer. Meth. Engng. 2022, 123, 1481–1504. [Google Scholar] [CrossRef]
- Fan, N.; Jiang, J.; Dong, Y.; Guo, L.; Song, L. Approach for evaluating instantaneous impact forces during submarine slide-pipeline interaction considering the inertial action. Ocean Eng. 2022, 245, 110466. [Google Scholar] [CrossRef]
- Yuan, W.-H.; Liu, M.; Zhang, X.-W.; Wang, H.-L.; Zhang, W.; Wu, W. Stabilized smoothed particle finite element method for coupled large deformation problems in geotechnics. Acta Geotech. 2022, 18, 04018010. [Google Scholar] [CrossRef]
- Yuan, W.-H.; Zhu, J.-X.; Liu, K.; Zhang, W.; Dai, B.-B.; Wang, Y. Dynamic analysis of large deformation problems in saturated porous media by smoothed particle finite element method. Comput. Methods Appl. Mech. Engrg. 2022, 392, 114724. [Google Scholar] [CrossRef]
- Feng, S.; Liu, H.W.; Ng, C.W.W. Analytical analysis of the mechanical and hydrological effects of vegetation on shallow slope stability. Comput. Geotech. 2020, 118, 103335. [Google Scholar] [CrossRef]
- Schmidt, K.M.; Roering, J.J.; Stock, J.D.; Dietrich, W.E.; Montgomery, D.R.; Schaub, T. The variability of root cohesion as an influence on shallow landslide susceptibility in the Oregon Coast Range. Can. Geotech. J. 2001, 38, 995–1024. [Google Scholar] [CrossRef]
- Kokutse, N.K.; Temgoua, A.G.T.; Kavazović, Z. Slope stability and vegetation: Conceptual and numerical investigation of mechanical effects. Ecol. Eng. 2016, 86, 146–153. [Google Scholar] [CrossRef]
- Wu, T.H.; McKinnell, W.P., III; Swanston, D.N. Strength of tree roots and landslides on Prince of Wales Island, Alaska. Can. Geotech. J. 1979, 16, 19–33. [Google Scholar] [CrossRef]
- Pollen-Bankhead, N.; Simon, A. Enhanced application of root-reinforcement algorithms for bank-stability modeling. Earth Surf. Processes Landf. 2009, 34, 471–480. [Google Scholar] [CrossRef]
- Preti, F.; Schwarz, M. On root reinforcement modelling. Geophys. Res. Abstr. 2006, 8, 04555. [Google Scholar]
- Ni, J.J.; Leung, A.K.; Ng, C.W.W.; So, P.S. Investigation of plant growth and transpiration-induced matric suction under mixed grass–tree conditions. Can. Geotech. J. 2017, 54, 561–573. [Google Scholar] [CrossRef] [Green Version]
- Karimzadeh, A.A.; Leung, A.K.; Hosseinpour, S.; Wu, Z.; Fardad Amini, P. Monotonic and cyclic behaviour of root-reinforced sand. Can. Geotech. J. 2021, 99, 1915–1927. [Google Scholar] [CrossRef]
- Fredlund, D.G.; Rahardjo, H. Soil Mechanics for Unsaturated Soils; John Wiley & Sons: Hoboken, NJ, USA, 1993. [Google Scholar]
- Garg, A.; Leung, A.K.; Ng, C.W.W. Comparisons of soil suction induced by evapotranspiration and transpiration of S. heptaphylla. Can. Geotech. J. 2015, 52, 2149–2155. [Google Scholar] [CrossRef]
- Cohen, D.; Schwarz, M.; Or, D. An analytical fiber bundle model for pullout mechanics of root bundles. J. Geophys. Res. Earth Surf. 2011, 116, F03010. [Google Scholar] [CrossRef]
- Lynch, J. Root architecture and plant productivity. Plant Physiol. 1995, 109, 7. [Google Scholar] [CrossRef]
- Leung, A.K.; Garg, A.; Coo, J.L.; Ng, C.W.W.; Hau, B.C.H. Effects of the roots of Cynodon dactylon and Schefflera heptaphylla on water infiltration rate and soil hydraulic conductivity. Hydrol. Processes 2015, 29, 3342–3354. [Google Scholar] [CrossRef]
- Pernek, M.; Lacković, N.; Lukić, I.; Zorić, N.; Matošević, D. Outbreak of Orthotomicus erosus (Coleoptera, Curculionidae) on Aleppo pine in the Mediterranean region in Croatia. South-East Eur. For. SEEFOR 2019, 10, 19–27. [Google Scholar] [CrossRef]
- Ciosek, M.T.; Piórek, K.; Sikorski, R.; Trebicka, A. Population dynamics of Pulsatilla patens (L.) Mill. in a new locality in Poland. Biodivers. Res. Conserv. 2016, 41, 61. [Google Scholar] [CrossRef]
- Dundas, I.S.; Nair, R.M.; Verlin, D.C. First report of meiotic chromosome number and karyotype analysis of an accession of Trigonella balansae (Leguminosae). N. Z. J. Agric. Res. 2006, 49, 55–58. [Google Scholar] [CrossRef]
- Shabi, M.M.; Raj, C.D.; Sasikala, C.; Gayathri, K.; Joseph, J. Negative inotropic and chronotropic effects of phenolic fraction from Cynodon dactylon (Linn) on isolated perfused frog heart. J. Sci. Res. 2012, 4, 657–663. [Google Scholar] [CrossRef]
- Huntley, B.; Bartlein, P.J.; Prentice, I.C. Climatic control of the distribution and abundance of beech (Fagus L.) in Europe and North America. J. Biogeogr. 1989, 16, 551–560. [Google Scholar] [CrossRef]
- Haavik, L.J.; Billings, S.A.; Guldin, J.M.; Stephen, F.M. Emergent insects, pathogens and drought shape changing patterns in oak decline in North America and Europe. For. Ecol. Manag. 2015, 354, 190–205. [Google Scholar] [CrossRef]
- Zhu, H.; Zhang, L.M.; Garg, A. Investigating plant transpiration-induced soil suction affected by root morphology and root depth. Comput. Geotech. 2018, 103, 26–31. [Google Scholar] [CrossRef]
- Liang, Y.; Chandra, B.; Soga, K. Shear band evolution and post-failure simulation by the extended material point method (XMPM) with localization detection and frictional self-contact. Comput. Methods Appl. Mech. Eng. 2022, 390, 114530. [Google Scholar] [CrossRef]
- Arnone, E.; Caracciolo, D.; Noto, L.V.; Preti, F.; Bras, R.L. Modeling the hydrological and mechanical effect of roots on shallow landslides. Water Resour. Res. 2016, 52, 8590–8612. [Google Scholar] [CrossRef]
- Schwarz, M.; Cohen, D.; Or, D. Spatial characterization of root reinforcement at stand scale: Theory and case study. Geomorphology 2012, 171, 190–200. [Google Scholar] [CrossRef]
- Schwarz, M.; Rist, A.; Cohen, D.; Giadrossich, F.; Egorov, P.; Büttner, D.; Stolz, M.; Thormann, J.J. Root reinforcement of soils under compression. J. Geophys. Res. Earth Surf. 2015, 120, 2103–2120. [Google Scholar] [CrossRef] [Green Version]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Root Architectures | Characteristics | Typical Species | Growing Regions |
|---|---|---|---|
| Uniform distribution | A root system with a large taproot and large horizontal lateral roots | Aleppo pine [10] | Mediterranean, Southern Europe, Asia, and North Africa [70] |
| Pulsatilla pratensis [68] | Sub-polar areas of Europe, Asia, North America Central, and Eastern Europe [71] | ||
| Triangular distribution | A root taproot system with small lateral roots | Trigonella balansae [68] | Europe, and Asia [72] |
| Parabolic distribution | A concentrated root system | Cynodon dactylon [69] | North Africa, Asia, Australia, and Southern Europe [73] |
| Exponential distribution | A plate-shaped root system | Beech and Mature oaks [10] | Europe, and North America [74,75] |
| Material | Unit Weight (kN/m3) | Young’s Modulus E/MPa | Poisson’s Ratio | Cohesion /kPa | Friction Angle (°) |
|---|---|---|---|---|---|
| Bedrock | 21 | 100 | 0.3 | 30 | 35 |
| Soil | 20 | 60 | 0.3 | 10 | 20 |
| Root zone | 20 | 60 | 0.3 | 53.2 | 20 |
| Overlapping root zone | 20 | 60 | 0.3 | 96.4 | 20 |
| Slope Angle | 40° | 45° | 50° |
|---|---|---|---|
| Number of elements | 1695 | 1744 | 1863 |
| Number of nodes (particles) | 3498 | 3599 | 3842 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, X.; Zhang, W.; Wang, X.; Jin, Y.; Cong, P. Numerical Analysis of an Explicit Smoothed Particle Finite Element Method on Shallow Vegetated Slope Stability with Different Root Architectures. Sustainability 2022, 14, 11272. https://doi.org/10.3390/su141811272
Jia X, Zhang W, Wang X, Jin Y, Cong P. Numerical Analysis of an Explicit Smoothed Particle Finite Element Method on Shallow Vegetated Slope Stability with Different Root Architectures. Sustainability. 2022; 14(18):11272. https://doi.org/10.3390/su141811272
Chicago/Turabian StyleJia, Xichun, Wei Zhang, Xinghan Wang, Yuhao Jin, and Peitong Cong. 2022. "Numerical Analysis of an Explicit Smoothed Particle Finite Element Method on Shallow Vegetated Slope Stability with Different Root Architectures" Sustainability 14, no. 18: 11272. https://doi.org/10.3390/su141811272