
Direct Torque Control of an Induction Motor Using Fractional-Order Sliding Mode Control Technique for Quick Response and Reduced Torque Ripple


Abstract
:1. Introduction
- Control algorithm of an FOSMC for SVM-based DTC for induction motor drives (IMDs);
- Derivation of the electromagnetic torque of an IMD using an FOSMC-DTC scheme;
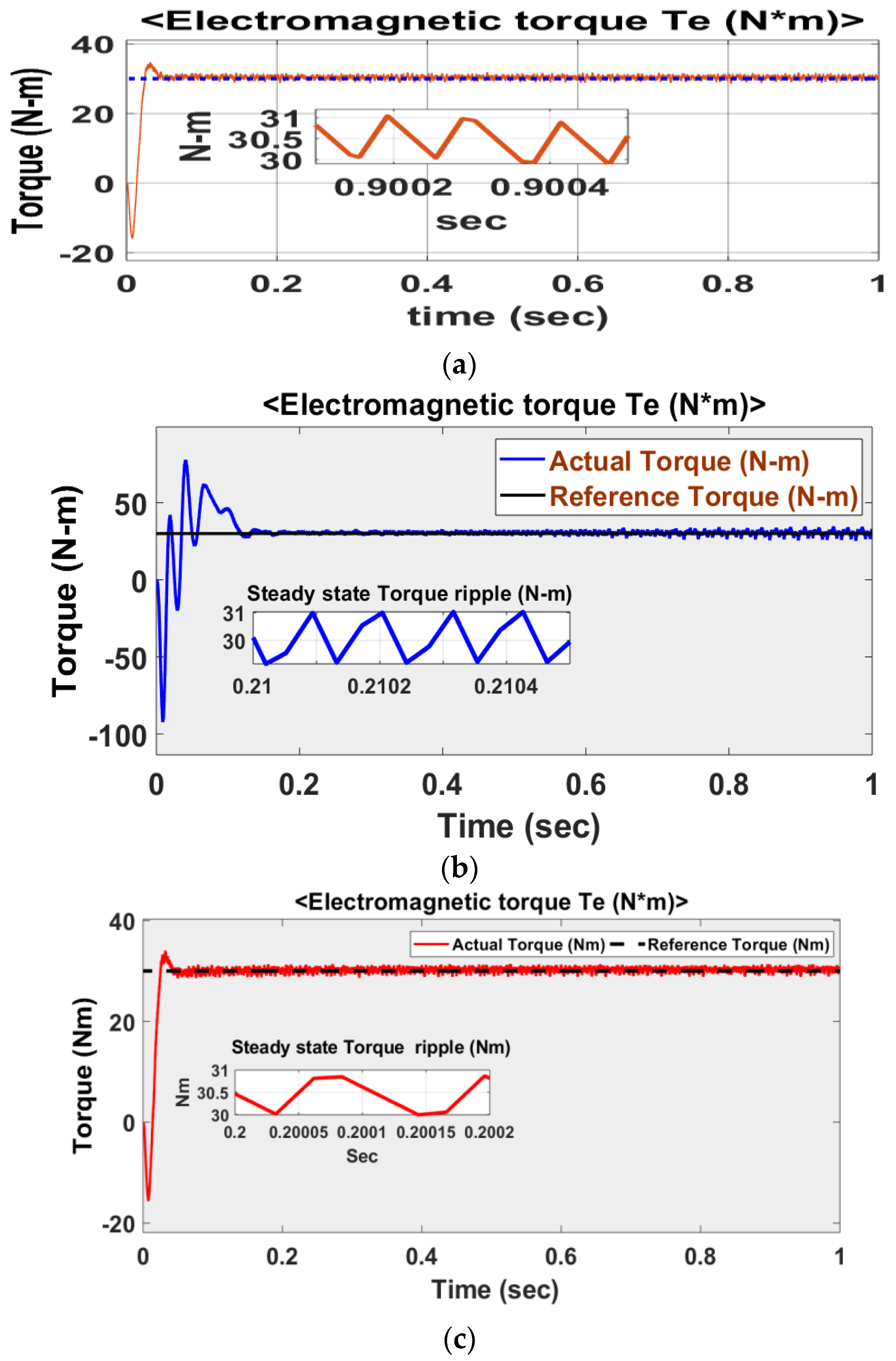
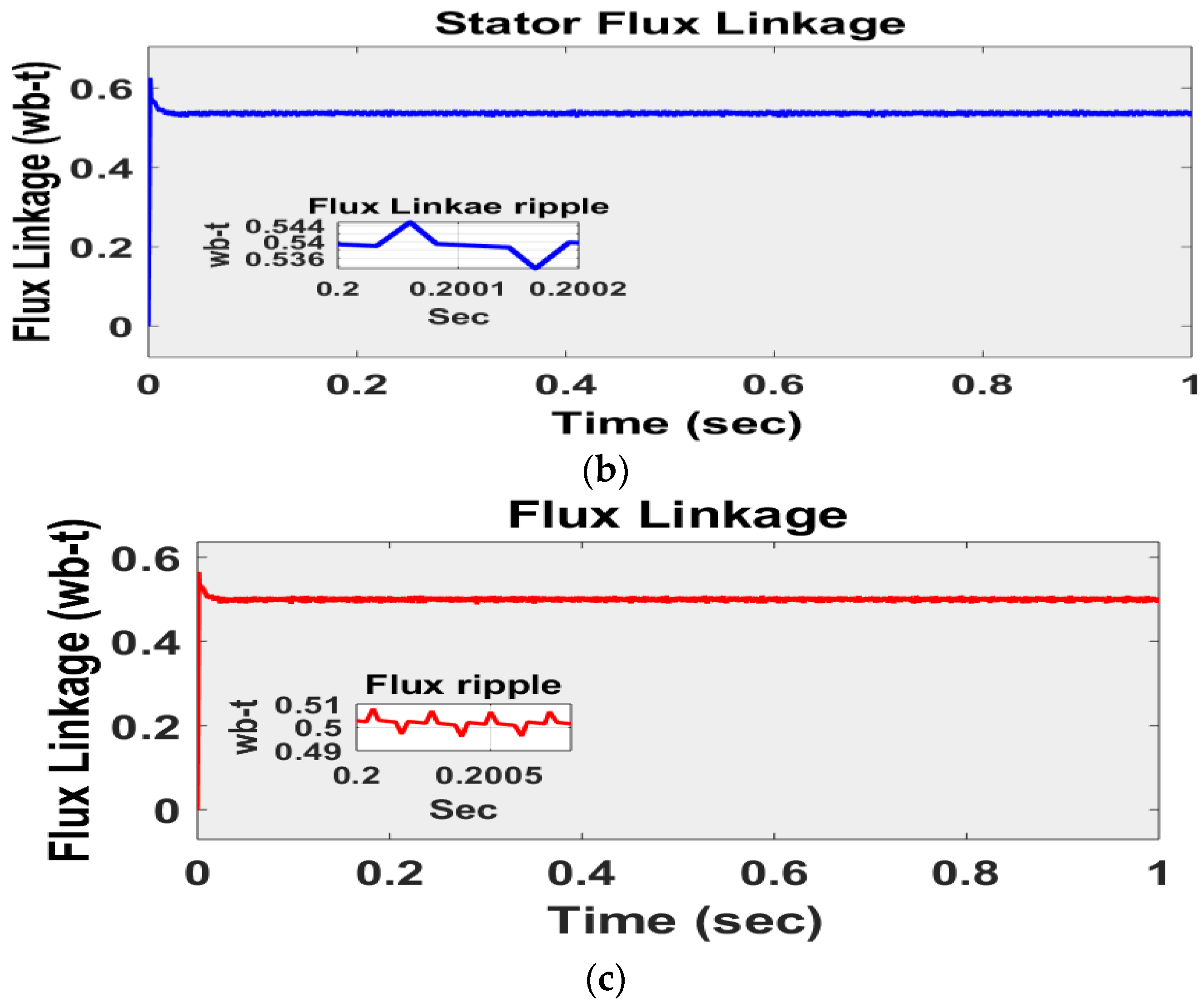
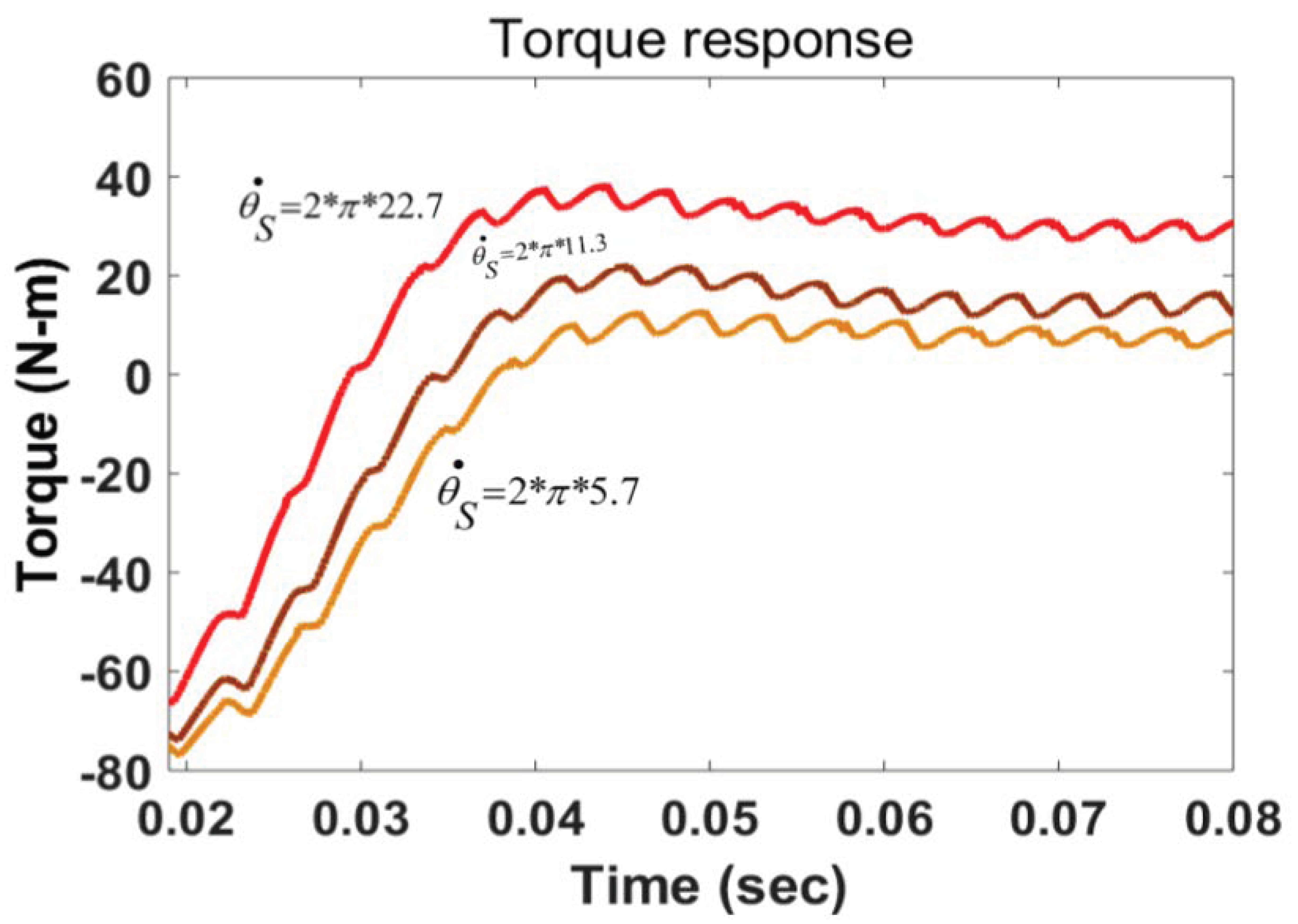
- Minimization of torque ripples during steady state;
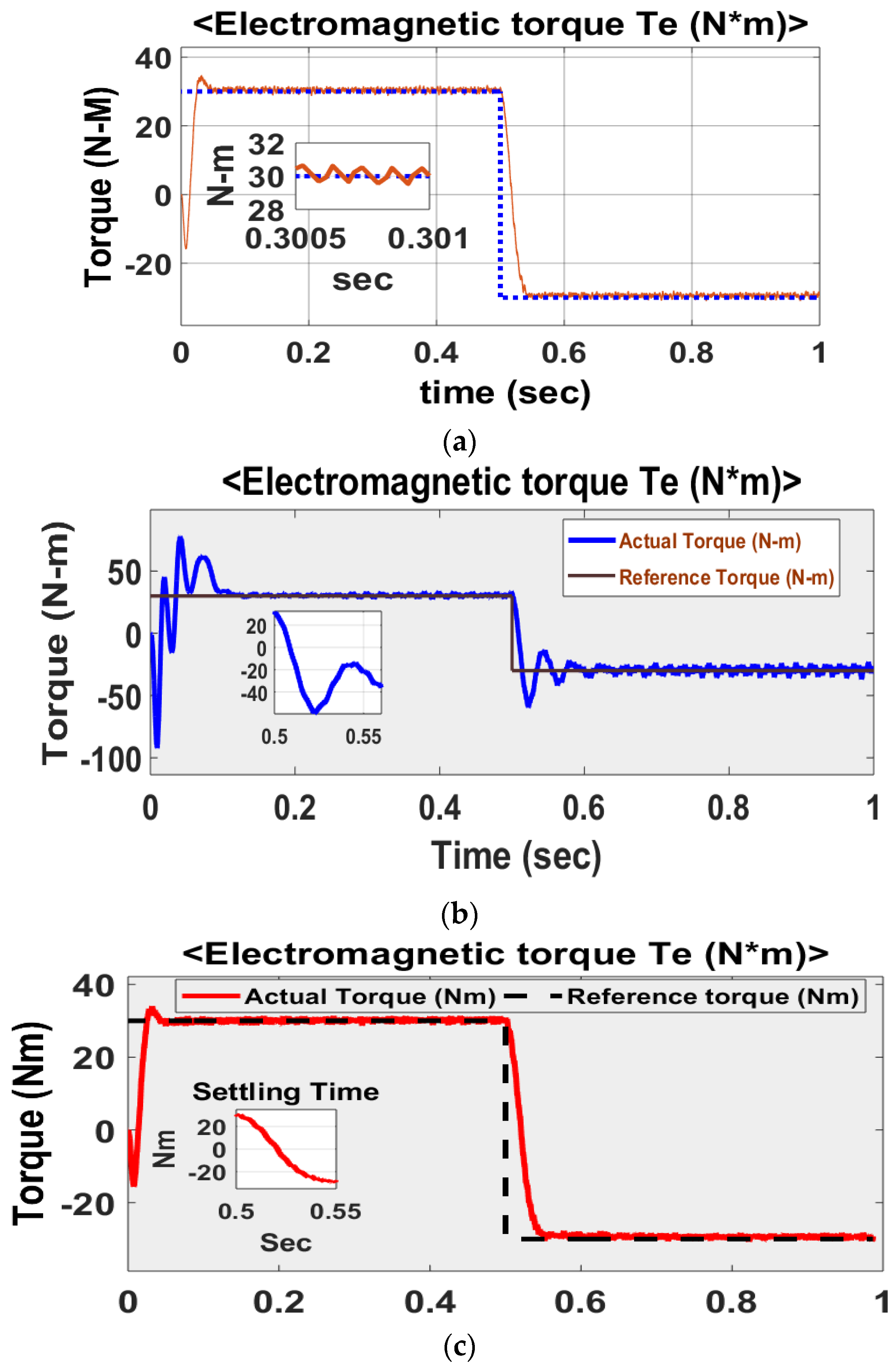
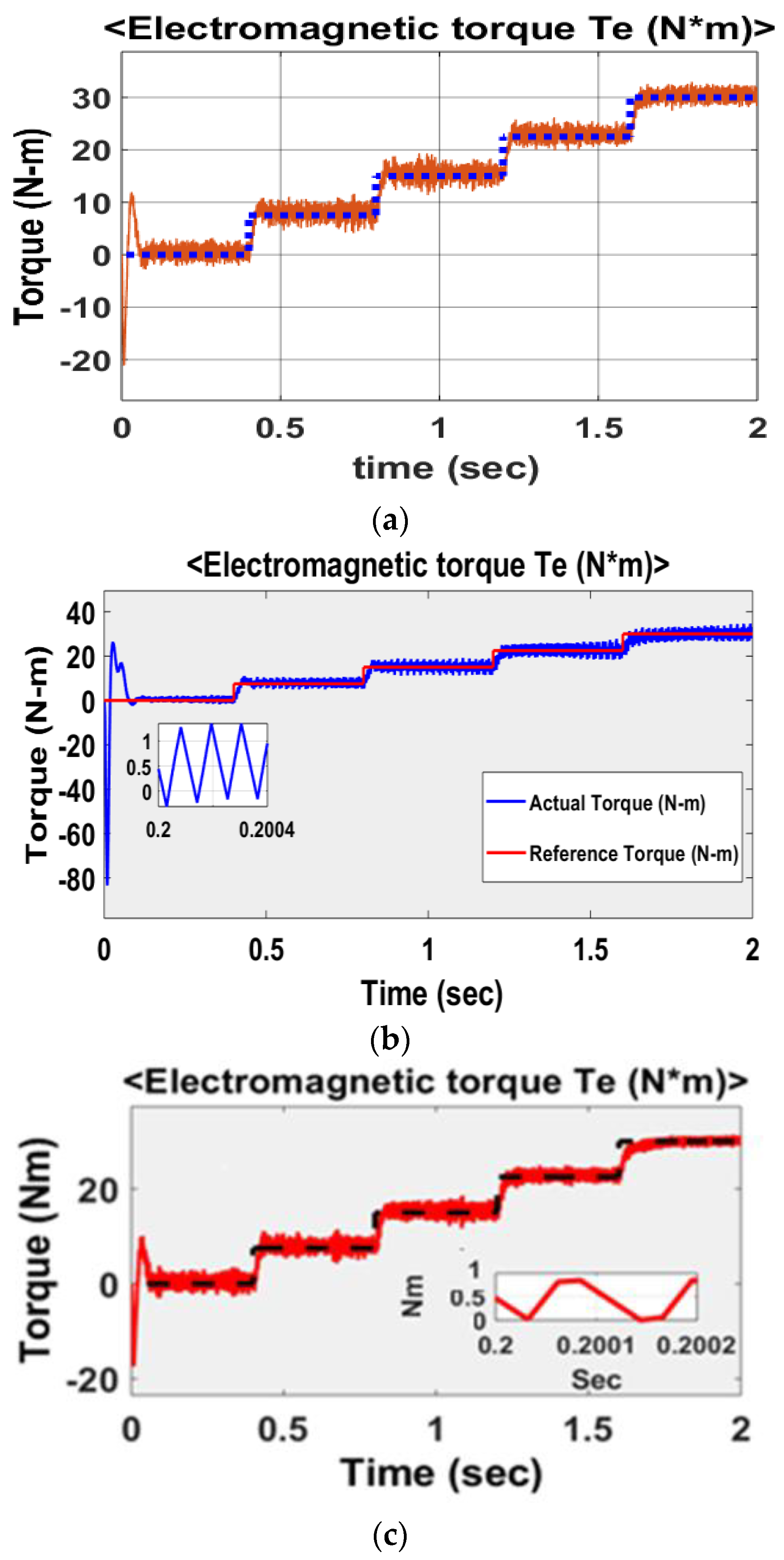
- Improved system response times during load-changing conditions;
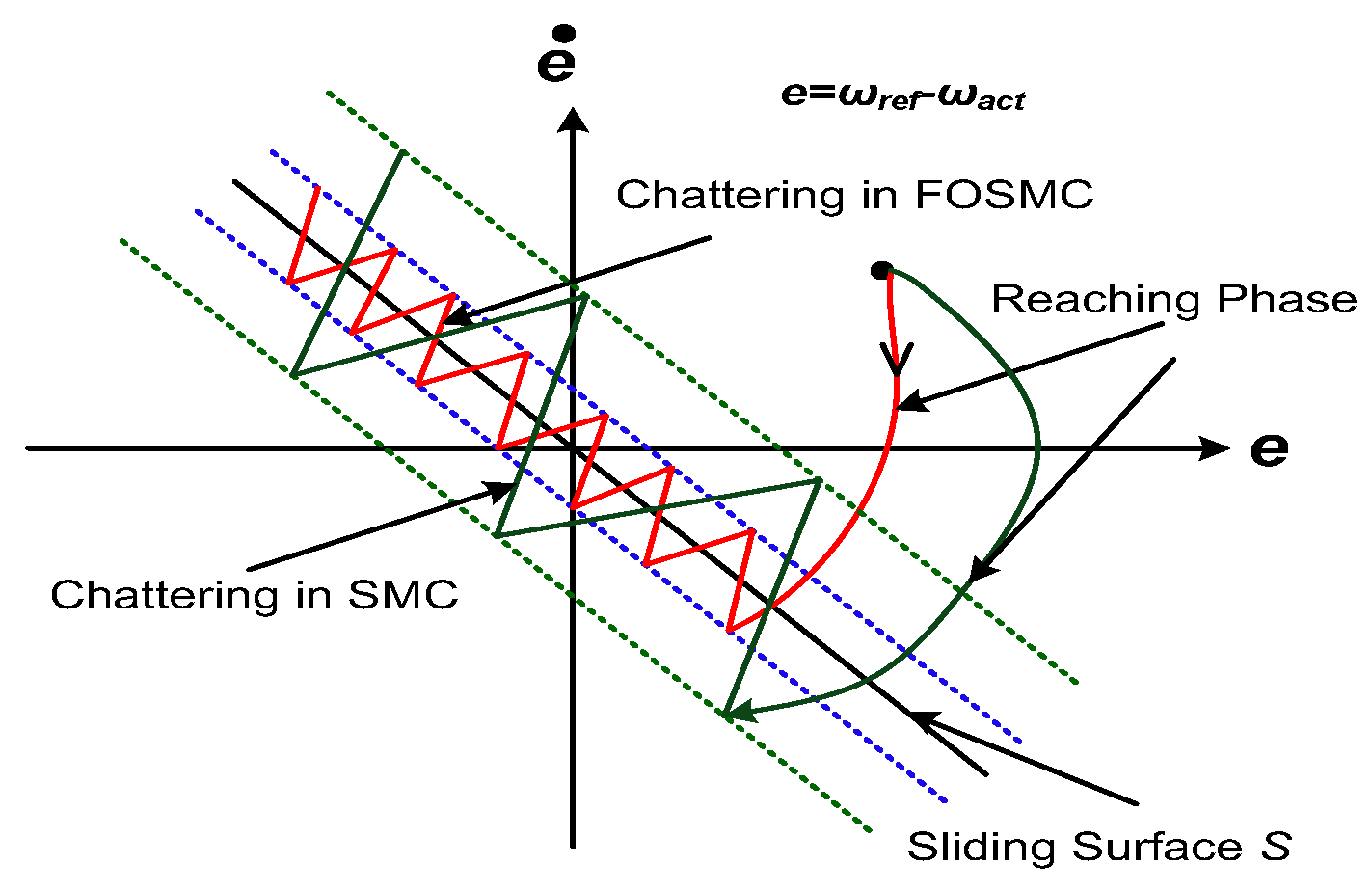
- Reduction of high-frequency chattering phenomenon;
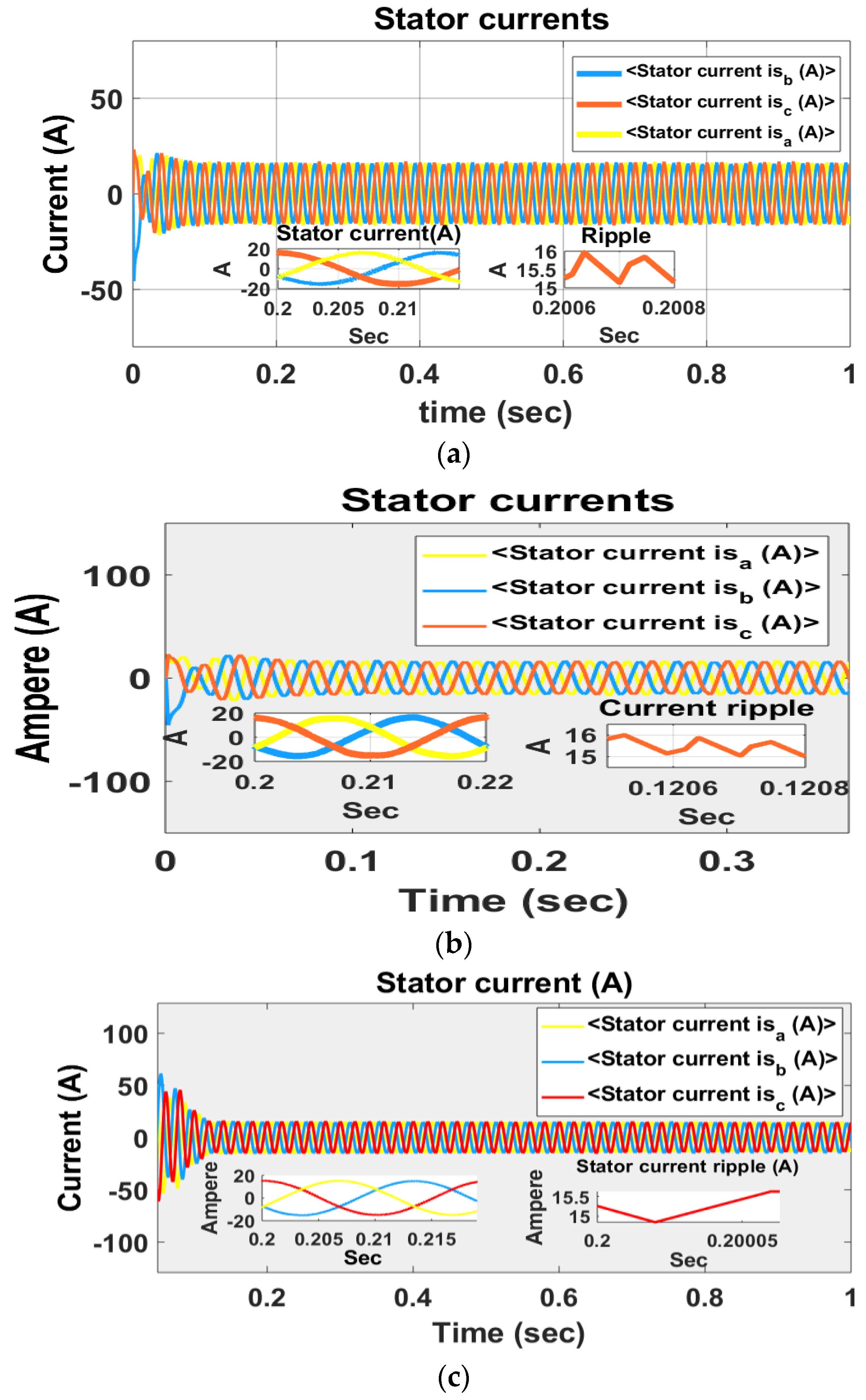
- Pure sinusoidal stator current waveform with fewer distortions in a 3-Φ IMD;
- Comparative analysis of the FOSMC-DTC, classical SMC, and PI controller methods.
2. Fractional-Order Sliding Mode Controller for Induction Motors
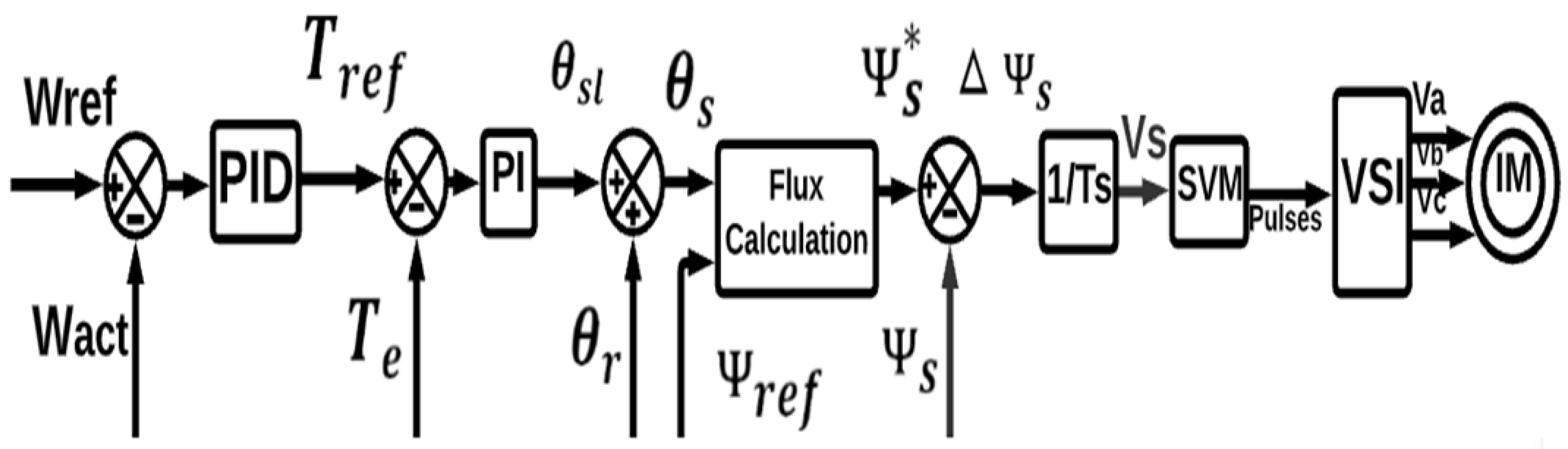
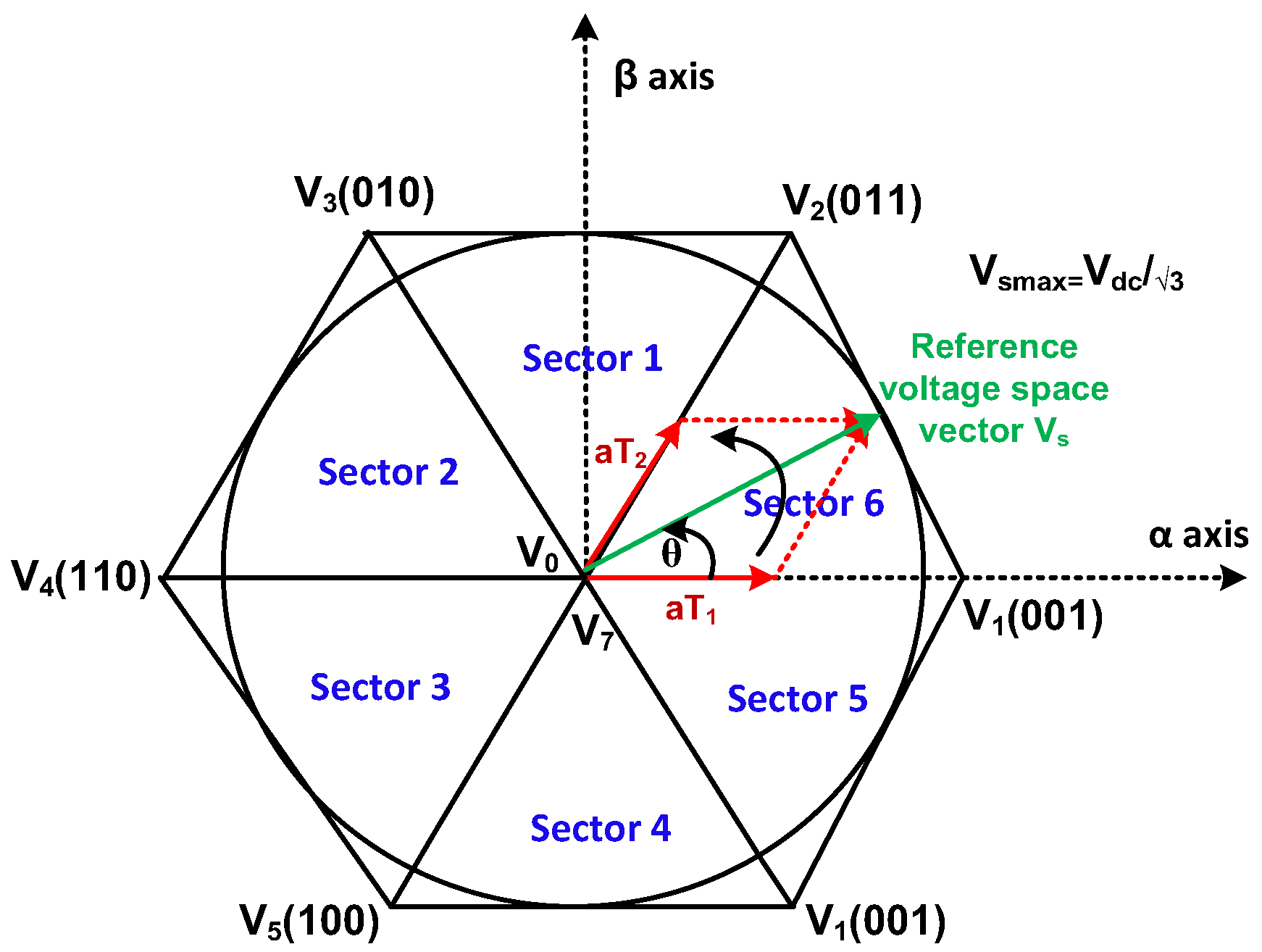
2.1. SVM-Based DTC Using Single PI Controller
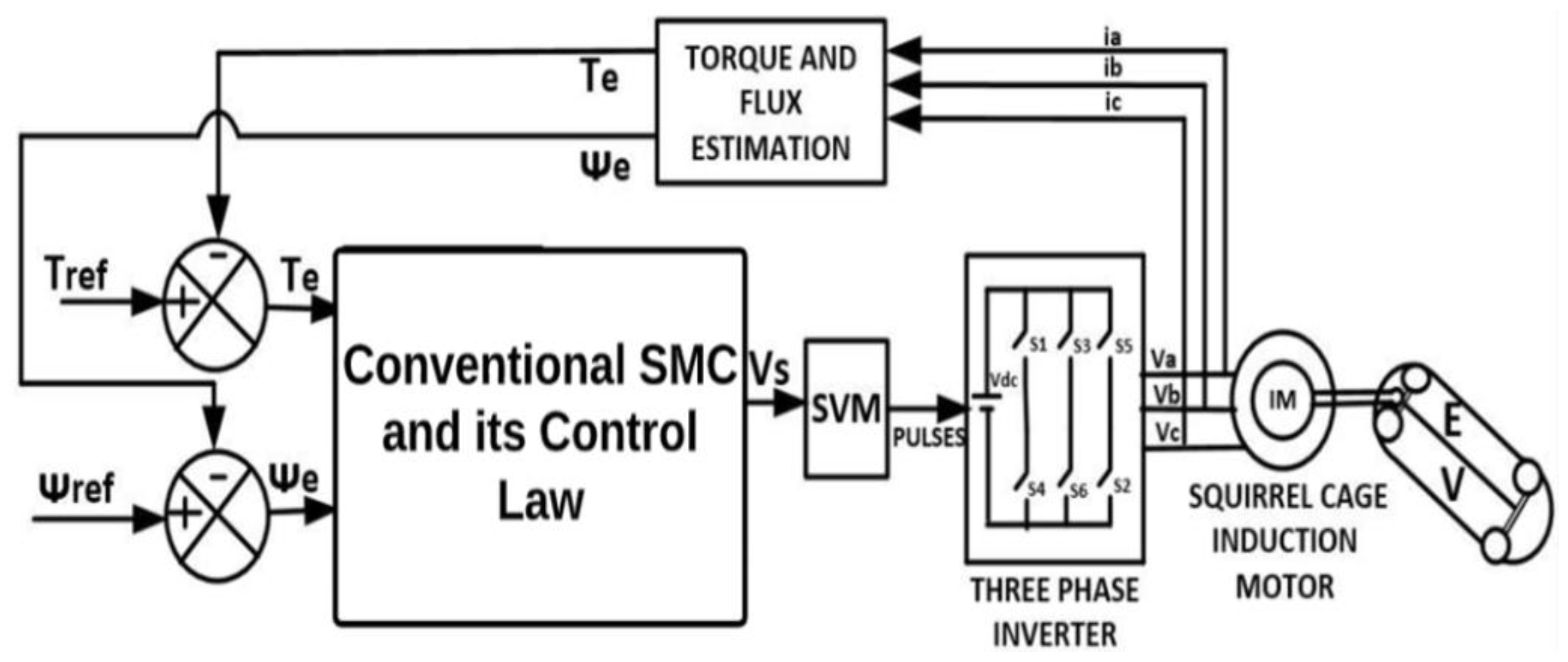
2.2. SVM-Based DTC with Conventional Sliding Mode Controller
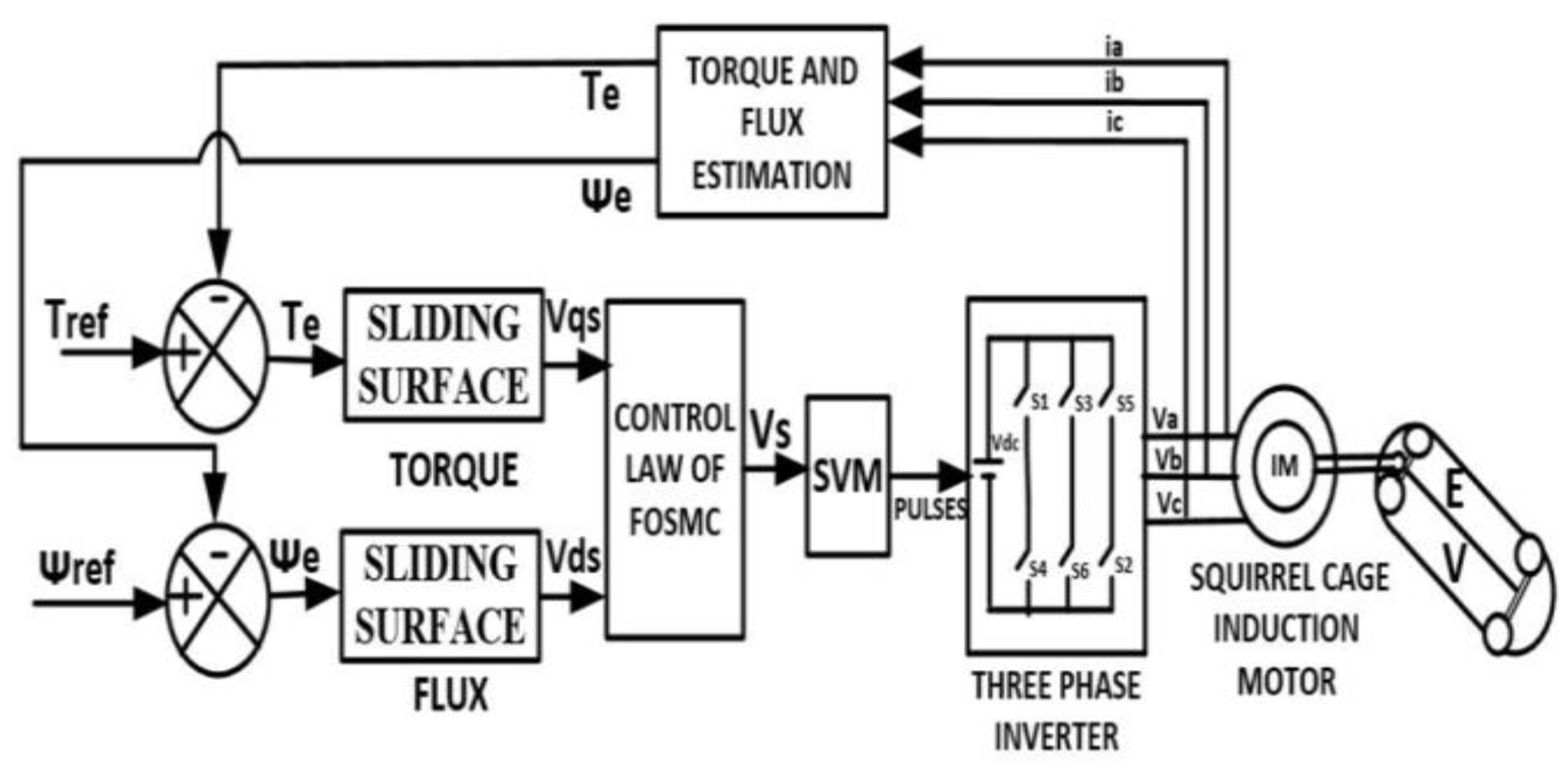
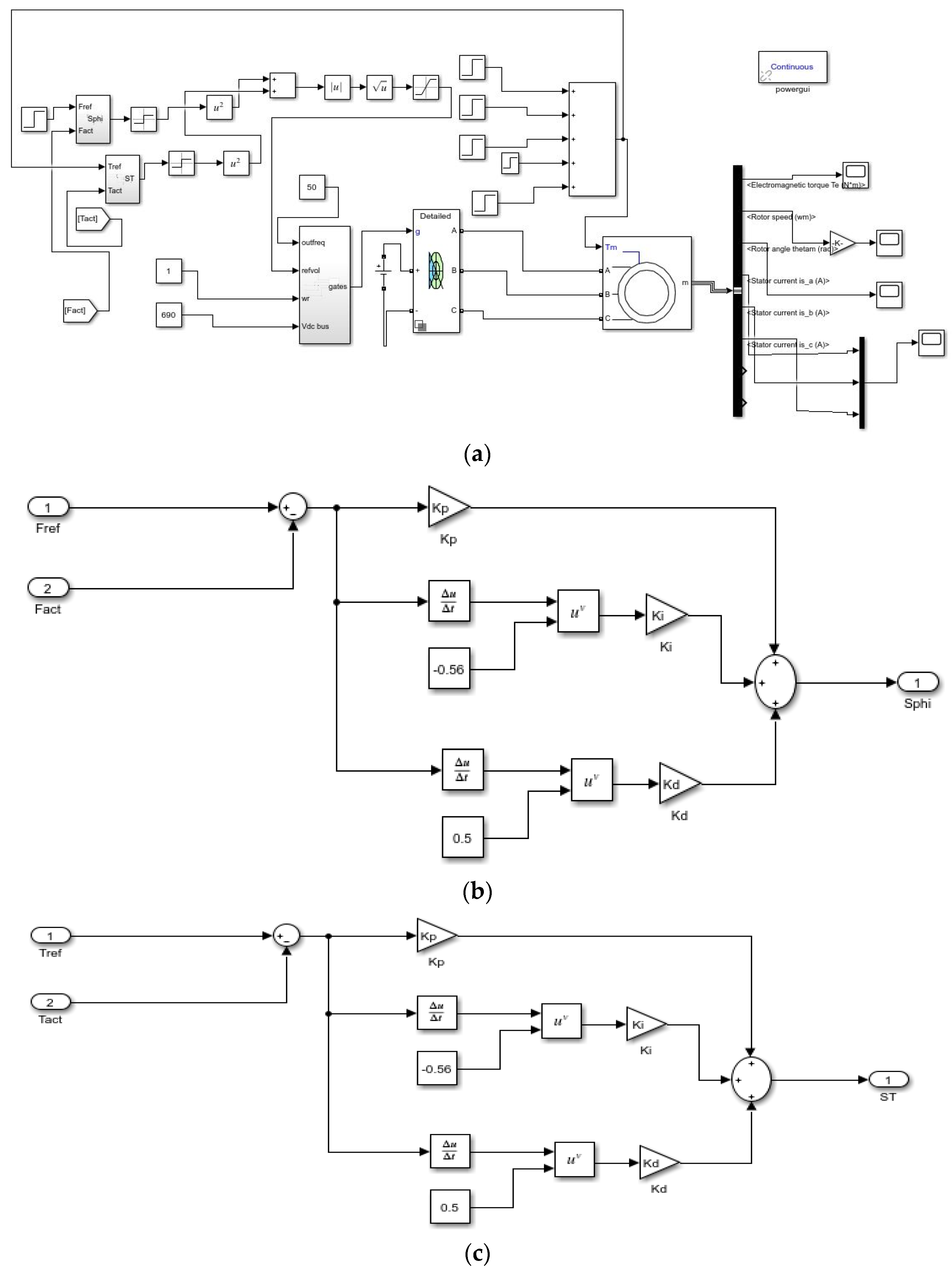
2.3. SVM-Based FOSMC-DTC of Induction Motors
3. Mathematical Model of FOSMC-DTC Scheme of IMD
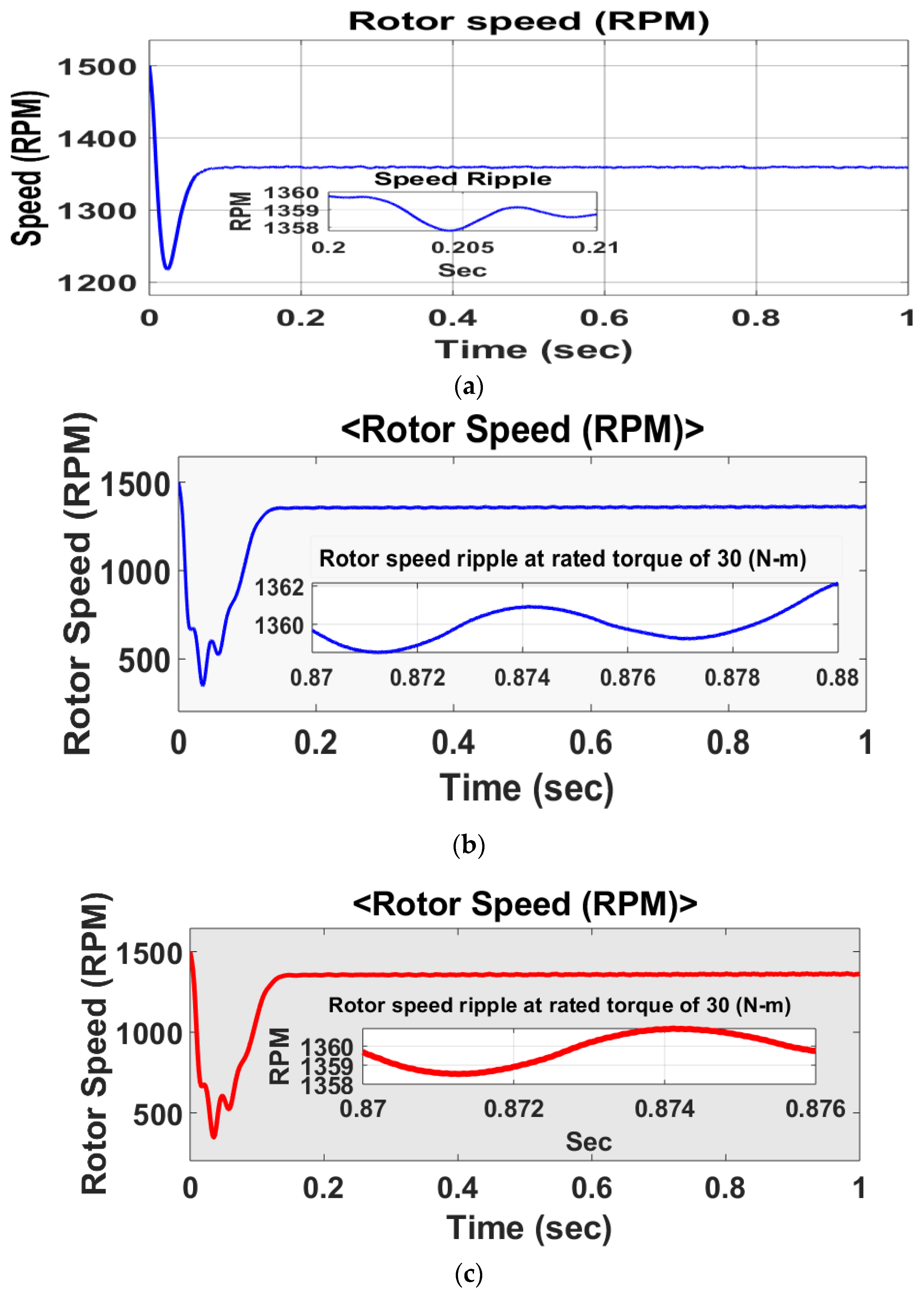
4. Simulation Results and Discussions
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| BLDC | Brushless DC motor |
| DTC | Direct torque control |
| EV | Electric vehicle |
| SPWM | Space vector pulse width modulation |
| SVM | Space vector modulation |
| PI | Proportional and integral |
| SMC | Sliding mode controller |
| HOSMC | Higher-order sliding mode controller |
| FOSMC | Fractional-order sliding mode controller |
| IMD | Induction motor drive |
| PMSM | permanent magnet synchronous motor drive |
| SRM | Switched reluctance motor |
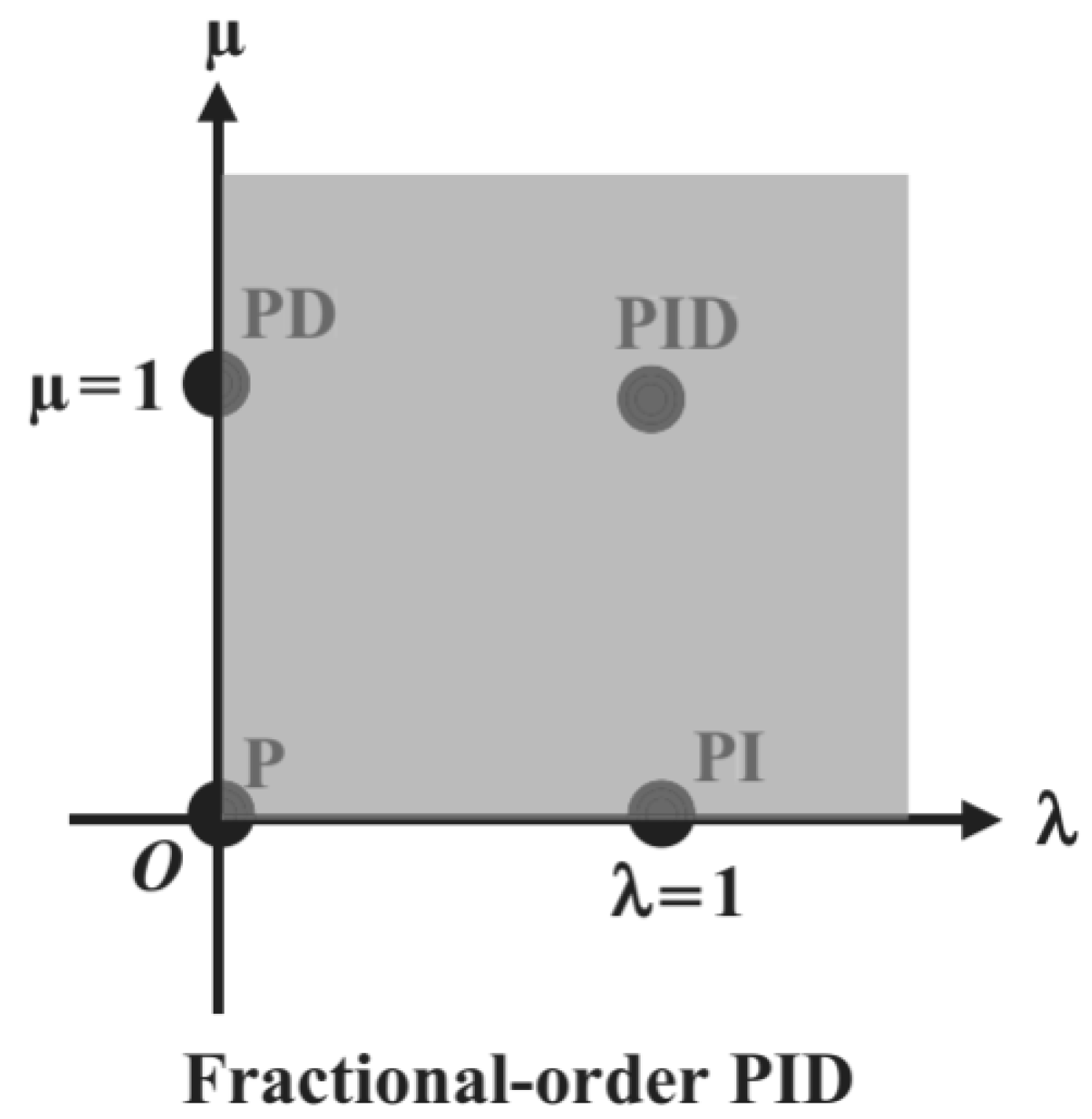
| PID | Proportional-integral controller |
| S | Sliding surface |
| Surface gradient | |
| u | Fractional-order derivative gain |
| λ | Fractional-order integral gain. |
| Desired speed | |
| Actual speed | |
| Surface gradient of torque control | |
| Surface gradient of flux control | |
| Electromechanical torque | |
| Load torque |
References
- Qianfan, Z.; Shumei, C.; Xinjia, T. Hybrid Switched Reluctance Motor Applied in Electric Vehicles. In Proceedings of the 2007 IEEE Vehicle Power and Propulsion Conference, Arlington, TX, USA, 9–12 September 2007; pp. 359–363. [Google Scholar]
- Kang, J.K.; Chung, D.W.; Sul, S.K. Direct Torque Control of Induction Machine with Variable Amplitude Control of Flux and Torque Hysteresis Bands. In Proceedings of the IEEE International Electric Machines and Drives Conference IEMDC’99, Seattle, WA, USA, 9–12 May 1999; pp. 640–642. [Google Scholar]
- Casadei, D.; Profumo, F.; Serra, G.; Tani, A. FOC and DTC: Two viable schemes for induction motors torque control. IEEE Trans. Power Electron. 2002, 17, 779–787. [Google Scholar] [CrossRef]
- Benchaib, A.; Edwards, C. Induction Motor Control Using Nonlinear Sliding Mode Theory. In Proceedings of the European Control Conference (ECC), Karlsruhe, Germany, 31 August–3 September 1999; pp. 779–784. [Google Scholar]
- Kuo-Kai, S.; Li-Jen, S.; Hwang-Zhi, C.; Ko-Wen, J. Flux compensated direct torque control of induction motor drives for low speed operation. IEEE Trans. Power Electron. 2004, 19, 1608–1613. [Google Scholar]
- Zhuang, S.; He, Y.; Wang, S. Fuzzy Sliding-Mode Speed Control with Torque Observer in Induction Motor Drive. In Proceedings of the 2006 6th World Congress on Intelligent Control and Automation, Dalian, China, 21–23 June 2006; pp. 8260–8264. [Google Scholar]
- Peng, K.; Zhao, J. Speed Control of Induction Motor Using Neural Network Sliding Mode Controller. In Proceedings of the 2011 International Conference on Electric Information and Control Engineering, Wuhan, China, 15–17 April 2011; pp. 6125–6129. [Google Scholar]
- Hiba, H.; Ali, H.; Othmen, H. DTC-SVM Control for Three Phase Induction Motors. In Proceedings of the 2013 International Conference on Electrical Engineering and Software Applications, Hammamet, Tunisia, 2–23 March 2013; pp. 1–7. [Google Scholar]
- Sung, G.; Lin, W.; Peng, S. Reduction of Torque and Flux Variations Using Fuzzy Direct Torque Control System in Motor Drive. In Proceedings of the 2013 IEEE International Conference on Systems, Man, and Cybernetics, Manchester, UK, 13–16 October 2013; pp. 1456–1460. [Google Scholar]
- Xing, Z.; Hong, Z.; Fei, L.; Fang, L.; Chun, L.; Benxuan, L. An LCL-LC Power Filter for Grid-Tied Inverter. In Proceedings of the TENCON IEEE Region 10 Conference, Xi’an, China, 22–25 October 2013; pp. 1–4. [Google Scholar]
- Zhao, S.; Yu, H.; Yu, J.; Shan, B. Induction Motor DTC Based on Adaptive SMC and Fuzzy Control. In Proceedings of the 27th Chinese Control and Decision Conference, Qingdao, China, 23–25 May 2015; pp. 4474–4479. [Google Scholar]
- Yang, Z.; Shang, F.; Brown, I.P.; Krishnamurthy, M. Comparative Study of Interior Permanent Magnet, Induction, and Switched Reluctance Motor Drives for EV and HEV Applications. IEEE Trans. Transp. Electrif. 2015, 1, 245–254. [Google Scholar] [CrossRef]
- Ammar, A.; Bourek, A.; Benakcha, A. Implementation of Robust SVM-DTC for Induction Motor Drive Using Second Order Sliding Mode Control. In Proceedings of the 2016 8th International Conference on Modelling, Identification and Control (ICMIC), Algiers, Algeria, 15–17 November 2016; pp. 338–343. [Google Scholar]
- Niu, F.; Han, Z.; Xu, W.; Huang, X.; Zhang, J.; Wu, L.; Fang, Y. A Simple Duty Cycle Modulated Direct Torque Control for Permanent Magnet Synchronous Motors. In Proceedings of the 20th International Conference on Electrical Machines and Systems, Sydney, Australia, 11–14 August 2017; pp. 1–4. [Google Scholar]
- Oukaci, A.; Toufouti, R.; Dib, D.; Atarsia, L. Comparison performance between sliding mode control and Nonlinear Control, Application to Induction Motor. Electr. Eng. 2017, 99, 33–45. [Google Scholar] [CrossRef]
- Wang, D.; Yuan, T.; Liu, Z.; Li, Y.; Wang, X.; Tian, W.; Miao, S.; Liu, J. Reduction of Torque and Flux Ripples for Robot Motion Control System Based on SVM-DTC. In Proceedings of the 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 5572–5576. [Google Scholar]
- Alsofyani, I.M.; Idris, N.R.N.; Lee, K. Dynamic Hysteresis Torque Band for Improving the Performance of Lookup-Table-Based DTC of Induction Machines. IEEE Trans. Power Electron. 2018, 33, 7959–7970. [Google Scholar] [CrossRef]
- Kumar, V.; Ali, I. Fractional order sliding mode approach for chattering free direct power control of DC/AC converter. IET Power Electron. 2019, 12, 3600–3610. [Google Scholar] [CrossRef]
- Babes, B.; Boutaghane, A.; Hamouda, N.; Mezaache, M. Design of a Robust Voltage Controller for a DC-DC Buck Converter Using Fractional-Order Terminal Sliding Mode Control Strategy. In Proceedings of the International Conference on Advanced Electrical Engineering, Algiers, Algeria, 19–21 November 2019; pp. 1–6. [Google Scholar]
- Saheb, S.; Gudey, S. Robust fractional order sliding mode control for solar based DC-AC inverter. J. Energy Syst. 2020, 4, 161–178. [Google Scholar] [CrossRef]
- Lascu, C.; Argeseanu, A.; Blaabjerg, F. Supertwisting Sliding-Mode Direct Torque and Flux Control of Induction Machine Drives. IEEE Trans. Power Electron. 2020, 35, 5057–5065. [Google Scholar] [CrossRef]
- Munoz-Hernandez, G.A.; Mino-Aguilar, G.; Guerrero-Castellanos, J.F.; Peralta-Sanchez, E. Fractional Order PI-Based Control Applied to the Traction System of an Electric Vehicle (EV). Appl. Sci. 2020, 10, 364. [Google Scholar] [CrossRef]
- Masoumkhani, H.; Taheri, A. PI Regulator-Based Duty Cycle Control to Reduce Torque and Flux Ripples in DTC of Six-Phase Induction Motor. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 354–370. [Google Scholar] [CrossRef]
- Sami, I.; Ullah, S.; Basit, A.; Ullah, N.; Ro, J.S. Integral Super Twisting Sliding Mode Based Sensorless Predictive Torque Control of Induction Motor. IEEE Access 2020, 8, 186740–186755. [Google Scholar] [CrossRef]
- Malla, M.; Gudey, S.K.; Sudha, S. Transient and Steady State Characteristics of Induction Motor Drive Using DTC-SVM Technique for EV Applications. In Proceedings of the 11th International Conference on Electrical and Computer Engineering (ICECE), Dhaka, Bangladesh, 17–19 December 2020; pp. 403–406. [Google Scholar]
- Xu, W.; Ali, M.M.; Elmorshedy, M.F.; Allam, S.M.; Mu, C. One Improved Sliding Mode DTC for Linear Induction Machines Based on Linear Metro. IEEE Trans. Power Electron. 2021, 36, 4560–4571. [Google Scholar] [CrossRef]
- Delavari, H.; Veisi, A. Robust Control of a Permanent Magnet Synchronous Generators based Wind Energy Conversion. In Proceedings of the 7th International Conference on Control, Instrumentation and Automation (ICCIA), Tabriz, Iran, 23–24 February 2021; pp. 1–5. [Google Scholar]
- Benbouhenni, H.; Bizon, N. Improved Rotor Flux and Torque Control Based on the Third-Order Sliding Mode Scheme Applied to the Asynchronous Generator for the Single-Rotor Wind Turbine. Mathematics 2021, 9, 2297. [Google Scholar] [CrossRef]
- Yu, X.; Yi, H.; Mao, Z. Spacecraft Attitude Tracking Control Based on MPC and Fractional-Order Sliding Mode Control. In Proceedings of the 2022 5th International Symposium on Autonomous Systems (ISAS), Hangzhou, China, 8–10 April 2022; pp. 1–6. [Google Scholar]
- Shiravani, F.; Alkorta, P.; Cortajarena, J.A.; Barambones, O. An Enhanced Sliding Mode Speed Control for Induction Motor Drives. Actuators 2022, 11, 18. [Google Scholar] [CrossRef]
- Kotb, H.; Yakout, A.H.; Attia, M.A.; Turky, R.A.; AboRas, K.M. Speed control and torque ripple minimization of SRM using local unimodal sampling and spotted hyena algorithms based cascaded PID controller. Ain Shams Eng. J. 2022, 13, 101719. [Google Scholar] [CrossRef]
- Yang, Z.; Wang, D.; Sun, X.; Wu, J. Speed sensorless control of a bearingless induction motor with combined neural network and fractional sliding mode. Mechatronics 2022, 82, 102721. [Google Scholar] [CrossRef]
- De Klerk, M.L.; Saha, A.K. Performance analysis of DTC-SVM in a complete traction motor control mechanism for a battery electric vehicle. Heliyon 2022, 8, e09265. [Google Scholar] [CrossRef] [PubMed]
- Wang, T.; Wang, B.; Yu, Y.; Xu, D. Discrete Sliding-Mode-Based MRAS for Speed-Sensorless Induction Motor Drives in the High-Speed Range. IEEE Trans. Power Electron. 2023, 38, 5777–5790. [Google Scholar] [CrossRef]
- Adigintla, S.; Aware, M.V. Robust Fractional Order Speed Controllers for Induction Motor under Parameter Variations and Low Speed Operating Regions. IEEE Trans. Circuits Syst. II Express Briefs 2023, 70, 1119–1123. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rating of the Induction Motor, P | 5.4 HP |
|---|---|
| Voltage (L-L), Vrms | 440 V |
| Power frequency, fs | 50 Hz |
| Rated torque, T | 30 N-m |
| Rated current (Peak) | 16 A |
| Nominal speed, Nnom | 1430 rpm |
| Controller Parameters | Flux Sliding Surface | Torque Sliding Surface |
|---|---|---|
| λ | 0.5 | 0.56 |
| u | 0.45 | 0.5 |
| kP | 1.5 | 5.0 |
| kI | 0.1 | 0.1 |
| kD | 1.0 | 1.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gudey, S.K.; Malla, M.; Jasthi, K.; Gampa, S.R. Direct Torque Control of an Induction Motor Using Fractional-Order Sliding Mode Control Technique for Quick Response and Reduced Torque Ripple. World Electr. Veh. J. 2023, 14, 137. https://doi.org/10.3390/wevj14060137
Gudey SK, Malla M, Jasthi K, Gampa SR. Direct Torque Control of an Induction Motor Using Fractional-Order Sliding Mode Control Technique for Quick Response and Reduced Torque Ripple. World Electric Vehicle Journal. 2023; 14(6):137. https://doi.org/10.3390/wevj14060137
Chicago/Turabian StyleGudey, Satish Kumar, Mohan Malla, Kiran Jasthi, and Srinivasa Rao Gampa. 2023. "Direct Torque Control of an Induction Motor Using Fractional-Order Sliding Mode Control Technique for Quick Response and Reduced Torque Ripple" World Electric Vehicle Journal 14, no. 6: 137. https://doi.org/10.3390/wevj14060137