
Unlocking Digitalization in Forest Operations with Viewshed Analysis to Improve GNSS Positioning Accuracy

 ,
,  , , ,
, , ,
Abstract
:1. Introduction
2. Materials and Methods
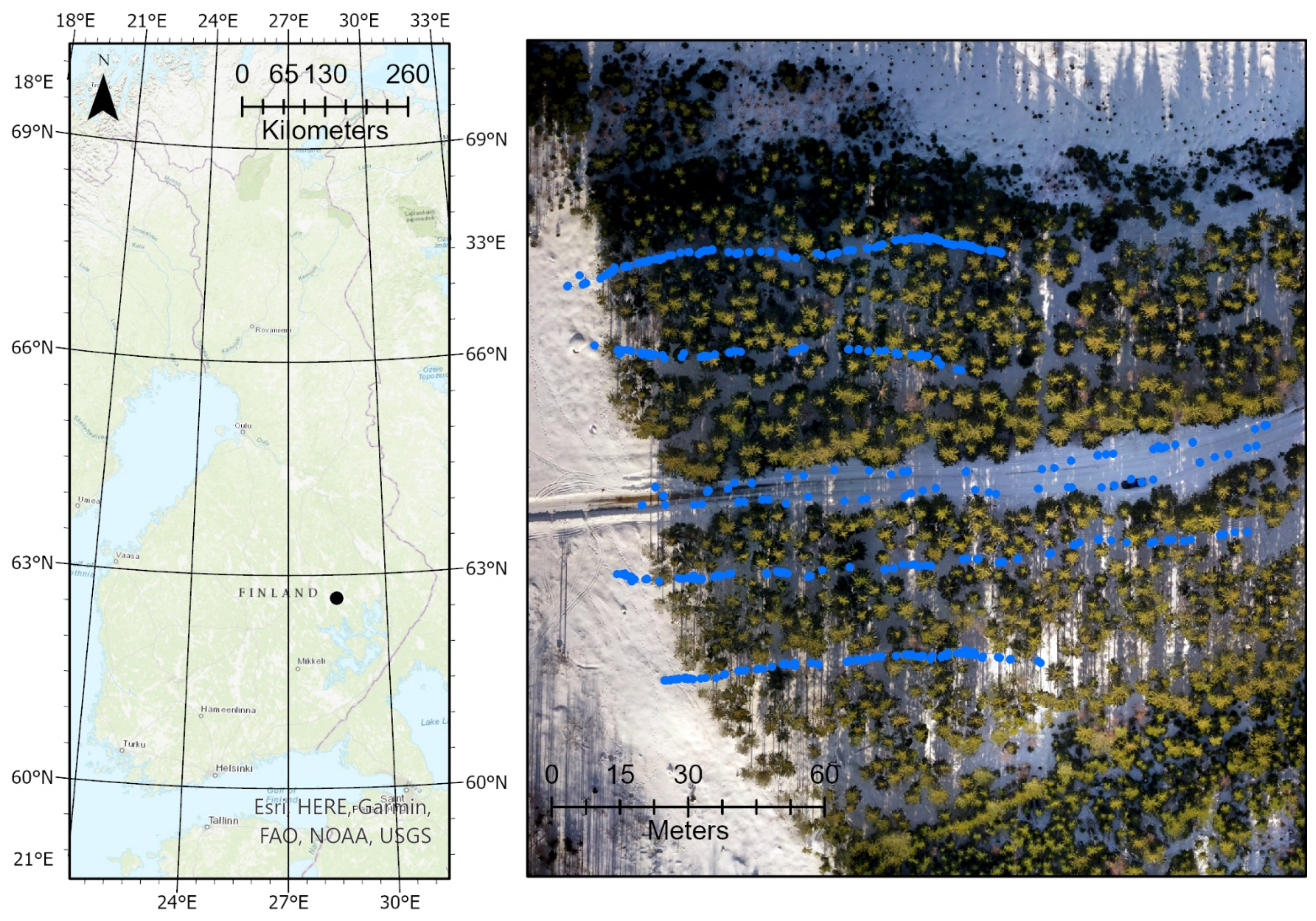
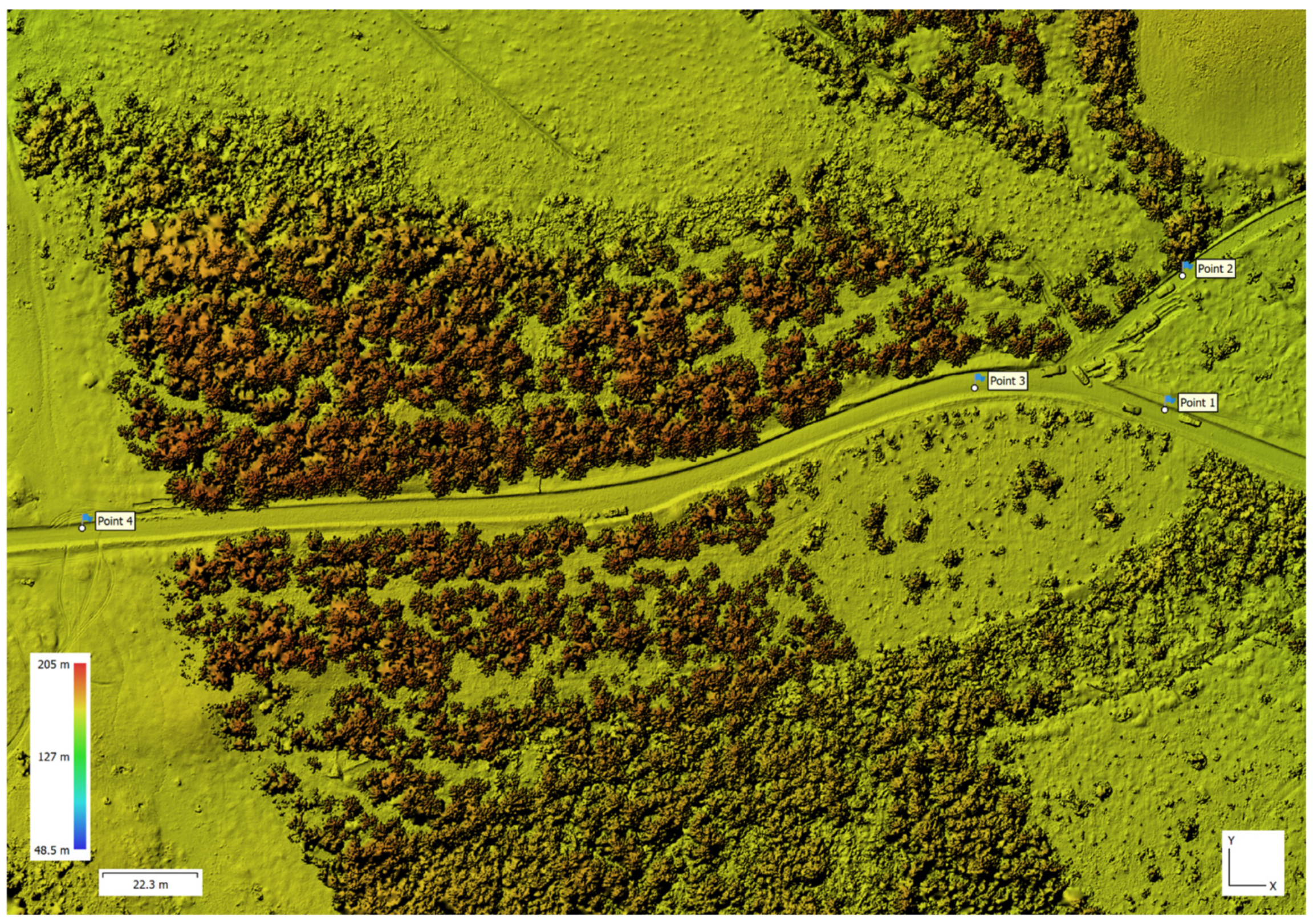
2.1. Study Area and Harvester Positions Data
- Inclination correction was disabled;
- Position was measured at a frequency of 1 s;
- The altitude mask was set to 10 degrees;
- The PDOP mask was set to 25.5;
- Horizontal and vertical tolerance were set to 99,999.9, which essentially disabled these parameters;
- The R12 device incorporates a feature called “xFill”, which attempts to obtain RTK correction via a satellite data link if it cannot be obtained through 2G/3G.
2.2. Canopy Cover Data
2.3. Analysis of Harvester Positions and Canopy Cover
3. Results
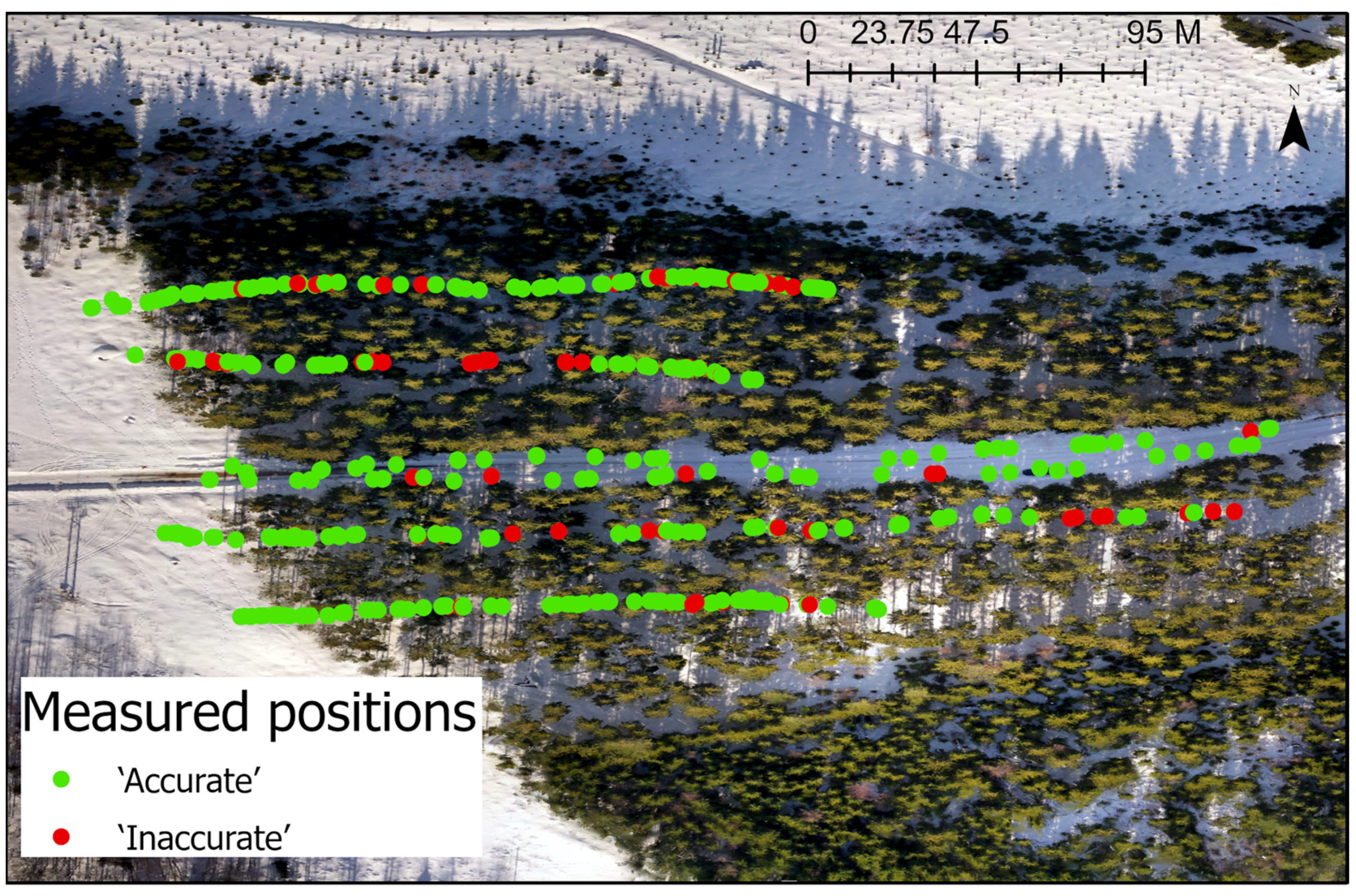
3.1. Assessment of the Positioning Accuracy of the Trimble R12 GNSS Receiver Mounted on a Harvester
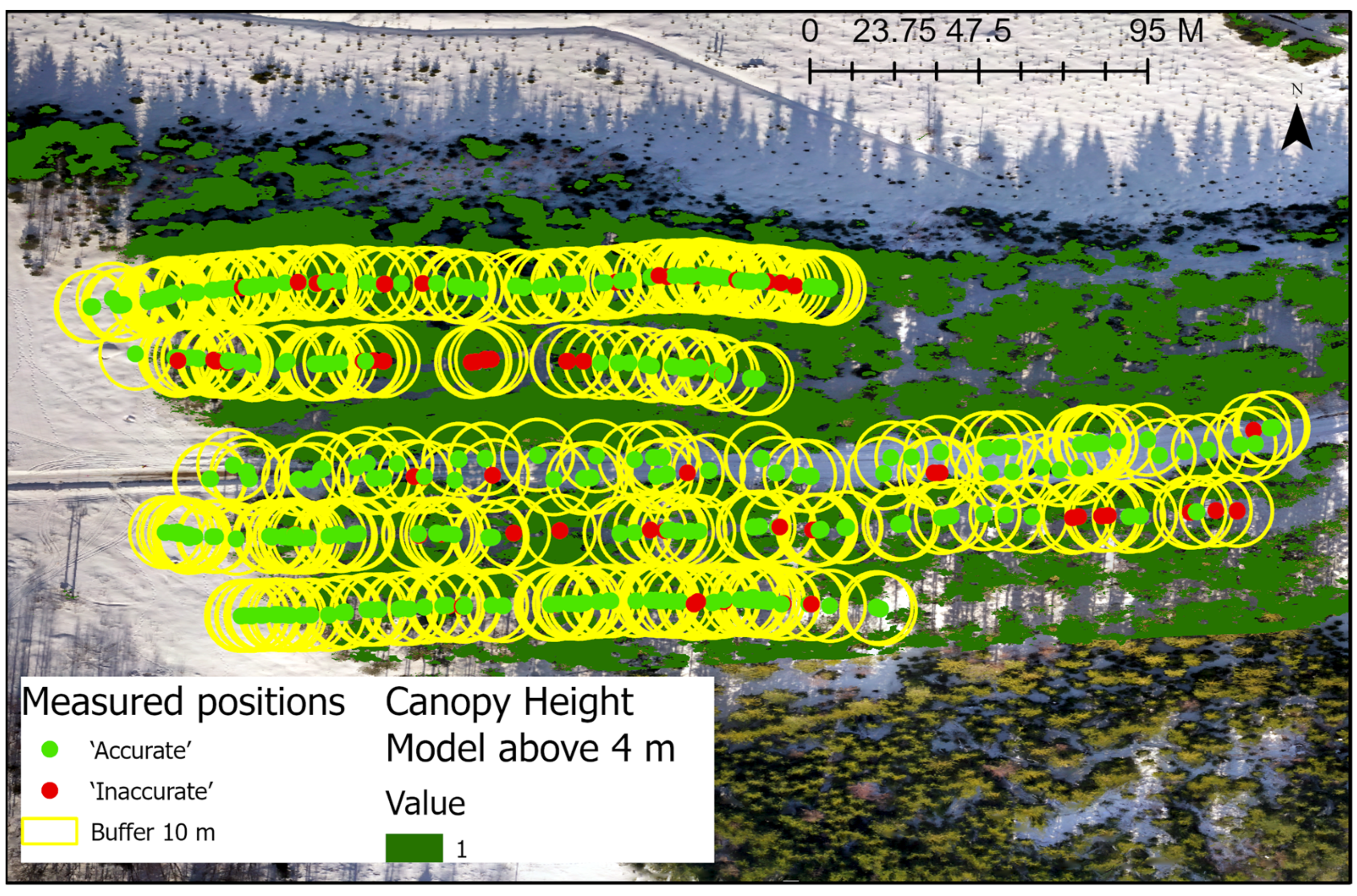
3.2. The Effect of Canopy Cover on the Position Accuracy of the Trimble R12 as Evaluated by Analyzing the Canopy Height Model
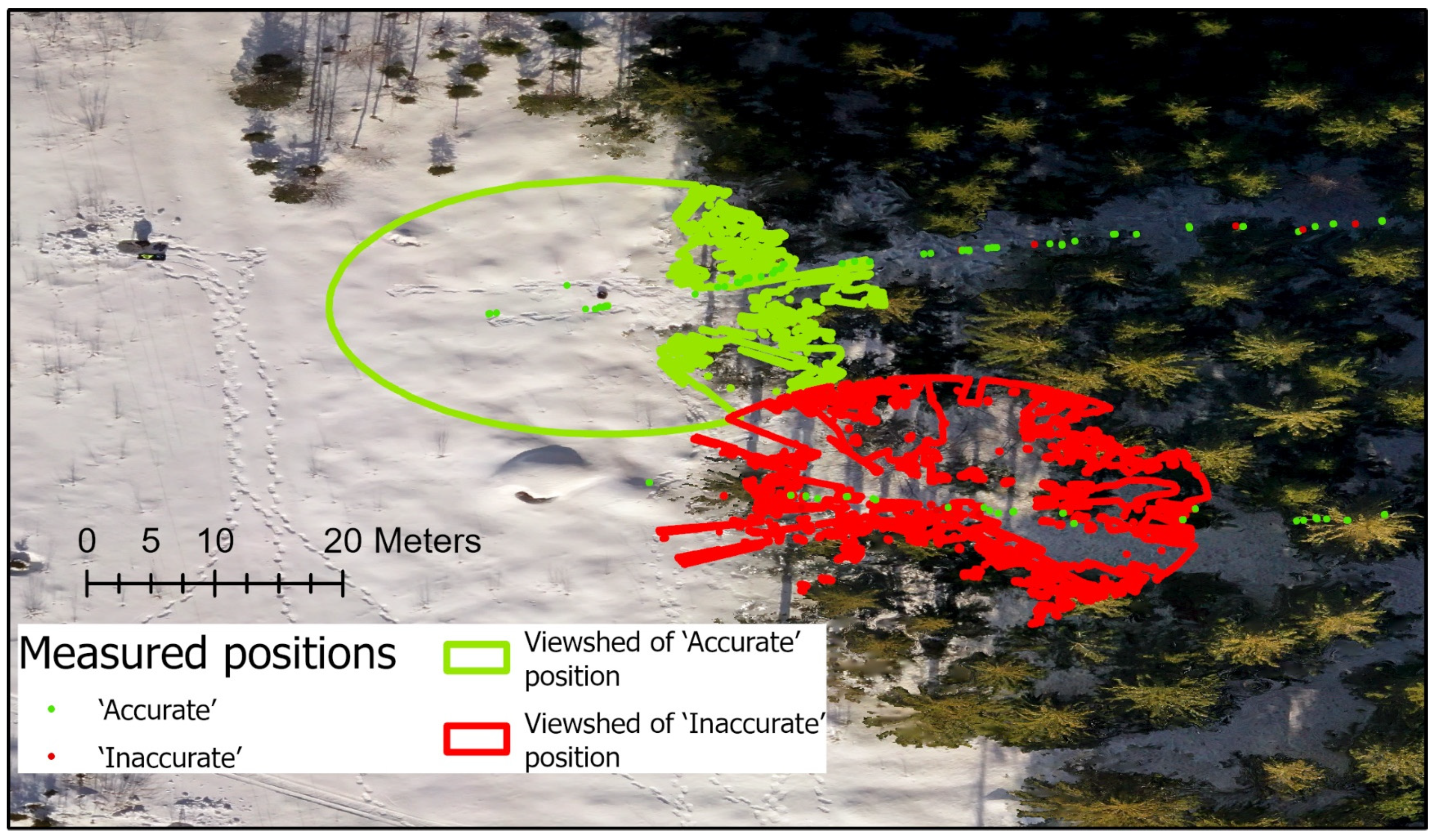
3.3. The Impact of Canopy Cover on the Positional Accuracy of the Trimble R12 as Evaluated by Conducting a Viewshed Analysis of the Digital Surface Model
4. Discussion
- Conduct long-term field studies to monitor the GNSS’s accuracy over time under different weather and foliage conditions;
- Investigate the use of GNSS signal enhancement techniques—for example, GNSS reflectometry—to improve the accuracy under canopy cover;
- Apply machine learning algorithms to GNSS data to predict the accuracy based on foliage density and tree height, and evaluate the effectiveness in real-world applications;
- Investigate integrating the GNSS with other sensors, such as LiDAR and cameras, to improve accuracy under canopy cover;
- Use a priori forest models/tree maps, e.g., from ALS and integrated LiDAR SLAM, to replace the need for a total station for practical long-term studies and forestry practice (1).
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pawar, K.V.; Rothkar, R.V. Forest Conservation & Environmental Awareness. Procedia Earth Planet. Sci. 2015, 11, 212–215. [Google Scholar] [CrossRef] [Green Version]
- Keenan, R.J. Climate Change Impacts and Adaptation in Forest Management: A Review. Ann. For. Sci. 2015, 72, 145–167. [Google Scholar] [CrossRef] [Green Version]
- Sirén, M.; Salmivaara, A.; Ala-Ilomäki, J.; Launiainen, S.; Lindeman, H.; Uusitalo, J.; Sutinen, R.; Hänninen, P. Predicting Forwarder Rut Formation on Fine-Grained Mineral Soils. Scand. J. For. Res. 2019, 34, 145–154. [Google Scholar] [CrossRef]
- Sigrist, P.; Coppin, P.; Hermy, M. Impact of Forest Canopy on Quality and Accuracy of GPS Measurements. Int. J. Remote Sens. 1999, 20, 3595–3610. [Google Scholar] [CrossRef]
- Holden, N.M.; Martin, A.A.; Owende, P.M.O.; Ward, S.M. A Method for Relating GPS Performance to Forest Canopy. Int. J. For. Eng. 2001, 12, 51–56. [Google Scholar] [CrossRef]
- Naesset, E.; Jonmeister, T. Assessing Point Accuracy of DGPS under Forest Canopy before Data Acquisition, in the Field and after Postprocessing. Scand. J. For. Res. 2002, 17, 351–358. [Google Scholar] [CrossRef]
- Piedallu, C.; Gégout, J.-C. Effects of Forest Environment and Survey Protocol on GPS Accuracy. Photogramm. Eng. Remote Sens. 2005, 71, 1071–1078. [Google Scholar] [CrossRef]
- Kaartinen, H.; Hyyppä, J.; Vastaranta, M.; Kukko, A.; Jaakkola, A.; Yu, X.; Pyörälä, J.; Liang, X.; Liu, J.; Wang, Y.; et al. Accuracy of Kinematic Positioning Using Global Satellite Navigation Systems under Forest Canopies. Forests 2015, 6, 3218–3236. [Google Scholar] [CrossRef]
- Uzodinma, V.N.; Nwafor, U. Degradation of GNSS Accuracy by Multipath and Tree Canopy Distortions in a School Environment. Asian J. Appl. Sci. 2018, 6, 4. [Google Scholar] [CrossRef] [Green Version]
- Feng, T.; Chen, S.; Feng, Z.; Shen, C.; Tian, Y. Effects of Canopy and Multi-Epoch Observations on Single-Point Positioning Errors of a GNSS in Coniferous and Broadleaved Forests. Remote Sens. 2021, 13, 2325. [Google Scholar] [CrossRef]
- Abdi, O.; Uusitalo, J.; Pietarinen, J.; Lajunen, A. Evaluation of Forest Features Determining GNSS Positioning Accuracy of a Novel Low-Cost, Mobile RTK System Using LiDAR and TreeNet. Remote Sens. 2022, 14, 2856. [Google Scholar] [CrossRef]
- Nuutinen, Y.; Väätäinen, K.; Asikainen, A.; Prinz, R.; Heinonen, J. Operational Efficiency and Damage to Sawlogs by Feed Rollers of the Harvester Head. Silva Fenn. 2010, 44, 121–139. [Google Scholar] [CrossRef] [Green Version]
- Boncina, A. History, Current Status and Future Prospects of Uneven-Aged Forest Management in the Dinaric Region: An Overview. Forestry 2011, 84, 467–478. [Google Scholar] [CrossRef]
- Puettmann, K.J.; Wilson, S.M.; Baker, S.C.; Donoso, P.J.; Drössler, L.; Amente, G.; Harvey, B.D.; Knoke, T.; Lu, Y.; Nocentini, S.; et al. Silvicultural Alternatives to Conventional Even-Aged Forest Management—What Limits Global Adoption? For. Ecosyst. 2015, 2, 8. [Google Scholar] [CrossRef] [Green Version]
- Mason, W.L.; Diaci, J.; Carvalho, J.; Valkonen, S. Continuous Cover Forestry in Europe: Usage and the Knowledge Gaps and Challenges to Wider Adoption. Forestry 2022, 95, 1–12. [Google Scholar] [CrossRef]
- Korosuo, A.; Sandström, P.; Öhman, K.; Eriksson, L.O. Impacts of Different Forest Management Scenarios on Forestry and Reindeer Husbandry. Scand. J. For. Res. 2014, 29, 234–251. [Google Scholar] [CrossRef]
- Mason, W.L. Implementing Continuous Cover Forestry in Planted Forests: Experience with Sitka Spruce (Picea Sitchensis) in the British Isles. Forests 2015, 6, 879–902. [Google Scholar] [CrossRef] [Green Version]
- Luguza, S.; Snepsts, G.; Donis, J.; Desaine, I.; Baders, E.; Kitenberga, M.; Elferts, D.; Jansons, A. Advance Regeneration of Norway Spruce and Scots Pine in Hemiboreal Forests in Latvia. Forests 2020, 11, 215. [Google Scholar] [CrossRef] [Green Version]
- Hahn, T.; Eggers, J.; Subramanian, N.; Toraño Caicoya, A.; Uhl, E.; Snäll, T. Specified Resilience Value of Alternative Forest Management Adaptations to Storms. Scand. J. For. Res. 2021, 36, 585–597. [Google Scholar] [CrossRef]
- Fagerberg, N.; Lohmander, P.; Eriksson, O.; Olsson, J.-O.; Poudel, B.C.; Bergh, J. Evaluation of Individual-Tree Growth Models for Picea Abies Based on a Case Study of an Uneven-Sized Stand in Southern Sweden. Scand. J. For. Res. 2022, 37, 45–58. [Google Scholar] [CrossRef]
- Peltomaa, E.; Könönen, M.; Palviainen, M.; Laurén, A.; Zhu, X.; Kinnunen, N.; Aaltonen, H.; Ojala, A.; Pumpanen, J. Impact of Forest Harvesting Intensity and Water Table on Biodegradability of Dissolved Organic Carbon in Boreal Peat in an Incubation Experiment. Forests 2022, 13, 599. [Google Scholar] [CrossRef]
- TOPODRONE DJI Mavic 2 Pro PPK Upgrade Kit. Available online: https://topodrone.com/product/ppk/185/1089/ (accessed on 14 February 2023).
- Reach RS2+ by Emlid|Multi-Band RTK GNSS Receiver for Mapping. Available online: https://emlid.com/reachrs2plus/ (accessed on 14 February 2023).
- TOPODRONE PPK Post Processing Perpetual License. Available online: https://topodrone.com/product/software/193/1071/ (accessed on 14 February 2023).
- Agisoft Metashape: Professional Edition. Available online: https://www.agisoft.com/features/professional-edition/ (accessed on 14 February 2023).
- Chen, Y.; Zhu, L.; Tang, J.; Pei, L.; Kukko, A.; Wang, Y.; Hyyppä, J.; Hyyppä, H. Feasibility Study of Using Mobile Laser Scanning Point Cloud Data for GNSS Line of Sight Analysis. Mob. Inf. Syst. 2017, 2017, e5407605. [Google Scholar] [CrossRef] [Green Version]
- Viewshed (Spatial Analyst)—ArcGIS Pro|Documentation. Available online: https://pro.arcgis.com/en/pro-app/latest/tool-reference/spatial-analyst/viewshed.htm (accessed on 14 February 2023).
- Trimble R12|Integrated GNSS Systems|Trimble Geospatial. Available online: https://geospatial.trimble.com/products-and-solutions/trimble-r12 (accessed on 9 February 2023).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technical Specification | Description |
|---|---|
| GNSS signals received | GPS L1, L2, L2C, L5; GLONASS L1, L2, L3; Galileo E1, E5a, E5b, E6; BeiDou B1, B2, B3; QZSS L1, L2C, L5, L6; NavIC L5 |
| Channels | 672 |
| Positioning modes | RTK, DGNSS, Static, Rapid Static, PPP |
| RTK accuracy | 8 mm + 0.5 ppm horizontal; 15 mm + 0.5 ppm vertical |
| DGNSS accuracy | 30 cm (95% confidence) |
| Time to first fix (TTFF) | Cold start: <60 s; warm start: <30 s; hot start: <10 s |
| Data update rate | Up to 20 Hz |
| Operating temperature range | −40 °C to +75 °C |
| Storage temperature range | −40 °C to +80 °C |
| IP rating | IP68 (protected against dust, sand, and temporary immersion in water) |
| Battery life | Up to 10 h (RTK Rover) |
| Bluetooth | Bluetooth 4.0 and 2.1 + EDR compliant |
| Size | 17.8 cm × 11.4 cm × 4.4 cm |
| Weight | 1.07 kg (with internal battery) |
| Variable | ‘Accurate’ (n = 4813) | ‘Inaccurate’ (n = 751) | t | df | ||||
|---|---|---|---|---|---|---|---|---|
| Mean | Std. dev. | Range | Mean | Std. dev. | Range | |||
| Number of GLONASS satellites | 3.90 | 1.27 | 0–7 | 3.23 | 1.07 | 1–6 | 15.30 | 1103 |
| Number of GPS satellites | 7.35 | 1.59 | 2–10 | 6.93 | 1.54 | 2–10 | 6.85 | 1015 |
| Number of all satellites | 11.25 | 2.26 | 5–17 | 10.17 | 1.98 | 5–14 | 13.62 | 1079 |
| Geometric dilution of precision (GDOP) | 3.00 | 1.42 | 1.6–17.3 | 3.47 | 1.98 | 1.8–16.5 | −6.81 | 875 |
| Position dilution of precision (PDOP) | 2.25 | 1.00 | 1.2–12 | 2.60 | 1.38 | 1.4–11.9 | −6.79 | 877 |
| Vertical dilution of precision (VDOP) | 1.96 | 0.88 | 1–10.9 | 2.29 | 1.24 | 1.2–11.3 | −7.00 | 870 |
| Horizontal dilution of precision (HDOP) | 1.07 | 0.52 | 0.6–9.1 | 1.19 | 0.65 | 0.7–6.4 | −4.95 | 907 |
| Canopy Cover | ‘Accurate’ (n = 4813) | ‘Inaccurate’ (n = 751) |
|---|---|---|
| Mean | 39.51% | 62.75% |
| Minimum | 0.54% | 23.16% |
| Maximum | 86.89% | 85.78% |
| Canopy Cover | ‘Accurate’ (n = 1306) | ‘Inaccurate’ (n = 573) |
|---|---|---|
| Mean | 51.50% | 61.69% |
| Minimum | 4.03% | 24.40% |
| Maximum | 100.00% | 95.20% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lopatin, E.; Väätäinen, K.; Kukko, A.; Kaartinen, H.; Hyyppä, J.; Holmström, E.; Sikanen, L.; Nuutinen, Y.; Routa, J. Unlocking Digitalization in Forest Operations with Viewshed Analysis to Improve GNSS Positioning Accuracy. Forests 2023, 14, 689. https://doi.org/10.3390/f14040689
Lopatin E, Väätäinen K, Kukko A, Kaartinen H, Hyyppä J, Holmström E, Sikanen L, Nuutinen Y, Routa J. Unlocking Digitalization in Forest Operations with Viewshed Analysis to Improve GNSS Positioning Accuracy. Forests. 2023; 14(4):689. https://doi.org/10.3390/f14040689
Chicago/Turabian StyleLopatin, Eugene, Kari Väätäinen, Antero Kukko, Harri Kaartinen, Juha Hyyppä, Eero Holmström, Lauri Sikanen, Yrjö Nuutinen, and Johanna Routa. 2023. "Unlocking Digitalization in Forest Operations with Viewshed Analysis to Improve GNSS Positioning Accuracy" Forests 14, no. 4: 689. https://doi.org/10.3390/f14040689