
Critical Performance Analysis of Four-Wheel Drive Hybrid Electric Vehicles Subjected to Dynamic Operating Conditions


 ,
, 
 and
and 
Abstract
:1. Introduction
1.1. Driving System Review
1.2. Energy Management Strategy Review
1.3. Contribution and Structure of the Paper
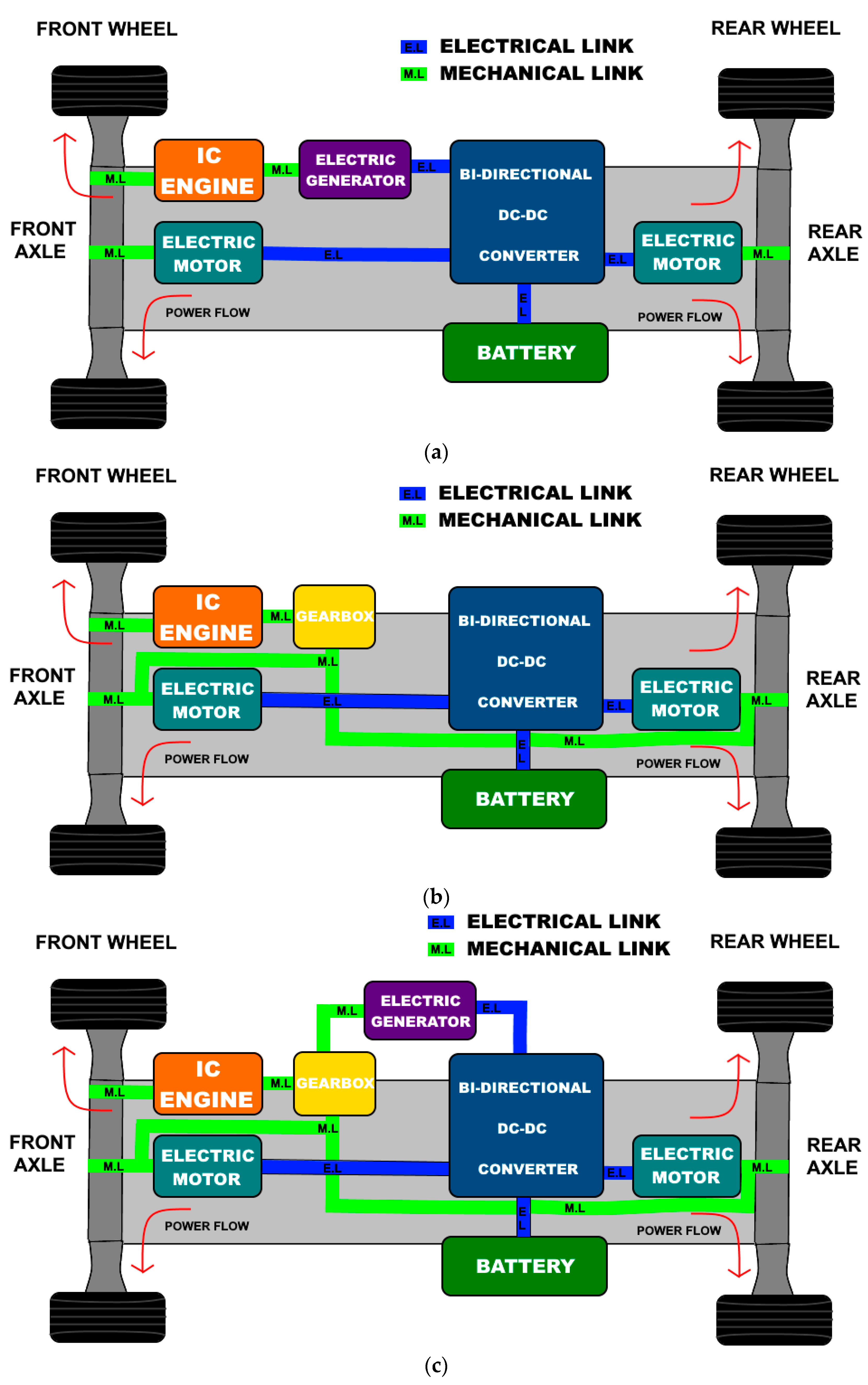
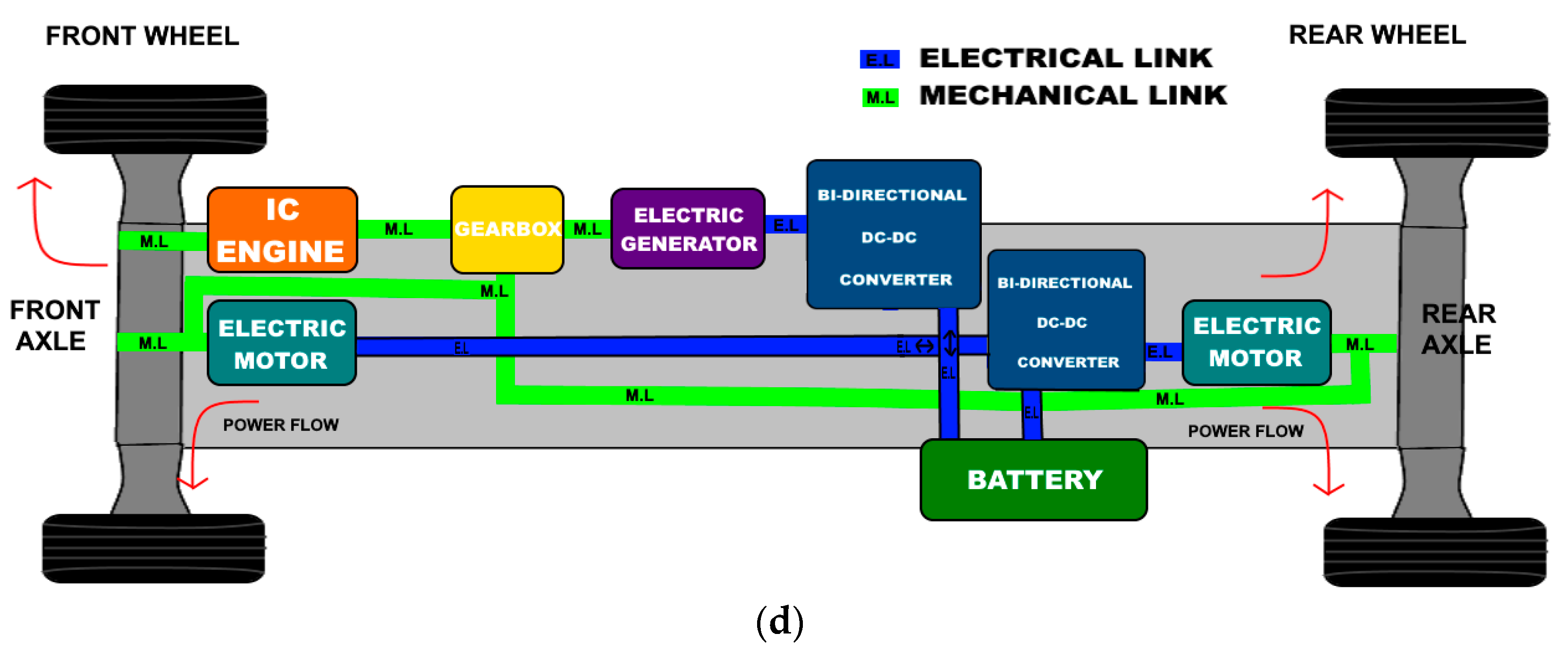
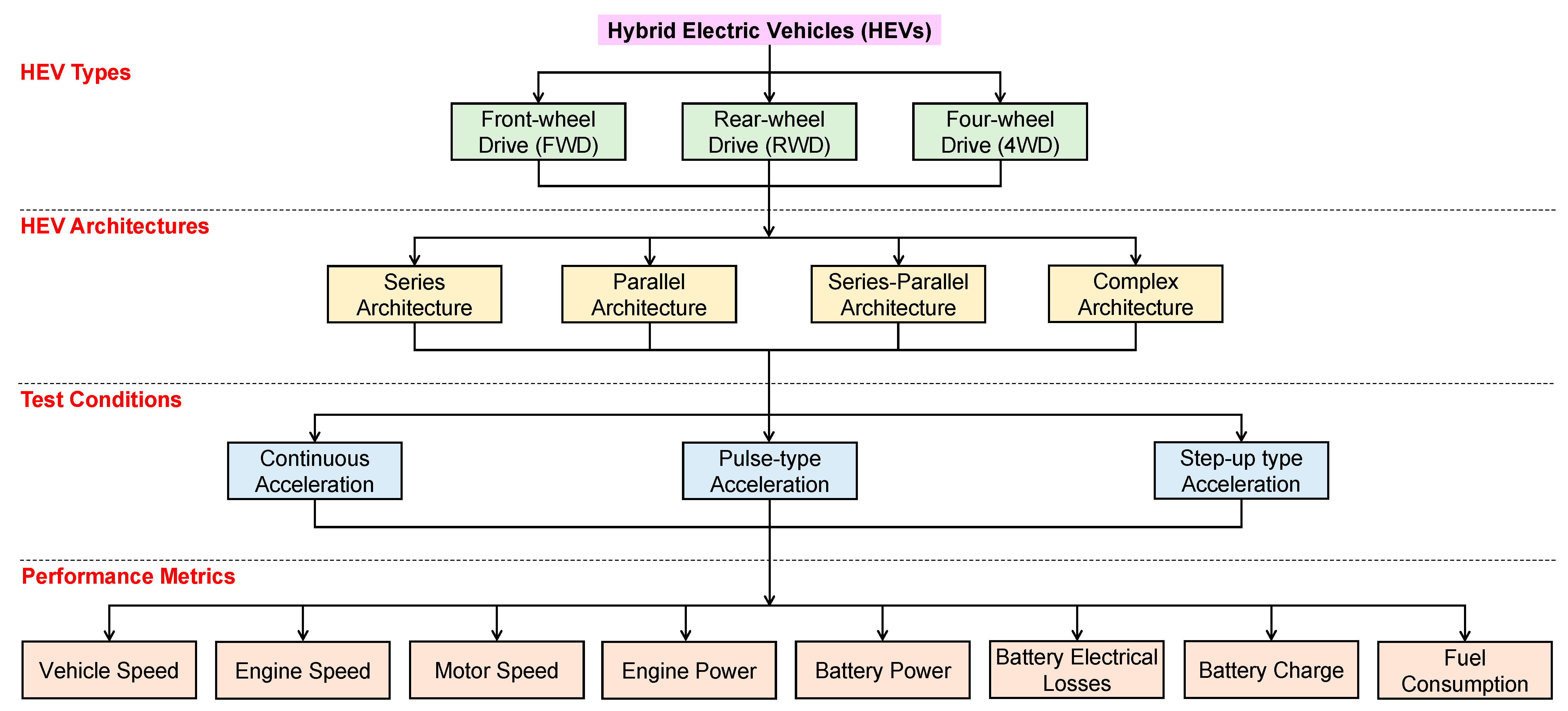
2. Description and Modelling of 4WD HEV Architectures
2.1. Torque and Speed Calculations
2.2. Fuel Calculations
2.3. Power Calculations
3. System Implementation and Test Conditions
3.1. Dynamic Operating Conditions
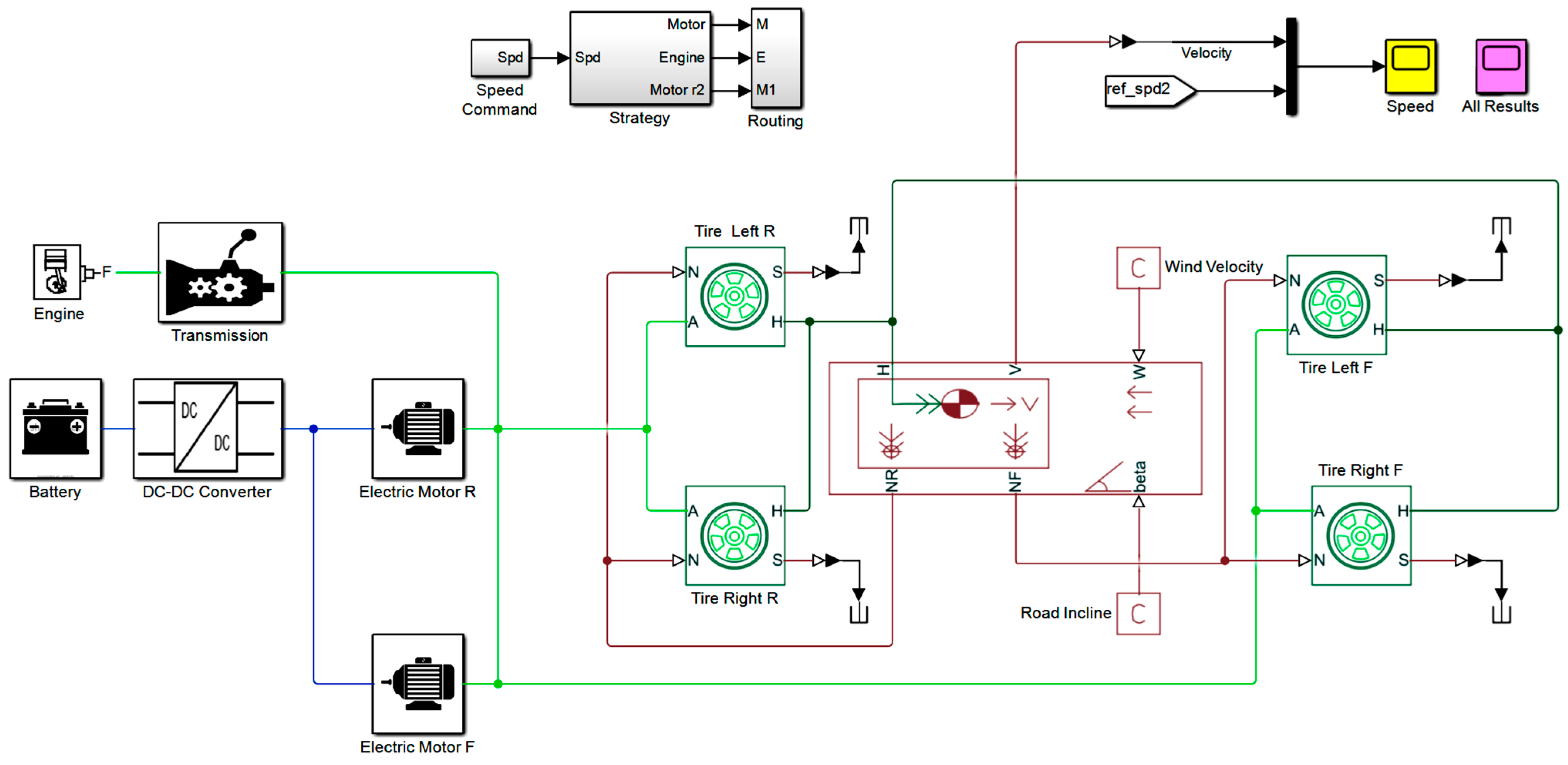
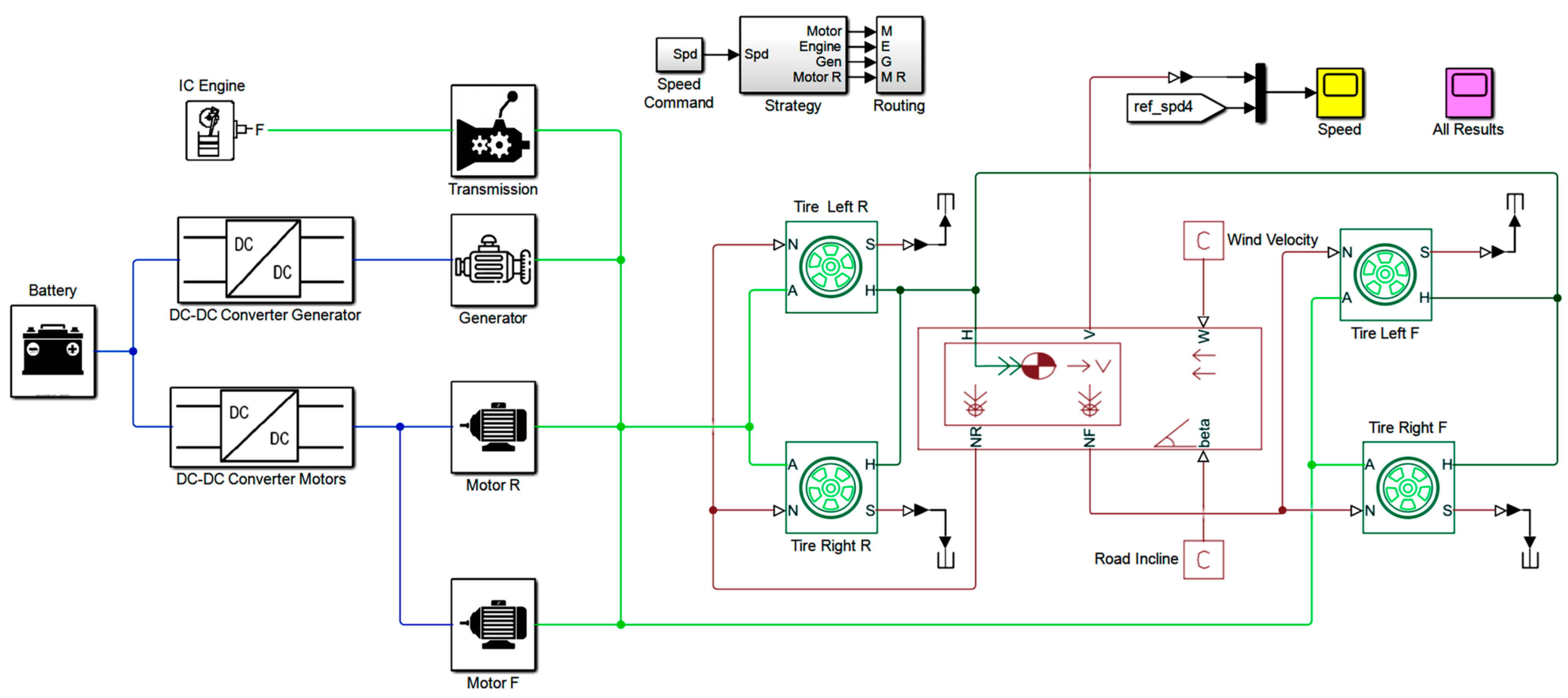
3.2. System Implementation
4. Results and Discussion
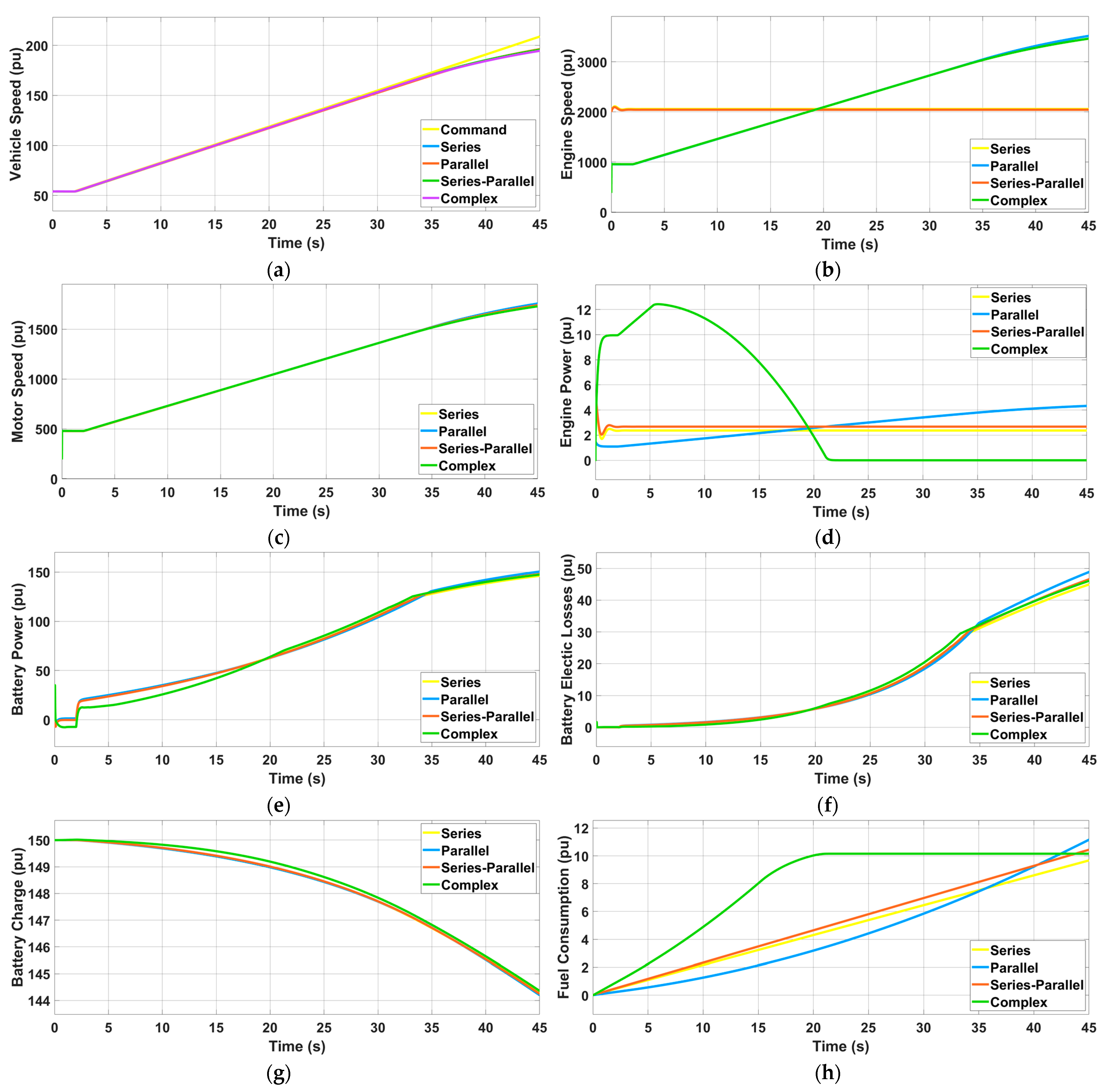
4.1. HEV Performance Parameters for Test Input-1
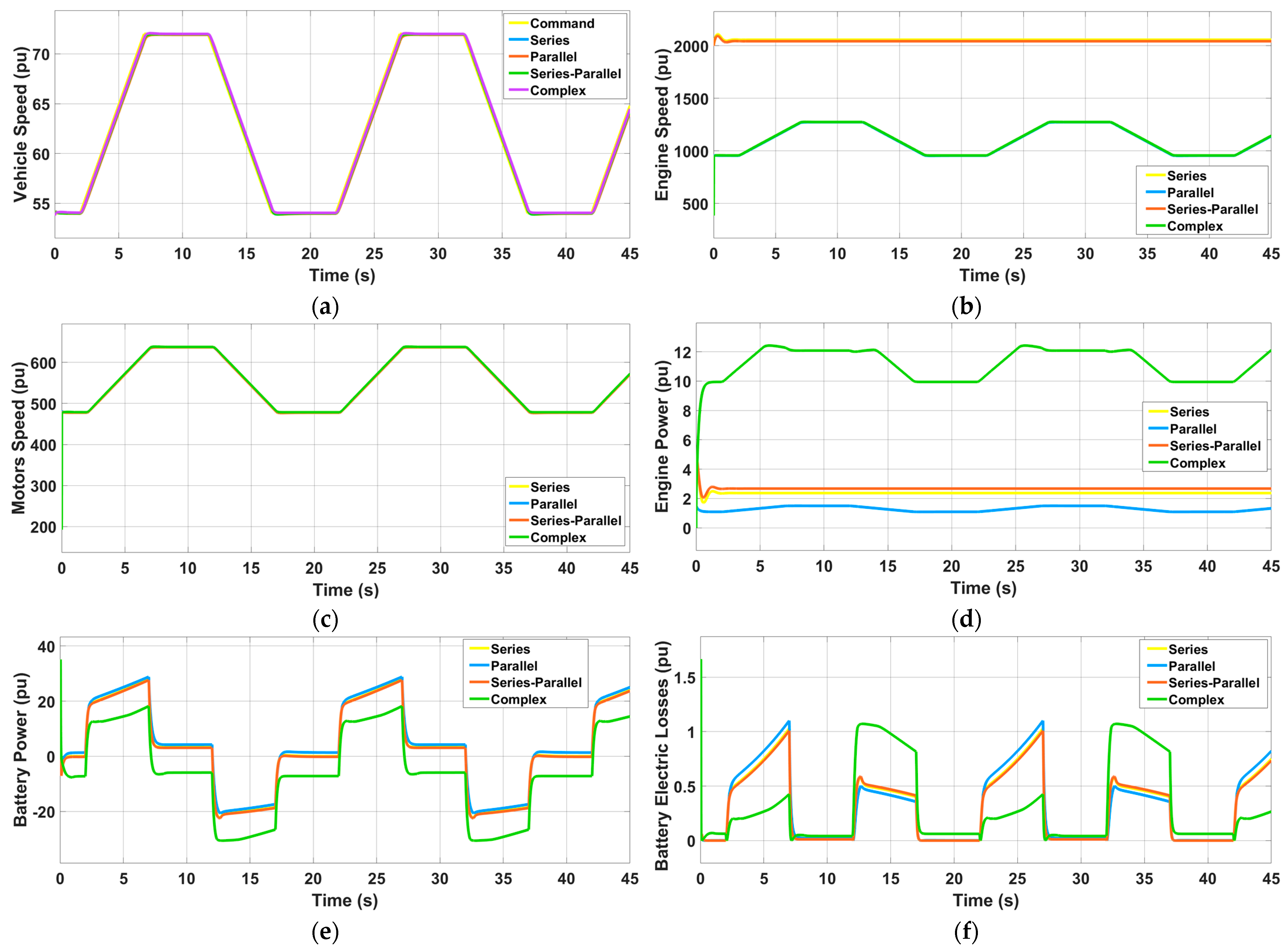
4.2. HEV Performance Parameters for Test Input-2
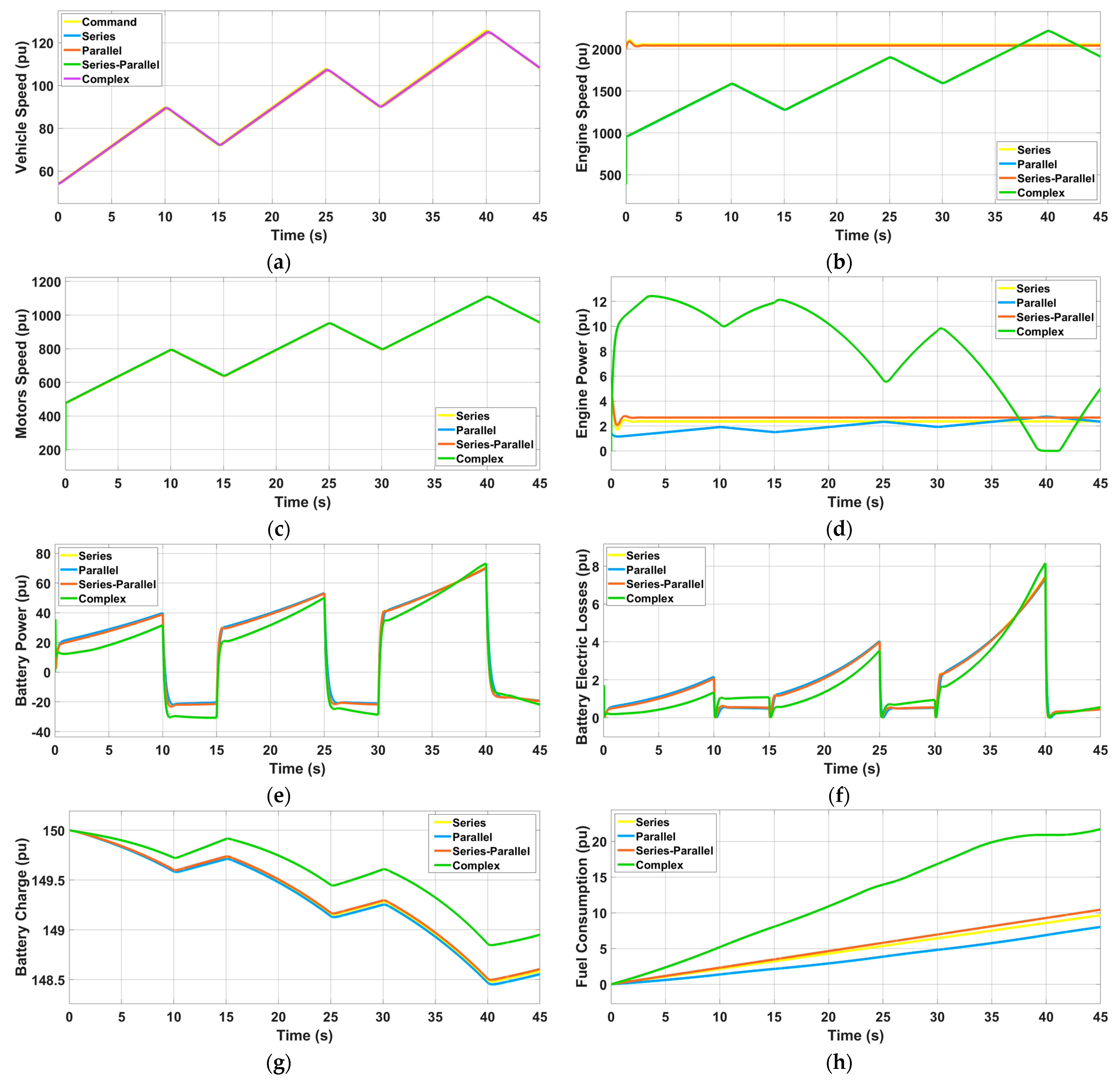
4.3. HEV Performance Parameters for Test Input-3
4.4. Validation of 4WD HEV Architectures
5. Conclusions
- If fuel economy is to be prioritized, the parallel architecture is recommended;
- If power and speed are to be prioritized over fuel economy, the complex architecture is recommended;
- If the balanced fuel, power, and speed are to be prioritized, the parallel architecture is recommended. This can be reinforced by the conclusions presented in [37].
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Amir, M.; Zaheeruddin; Haque, A.; Kurukuru, V.S.B.; Baksh, F.I.; Ahmad, A. Agent Based Online Learning Approach for Power Flow Control of Electric Vehicle Fast Charging Station Integrated with Smart Microgrid. IET Renew. Power Gener. 2020, 14, 1–13. [Google Scholar] [CrossRef]
- Amir, M.; Zaheeruddin; Haque, A. Optimal Scheduling of Charging/Discharging Power and EVs Pattern Using Stochastic Techniques in V2G System. In Proceedings of the IEEE Transportation Electrification Conference (ITEC), New Delhi, India, 16–19 December 2021. [Google Scholar] [CrossRef]
- Prasanth, B.; Paul, R.; Kaliyaperumal, D.; Kannan, R.; Venkata Pavan Kumar, Y.; Kalyan Chakravarthi, M.; Venkatesan, N. Maximizing Regenerative Braking Energy Harnessing in Electric Vehicles Using Machine Learning Techniques. Electronics 2023, 12, 1119. [Google Scholar] [CrossRef]
- Potnuru, D.; Ayyarao, T.S.L.V.; Kumar, L.V.S.; Kumar, Y.V.P.; Pradeep, D.J.; Reddy, C.P. Salp Swarm Algorithm Based Optimal Speed Control For Electric Vehicles. Int. J. Power Electron. Drive Syst. 2022, 13, 755–763. [Google Scholar] [CrossRef]
- Rao, S.N.V.B.; Kumar, Y.V.P.; Pradeep, D.J.; Reddy, C.P.; Flah, A.; Kraiem, H.; Al-Asad, J.F. Power Quality Improvement in Renewable-Energy-Based Microgrid Clusters Using Fuzzy Space Vector PWM Controlled Inverter. Sustainability 2022, 14, 4663. [Google Scholar] [CrossRef]
- Reddy, Y.J.; Kumar, Y.V.P.; Raju, K.P.; Ramsesh, A. Retrofitted Hybrid Power System Design With Renewable Energy Sources for Buildings. IEEE Trans. Smart Grid 2012, 3, 2174–2187. [Google Scholar] [CrossRef]
- Khalid, H.M.; Flitti, F.; Muyeen, S.M.; El Moursi, M.S.; Sweidan, T.O.; Yu, X. Parameter Estimation of Vehicle Batteries in V2G Systems: An Exogenous Function-Based Approach. IEEE Trans. Ind. Electron. 2022, 69, 9535–9546. [Google Scholar] [CrossRef]
- Khalid, H.M.; Peng, J.C.-H. H. Bi-Directional Charging in V2G Systems: An In-Cell Variation Analysis of Vehicle Batteries. IEEE Syst. J. 2020, 14, 3665–3675. [Google Scholar] [CrossRef]
- Qiu, L.; Qian, L.; Zomorodi, H.; Pisu, P. Global Optimal Energy Management Control Strategies for Connected Four-wheel-drive Hybrid Electric Vehicles. IET Intell. Transp. Syst. 2017, 11, 264–272. [Google Scholar] [CrossRef]
- Yim, S.; Choi, J.; Yi, K. Coordinated Control of Hybrid 4WD Vehicles for Enhanced Maneuverability and Lateral Stability. IEEE Trans. Veh. Technol. 2012, 61, 1946–1950. [Google Scholar] [CrossRef]
- Iervolino, R.; Sakhnevych, A. Modeling, Simulation and Control of a 4WD Electric Vehicle with In-Wheel Motors. In Advances in Service and Industrial Robotics; Ferraresi, C., Quaglia, G., Eds.; Mechanisms and Machine Science; Springer International Publishing: Cham, Switzerland, 2018; Volume 49, pp. 444–455. ISBN 978-3-319-61275-1. [Google Scholar] [CrossRef]
- Hall, J.; Bassett, M.; Borman, S.; Lucas, T.; Whitehead, A. Through-the-Road Parallel Hybrid with In-Wheel Motors; SAE Technical Paper 2016-01-1160; SAE International: Warrendale, PA, USA, 2016. [Google Scholar] [CrossRef]
- Raslavičius, L.; Keršys, A.; Makaras, R. Management of Hybrid Powertrain Dynamics and Energy Consumption for 2WD, 4WD, and HMMWV Vehicles. Renew. Sustain. Energy Rev. 2017, 68, 380–396. [Google Scholar] [CrossRef]
- Qiu, L.; Qian, L.; Zomorodi, H.; Pisu, P. Design and Optimization of Equivalent Consumption Minimization Strategy for 4WD Hybrid Electric Vehicles Incorporating Vehicle Connectivity. Sci. China Technol. Sci. 2018, 61, 147–157. [Google Scholar] [CrossRef]
- Han, K.; Choi, M.; Lee, B.; Choi, S.B. Development of a Traction Control System Using a Special Type of Sliding Mode Controller for Hybrid 4WD Vehicles. IEEE Trans. Veh. Technol. 2018, 67, 264–274. [Google Scholar] [CrossRef]
- Shen, Y.; Zhang, B.; Liu, H.; Cui, Y.; Hussain, F.; He, S.; Hu, F. Design and Development of a Novel Independent Wheel Torque Control of 4WD Electric Vehicle. Mechanics 2019, 25, 210–218. [Google Scholar] [CrossRef]
- Ju, F.; Zhuang, W.; Wang, L.; Zhang, Z. Optimal Sizing and Adaptive Energy Management of a Novel Four-Wheel-Drive Hybrid Powertrain. Energy 2019, 187, 116008. [Google Scholar] [CrossRef]
- Zhao, Z.; Lei, D.; Chen, J.; Li, H. Optimal Control of Mode Transition for Four-Wheel-Drive Hybrid Electric Vehicle with Dry Dual-Clutch Transmission. Mech. Syst. Signal Process. 2018, 105, 68–89. [Google Scholar] [CrossRef]
- Kaban, S.; Dong, Z.; Crawford, C. Performance Modeling and Benchmark Analysis of an Advanced 4WD Series-Parallel PHEV Using Dynamic Programming. In Proceedings of the 2015 IEEE Vehicle Power and Propulsion Conference (VPPC), Montreal, QC, Canada, 19–22 October 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Wu, D.; Li, Y.; Du, C.; Ding, H.; Li, Y.; Yang, X.; Lu, X. Fast Velocity Trajectory Planning and Control Algorithm of Intelligent 4WD Electric Vehicle for Energy Saving Using Time-based MPC. IET Intell. Transp. Syst. 2019, 13, 153–159. [Google Scholar] [CrossRef]
- Wang, W.; Qu, F.; Wang, Q.; Wu, C. Research on Energy Control Strategy of 4WD Hybrid Electric Vehicle Based on Fuzzy Control. In Proceedings of the 2018 2nd IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Xi’an, China, 25–27 May 2018; pp. 1806–1811. [Google Scholar] [CrossRef]
- Xu, L.; Li, Z.; Sun, H.; Fan, J.; Bai, Q.; Ou, Y.; Wang, P.; Deng, B. Study on Control Strategy for Series-Parallel Hybrid Electric Vehicles. J. Phys. Conf. Ser. 2020, 1617, 012059. [Google Scholar] [CrossRef]
- Baumann, P.; Schroeder, M.; Kurz, H.; Maier, T.; Thiel, W.; Strehl, U. Investigation of the Influencing Parameters Using Optimized Exhaust Emissions Measurement Systems with Different Modern Plug-In Hybrid Electrical Vehicles; SAE Technical Paper 2015-01-1069; SAE International: Warrendale, PA, USA, 2015. [Google Scholar] [CrossRef]
- Xie, Y.; Wang, S. Research on Regenerative Braking Control Strategy and Simulink Simulation for 4WD Electric Vehicle. IOP Conf. Ser. Mater. Sci. Eng. 2018, 398, 012013. [Google Scholar] [CrossRef]
- Park, G.; Choi, S.B. Development of a Torque Vectoring System in Hybrid 4WD Vehicles to Improve Vehicle Safety and Agility. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; pp. 316–321. [Google Scholar] [CrossRef]
- Basrah, M.S.; Velenis, E.; Cao, D. Four Wheel Torque Blending for Slip Control in a Hybrid Electric Vehicle with a Single Electric Machine. In Proceedings of the 2015 International Conference on Sustainable Energy Engineering and Application (ICSEEA), Bandung, Indonesia, 5–7 October 2015; pp. 19–24. [Google Scholar] [CrossRef]
- Farrokhzad Ershad, N.; Tafazzoli Mehrjardi, R.; Ehsani, M. High-Performance 4WD Electric Powertrain With Flywheel Kinetic Energy Recovery. IEEE Trans. Power Electron. 2021, 36, 772–784. [Google Scholar] [CrossRef]
- Vantsevich, V.V.; Paldan, J.R.; Farley, B.K. Mobility Optimization and Control of a 4x4 HE-Vehicle in Curvilinear Motion on Stochastic Terrain. In Proceedings of the 18th International Conference on Advanced Vehicle Technologies, Charlotte, NC, USA, 21 August 2016; p. V003T01A005. [Google Scholar] [CrossRef]
- Andari, W.; Ben Yahia, M.S.; Allagui, H.; Mami, A. Modeling and Simulation of PEM Fuel Cell/Supercapacitor Hybrid Power Sources for an Electric Vehicle. In Proceedings of the 2019 10th International Renewable Energy Congress (IREC), Sousse, Tunisia, 26–28 March 2019; pp. 1–6. [Google Scholar] [CrossRef]
- He, R.; Song, Z.; Li, J.; Ouyang, M. Optimal Torque Distribution Strategy Considering Energy Loss and Tire Adhesion for 4WD Electric Vehicles. In Proceedings of the 2017 IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific), Harbin, China, 7–10 August 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Zeng, X.; Zhang, X.; Gao, F.; Yang, T.; Nie, Y.; Chen, J. Analysis of the Efficiency of Two Different Electric-Continuously Variable Transmission for Hybrid Electric Bus. In Proceedings of the 2019 3rd Conference on Vehicle Control and Intelligence (CVCI), Hefei, China, 21–22 September 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Vitázek, I.; Tkáč, Z.; Mojžiš, M. Evaluation of Drive Type Properties on the Basis of Engine-Speed Maps. In Proceedings of the AIP Conference Proceedings, Sturovo, Slovakia, 7 August 2018; p. 020021. [Google Scholar] [CrossRef]
- Nguyen, C.T.P.; Trovao, J.P.F.; Nguyen, B.-H.; Ta, M.C. Powertrain Analysis of an All-Wheel-Drive Off-Road Electric Vehicle. In Proceedings of the 2019 IEEE Vehicle Power and Propulsion Conference (VPPC), Hanoi, Vietnam, 14–17 October 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Siddharth, B.R.; Pradeep, D.J.; Kumar, Y.V.P.; Reddy, C.P.; Flah, A. Dynamic Performance Analysis of Front-Wheel Drive Hybrid Electric Vehicle Architectures under Different Real-Time Operating Conditions. Int. J. Powertrains 2022, 11, 62. [Google Scholar] [CrossRef]
- Raja Siddharth, B.; Sai Chandu, V.; Mani Babu, D.; John Pradeep, D.; Pavan Kumar, Y.V. Performance Analysis of Hybrid Electric Vehicle Architectures under Dynamic Operating Conditions. Int. J. Adv. Sci. Technol. 2020, 29, 4370–4390. [Google Scholar]
- Mehrdad, E.; Yimin, G.; Emadi, A. Modern Electric, Hybrid Electric, and Fuel Cell Vehicles: Fundamentals, Theory, and Design; CRC Press: Boca Raton, FL, USA, 2010. [Google Scholar] [CrossRef]
- Chen, B.; Li, X.; Evangelou, S. Comparative Study of Hybrid Powertrain Architectures from a Fuel Economy Perspective. In Proceedings of the 14th International Symposium on Advanced Vehicle Control (AVEC), Beijing, China, 16–20 July 2018; Available online: https://discovery.ucl.ac.uk/id/eprint/10083602 (accessed on 23 May 2023).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Conditions or Inputs | Observed Parameters |
|---|---|
| 1. Continuous acceleration | 1. Vehicle speed |
| 2. Pulse-type acceleration | 2. Engine speed |
| 3. Step-up type acceleration | 3. Motor speed |
| 4. Engine power | |
| 5. Battery power | |
| 6. Battery electrical loss | |
| 7. Battery charge | |
| 8. Fuel consumption |
| Parameter | Description |
|---|---|
| Twheel | Wheel torque |
| Swheel | Wheel speed |
| igr | Transmission gear ratio |
| iog | Drive final gear ratio |
| ηtw | Driveline efficiency |
| Peng | Engine load power |
| Seng | Engine speed |
| Fw | Aerodynamic drag |
| Ff | Frictional force (rolling friction) |
| Mvehicle | Mass of the vehicle |
| Sv | Vehicle speed |
| γf | Fuel’s mass density (kg/L) |
| Fg | Grading force |
| Pmax | Maximum power delivered by battery to load |
| Voper | Battery operating voltage |
| Rinternal | Internal resistance |
| Rcon | Conductor resistance |
| fr | Tire rolling resistance coefficient (=0.01) |
| g | Gravity acceleration in 9.80 m/s2 |
| ρa | Air density (=1.18 kg/m3), |
| Af | Vehicle’s front area (=3 m2) |
| CD | Aerodynamic drag coefficient (=0.4) |
| ηt | Transmission efficiency |
| ηm | Traction motor efficiency |
| ηt,e | Wheels transmission efficiency |
| Performance Metrics | Test Input | 4WD HEV Architectures | FWD HEV Architectures [34] | RWD HEV Architectures [35] | Superior Architecture | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Series | Parallel | Series-Parallel | Complex | Series | Parallel | Series-Parallel | Complex | Series | Parallel | Series-Parallel | Complex | |||
| Vehicle Speed (Desired: High value) | 1 | 195.1 | 196.2 | 195.8 | 194.5 | 140 | 144.2 | 141.7 | 142.2 | 139.9 | 147.2 | 141.7 | 155.7 | 4WD Parallel |
| 2 | 71.95 | 71.92 | 71.96 | 72.07 | 71.76 | 71.65 | 71.84 | 72.06 | 71.8 | 71.93 | 71.8 | 18.08 | 4WD Complex | |
| 3 | 125.1 | 124.7 | 125.1 | 125.1 | 116.6 | 118 | 117.2 | 119.7 | 116.5 | 118.9 | 117 | 71.7 | 4WD | |
| Motor Speed (Desired: High value) | 1 | 802.2 | 803.2 | 802.5 | 790.1 | 1247 | 1284 | 1261 | 1265 | 1246 | 1311 | 1261 | 1343 | RWD Complex |
| 2 | 540.7 | 540.9 | 540.8 | 536.1 | 633.7 | 636.6 | 634.3 | 637.3 | 636.3 | 637.1 | 636.4 | 645.3 | RWD Complex | |
| 3 | 796.4 | 796.7 | 796.5 | 790.4 | 1035 | 1049 | 1039 | 1060 | 1035 | 1051 | 1040 | 1065 | RWD Complex | |
| Engine Speed (Desired: High value) | 1 | 2054 | 1606 | 2043 | 1580 | 2057 | 2567 | 2043 | 2529 | 2162 | 5596 | 2153 | 6002 | RWD Complex |
| 2 | 2057 | 1082 | 2043 | 1072 | 2056 | 1272 | 2043 | 1275 | 2002 | 2020 | 2053 | 1803 | 4WD Series | |
| 3 | 2055 | 1593 | 2042 | 1581 | 2057 | 2097 | 2043 | 2120 | 2162 | 4512 | 2154 | 3944 | RWD Parallel | |
| Engine Power (Desired: Low value) | 1 | 3.01 | 2.03 | 3.22 | 4.66 | 2.8 | 2.2 | 3.4 | 3.5 | 4.9 | 5.5 | 4.94 | 5.0 | 4WD Parallel |
| 2 | 2.67 | 1.30 | 2.93 | 9.89 | 3.2 | 1.35 | 3.46 | 10.04 | 4.9 | 3.4 | 4.94 | 6.98 | 4WD Parallel | |
| 3 | 2.59 | 1.96 | 2.86 | 7.11 | 2.37 | 2.45 | 2.67 | 6.51 | 4.9 | 5.17 | 4.94 | 24.7 | 4WD Parallel | |
| Battery Power (Desired: High value) | 1 | 44.3 | 44.4 | 44.3 | 44.0 | 51.41 | 55.36 | 52.92 | 54.04 | 50.8 | 55.1 | 52.3 | 42.0 | FWD Parallel |
| 2 | 38.9 | 48.6 | 30.7 | 24.3 | 25.65 | 28.03 | 25.99 | 18.13 | 25.09 | 27.4 | 25.4 | 8.45 | 4WD Parallel | |
| 3 | 77.6 | 90.4 | 75.5 | 36.6 | 27.86 | 29.8 | 29.02 | 34.01 | 42.01 | 45.2 | 42.8 | 34.7 | 4WD Parallel | |
| Batter Electric Loss (Desired: Low value) | 1 | 8.03 | 7.95 | 8.07 | 8.35 | 3.74 | 4.40 | 3.39 | 4.10 | 3.65 | 4.49 | 3.8 | 0.79 | RWD Complex |
| 2 | 2.52 | 2.61 | 2.50 | 2.80 | 0.84 | 1.03 | 0.88 | 0.90 | 0.64 | 0.74 | 0.66 | 0.10 | RWD Complex | |
| 3 | 8.33 | 8.37 | 8.28 | 7.84 | 1.01 | 1.15 | 1.06 | 1.34 | 2.42 | 2.84 | 2.5 | 1.19 | FWD Series | |
| Battery Charge (Desired: High value) | 1 | 149.1 | 149.1 | 149.1 | 149.2 | 147.6 | 147.3 | 147.5 | 147.5 | 148.7 | 148.7 | 148.1 | 148.6 | 4WD Complex |
| 2 | 149.9 | 149.9 | 149.9 | 150.3 | 149.8 | 149.7 | 149.8 | 150.1 | 149.9 | 149.9 | 149.9 | 150.1 | 4WD Complex | |
| 3 | 149.4 | 149.3 | 149.4 | 149.6 | 147.8 | 148.6 | 147.8 | 149 | 149.1 | 149.4 | 149.3 | 149.0 | 4WD Complex | |
| Fuel Consumption (Desired: Low value) | 1 | 9.6 | 11.6 | 10.4 | 10.1 | 9.67 | 9.39 | 10.44 | 11.14 | 19.1 | 19.8 | 10.4 | 29.6 | 4WD Series |
| 2 | 9.6 | 5.3 | 10.4 | 21.3 | 9.69 | 5.39 | 10.44 | 21.4 | 9.0 | 10.9 | 10.4 | 11.3 | 4WD Parallel | |
| 3 | 9.6 | 8.0 | 10.4 | 21.7 | 9.67 | 8.86 | 10.44 | 22.69 | 9.1 | 16.06 | 10.4 | 42.36 | 4WD Parallel | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pradeep, D.J.; Kumar, Y.V.P.; Siddharth, B.R.; Reddy, C.P.; Amir, M.; Khalid, H.M. Critical Performance Analysis of Four-Wheel Drive Hybrid Electric Vehicles Subjected to Dynamic Operating Conditions. World Electr. Veh. J. 2023, 14, 138. https://doi.org/10.3390/wevj14060138
Pradeep DJ, Kumar YVP, Siddharth BR, Reddy CP, Amir M, Khalid HM. Critical Performance Analysis of Four-Wheel Drive Hybrid Electric Vehicles Subjected to Dynamic Operating Conditions. World Electric Vehicle Journal. 2023; 14(6):138. https://doi.org/10.3390/wevj14060138
Chicago/Turabian StylePradeep, Darsy John, Yellapragada Venkata Pavan Kumar, Bollineni Raja Siddharth, Challa Pradeep Reddy, Mohammad Amir, and Haris M. Khalid. 2023. "Critical Performance Analysis of Four-Wheel Drive Hybrid Electric Vehicles Subjected to Dynamic Operating Conditions" World Electric Vehicle Journal 14, no. 6: 138. https://doi.org/10.3390/wevj14060138