
Tree Information Modeling: A Data Exchange Platform for Tree Design and Management


Abstract
:1. Introduction
1.1. Aim of This Study
1.1.1. History and Trend of Tree Use Integrated in Human Habitats
1.1.2. Conflicts between Gray and Green Infrastructure
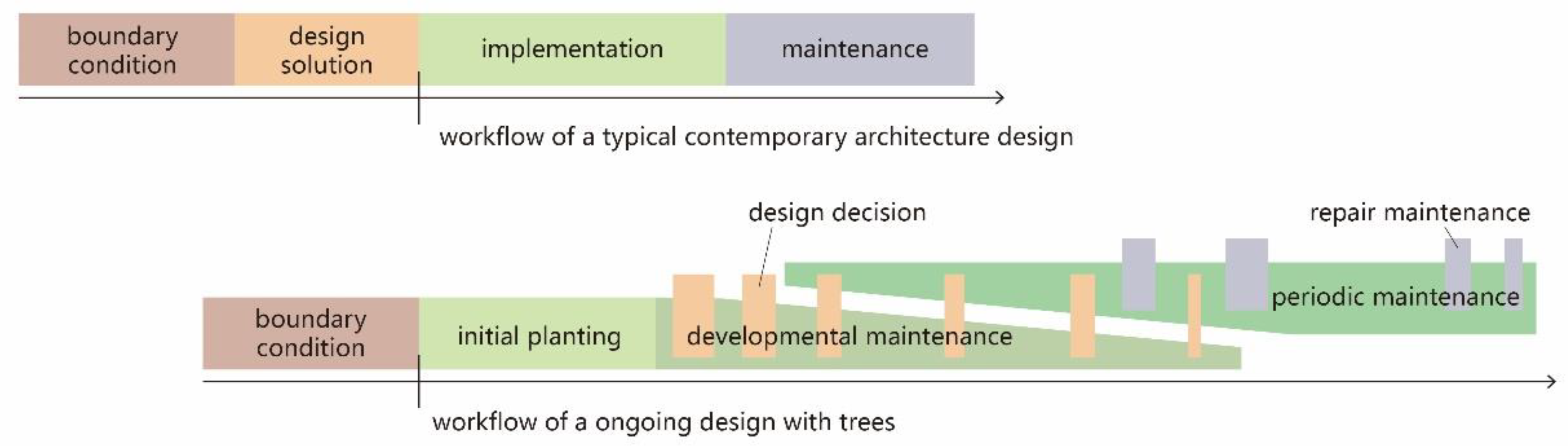
1.1.3. A Novel Workflow for Tree Design and Management
1.1.4. This Solution Requires Interdisciplinary Cooperations
1.1.5. A Starting Point for the Proposed Workflow
1.2. Related Studies in Interdisciplinary Fields
1.2.1. Tree Management and Risk Assessment in Arboriculture
1.2.2. Urban Tree Models and Databases from Forestry Science
1.2.3. Functional Structural Plant Models in Varies Scales
1.2.4. Quantitative Structure Models (QSMs) of Trees
1.2.5. Digital Tools and Databases of Trees Used in the Building Industry
2. Tree Information Modeling
2.1. Definition
2.2. Methods for Data Acquisition and Processing
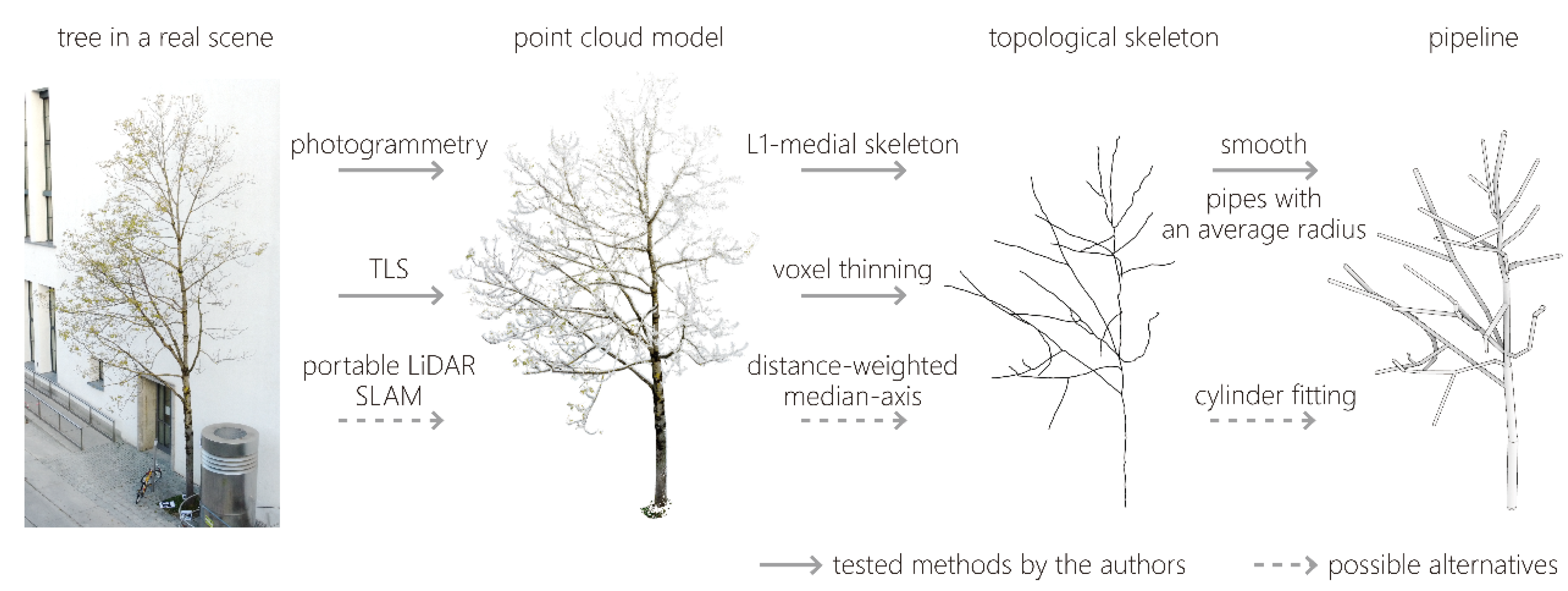
2.2.1. From Reality to TIM—Data Acquisition through Multiple Tools
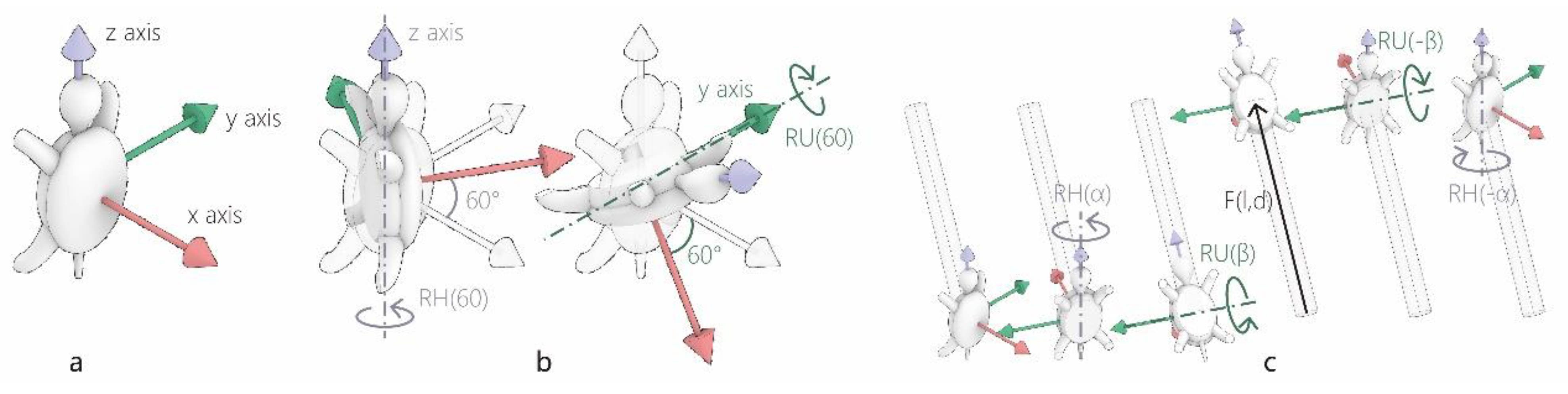
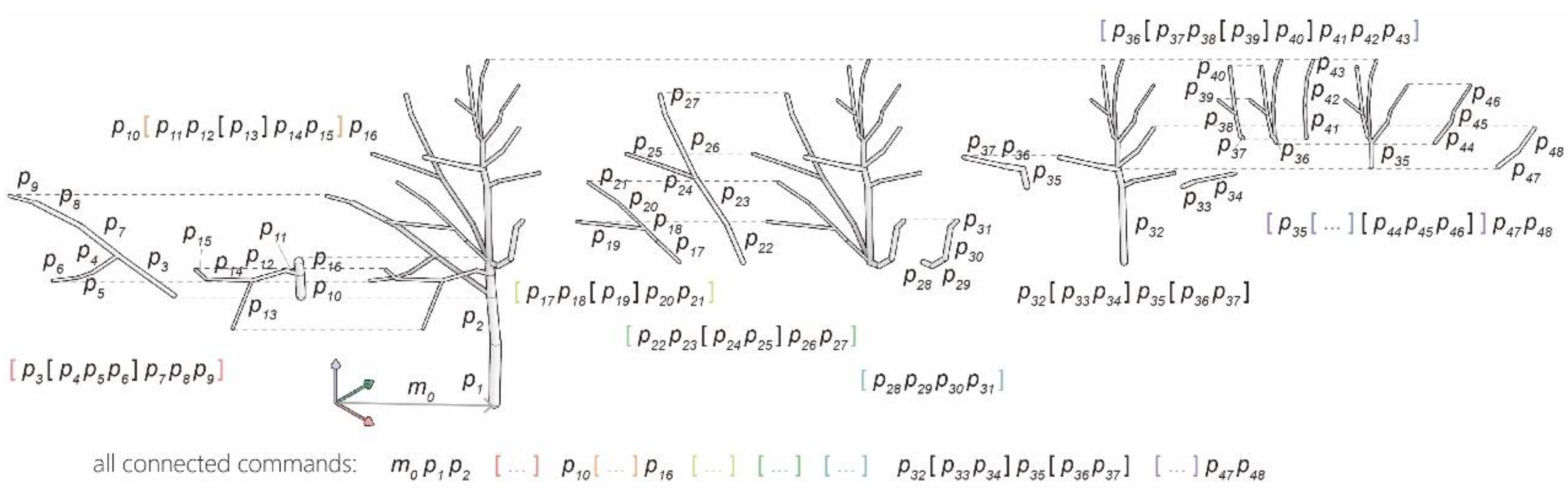
2.2.2. From TIM to Established Applications—Interpreting Pipelines into L-System as an Example
3. A Vision of TIM
3.1. Development in Data Acquisition and Application
3.2. Merging the Bottom-Up Simulation with the Global Status of the Tree
3.3. Design Workflow Assisted by TIM
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Abbreviations | Full Term |
| BIM | Building Information Modeling |
| CAD | Computer Aided Design |
| CIM | City Information modeling |
| DBH | Diameter at Breast Height |
| ESS/ES | Ecosystem Services |
| FSPM | Functional Structural Plant Model |
| GIS | Geographic Information System |
| IoT | Internet of Things |
| LAD | Leaf Area Density |
| LAI | Leaf Area Index |
| LiDAR | Light Detection And Ranging |
| LIM | Landscape Information Modelling |
| LoD | Level of Detail |
| QSM | Quantitative Structure Models |
| SfM | Structure from Motion |
| SLAM | Simultaneous Localization and Mapping |
| TDS | Tree Description System |
| TIM | Tree Information Modeling |
| TLS | Terrestrial Laser Scanning |
| UHI | Urban Heat Islands |
References
- Schroeder, H.W. Does beauty still matter? Experiential and utilitarian values of urban trees. In Trees, People and the Built Environment, Proceedings of the Urban Trees Research Conference, Birmingham, UK, 13–14 April 2011; Institute of Chartered Foresters: Edinburgh, UK, 2011; pp. 159–165. [Google Scholar]
- Hong, X.-C.; Wang, G.-Y.; Liu, J.; Dang, E. Perceived Loudness Sensitivity Influenced by Brightness in Urban Forests: A Comparison When Eyes Were Opened and Closed. Forests 2020, 11, 1242. [Google Scholar] [CrossRef]
- Irmak, M.A.; Yilmaz, S.; Mutlu, E.; Yilmaz, H. Assessment of the effects of different tree species on urban microclimate. Environ. Sci. Pollut. Res. 2018, 25, 15802–15822. [Google Scholar] [CrossRef] [PubMed]
- Rahman, M.A.; Franceschi, E.; Pattnaik, N.; Moser-Reischl, A.; Hartmann, C.; Paeth, H.; Pretzsch, H.; Rötzer, T.; Pauleit, S. Spatial and temporal changes of outdoor thermal stress: Influence of urban land cover types. Sci. Rep. 2022, 12, 1–13. [Google Scholar] [CrossRef]
- Lazar, N.; Chithra, K. A comprehensive literature review on development of Building Sustainability Assessment Systems. J. Build. Eng. 2020, 32, 101450. [Google Scholar] [CrossRef]
- Edmunds, A. Espalier Fruit Trees: Their History and Culture; Pomona Books: Hebden Bridge, West Yorkshire, UK, 1986. [Google Scholar]
- Nicholson, J. Results of coppicing, pollarding and pruning experiments to stimulate Strychnos nux-vomica fruit production. Indian For. 1937, 63, 588–597. [Google Scholar]
- Wilson, P.J. Botanical diversity in the hedges and field margins of lowland Britain. In The Ecology of Hedgerows and Field Margin; Routledge: London, UK, 2019; p. 3554. [Google Scholar]
- Höpfl, L.; Hensel, D.S.; Hensel, M.; Ludwig, F. Initiating research into adapting rural hedging techniques, hedge types, and hedgerow networks as novel urban green systems. Land 2021, 10, 529. [Google Scholar] [CrossRef]
- Torquati, B.; Giacchè, G.; Venanzi, S. Economic analysis of the traditional cultural vineyard landscapes in Italy. J. Rural. Stud. 2015, 39, 122–132. [Google Scholar] [CrossRef]
- Beckmann, R. Die Hausschutzhecken im Monschauer Land Unter Besonderer Berücksichtigung Ihrer klimatischen Auswirkungen; Dümmler Verlag: Bonn, Germany, 1982. [Google Scholar]
- Kabir, E.; Guikema, S.; Kane, B. Statistical modeling of tree failures during storms. Reliab. Eng. Syst. Saf. 2018, 177, 68–79. [Google Scholar] [CrossRef]
- Roy, S.; Byrne, J.; Pickering, C. A systematic quantitative review of urban tree benefits, costs, and assessment methods across cities in different climatic zones. Urban For. Urban Green. 2012, 11, 351–363. [Google Scholar] [CrossRef] [Green Version]
- Rötzer, T.; Moser-Reischl, A.; Rahman, M.A.; Grote, R.; Pauleit, S.; Pretzsch, H. Modelling urban tree growth and ecosystem services: Review and perspectives. Prog. Bot. 2020, 82, 405–464. [Google Scholar]
- MVRDV. Salón Verde. 2021. Available online: https://www.mvrdv.nl/projects/453/salon-verde (accessed on 29 June 2022).
- Sandigliano, T. Street Tree Pods—WeVux. 2019. Available online: https://wevux.com/street-tree-pods0055922/#:~:text=As%20part%20of%20his%20MA,the%20city's%20high%20pollution%20levels (accessed on 29 June 2022).
- Belcher, R.N.; Fornasari, L.; Menz, S.; Schroepfer, T. Birds use of vegetated and non-vegetated high-density buildings—A case study of Milan. J. Urban Ecol. 2018, 4, juy001. [Google Scholar] [CrossRef] [Green Version]
- IngenhovenArchitects. Ingenhoven Architects—Kö-Bogen II Düsseldorf. 2020. Available online: https://www.ingenhovenarchitects.com/projekte/weitere-projekte/koe-bogen-ii-duesseldorf/description (accessed on 29 June 2022).
- Ludwig, F.; Schwertfreger, H.; Storz, O. Living systems: Designing growth in Baubotanik. Archit. Des. 2012, 82, 82–87. [Google Scholar] [CrossRef]
- Leuzinger, S.; Vogt, R.; Körner, C. Tree surface temperature in an urban environment. Agric. For. Meteorol. 2010, 150, 56–62. [Google Scholar] [CrossRef]
- Moser-Reischl, A.; Rötzer, T.; Pauleit, S.; Pretzsch, H. Urban Tree Growth Characteristics of Four Common Species in South Germany. Arboric. Urban For. 2021, 47, 150–169. [Google Scholar] [CrossRef]
- Franceschi, E.; Moser-Reischl, A.; Rahman, M.A.; Pauleit, S.; Pretzsch, H.; Rötzer, T. Crown Shapes of Urban Trees-Their Dependences on Tree Species, Tree Age and Local Environment, and Effects on Ecosystem Services. Forests 2022, 13, 748. [Google Scholar] [CrossRef]
- Sun, G.; Webster, C.; Zhang, X. Connecting the city: A three-dimensional pedestrian network of Hong Kong. Environ. Plan. B Urban Anal. City Sci. 2021, 48, 60–75. [Google Scholar] [CrossRef]
- Loughran, K. Parks for profit: The high line, growth machines, and the uneven development of urban public spaces. City Community 2014, 13, 49–68. [Google Scholar] [CrossRef]
- Santiago, J.-L.; Rivas, E.; Sanchez, B.; Buccolieri, R.; Esposito, A.; Martilli, A.; Vivanco, M.G.; Martin, F. Impact of Different Combinations of Green Infrastructure Elements on Traffic-Related Pollutant Concentrations in Urban Areas. Forests 2022, 13, 1195. [Google Scholar] [CrossRef]
- Vos, P.E.; Maiheu, B.; Vankerkom, J.; Janssen, S. Improving local air quality in cities: To tree or not to tree? Environ. Pollut. 2013, 183, 113–122. [Google Scholar] [CrossRef]
- Roman, L.A.; Scatena, F.N. Street tree survival rates: Meta-analysis of previous studies and application to a field survey in Philadelphia, PA, USA. Urban For. Urban Green. 2011, 10, 269–274. [Google Scholar] [CrossRef]
- Browell, M.F. Tree Risk Assessment. Arboric. J. 1996, 20, 3–12. [Google Scholar] [CrossRef]
- Aktas, C.B.; Bilec, M.M. Impact of lifetime on US residential building LCA results. Int. J. Life Cycle Assess. 2012, 17, 337–349. [Google Scholar] [CrossRef]
- Marsh, R. Building lifespan: Effect on the environmental impact of building components in a Danish perspective. Archit. Eng. Des. Manag. 2017, 13, 80–100. [Google Scholar] [CrossRef]
- Tucker, D.P.H.; Wheaton, T.A.; Muraro, R. Citrus Tree Pruning Principles and Practices. In 1994: University of Florida Cooperative Extension Service; Institute of Food and Agricultural Sciences: Gainesville, FL, USA, 1994. [Google Scholar]
- Yang, X.; Gan, T.; Zheng, H.; Cai, Q.; Chen, Y. Design of Control System for a new Intelligent Tree-climbing and Pruning Robot. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2022. [Google Scholar]
- Nawari, N.O. BIM standard in off-site construction. J. Archit. Eng. 2012, 18, 107–113. [Google Scholar] [CrossRef]
- Bottaccioli, L.; Aliberti, A.; Ugliotti, F.; Patti, E.; Osello, A.; Macii, E.; Acquaviva, A. Building energy modelling and monitoring by integration of IoT devices and building information models. In Proceedings of the 2017 IEEE 41st Annual Computer Software and Applications Conference (COMPSAC), Turin, Italy, 4–8 July 2017. [Google Scholar]
- Tang, S.; Shelden, D.R.; Eastman, C.M.; Pishdad-Bozorgi, P.; Gao, X. A review of building information modeling (BIM) and the internet of things (IoT) devices integration: Present status and future trends. Autom. Constr. 2019, 101, 127–139. [Google Scholar] [CrossRef]
- Souza, L.; Bueno, C. City Information Modelling as a support decision tool for planning and management of cities: A systematic literature review and bibliometric analysis. Build. Environ. 2022, 207, 108403. [Google Scholar] [CrossRef]
- München, L. Digitaler Zwilling München. 2019. Available online: https://muenchen.digital/twin/ (accessed on 29 June 2022).
- Veglianti, E.; Magnaghi, E.; De Marco, M.; Li, Y. Smart city in China: The state of art of Xiong an new area. In Organizing Smart Buildings and Cities; Springer: Cham, Switzerland, 2021; pp. 81–97. [Google Scholar]
- Ahmad, A.M.; Aliyu, A.A. The need for landscape information modelling (LIM) in landscape architecture. In Proceedings of the 13th Digital Landscape Architecture Conference, Weimar, Germany, 31 May–2 June 2012. [Google Scholar]
- Bedker, P.J. How to Prune Trees; US Department of Agriculture, Forest Service, Northeastern Area, State & Private Forestry: Radnor, PA, USA, 1995; Volume 1. [Google Scholar]
- ATTC. ATTC-Tree Care: Additional Technical Terms of Contract and Guidelines for Tree Care; Dujesiefken, D., Ed.; Forschungsgesellschaft Landschaftsentwicklung Landschaftsbau e. V. (FLL): Bonn, Germany, 2017; p. 88. [Google Scholar]
- Lilly, S.J.; Gilman, E.F.; Smiley, T.E. Best Management Practices—Pruning, 3rd ed.; International Society of Arboriculture: Atlanta, United States, 2019. [Google Scholar]
- Clark, J.R.; Matheny, N. The research foundation to tree pruning: A review of the literature. Arboric. Urban For. 2010, 36, 110–120. [Google Scholar] [CrossRef]
- Purcell, L. Tree Pruning: What Do Trees Think? In Forestry and Natureal Resources; Purdue Extension: West Lafayette, IN, USA, 2017. [Google Scholar]
- Gilman, E.F.; Kempf, B.; Matheny, N.; Clark, J. Structural Pruning: A Guide for the Green Industry; Urban Tree Foundation: Visalia, CA, USA, 2013. [Google Scholar]
- Pokorny, J.D. Urban Tree Risk Management: A Community Guide to Program Design and Implementation; USDA Forest Service, Northeastern Area, State and Private Forestry: Newtown, PA, USA, 2003; Volume 3. [Google Scholar]
- Detter, A.; Rust, S. Aktuelle Untersuchungsergebnisse zu Zugversuchen. Jahrbuch der Baumpflege; Haymarket Media: Braunschweig, Germany, 2013; pp. 87–100. [Google Scholar]
- Peltola, H.M. Mechanical stability of trees under static loads. Am. J. Bot. 2006, 93, 1501–1511. [Google Scholar] [CrossRef]
- Rust, S.; van Wassenaer, P. Tools for tree risk assessment. In Routledge Handbook of Urban Forestry; Routledge: London, UK, 2017; pp. 489–499. [Google Scholar]
- Abbas, S.; Kwok, C.Y.T.; Hui, K.K.W.; Li, H.; Chin, D.C.; Ju, S.; Heo, J.; Wong, M.S. Tree tilt monitoring in rural and urban landscapes of Hong Kong using smart sensing technology. Trees For. People 2020, 2, 100030. [Google Scholar] [CrossRef]
- Yang, Z.; Hui, K.; Abbas, S.; Zhu, R.; Kwok, C.; Heo, J.; Ju, S.; Wong, M. A review of dynamic tree behaviors: Measurement methods on tree sway, tree tilt, and root–plate movement. Forests 2021, 12, 379. [Google Scholar] [CrossRef]
- Blodgett, G. Frederick law olmsted: Landscape architecture as conservative reform. J. Am. Hist. 1976, 62, 869–889. [Google Scholar] [CrossRef]
- Konijnendijk, C.C. A decade of urban forestry in Europe. For. Policy Econ. 2003, 5, 173–186. [Google Scholar] [CrossRef]
- Konijnendijk, C.C.; Ricard, R.M.; Kenney, A.; Randrup, T.B. Defining urban forestry—A comparative perspective of North America and Europe. Urban For. Urban Green. 2006, 4, 93–103. [Google Scholar] [CrossRef] [Green Version]
- Miller, R.W.; Hauer, R.J.; Werner, L.P. Urban Forestry: Planning and Managing Urban Greenspaces; Waveland Press: Long Grove, IL, USA, 2015. [Google Scholar]
- Ball, R.; Bussey, S.C.; Patch, D.; Simson, A.; West, S. Country Report on the United Kindom. In COST Action E12 Research and Development in Urban Forestry in Europe; Forrest, M., Konijnendijk, C., Randrup, T., Eds.; Office for Official Publications of the European Communities: Luxembourg, 1999; pp. 325–340. [Google Scholar]
- Konijnendijk, C.C.; Annerstedt, M.; Nielsen, A.B.; Maruthaveeran, S. Benefits of Urban Parks. A systematic Review; A Report for IFPRA; International Federation for Parks and Recreation Administration, IFPRA: Copenhagen, Denmark; International Federation for Parks and Recreation Administration, IFPRA: Alnarp, Sweden, 2013. [Google Scholar]
- Monk, C.D.; Child, G.I.; Nicholson, S.A. Biomass, litter and leaf surface area estimates of an oak-hickory forest. Oikos 1970, 21, 138–141. [Google Scholar] [CrossRef]
- Gülçin, D.; van den Bosch, C.C.K. Assessment of above-ground carbon storage by urban trees using LiDAR data: The case of a university campus. Forests 2021, 12, 62. [Google Scholar] [CrossRef]
- McPherson, E.G.; Peper, P.J. Urban tree growth modeling. J. Arboric. Urban For. 2012, 38, 175–183. [Google Scholar] [CrossRef]
- Dahlhausen, J.; Rötzer, T.; Biber, P.; Uhl, E.; Pretzsch, H. Urban climate modifies tree growth in Berlin. Int. J. Biometeorol. 2018, 62, 795–808. [Google Scholar] [CrossRef]
- McPherson, E.G.; van Doorn, N.S.; Peper, P.J. Urban Tree Database and Allometric Equations; Gen. Tech. Rep. PSW-GTR-253; US Department of Agriculture, Forest Service, Pacific Southwest Research Station: Albany, CA, USA, 2016; 86p. [Google Scholar]
- Escobedo, F.J.; Kroeger, T.; Wagner, J.E. Urban forests and pollution mitigation: Analyzing ecosystem services and disservices. Environ. Pollut. 2011, 159, 2078–2087. [Google Scholar] [CrossRef]
- Nowak, D.J. Understanding i-Tree: Summary of Programs and Methods; General Technical Report NRS-200; US Department of Agriculture, Forest Service, Northern Research Station: Madison, WI, USA, 2020; 100p. [Google Scholar]
- Rötzer, T.; Rahman, M.; Moser-Reischl, A.; Pauleit, S.; Pretzsch, H. Process based simulation of tree growth and ecosystem services of urban trees under present and future climate conditions. Sci. Total Environ. 2019, 676, 651–664. [Google Scholar] [CrossRef]
- Vogt, J.; Gillner, S.; Hofmann, M.; Tharang, A.; Dettmann, S.; Gerstenberg, T.; Schmidt, C.; Gebauer, H.; Van de Riet, K.; Berger, U.; et al. Citree: A database supporting tree selection for urban areas in temperate climate. Landsc. Urban Plan. 2017, 157, 14–25. [Google Scholar] [CrossRef]
- Thurner, S.; Hanel, R.; Klimek, P. Introduction to the Theory of Complex Systems; Oxford University Press: Oxford, UK, 2018. [Google Scholar]
- Smith, A.M.; Stitt, M. Coordination of carbon supply and plant growth. Plant Cell Environ. 2007, 30, 1126–1149. [Google Scholar] [CrossRef] [PubMed]
- Lastdrager, J.; Hanson, J.; Smeekens, S. Sugar signals and the control of plant growth and development. J. Exp. Bot. 2014, 65, 799–807. [Google Scholar] [CrossRef] [PubMed]
- Kang, M.; Cournède, P.; de Reffye, P.; Auclair, D.; Hu, B. Analytical study of a stochastic plant growth model: Application to the GreenLab model. Math. Comput. Simul. 2008, 78, 57–75. [Google Scholar] [CrossRef]
- Wilensky, U.; Rand, W. An Introduction to Agent-Based Modeling: Modeling Natural. Social, and Engineered Complex Systems with NetLogo; MIT Press: Cambridge, MA, USA, 2015. [Google Scholar]
- Kurth, W. Morphological models of plant growth: Possibilities and ecological relevance. Ecol. Model. 1994, 75, 299–308. [Google Scholar] [CrossRef]
- Sievänen, R.; Nikinmaa, E.; Nygren, P.; Ozier-Lafontaine, H.; Perttunen, J.; Hakula, H. Components of functional-structural tree models. Ann. For. Sci. 2000, 57, 399–412. [Google Scholar] [CrossRef] [Green Version]
- Louarn, G.; Song, Y. Two decades of functional–structural plant modelling: Now addressing fundamental questions in systems biology and predictive ecology. Ann. Bot. 2020, 126, 501–509. [Google Scholar] [CrossRef]
- Godin, C. Representing and encoding plant architecture: A review. Ann. For. Sci. 2000, 57, 413–438. [Google Scholar] [CrossRef]
- Norman, J.; Welles, J. Radiative transfer in an array of canopies 1. Agron. J. 1983, 75, 481–488. [Google Scholar] [CrossRef]
- Baker, C. The development of a theoretical model for the windthrow of plants. J. Theor. Biol. 1995, 175, 355–372. [Google Scholar] [CrossRef]
- Deleuze, C.; Houllier, F. A Transport Model for Tree Ring Width. Silva Fennica. 1997, 31, 239–250. [Google Scholar] [CrossRef]
- Sperry, J.S.; Adler, F.R.; Campbell, G.S.; Comstock, J.P. Limitation of plant water use by rhizosphere and xylem conductance: Results from a model. Plant Cell Environ. 1998, 21, 347–359. [Google Scholar] [CrossRef]
- Almeida, D.R.A.D.; Stark, S.C.; Shao, G.; Schietti, J.; Nelson, B.W.; Silva, C.A.; Gorgens, E.B.; Valbuena, R.; Papa, D.D.A.; Brancalion, P.H.S. Optimizing the remote detection of tropical rainforest structure with airborne lidar: Leaf area profile sensitivity to pulse density and spatial sampling. Remote Sens. 2019, 11, 92. [Google Scholar] [CrossRef]
- Knutzen, J.; Saito, S.; Nakajima, M. Generating climbing plants using l-systems. In Proceedings of the Korean Society of Broadcast Engineers Conference; The Korean Institute of Broadcast and Media Engineers: Daejeon, Republic of Korea, 2009; pp. 784–789. [Google Scholar]
- Prusinkiewicz, P.; Lindenmayer, A. The Algorithmic Beauty of Plants; Springer Science & Business Media: New York, NY, USA, 2012. [Google Scholar]
- Salminen, H.; Saarenmaa, H.; Perttunen, J.; Sievänen, R.; Väkevä, J.; Nikinmaa, E. Modelling trees using an object-oriented scheme. Math. Comput. Model. 1994, 20, 49–64. [Google Scholar] [CrossRef]
- Armstrong, M.A. Basic Topology; Springer Science & Business Media: New York, NY, USA, 2013. [Google Scholar]
- Jain, R.; Kasturi, R.; Schunck, B.G. Machine Vision; McGraw-Hill: New York, NY, USA, 1995; Volume 5. [Google Scholar]
- Zhou, Y.; Kaufman, A.; Toga, A.W. Three-dimensional skeleton and centerline generation based on an approximate minimum distance field. Vis. Comput. 1998, 7, 303–314. [Google Scholar] [CrossRef]
- Tănase, M.; Veltkamp, R.C. A straight skeleton approximating the medial axis. In European Symposium on Algorithms; Springer: Berlin/Heidelberg, Germany, 2004. [Google Scholar]
- Wang, K.; Li, X.; Trinder, J.C. Mathematical morphological analysis of typical cyclone eyes on ocean SAR. In Proceedings of the 2014 IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014. [Google Scholar]
- Bender, E.A.; Williamson, S.G. Lists, Decisions and Graphs; S. University of California: San Diego, CA, USA, 2010. [Google Scholar]
- Prathik, A.; Uma, K.; Anuradha, J. An Overview of application of Graph theory. Int. J. ChemTech Res. 2016, 9, 242–248. [Google Scholar]
- Pradal, C.; Godin, C. MTG as a Standard Representation of Plants in FSPMs. In Proceedings of the 9th International Conference on Functional-Structural Plant Models: FSPM2020, Online, 5–9 October 2020; Institute of Horticultural Production Systems: Hannover, Germany, 2020; pp. 86–87. [Google Scholar]
- Ahuja, R.K.; Magnanti, T.L.; Orlin, J.B. Chapter iv network flows. Handb. Oper. Res. Manag. Sci. 1989, 1, 211–369. [Google Scholar]
- Fourcaud, T.; Lac, P. Mechanical Analysis of the Form and Internal Stresses of a Growing Tree by the Finite Element Method; ASME: New York, NY, USA, 1996. [Google Scholar]
- Waldrop, M. The chips are down for Moore’s law. Nat. News Feature 2016, 530, 144–147. [Google Scholar] [CrossRef] [Green Version]
- Prusinkiewicz, P. Graphical applications of L-systems. In Proceedings of the Graphics Interface and Vision Interface '86, Vancouver, BC, Canada, 26–30 May 1986; pp. 247–253. [Google Scholar]
- Karwowski, R.; Prusinkiewicz, P. The L-system-based plant-modeling environment L-studio 4.0. In Proceedings of the 4th International Workshop on Functional-Structural Plant Models; UMR AMAP: Montpellier, France, 2004. [Google Scholar]
- Hemmerling, R.; Kniemeyer, O.; Lanwert, D.; Kurth, W.; Buck-Sorlin, G. The rule-based language XL and the modelling environment GroIMP illustrated with simulated tree competition. Funct. Plant Biol. 2008, 35, 739–750. [Google Scholar] [CrossRef]
- Fournier, C.; Pradal, C.; Louarn, G.; Combes, D.; Soulié, J.C.; Luquet, D.; Boudon, F.; Chelle, M. Building modular FSPM under OpenAlea: Concepts and applications. In 6th International Workshop on Functional-Structural Plant Models; University of California: Berkeley, CA, USA, 2010. [Google Scholar]
- Boudon, F.; Pradal, C.; Cokelaer, T.; Prusinkiewicz, P.; Godin, C. L-Py: An L-system simulation framework for modeling plant architecture development based on a dynamic language. Front. Plant Sci. 2012, 3, 76. [Google Scholar] [CrossRef] [Green Version]
- Cieslak, M.; Seleznyova, A.N.; Hanan, J. A functional-structural kiwifruit vine model. In Proceedings of the 2009 Third International Symposium on Plant Growth Modeling, Simulation, Visualization and Applications, Beijing, China, 9–13 November 2009. [Google Scholar] [CrossRef]
- Allen, M.; Prusinkiewicz, P.; DeJong, T. Using L-systems for modeling source–sink interactions, architecture and physiology of growing trees: The L-PEACH model. New Phytol. 2005, 166, 869–880. [Google Scholar] [CrossRef] [Green Version]
- Fumey, D.; Lauri, P.; Guedon, Y.; Godin, C.; Costes, E. Effects of pruning on the apple tree: From tree architecture to modeling. In Proceedings of the IX International Symposium on Integrating Canopy, Rootstock and Environmental Physiology in Orchard Systems, Geneva, NY, USA, 4–8 August 2008. [Google Scholar]
- Elfiky, N.M.; Akbar, S.A.; Sun, J.; Park, J.; Kak, A. Automation of dormant pruning in specialty crop production: An adaptive framework for automatic reconstruction and modeling of apple trees. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Boston, MA, USA, 7–12 June 2015. [Google Scholar]
- Palubicki, W.; Horel, K.; Longay, S.; Runions, A.; Lane, B.; Měch, R.; Prusinkiewicz, P. Self-organizing tree models for image synthesis. ACM Trans. Graph. (TOG) 2009, 28, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Ludwig, F. Baubotanik: Designing with Living Material, in Materiality and Architecture; Routledge: London, UK, 2016; pp. 206–216. [Google Scholar]
- Alhasan, A.; Younkin, K.; White, D.J. Comparison of Roadway Roughness Derived from LIDAR and SFM 3D Point Clouds; Iowa State University, Institute for Transportation: Ames, IA, USA, 2015. [Google Scholar]
- Lau, A.; Bentley, L.P.; Martius, C.; Shenkin, A.; Bartholomeus, H.; Raumonen, P.; Malhi, Y.; Jackson, T.; Herold, M. Quantifying branch architecture of tropical trees using terrestrial LiDAR and 3D modelling. Trees 2018, 32, 1219–1231. [Google Scholar] [CrossRef] [Green Version]
- Raumonen, P.; Kaasalainen, M.; Åkerblom, M.; Kaasalainen, S.; Kaartinen, H.; Vastaranta, M.; Holopainen, M.; Disney, M.; Lewis, P. Fast automatic precision tree models from terrestrial laser scanner data. Remote Sens. 2013, 5, 491–520. [Google Scholar] [CrossRef]
- Delagrange, S.; Jauvin, C.; Rochon, P. PypeTree: A tool for reconstructing tree perennial tissues from point clouds. Sensors 2014, 14, 4271–4289. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hackenberg, J.; Spiecker, H.; Calders, K.; Disney, M.; Raumonen, P. SimpleTree—An efficient open source tool to build tree models from TLS clouds. Forests 2015, 6, 4245–4294. [Google Scholar] [CrossRef]
- Åkerblom, M.; Raumonen, P.; Kaasalainen, M.; Casella, E. Analysis of geometric primitives in quantitative structure models of tree stems. Remote Sens. 2015, 7, 4581–4603. [Google Scholar]
- Du, S.; Lindenbergh, R.; Ledoux, H.; Stoter, J.; Nan, L. AdTree: Accurate, detailed, and automatic modelling of laser-scanned trees. Remote Sens. 2019, 11, 2074. [Google Scholar] [CrossRef] [Green Version]
- Baran, I.; Popović, J. Automatic rigging and animation of 3d characters. ACM Trans. Graph. (TOG) 2007, 26, 72-es. [Google Scholar] [CrossRef]
- Hu, S.; He, P.; He, D. Motion Capture and Estimation of Dynamic Properties for Realistic Tree Animation. In International Workshop on Next Generation Computer Animation Techniques; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Quigley, E.; Yu, Y.; Huang, J.; Lin, W.; Fedkiw, R. Real-time interactive tree animation. IEEE Trans. Vis. Comput. Graph. 2017, 24, 1717–1727. [Google Scholar] [CrossRef]
- Talamo, C.; Bonanomi, M.M. The impact of digitalization on processes and organizational structures of architecture and engineering firms. In Digital Transformation of the Design, Construction and Management Processes of the Built Environment; Daniotti, B., Gianinetto, M., Della Torre, S., Eds.; Springer: Cham, Switzerland, 2020; pp. 175–185. [Google Scholar]
- Komzák, J.; Slavík, P. Scaleable GIS data transmission and visualisation. In Proceedings of the Seventh International Conference on Information Visualization, London, UK, 18 July 2003. [Google Scholar]
- Yan, G.; Hu, R.; Wang, Y.; Ren, H.; Song, W.; Qi, J.; Chen, L. Scale effect in indirect measurement of leaf area index. IEEE Trans. Geosci. Remote Sens. 2016, 54, 3475–3484. [Google Scholar] [CrossRef]
- Xie, Q.; Dash, J.; Huang, W.; Peng, D.; Qin, Q.; Mortimer, H.; Casa, R.; Pignatti, S.; Laneve, G.; Pascucci, S.; et al. Vegetation indices combining the red and red-edge spectral information for leaf area index retrieval. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 1482–1493. [Google Scholar] [CrossRef] [Green Version]
- Ren, Z.; Du, Y.; He, X.; Pu, R.; Zheng, H.; Hu, H. Spatiotemporal pattern of urban forest leaf area index in response to rapid urbanization and urban greening. J. For. Res. 2018, 29, 785–796. [Google Scholar] [CrossRef]
- Kutzner, T.; Chaturvedi, K.; Kolbe, T.H. CityGML 3.0: New functions open up new applications. PFG–J. Photogramm. Remote Sens. Geoinf. Sci. 2020, 88, 43–61. [Google Scholar] [CrossRef] [Green Version]
- Gobeawan, L.; Lin, E.S.; Tandon, A.; Yee, A.T.K.; Khoo, V.H.S.; Teo, S.N.; Yi, S.; Lim, C.W.; Wong, S.T.; Wise, D.J.; et al. Modeling Trees for Virtual Singapore: From Data Acquisition to CITYGML Models. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, XLII-4/W10, 55–62. [Google Scholar] [CrossRef]
- Lee, S.-K.; Koenig, R.; Petzold, F. Computational Support for Interactive Exploration of Urban Design Variants. In Proceedings of the 18th International Conference, CAAD Futures 2019, Daejeon, Republic of Korea, 26–29 June 2019; pp. 259–273. [Google Scholar]
- Seifert, N.; Mühlhaus, M.; Petzold, F. Urban strategy playground: Rethinking the urban planner’s toolbox. Int. J. Archit. Comput. 2020, 18, 20–40. [Google Scholar] [CrossRef]
- Reinhard, K. Urban design synthesis for building layouts based on evolutionary many-criteria optimization. Int. J. Archit. Comput. 2015, 13, 257–269. [Google Scholar] [CrossRef]
- Kirnbauer, M.; Kenney, W.; Churchill, C.; Baetz, B. A prototype decision support system for sustainable urban tree planting programs. Urban For. Urban Green. 2009, 8, 3–19. [Google Scholar] [CrossRef]
- Gabriel, M.; Fellner, J.; Reitberger, R.; Lang, W.; Petzold, F. Voxel based method for real-time calculation of urban shading studies. In Proceedings of the 12th Symposium on Simulation for Architecture and Urban Design (SimAUD), Virtual Event, USC, Los Angeles, CA, USA, 15–17 April 2021. [Google Scholar]
- Huttner, S.; Bruse, M. Numerical modeling of the urban climate—A preview on ENVI-met 4.0. In Proceedings of the 7th International Conference on Urban Climate ICUC-7, Yokohama, Japan, 29 June–3 July 2009. [Google Scholar]
- Chokhachian, A.; Hiller, M. PANDO: Parametric tool for simulating soil-plant-atmosphere of tree canopies in grasshopper. In Proceedings of the 11th Annual Symposium on Simulation for Architecture and Urban Design, Virtual Event, USC, Los Angeles, CA, USA, 25–27 May 2020. [Google Scholar]
- Motamedi, A.; Hammad, A.; Asen, Y. Knowledge-assisted BIM-based visual analytics for failure root cause detection in facilities management. Autom. Constr. 2014, 43, 73–83. [Google Scholar] [CrossRef]
- Rafiee, A.; Dias, E.; Fruijtier, S.; Scholten, H. From BIM to geo-analysis: View coverage and shadow analysis by BIM/GIS integration. Procedia Environ. Sci. 2014, 22, 397–402. [Google Scholar] [CrossRef] [Green Version]
- Messner, J.; Anumba, C.; Dubler, C.; Goodman, S.; Kasprzak, C.; Kreider, R.; Leicht, R.; Saluja, C.; Zikic, N. BIM Project Execution Planning Guide (v. 2.2); Computer Integrated Construction Research Program, Pennsylvania State University: University Park, PA, USA, 2019. [Google Scholar]
- Latiffi, A.A.; Brahim, J.; Fathi, M.S. The development of building information modeling (BIM) definition. In Applied Mechanics and Materials; TRANS TECH PUBL: Zurich, Switzerland, 2014. [Google Scholar]
- Lasseck, M. Image-based Plant Species Identification with Deep Convolutional Neural Networks. In CLEF (Working Notes), CEUR Workshop Proceedings Vol-1866; Conference and Labs of the Evaluation Forum: Dublin, Ireland, 2017. [Google Scholar]
- St-Onge, B.; Vega, C.; Fournier, R.A.; Hu, Y. Mapping canopy height using a combination of digital stereo-photogrammetry and lidar. Int. J. Remote Sens. 2008, 29, 3343–3364. [Google Scholar] [CrossRef]
- Cornea, N.D.; Silver, D.; Min, P. Curve-skeleton properties, applications, and algorithms. IEEE Trans. Vis. Comput. Graph. 2007, 13, 530. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Huang, H.; Wu, S.; Cohen-Or, D.; Gong, M.; Zhang, H.; Li, G.; Chen, B. L1-medial skeleton of point cloud. ACM Trans. Graph. 2013, 32, 65:1–65:8. [Google Scholar] [CrossRef] [Green Version]
- Guo, J.; Xu, S.; Yan, D.-M.; Cheng, Z.; Jaeger, M.; Zhang, X. Realistic procedural plant modeling from multiple view images. IEEE Trans. Vis. Comput. Graph. 2018, 26, 1372–1384. [Google Scholar] [CrossRef] [PubMed]
- Wu, B.; Zheng, G.; Chen, Y.; Yu, D. TreeSke: A Structural-Lossless Skeleton Extraction Method for Point Cloud Data of Canopy Woody Materials. Preprint. Available online: https://www.researchsquare.com/article/rs-78239/v1 (accessed on 11 November 2022).
- Jin, S.; Su, Y.; Gao, S.; Wu, F.; Ma, Q.; Xu, K.; Hu, T.; Liu, J.; Pang, S.; Guan, H.; et al. Separating the structural components of maize for field phenotyping using terrestrial LiDAR data and deep convolutional neural networks. IEEE Trans. Geosci. Remote Sens. 2019, 58, 2644–2658. [Google Scholar] [CrossRef]
- Liu, Y.; Guo, J.; Benes, B.; Deussen, O.; Zhang, X.; Huang, H. TreePartNet: Neural decomposition of point clouds for 3D tree reconstruction. ACM Trans. Graph. 2021, 40, 1–16. [Google Scholar] [CrossRef]
- Middleton, W.; Shu, Q.; Ludwig, F. Representing living architecture through skeleton reconstruction from point clouds. Sci. Rep. 2022, 12, 1–13. [Google Scholar] [CrossRef]
- Vonderach, C.; Voegtle, T.; Adler, P. Voxel-based approach for estimating urban tree volume from terrestrial laser scanning data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 39, 451–456. [Google Scholar] [CrossRef] [Green Version]
- Van der Zande, D.; Stuckens, J.; Verstraeten, W.W.; Muys, B.; Coppin, P. Assessment of light environment variability in broadleaved forest canopies using terrestrial laser scanning. Remote Sens. 2010, 2, 1564–1574. [Google Scholar] [CrossRef] [Green Version]
- Béland, M.; Widlowski, J.-L.; Fournier, R.A. A model for deriving voxel-level tree leaf area density estimates from ground-based LiDAR. Environ. Model. Softw. 2014, 51, 184–189. [Google Scholar] [CrossRef]
- Wu, D.; Phinn, S.; Johansen, K.; Robson, A.; Muir, J.; Searle, C. Estimating changes in leaf area, leaf area density, and vertical leaf area profile for mango, avocado, and macadamia tree crowns using terrestrial laser scanning. Remote Sens. 2018, 10, 1750. [Google Scholar] [CrossRef] [Green Version]
- Hosoi, F.; Omasa, K. Voxel-based 3-D modeling of individual trees for estimating leaf area density using high-resolution portable scanning lidar. IEEE Trans. Geosci. Remote Sens. 2006, 44, 3610–3618. [Google Scholar] [CrossRef]
- Li, S.; Dai, L.; Wang, H.; Wang, Y.; He, Z.; Lin, S. Estimating leaf area density of individual trees using the point cloud segmentation of terrestrial LiDAR data and a voxel-based model. Remote Sens. 2017, 9, 1202. [Google Scholar] [CrossRef] [Green Version]
- Gärtner, H.; Wagner, B.; Heinrich, I.; Denier, C. 3D-laser scanning: A new method to analyze coarse tree root systems. For. Snow Landsc. Res. 2009, 82, 95–106. [Google Scholar]
- Hruska, J.; Čermák, J.; Šustek, S. Mapping tree root systems with ground-penetrating radar. Tree Physiol. 1999, 19, 125–130. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Amato, M.; Basso, B.; Celano, G.; Bitella, G.; Morelli, G.; Rossi, R. In situ detection of tree root distribution and biomass by multi-electrode resistivity imaging. Tree Physiol. 2008, 28, 1441–1448. [Google Scholar] [CrossRef]
- Kniemeyer, O.; Buck-Sorlin, G.; Kurth, W. GroIMP as a platform for functional-structural modelling of plants. Frontis 2007, 22, 43–52. [Google Scholar]
- Chan, W.-L.; Eng, Y.; Ge, Z.; Lim, C.W.C.; Gobeawan, L.; Poh, H.J.; Wise, D.J.; Burcham, D.C.; Lee, D.; Cui, Y.; et al. Wind loading on scaled down fractal tree models of major urban tree species in Singapore. Forests 2020, 11, 803. [Google Scholar] [CrossRef]
- Enshassi, M.A.; al Hallaq, K.A.; Tayeh, B.A. Limitation factors of building information modeling (BIM) implementation. Open Constr. Build. Technol. J. 2019, 13, 189–196. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scales | Urban | District | Single Build Project |
|---|---|---|---|
| topics and purposes | Land use and planning | Thermal comfort, ecosystem services | Structural performance, operation, and maintenance, building economy |
| tools and databases | GIS, CityGML | Environmental design-decision-support platform | Building Information Modeling |
| Suitable models for trees | Population model, Raster image | Global representation, Spatial decomposition (voxel cells) | Topological skeleton Cylindrical pipes |
| Common Geometric Representation (for Structural Model) | Common Physiological Parameters (for Functional Models) | Common Environmental Factors | |||
|---|---|---|---|---|---|
| Leaf | Branch (Incl. Stem) | Root | |||
| Forestry science | Crown as an elliptical sphere by its height and diameter | Trunk as a cylinder by DBH and crown height | Not involved | Leaf surface area; sap flux; | Climate; temperature; population density |
| FSPM | Individual leaf as a rectangle by its length, width, and position | L-system with turtle interpretation | L-system with turtle interpretation | Water transit; carbon assimilation and allocation | Gravity; light rays; |
| Mechanical calculation | Windward area, leaf density and drag | Trunk as a unilaterally fixed, tapered cantilever beam | A joint with viscoelastic properties | Not involved | Wind velocity, temperature, moisture content |
| Land resource management | Leaf area index in pixels | Not involved | Not involved | Not involved | Near-infrared spectroscopy; red spectrum; |
| BIM | Crown as an elliptical sphere | Trunk as a cylinder | Not involved | Not involved | Not involved |
| TIM | Voxel by leaf area density | Topological skeleton and pipelines | Layer by iso-density curves and depth | Water transit; to be developed | To be developed |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shu, Q.; Rötzer, T.; Detter, A.; Ludwig, F. Tree Information Modeling: A Data Exchange Platform for Tree Design and Management. Forests 2022, 13, 1955. https://doi.org/10.3390/f13111955
Shu Q, Rötzer T, Detter A, Ludwig F. Tree Information Modeling: A Data Exchange Platform for Tree Design and Management. Forests. 2022; 13(11):1955. https://doi.org/10.3390/f13111955
Chicago/Turabian StyleShu, Qiguan, Thomas Rötzer, Andreas Detter, and Ferdinand Ludwig. 2022. "Tree Information Modeling: A Data Exchange Platform for Tree Design and Management" Forests 13, no. 11: 1955. https://doi.org/10.3390/f13111955