

Novel Recursive BiFPN Combining with Swin Transformer for Wildland Fire Smoke Detection



Abstract
:1. Introduction
2. Datasets
3. Methods
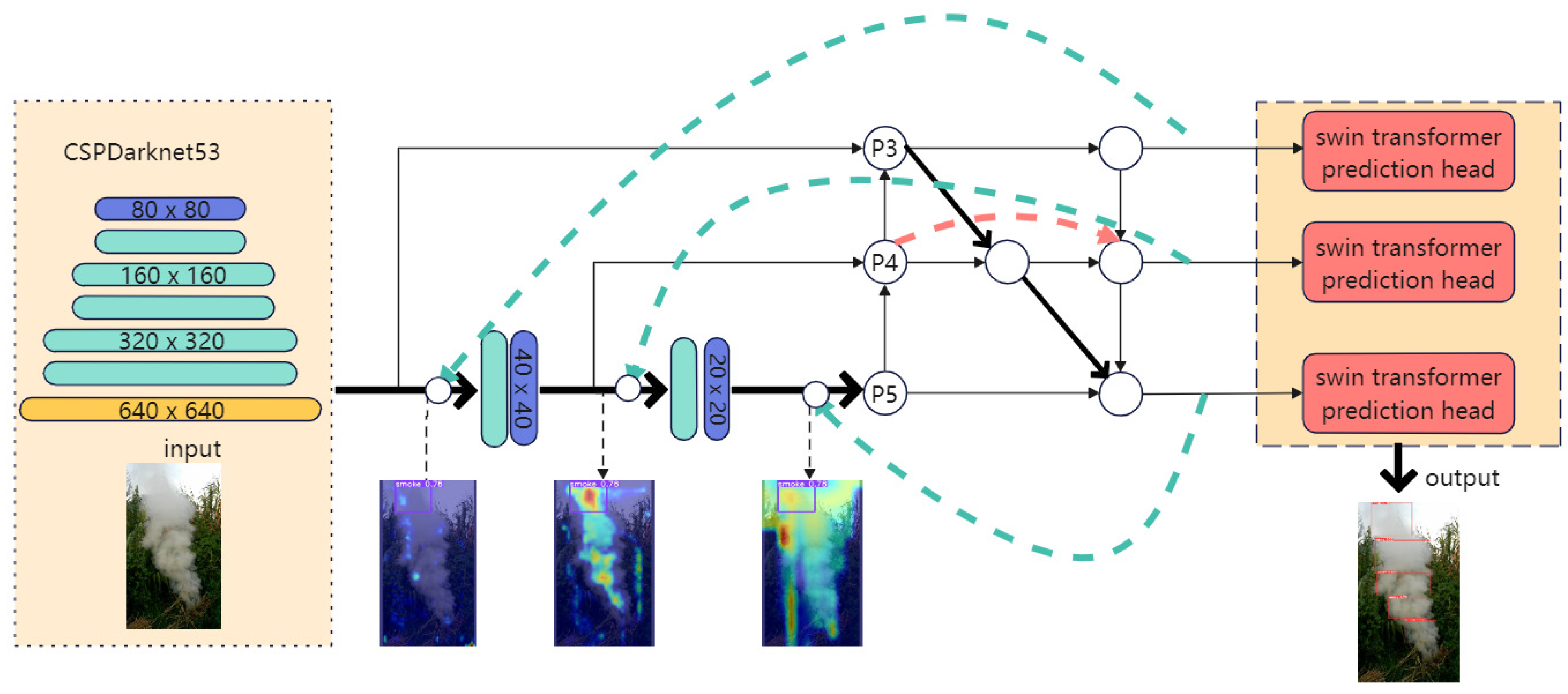
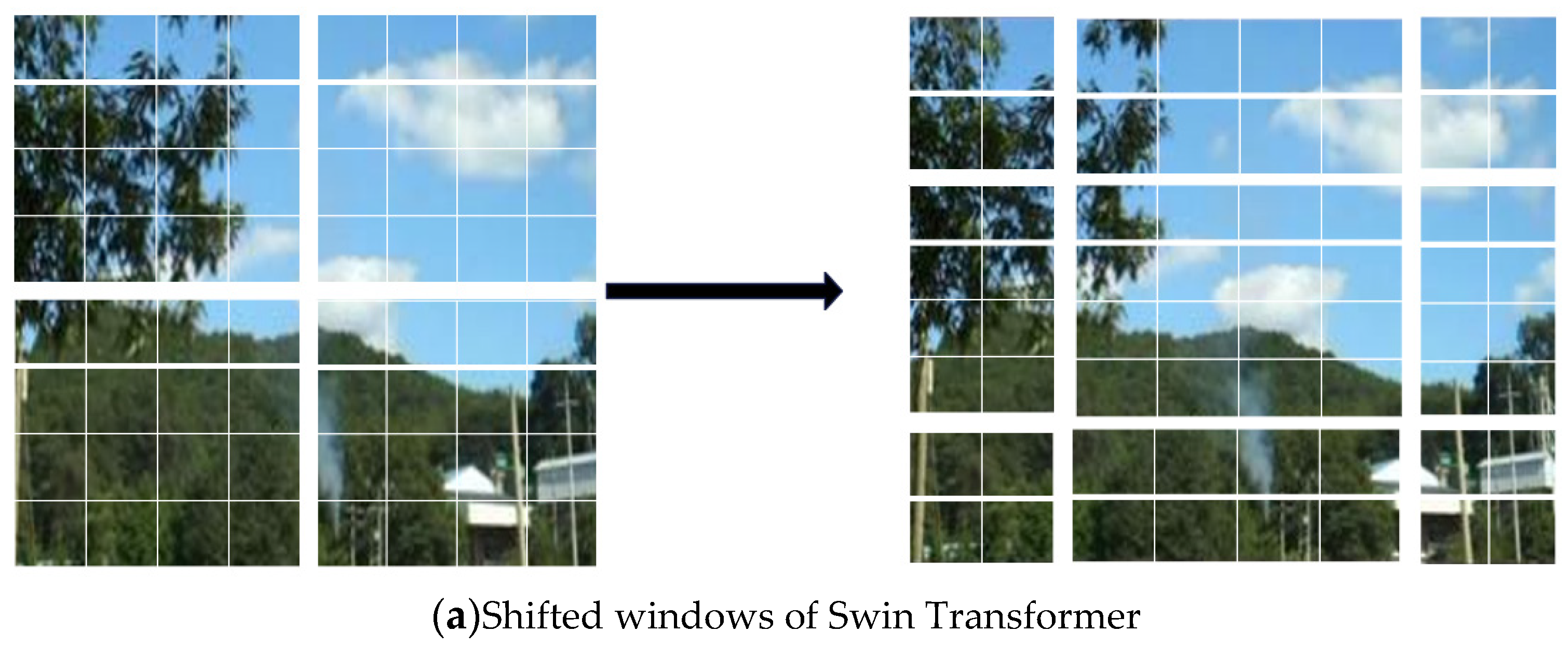
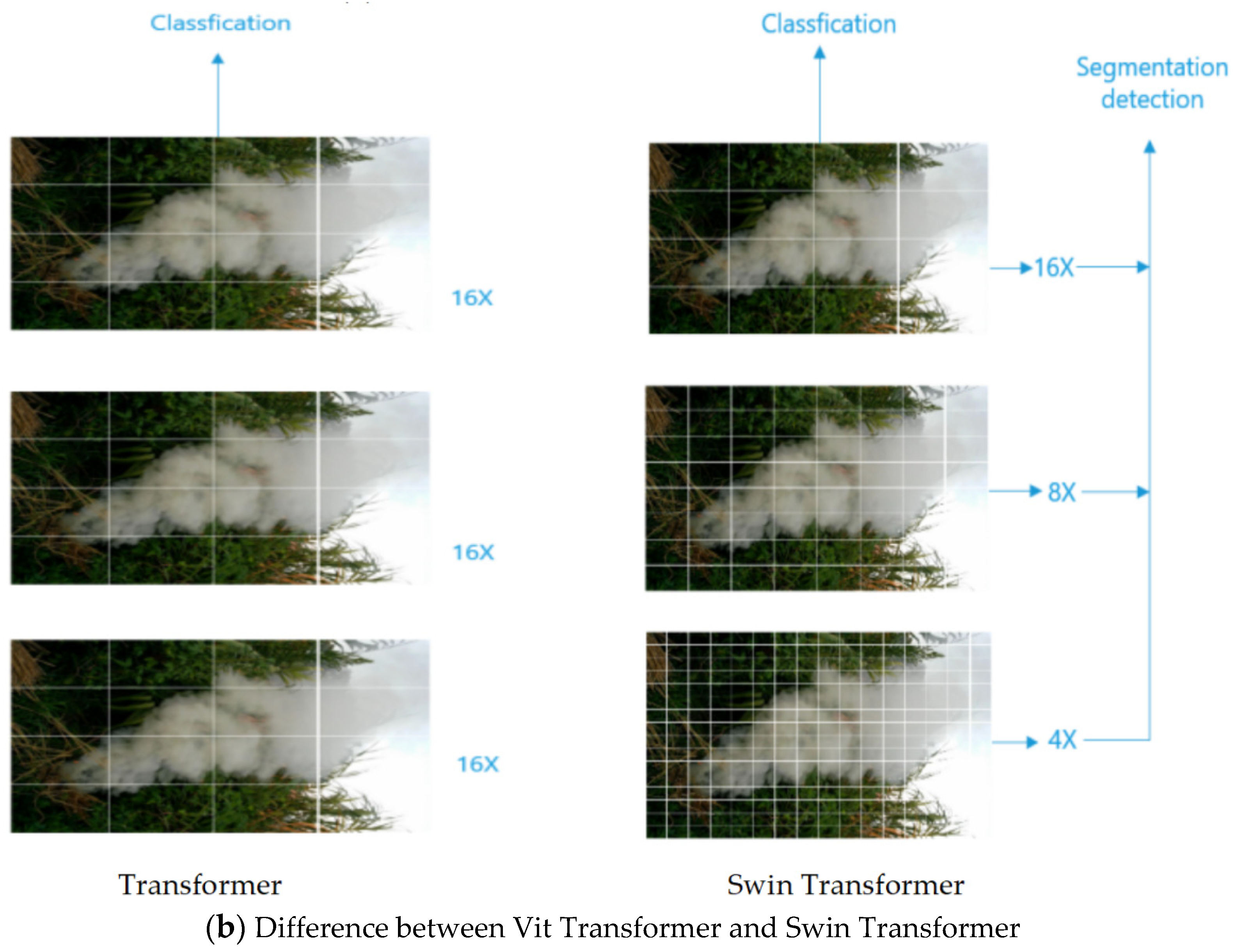
3.1. The Architecture of Wildfire Smoke Detection Network
3.2. Workflow of Network Structure
4. Experiments
4.1. Experimental Configuration
4.2. Evaluation of Feature Extraction
4.3. Anti-Interference
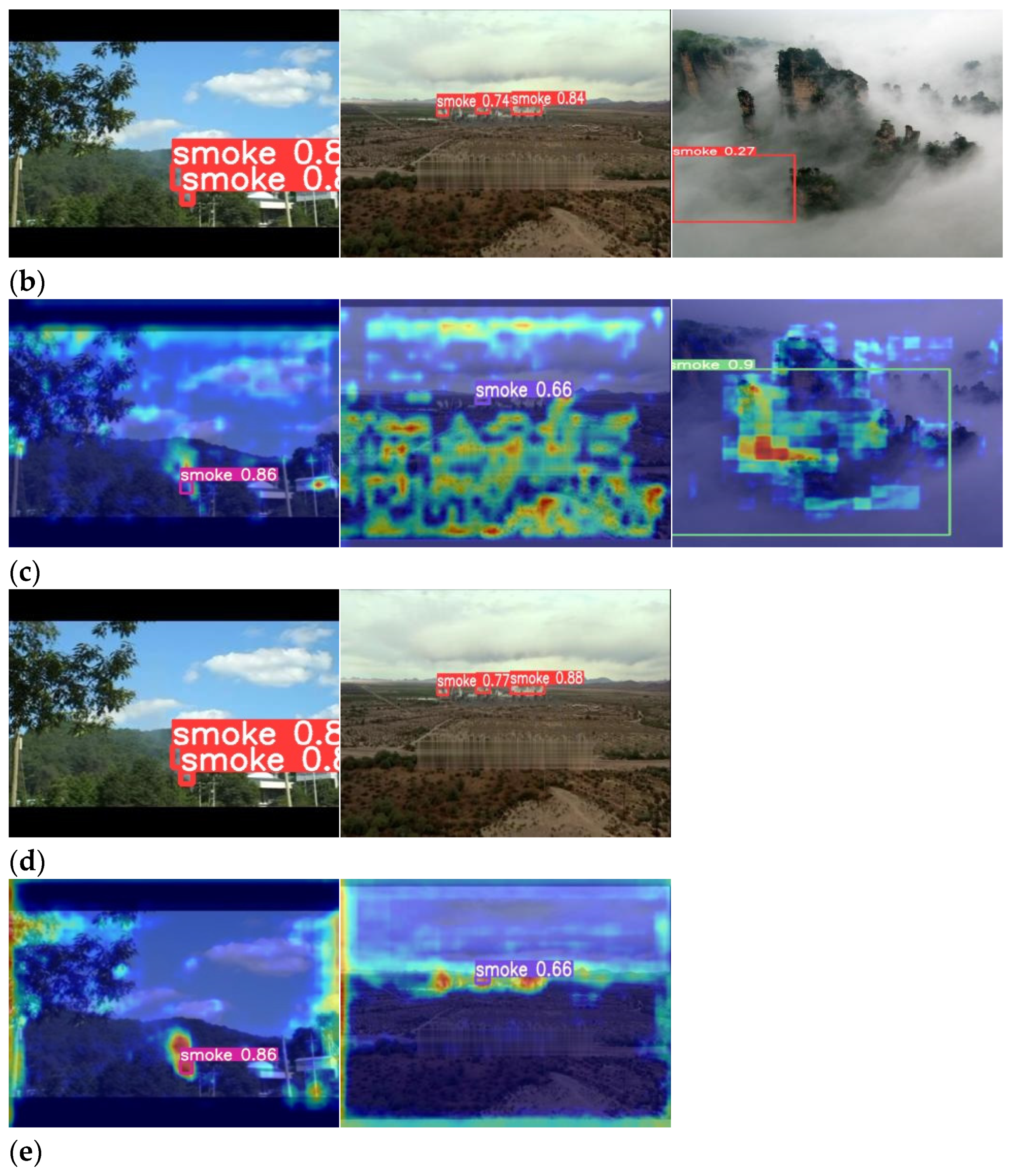
4.4. Identification of the Challenging Smoke Images
4.5. Comparison of the Model
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Guo, Y.; Chen, G.; Wang, Y.-N.; Zha, X.-M.; Xu, Z. Wildfire Identification Based on an Improved Two-Channel Convolutional Neural Network. Forests 2022, 13, 1302. [Google Scholar] [CrossRef]
- Zhang, J.; Li, W.; Han, N.; Kan, J. Forest fire detection system based on a zigbee wireless sensor network. Front. For. China 2008, 3, 369–374. [Google Scholar] [CrossRef]
- Aslan, Y.E.; Korpeoglu, I.; Ulusoy, Ö. A framework for use of wireless sensor networks in forest fire detection and monitoring. Comput. Environ. Urban Syst. 2012, 36, 614–625. [Google Scholar] [CrossRef]
- Dener, M.; Özkök, Y.; Bostancıolu, C. Fire detection systems in wireless sensor networks. Procedia-Soc. Behav. Sci. 2015, 195, 1846–1850. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Wu, L.; Li, T.; Shi, P. A Smoke Detection Model Based on Improved YOLOv5. Mathematics 2022, 10, 1190. [Google Scholar] [CrossRef]
- Jiang, H.; Yuan, W.; Ru, Y.; Chen, Q.; Wang, J.; Zhou, H. Feasibility of identifying the authenticity of fresh and cooked mutton kebabs using visible and near-infrared hyperspectral imaging. Spectrochim. Acta Part A Mol. Biomol. Spectrosc. 2022, 282, 121689. [Google Scholar] [CrossRef]
- Shi, F.; Wang, J.; Shi, J.; Wu, Z.; Wang, Q.; Tang, Z.; He, K.; Shi, Y.; Shen, D. Review of Artificial Intelligence Techniques in Imaging Data Acquisition, Segmentation, and Diagnosis for COVID-19. IEEE Rev. Biomed. Eng. 2021, 14, 4–15. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Z.; Wei, H.; Hu, G.; Li, Y.; Qi, G.; Mazur, N. A Novel Fast Single Image Dehazing Algorithm Based on Artificial Multiexposure Image Fusion. IEEE Trans. Instrum. Meas. 2021, 70, 1–23. [Google Scholar] [CrossRef]
- Wang, T.; Shi, L.; Yuan, P.; Bu, L.; Hou, X. A new fire detection method based on flame color dispersion and similarity inconsecutive frames. In Proceedings of the 2017 Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; pp. 151–156. [Google Scholar]
- Gubbi, J.; Marusic, S.; Palaniswami, M. Smoke detection in video using wavelets and support vector machines. Fire Saf. J. 2009, 44, 1110–1115. [Google Scholar] [CrossRef]
- Gunay, O.; Toreyin, B.U.; Kose, K.; Cetin, A.E. Entropy-functional-based online adaptive decision fusion framework with application to wildfire detection in video. IEEE Trans. Image Process. 2012, 21, 2853–2865. [Google Scholar] [CrossRef]
- Jia, Y.; Chen, W.; Yang, M.; Wang, L.; Liu, D.; Zhang, Q. Video smoke detection with domain knowledge and transfer learning from deep convolutional neural networks. OPTIK 2021, 240, 166947. [Google Scholar] [CrossRef]
- He, L.; Gong, X.; Zhang, S.; Wang, L.; Li, F. Efficient attention based deep fusion CNN for smoke detection in fog environment. Neurocomputing 2021, 434, 224–238. [Google Scholar] [CrossRef]
- Pan, J.; Ou, X.; Xu, L. A Collaborative Region Detection and Grading Framework for Forest Fire Smoke Using Weakly Supervised Fine Segmentation and Lightweight Faster-RCNN. Forests 2021, 12, 768. [Google Scholar] [CrossRef]
- Zhao, E.; Liu, Y.; Zhang, J.; Tian, Y. Forest Fire Smoke Recognition Based on Anchor Box Adaptive Generation Method. Electronics 2021, 10, 566. [Google Scholar] [CrossRef]
- Li, F.S.; Yao, D.F.; Jiang, M.H.; Kang, X.C. Smoking behavior recognition based on a two-level attention fine-grained model and EfficientDet network. J. Intell. Fuzzy Syst. 2022, 43, 5733–5747. [Google Scholar] [CrossRef]
- Wu, S.X.; Zhang, L.B. Using Popular Object Detection Methods for Real Time Forest Fire Detection. In Proceedings of the 11th International Symposium on Computational Intelligence and Design (ISCID), Hangzhou, China, 8–9 December 2018; pp. 280–284. [Google Scholar]
- Luo, Y.; Zhao, L.; Liu, P.; Huang, D. Fire smoke detection algorithm based on motion characteristic and convolutional neural networks. Multimed. Tools Appl. 2018, 77, 15075–15092. [Google Scholar] [CrossRef]
- Li, X.; Xu, Z.H.; Shen, X.; Zhou, Y.; Xiao, B.; Li, T.Q. Detection of Cervical Cancer Cells in Whole Slide Images Using Deformable and Global Context Aware Faster RCNN-FPN. Curr. Oncol. 2021, 28, 3585–3601. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Zell, A. Yolo+FPN: 2D and 3D Fused Object Detection with an RGB-D Camera. In Proceedings of the 2020 25th International Conference on Pattern Recognition (ICPR), Milan, Italy, 10–15 January 2020; pp. 4657–4664. [Google Scholar]
- Yu, Y.; Zhang, K.; Yang, L.; Zhang, D. Fruit detection for strawberry harvesting robot in non-structural environment based on Mask-RCNN. Comput. Electron. Agric. 2019, 163, 104846. [Google Scholar] [CrossRef]
- Yu, J.M.; Zhang, W. Face Mask Wearing Detection Algorithm Based on Improved YOLO-v4. Sensors 2021, 21, 3263. [Google Scholar] [CrossRef]
- Ghiasi, G.; Lin, T.Y.; Le, Q.V. NAS-FPN: Learning Scalable Feature Pyramid Architecture for Object Detection. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 7029–7038. [Google Scholar]
- Wang, Y.F.; Hua, C.C.; Ding, W.L.; Wu, R. Real-time detection of flame and smoke using an improved YOLOv4 network. Signal Image Video Process. 2022, 16, 1109–1116. [Google Scholar] [CrossRef]
- Qiao, S.Y.; Chen, L.C.; Yuile, A. DetectoRS: Detecting Objects with Recursive Feature Pyramid and Switchable Atrous Convolution. In Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 20–25 June 2022; pp. 10208–10219. [Google Scholar]
- Zhu, X.; Lyu, S.; Wang, X.; Zhao, Q. TPH-YOLOv5: Improved YOLOv5 Based on Transformer Prediction Head for Object Detection on Drone-captured Scenarios. In Proceedings of the 2021 IEEE International Conference on Computer Vision (ICCV), Montreal, QC, Canada, 11–17 October 2021. [Google Scholar]
- Liu, Z.; Lin, Y.; Cao, Y.; Hu, H.; Wei, Y.; Zhang, Z.; Lin, S.; Guo, B. Swin Transformer: Hierarchical Vision Transformer using Shifted Windows. In Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision (ICCV 2021), Montreal, QC, Canada, 11–17 October 2021; pp. 9992–10002. [Google Scholar]
- Li, Z.; Zou, H.; Sun, X.; Zhu, T.; Ni, C. 3d expression-invariant face verification based on transfer learning and siamese network for small sample size. Electronics 2021, 10, 2128. [Google Scholar] [CrossRef]
- Fukui, H.; Hirakawa, T.; Yamashita, T.; Fujiyoshi, H. Attention branch network: Learning of attention mechanism for visual explanation. arXiv 2021, arXiv:1812.10025. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention is all you need. Adv. Neural Inf. Process. Syst. 2017, 5998–6008. [Google Scholar]
- He, H.; Liu, J.; Pan, Z.; Cai, J.; Zhang, J.; Tao, D.; Zhuang, B. Pruning Self-attentions into Convolutional Layers in Single Path. arXiv 2021, arXiv:2111.11802. [Google Scholar]
- Zhu, M.; Han, K.; Tang, Y.; Wang, Y. Visual Transformer Pruning. arXiv 2021, arXiv:2104.08500. [Google Scholar]
- Mehta, S.; Rastegari, M. MobileViT: Light-weight, General-purpose, and Mobile-friendly Vision Transformer. arXiv 2021, arXiv:2110.02178. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Datasets | Fire Smoke Image | Interference Images |
|---|---|---|
| Total number | 700 | 300 |
| Training | 630 | 270 |
| Testing | 70 | 30 |
| Models | Precision | Map |
|---|---|---|
| BiFPN + GIOU_Loss | 0.764 | 0.728 |
| RBiFPN + GIOU_Loss | 0.765 | 0.736 |
| BiFPN + TPH | 0.774 | 0.765 |
| RBiFPN + TPH | 0.821 | 0.805 |
| BiFPN + Swin-TPH | 0.764 | 0.751 |
| RBiFPN + Swin-TPH | 0.858 | 0.823 |
| Models | Precision | Recall | Map |
|---|---|---|---|
| Faster RCNN | 0.378 | 0.701 | 0.584 |
| Efficientdet | 0.728 | 0.406 | 0.497 |
| SSD | 0.780 | 0.131 | 0.411 |
| BiFPN + GIOU_Loss | 0.845 | 0.631 | 0.632 |
| RBiFPN + GIOU_Loss | 0.894 | 0.636 | 0.647 |
| RBiFPN + TPH | 0.819 | 0.671 | 0.663 |
| Ours (RBiFPN + Swin-TPH) | 0.847 | 0.674 | 0.674 |
| Framework | Neckbone | Prediction Head | AP | AR | Map | FPR | Param(M) | FPS | FLOPs(G) |
|---|---|---|---|---|---|---|---|---|---|
| Faster RCNN | None | Sparse-Prediction | 0.750 | 0.817 | 0.752 | 0.387 | 28.48 | 11.5 | 939.6 |
| Efficientdet | BiFPN | Class + Box prediction net | 0.729 | 0.469 | 0.611 | - | 3.874 | 25.9 | 5.1 |
| SSD | None | None | 0.820 | 0.278 | 0.599 | - | 26.3 | 93.8 | 62.8 |
| YOLOV5 | PANet | GIOU_Loss | 0.760 | 0.781 | 0.717 | 0.203 | 46.14 | 10.6 | 107.8 |
| YOLOV5 | BiFPN | GIOU_Loss | 0.764 | 0.783 | 0.728 | 0.093 | 46.86 | 10.4 | 114.9 |
| YOLOV5 | RBiFPN | GIOU_Loss | 0.785 | 0.787 | 0.796 | 0.060 | 101.04 | 6.1 | 199.4 |
| YOLOV5 | BiFPN | TPH | 0.774 | 0.803 | 0.765 | 0.058 | 51.94 | 5.5 | 111.3 |
| YOLOV5 | RBiFPN | TPH | 0.821 | 0.812 | 0.805 | 0.054 | 106.56 | 4.0 | 202.9 |
| Ours | RBiFPN | Swin-TPH | 0.858 | 0.826 | 0.823 | 0.053 | 103.14 | 4.1 | 407.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, A.; Zhao, Y.; Zheng, Z. Novel Recursive BiFPN Combining with Swin Transformer for Wildland Fire Smoke Detection. Forests 2022, 13, 2032. https://doi.org/10.3390/f13122032
Li A, Zhao Y, Zheng Z. Novel Recursive BiFPN Combining with Swin Transformer for Wildland Fire Smoke Detection. Forests. 2022; 13(12):2032. https://doi.org/10.3390/f13122032
Chicago/Turabian StyleLi, Ao, Yaqin Zhao, and Zhaoxiang Zheng. 2022. "Novel Recursive BiFPN Combining with Swin Transformer for Wildland Fire Smoke Detection" Forests 13, no. 12: 2032. https://doi.org/10.3390/f13122032