
Developing a Hybrid Approach Based on Analytical and Metaheuristic Optimization Algorithms for the Optimization of Renewable DG Allocation Considering Various Types of Loads





Abstract
:1. Introduction
- Improved voltages of all busses.
- Decreased power losses.
- Improved security of critical buses.
- Network reinforcement.
- The reduction of the congestion of the distribution system.
- The reduction of operation costs.
- The improvement of system reliability
- Type I: injects only active power, with a unity power factor.
- Type II: injects only reactive power, with zero power factor.
- Type III: injects active and reactive power.
- Type IV: injects active power and consumes reactive power.
2. Problem Formulation
2.1. Load Modelling
- Constant impedance (CZ): the power is proportional to the square of the voltage value.
- Constant current (CI): the power is proportional to the voltage value.
- Constant power (CP): the power does not change with the voltage variation.
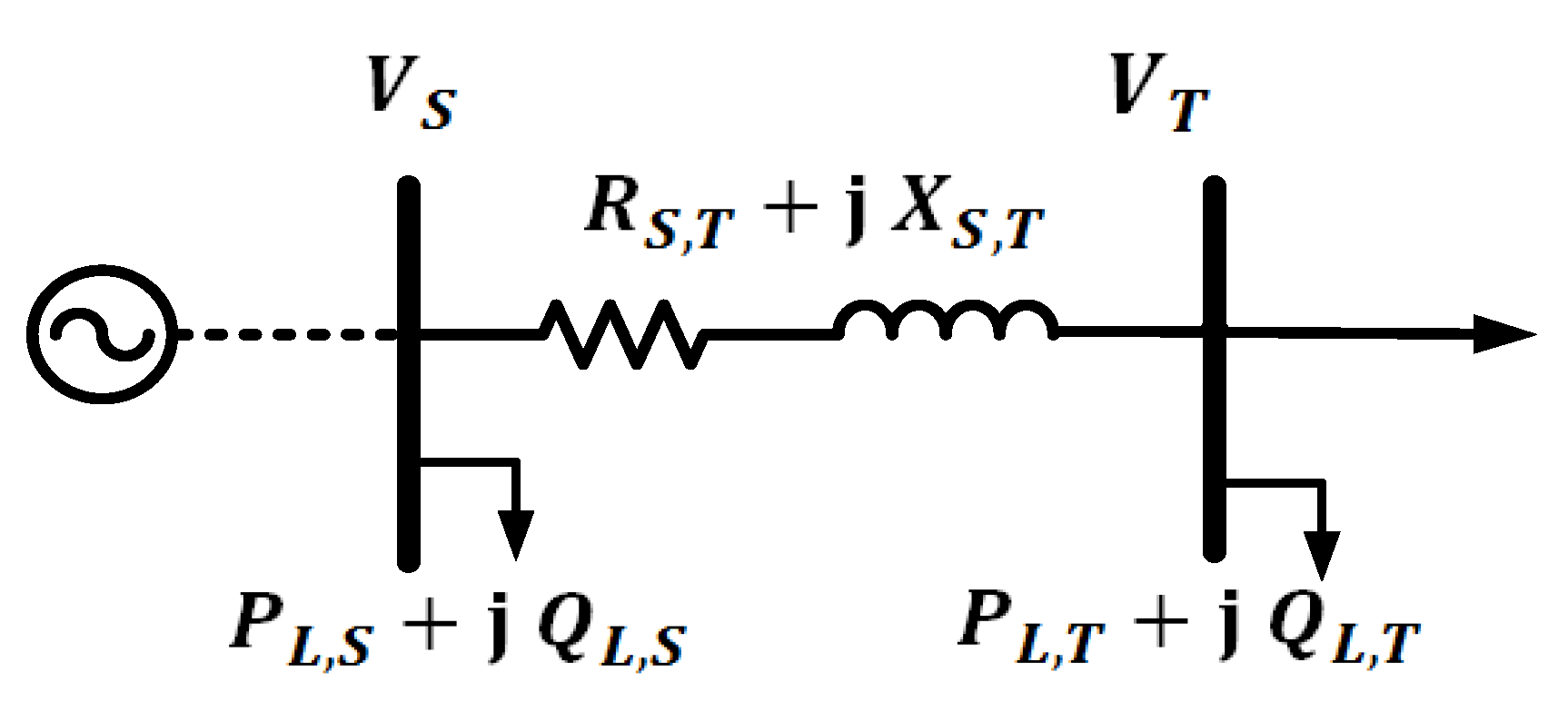
2.2. Forward–Backward Power Flow Algorithm
2.3. Objective Function
2.4. Operation Constraints
2.4.1. Equality Constraints
2.4.2. Inequality Constraints
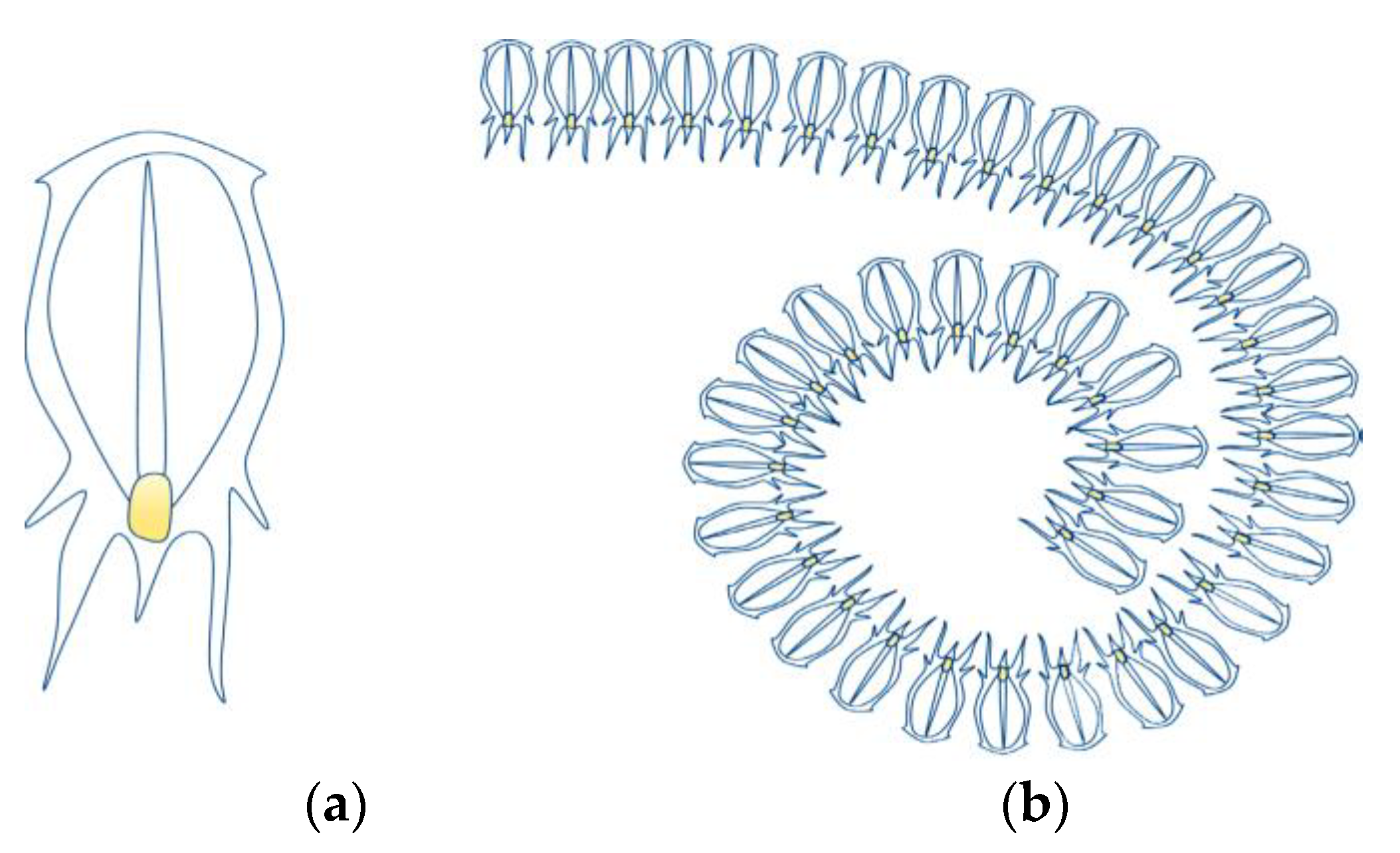
3. Salp Swarm Algorithm (SSA)
- Step 1: specify the input variables of the SSA, which include the search agent, the number of iterations, and the lower and upper variable.
- Step 2: start the population of the SSA randomly, using (20).
- Step 3: run the forward–backward load flow code and determine the fitness function.
- Step 4: calculate the best position according to the optimal fitness function.
- Step 5: update the position of the leader salp according to (16).
- Step 6: update the position of the follower salp according to (19).
- Step 7: verify the limits of the header and follower of the salp chain.
- Step 8: run the forward–backward load flow code in order to determine the fitness function for the positions which updated, then calculate the optimal position.
- Step 9: repeat the previous steps from step 5 to step 8 until the current iteration equals a maximum number of iterations.
- Step 10: finally, find an optimal position represented by the food source and the associated fitness function.
4. Optimal Sizes



- For type I of the DG,
- For type II of the DG,
- For type III of the DG,
5. Results and Discussion
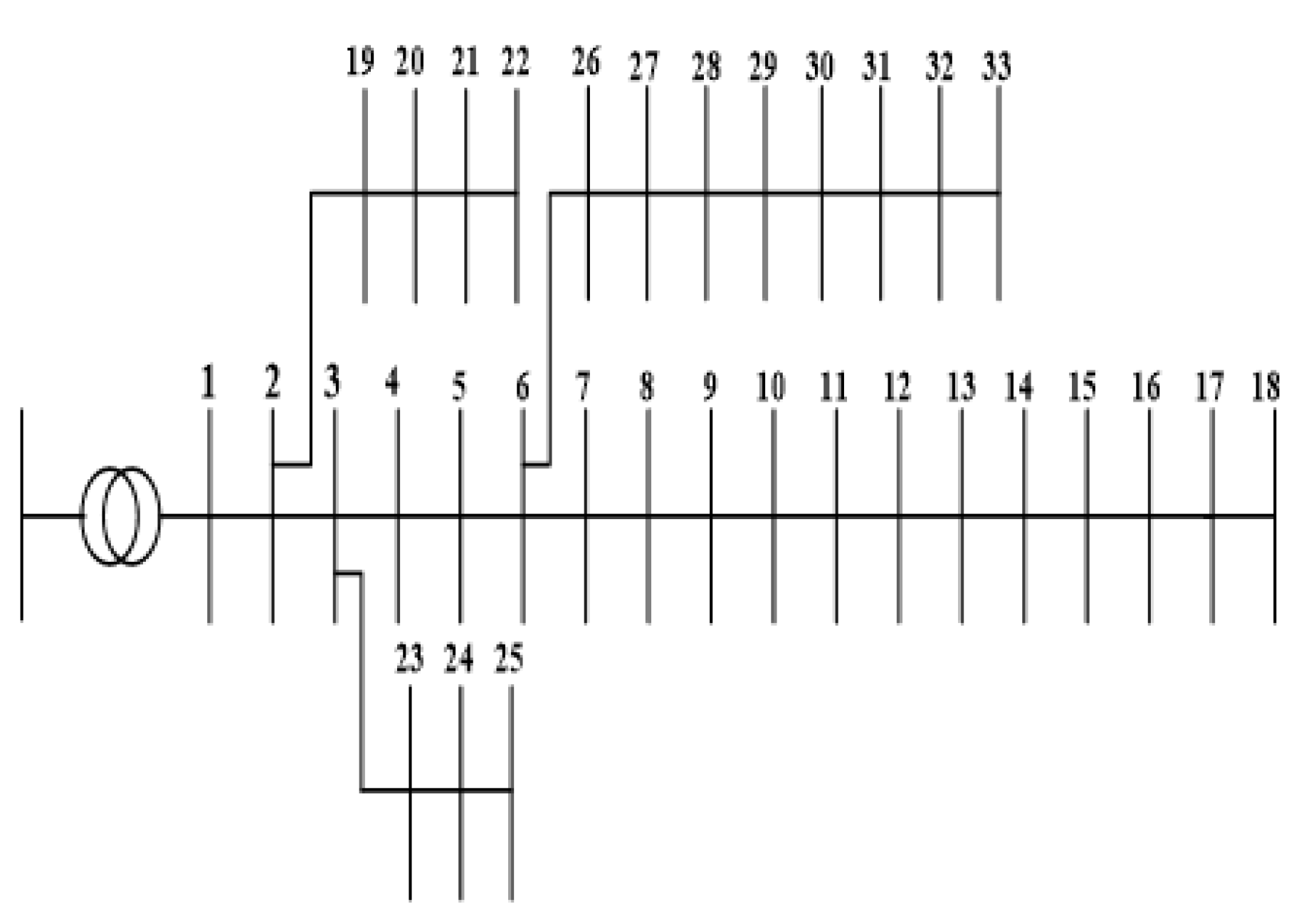
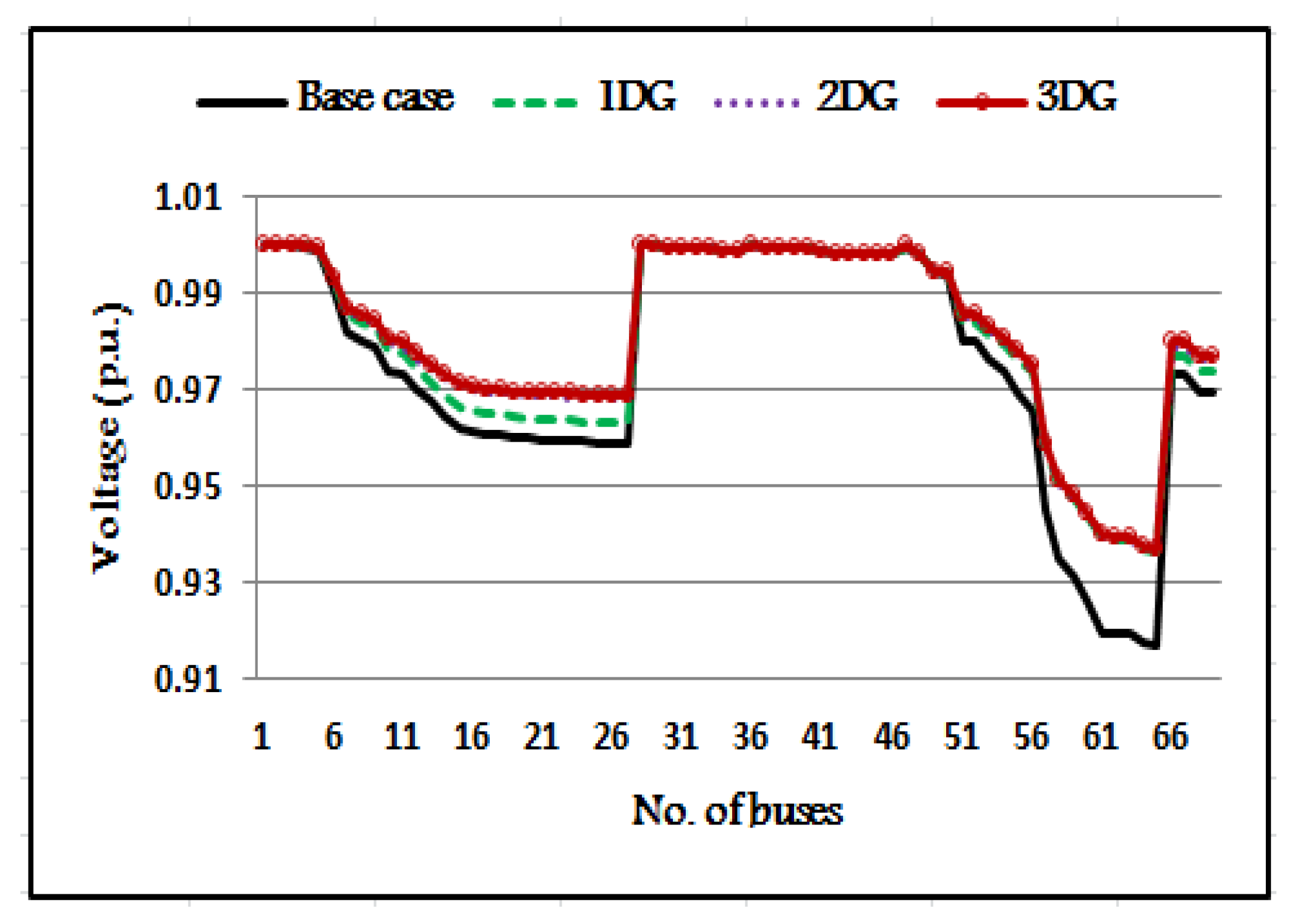
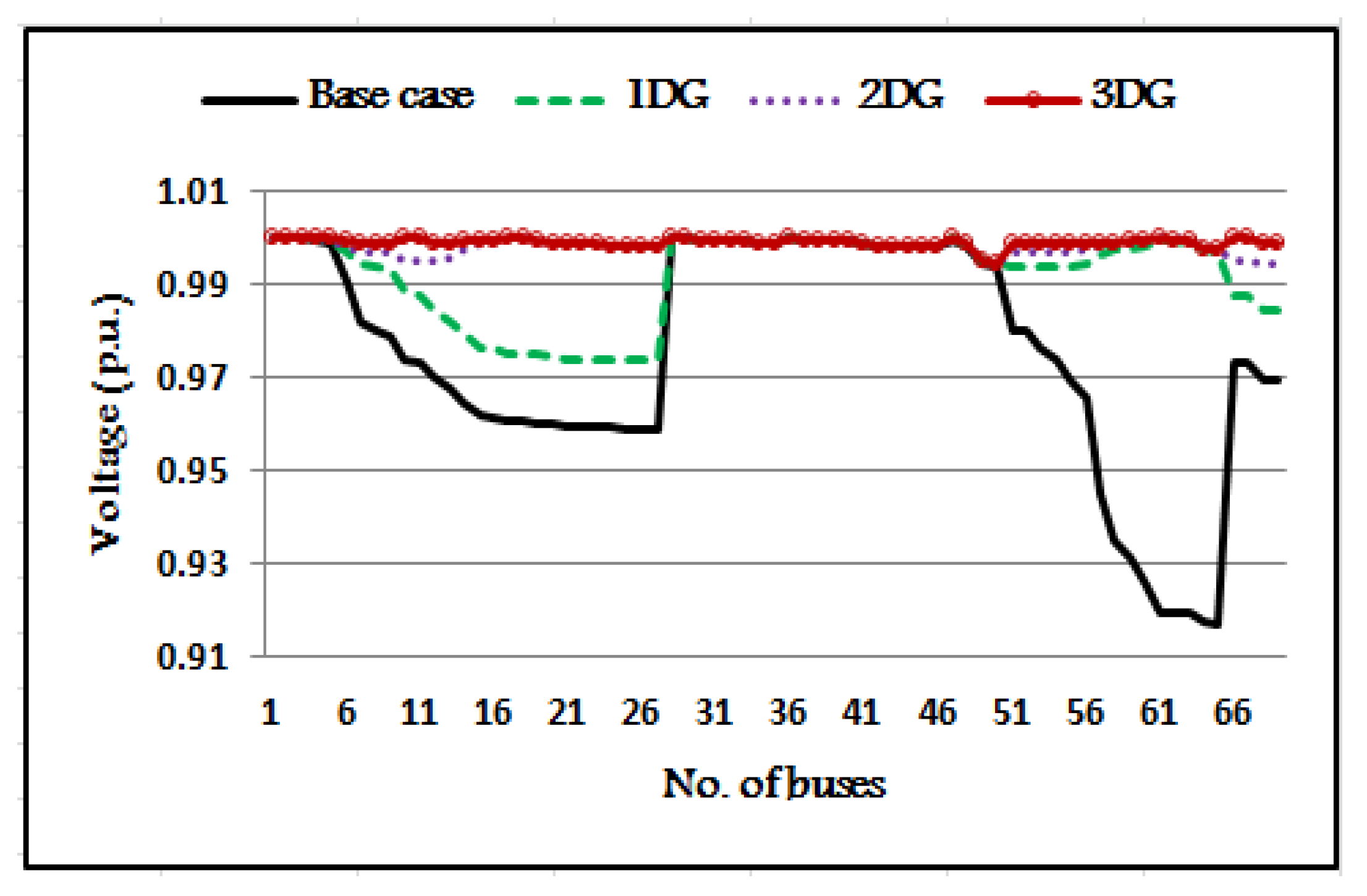
5.1. IEEE 33-Bus Test System
5.1.1. Case1: One DG Integration
5.1.2. Case2: Two DGs Integration
5.1.3. Case 3: Three DGs Integration
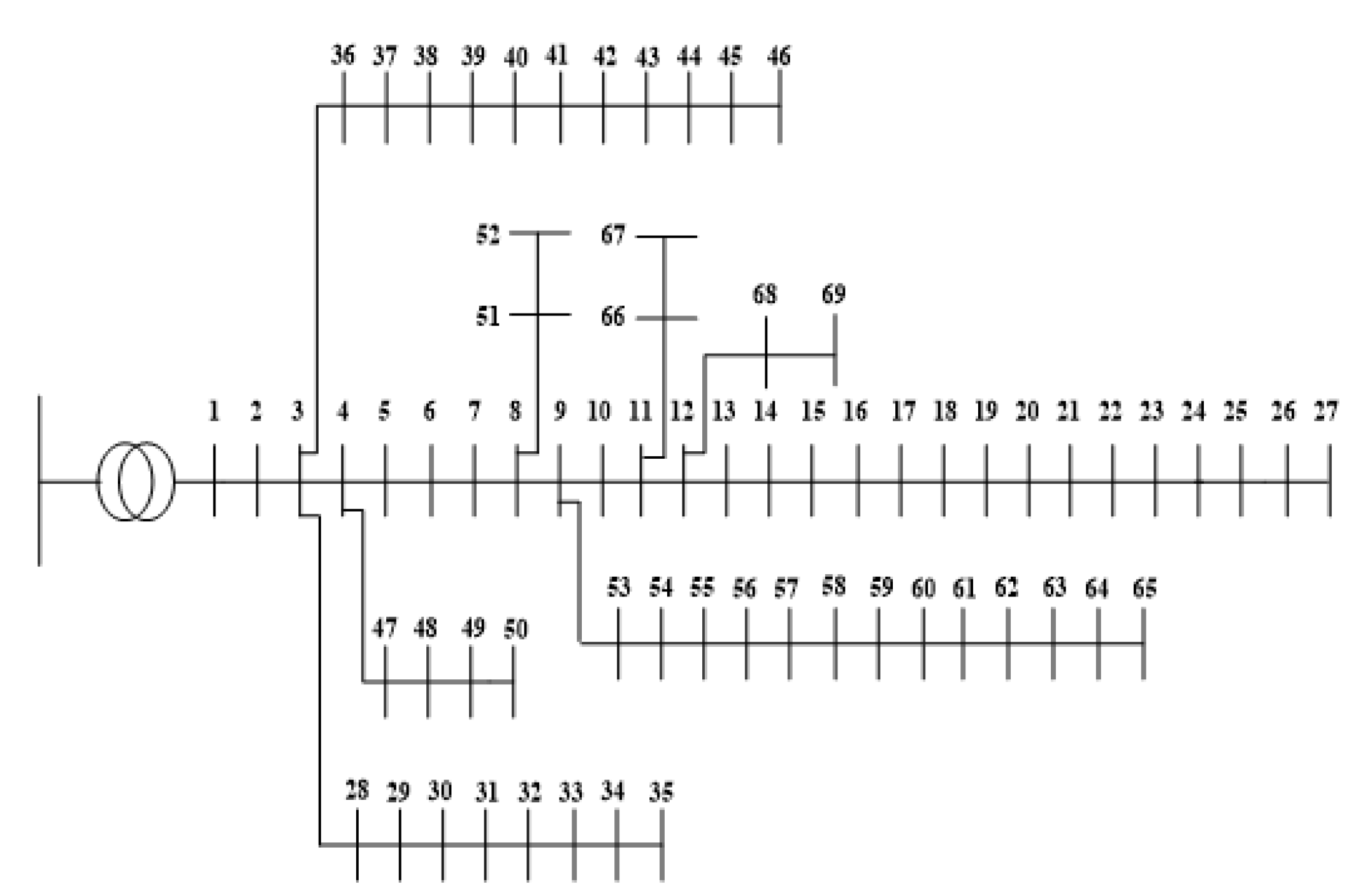
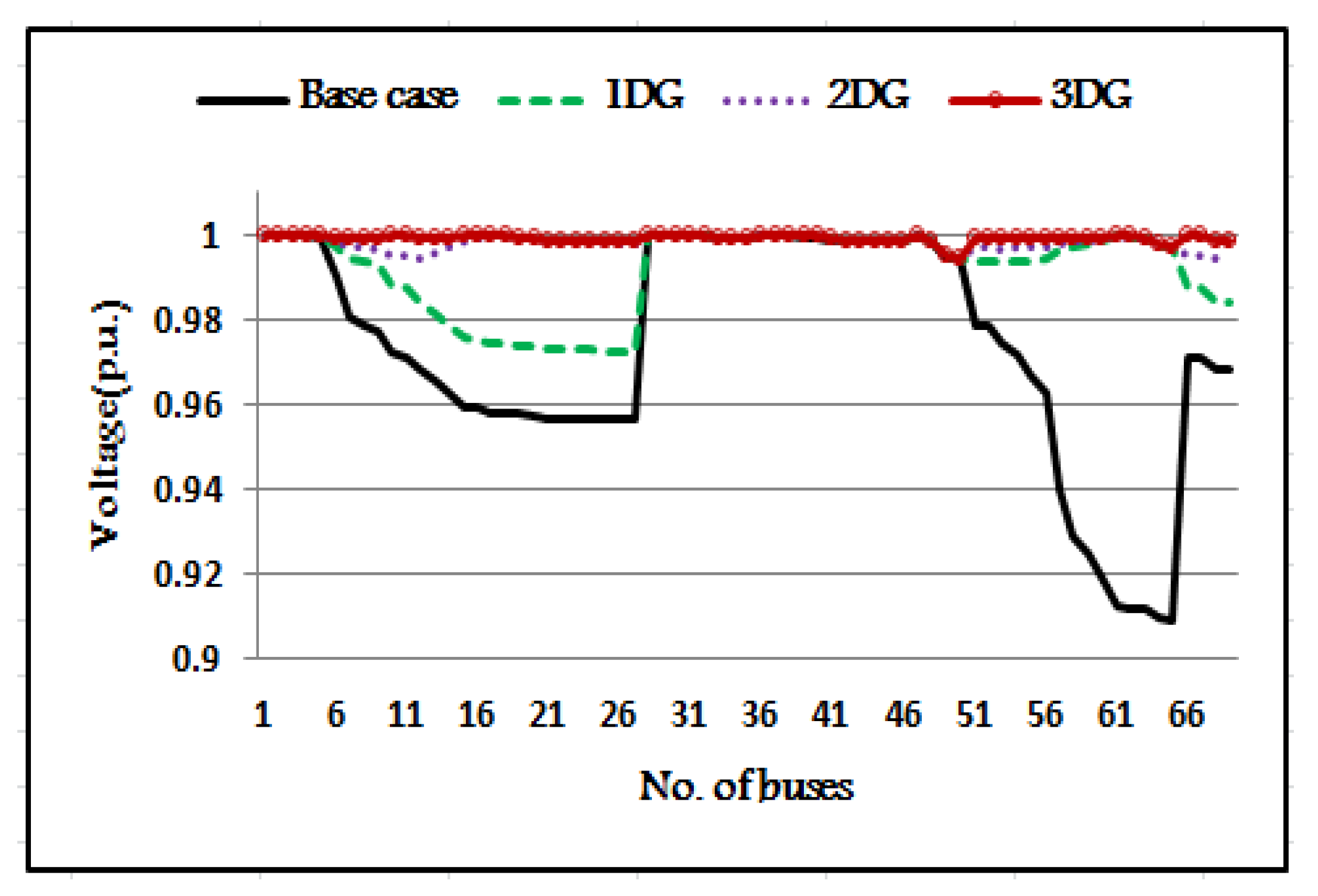
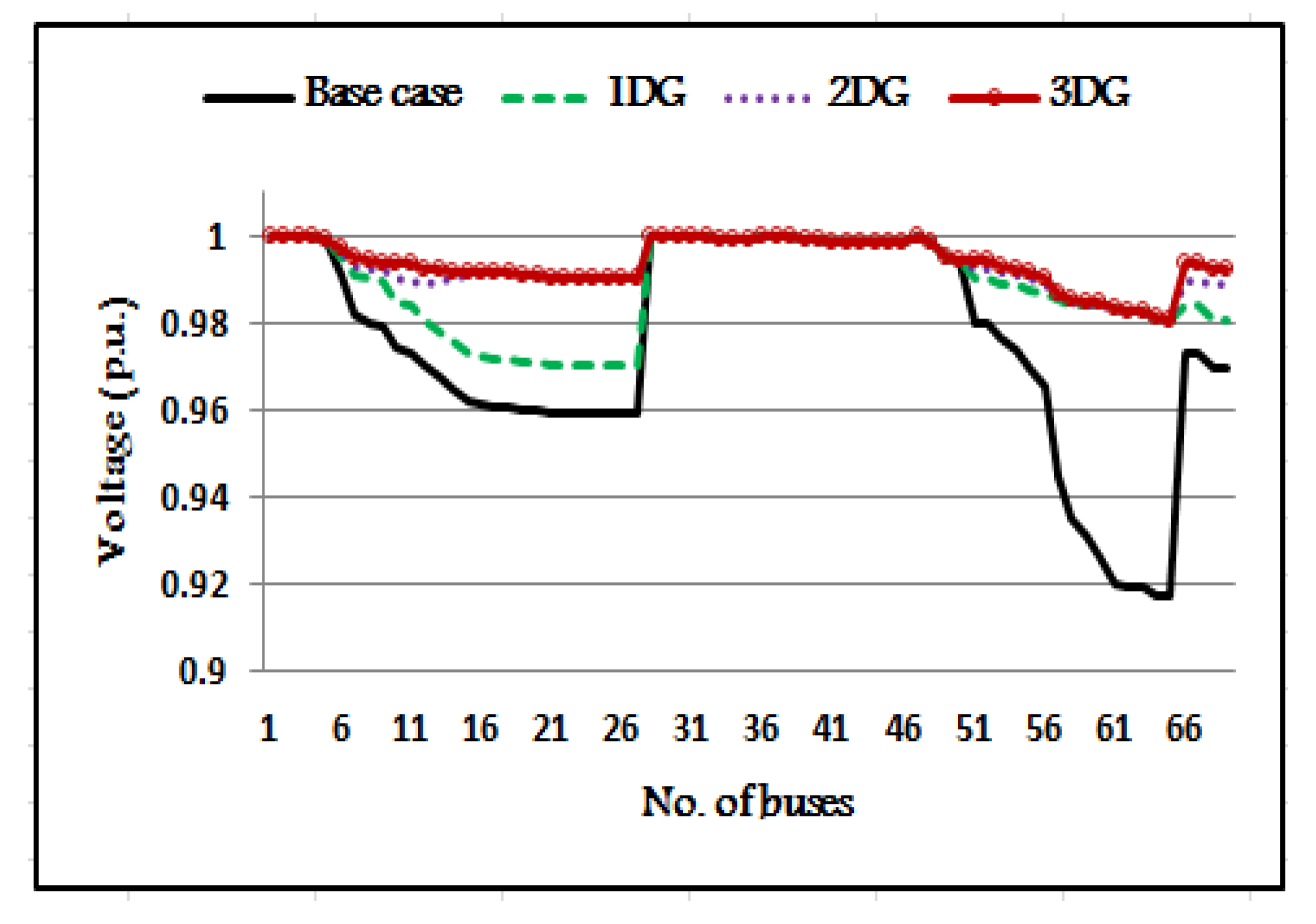
5.2. IEEE 69-Bus Test System
5.2.1. Case1: One DG Integration
5.2.2. Case2: Two DGs Integration
5.2.3. Case 3: Three DG Integration
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Reddy, P.D.P.; Reddy, V.C.V.; Manohar, T.G. Whale optimization algorithm for optimal sizing of renewable resources for loss reduction in distribution systems. Renew. Wind Water Sol. 2017, 4, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Kazerani, M.; Tehrani, K. Grid of Hybrid AC/DC Microgrids: A New Paradigm for Smart City of Tomorrow. In Proceedings of the 2020 IEEE 15th International Conference of System of Systems Engineering (SoSE), Budapest, Hungary, 2–4 June 2020; pp. 175–180. [Google Scholar]
- Kemikem, D.; Boudour, M.; Benabid, R.; Tehrani, K. Quantitative and Qualitative Reliability Assessment of Reparable Electrical Power Supply Systems using Fault Tree Method and Importance Factors. In Proceedings of the 2018 13th Annual Conference on System of Systems Engineering (SoSE), Paris, France, 19–22 June 2018; pp. 452–458. [Google Scholar]
- Singh, R.K.; Goswami, S.K. Optimum allocation of distributed generations based on nodal pricing for profit, loss reduction and voltage improvement including voltage rise issue. Electr. Power Energy Syst. 2010, 32, 637–644. [Google Scholar] [CrossRef]
- Caponetto, R.; Fortuna, L.; Fazzino, S.; Xibilia, M.G. Chaotic sequences to improve the performance evolutionary algorithms. IEEE Trans. Evol. Comput. 2003, 7, 289–304. [Google Scholar] [CrossRef]
- Ali, E.S.; Abd Elazim, S.M.; Abdelaziz, A.Y. Optimal allocation and sizing of renewable distributed generation using ant lion optimization algorithm. Electr. Eng. 2018, 100, 99–109. [Google Scholar] [CrossRef]
- El-Zonkoly, A. Optimal placement of multi-distributed generation units including different load models using particle swarm optimisation. IET Gener. Transm. Distrib. 2011, 5, 760–771. [Google Scholar] [CrossRef]
- Moradi, M.; Abedini, M. A combination of genetic algorithm and particle swarm optimization for optimal DG location and sizing in distribution systems. Int. J. Electr. Power Energy Syst. 2012, 34, 66–74. [Google Scholar] [CrossRef]
- Abu-Mouti, F.S.; El-Hawary, M.E. Optimal distributed generation allocation and sizing in distribution systems via artificial bee colony algorithm. IEEE Trans. Power Deliv. 2011, 26, 2090–2101. [Google Scholar] [CrossRef]
- García, J.A.M.; Mena, A.J.G. Optimal distributed generation location and size using a modified teaching–learning based optimization algorithm. Int. J. Electr. Power Energy Syst. 2013, 50, 65–75. [Google Scholar] [CrossRef]
- Nekooei, K.; Farsangi, M.M.; Nezamabadi-Pour, H.; Lee, K.Y. An improved multi-objective harmony search for optimal placement of DGs in distribution systems. IEEE Trans. Smart Grid 2013, 4, 557–567. [Google Scholar] [CrossRef]
- Kaur, S.; Kumbhar, G.; Sharma, J. A MINLP technique for optimal placement of multiple DG units in distribution systems. Int. J. Electr. Power Energy Syst. 2014, 63, 609–617. [Google Scholar] [CrossRef]
- Hosseini, S.A.; Madahi, S.S.K.; Razavi, F.; Karami, M.; Ghadimi, A.A. Optimal sizing and siting distributed generation resources using a multiobjective algorithm. Turk. J. Electr. Eng. Comput. Sci. 2013, 21, 825–850. [Google Scholar]
- Sultana, U.; Khairuddin, A.B.; Aman, M.; Mokhtar, A.; Zareen, N. A review of optimum DG placement based on minimization of power losses and voltage stability enhancement of distribution system. Renew. Sustain. Energy Rev. 2016, 63, 363–378. [Google Scholar] [CrossRef]
- Singh, A.; Parida, S. Novel sensitivity factors for DG placement based on loss reduction and voltage improvement. Int. J. Electr. Power Energy Syst. 2016, 74, 453–456. [Google Scholar] [CrossRef]
- Prakash, D.B.; Lakshminaraya, C. Optimal siting of capacitors in radial distribution network using whale optimization algorithm. Alex. Eng. J. 2016. [Google Scholar] [CrossRef] [Green Version]
- Khodabakhshian, A.; Andishgar, M.H. Simultaneous Placement and Sizing of DGs and Shunt Capacitors in Distribution Systems by Using IMDE algorithm. Electr. Power Energy Syst. 2016, 82, 599–607. [Google Scholar] [CrossRef]
- Haque, M.H. Load flow-solution of distribution systems with voltage dependent load models. Electr. Power Syst. Res. 1996, 36, 151–156. [Google Scholar] [CrossRef]
- Roy, N.K.; Hossain, M.J.; Pota, H.R. Voltage profile improvement for distributed wind generation using D-STATCOM. In Proceedings of the IEEE PES General Meeting, Detroit, MI, USA, 24–28 July 2011. [Google Scholar]
- Dahal, S.; Mithulananthan, N.; Saha, T. Investigation of small signal stability of a renewable energy based electricity distribution system. In Proceedings of the IEEE PES General Meeting, Minneapolis, MN, USA, 25–29 July 2010. [Google Scholar]
- Mirjalili, S.; Gandomi, A.H.; Mirjalili, S.Z.; Saremi, S.; Faris, H.; Mirjalili, S.M. Salp Swarm Algorithm: A bio-inspired optimizer for engineering design problems. Adv. Eng. Softw. 2017, 114, 163–191. [Google Scholar] [CrossRef]
- Sayed, G.I.; Khoriba, G.; Haggag, M.H. A novel chaotic salp swarm algorithm for global optimization and feature selection. Appl. Intell. 2018, 48, 3462–3481. [Google Scholar] [CrossRef]
- El-Fergany, A.A. Extracting optimal parameters of PEM fuel cells using salp swarm optimizer. Renew. Energy 2018, 119, 641–648. [Google Scholar] [CrossRef]
- Qais, M.H.; Hasanien, H.M.; Alghuwainem, S. Enhanced salp swarm algorithm: Application to variable speed wind generators. Eng. Appl. Artif. Intell. 2019, 80, 82–96. [Google Scholar] [CrossRef]
- El-Fergany, A.A.; Hasanien, H.M. Salp swarm optimizer to solve optimal power flow comprising voltage stability analysis. Neural Comput. Appl. 2019, 32, 5267–5283. [Google Scholar] [CrossRef]
- Moradi, M.H.; Abedinie, M.; Tolabi, H.B. Optimal multi-distributed generation location and capacity by genetic algorithms. In Proceedings of the 2010 Conference Proceedings IPEC, Singapore, 27–29 October 2010; pp. 614–618. [Google Scholar]
- Hung, D.Q.; Mithulananthan, N. Multiple distributed generator placement in primary distribution networks for loss reduction. IEEE Trans. Ind. Electron. 2011, 60, 1700–1708. [Google Scholar] [CrossRef]
- Muthukumar, K.; Jayalalitha, S. Optimal placement and sizing of distributed generators and shunt capacitors for power loss minimization in radial distribution networks using hybrid heuristic search optimization technique. Int. J. Electr. Power Energy Syst. 2016, 78, 299–319. [Google Scholar] [CrossRef]
- Shukla, T.; Singh, S.; Srinivasarao, V.; Naik, K. Optimal sizing of distributed generation placed on radial distribution systems. Electr. Power Compon. Syst. 2010, 38, 260–274. [Google Scholar] [CrossRef]
- Kansal, S.; Kumar, V.; Tyagi, B. Hybrid approach for optimal placement of multiple DGs of multiple types in distribution networks. Int. J. Electr. Power Energy Syst. 2016, 75, 226–235. [Google Scholar] [CrossRef]
- Kumar, A.; Babu, P.V.; Murty, V.V.S.N. Distributed generators allocation in radial distribution systems with load growth using loss sensitivity approach. J. Inst. Eng. (India) Ser. B 2017, 98, 275–287. [Google Scholar] [CrossRef]
- Mahmoud, K.; Yorino, N.; Ahmed, A. Optimal distributed generation allocation in distribution systems for loss minimization. IEEE Trans. Power Syst. 2015, 31, 960–969. [Google Scholar] [CrossRef]



































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Load | CP Type Load | CI Type Load | CZ Type Load | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| DG type | B.C | DG type | B.C | DG type | B.C | DG type | ||||||
| Type-I | Type-II | Type-III | Type-I | Type-II | Type-III | Type-I | Type-II | Type-III | ||||
| Location | 6 | 30 | 30 | 6 | 30 | 6 | 6 | 30 | 6 | |||
| Size | 2.490 | 1.23 | 3.028 | 2.352 | 1.144 | 2.844 | 2.166 | 1.080 | 2.648 | |||
| Total capacity | 2.490 | 1.23 | 3.028 | 2.352 | 1.144 | 2.844 | 2.166 | 1.080 | 2.648 | |||
| Power loss (P.L) | 210.997 | 111.17 | 151.41 | 67.95 | 184.3557 | 96.6 | 133.6 | 63.7 | 159.78 | 86.2 | 115.4 | 52.7 |
| V. min (p.u.) | 0.9038 | 0.9410 | 0.9162 | 0.9570 | 0.9113 | 0.9460 | 0.9226 | 0.9664 | 0.9173 | 0.9491 | 0.9280 | 0.9632 |
| Min voltage bus | (18) | (18) | (18) | (18) | (18) | (18) | (18) | (18) | (18) | (18) | (18) | (18) |
| P.L Reduction% | 47.31 | 28.24 | 67.795 | 47.07 | 26.79 | 65.10 | 46.53 | 28.41 | 67.31 | |||
| Type of Load | CP Type Load | CI Type Load | CZ Type Load | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| DG type | B.C | DG type | B.C | DG type | B.C | DG type | ||||||
| Type-I | Type-II | Type-III | Type-I | Type-II | Type-III | Type-I | Type-II | Type-III | ||||
| Location | 13 30 | 12 30 | 13 30 | 12 30 | 12 30 | 12 30 | 12 30 | 12 30 | 12 30 | |||
| Size | 0.832 1.110 | 0.430 1.044 | 0.920 1.529 | 0.869 1.014 | 0.400 0.971 | 0.962 1.396 | 0.806 0.929 | 0.391 0.911 | 0.9 1.29 | |||
| Total capacity | 1.942 | 1.47 | 2.449 | 1.883 | 1.372 | 2.358 | 1.734 | 1.303 | 2.19 | |||
| Power loss (P.L) | 210.997 | 87.2876 | 141.935 | 28.56 | 184.356 | 77 | 125.6 | 27 | 159.78 | 69.9 | 108 | 24.6 |
| V. min (p.u.) | 0.9038 | 0.9667 | 0.9290 | 0.9801 | 0.9113 | 0.9659 | 0.9344 | 0.9836 | 0.9173 | 0.9675 | 0.9394 | 0.9814 |
| Min voltage bus | (18) | (33) | (18) | (25) | (18) | (18) | (18) | (25) | (18) | (18) | (18) | (25) |
| P.L reduction% | 58.63 | 32.73 | 86.46 | 57.81 | 31.2 | 85.21 | 56.64 | 33.00 | 84.74 | |||
| PF | 0.91 0.72 | - | 0.91 0.72 | 0.90 0.71 | ||||||||
| Type of Load | CP Type Load | CI Type Load | CZ Type Load | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| DG type | B.C | DG type | B.C | DG type | B.C | DG type | ||||||
| Type-I | Type-II | Type-III | Type-I | Type-II | Type-III | Type-I | Type-II | Type-III | ||||
| Location | 13 24 30 | 13 24 30 | 13 24 30 | 13 24 30 | 13 24 30 | 13 24 30 | 13 24 30 | 13 24 30 | 13 24 30 | |||
| Size | 0.79 1.07 1.012 | 0.359 0.52 1.016 | 0.869 1.189 1.425 | 0.725 0.958 1.046 | 0.334 0.490 0.944 | 0.802 1.175 1.337 | 0.672 1.015 0.871 | 0.324 0.490 0.884 | 0.750 1.128 1.234 | |||
| Total capacity | 2.87 | 1.890 | 3.483 | 2.730 | 1.769 | 3.297 | 2.558 | 1.699 | 3.112 | |||
| Power loss (P.L) | 210.997 | 72.89 | 138.37 | 11.77 | 184.3557 | 63.6 | 122.4 | 11.3 | 159.78 | 57 | 104.9 | 9.5 |
| V. min (p.u.) | 0.9038 | 0.9670 | 0.9303 | 0.9905 | 0.9113 | 0.9695 | 0.9356 | 0.9918 | 0.9173 | 0.9713 | 0.9405 | 0.9925 |
| Min voltage bus | (18) | (33) | (18) | (8) | (18) | (33) | (18) | (8) | (18) | (18) | (18) | (8) |
| P.L reduction% | - | 65.45 | 34.42 | 94.42 | 65.15 | 32.93 | 93.81 | 64.64 | 34.92 | 94.11 | ||
| - | ||||||||||||
| PF | 0.91 0.90 0.71 | - | 0.91 0.91 0.71 | 0.90 0.90 0.70 | ||||||||
| Case | Technique | Location Size (MVA) | Total Capacity (MVA) | Power Loss | P.f | V min (p.u.) | Loss Reduction % | |||
|---|---|---|---|---|---|---|---|---|---|---|
| 3DG | Proposed | Bus | 13 | 24 | 30 | 3.483 | 11.77 | 0.91 0.90 0.71 | 0.9905 (8) | 94.42 |
| Size | 0.869 | 1.189 | 1.425 | |||||||
| GA [26] | Bus | 14 | 24 | 30 | 3.407 | 11.91 | 0.90 0.89 0.72 | NA | 94.35 | |
| Size | 0.8153 | 1.102 | 1.49 | |||||||
| IA [27] | Bus | 6 | 30 | 14 | 2.964 | 22.29 | 0.82 0.82 0.82 | 0.99217 (8) | 89.45 | |
| Size | 1.098 | 1.098 | 0.768 | |||||||
| PABC [28] | Bus | 12 | 25 | 30 | 2.889 | 15.91 | 0.85 0.85 0.85 | NA | 92.46 | |
| Size | 1.014 | 0.960 | 1.363 | |||||||
| Type of Load | CP Type Load | CI Type Load | CZ Type Load | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Case | B.C | DG type | B.C | DG type | B.C | DG type | ||||||
| DG type | Type-I | Type-II | Type-III | Type-I | Type-II | Type-III | Type-I | Type-II | Type-III | |||
| Location | 61 | 61 | 61 | 61 | 61 | 61 | 61 | 61 | 61 | |||
| Size | 18.1 | 1.291 | 2.22 | 1.655 | 1.202 | 2.052 | 1.594 | 1.122 | 1.924 | |||
| Total capacity | 18.1 | 1.291 | 2.22 | 1.655 | 1.202 | 2.052 | 1.594 | 1.122 | 1.924 | |||
| Power loss (PL) | 224.997 | 83.37 | 152.09 | 23.15 | 191.5 | 73.87 | 129 | 22 | 167.2 | 66.2 | 115 | 21 |
| V. min (p.u.) | 0.9091 | 0.9679 | 0.9302 | 0.9734 | 0.9167 | 0.9690 | 0.9361 | 0.9740 | 0.9226 | 0.9700 | 0.9402 | 0.9748 |
| Min voltage bus | (65) | (27) | (65) | (27) | (65) | (27) | (65) | (27) | (65) | (27) | (65) | (27) |
| P.L reduction% | 62.95 | 32.40 | 89.71 | 61.43 | 32.63 | 88.5 | 60.40 | 31.22 | 87.44 | |||
| PF | 0.81 | 0.81 | 0.81 | |||||||||
| CP Type Load | CI Type Load | CZ Type Load | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Type of load | B.C | DG type | B.C | DG type | B.C | DG type | ||||||
| DG type | Type-I | Type-II | Type-III | Type-I | Type-II | Type-III | Type-I | Type-II | Type-III | |||
| Location | 61 17 | 61 17 | 61 17 | 61 17 | 61 17 | 61 17 | 61 17 | 61 17 | 61 17 | |||
| Size | 1.724 0.518 2.24 | 1.236 0.35 1.586 | 2.127 0.626 2.752 | 1.575 0.497 2.072 | 1.147 0.336 1.483 | 1.979 0.606 2.585 | 1.583 0.507 2.090 | 1.069 0.326 1.395 | 1.834 0.559 2.393 | |||
| Total capacity | ||||||||||||
| Power loss (PL) | 224.997 | 71.804 | 146.51 | 7.1857 | 191.5 | 62.87 | 124.84 | 6.87 | 167.2 | 62.82 | 110.9 | 6.8 |
| V. min (p.u.) | 0.9091 | 0.9769 | 0.9305 | 0.9946 | 0.9167 | 0.9783 | 0.9364 | 0.9946 | 0.9226 | 0.9801 | 0.9405 | 0.9940 |
| Min voltage bus | (65) | (65) | (65) | (69) | (65) | (65) | (65) | (69) | (65) | (65) | (65) | (69) |
| PL reduction% | 68.09 | 34.88 | 96.8 | 67.17 | 30.80 | 96.41 | 66.69 | 33.67 | 95.93 | |||
| PF | 0.81 0.83 | 0.81 0.83 | 0.81 0.81 | |||||||||
| Type of Load | CP Type Load | CI Type Load | CZ Type Load | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| DG type | B.C | DG type | B.C | DG type | B.C | DG type | ||||||
| Type-I | Type-II | Type-III | Type-I | Type-II | Type-III | Type-I | Type-II | Type-III | ||||
| Location | 11 18 61 | 11 21 61 | 11 18 61 | 11 18 61 | 11 18 61 | 11 18 61 | 11 18 61 | 11 18 61 | 11 18 61 | |||
| Size | 0.499 0.377 1.668 | 0.368 0.231 1.196 | 0.616 0.452 2.050 | 0.491 0.359 1.520 | 0.336 0.241 1.109 | 0.604 0.438 1.884 | 0.493 0.358 1.427 | 0.336 0.231 1.031 | 0.602 0.425 1.758 | |||
| Total capacity | 2.545 | 1.795 | 3.119 | 2.370 | 1.686 | 2.926 | 2.278 | 1.597 | 2.785 | |||
| Power loss (P.L) | 224.997 | 69.5456 | 145.21 | 4.25 | 191.5 | 60.70 | 123.67 | 4 | 167.2 | 53.6 | 109.7 | 3.9 |
| V. min (p.u.) | 0.9091 | 0.9770 | 0.9307 | 0.9972 | 0.9167 | 0.9785 | 0.9367 | 0.9974 | 0.9226 | 0.9802 | 0.9408 | 0.9975 |
| Min voltage bus | (65) | (65) | (65) | (65) | (65) | (65) | (65) | (65) | (65) | (65) | (65) | (50) |
| P.L reduction% | - | 69.09 | 35.46 | 98.11 | 68.3 | 35.42 | 97.91 | 67.94 | 34.39 | 97.67 | ||
| - | ||||||||||||
| PF | 0.82 0.81 0.81 | - | 0.82 0.84 0.81 | 0.82 0.84 0.81 | ||||||||
| Case | Technique | (Location) Size (MVA) | Total Capacity (MVA) | Power Loss | P.f | V min | Loss Reduction% | |||
|---|---|---|---|---|---|---|---|---|---|---|
| 1 DG | Proposed | Bus | 61 | 2.22 | 23.15 | 0.81 | 0.9734 | 89.71 | ||
| Size | 2.22 | |||||||||
| GA [29] | Bus | 61 | 2.16 | 38.45 | NA | NA | 82.91 | |||
| Size | 2.16 | |||||||||
| 3 DG | Proposed | Bus | 11 | 18 | 61 | 3.119 | 4.25 | 0.82 0.81 0.81 | 0.9972 (65) | 98.11 |
| Size | 0.616 | 0.452 | 2.050 | |||||||
| Hybrid [30] | Bus | 18 | 61 | 66 | 3.07 | 4.30 | 0.77 0.83 0.82 | NA | 98.1 | |
| Size | 0.48 | 2.06 | 0.53 | |||||||
| CPLS [31] | Bus | 21 | 61 | 64 | 3.356 | 7.1 | 0.81 0.81 0.81 | 0.9934 (69) | 96.84 | |
| Size | 0.723 | 2.20 | 0.438 | |||||||
| EA [32] | Bus | 11 | 18 | 61 | 3.239 | 4.48 | 0.82 0.83 0.82 | NA | NA | |
| Size | 0.668 | 0.458 | 2.113 | |||||||
| EA-OPF [32] | Bus | 11 | 18 | 61 | 3.134 | 4.27 | 0.81 0.83 0.81 | NA | NA | |
| Size | 0.611 | 0.456 | 2.067 | |||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohamed, A.A.; Kamel, S.; Selim, A.; Khurshaid, T.; Rhee, S.-B. Developing a Hybrid Approach Based on Analytical and Metaheuristic Optimization Algorithms for the Optimization of Renewable DG Allocation Considering Various Types of Loads. Sustainability 2021, 13, 4447. https://doi.org/10.3390/su13084447
Mohamed AA, Kamel S, Selim A, Khurshaid T, Rhee S-B. Developing a Hybrid Approach Based on Analytical and Metaheuristic Optimization Algorithms for the Optimization of Renewable DG Allocation Considering Various Types of Loads. Sustainability. 2021; 13(8):4447. https://doi.org/10.3390/su13084447
Chicago/Turabian StyleMohamed, Amal A., Salah Kamel, Ali Selim, Tahir Khurshaid, and Sang-Bong Rhee. 2021. "Developing a Hybrid Approach Based on Analytical and Metaheuristic Optimization Algorithms for the Optimization of Renewable DG Allocation Considering Various Types of Loads" Sustainability 13, no. 8: 4447. https://doi.org/10.3390/su13084447